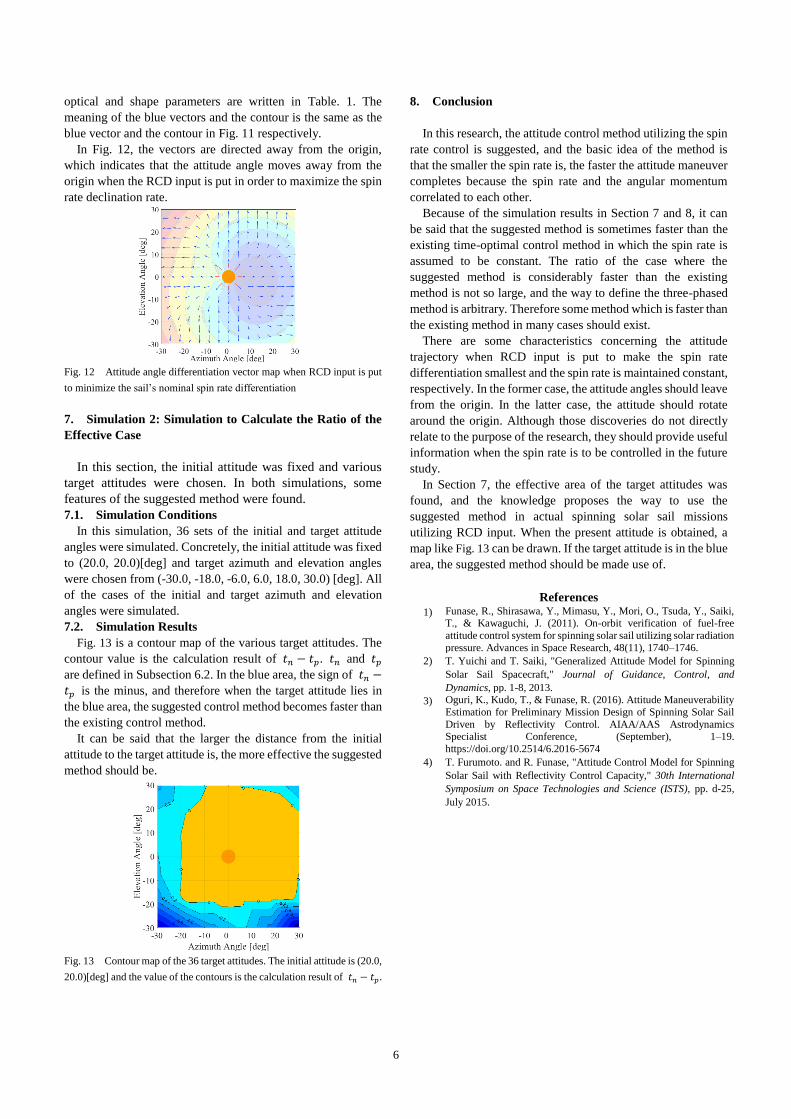
1 Rapid Control of Attitude Angles for Spinning Solar Sail Utilizing Spin Rate Change with Reflectivity Control Devices By Takumi KUDO, Kenshiro OGURI, and Ryu FUNASE 1) 1) Department of Aeronautics and Astronautics, The University of Tokyo, Tokyo, Japan This paper suggests a new way of controlling a spinning solar sail rapidly with a reflectivity control device. The basic idea of the control method of this study is that the smaller the sail’s nominal spin rate is, the faster the attitude maneuver completes. In order to reduce the spin rate, this study uses RCD input to control not only the sail’s attitude angles but also the sail’s nominal spin rate. 1296 cases of initial and target attitude were simulated, and it was found that in approximatel y 28.7% of all cases, attitude trajectory time was considerably smaller than a post method. This study also found a new characteristic of attitude trajectory when the spin rate is controlled by RCD input. Key Words: Reflectivity control device, Spinning solar sail, Spin rate control, Attitude control Nomenclature : Azimuth angle relative to the solar direction: ∈ℝ : Elevation angle relative to the solar direction: ∈ℝ : The sail’s nominal spin rate: ∈ℝ : Phase angle where RCD switches from off to on: ∈ℝ : The azimuth angle of the solar direction: ∈ℝ s : Elevation angle of the solar direction: ∈ℝ Subscripts n : The suggested method p : The past method 1. Introduction Attitude control of spinning solar sail using a reflectivity control device (RCD) has been attracting much attention in recent years because the device doesn’t need any fuel for attitude control. RCD is a liquid crystal device which can change its reflectivity characteristic by electrically switching on and off; turning RCD on increases the ratio of specular reflection, and turning RCD off increases the ratio of diffuse reflection. Switching on and off varies the influence of SRP on dynamics of spacecraft, which realizes attitude control of a spinning solar sail. In fact, possibility of attitude control by RCD input has been verified by IKAROS mission 1) . Attitude control methods by RCD input have been proposed in recent years. For example, Oguri et al analytically derived a time-optimal attitude control law from Extended-GSSM 3), 4) , which is a dynamics model of a spinning solar sail controlled by RCDs. Although the time-optimal attitude control law puts an assumption that the sail’s nominal spin rate is maintained constant, a control law which takes advantage of the spin rate change should be proposed. In fact, on the condition that the spin rate is not maintained constant, faster solutions with regard to the attitude trajectory time appear when a numerical calculation is conducted. Therefore the present paper proposes a faster strategy of attitude maneuver regarding time. The method proposed in this paper takes advantage of the spin rate control. The consideration of spin rate control realizes a faster attitude control strategy of a spinning solar sail with RCD control input. Fig. 1 Concept of attitude control system utilizing reflectivity control device. The RCD pictures of the figures are cited from 1) 2. Attitude Dynamics Model of Spinning Solar Sail with RCD Input In order to derive faster attitude control law of spinning solar sail with RCD input than the law suggested in 3), this section defines the sail’s attitude, the RCD input and the differential equation of the attitude to be used in this paper. 