Page 1
Realtime Control of a Mobile Robot Using
Matlab
by
Kai Wu, B.Eng
Thesis
Presented to the department of Electrical Engineering and Computer Science
The University of Applied Science Hamburg
for the Degree of
Master of Engineering
The University of Applied Science Hamburg
Oct 2004
Page 2
Realtime Control of a Mobile Robot Using
Matlab
Kai Wu, MEng.
The University of Applied Science Hamburg, 2004
Supervisor: Prof. Dr. Thomas Holzhueter
Second Supervisor: Prof. Dr. Ulf Claussen
In this thesis a real time control application for a mobile robot will be im-
plemented based on a MATLAB Simulink block diagram. The mobile robot
is called AmigoBot which has two driven wheels and 8 sonar sensors. The
block is built for running on the xPC Target which is a real time environment
provided by MATLAB. The control application will control the robot moving
along a wall at a certain distance. The track of the wall can be a straight one
or a curved one. The required distance can be a constant or a mathematic
function (e.g. a step function). This work is actually divided into two parts.
The first part is the construction of a communication block diagram which is
used for establishing a connection between the xPC Target and the AmigoBot.
The second part is creating a control system for the robot, which is based on
state-space control.
ii
Page 3
ACKNOWLEDGMENTS
Acknowledgments
I would like to thank Prof.Dr.Thomas Holzhueter, my supervisor who give
me this chance, for his many suggestions and constant support during this
research. I am also thankful to Mr.Zeyn-Kranz and Mr.Suchan for their ad-
vice and help for preparing the robot and other things for me.Thanks for
Prof.Dr.Ulf Claussen who’d like to be my second supervisor. Thanks for
Mr.Stender who shares his knowledge about the robot with me. Thanks for
my parents who are always supporting me.
Kai Wu
The University of Applied Science Hamburg
Oct 2004
iii
Page 4
CONTENTS
Contents
Abstract ii
Acknowledgments iii
List of Tables vii
List of Figures viii
Chapter 1 Introduction 1
1.1 Problem Overview . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Organization of the Thesis . . . . . . . . . . . . . . . . . . . . 5
Chapter 2 Design of the AmigoBot’s Communication Interface 7
2.1 The xPC Target . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.1 Host and Target PC . . . . . . . . . . . . . . . . . . . 8
2.1.2 xPC Target Software Set . . . . . . . . . . . . . . . . . 8
2.1.3 Downloading A Model to the Target PC . . . . . . . . 10
2.2 The AmigoBot . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2.1 Communication Packet Protocol . . . . . . . . . . . . . 14
2.2.2 Packet Data Types . . . . . . . . . . . . . . . . . . . . 15
2.2.3 Packet Checksum . . . . . . . . . . . . . . . . . . . . . 16
2.2.4 Packet Errors . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.5 Server Information Packets . . . . . . . . . . . . . . . . 16
2.2.6 Client Commands . . . . . . . . . . . . . . . . . . . . . 18
2.2.7 Client Command Argument Types . . . . . . . . . . . 20
2.3 Connection between the xPC Target and AmigoBot . . . . . . 20
2.4 The AmigoBot Communication Block . . . . . . . . . . . . . . 21
iv
Page 5
CONTENTS
Chapter 3 Implementation of the AmigoBot Communication Sys-
tem 22
3.1 Analyzing the Synchronization and Initialization Process . . 22
3.1.1 Analyzing the Synchronization Process . . . . . . . . . 22
3.1.2 Analyzing the Initialization Process . . . . . . . . . . 26
3.1.2.1 Opening the Servers–OPEN . . . . . . . . . . 26
3.1.2.2 Set the Sonar Firing Sequence–POLLING . . 26
3.1.2.3 Enable the Motor . . . . . . . . . . . . . . . . 27
3.1.3 Building the Synchronization and Initialization Model 27
3.1.3.1 Subsystem Synchronization and Initialization 32
3.2 Receive and Decode the SIPs . . . . . . . . . . . . . . . . . . 37
3.2.1 Subsystem Receive the SIPs . . . . . . . . . . . . . . . 37
3.2.2 Subsystem Decode the SIPs . . . . . . . . . . . . . . . 40
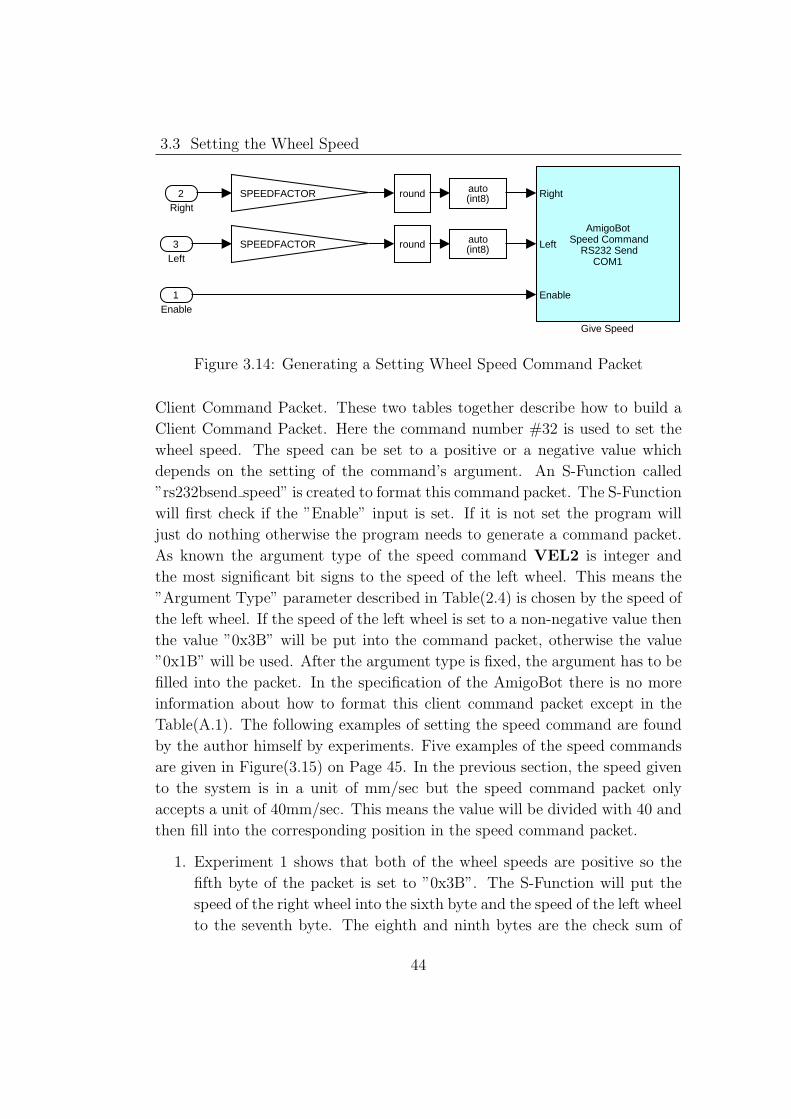
3.3 Setting the Wheel Speed . . . . . . . . . . . . . . . . . . . . . 43
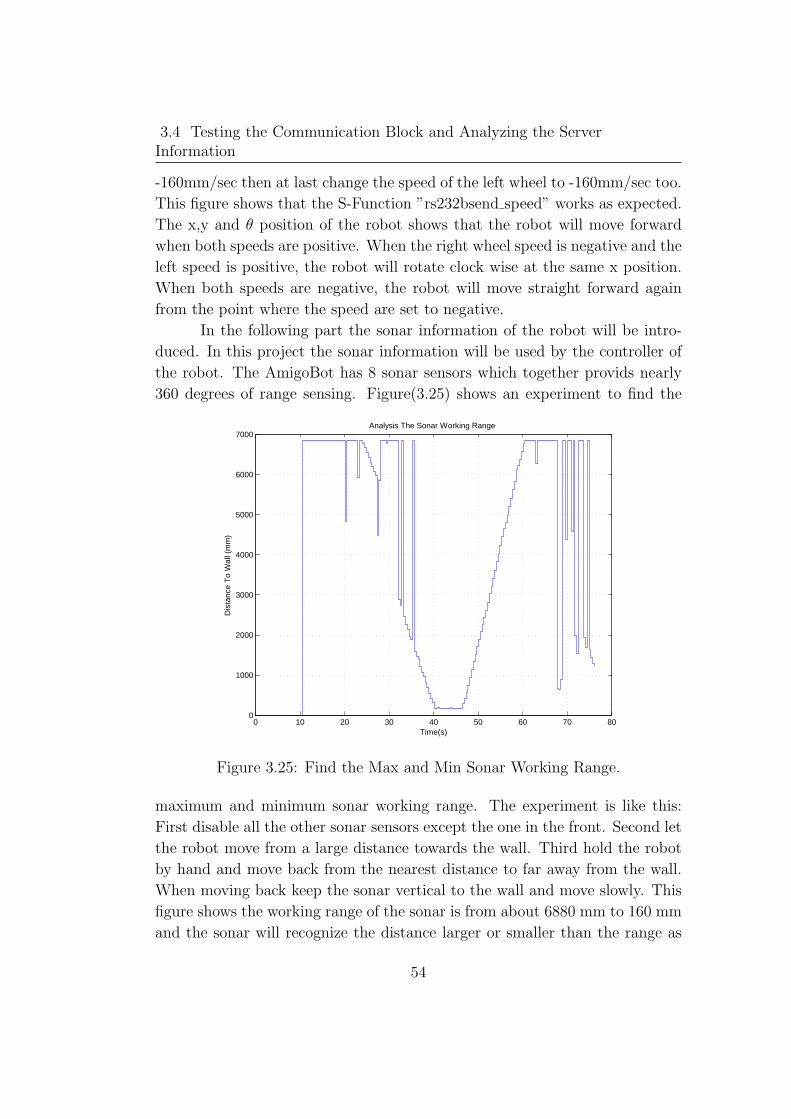
3.4 Testing the Communication Block and Analyzing the Server
Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Chapter 4 A Real-Time Control Application for the AmigoBot 58
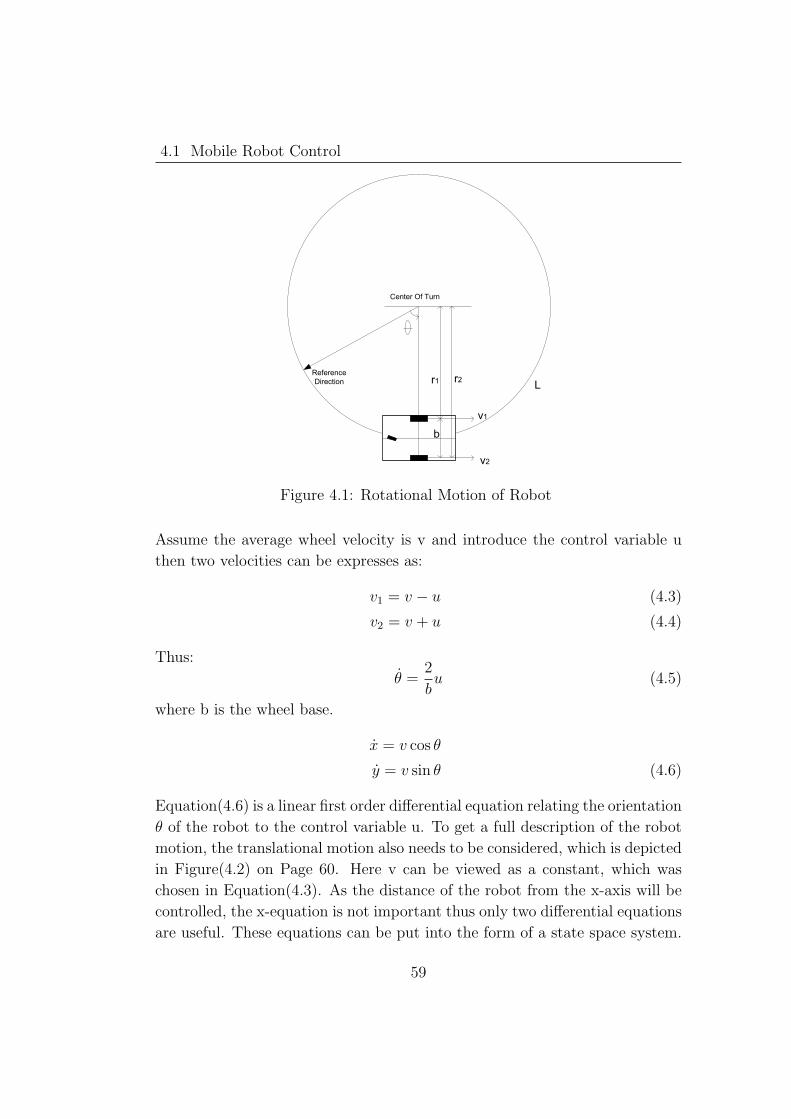
4.1 Mobile Robot Control . . . . . . . . . . . . . . . . . . . . . . 58
4.1.1 State Space System Basics . . . . . . . . . . . . . . . 60
4.1.2 State Space System of the AmigoBot . . . . . . . . . . 61
4.2 Design of the Control Loop of the AmigoBot . . . . . . . . . . 63
4.2.1 Building the Simulation Model . . . . . . . . . . . . . 63
