Real-Time 3D Lunar Excavation Simulation using the Digital Spaces Open-Source Platform FINAL PROJECT PRESENTATION Bruce Damer, CEO, Digitalspace Corp Dave Rasmussen, Merryn Nelson, Peter Newman, DM3D Studios Brad Blair, Engineering
Transcript
Real-Time 3D Lunar Excavation Simulation using the Digital
Dave Rasmussen, Merryn Nelson, Peter Newman, DM3D Studios
Brad Blair, Engineering Consultant
May 31, 2007
Precursor Simulations
• Digitalspace (DS) generated prior driveable simulations of mobile lunar exploration and ISRU systems
• Relevant NASA SBIR-funded work included– CSM Bucket Wheel Excavator– NASA Robotic Lunar Exploration Rover– Physics models for these sims were limited to vehicle
mobility and arm articulation only
• A “Clean Room” simulation of a grabber arm and blocks was also created by DS for experimental purposes
CSM Bucket Wheel Excavator Simulation
RLEP 2 Mobility trade studyUse of Plow as Trenching Tool in Sampling Area
RLEP 2 Mobility trade studyDeployment of Drill Assembly-Lower Pose
RLEP 2 Mobility trade studyCut Away of Drill Action
RLEP 2 Mobility trade studyEngage Plow for Braking
DS “Clean Room” sim of grabber arm with blocks
DS “Clean Room” sim of grabber arm with blocks
Lunar Excavation Simulation