2.1. Definition of Sail’s Attitude Angles, Spin Rate and RCD input This paper uses the sail’s state variable ( , ,) defined in 5); attitude angle α and are the azimuth and elevation angles measured from the sun direction vector s, respectively, and is the sail’s nominal spin rate (see Fig. 2). is a phase angle measured from the intersection line between the ecliptic
Transcript
1
Rapid Control of Attitude Angles for Spinning Solar Sail
Utilizing Spin Rate Change with Reflectivity Control Devices
By Takumi KUDO, Kenshiro OGURI, and Ryu FUNASE1)
1)Department of Aeronautics and Astronautics, The University of Tokyo, Tokyo, Japan
This paper suggests a new way of controlling a spinning solar sail rapidly with a reflectivity control device. The basic idea
of the control method of this study is that the smaller the sail’s nominal spin rate is, the faster the attitude maneuver
completes. In order to reduce the spin rate, this study uses RCD input to control not only the sail’s attitude angles but also
the sail’s nominal spin rate. 1296 cases of initial and target attitude were simulated, and it was found that in approximately
28.7% of all cases, attitude trajectory time was considerably smaller than a post method. This study also found a new
characteristic of attitude trajectory when the spin rate is controlled by RCD input.
Key Words: Reflectivity control device, Spinning solar sail, Spin rate control, Attitude control
Nomenclature
�̃� : Azimuth angle relative to the solar
direction: �̃� ∈ ℝ
𝛿 : Elevation angle relative to the solar
direction: 𝛿 ∈ ℝ
𝛺 : The sail’s nominal spin rate: 𝛺 ∈ ℝ
𝜙 : Phase angle where RCD switches from
off to on: 𝜙 ∈ ℝ
𝛼𝑠 : The azimuth angle of the solar direction:
𝛼𝑠 ∈ ℝ
𝛿s : Elevation angle of the solar direction:
𝛿𝑠 ∈ ℝ
Subscripts
n : The suggested method
p : The past method
1. Introduction
Attitude control of spinning solar sail using a reflectivity
control device (RCD) has been attracting much attention in
recent years because the device doesn’t need any fuel for
attitude control. RCD is a liquid crystal device which can
change its reflectivity characteristic by electrically switching on
and off; turning RCD on increases the ratio of specular
reflection, and turning RCD off increases the ratio of diffuse
reflection. Switching on and off varies the influence of SRP on
dynamics of spacecraft, which realizes attitude control of a
spinning solar sail. In fact, possibility of attitude control by
RCD input has been verified by IKAROS mission 1).
Attitude control methods by RCD input have been proposed
in recent years. For example, Oguri et al analytically derived a
time-optimal attitude control law from Extended-GSSM3), 4),
which is a dynamics model of a spinning solar sail controlled
by RCDs.