4.2.2 Building the Real-Time Control Model . . . . . . . . . 70
4.3 Experimental Verification of the Robot Controller . . . . . . . 73
Chapter 5 Conclusions and Suggestions for Future Work 80
5.1 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5.2 Suggestions for the Future Work . . . . . . . . . . . . . . . . . 82
Appendix A AmigOS Command Set 83
Appendix B Initial File 87
Appendix C Control Parameter Setup File 89
Bibliography 92
v
Page 6
CONTENTS
Index 93
Vita 95
vi
Page 7
LIST OF TABLES
List of Tables
2.1 Main Elements of AmigOS Communication Packet Protocol . 15
2.2 AmigOS Communication Packet Data Types . . . . . . . . . . 15
2.3 Standard AmigOS Server Information Packet (SIP) . . . . . . 18
2.4 AmigOS Client Command Packet . . . . . . . . . . . . . . . . 19
3.1 Synchronization Test Case 1 . . . . . . . . . . . . . . . . . . . 24
3.2 Synchronization Test Case 2 . . . . . . . . . . . . . . . . . . . 24
3.3 Synchronization Test Case 3 . . . . . . . . . . . . . . . . . . . 24
3.4 Synchronization Test Case 4 . . . . . . . . . . . . . . . . . . . 25
3.5 AmigOS Wheel Speed Analysis (mm/sec) . . . . . . . . . . . . 52
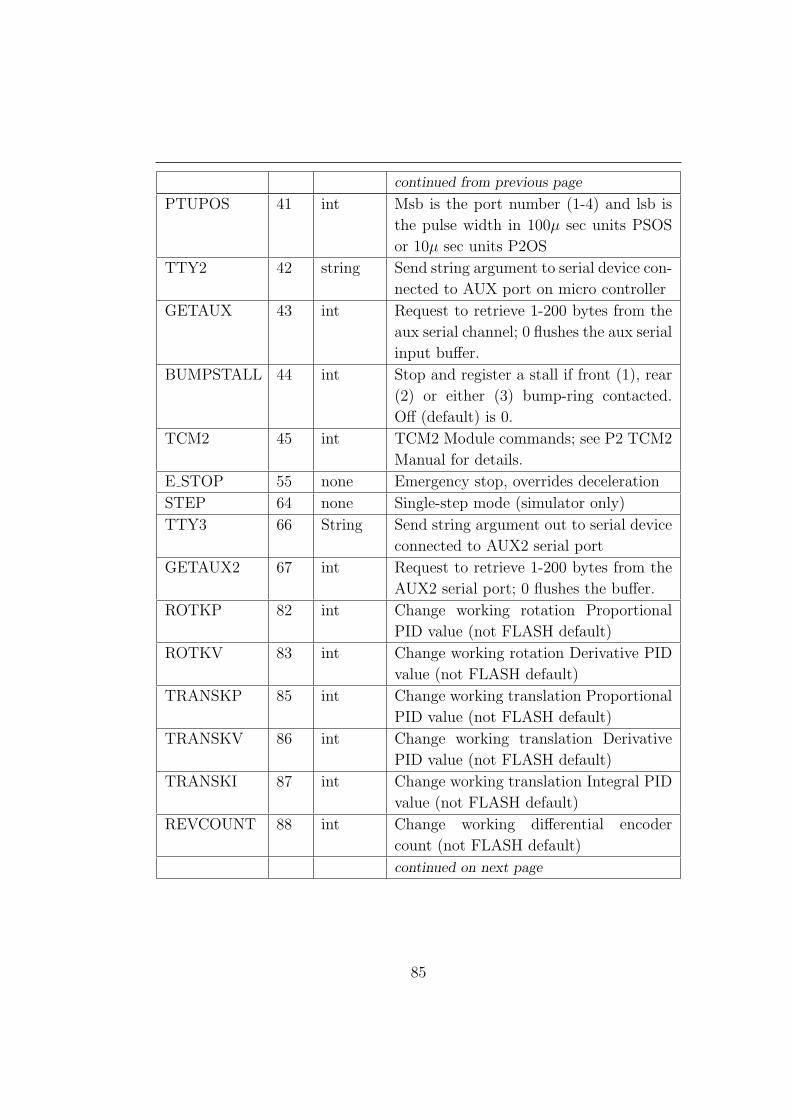
A.1 AmigOS Command Set . . . . . . . . . . . . . . . . . . . . . . 86
vii
Page 8
LIST OF FIGURES
List of Figures
2.1 Real-Time Workshop Code Generation Process . . . . . . . . 9
2.2 Hardware Connection between Target PC and Host PC . . . 11
2.3 Configuration of Target Boot Disk . . . . . . . . . . . . . . . 12
2.4 xPC Target Boots, the Kernel and Display Information on the
Target PC . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.5 Loading a MATLAB Simulink Model to xPC Target . . . . . . 13
2.6 AmigoBot’s Physical Characteristics. . . . . . . . . . . . . . . 13
2.7 AmigoBot’s Client-server Architecture . . . . . . . . . . . . . 14
2.8 Hardware Connection between Target PC and AmigoBot . . . 20
2.9 The AmigoBot Communication Block . . . . . . . . . . . . . 21
3.1 Flow Chart of How to Start The AmigoBot . . . . . . . . . . 28
3.2 AmigoBot Connector . . . . . . . . . . . . . . . . . . . . . . 29
3.3 Second Level of the AmigoBot Connector. . . . . . . . . . . . 31
3.4 Synchronization & Initialization. . . . . . . . . . . . . . . . . . 33
3.5 The RS232 Received Buffer on the Target PC . . . . . . . . . 34
3.6 Sending the SYNC0 Packet . . . . . . . . . . . . . . . . . . . 35
3.7 Receiving the Echo of SYNC0 . . . . . . . . . . . . . . . . . 35
3.8 Receiving the Echo of SYNC1 . . . . . . . . . . . . . . . . . 36
3.9 Subsystem Receiving SIP . . . . . . . . . . . . . . . . . . . . . 37
3.10 Sub Subsystem Receiving SIP . . . . . . . . . . . . . . . . . . 38
3.11 Decoding the SIP to User Wanted Data . . . . . . . . . . . . . 41
3.12 Sub Subsystem to Detect the Speed of the Left Wheel . . . . . 41
3.13 Sub Subsystem Get the Sonar Values: New Sonar Readings
SonarRangeA and SonarRangeB . . . . . . . . . . . . . . . . . 43
3.14 Generating a Setting Wheel Speed Command Packet . . . . . 44
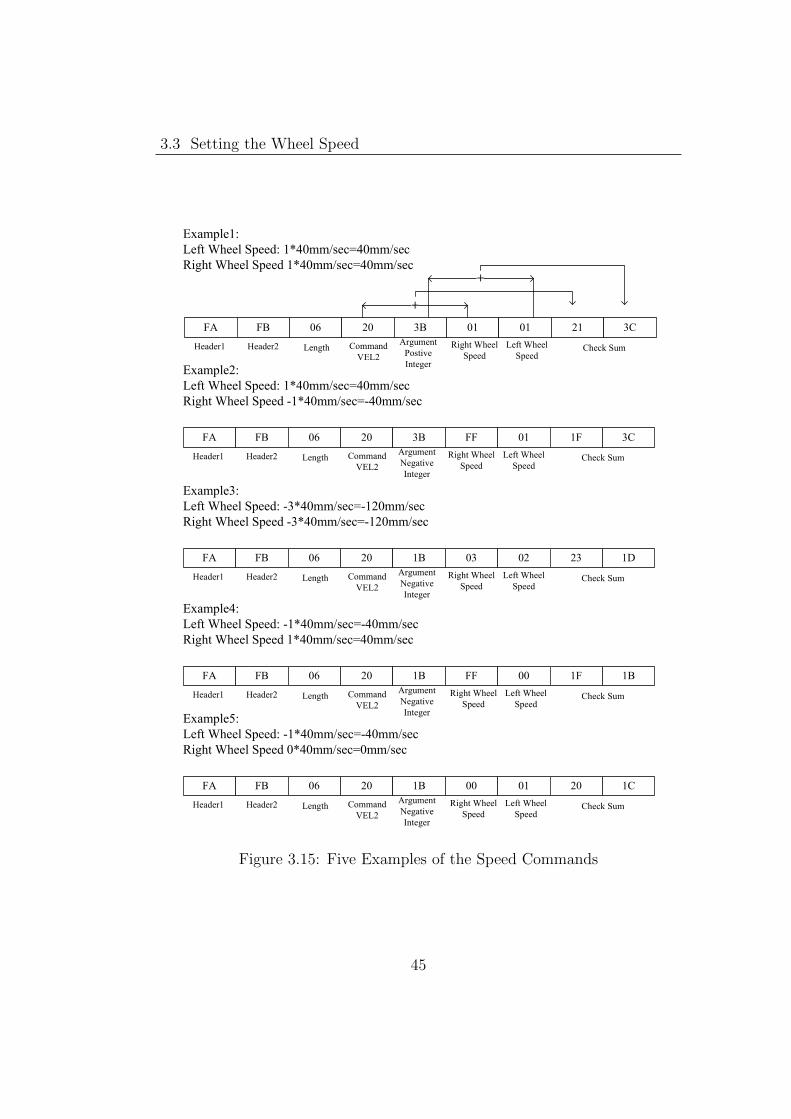
3.15 Five Examples of the Speed Commands . . . . . . . . . . . . . 45
viii
Page 9
LIST OF FIGURES
3.16 Timing Sequence Diagram of the Communication Block. . . . 47
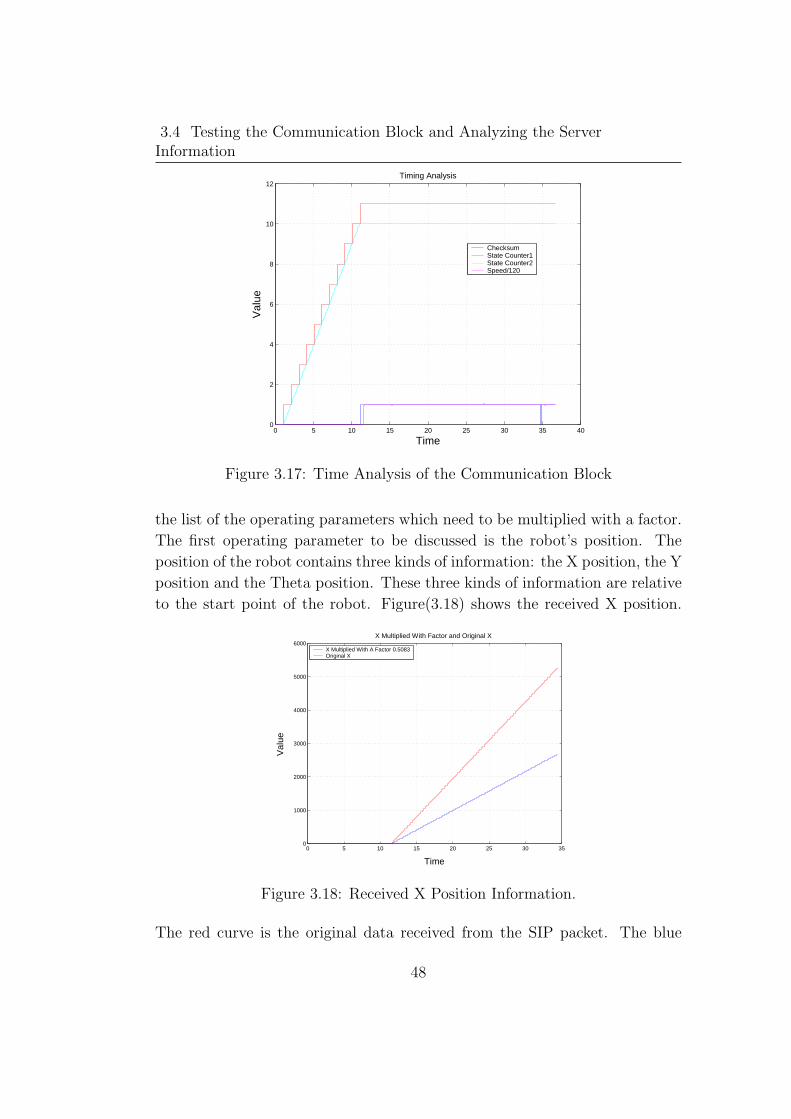
3.17 Time Analysis of the Communication Block . . . . . . . . . . 48
3.18 Received X Position Information. . . . . . . . . . . . . . . . . 48
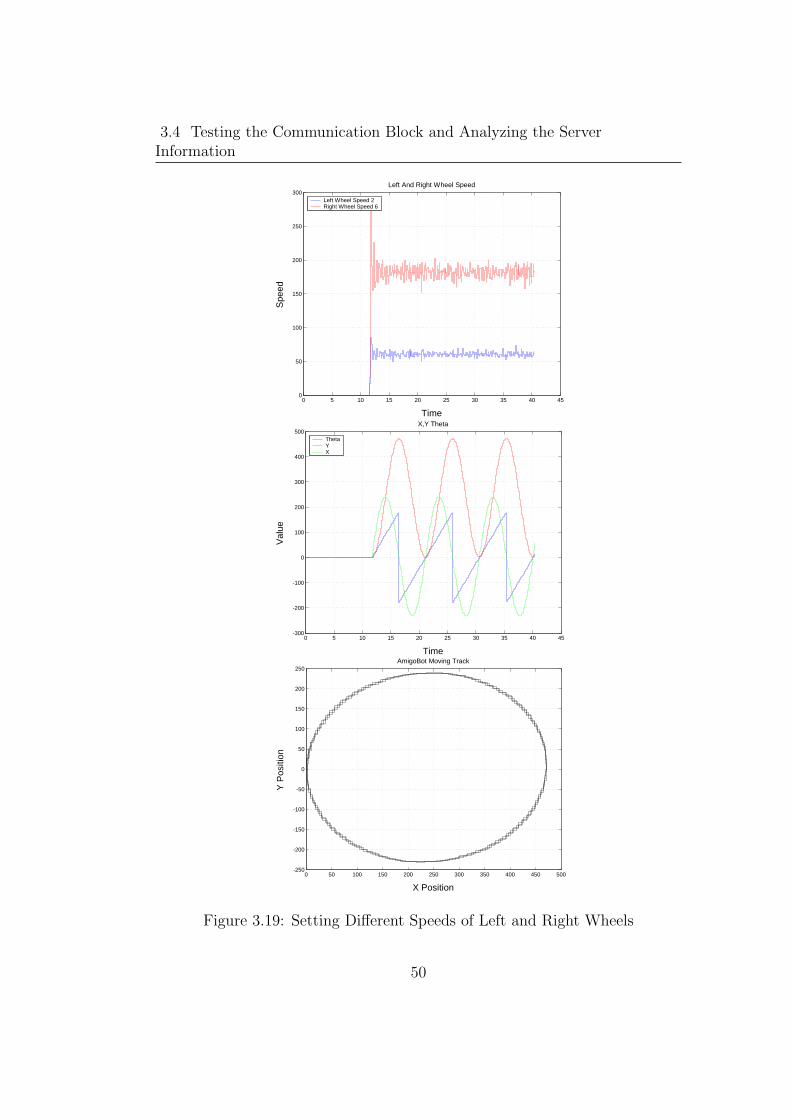
3.19 Setting Different Speeds of Left and Right Wheels . . . . . . . 50
3.20 Analyzing the Received Wheel Speed. . . . . . . . . . . . . . . 51
3.21 Received Left Wheel Speed with 7 Steps. . . . . . . . . . . . . 51
3.22 Received X Position Information (Wheel Speed with 6 Steps). 52
3.23 Find The Maximum Speed. . . . . . . . . . . . . . . . . . . . 53
3.24 Set the Left and Right Wheel Speed to Positive and Negative
Values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.25 Find the Max and Min Sonar Working Range. . . . . . . . . . 54
3.26 Experiment To Test the Behavior of the Sonar 5 . . . . . . . . 55
3.27 Experimental Results of Rotating the Sonar 5 . . . . . . . . . 56
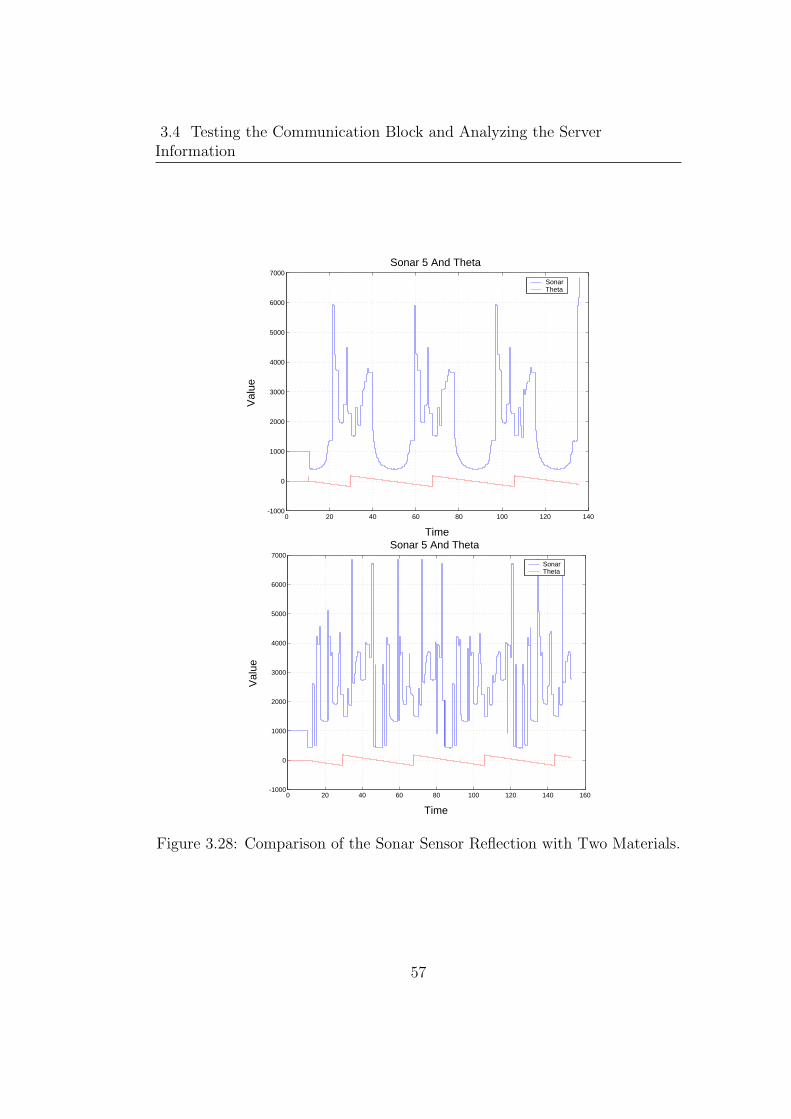
3.28 Comparison of the Sonar Sensor Reflection with Two Materials. 57
4.1 Rotational Motion of Robot . . . . . . . . . . . . . . . . . . . 59
4.2 Translational Motion of Robot . . . . . . . . . . . . . . . . . 60
4.3 A State Variable Control System . . . . . . . . . . . . . . . . 61
4.4 Non-linearized Mathematic Model of The AmigoBot. . . . . . 62
4.5 Linearized and Non-linearized Model of the Open loop Control
of the AmigoBot . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.6 Standard Control Loop for the Mobile Robot. . . . . . . . . . 63