• A real-time, driveable, physics-based simulation was then proposed to NASA-SOMD as a tool to examine lunar excavation operations
• The physics model would be expanded to include soil mechanics
• An output file would be generated containing engineering data
• Partners for the project included National Securities Technology LLC and Los Alamos National Laboratories
Sketch of “Jell-O Block” concept
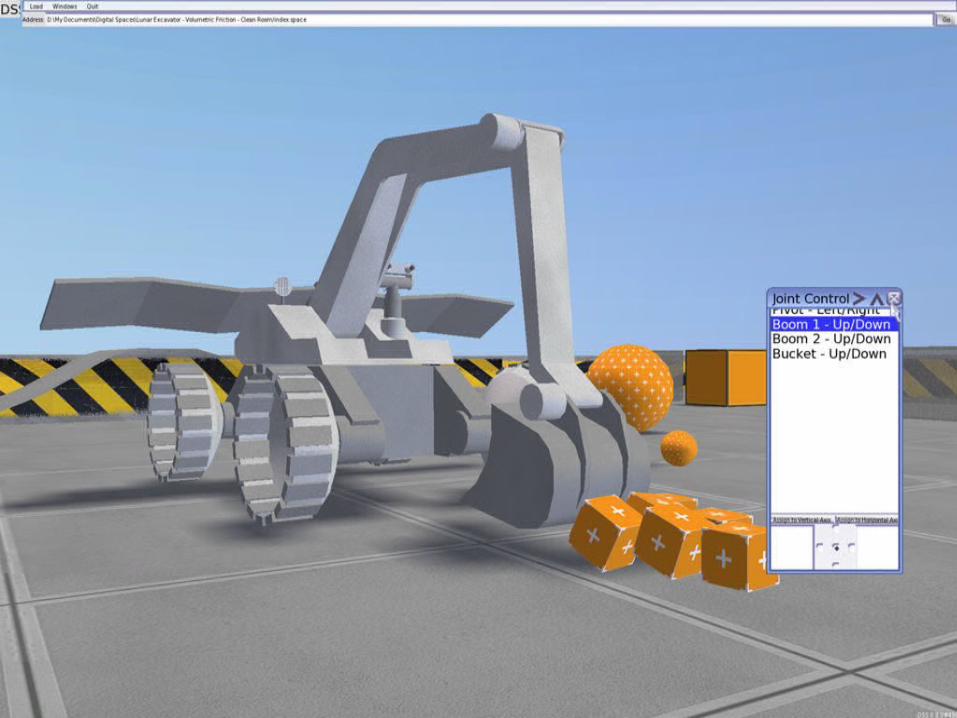
Sim #1: Backhoe in “Clean-Room” Environment
• Backhoe style excavator was created and rigged using physics model
• Jell-O blocks introduced into ‘clean room’ environment
• Volumetric friction (viscosity) used to provide ‘drag forces’ while bucket is inside block
Sim #2: Excavators and Balovnev Soil Mechanics Model
• No mobility in Sim #2• Concentrated on implementing proof-of-concept
for Balovnev soil mechanics model for excavator blade resistance
• Three excavators were modeled: Bucket Wheel, Front-end loader and Clamshell
• Lack of constraints caused tipping of mobility platforms (validating force increase with depth of penetration)
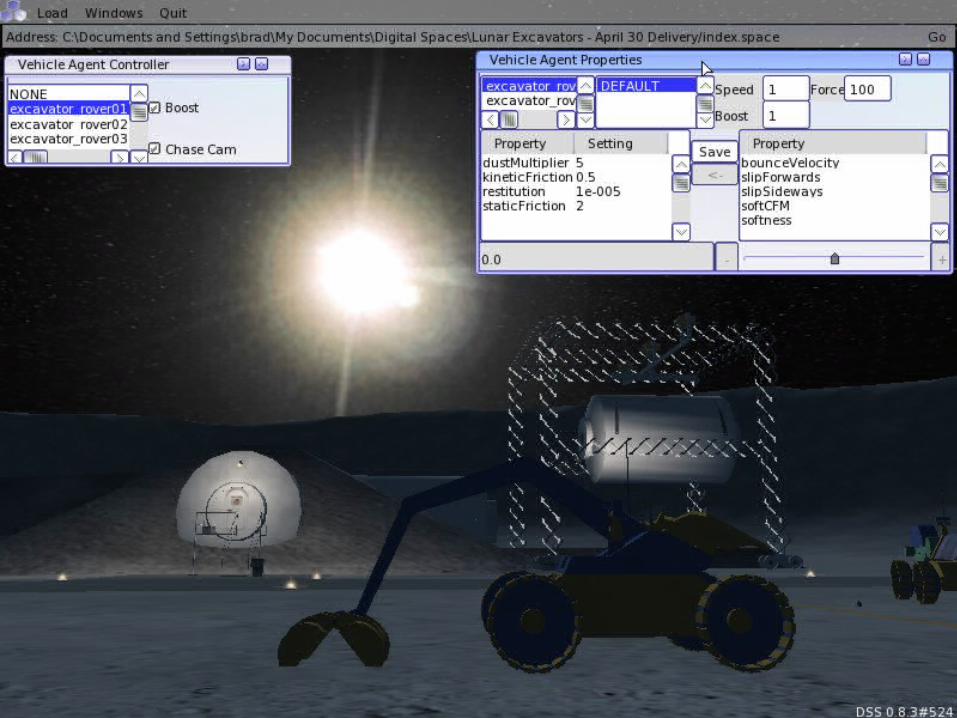
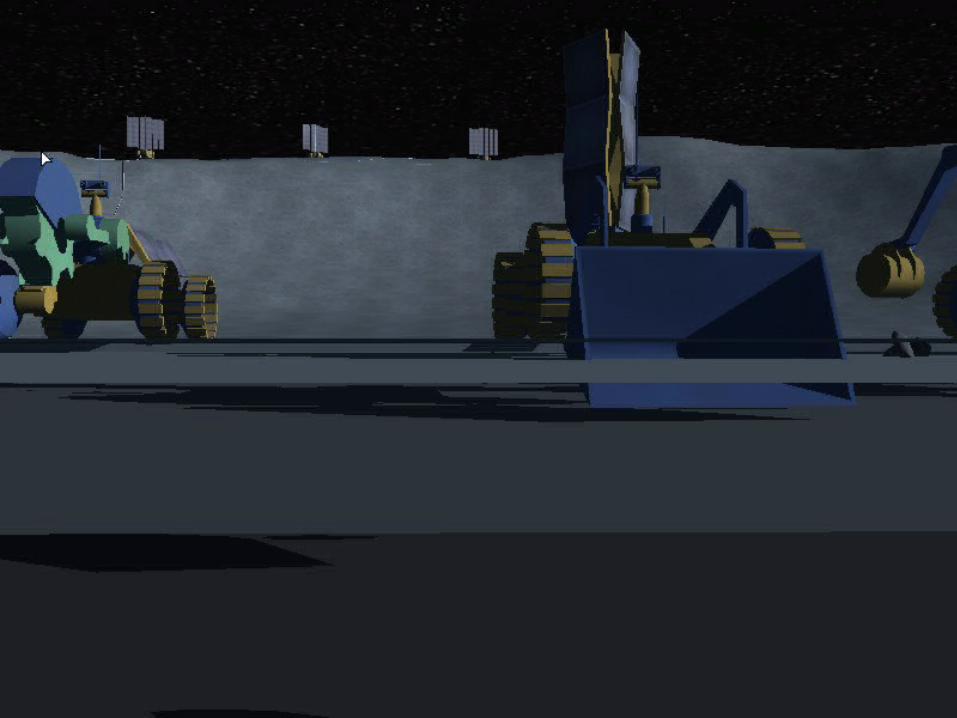
Sim #3: Lunar Excavators at Polar Lunar Base Site