Although the time-optimal attitude control law puts an
assumption that the sail’s nominal spin rate is maintained
constant, a control law which takes advantage of the spin rate
change should be proposed. In fact, on the condition that the
spin rate is not maintained constant, faster solutions with regard
to the attitude trajectory time appear when a numerical
calculation is conducted.
Therefore the present paper proposes a faster strategy of
attitude maneuver regarding time. The method proposed in this
paper takes advantage of the spin rate control. The
consideration of spin rate control realizes a faster attitude
control strategy of a spinning solar sail with RCD control input.
Fig. 1 Concept of attitude control system utilizing reflectivity control
device. The RCD pictures of the figures are cited from 1)
2. Attitude Dynamics Model of Spinning Solar Sail with
RCD Input
In order to derive faster attitude control law of spinning solar
sail with RCD input than the law suggested in 3), this section
defines the sail’s attitude, the RCD input and the differential
equation of the attitude to be used in this paper.
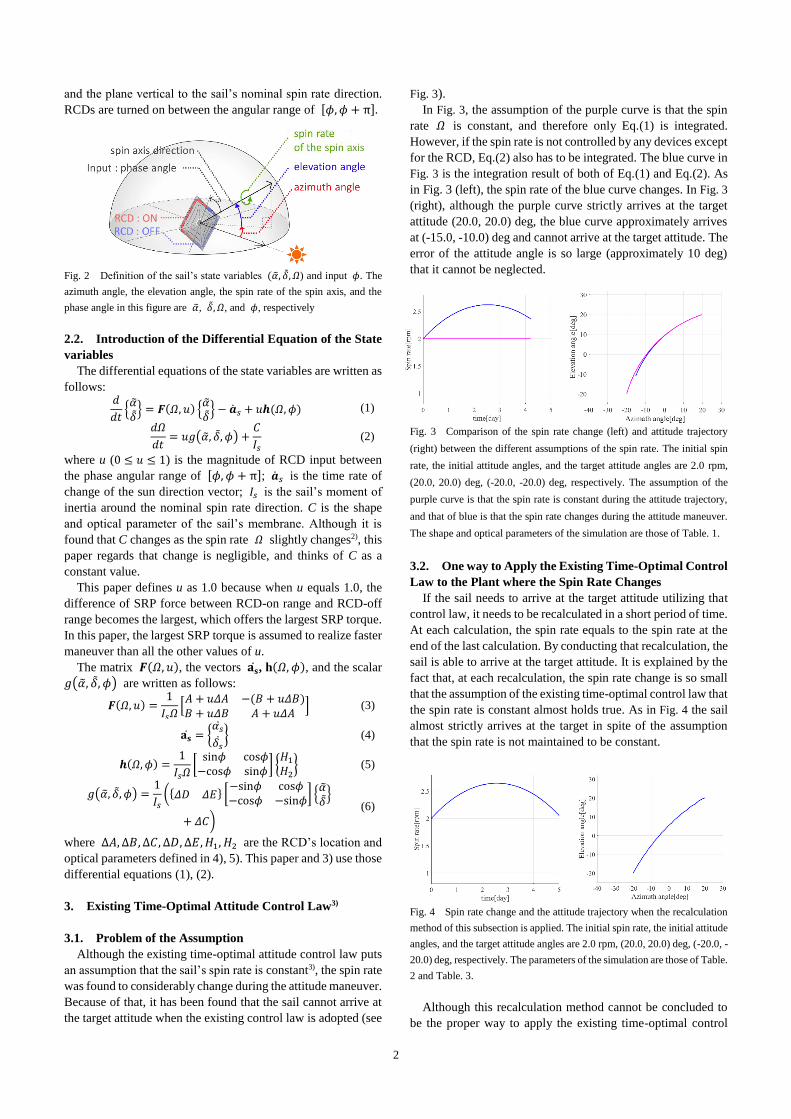
2.1. Definition of Sail’s Attitude Angles, Spin Rate and
RCD input
This paper uses the sail’s state variable (�̃�, 𝛿, 𝛺) defined in
5); attitude angle α̃ and 𝛿 are the azimuth and elevation
angles measured from the sun direction vector s, respectively,
and 𝛺 is the sail’s nominal spin rate (see Fig. 2). 𝜙 is a phase
angle measured from the intersection line between the ecliptic
2
and the plane vertical to the sail’s nominal spin rate direction.
