All information presented in this document and all supplementary materials and programming code represent only my personal opinion and current understanding and has not received any endorsement or approval by IPT - Intellectual Products and Technologies or any third party. It should not be taken as any kind of advice, and should not be used for making any kind of decisions with potential commercial impact.
The information and code presented may be incorrect or incomplete. It is provided "as is", without warranty of any kind, express or implied, including but not limited to the warranties of merchantability, fitness for a particular purpose and non-infringement. In no event shall the author or copyright holders be liable for any claim, damages or other liability, whether in an action of contract, tort or otherwise, arising from, out of or in connection with the information, materials or code presented or the use or other dealings with this information or programming code.
3
Trademarks
Oracle®, Java™ and JavaScript™ are trademarks or registered trademarks of Oracle and/or its affiliates.
LEGO® is a registered trademark of LEGO® Group. Programs are not affiliated, sponsored or endorsed by LEGO® Education or LEGO® Group.
Raspberry Pi™ is a trademark of Raspberry Pi Foundation.
Other names may be trademarks of their respective owners.
Tales of JAVA Robotics
4
There are so several tales to share:
Tale of Robotics, IoT and Complexity
Tale of Common Sense: DDD
Tale of two cities - Imperative and Reactive
Tale of two brave robots: LeJaRo and IPTPI
And some real reactive Java + TypeScript / Angular 2 /
CC BY 2.0, Source: https://www.flickr.com/photos/wilgengebroed/8249565455/
Radar, GPS, lidar for navigation and obstacle avoidance ( 2007 DARPA Urban Challenge )
The Internet of Things has the potential to change the world, just as the Internet did. Maybe even more so.
Nearly 50 petabytes of data are captured and created by human beings
People have limited time, attention and accuracy
Capturing data about things in the real world in real time
Track and count everything, reduce waste, loss & cost.
Know when things need replacing, repairing or recalling
— Kevin Ashton, 'That 'Internet of Things' Thing', RFID Journal, 2009
Internet of Things (IoT)
There will be nearly 26 billion devices on the Internet of Things by 2020.
[Gartner]
More than 30 billion devices will be wirelessly connected to the Internet of Things by 2020
[ABI Research]
It's expected to be a 19 Trillion USD market [John Chambers, Cisco CEO]
IoT Perspectives
"Basket of remotes" problem – we'll have hundreds of applications to interface with hundreds of devices that don't share protocols for speaking with one another
[Jean-Louis Gassée, Apple initial team, and BeOS co-founder]
Only IPv6 addresses are not enough – IoT devices should be also easily and directly accessible for users and [their] agents
In read/write mode
Preferably using a standard web browser
Even behind firewalls
IoT - Need for Standards
IoT Services Architecture
14
Devices: Hardware + Embedded Software + Firmware
UART/ I2C/ 2G/ 3G/ LTE/ ZigBee/ 6LowPan/ BLE
Aggregation/ Bus: ESB, Message Broker
Device Gateway: Local Coordination and Event Aggregation
Subscriber – calls Subscription.request(long) to receive notifications
Subscription – one-to-one Subscriber ↔ Publisher, request data and cancel demand (allow cleanup).
Processor = Subscriber + Publisher
FRP = Async Data Streams
25
FRP is asynchronous data-flow programming using the building blocks of functional programming (e.g. map, reduce, filter) and explicitly modeling time
Used for GUIs, robotics, and music. Example (RxJava): Observable.from(new String[]{"Reactive", "Extensions", "Java"}) .take(2).map(s -> s + " : on " + new Date()) .subscribe(s -> System.out.println(s));Result: Reactive : on Wed Jun 17 21:54:02 GMT+02:00 2015Extensions : on Wed Jun 17 21:54:02 GMT+02:00 2015
26
Performance is about 2 things (Martin Thompson – http://www.infoq.com/articles/low-latency-vp ):– Throughput – units per second, and – Latency – response time
Real-time – time constraint from input to response regardless of system load.
Hard real-time system if this constraint is not honored then a total system failure can occur.
Soft real-time system – low latency response with little deviation in response time
100 nano-seconds to 100 milli-seconds. [Peter Lawrey]
Mechanical Sympathy – hardware (CPU, cache, memory, IO, Network), operating system, language implementation platform (e.g. JVM), and application level code are working in harmony to minimize the time needed for event (request, message) processing => 10% / 90% principle
Throughput vs. latency – bus vs. car traveling
Throughput ~ System Capacity / Latency
Achieving low latency may mean additional work done by system => lowered System Capacity and Throughput
Horizontal scalability is valuable for high throughput. For low latency, you need simplicity – critical path.
Throughput vs. Latency
28
JVMs can be faster than custom C++ code because of the holistic optimizations that they can apply across an application [Andy Piper].
Developers can take advantage of hardware guarantees through a detailed understanding of:
– Java Memory Model & mapping to underlying hardware
– Compre-And-Swap – CAS (java.util.concurrent.atomic)
– lock-free, wait-free techniques – using standard libraries (e.g. the LMAX Disruptor)
High Performance Java
29
CPU Cache – False SharingCore 2 Core NCore 1 ...
Registers
Execution Units
L1 Cache A | | B |
L2 Cache A | | B |
L3 Cache A | | B |
DRAM Memory A | | B |
Registers
Execution Units
L1 Cache A | | B |
L2 Cache A | | B |
30
Low garbage by reusing existing objects + infrequent GC when application not busy – can improve app 2 - 5x
JVM generational GC startegy – ideal for objects living very shortly (garbage collected next minor sweep) or be immortal
Non-blocking, lockless coding or CAS
Critical data structures – direct memory access using DirectByteBuffers or Unsafe => predictable memory layout and cache misses avoidance
Busy waiting – giving the CPU to OS kernel slows program 2-5x => avoid context switches
Amortize the effect of expensive IO - blocking
Low Latency: Things to Remember
31
Parallel tasks can increase your throughput by increasing system capacity – it is GOOD!