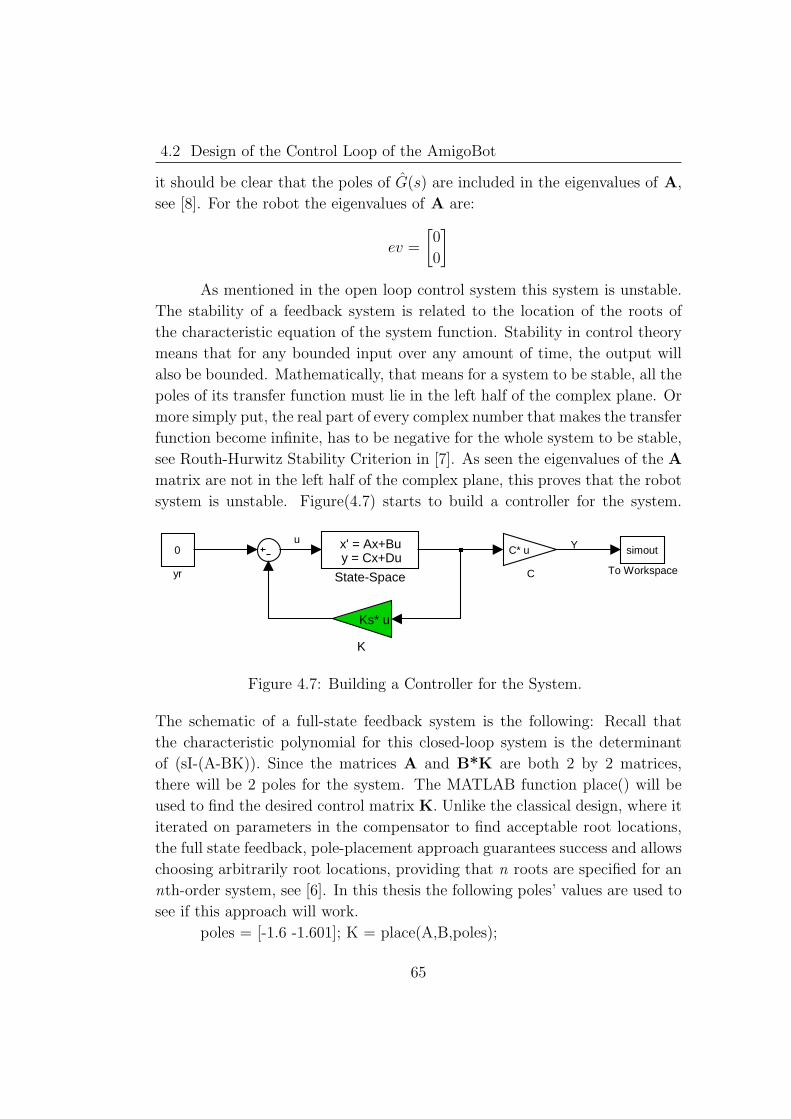
4.7 Building a Controller for the System. . . . . . . . . . . . . . 65
4.8 Linear Simulation Results. . . . . . . . . . . . . . . . . . . . 66
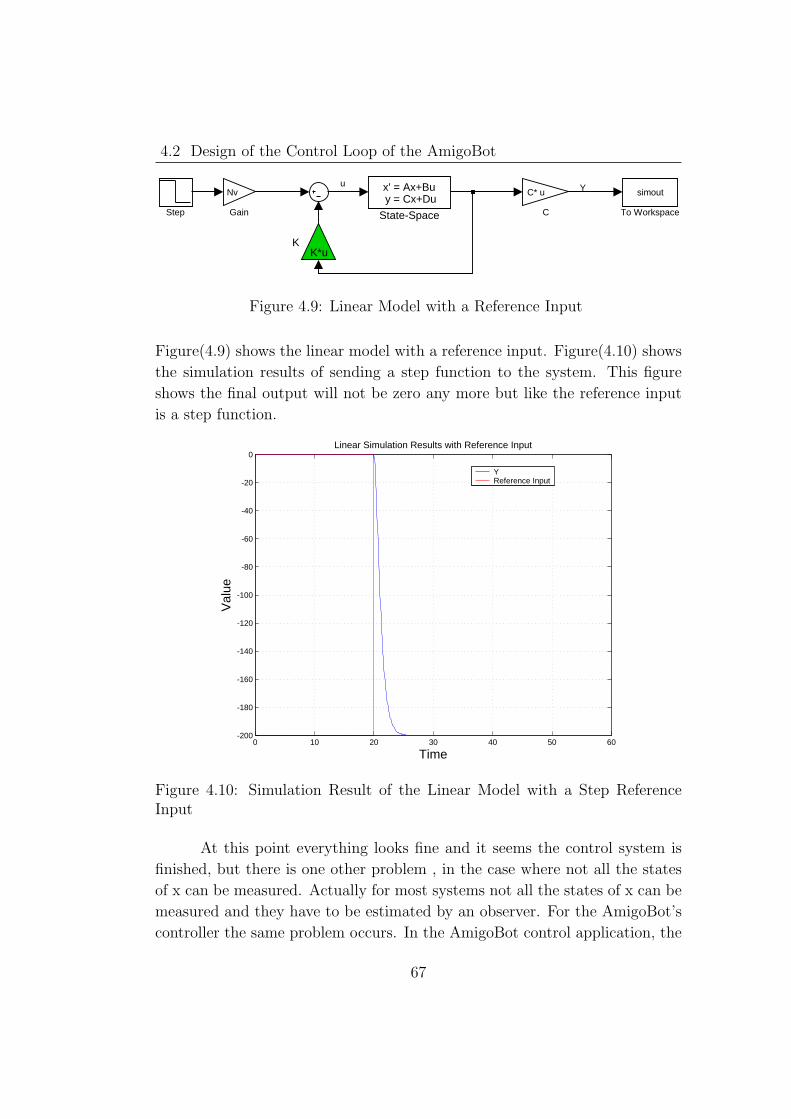
4.9 Linear Model with a Reference Input . . . . . . . . . . . . . . 67
4.10 Simulation Result of the Linear Model with a Step Reference
Input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
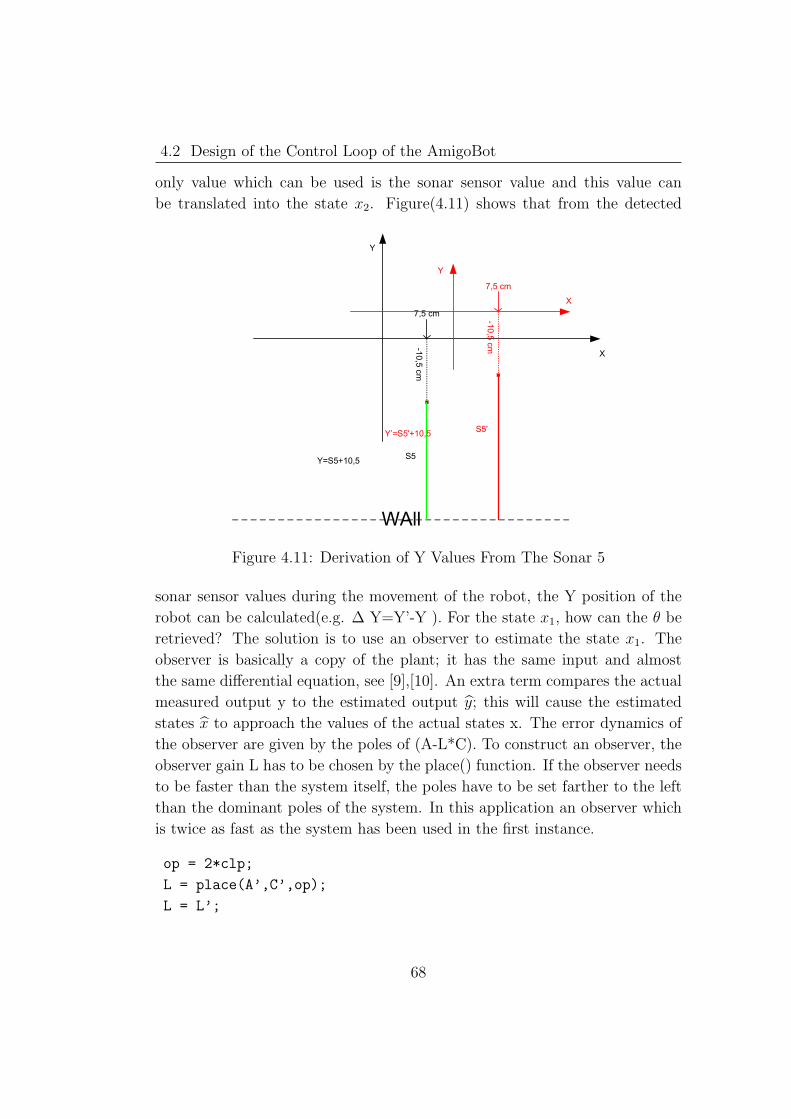
4.11 Derivation of Y Values From The Sonar 5 . . . . . . . . . . . 68
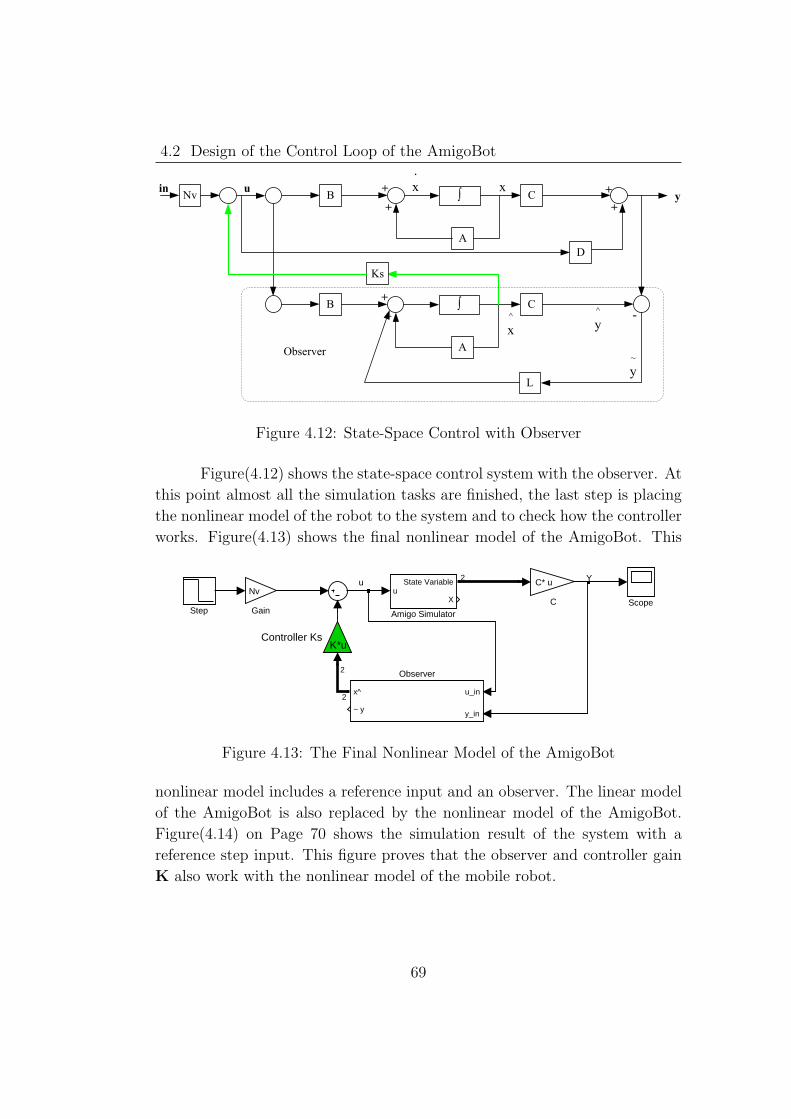
4.12 State-Space Control with Observer . . . . . . . . . . . . . . . 69
4.13 The Final Nonlinear Model of the AmigoBot . . . . . . . . . . 69
4.14 Simulation Result of Sending a Reference Step Function to the
Final Nonlinear Model of the AmigoBot . . . . . . . . . . . . 70
4.15 The Top Level of the AmigoBot’s Final Control System . . . . 70
4.16 Subsystem Observer and Controller . . . . . . . . . . . . . . . 71
4.17 Sub Subsystem Observer . . . . . . . . . . . . . . . . . . . . . 71
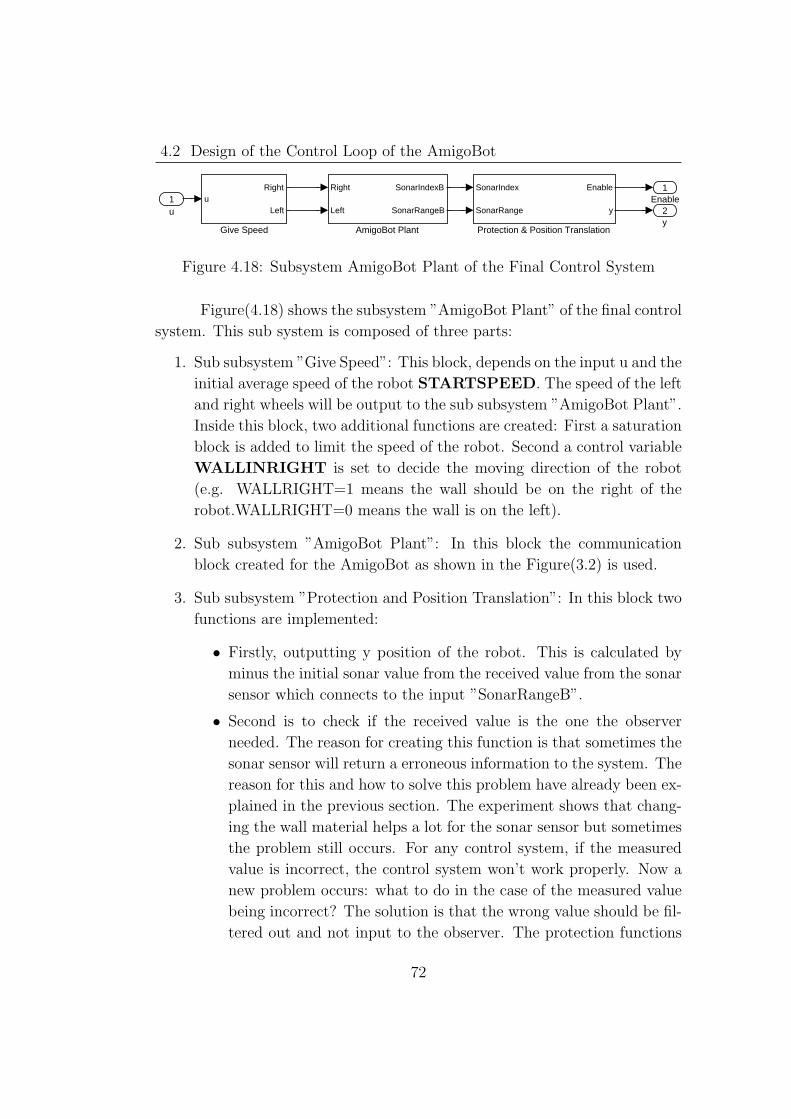
4.18 Subsystem AmigoBot Plant of the Final Control System . . . 72
ix
Page 10
LIST OF FIGURES
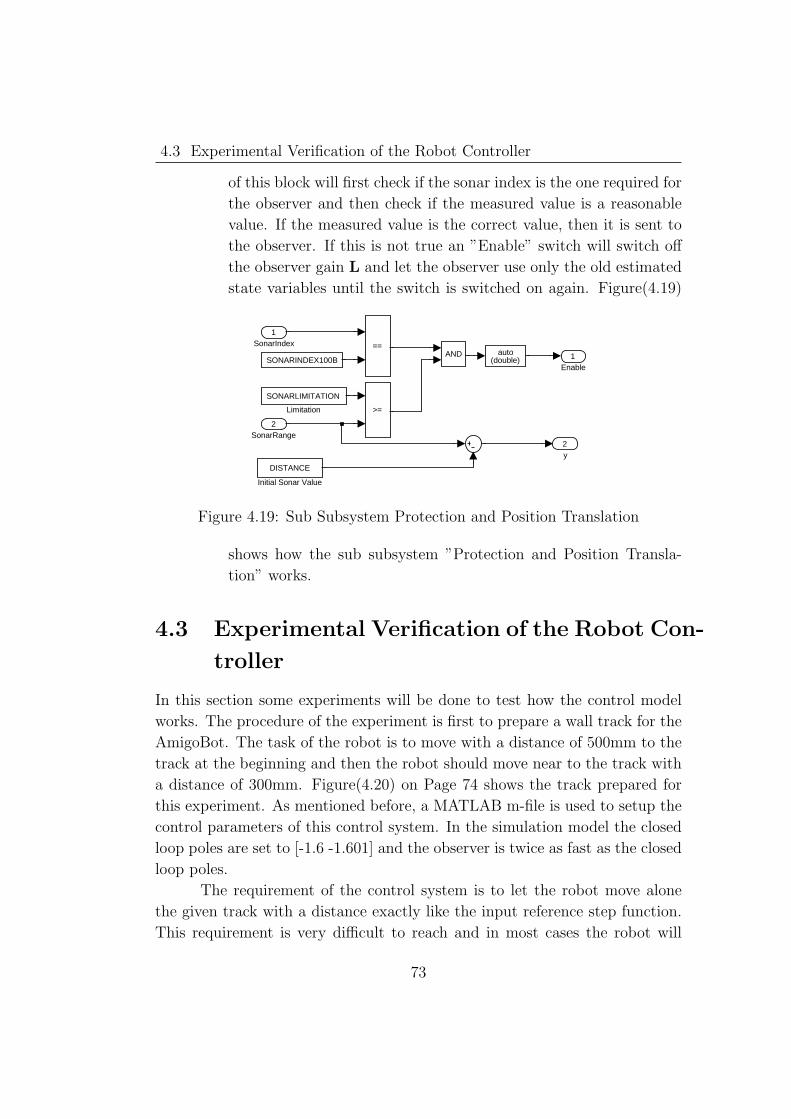
4.19 Sub Subsystem Protection and Position Translation . . . . . . 73
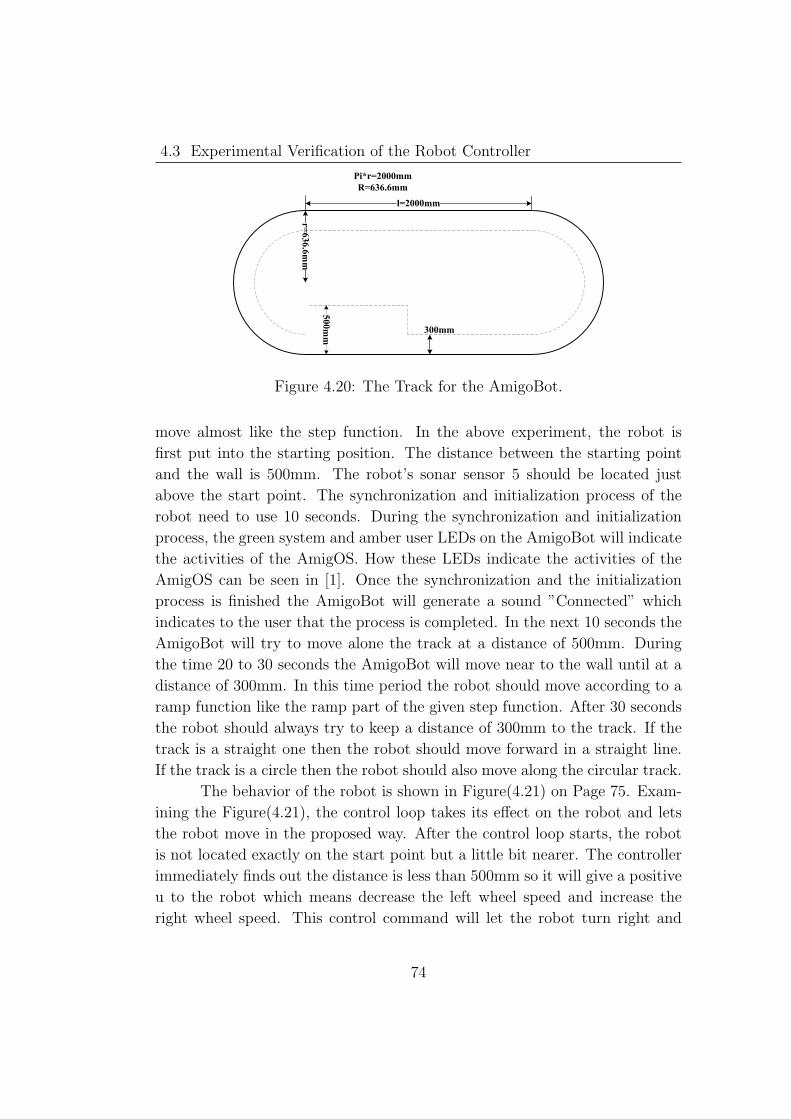
4.20 The Track for the AmigoBot. . . . . . . . . . . . . . . . . . . 74
4.21 Experiment A: The Received Sonar,Theta,U and the Given In-
put Information. . . . . . . . . . . . . . . . . . . . . . . . . . 75
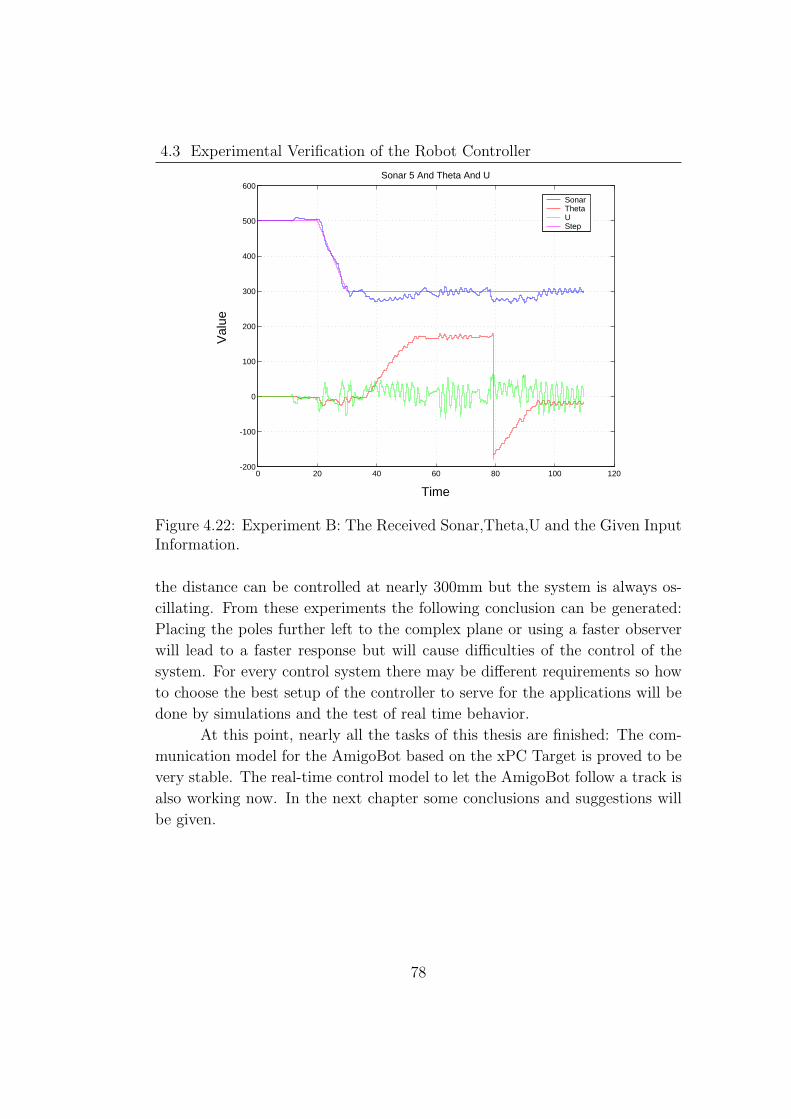
4.22 Experiment B: The Received Sonar,Theta,U and the Given In-
put Information. . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.23 Experiment C: The Received Sonar,Theta,U and the Given In-
put Information. . . . . . . . . . . . . . . . . . . . . . . . . . 79
x
Page 11
Chapter 1
Introduction
This thesis is based on a research work in the Automatic Control Laboratory
at the Department of Electrical Engineering and Computer Science of the
University of Applied Sciences Hamburg. In the laboratory some mobile robots
are used in student courses and research works. These robots have their own
software and control package. On the other hand, the software tool MATLAB
is the primary software used in the department for communication and control
because of its advantages. Therefore it is a very interesting research topic to
develop an interface to drive the robots by using MATLAB.
There are two possibilities to implement this interface. The simplest
approach is to use the basic software (ARIA) from the robot’s provider (Ac-
tivMedia). This solution is only possible in the MATLAB simulation mode
and was investigated in another thesis, see [12]. The drawbacks of this method
are possibly the inaccurate timing and the dependency of the windows oper-
ating system. Because of these drawbacks, the second possibility comes with
the idea of implementing a real-time interface for the robot. The xPC Target
from the MATLAB family provides a small and simple real time kernel to re-
alize this interface. This interface will be used later for the automatic control
laboratory.
1.1 Problem Overview
In order to find the real-time behavior of the interface, a real-time control
application for the mobile robot by using MATLAB will be included in the
thesis. This real-time control application will control a mobile robot moving
1
Page 12
1.1 Problem Overview
along a wall at a given distance. The track of the wall can be a straight one or
a curved one. The given distance can be set as a constant or as a mathematic
function (e.g. a step function).
One of the most important tasks for this thesis is to find out the func-
tionalities provided by the MATLAB for a real-time control system. MATLAB
is a high level, standard and widely spread software. It is a high-performance
language for technical computing. The Simulink, Real-Time Workshop and
xPC Target from the MATLAB family will be used in this thesis too, as they
are very powerful in building a real-time control system. The Simulink is a
software package used to model, simulate, and analyze systems whose outputs
change over time. The Real-Time Workshop is an extension of capabilities
found in Simulink and MATLAB to enable rapid prototyping of real-time
software applications on a variety of systems. The xPC Target is a solution
for prototyping, testing, and deploying real-time systems using standard PC
hardware. All these products from the MATLAB family are commonly used
to realize a real-time control application whose behavior is changed over time.