RCDs are turned on between the angular range of [𝜙, 𝜙 + π].
Fig. 2 Definition of the sail’s state variables (�̃�, 𝛿, 𝛺) and input 𝜙. The
azimuth angle, the elevation angle, the spin rate of the spin axis, and the
phase angle in this figure are �̃�, 𝛿, 𝛺, and 𝜙, respectively
2.2. Introduction of the Differential Equation of the State
variables
The differential equations of the state variables are written as
follows: 𝑑
𝑑𝑡{�̃�𝛿
} = 𝑭(𝛺, 𝑢) {�̃�𝛿
} − �̇�𝑠 + 𝑢𝒉(𝛺, 𝜙) (1)
𝑑𝛺
𝑑𝑡= 𝑢𝑔(�̃�, 𝛿, 𝜙) +
𝐶
𝐼𝑠 (2)
where u (0 ≤ 𝑢 ≤ 1) is the magnitude of RCD input between
the phase angular range of [𝜙, 𝜙 + π]; �̇�𝑠 is the time rate of
change of the sun direction vector; 𝐼𝑠 is the sail’s moment of
inertia around the nominal spin rate direction. C is the shape
and optical parameter of the sail’s membrane. Although it is
found that C changes as the spin rate 𝛺 slightly changes2), this
paper regards that change is negligible, and thinks of C as a
constant value.
This paper defines u as 1.0 because when u equals 1.0, the
difference of SRP force between RCD-on range and RCD-off
range becomes the largest, which offers the largest SRP torque.
In this paper, the largest SRP torque is assumed to realize faster
maneuver than all the other values of u.
The matrix 𝑭(𝛺, 𝑢), the vectors 𝐚�̇�, h(𝛺, 𝜙), and the scalar
𝑔(�̃�, 𝛿, 𝜙) are written as follows:
𝑭(𝛺, 𝑢) =1
𝐼𝑠𝛺[𝐴 + 𝑢𝛥𝐴 −(𝐵 + 𝑢𝛥𝐵)𝐵 + 𝑢𝛥𝐵 𝐴 + 𝑢𝛥𝐴
] (3)
𝐚�̇� = {𝛼�̇�
𝛿�̇�} (4)
𝒉(𝛺, 𝜙) =1
𝐼𝑠𝛺[
sin𝜙 cos𝜙−cos𝜙 sin𝜙
] {𝐻1
𝐻2} (5)
𝑔(�̃�, 𝛿, 𝜙) =1
𝐼𝑠({𝛥𝐷 𝛥𝐸} [
−sin𝜙 cos𝜙−cos𝜙 −sin𝜙
] {�̃�𝛿
}
+ 𝛥𝐶)
(6)
where Δ𝐴, Δ𝐵, Δ𝐶, Δ𝐷, Δ𝐸, 𝐻1, 𝐻2 are the RCD’s location and
optical parameters defined in 4), 5). This paper and 3) use those
differential equations (1), (2).
3. Existing Time-Optimal Attitude Control Law3)
3.1. Problem of the Assumption
Although the existing time-optimal attitude control law puts
an assumption that the sail’s spin rate is constant3), the spin rate
was found to considerably change during the attitude maneuver.
Because of that, it has been found that the sail cannot arrive at
the target attitude when the existing control law is adopted (see
Fig. 3).