But comes together with concurrent access to shared resources => you have to provide mutual exclusion (MutEx) by parallel threads when changing the resources' state (read only access can be shared by multiple threads)
Mutual exclusion can be achieved in several ways:
– synchronized – hardwired in HotSpot JVM, optimized in J^6
Non-blocking (synchronous) implementation is 2 orders of magnitude better then synchronized
We should try to avoid blocking and especially contended blocking if want to achieve low latency
If blocking is a must we have to prefer CAS and optimistic concurrency over blocking (but have in mind it always depends on concurrent problem at hand and how much contention do we experience – test early, test often, microbenchmarks are unreliable and highly platform dependent – test real application with typical load patterns)
The real question is: HOW is is possible to build concurrency without blocking?
Mutex Comparison => Conclusions
36
Message Driven – asynchronous message-passing allows to establish a boundary between components that ensures loose coupling, isolation, location transparency, and provides the means to delegate errors as messages [Reactive Manifesto].
The main idea is to separate concurrent producer and consumer workers by using message queues.
Message queues can be unbounded or bounded (limited max number of messages)
Unbounded message queues can present memory allocation problem in case the producers outrun the consumers for a long period → OutOfMemoryError
Scalable, Massively Concurrent
37
Queues typically use either linked-lists or arrays for the underlying storage of elements. Linked lists are not „mechanically sympathetic” – there is no predictable caching “stride” (should be less than 2048 bytes in each direction).
Bounded queues often experience write contention on head, tail, and size variables. Even if head and tail separated using CAS, they usually are in the same cache-line.
Queues produce much garbage.
Typical queues conflate a number of different concerns – producer and consumer synchronization and data storage
//enable sending commands to Arduino ArduinoCommandsSub = ArduinoFactory.getInstance() .createArduinoCommandSubscriber();
/
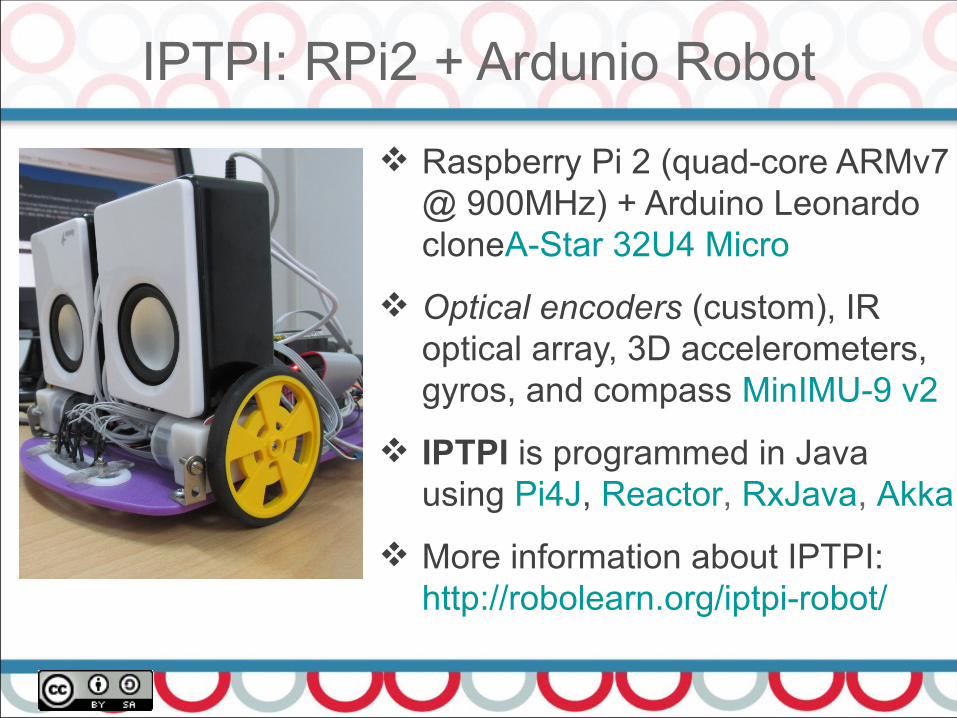
IPTPI: IPTPIDemo II
59
//Audio player - added @jPrime 2016 Hackergarten audio = AudioFactory.createAudioPlayer();
//wire robot main controller with services movementSub =MovementFactory.createMovementCommandSubscriber( positionsFlux, arduinoData.getLineReadingsFlux()); controller = new RobotController(this::tearDown, movementSub, arduinoCommandsSub, audio);
//create view with controller and delegate material views from query services view = new RobotView("IPTPI Reactive Robotics Demo", controller, presentationViews);
IPTPI: IPTPIDemo III
60
//expose as WS service movementSub2 =MovementFactory.createMovementCommandSubscriber( positionsFlux, arduinoData.getLineReadingsFlux()); positionsService = new RobotWSService( positionsFlux, movementSub2);}
EmitterProcessor – using 0 threads (on same thread)
TopicProcessor using – N threads concurrently processing the messages (AND operation)
WorkQueueProcessor – N threads alternatively processing the messages (XOR operation – messages are processed exactly by one thread – load ballancing and work distribution)
Q: How is vesion JDK on Raspbery?
73
IPTPI Reactive Demo uses Java 8 (Open JDK)
Reactor Core 3.x (latest version) requires Java 8+ to run (makes active use of Function API)
Q: Can I replace RPi2, I want to use Android?
74
Yes, there are many other single board computers that allow using Android like:
BeagleBone
PcDuino (LinkSprite)
ODROID (Hardkernel)
Q: Can you show how power is provided to all of devices?