They are spread in almost every university, company and research center, so
in this thesis they are used to implement this real-time control application.
The final product of this thesis will be a Simulink block diagram running on
the xPC Target.
To realize this real-time control application a mobile robot and a real-
time environment are required for this project.
For the mobile robot the three-wheeled mobile robot AmigoBot from
ActivMedia was chosen in this application. AmigoBot is a small, 2 driven
wheels, differential drive and intelligent mobile robot. The AmigoBot drive
and sensor systems are powered and processed from a single controller, driven
by a high-performance, I/O-rich 20-MHz Hitachi H8 microprocessor. The
AmigoBot micro controller comes loaded with AmigOS operating system soft-
ware that manages all the low-level systems and electronics of the mobile robot.
It can be connected externally with RS232 serial link or wireless modem. The
AmigoBot comes standard with a single array of eight sonar sensors. The
sonar positions are fixed: one on each side, four facing forward, and two at the
rear, together providing nearly 360 degrees of range sensing. The sonar firing
rate is 20 Hz (50 milliseconds per sonar) and sensitivity ranges from 10cm (6
inches) to more than 5 meters (16 feet). The tasks of the AmigoBot in this
application are data acquisition and following the client’s control command,
2
Page 13
1.1 Problem Overview
once a connection between the client and the AmigoBot is established. The
AmigOS will send the position information of the robot back to the client and
waits for the client’s commands. The position information of the robot comes
from the feed back information of different sensors. One of the most important
pieces of feed back information is the distance from the wall. This informa-
tion is detected by one of the sonar sensors just above the right wheel. The
AmigoBot has its own communication protocol so the communication block
works on the client has to follow the communication protocol of the AmigoBot.
The xPC Target from the MATLAB is chosen to support the real-time
environment. It is an environment that uses a target PC, separate from a host
PC, for running real-time applications. This environment includes a host PC
and a target PC. The host PC is a development platform which has Visual
C++, MATLAB Simulink and Real-Time Workshop. The target PC is just a
normal PC which can be booted with an xPC boot disk. xPC Target does not
require DOS, Windows, Linux, or any another operating system on the target
PC. Instead, the target PC is booted with a boot disk that includes the highly
optimized xPC Target kernel. It is created on the host PC by setting up the
xPC Target environment properties for example the xPC Target kernel specific
for either serial or network communication. To create a target application, a
Simulink model will be created at first. xPC Target then uses the Simulink
model, Real-Time Workshop, and a third-party compiler to create the target
application on the host PC. Real-Time Workshop provides the utilities to
convert the Simulink models into C code and then with a third-party C/C++
compiler, compile the code into a real-time executable. This executable is then
converted to an image suitable for xPC Target and uploaded to the target PC.
The task of the xPC Target in this application is to design a control system
for the robot by constructing a Simulink block diagram. This block diagram
will be uploaded to the target PC from the host PC. After the running of
the application, the target PC will communicate with the AmigoBot via a
wireless modem. The block diagram on the target PC will analyze the received
information from the robot and send new commands to the robot in order to
control it.
The implementation of this application is divided into two parts. The
first part of the application is to build a communication block in a Simulink
diagram. By using this Simulink block diagram the xPC Target can commu-
nicate with the AmigoBot in real-time. Here the communication means the
3
Page 14
1.1 Problem Overview
xPC Target will establish a connection with the AmigoBot and through this
connection the application running on the target PC can receive information
from the robot and send control commands to the robot. The received infor-
mation will be sent to the control block and a new client command will be
generated. The content of the new client command depends on the result of
analyzing the received information. In this part the most important thing to
do is to establish a connection between the xPC Target and robot by following
the communication protocol of the AmigoBot. This part can be divided into
three steps:
1. The aim of the first step is to synchronize the connection and initialize
the robot. The synchronization is realized by sending and receiving some
synchronization packets. The initialization is done by sending initializa-
tion packets to the robot.
2. In the second step, the received information from the AmigoBot will be
decoded into categories.
3. The task of the third step is to send the client commands to the AmigoBot.
Problems occurring in this part are how to build the synchronization process,
how to decode the information from the robot and how to send different com-
mands to the robot. These problems will be solved by different solutions which
will be introduced during the implementation.
The second part of the application is to find a control method which
can control the robot moving along the wall with a given distance. This part
can be divided into two steps:
1. At first a mathematical description of the robot will be created and ana-
lyzed. From the mathematical view, the two driven wheeled robot can be
seen as a state-space system so the state-space control method is chosen
for this application. When using the state-space system to describe the
robot, there are only two state variables: the vertical position and the
angular position of the robot. Here the vertical and angular positions
described in a 2D plane are the y position and θ position. The horizontal
position of the robot is not of interest in this application. The two state
variables are needed by the controller to generate feed back information
to the robot. The feed back information is actually the speed at which
4
Page 15
1.2 Organization of the Thesis
the two wheels should be set. In this step the first task is to find how to
get these two state variables. The distance from the robot to the wall
is the only information which can be used in this application. It can be
converted to the y position of the robot. It is detected by one of the
sonar sensors on the robot. Anther state variable θ can’t be established
directly but it can be recovered by using an observer.
2. After the mathematical behavior of the robot is clear, the second task
in this part is to build a simulator to simulate the behavior of the robot.
By using this simulator the reasonable control parameters can be found
out to let the robot move along the wall in real time. In this application
there are two problems which affect the control system:
• The sonar’s sensitivity is influenced by the robot’s position and
the material of the wall. The sonar sensor uses an ultrasonic wave
which reflects back from the wall to measure the distance from the
wall. If the sonar sensor has a large angle with the wall then there
may be no waves reflected back to the sensor which will result in a
wrong feed back information. This problem will be solved by using
a better material which can reflect the ultrasonic waves to every
direction. The details of the solution will be introduced later.
• The sonar value will only be refreshed every 400 milliseconds by
default. As the control block used in this application is a feed
back control system, the information coming from the robot is very
important. A feed back rate of 400 milliseconds is not sufficient. To
solve this problem a new sonar polling sequence is set to let only
one sonar sensor working all the time. This will lead the sonar value
to be refreshed every 100 milliseconds. How to realize this will be
explained in the following sections.
In the following chapters, how to realize this application and solutions to the
problems will be explained in detail.
1.2 Organization of the Thesis
This thesis is broken up into parts according to the main steps taken in the
realization of the real-time control system of a mobile robot: The next four
5
Page 16
1.2 Organization of the Thesis
chapters detail the design process, the hardware, the software and the resulting
problems.
• Chapter 2 outlines the design issue of the communication block of this
application. The design issue includes which hardware and software
are used in this project, and reasons for them. The interface of the
communication block.
• Chapter 3 starts with the implementation of the communication block.
In this chapter lots of experiments are used to analyze the behavior
of the AmigoBot. By working with these experiments some changes are
added to the project design which is mentioned in Chapter 2. During the
implementation some new problems and the problems listed in Chapter
2 are solved by the final model. In the last part of Chapter 3 some tests
are used to demonstrate how the communication block works.
• Chapter 4 opens with the design of the control block. The mathematical
background of this control system will be given in the beginning of the
chapter. The simulation of the control block and the main factors which
will influence the control system will be shown too. At the end of this
chapter the implementation of the control system with some experiments
will be introduced.
• Chapter 5 summarizes the contributions of this thesis and poses sugges-
tions and goals for future work.
• The appendices to this thesis give detailed information on specific topics
related to the work presented. Appendix A is the table AmigOS Com-
mand Set. Appendices B and C are some initial MATLAB m file used
in the project.
6
Page 17
Chapter 2
Design of the AmigoBot’s
Communication Interface
In this section the design procedure of the communication model for the real-
time control system will be introduced. The design procedure starts from
choosing the software and hardware. After this the interface of the commu-
nication model will be given. In the following sections more details about
the design procedure will be explained. As mentioned in the introduction,
the hardware used in this application is the AmigoBot and xPCTarget(Host
and Target PC). The software used in this application is the AmigOS and the
MATLAB xPC Target software set.
2.1 The xPC Target
The title of this thesis shows this is a real-time control application. Currently,
most control applications are based on PC control and the use of the Windows
operating system. In this application the Windows operating system will only
be used on the host PC. The reason is that it is not an exact real-time operating
system and is expensive. For educational purpose and real-time requirements
of this application, the xPC Target is used to realize this control task. The
xPC Target is a solution for prototyping, testing, and deploying real-time
systems using standard PC hardware. It is an environment which uses a target
PC, separate from a host PC, for running real-time applications. Changing
parameters in the target application while it is running in real time, and
checking the results by viewing signal data, are two important prototyping
7
Page 18
2.1 The xPC Target
tasks. xPC Target includes a command-line and graphical user interfaces to
complete these tasks.
2.1.1 Host and Target PC
The working procedure of the xPC Target is first to develop a real-time ap-
plication on the host PC. This application is built by creating a MATLAB
model file which uses the Simulink libraries. The model file will be compiled
as a real-time executable and then uploaded to the target PC. The target PC
will provide a real-time environment for the application. The application can
be started or stopped from the target PC or the host PC. Both the target and
host PC can control the application when it is running. For example the pa-
rameters of the application can be changed from the host or target PC during
the run time. The xPC Target hardware requires a host PC and a target PC.
The target PC only needs to have the I/O boards supported by xPC Target
and a boot disk. More details about the software on the host PC and target
PC and how they work together will be introduced in the following sections.
2.1.2 xPC Target Software Set
xPC Target is a PC-compatible product which is installed on a host computer
running a Microsoft Windows operating system. xPC Target requires the
following products from MathWorks:
• MATLAB – Control and interaction with the xPC Target software en-
vironment and target application using a command-line interface.
• Simulink – Model dynamic physical systems and controllers using block
diagrams.
• Real-Time Workshop – Convert Simulink blocks and Stateflow charts
into C code.
• C Compiler – Use a third-party C compiler and Real-Time Workshop to
build a target application. The C compiler can be a Microsoft Visual
C/C++ compiler (version 5.0, 6.0, or 7.0) or a Watcom C/C++ compiler
(version 10.6 or 11.0) or other supported compilers.
8
Page 19
2.1 The xPC Target
• xPC Target Embedded Option – deploys stand-alone target applications
and custom GUI applications that communicate with the target appli-
cation. Note that custom GUI applications can be created without the
xPC Target Embedded Options.
The MATLAB ,Simulink and C Compiler are common softwares used in every
university, they will not be detailed in this thesis. The xPC Target Embed-
ded Option will not be used in this application. The only thing need to be
mentioned is the Real-Time Workshop and MATLAB S-Functions (system-
functions).
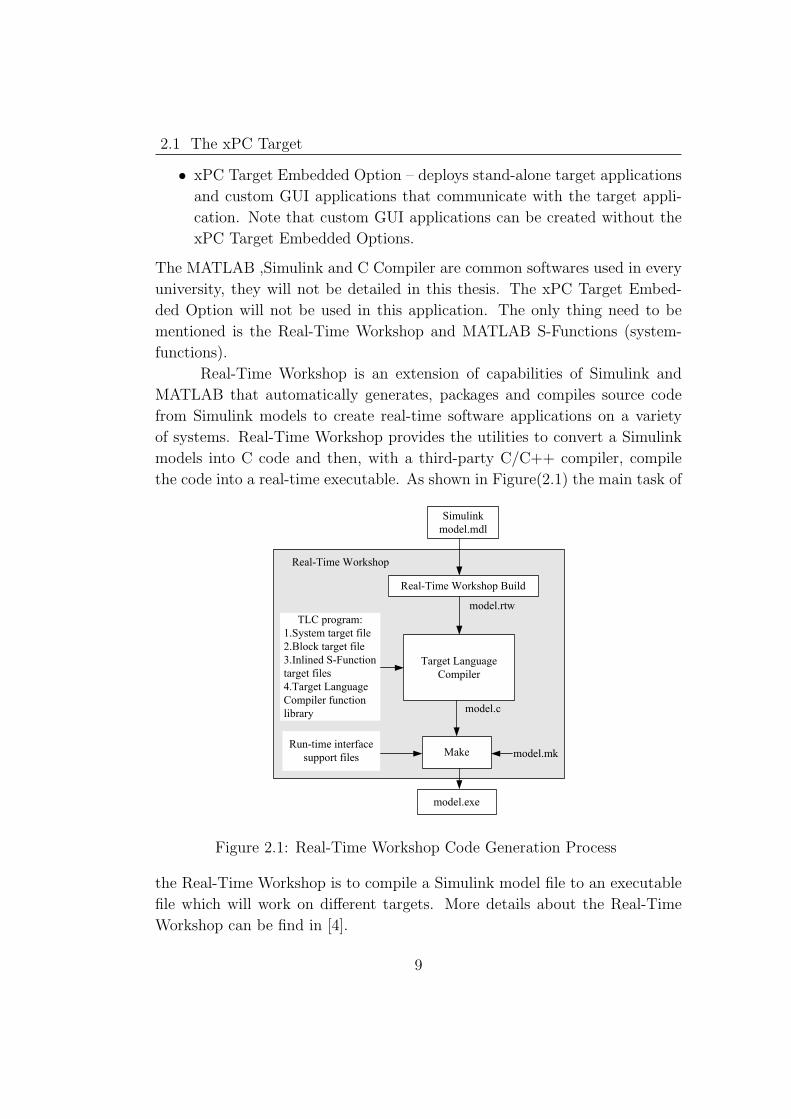
Real-Time Workshop is an extension of capabilities of Simulink and
MATLAB that automatically generates, packages and compiles source code
from Simulink models to create real-time software applications on a variety
of systems. Real-Time Workshop provides the utilities to convert a Simulink
models into C code and then, with a third-party C/C++ compiler, compile
the code into a real-time executable. As shown in Figure(2.1) the main task of
Simulink
model.mdl
Real-Time Workshop Build
Target Language
Compiler
Make
model.exe
Real-Time Workshop
model.rtw
TLC program:
1.System target file
2.Block target file
3.Inlined S-Function
target files
4.Target Language
Compiler function
library
Run-time interface
support files
model.c
model.mk
Figure 2.1: Real-Time Workshop Code Generation Process
the Real-Time Workshop is to compile a Simulink model file to an executable
file which will work on different targets. More details about the Real-Time
Workshop can be find in [4].
9
Page 20
2.1 The xPC Target
S-Functions (system-functions) provide a powerful mechanism for ex-
tending the capabilities of Simulink. The most common use of S-Functions is
to create custom Simulink blocks. It can be used for a variety of applications,
including:
• Adding new general purpose blocks to Simulink
• Adding blocks that represent hardware device drivers
• Incorporating existing C code into a simulation
• Describing a system as a set of mathematical equations
• Using graphical animations
An advantage of using S-Functions is that it can be used to build a general
purpose block that can be used many times in a model, varying parameters
with each instance of the block. In this application the S-Functions work
together with the Real-Time Workshop to solve various kinds of problems.
These problems include:
• Extending the set of algorithms (blocks) provided by Simulink and Real-
Time Workshop
• Interfacing existing (hand-written) C-code with Simulink and Real-Time
Workshop
• Generating highly optimized C-code for embedded systems
The explanation of S-Function above means that the S-Function is a tool which
allows let’s the developer to create their own MATLAB tool block for their
special applications. More details about the S-Function and why they are used
in this application will be introduced in Chapter 3.
2.1.3 Downloading A Model to the Target PC
In this section a simple introduction about how the xPC Target works will be
given. The first step is to build a connection between the host PC and the
target PC. There are two ways to connect them: one is the serial communi-
cation(e.g serial RS232) and the other is using network communication. Here
the network communication is used to connect the target and the host PC
because it has two advantages:
10
Page 21
2.1 The xPC Target
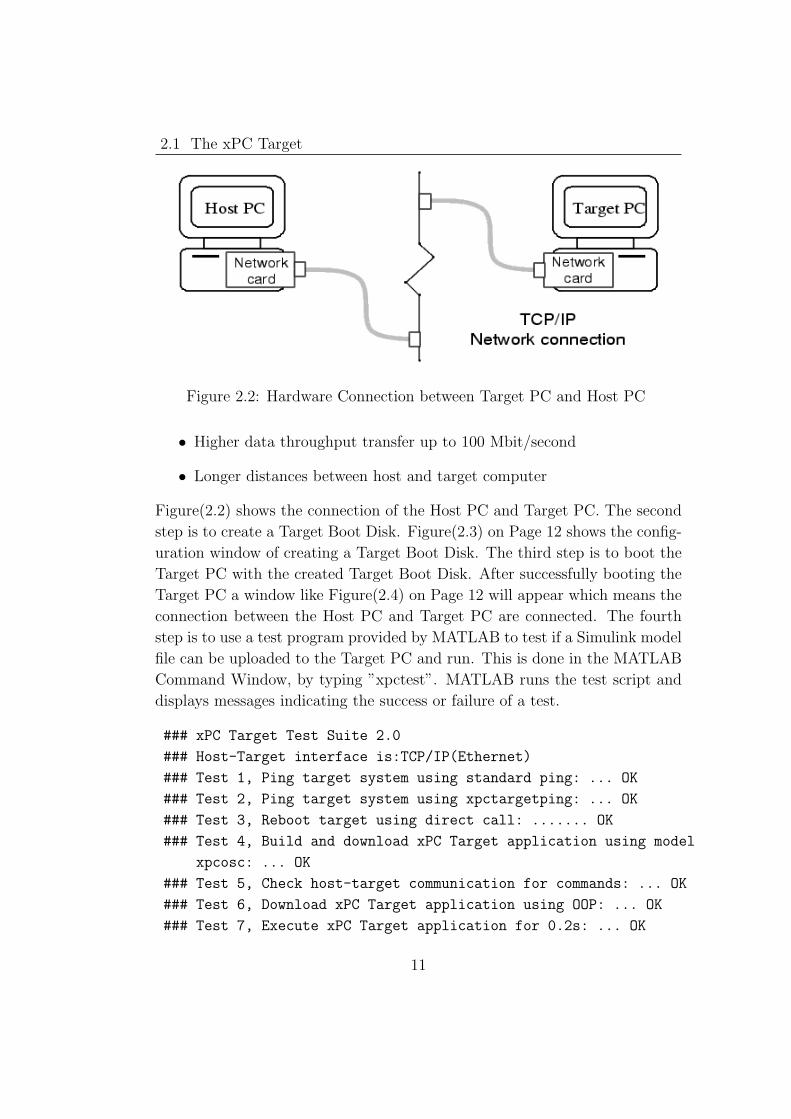
Figure 2.2: Hardware Connection between Target PC and Host PC
• Higher data throughput transfer up to 100 Mbit/second
• Longer distances between host and target computer
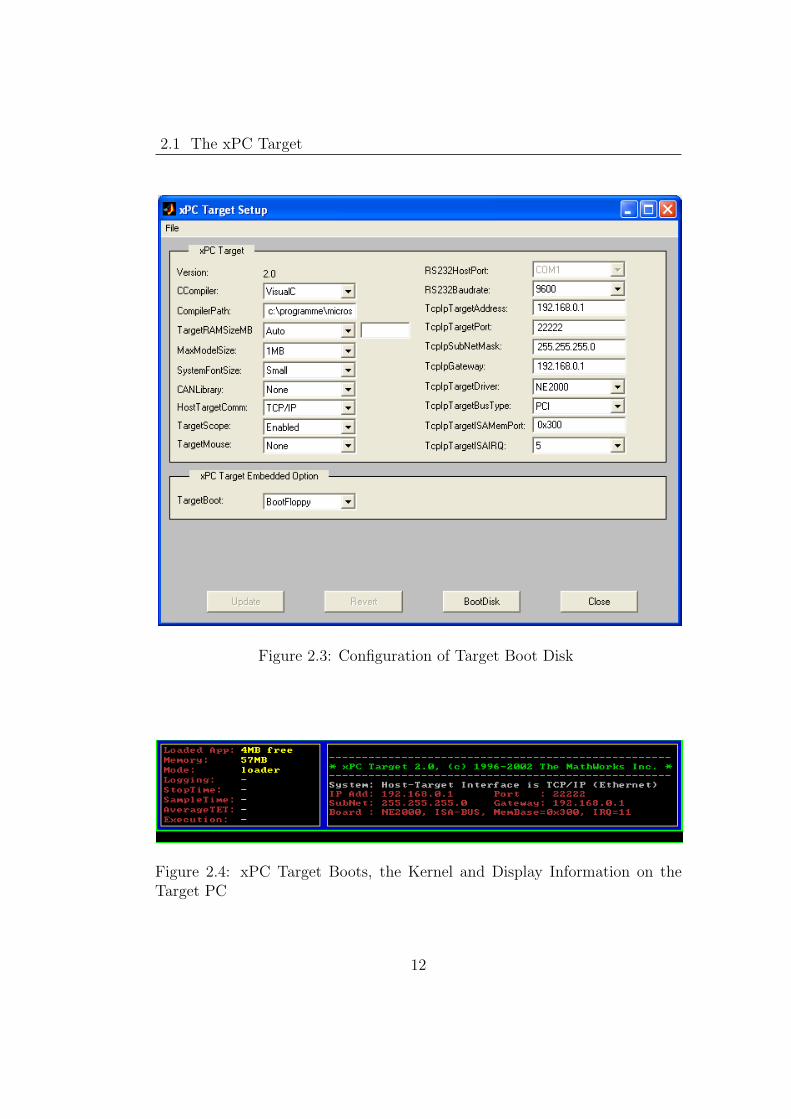
Figure(2.2) shows the connection of the Host PC and Target PC. The second
step is to create a Target Boot Disk. Figure(2.3) on Page 12 shows the config-
uration window of creating a Target Boot Disk. The third step is to boot the
Target PC with the created Target Boot Disk. After successfully booting the
Target PC a window like Figure(2.4) on Page 12 will appear which means the
connection between the Host PC and Target PC are connected. The fourth
step is to use a test program provided by MATLAB to test if a Simulink model
file can be uploaded to the Target PC and run. This is done in the MATLAB
Command Window, by typing ”xpctest”. MATLAB runs the test script and
displays messages indicating the success or failure of a test.