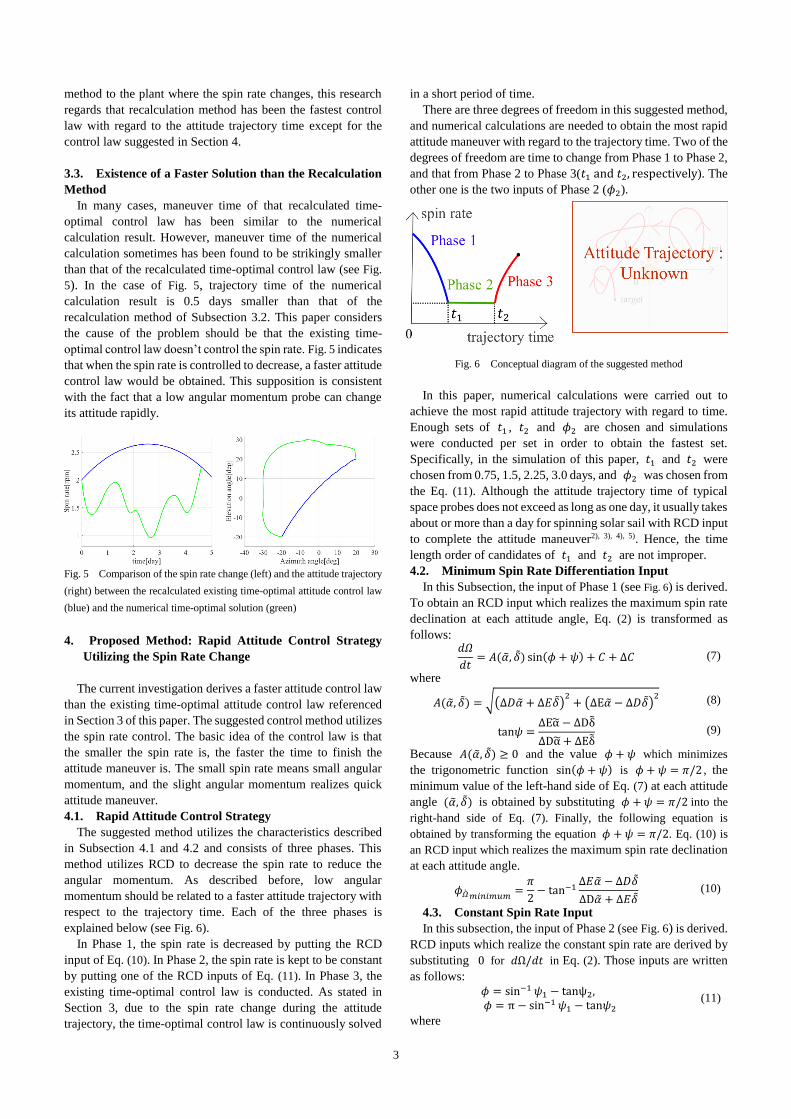
In Fig. 3, the assumption of the purple curve is that the spin
rate 𝛺 is constant, and therefore only Eq.(1) is integrated.
However, if the spin rate is not controlled by any devices except
for the RCD, Eq.(2) also has to be integrated. The blue curve in
Fig. 3 is the integration result of both of Eq.(1) and Eq.(2). As
in Fig. 3 (left), the spin rate of the blue curve changes. In Fig. 3
(right), although the purple curve strictly arrives at the target
attitude (20.0, 20.0) deg, the blue curve approximately arrives
at (-15.0, -10.0) deg and cannot arrive at the target attitude. The
error of the attitude angle is so large (approximately 10 deg)
that it cannot be neglected.
Fig. 3 Comparison of the spin rate change (left) and attitude trajectory
(right) between the different assumptions of the spin rate. The initial spin
rate, the initial attitude angles, and the target attitude angles are 2.0 rpm,
(20.0, 20.0) deg, (-20.0, -20.0) deg, respectively. The assumption of the
purple curve is that the spin rate is constant during the attitude trajectory,
and that of blue is that the spin rate changes during the attitude maneuver.
The shape and optical parameters of the simulation are those of Table. 1.
3.2. One way to Apply the Existing Time-Optimal Control
Law to the Plant where the Spin Rate Changes
If the sail needs to arrive at the target attitude utilizing that
control law, it needs to be recalculated in a short period of time.
At each calculation, the spin rate equals to the spin rate at the
end of the last calculation. By conducting that recalculation, the
sail is able to arrive at the target attitude. It is explained by the
fact that, at each recalculation, the spin rate change is so small
that the assumption of the existing time-optimal control law that
the spin rate is constant almost holds true. As in Fig. 4 the sail
almost strictly arrives at the target in spite of the assumption
that the spin rate is not maintained to be constant.
Fig. 4 Spin rate change and the attitude trajectory when the recalculation
method of this subsection is applied. The initial spin rate, the initial attitude
angles, and the target attitude angles are 2.0 rpm, (20.0, 20.0) deg, (-20.0, -
20.0) deg, respectively. The parameters of the simulation are those of Table.
2 and Table. 3.