• Three lunar excavation systems were then rigged, constrained to dig into the uppermost regolith layer, and placed in a simulated lunar polar base site
• Waypoints were added to automatically guide each excavator through a mining sequence
• Output files were generated for torques and forces for each excavator
• Sophisticated user interaction with physics model (including Balovnev soil resistance) was enabled through input windows
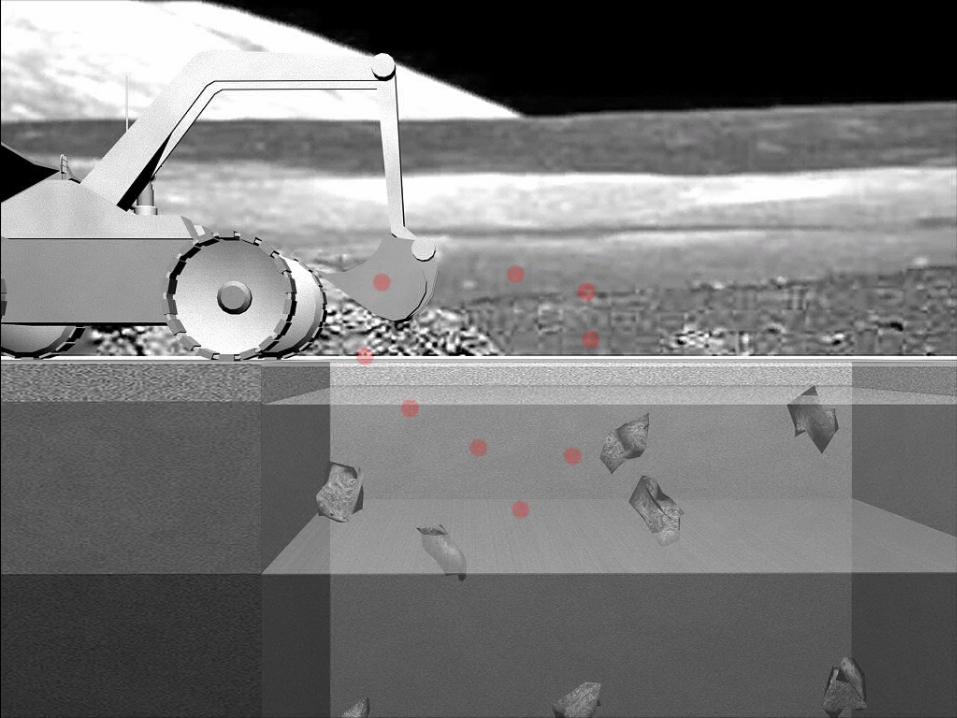
Sim #3 Cut-Away Views of Excavation Box
• An ‘Excavation Test Box’ was rigged with the Balovnev soil mechanics model in order to collect force and torque data
• The following views show the excavators penetrating the surface plane into the test box
• Three excavators automatically repeat the mining cycle by loading regolith then driving to the dump zone and unloading using waypoints
• Notice suspended rock hazards
Sim #4: Bucket Ladder Excavator
• A fourth simulation was built for the fourth excavator – a bucket ladder
• The system was placed in an ‘improved’ version of the lunar polar base site
• Physics modeling and user input windows were derived from simulation #3
• Minor improvements were made to ‘debug’ the DSS software platform and improve sim performance