### xPC Target Test Suite 2.0
### Host-Target interface is:TCP/IP(Ethernet)
### Test 1, Ping target system using standard ping: ... OK
### Test 2, Ping target system using xpctargetping: ... OK
### Test 3, Reboot target using direct call: ....... OK
### Test 4, Build and download xPC Target application using model
xpcosc: ... OK
### Test 5, Check host-target communication for commands: ... OK
### Test 6, Download xPC Target application using OOP: ... OK
### Test 7, Execute xPC Target application for 0.2s: ... OK
11
Page 22
2.1 The xPC Target
Figure 2.3: Configuration of Target Boot Disk
Figure 2.4: xPC Target Boots, the Kernel and Display Information on theTarget PC
12
Page 23
2.2 The AmigoBot
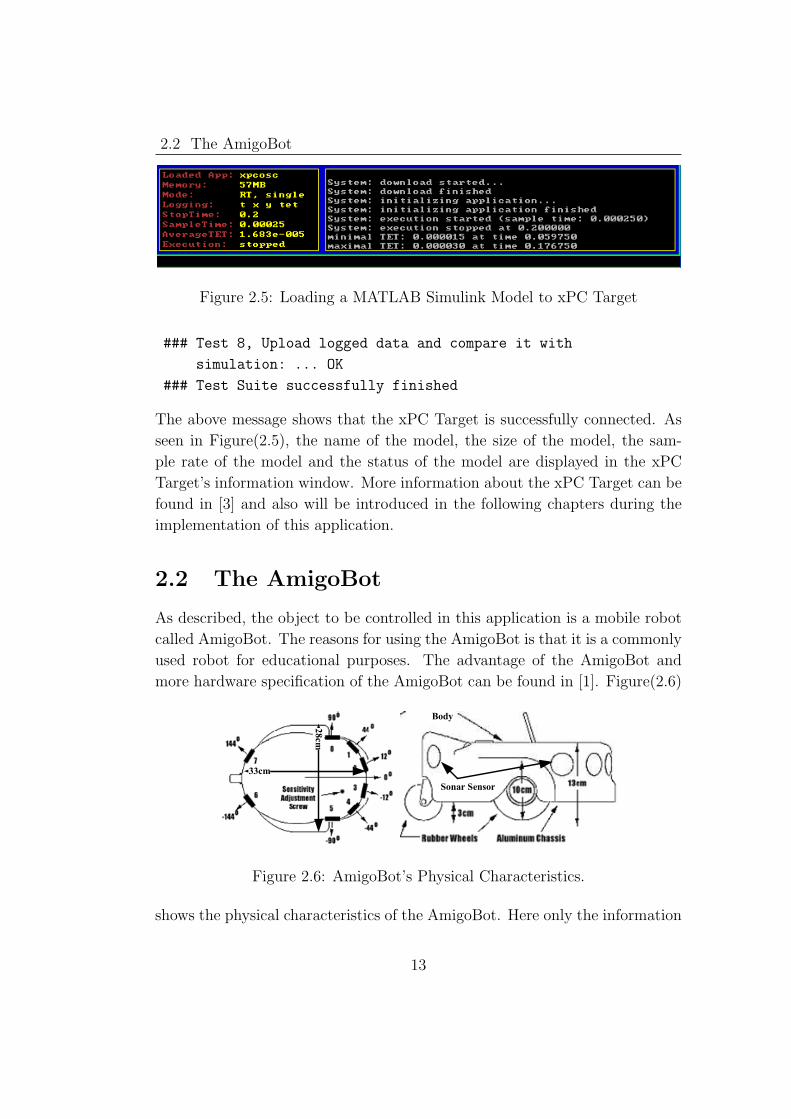
Figure 2.5: Loading a MATLAB Simulink Model to xPC Target
### Test 8, Upload logged data and compare it with
simulation: ... OK
### Test Suite successfully finished
The above message shows that the xPC Target is successfully connected. As
seen in Figure(2.5), the name of the model, the size of the model, the sam-
ple rate of the model and the status of the model are displayed in the xPC
Target’s information window. More information about the xPC Target can be
found in [3] and also will be introduced in the following chapters during the
implementation of this application.
2.2 The AmigoBot
As described, the object to be controlled in this application is a mobile robot
called AmigoBot. The reasons for using the AmigoBot is that it is a commonly
used robot for educational purposes. The advantage of the AmigoBot and
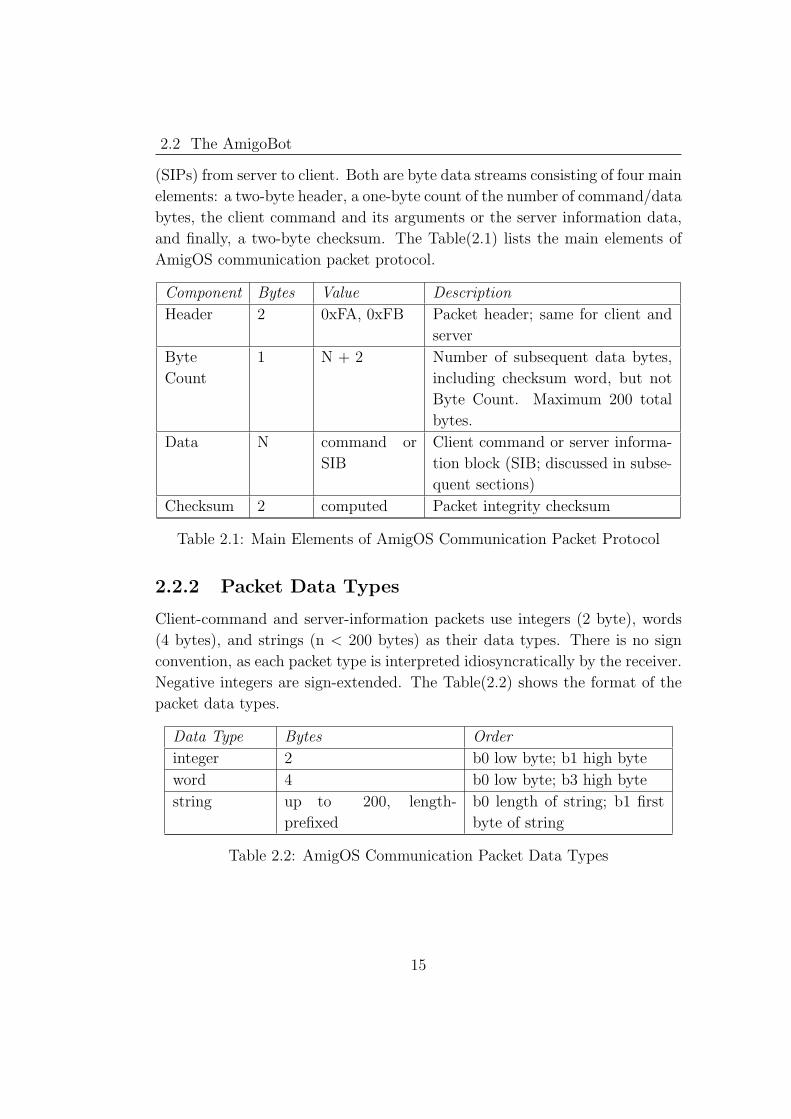
more hardware specification of the AmigoBot can be found in [1]. Figure(2.6)
Sonar Sensor
28cm
33cm
Body
Figure 2.6: AmigoBot’s Physical Characteristics.
shows the physical characteristics of the AmigoBot. Here only the information
13
Page 24
2.2 The AmigoBot
Client Application
Server Information Commands
Communication Packets
Velocity &Angle
ControlsPosition
Integration
Sonar & I/O
Schedules
PWM
Control
Encoder
Counting
Sonar
Ranging
I/O
Control
Server Informaiotn
Robot Specific Functions
Figure 2.7: AmigoBot’s Client-server Architecture
about the AmigoBot’s communication protocol and the sonar sensors will be
explained. The AmigoBot uses an intelligent client/server control architecture
developed by Dr. Kurt Konolige. In the model, the server works to manage all
the low-level details of the mobile robot’s systems. These include operating the
motors, firing the sonar, collecting sonar and motor encoder data, and so on.
The client application sends commands to the server and receives the returned
report from the server. Figure(2.7) shows the client-server architecture of the
AmigoBot. As described in the introduction the whole application is divided
into two steps: the communication model and the control model. Before
starting the design of the communication model and the control model, the
communication with AmigoBot via the AmigOS client-server interface will be
described.
2.2.1 Communication Packet Protocol
AmigOS communicates with a client application by using special packet proto-
cols: command packets from client to server, and Server Information Packets
14
Page 25
2.2 The AmigoBot
(SIPs) from server to client. Both are byte data streams consisting of four main
elements: a two-byte header, a one-byte count of the number of command/data
bytes, the client command and its arguments or the server information data,
and finally, a two-byte checksum. The Table(2.1) lists the main elements of
AmigOS communication packet protocol.
Component Bytes Value Description
Header 2 0xFA, 0xFB Packet header; same for client and
server
Byte
Count
1 N + 2 Number of subsequent data bytes,
including checksum word, but not
Byte Count. Maximum 200 total
bytes.
Data N command or
SIB
Client command or server informa-
tion block (SIB; discussed in subse-
quent sections)
Checksum 2 computed Packet integrity checksum
Table 2.1: Main Elements of AmigOS Communication Packet Protocol
2.2.2 Packet Data Types
Client-command and server-information packets use integers (2 byte), words
(4 bytes), and strings (n < 200 bytes) as their data types. There is no sign
convention, as each packet type is interpreted idiosyncratically by the receiver.
Negative integers are sign-extended. The Table(2.2) shows the format of the
packet data types.
Data Type Bytes Order
integer 2 b0 low byte; b1 high byte
word 4 b0 low byte; b3 high byte
string up to 200, length-
prefixed
b0 length of string; b1 first
byte of string
Table 2.2: AmigOS Communication Packet Data Types
15
Page 26
2.2 The AmigoBot
2.2.3 Packet Checksum
The checksum is used in almost every communication to check if there is
disturbance. The AmigOS communication protocol contains the checksum
too. It is calculated by successively adding data byte pairs (high byte first) to
the running checksum (initially zero), disregarding sign and overflow. If there
is an odd number of data bytes, the last byte is XORed to the low-order byte
of the checksum. Using the MATLAB existing tool block to calculate this
checksum for the robot is too complicated. An S-Function will be created to
calculate the checksum of the received block and compare it with the received
checksum to see if the received packet is wrong.
2.2.4 Packet Errors
Currently, AmigOS ignores a client command packet whose byte count exceeds
200 or has an erroneous checksum. The client should similarly ignore erroneous
server information packets. AmigOS does not acknowledge receipt of a com-
mand packet nor does it have any facility to handle client acknowledgment of
a server information packet.
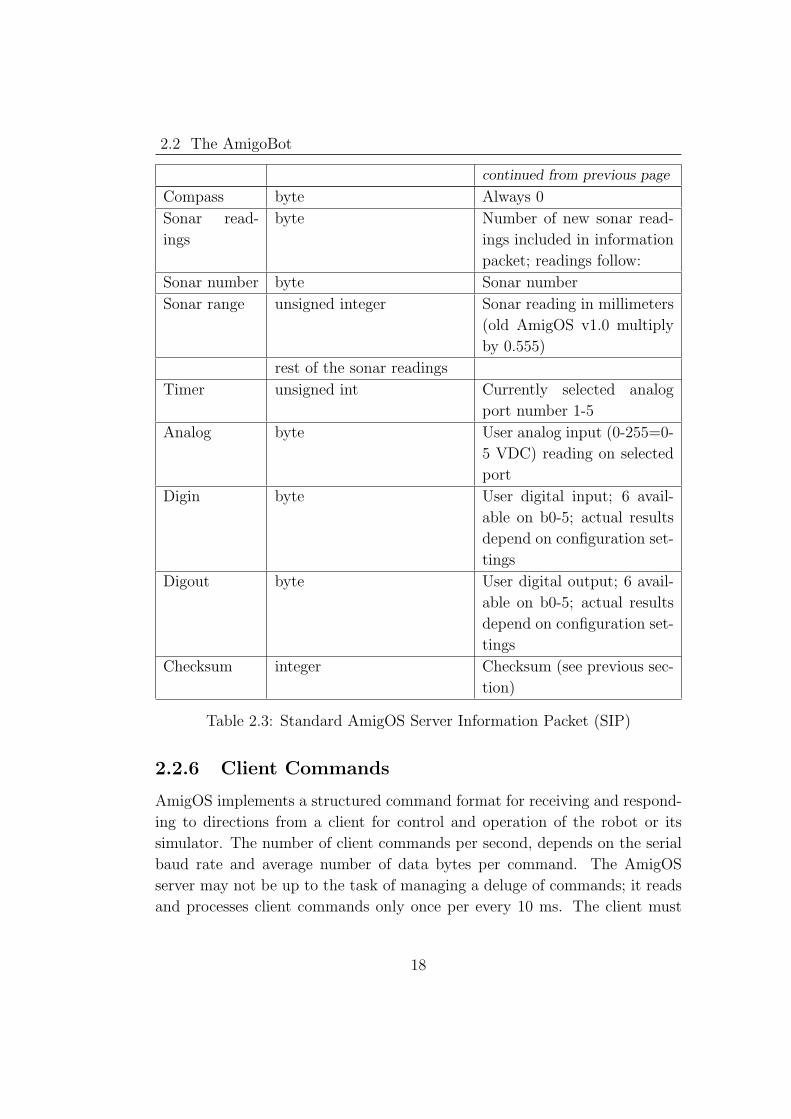
2.2.5 Server Information Packets
Once connected, AmigOS automatically sends a packet of information back
to the client every 100 milliseconds, depending on the infoCycle setting in the
robot FLASH parameters. The standard AmigOS Server Information Packet
(SIP) informs the client about a number of the robot’s operating parameters
and readings, using the orders and data types shown in the Table(2.1) on
Page 15. AmigOS also supports several additional server information packet
types, including an alternative server information packet. Table(2.3) shows
the list of the format of SIP.
Name Data Type Description
Header integer Exactly 0xFA, 0xFB
Byte Count byte Number of data bytes + 2 <
201 (0xC9) max.
continued on next page
16
Page 27
2.2 The AmigoBot
continued from previous page
Status byte = 0x3S; where S = Motors status
sfSTATUSSTOPPED (2) Motors moving
sfSTATUSMOVING (3) Motors stopped
Xpos unsigned integer (15 ls-bits) Wheel-encoder integrated
coordinates; platform-
dependent units; multiply
by 0.5083 to convert to
millimeters
Ypos unsigned integer (15 ls-bits)
Th pos signed integer Orientation in platform-
dependent units multiply by
0.001534 for degrees.
L vel signed integer Wheel velocities (respective
Left and Right) in platform-
dependent units;
R vel signed integer multiply by 0.6154 to con-
vert to mm/sec
Battery byte Battery charge times 10
volts
Bumpers integer Motor stall indicators. Bit 0
of the lsbyte is the left wheel
stall indicator = 1 if stalled;
bit 0 of the msbyte is the
right wheel stall.
Control signed integer Setpoint of the server’s an-
gular position multiply by
0.001534 for degrees
PTU unsigned integer bit 0 reflects motors engaged
state (1 of engaged) and bit
1 reflects the sonar toggle (1
if on)
continued on next page
17
Page 28
2.2 The AmigoBot
continued from previous page
Compass byte Always 0
Sonar read-
ings
byte Number of new sonar read-
ings included in information
packet; readings follow:
Sonar number byte Sonar number
Sonar range unsigned integer Sonar reading in millimeters
(old AmigOS v1.0 multiply
by 0.555)
rest of the sonar readings
Timer unsigned int Currently selected analog
port number 1-5
Analog byte User analog input (0-255=0-
5 VDC) reading on selected
port
Digin byte User digital input; 6 avail-
able on b0-5; actual results
depend on configuration set-
tings
Digout byte User digital output; 6 avail-
able on b0-5; actual results
depend on configuration set-
tings
Checksum integer Checksum (see previous sec-
tion)
Table 2.3: Standard AmigOS Server Information Packet (SIP)
2.2.6 Client Commands
AmigOS implements a structured command format for receiving and respond-
ing to directions from a client for control and operation of the robot or its
simulator. The number of client commands per second, depends on the serial
baud rate and average number of data bytes per command. The AmigOS
server may not be up to the task of managing a deluge of commands; it reads
and processes client commands only once per every 10 ms. The client must
18
Page 29
2.2 The AmigoBot
send a command at least once every two seconds or so;otherwise, the com-
munication watchdog server will stop the robot’s onboard drives. Table(2.4)
shows the format of the client commands.
Component Bytes Value Description
Header 2 0xFA, 0xFB Packet header; same for client
and server
Byte Count 1 N + 2 Number of subsequent command
bytes plus checksum, not includ-
ing Byte Count. Maximum of
200 bytes.