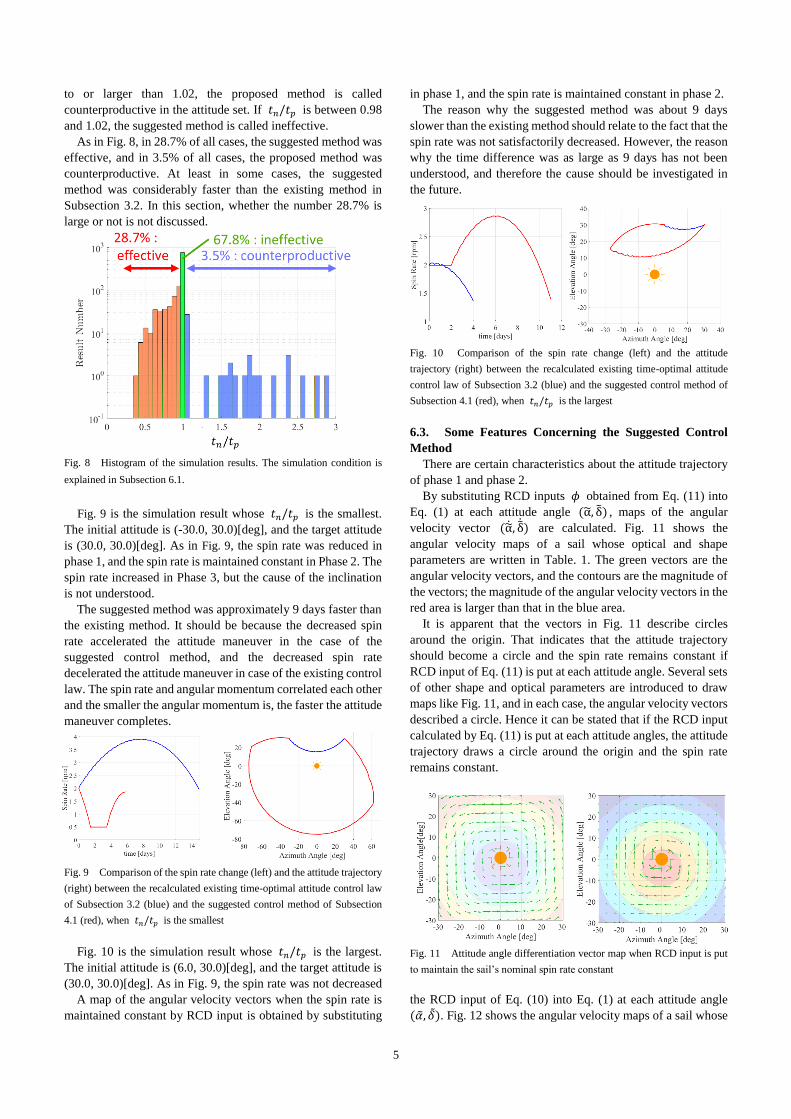
Although this recalculation method cannot be concluded to
be the proper way to apply the existing time-optimal control
3
method to the plant where the spin rate changes, this research
regards that recalculation method has been the fastest control
law with regard to the attitude trajectory time except for the
control law suggested in Section 4.
3.3. Existence of a Faster Solution than the Recalculation
Method
In many cases, maneuver time of that recalculated time-
optimal control law has been similar to the numerical
calculation result. However, maneuver time of the numerical
calculation sometimes has been found to be strikingly smaller
than that of the recalculated time-optimal control law (see Fig.
5). In the case of Fig. 5, trajectory time of the numerical
calculation result is 0.5 days smaller than that of the
recalculation method of Subsection 3.2. This paper considers
the cause of the problem should be that the existing time-
optimal control law doesn’t control the spin rate. Fig. 5 indicates
that when the spin rate is controlled to decrease, a faster attitude
control law would be obtained. This supposition is consistent
with the fact that a low angular momentum probe can change
its attitude rapidly.
Fig. 5 Comparison of the spin rate change (left) and the attitude trajectory
(right) between the recalculated existing time-optimal attitude control law
(blue) and the numerical time-optimal solution (green)
4. Proposed Method: Rapid Attitude Control Strategy
Utilizing the Spin Rate Change
The current investigation derives a faster attitude control law
than the existing time-optimal attitude control law referenced
in Section 3 of this paper. The suggested control method utilizes
the spin rate control. The basic idea of the control law is that
the smaller the spin rate is, the faster the time to finish the
attitude maneuver is. The small spin rate means small angular
momentum, and the slight angular momentum realizes quick
attitude maneuver.