Command
Number
1 0 - 255 Client command number;
Argument
Type (com-
mand depen-
dent)
1 0x3B or 0x1B
or 0x2B
Required data type of com-
mand argument: positive integer
(sfARGINT), negative integer or
absolute value (sfARGNINT), or
string (sfARGSTR)
Argument
(command
dependent)
n data Command argument; integer or
string
Checksum 2 computed Packet integrity checksum
Table 2.4: AmigOS Client Command Packet
The AmigOS command is comprised of a one-byte command number option-
ally followed by, if required by the command, a one-byte description of the
argument type and the two (integers) or more (strings) byte argument value.
The number of client commands per second, depends on the Control serial
baud rate, average number of data bytes per command, synchronicity of the
communication link, and so on. AmigOS command processor runs on a ten
millisecond interrupt cycle, but the server response speed depends on the com-
mand. Typically, client commands are limited to a maximum of one every 20
milliseconds.
19
Page 30
2.3 Connection between the xPC Target and AmigoBot
2.2.7 Client Command Argument Types
There are three different types of AmigOS client-command arguments: pos-
itive integers two bytes long, negative integers two bytes long, and NULL-
terminated strings consisting of as many as 196 characters. The byte order is
least-significant byte first. Negative integers are transmitted as their absolute
value, unlike information packets, which use sign extension for negative inte-
gers; see below. The argument is an integer, a string, or nothing, depending
on the command.
2.3 Connection between the xPC Target and
AmigoBot
The AmigoBot AmigOS servers require a serial communication link to a client.
The serial link may be:
• A tether (AmigoLEASH) from the Control serial connector on the top
of AmigoBot to a base station computer
• An optional radio modem pair—one inside AmigoBot and its companion
connected to the serial port of the client PC.
Target PC Radio ModemRS232 AmigoBot With aRadio ModemFigure 2.8: Hardware Connection between Target PC and AmigoBot
In this project the radio modem link is chosen, because the radio modem is
more flexible than the serial link. As shown in Figure(2.8), the connection
between the Target PC and AmigoBot.
20
Page 31
2.4 The AmigoBot Communication Block
2.4 The AmigoBot Communication Block
After the above introduction the next step is to build an interface for the
AmigoBot communication block. The Figure(2.9) shows the AmigoBot com-
AmigoBot Communication
Block
Check Sum
LeftWheel
RightWheel
Theta
Y
X
SonarReading
SonarIndex
SonarRange
Start
Left Wheel Speed
Right Wheel Speed
Figure 2.9: The AmigoBot Communication Block
munication block. This communication block is prepared for building a control
system of the robot. For the robot control system the main control variables
are the speeds of the wheels so the communication block must have the speed
inputs. As introduced previously the state variable of the state-space system
comes from the sonar sensor so the outputs must have sonar sensor value.
In order to help the user to find more useful information, more detailed po-
sitional information will be output too. This interface has three inputs and
several outputs. The input ”Start” is used to control the start and stop of the
application. The inputs ”Left Wheel Speed” and ”Right Wheel Speed” are
used to set the wheel speeds of the robot. The outputs of the communication
block are used to output the decoded information from the received SIP(e.g
the position information of the robot).
21
Page 32
Chapter 3
Implementation of the
AmigoBot Communication
System
The first step to work with the AmigoBot is to establish a connection with the
AmigoBot. There are lots of different communication interfaces which can be
used for the AmigoBot like the Aria software or self built interfaces. In this
project the MATLAB Real-Time Work Shop and xPC Target are chosen as
the development tools and the communication will be realized by a MATLAB
model file. Before exerting any control, a client application must first establish
a connection to the AmigoBot server. Over that established communication
link, the client then sends commands to and receives operating information
from the server. In the following parts, details of this model file are given.
3.1 Analyzing the Synchronization and Ini-
tialization Process
3.1.1 Analyzing the Synchronization Process
When first started, the AmigoBot is in a ”wait” state; AmigOS listens for
communication packets over its designated port. To establish a connection, the
client application must send a series of three synchronization packets through
the host’s communication port: SYNC0, SYNC1 and SYNC2. At the same
22
Page 33
3.1 Analyzing the Synchronization and Initialization Process
time the client has to retrieve the server responses.
The synchronization sequence of bytes are (in hexadecimal notation):
SYNC0: 0xFA, 0xFB, 0x03, 0x00, 0x00, 0x00
SYNC1: 0xFA, 0xFB, 0x03, 0x01, 0x00, 0x01
SYNC2: 0xFA, 0xFB, 0x03, 0x02, 0x00, 0x02
AmigOS responds to each client command, forming a succession of identical
synchronization packets. The client should listen for the returned packets
and only issue the next synchronization packet after it has received the echo.
In order to test the behavior of the AmigoBot synchronization procedure an
experiment is done with a software called LookRS232 which can send and
receive the data from the COM port by using the RS232 connections.
Time(s) Sent Data (hex) Received Data (hex)
0023.704 FA FB 03 00 00 00
0023.782 FA FB 03 00 00 00
0024.047 FA FB 03 01 00 01
0024.125 FA FB 03 01 00 01
0024.360 FA FB 03 02 00 02
0024.438 FA FB 1D 02 48 61 6D 62
0024.454 75 72 67 5F 33 33 31 00
0024.469 50 69 6F 6E 65 65 72 00
0024.469 41 6D 69 67 6F 00 DD A4
0024.657 FA FB 03 01 00 01
0024.829 FA FB 21 32 00 00 00 00
0024.829 00 00 00 00 00 00 6E 00
0024.844 00 00 00 02 00 00 02 00
0024.844 50 03 01 20 0B 01 00 00
0024.860 00 00 58 CC
0024.922 FA FB 21 32 00 00 00 00
0024.938 00 00 00 00 00 00 6D 00
0024.938 00 00 00 02 00 00 02 02
0024.954 D5 12 03 35 03 01 00 00
continued on next page
23
Page 34
3.1 Analyzing the Synchronization and Initialization Process
continued from previous page
0024.954 00 00 7F 4A
0025.032 FA FB 21 32 00 00 00 00
0025.032 00 00 00 00 00 00 6D 00
0025.047 00 00 00 02 00 00 02 04
0025.047 8F 06 05 DC 05 01 00 00
0025.063 00 00 1C 08
Table 3.1: Synchronization Test Case 1
Time(s) Sent Data (hex) Received Data (hex)
0023.704 FA FB 03 00 00 00
0023.782 FA FB 00
0024.047 FA FB 03 01 00 01
0024.125 FA FB 03 01 00 01
0024.360 FA FB 03 02 00 02
0024.438 FA FB 1D 02 48 61 6D 62
0024.454 75 72 67 5F 33 33 31 00
0024.469 50 69 6F 6E 65 65 72 00
0024.469 41 6D 69 67 6F 00 DD A4
Table 3.2: Synchronization Test Case 2
Time(s) Sent Data (hex) Received Data (hex)
0006.880 6D 69 67 6F 00 DD A4
0006.890 FA FB 03 00 00 00
0006.890 FA FB 03 FF 00 FF
0006.906 FA FB 03 00 00 00
0006.906 FA FB 03 00 00 00
0006.922 FA FB 03 01 00 01
0006.922 FA FB 03 01 00 01
0007.222 FA FB 03 02 00 02
0007.222 FA FB 03 02 00 02
Table 3.3: Synchronization Test Case 3
24
Page 35
3.1 Analyzing the Synchronization and Initialization Process
Time(s) Sent Data (hex) Received Data (hex)
0006.890 FA FB 03 00 00 00
0006.890 FA FB 03 01 00 01
0006.906 FA FB 03 02 00 02
0006.906 FA FB 03 01 00 01
0006.922 FA FB 06 04 3B 01 00 05 3B
0006.922 FA FB 03 00 00 00
0006.922 FA FB 03 02 00 02
0007.000 FA FB 03 00 00 00 FA FB
0007.000 03 FF 00 FF FA FB 03 FF
0007.015 00 FF FA FB 03 FF 00 FF
0007.031 FA FB 03 FF 00 FF
Table 3.4: Synchronization Test Case 4
The above four tables demonstrate four different cases of the synchro-
nization process. In the following section these four cases will be explained.
The Table(3.1) on Page 23 shows a case, in which a successful synchronization
is completed. This table shows that the client sends the three synchronization
packet one by one and with an interval of about 0.3 seconds. The client also
receives three identical synchronization packets just after each packets is sent.
The Table(3.1) shows that as introduced in [1], once connected the AmigBot
will automatically send the SIPs back to the client every 100 milliseconds.
This means the receive block of the client needs to operate at least with the
same rate.
The Table(3.2) on Page 24 and Table(3.3) on Page 24 illustrate some
strange behavior of the AmigoBot. From the specification, if a SYNC0 packet
is sent by the client, the server should respond with an identical echo packet.
The client should then receive a packet like ”0xFA 0xFB 0x03 0x00 0x00 0x00”
but the Table(3.2) shows that a ”0xFA 0xFB 0x00” packet will be received.
The situation of Table(3.2) happens every time when the AmigoBot is switched
on. After several tests it was proven, that this behavior is a result only of
switching on the AmigoBot. The second erroneous behavior pattern is shown
in Table(3.3). Sometimes when the AmigoBot is switched on, at first the client
will receive a strange packet. There are two reasons for this: The first reason is
that the client’s RS232 buffer keeps the old data from the last connection. The
second reason is that the AmigoBot still sends the rest of data of the packet
25
Page 36
3.1 Analyzing the Synchronization and Initialization Process
which belongs to the last connection, because the AmigoBot is suddenly shut
down before the whole packet is sent. This second behavior pattern leads to a
synchronization error. If a SYNC0 packet is sent during the synchronization
phase, an identical echo packet will be received on the client side. If any packet
is sent at the wrong time, the AmigoBot will recognize that a wrong packet
is received and send back a packet ”0xFA 0xFB 0x03 0xFF 0x00 0xFF” to
the client. The packet ”0xFA 0xFB 0x03 0xFF 0x00 0xFF” is always used to
notify the client that some errors occurred during the communication. Because
of this behavior the client should send the SYNC0 packet again in order to
build the synchronization as shown in Table(3.3).
Table (3.4) on Page 24 shows an unsuccessful synchronization. The
reason is that the client sends the command with a higher rate than the
AmigoBot’s maximum accepted rate. The AmigoBot reads and processes the
client commands only once every 10 ms. If the client sends the commands
faster than this, the AmigoBot will send back an error message ”0xFA 0xFB
0x03 0xFF 0x00 0xFF”. After these four tests, the behavior of the AmigoBot
during the synchronization phase is clear. In the next section the initialization
process will be explained.
3.1.2 Analyzing the Initialization Process
3.1.2.1 Opening the Servers–OPEN
Once a communication link is established, the client should then send the
OPEN command #1 (no argument; 0xFA, 0xFB, 0x03, 0x01, 0x00, 0x01)
which causes the AmigoBot to perform a few housekeeping functions, start its
sonar and motor controllers (among other things), listen for client commands,
and begin transmitting server information packets.
3.1.2.2 Set the Sonar Firing Sequence–POLLING
When connected and opened, the AmigOS sonar server begins firing AmigoBot’s
sonar in the predefined default sequence, clockwise, beginning with the sonar
closest to the left wheel (sonar #0). As discussed in the introduction the
firing rate of the sonar sensor is 20Hz. If using the default sequence, each
sonar sensor will fire every 400 milliseconds which is too long for the control
requirement. To solve this problem a new sequence has to be set by sending
26
Page 37
3.1 Analyzing the Synchronization and Initialization Process
the POLLING command #3 (string argument,only sonar #0 works; 0xFA,
0xFB, 0x0C, 0x03, 0x2B, 0x01, 0x01, 0x01, 0x01, 0x01 0x01, 0x01,0x01, 0x07,
0x2F) to the AmigoBot. In order to activate the new sequence at the begin-
ning, this command has to be sent before the OPEN command is sent.
3.1.2.3 Enable the Motor
Once the client is connected to the AmigoBot , the AmigoBot’s motors are
disabled, regardless of their state when last connected. There are two ways
to start the motor: First is to manually press the black MOTORS/TEST
button. Second is to send an ENABLE client command #4 with an integer
argument of 1 ”0xFA 0xFB 0x06 0x04 0x3B 0x01 0x00 0x05 0x3B”. In this
project the second way will be used. Now the process of the synchronization
and initialization is clear, the next step is starting to build the AmigoBot
communication block.
3.1.3 Building the Synchronization and Initialization
Model
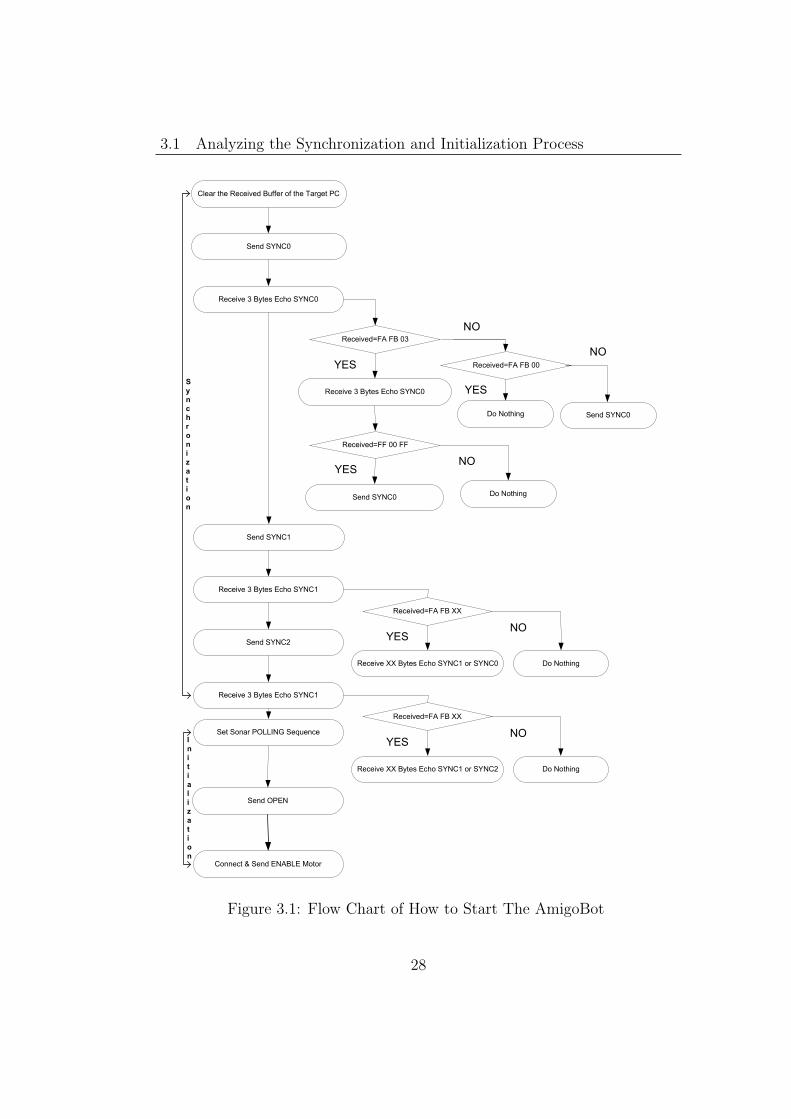
In the previous two sections the analyzing work was done and the next step
is to build the communication model using MATLAB. Figure(3.1) on Page 28
shows a flow chart of how to build this model. The figure shows that there are
two steps of starting the AmigoBot:
• Synchronization Process: Send the synchronization packets and receive
the echo packets in order to establish a connection.
• Initialization Process: Set the sonar polling sequence ,open the server
and enable the motor.
In the previous section the functionality of the xPC Target and Real-Time
Workshop are introduced, and how these functions are used to build the com-
munication will be given.
Figure(3.2) on Page 29 shows the top level of the communication block.
Together with this block there is an initial MATLAB m file(in Appendix B)
which contains some useful factors. These factors will help the block to work
more flexibly. This initial file should be the first file running under MATLAB.
This model file works with a sampling rate of 100 milliseconds which is the
27
Page 38
3.1 Analyzing the Synchronization and Initialization Process
Send SYNC0
Receive 3 Bytes Echo SYNC0
Received=FA FB 03
Clear the Received Buffer of the Target PC
Received=FF 00 FF
YES
Receive 3 Bytes Echo SYNC0
YES
Send SYNC0
NO
Do Nothing
Received=FA FB 00
YES
Do Nothing
NO
Send SYNC0
NO
Send SYNC1
Receive 3 Bytes Echo SYNC1
Send SYNC2
Received=FA FB XX
YESNO
Do NothingReceive XX Bytes Echo SYNC1 or SYNC0
Receive 3 Bytes Echo SYNC1
Set Sonar POLLING Sequence
Received=FA FB XX
YESNO
Do NothingReceive XX Bytes Echo SYNC1 or SYNC2
Send OPEN
Connect & Send ENABLE Motor
S
y
n
c
h
r
o
n
i
z
a
t
i
o
n
I
n
i
t
i
a
l
i
z
a
t
i
o
n
Figure 3.1: Flow Chart of How to Start The AmigoBot
28
Page 39
3.1 Analyzing the Synchronization and Initialization Process
Step Size: 0.1sPort: COM1Baud Rate:9600
11SonarRangeB
10 SonarIndexB
9SonarRangeA
8 SonarIndexA
7SonarReading
6X
5Y1
4Th
3RightWheel
2LeftWheel
1Check Sum
1
Start
RS-232Mainboard
Setup
RS232
160
R
240
L
Start
RightWheelSpeed
LeftWheelSpeed
Check Sum
Left
Right
Th
Y
X
SonarReading
SonarIndexA
SonarRangeA
SonarIndexB
SonarRangeB
AmigoBot Plant
Figure 3.2: AmigoBot Connector
same as the transmission rate of the SIPs. At the top level there is one ”RS-
232 Mainboard Setup” block, three inputs and eleven outputs. The ”RS-232
Mainboard Setup” block is used to initialize the communication of a COM1
port. The three inputs are used to:
1. Start: Start the AmigoBot with ”1” and disconnect the AmigoBot with
”0”.
2. Right: Set a speed to the right wheel of the AmigoBot with a unit of
mm/sec.
3. Left: Set a speed to the left wheel of the AmigoBot with a unit of
mm/sec.
The unit of speed can be changed by changing the speed factor SPEEDFAC-
TOR in the initial file. For example if the SPEEDFACTOR is set to 1, it
29
Page 40
3.1 Analyzing the Synchronization and Initialization Process
means the input speed multiplied by 40 will be the output speed in mm/sec.
The eleven outputs are the received values from the AmigoBot:
1. CheckSum: Represents the status of the current packet. ”1” means that
the current packet’s checksum is correct. ”0” means that the current
packet has been distorted during the transmission.
2. LeftWheel: The received left wheel speed.
3. RightWheel: The received right wheel speed.
4. Th: The received orientation position.
5. X: The received X position.
6. Y: The received Y position.
7. SonarReading: Number of new sonar sensor readings in the packet.
8. SonarIndexA: The even index of the sonar sensor number in the sonar
polling sequence.
9. SonarRangeA: The sonar range of the sonar sensor 0,2,4,6.
10. SonarIndexB: The odd index of the sonar sensor number in the sonar
polling sequence.
11. SonarRangeB: The sonar range of the sonar sensor 1,3,5,7.
As mentioned in Chapter 2 the AmigoBot will send the SIPs every 100 mil-
lisecond or 50 milliseconds depending on the configuration of the AmigOS. If
the configuration of the SIP is different, then the format of the SIP is also
different. In comparing the 100 millisecond configuration with the 50 millisec-
ond configuration, the sonar information can be different. The sonar firing
rate of the AmigoBot is every 50 milliseconds and the 8 sonar sensors will fire
one after the other. This means every 50 milliseconds only one sonar sensor
is working and all the others are sleeping.If the configuration is set to send
the SIPs every 100 milliseconds, then there will be two sonar sensors putting
their measured values in the SIP. By default the 8 sonar sensor values will be
sent in 4 continuous SIPs while the sonar sensors are firing in a continuous
sequence. If the SIPs are sent every 50 milliseconds then there will be only
30
Page 41
3.1 Analyzing the Synchronization and Initialization Process
one sonar measured value in the SIP. The 8 sonar sensor values will be sent
in 8 continuous SIPs. The AmigoBot Connecter shown above works only for
the situation in which the SIPs are sent every 100 milliseconds. This is the
default configuration of the robot and it can be changed to 50 milliseconds.
The default polling sequence of the sonar sensors is continuous and this can
be changed by using the POLLING command. The POLLING command
is used to set a new sonar sensor firing sequence(e.g only one sonar sensor
fires every 50 milliseconds). In this application only the sonar sensor #5 is of
interest, so in the initial file the factor SEQUENCE1 to SEQUENCE8 are
all set to 6 and the factor SonarIndex100B is set to 5. This means when
the application starts, the sonar sensor #5 will fire every 50 milliseconds and
the output SonarRangeB will output the received value of sonar sensor #5.
This is the solution to the problem mentioned in the introduction, now the
feed back information comes every 100 milliseconds not in every 400 millisec-
onds as before. Figure(3.3) shows the second level of the whole model. The
11SonarRangeB
10SonarIndexB
9SonarRangeA
8 SonarIndexA
7SonarReading
6X
5Y
4Th
3Right
2Left
1Check Sum
Start
Synchronization & Initialization
Enable
Right
Left
Set Speed
Received data
Left
Right
Th
Y
X
SonarReading
SonarIndexA
SonarRangeA
SonarIndexB
SonarRangeB
Decode SIP
auto(double)
Start
Check Sum
Data
Receive SIP
3LeftWheelSpeed
2RightWheelSpeed
1Start
Figure 3.3: Second Level of the AmigoBot Connector.
31
Page 42
3.1 Analyzing the Synchronization and Initialization Process
second level is divided into three parts:
• Synchronization & Initialization: The task of the subsystem ”Synchro-
nization & Initialization” is to synchronize with the AmigoBot, open the
server and enable the motor.
• Receive SIP & Decode SIP: In the subsystem ”Receive SIP & Decode
SIP” the functions to receive the SIP and decode the information from
the SIP are implemented.
• Set Speed: In the subsystem ”Set Speed” the commands of setting the
velocity of the robot will be sent to the AmigoBot if the correct infor-
mation from the AmigoBot is received.
3.1.3.1 Subsystem Synchronization and Initialization
Figure(3.4) on Page 33 shows the subsystem ”Synchronization & Initializa-
tion”. As shown in the flow chart on Page 28 the whole ”Synchronization &
Initialization” process works like a state machine and the communication is
synchronous. In this subsystem a state counter is used to control the whole
”Synchronization & Initialization” process. This time a ”Discrete-Time Inte-
grator” is chosen as the counter. The behavior of the ”Discrete-Time Integra-
tor” is that the output is increased by the input value during each sampling
time until it reaches the upper saturation limit. Here the upper limit is set
to ”11” and the sampling time to ”1” second. The output of the ”Discrete-
Time Integrator” is connected to a ”Switch Case” tool block. These two
blocks work together as a state machine. Once the whole model is started
the state machine starts too. When the model has already been started for 1
second, the counter will counts to 1 and only the block connects to the output
”case[1]” will start to work. When the model has already been started for
2 seconds, the counter will counts to 2 and only the block connects to the
output ”case[2]” will start to work. After the model has already been started
for 11 seconds, the counter will counts its limit 11 for ever and this state ma-
chine stops working. The execution order of the output of the state machine
is ”Clear the Receive Buffer”—>”Send SYNC0”—>”Receive SYNC0”—
>”Send SYNC1”—>”Receive SYNC1” —>”Send SYNC2”—>”Receive
SYNC2”—>”POLLING Sonar” —>”Send OPEN” —>”ENABLE Mo-
32
Page 43
3.1 Analyzing the Synchronization and Initialization Process
u1
case [ 1 ]:
case [ 2 ]:
case [ 3 ]:
case [ 4 ]:
case [ 5 ]:
case [ 6 ]:
case [ 7 ]:
case [ 8 ]:
case [ 9 ]:
case [ 10 ]:
case [ 13 ]:
State Machine
T
z-1
State Counter
case: { }
Send SYNC1
case: { }
Send SYNC0
case: { }
Send OPEN
case: { }
Send SYNC2
case: { }
Receive SYNC2
case: { }
Receive SYNC1
case: { }
Receive SYNC0
case: { }
Polling Sonar
NOT 2
case: { }
Enable Motor
case: { }
Disconnect
auto(double)
case: { }
Clear the Receive Buffer
1Start
Figure 3.4: Synchronization & Initialization.
33
Page 44
3.1 Analyzing the Synchronization and Initialization Process
tor”. If the input ”Start” changes to ”0” then the process ”Disconnect” will
be executed.
1. ”Clear the Receive Buffer”: In this state a built-in S-Function will clear
the RS232 received buffer on the Target PC. Figure(3.5) shows the RS232
Current Received Byte
Current Read Byte
Figure 3.5: The RS232 Received Buffer on the Target PC
buffering mechanism of the target PC. The buffer is a circular buffer with
a size of 1024 bytes. There are two pointers of the circular buffer: one
points to the current received byte from the AmigoBot, the other points
to the current read byte by the receive block. If the receiving speed is
much faster than the reading speed and once the differences are greater
than 1024 bytes, the old unread bytes will be wrapped up by the newly
received bytes. If the receiving speed is slower than the reading speed,
the receive block will wait until a new byte comes. Why the first state
is the ”Clear the Receive Buffer” is already explained in the previous
section for a case such as Table(3.3).
2. ”Send SYNC0”: In this state the SYNC0 packet will be sent. Figure(3.6)
on Page 35 shows the SYNC0 packet is sent by the ”RS232 Binary Send
Block”. The ”RS232 Binary Receive Block” is a tool block provided by
the Simulink Library for the xPC Target. In this state a 6 bytes long
packet ”0xFA 0xFB 0x03 0x00 0x00 0x00” will be sent to the AmigoBot
via the COM1 port of the Target PC with a sample rate inherited from
the upper block.
34
Page 45
3.1 Analyzing the Synchronization and Initialization Process
[250 251 3 0 0 0]
SYNC0
RS232 SendCOM1
RS232Binary Send
case: { }
Action Port
Figure 3.6: Sending the SYNC0 Packet
3. ”Receive SYNC0”: In this state the receiving process will follow the
flow chart given in the previous section. Figure(3.7) shows how this
UnpackUnpack
[250 251 3 0 0 0]
[250 251 3 0 0 0]
==
==
==
==
==
Data
Enable
RS232 SendCOM1
Data
Enable
RS232 SendCOM1
Length
Enable
Done
Data
RS232 ReceiveCOM1
Length
Enable
Done
Data
RS232 ReceiveCOM1
NOTOR
AND
3
Length
255
FF
251
FB
250
FA
(double)
(double)
auto(double)
3
0
1
3
case: { }
Figure 3.7: Receiving the Echo of SYNC0
receiving procedure works. The first step in this state is to receive 3
bytes. If the three bytes is ”0xFA 0xFB 0x00” this means the SYNC0
is received by the AmigoBot and the process will go to the next state.
If not the program will receive the next 3 bytes. The second step is to
check these 3 new bytes, if they are ”0x00 0x00 0x00” then the process
can go to the next state otherwise the SYNC0 has to be sent again.
4. ”Send SYNC1”: In this state the SYNC1 packet will be sent.
35
Page 46
3.1 Analyzing the Synchronization and Initialization Process
5. ”Receive SYNC1: In this state the echo of SYNC1 or the echo of the
SYNC0 packet will be received. Whether the echo of the SYNC1 or
SYNC0 will be received depends on the state ”Receive SYNC0”. If
in the state ”Received SYNC0” there is no packet SYNC0 sent, then
the echo of SYNC1 will be received in this state. Otherwise the echo of
SYNC0 will be received. Figure(3.8) shows how this receive procedure
Packet Length
Unpack==
==
Length
Enable
Done
Data
RS232 ReceiveCOM1
Length
Enable
Done
Data
RS232 ReceiveCOM1
AND
251
FB
250
FA
auto(double)
auto(double)
1
3
case: { }
Figure 3.8: Receiving the Echo of SYNC1
works. This procedure is a standard receiving block for the AmigoBot.
Firstly it receives the first three bytes of an AmigoBot communication
packet and finds out the length of the received packet. Second it config-
ures another receiving block to receive the rest data of the packet. This
procedure guarantees a whole packet is received when the length of the
packet is unknown.
6. ”Send SYNC2”: In this state the SYNC2 packet will be sent.
7. ”Receive SYNC2: In this state the echo of the SYNC2 or SYNC1
packet will be received.
8. ”POLLING Sonar: In this state a sonar sensor firing sequence will be
set to the AmigoBot’s sonar server. The sequence is defined in the initial
file and can be changed before each start of the application.
9. ”Send OPEN”: Before this state the synchronization process is finished
and the xPC Target should successfully be connected to the AmigoBot.
36
Page 47
3.2 Receive and Decode the SIPs
Now the initialization process can be started. The first task of the ini-
tialization process is to send an OPEN command to the AmigoBot.
10. ”ENABLE Motor”: In this state the command ENABLE motor will
be sent and the motor of the AmigoBot will be started.
This is the implementation of the synchronization and the initialization subsys-
tems. When the synchronization and initialization are finished the AmigoBot
will start to send its SIPs to the client.
3.2 Receive and Decode the SIPs
3.2.1 Subsystem Receive the SIPs
In the following part, the functionality of the subsystem ”Receive and De-
code the SIPs” will be introduced. Figure(3.9) shows the subsystem ”Receive
2Data
1Check Sum
u1 case [ 10 ]:T
z-1
State CounterRate Transition
auto(double)
case: { }
CheckSum
Data
1Start
Figure 3.9: Subsystem Receiving SIP
SIP”. In this subsystem a synchronous ”State Counter” is used. This ”State
Counter” works the same as the ”State Counter” on the subsystem ”Synchro-
nization and Initialization” and both of these two counters have the same
output value at the same time. The only difference is that before this ”State
Counter” a ”Rate Transition” tool block is used. This ”Rate Transition” will
convert the sample time of this block from 1 second to 0.1 second which means
the subsystem connecting to the output, works with a sampling time of 0.1
second too. The reason of using it is that the AmigoBot sends the SIP packets
with a rate of 0.1s and the client has to send the commands with a rate of 0.1s
also. this subsystem there is another subsystem which has two outputs. The
two outputs are the checksum and received data. This subsystem will start
37
Page 48
3.2 Receive and Decode the SIPs
to work only after the application has already been running for 10 seconds.
The reason is that the ”State Counter” will enable the subsystem connect to
it when the counter counts 10. Figure (3.10) shows the sub subsystem ”Re-
2Data
1CheckSum
Data
CheckSum
AmigoBot SIP RS232 Receive 8COM1
AmigoBot SIP Receive Block
case: { }
Action Port
Figure 3.10: Sub Subsystem Receiving SIP
ceive SIP”. In this sub subsystem there is only a receive block. The receive
block contains an S-Function called ”rs232brec amigo8”. This S-Function did
the most important job of the whole block. When this S-Function starts the
following situations may occur:
1. There is less than one SIP in the circular buffer.
2. There are several SIPs already in the circular buffer.
In the first step it will receive all the bytes from the target PC’s RS232 circular
buffer. A variable ”bufCount” will return the number of bytes in the circular
buffer. For the second step it will loop through these bytes, find if there are
any header bytes in the buffer. A variable ”current” is used as an index to
help copying the bytes to the output buffer. Once the header is found, the
program will start to process a packet called ”OUTPUTPACKET” which is a
packet just before this header and in the buffer. The third step is to calculate
the check sum of the packet ”OUTPUTPACKET” by using the index variable
”current”. If the calculated check sum is the same as the received check sum
then the ”OUTPUTPACKET” will be sent to the output buffer and the index
variable ”current” will be reset. This programming logic will suit for both
situations listed above. If there is less than one SIP in the circular buffer, it
will wait until the whole packet arrives. If there are several SIPs in the buffer,
it will send the last received whole packet to the output buffer, free the spaces
in the buffer except the rest of the bytes in the buffer which belong to the next
38
Page 49
3.2 Receive and Decode the SIPs
packet. This programming logic will also guarantee the distorted packet will
not be output. The following is part of the S-Function.
.......
//Read how many bytes are in the circular buffer
bufCount = rl32eReceiveBufferCount(port);
/*every time put all the received data into the buf*/
//Loop through the whole buffer and find the header position
while (bufCount) {
tmp = rl32eReceiveChar(port);
if ((tmp & 0xff00) != 0) {
printf("RS232Receive: Error\n");
return;
}
//Find continues "FA FB" as header
if(tmp==250) *findFA=*current;
if(tmp==251) *findFB=*current;
if((*findFB-*findFA)==1)
{
*findFAFB=1;
*findFA=*findFB=0;
}
//Once find the Header
if(*findFAFB==1)
{
//Calculate the CheckSum
for(i=2;i<*current-3;i=i+2)
{
if((i+1)<(*current-3))
sum=sum+(buf[i]<<8 | buf[i+1]);
else
sum=sum+buf[i];
sum=sum & 0xffff;
}
//compare the calculated checksum with the
//received one
39
Page 50
3.2 Receive and Decode the SIPs
if(sum==(buf[*current-3]<<8 | buf[*current-2]))
*output_checksum=1;
else
*output_checksum=0;
//the *current is used to control the output
//packet
*current=0;
//Output the data when the packet is correct
if(*output_checksum==1)
memcpy(ssGetOutputPortSignal(S, 0), buf, width);
*findFAFB=0;
}
//put the byte to the output buffer
buf[(*current)] = tmp & 0xff;
*current=*current+1;
bufCount--;
}
......
Finally the subsystem will give two outputs: the check sum and a whole SIP
packet which shifts to the left by one byte. The SIP packet is then sent to a
subsystem which decodes the whole packet into several useful values.
3.2.2 Subsystem Decode the SIPs
Figure(3.11) on Page 41 shows how the subsystem decodes the SIP into the
user wanted data. In this sub subsystem the whole SIP will be decoded into
three kinds of information such as speed, position and the sonar related values.
In the figure two ”Target Scope” blocks are used in this subsystem. The usage
of the ”Target Scope” block is that it can display the signal which connected
to it on the screen of the target PC. The detailed setup of this ”Target Scope”
please check the model file delivered with this thesis. Figure(3.12) on Page 41
shows an example of decoding the SIP to the user wanted data: the speed of the
left wheel. In this sub subsystem another built-in S-Function ”amigo convert”
is used. The received data is an array of bytes but this data can’t be directly
used by the user. The Table(2.3) shows that the user wanted values in the SIP
have different types and different length. The functionality of the S-Function
40
Page 51
3.2 Receive and Decode the SIPs
10SonarRangeB
9 SonarIndexB
8SonarRangeA
7 SonarIndexA
6SonarReading
5X
4Y
3Th
2Right
1Left
6a7 Y
get Y
4a5 X
get X
8a9 Th
get Th
22a28
SonarReading
SonarIndexA
SonarRangeA
SonartIndexB
SonarRangeB
get Sonar Readings
12a13 Right
get RightWheel Speed
10a11 Left
get Left Wheel Speed
Target ScopeId: 2
Scope (xPC) 2
Target ScopeId: 1
Scope (xPC) 1
1 Received data
Figure 3.11: Decoding the SIP to User Wanted Data
1Left
WHEELSPEEDFACTORData ValueAmigo Converter
Data converter
auto(double)1
10a11
Figure 3.12: Sub Subsystem to Detect the Speed of the Left Wheel
41
Page 52
3.2 Receive and Decode the SIPs
”amigo convert” is given by two parameters the ”Start” and the ”Mode” to
reform the bytes to the user wanted value. The following piece of code is part
of the S-Function ”amigo convert”. The parameter ”Start” is used to signify
where the start position of the wanted data in the packet is. The parameter
”Mode” is used to tell how many bytes are used to compose the wanted data
and what kinds of value it is.
...
// get the start position of the value
// you want to reform
int start = (int)mxGetPr(START_ARG)[0];
// Select the Mode byte,unsigned int,signed int,int
int mode = (int)mxGetPr(MODE_ARG)[0];
int *y =(int *)ssGetOutputPortSignal(S,0);
int tmp;
unsigned char *u=(unsigned char *)ssGetInputPortSignalPtrs(S,0);
switch (mode)
{
// Byte
case 0 : tmp=(int)u[start]; break;
// Unsigned Integer
case 1 : tmp=(int)(u[start]+((unsigned short int)
u[start+1] << 8)); break;
// Signed Integer convert 2 bytes to Signed Integer
case 2 :
tmp=(int)((signed short int)(u[start]+((int)u[start+1] << 8)));
break;
// Integer
case 3 : tmp=(int)((short int)u[start]+
((short int)u[start+1] << 8)); break;
default: break;
}
*y=tmp;
...
For example the parameter for the left wheel speed is ”Start=9” and ”Mode=2”.
This means the left wheel speed is composed by two bytes and is a signed in-
42
Page 53
3.3 Setting the Wheel Speed
teger. The S-Function finds the start byte, left shifts the next byte by 8 bits
and then plus them together to get the speed. Figure(3.13) shows the sub sub-
5SonarRangeB
4SonartIndexB
3SonarRangeA
2SonarIndexA
1SonarReading
u1 if(..)
if { }In1 Out1
if { }In1 Out1
u1 if(..)
Data ValueAmigo Converter
Data ValueAmigo Converter
Data ValueAmigo Converter
Data ValueAmigo Converter
Data ValueAmigo Converter
auto(double)
auto(double)
auto(double)
auto(double)
auto(double)
1
22a28
Figure 3.13: Sub Subsystem Get the Sonar Values: New Sonar Readings Sonar-RangeA and SonarRangeB
system of getting sonar sensor values. Normally for a 100 milliseconds system
each SIP contains two new pieces of sonar information and for a 50 milliseconds
system only one new sonar value will be given. This sub subsystem provides
a functionality to choose the sonar values which are of interest. For example
if the sonar 4 and 5 are of interest, the user needs to set two variables in an
initial file:
• ”SONARINDEX100A=4;”
• ”SONARINDEX100B=5;”;
This means if the output SonarIndexA=SONARINDEX100A=4 then the Sonar-
RangeA outputs the new measured data of sonar 4.
3.3 Setting the Wheel Speed
Figure(3.14) on Page 44 shows the block of creating a command packet for
setting wheel speed. The Table(A.1) on Page 83 shows the AmigOS’s Com-
mand Set and the Table(2.4) on Page 19 shows the format of the AmigOS’s
43
Page 54
3.3 Setting the Wheel Speed
SPEEDFACTOR
SPEEDFACTOR
round
round Right
Left
Enable
AmigoBot Speed Command
RS232 SendCOM1
Give Speed
auto(int8)
auto(int8)
3Left
2Right
1Enable
Figure 3.14: Generating a Setting Wheel Speed Command Packet
Client Command Packet. These two tables together describe how to build a
Client Command Packet. Here the command number #32 is used to set the
wheel speed. The speed can be set to a positive or a negative value which
depends on the setting of the command’s argument. An S-Function called
”rs232bsend speed” is created to format this command packet. The S-Function
will first check if the ”Enable” input is set. If it is not set the program will
just do nothing otherwise the program needs to generate a command packet.