4.1. Rapid Attitude Control Strategy
The suggested method utilizes the characteristics described
in Subsection 4.1 and 4.2 and consists of three phases. This
method utilizes RCD to decrease the spin rate to reduce the
angular momentum. As described before, low angular
momentum should be related to a faster attitude trajectory with
respect to the trajectory time. Each of the three phases is
explained below (see Fig. 6).
In Phase 1, the spin rate is decreased by putting the RCD
input of Eq. (10). In Phase 2, the spin rate is kept to be constant
by putting one of the RCD inputs of Eq. (11). In Phase 3, the
existing time-optimal control law is conducted. As stated in
Section 3, due to the spin rate change during the attitude
trajectory, the time-optimal control law is continuously solved
in a short period of time.
There are three degrees of freedom in this suggested method,
and numerical calculations are needed to obtain the most rapid
attitude maneuver with regard to the trajectory time. Two of the
degrees of freedom are time to change from Phase 1 to Phase 2,
and that from Phase 2 to Phase 3(𝑡1 and 𝑡2, respectively). The
other one is the two inputs of Phase 2 (𝜙2).
Fig. 6 Conceptual diagram of the suggested method
In this paper, numerical calculations were carried out to
achieve the most rapid attitude trajectory with regard to time.
Enough sets of 𝑡1 , 𝑡2 and 𝜙2 are chosen and simulations
were conducted per set in order to obtain the fastest set.
Specifically, in the simulation of this paper, 𝑡1 and 𝑡2 were
chosen from 0.75, 1.5, 2.25, 3.0 days, and 𝜙2 was chosen from
the Eq. (11). Although the attitude trajectory time of typical
space probes does not exceed as long as one day, it usually takes
about or more than a day for spinning solar sail with RCD input
to complete the attitude maneuver2), 3), 4), 5). Hence, the time
length order of candidates of 𝑡1 and 𝑡2 are not improper.
4.2. Minimum Spin Rate Differentiation Input
In this Subsection, the input of Phase 1 (see Fig. 6) is derived.
To obtain an RCD input which realizes the maximum spin rate
declination at each attitude angle, Eq. (2) is transformed as
follows: 𝑑𝛺
𝑑𝑡= 𝐴(�̃�, 𝛿) sin(𝜙 + 𝜓) + 𝐶 + Δ𝐶 (7)
where
𝐴(�̃�, 𝛿) = √(Δ𝐷�̃� + Δ𝐸𝛿)2
+ (ΔE�̃� − Δ𝐷𝛿)2 (8)
tan𝜓 =ΔEα̃ − ΔDδ̃
ΔDα̃ + ΔEδ̃ (9)
Because 𝐴(�̃�, 𝛿) ≥ 0 and the value 𝜙 + 𝜓 which minimizes
the trigonometric function sin(𝜙 + 𝜓) is 𝜙 + 𝜓 = 𝜋/2 , the
minimum value of the left-hand side of Eq. (7) at each attitude
angle (�̃�, 𝛿) is obtained by substituting 𝜙 + 𝜓 = 𝜋/2 into the
right-hand side of Eq. (7). Finally, the following equation is
obtained by transforming the equation 𝜙 + 𝜓 = 𝜋/2. Eq. (10) is
an RCD input which realizes the maximum spin rate declination
at each attitude angle.
𝜙�̇�𝑚𝑖𝑛𝑖𝑚𝑢𝑚=
𝜋
2− tan−1
Δ𝐸�̃� − Δ𝐷𝛿
ΔD�̃� + Δ𝐸𝛿 (10)
4.3. Constant Spin Rate Input
In this subsection, the input of Phase 2 (see Fig. 6) is derived.
RCD inputs which realize the constant spin rate are derived by
substituting 0 for 𝑑Ω/𝑑𝑡 in Eq. (2). Those inputs are written
as follows:
𝜙 = sin−1 𝜓1 − tanψ2, 𝜙 = π − sin−1 𝜓1 − tan𝜓2
(11)
where
4
𝜓1 =𝐶 + Δ𝐶
√(ΔDα̃ − ΔEδ̃)2
+ (Δ𝐸�̃� − Δ𝐷𝛿)2
(12)
𝜓2 =Δ𝐸�̃� − Δ𝐷𝛿
Δ𝐷�̃� + Δ𝐸𝛿 (13)
5. Spacecraft Specification
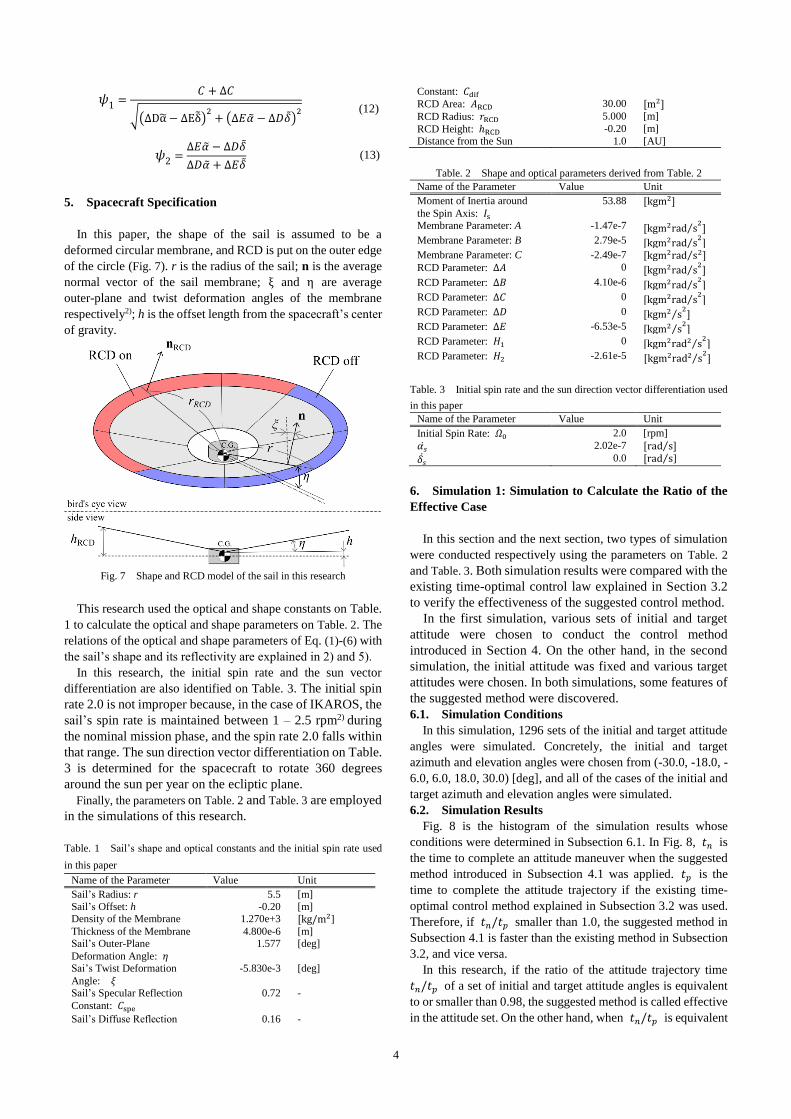
In this paper, the shape of the sail is assumed to be a
deformed circular membrane, and RCD is put on the outer edge
of the circle (Fig. 7). r is the radius of the sail; n is the average
normal vector of the sail membrane; ξ and η are average
outer-plane and twist deformation angles of the membrane
respectively2); h is the offset length from the spacecraft’s center
of gravity.
Fig. 7 Shape and RCD model of the sail in this research
This research used the optical and shape constants on Table.
1 to calculate the optical and shape parameters on Table. 2. The
relations of the optical and shape parameters of Eq. (1)-(6) with
the sail’s shape and its reflectivity are explained in 2) and 5).
In this research, the initial spin rate and the sun vector
differentiation are also identified on Table. 3. The initial spin
rate 2.0 is not improper because, in the case of IKAROS, the
sail’s spin rate is maintained between 1 – 2.5 rpm2) during
the nominal mission phase, and the spin rate 2.0 falls within
that range. The sun direction vector differentiation on Table.
3 is determined for the spacecraft to rotate 360 degrees
around the sun per year on the ecliptic plane.
Finally, the parameters on Table. 2 and Table. 3 are employed
in the simulations of this research.
Table. 1 Sail’s shape and optical constants and the initial spin rate used
in this paper
Name of the Parameter Value Unit
Sail’s Radius: r 5.5 [m]
Sail’s Offset: h -0.20 [m] Density of the Membrane 1.270e+3 [kg/m2]
Thickness of the Membrane 4.800e-6 [m] Sail’s Outer-Plane