As known the argument type of the speed command VEL2 is integer and
the most significant bit signs to the speed of the left wheel. This means the
”Argument Type” parameter described in Table(2.4) is chosen by the speed of
the left wheel. If the speed of the left wheel is set to a non-negative value then
the value ”0x3B” will be put into the command packet, otherwise the value
”0x1B” will be used. After the argument type is fixed, the argument has to be
filled into the packet. In the specification of the AmigoBot there is no more
information about how to format this client command packet except in the
Table(A.1). The following examples of setting the speed command are found
by the author himself by experiments. Five examples of the speed commands
are given in Figure(3.15) on Page 45. In the previous section, the speed given
to the system is in a unit of mm/sec but the speed command packet only
accepts a unit of 40mm/sec. This means the value will be divided with 40 and
then fill into the corresponding position in the speed command packet.
1. Experiment 1 shows that both of the wheel speeds are positive so the
fifth byte of the packet is set to ”0x3B”. The S-Function will put the
speed of the right wheel into the sixth byte and the speed of the left wheel
to the seventh byte. The eighth and ninth bytes are the check sum of
44
Page 55
3.3 Setting the Wheel Speed
FA FB 06 20 3B 01 01 21 3C
Header1 Header2 Length Command
VEL2
Left Wheel
Speed
Right Wheel
Speed
Argument
Postive
Integer
Check Sum
+
+
FA FB 06 20 1B 03 02 23 1D
Header1 Header2 Length Command
VEL2
Left Wheel
Speed
Right Wheel
Speed
Argument
Negative
Integer
Check Sum
Example1:
Left Wheel Speed: 1*40mm/sec=40mm/sec
Right Wheel Speed 1*40mm/sec=40mm/sec
Example3:
Left Wheel Speed: -3*40mm/sec=-120mm/sec
Right Wheel Speed -3*40mm/sec=-120mm/sec
FA FB 06 20 1B FF 00 1F 1B
Header1 Header2 Length Command
VEL2
Left Wheel
Speed
Right Wheel
Speed
Argument
Negative
Integer
Check Sum
Example4:
Left Wheel Speed: -1*40mm/sec=-40mm/sec
Right Wheel Speed 1*40mm/sec=40mm/sec
FA FB 06 20 1B 00 01 20 1C
Header1 Header2 Length Command
VEL2
Left Wheel
Speed
Right Wheel
Speed
Argument
Negative
Integer
Check Sum
Example5:
Left Wheel Speed: -1*40mm/sec=-40mm/sec
Right Wheel Speed 0*40mm/sec=0mm/sec
FA FB 06 20 3B FF 01 1F 3C
Header1 Header2 Length Command
VEL2
Left Wheel
Speed
Right Wheel
Speed
Argument
Negative
Integer
Check Sum
Example2:
Left Wheel Speed: 1*40mm/sec=40mm/sec
Right Wheel Speed -1*40mm/sec=-40mm/sec
Figure 3.15: Five Examples of the Speed Commands
45
Page 56
3.4 Testing the Communication Block and Analyzing the ServerInformation
the packet. The first byte of the check sum is calculated by adding the
fourth byte with the sixth byte. The second byte of the check sum is
calculated by adding the fifth byte with the seventh byte.
2. Experiment 2 is the case that the speed of the left wheel is a positive one
and the speed of the right wheel is a negative one. In this case the speed
of the right wheel ”-1” will be set to the fifth byte which presented by a
signed byte ”0xFF”. Now the sum of the fourth and sixth byte is equal
”0x11F”, but only the lower 8 bits ”0x1F” will be put into the first byte
of the check sum.
3. Experiment 3 shows that the both of the wheel speeds are negative so the
fifth byte of the packet is set to ”0x1B”. Now the format of the packet will
be different from the case when the left wheel speed is positive. Please
notice now the value of the sixth byte in the packet is the absolute value
of the right wheel speed and the value of the seventh byte is the absolute
value of the left wheel speed minus 1.
4. Experiment 4 is the case that the left wheel speed is negative and the
right wheel speed is positive. In this case, the value of the sixth byte
in the packet is presented by a signed byte ”0xFF” and the value of the
seventh byte is the absolute value of the left wheel speed minus 1.
5. Experiment 5 shows that the left wheel speed is negative and the right
wheel speed is 0. Now the value of the sixth byte is 0 and the value of
the seventh part is the absolute value of the left wheel speed.
The S-Function ”rs232bsend speed” is designed base on these experiments
and the programming logic of this S-Function please look at the electrical file
deliver together with this thesis.
3.4 Testing the Communication Block and An-
alyzing the Server Information
The previous sections explained how the communication model is realized
and how the AmigoBot behaves during the communication process. In this
section some figures will illustrate the received information from the AmigoBot
46
Page 57
3.4 Testing the Communication Block and Analyzing the ServerInformation
such as the wheel speed, the robot position, the sonar sensor values and so
on. Figure(3.16) shows the timing sequence diagram of the communication
0 1 2 3 4 5 6 7 8 9 10 Time Line (seconds)11 12
Clear the Received Buffer
Send SYNC0
Receive SYNC0
Send SYNC1
Receive SYNC1
Send SYNC2
Receive SYNC2
POLLING Sonar
Send OPEN
ENABLE Motor
Synchronization
Initialization
Start to receive SIP every 0.1 second
The first correct SIP has been
receiced then send the first
client command
Start to send client command every 0.1 second
The first client command is
accepted. Wheel speed is
accelerated
Figure 3.16: Timing Sequence Diagram of the Communication Block.
block. This sequence diagram indicates the expected timing behavior of the
communication block: Synchronization process will start from the 1st second
and finish at the 7th second. Initialization process will start from the 8th
second and finish at the 10th second. From the 11th second on, the SIP will be
received in every 100 milliseconds. The first correct SIP will be received at 11.2
second and at the same time the first client command will be sent. From the
11.2 second on, the client command will be send in every 100 milliseconds too.
The AmigOS will accept the first client command with a delay of 0.2 seconds
so the wheel speed will be set around 11.5 second. Figure(3.17) on Page 48
shows an experiment result of the communication block’s timing behavior. The
result of the experiment proves the correctness of the above sequence diagram.
It also shows why the SIPs are received from the 11th second but not the 10th
second. The reason is for the second state counter the sampling rate is 100
milliseconds so it will reach the value 10 from the 11th second. This figure
also shows there is a delay between the first correctly received SIP and the
first set wheel speed. The reason for this delay is the AmigoBot needs time to
accept the client command and accelerate the wheel speed.
As described in the specification most of the received values need to be
multiplied with a factor to get the real value. Table(2.3) on Page 16 contains
47
Page 58
3.4 Testing the Communication Block and Analyzing the ServerInformation
0 5 10 15 20 25 30 35 400
2
4
6
8
10
12
Time
Val
ue
Timing Analysis
ChecksumState Counter1State Counter2Speed/120
Figure 3.17: Time Analysis of the Communication Block
the list of the operating parameters which need to be multiplied with a factor.
The first operating parameter to be discussed is the robot’s position. The
position of the robot contains three kinds of information: the X position, the Y
position and the Theta position. These three kinds of information are relative
to the start point of the robot. Figure(3.18) shows the received X position.
0 5 10 15 20 25 30 350
1000
2000
3000
4000
5000
6000
Time
Val
ue
X Multiplied With Factor and Original X
X Multiplied With A Factor 0.5083Original X
Figure 3.18: Received X Position Information.
The red curve is the original data received from the SIP packet. The blue
48
Page 59
3.4 Testing the Communication Block and Analyzing the ServerInformation
curve is the original data multiplied with a factor of 0.5083. The blue curve is
proved as the actual value by measuring how far the robot moves with a ruler.
In this measurement both wheels of the robot have the same speed. This figure
also shows the sampling time of the model to be 100 ms while the X position
is increased every 100 ms. The Y position has the same behavior as the X
position and also needs to be multiplied with a factor 0.5083. Figure(3.19) on
Page 50 shows the case when two wheel speeds are set to different values. All
these values are already multiplied with the corresponding factors listed in the
Table(2.3). The theta values are converted to degrees in this MATLAB model.
The first figure shows that even though the given wheel speeds are constants,
the real speeds are always oscillating around the given values. The second
figure shows the position information of the robot if the two wheel speeds are
different. The third figure indicates the robot will move following a circular
track because of the different wheel speeds.
The previous section shows the positional information of the robot. Now
the motion information of the robot will be introduced – the wheel speed of
the robot. Figure(3.20) on Page 51 shows the received wheel speed and the
speed calculated from the X position. In the experiment, the speed of both
wheels are set by the Client Command ”0xFA 0xFB 0x06 0x20 0x3B 0x03
0x03 0x23 0x3E”. As described in the Table(A.1) on Page 83 this means the
outputted wheel speed should be 60mm/sec. The figure on the left shows
the actual received value is about 90mm/sec. But the calculated speed from
the X position of the robot on the right figure is: speed=BC/BA=(2154-
996.3)/(30-20)=115.7mm/sec. This creates a problem: why the speeds are
different and which one is the correct one. In order to investigate the sys-
tem, the following experiment was done: Give 7 stepped speeds to both
wheels, for example in the client command set speed to 0,1,2,3,4,5 and 6 which
means 0mm/sec,20mm/sec,40mm/sec,60mm/sec, 80mm/sec,100mm/sec and
120mm/sec. Figure(3.21) on Page 51 shows the result of the experiment. The
figure shows the speed is increased about 30mm/sec for each step. The first
explanation of the problem may be that the quantization always affects the
speed by factors of (20mm+40mm)/2 sec=30mm/sec. Now why the given
speed is different to the received speed is clear. The quantization function of
the AmigOS will always quantize the input speed to the nearest step.
49
Page 60
3.4 Testing the Communication Block and Analyzing the ServerInformation
0 5 10 15 20 25 30 35 40 450
50
100
150
200
250
300
Time
Spe
ed
Left And Right Wheel Speed
Left Wheel Speed 2Right Wheel Speed 6
0 5 10 15 20 25 30 35 40 45-300
-200
-100
0
100
200
300
400
500
Time
Val
ue
X,Y Theta
ThetaYX
0 50 100 150 200 250 300 350 400 450 500-250
-200
-150
-100
-50
0
50
100
150
200
250
X Position
Y P
ositi
on
AmigoBot Moving Track
Figure 3.19: Setting Different Speeds of Left and Right Wheels
50
Page 61
3.4 Testing the Communication Block and Analyzing the ServerInformation
0 5 10 15 20 25 30 350
20
40
60
80
100
120
140
Time
Spe
ed
Left And Right Wheel Speed
Left Wheel SpeedRight Wheel Speed
0 5 10 15 20 25 30 350
1000
2000
3000
4000
5000
6000
Time
Val
ue
X Multiplied With Factor and Original X
X Multiplied With A Factor 0.5083Original X
A (20 996.3) B (30 996.3)
C (30 2154)
Figure 3.20: Analyzing the Received Wheel Speed.
0 20 40 60 80 100 120 1400
20
40
60
80
100
120
140
160
180
200
Time
Spe
ed
Left And Right Wheel Speed
Left Wheel SpeedRight Wheel SpeedRamp * 3Set Speed * 30Set Speed * 20
Figure 3.21: Received Left Wheel Speed with 7 Steps.
51
Page 62
3.4 Testing the Communication Block and Analyzing the ServerInformation
0 20 40 60 80 100 120 1400
5000
10000
15000
Time
Val
ue
X
X
A(20 0)B (40 767)
C (60 2301)
D (80 4653)
E (100 7722)
F (120 11608)
Figure 3.22: Received X Position Information (Wheel Speed with 6 Steps).
Figure(3.22) shows the corresponding X position information of a given
wheel speed with 6 steps. From this figure the wheel speed can also be calcu-
lated from the X position.
Set Speed Received Wheel Speed Measured Speed From X Position
20 30 38.35 (B-A)/20
40 60 76.7 (C-B)/20
60 90 117.6 (D-C)/20
80 120 153.45 (E-D)/20
100 150 194.3 (F-E)/20
Table 3.5: AmigOS Wheel Speed Analysis (mm/sec)
Table(3.5) shows the problem of getting the actual speed of the AmigoBot.
From the experiment the measured speed is proven to have the same value as
the speed calculated from X position. The second explanation of the problem
”why the given speed is different to the measured speed”, still needs to be
discussed. One possible explanation is that there is a forgotten factor in the
specification. But before discovering the answer, the calculated speed from X
position will be chosen as the actual speed of the robot.
52
Page 63
3.4 Testing the Communication Block and Analyzing the ServerInformation
0 20 40 60 80 100 1200
500
1000
1500
2000
2500
3000
3500
4000
Time
Spe
ed
Left And Right Wheel Speed
Left Wheel SpeedRight Wheel SpeedRampSet Speed
Figure 3.23: Find The Maximum Speed.
Figure(3.23) shows the measured maximum speed as can be set to the
robot. In this experiment the wheel speeds are set with 10 steps. The step size
is 10 which means the speed will increase 400mm/sec in each step until it reach
the maximum value. As discussed before, there may be a forgotten factor in
the specification and the actual speed of the robot equals the measured value
multiply by 1.33. The maximum measured speed shown in the Figure(3.23) is
about 1590mm/sec so the maximum actual speed will be around 2114mm/sec.
0 10 20 30 40 50 60 70 80-500
0
500
1000
1500
2000
2500
3000
Time
Val
ue
X,Y Theta
ThetaYX
0 10 20 30 40 50 60 70 80-150
-100
-50
0
50
100
150
Time
Spe
ed
Left And Right Wheel Speed
Left Wheel SpeedRight Wheel Speed
Figure 3.24: Set the Left and Right Wheel Speed to Positive and NegativeValues
Figure(3.24) shows the model starting with a given speed 160mm/sec
for both wheels and after a certain time change the speed of the right wheel to
53
Page 64
3.4 Testing the Communication Block and Analyzing the ServerInformation
-160mm/sec then at last change the speed of the left wheel to -160mm/sec too.
This figure shows that the S-Function ”rs232bsend speed” works as expected.
The x,y and θ position of the robot shows that the robot will move forward
when both speeds are positive. When the right wheel speed is negative and the
left speed is positive, the robot will rotate clock wise at the same x position.
When both speeds are negative, the robot will move straight forward again
from the point where the speed are set to negative.
In the following part the sonar information of the robot will be intro-
duced. In this project the sonar information will be used by the controller of
the robot. The AmigoBot has 8 sonar sensors which together provids nearly
360 degrees of range sensing. Figure(3.25) shows an experiment to find the
0 10 20 30 40 50 60 70 800
1000
2000
3000
4000
5000
6000
7000Analysis The Sonar Working Range
Time(s)
Dis
tanc
e T
o W
all (
mm
)
Figure 3.25: Find the Max and Min Sonar Working Range.
maximum and minimum sonar working range. The experiment is like this:
First disable all the other sonar sensors except the one in the front. Second let
the robot move from a large distance towards the wall. Third hold the robot
by hand and move back from the nearest distance to far away from the wall.
When moving back keep the sonar vertical to the wall and move slowly. This
figure shows the working range of the sonar is from about 6880 mm to 160 mm
and the sonar will recognize the distance larger or smaller than the range as
54
Page 65
3.4 Testing the Communication Block and Analyzing the ServerInformation
the maximum or minimum value. When letting the robot itself move towards
the wall some times the sonar will lost the signal reflected back and recognize
the wall as being far away. The reason for this is the sonar is not directly fac-
ing to the wall and some ultrasonic waves will be reflected in other directions
which can’t be retrieved by the sensor. In this project, the robot will move
forward and follow a wall with a distance of 300mm. Figure(3.26) shows an
WALL
300mm
0
10
20
30
40
-10
-20
-30
-40
Figure 3.26: Experiment To Test the Behavior of the Sonar 5 .
experiment to test the behavior of the Sonar 5. As shown on the figure, the
wall is about 300mm away from the robot. The AmigoBot will be rotated by
hand. The center of the rotation is the Sonar 5. First the AmigoBot is ro-
tated clock wise with a step of 10 degrees. The measured values corresponding
to theta, equals -10 degrees ,-20 degrees,-30 degrees and -40 degrees. Second
AmigoBot is returned to the original position and rotated counter clock wise.
The measured value corresponding to theta equals 10 degrees ,20 degrees,30
degrees and 40 degrees. Figure(3.27) on Page 56 shows the experimental re-
sults of rotating the sonar 5. The figure shows the useful range of the sonar 5
is between 10 and -10 degrees. This experiment shows that the useful range
of the sonar sensor is very small and can’t be used for any control application.
To solve this problem a special material is used to allow more ultrasonic wave
be reflected. The surface of this material is composed of lots of cylindrical
barriers which reflect the ultrasonic waves in every direction.
55
Page 66
3.4 Testing the Communication Block and Analyzing the ServerInformation
0 50 100 150 200 250 300 3500
500
1000
1500
2000
2500Analysis The Sonar Value With The Angle To Wall
Time(s)
Dis
tanc
e T
o W
all (
mm
)
299.1651 326.9944
0 -10
906.7718 -20
1829 -30
1811 -40
303.8033 10
1222 20
2029 30
2043 40
Figure 3.27: Experimental Results of Rotating the Sonar 5 .
Figure(3.28) on Page 57 shows the comparison of two wall materials
working with the sonar sensors. The upper figure is the new material and it
shows the sonar values are increased and decreased with a slow slope. The
lower figure is the old material and it shows the sonar will always lose the
reflected wave which will cause the maximum sonar values to be returned. In
this control application a wall built by the second material will be used to
improve the controllability of the system.
56
Page 67
3.4 Testing the Communication Block and Analyzing the ServerInformation
0 20 40 60 80 100 120 140-1000
0
1000
2000
3000
4000
5000
6000
7000
Time
Val
ueSonar 5 And Theta
SonarTheta
0 20 40 60 80 100 120 140 160-1000
0
1000
2000
3000
4000
5000
6000
7000
Time
Val
ue
Sonar 5 And Theta
SonarTheta
Figure 3.28: Comparison of the Sonar Sensor Reflection with Two Materials.
57
Page 68
Chapter 4
A Real-Time Control
Application for the AmigoBot
In preceding chapters the AmigoBot’s communication block and its functions
were introduced. In this chapter a control application will use the developed
communication model to control the AmigoBot following a wall with a certain
distance. In the following sections the mathematic model of the robot, the
state space control system, the control loop of the AmigoBot’s controller and
the test of the controller will be explained.
4.1 Mobile Robot Control
The main part of the following section is taken from [2]. The reason of in-
cluding this section is in order to clarify the basic control model of a mobile
robot. The motion of a typical mobile robot can be controlled by setting the
velocities (v1, v2) of each of the two main wheels. With constant v1, v2 the
center of the robot moves with speed v = 12
(v1 + v2) on a circle that has its
center on the wheel axis, see Figure(4.1) on Page 59.
v1 = r1ω Left Wheel Speed
v2 = r2ω Right Wheel Speed (4.1)
The speed of rotation ω = θ of the robot is thus given by
θ =v2 − v1
r2 − r1
(4.2)
58
Page 69
4.1 Mobile Robot Control
b
r1 r2
v1
v2
L
Center Of Turn
Reference
Direction
Figure 4.1: Rotational Motion of Robot
Assume the average wheel velocity is v and introduce the control variable u
then two velocities can be expresses as:
v1 = v − u (4.3)
v2 = v + u (4.4)
Thus:
θ =2
bu (4.5)
where b is the wheel base.
x = v cos θ
y = v sin θ (4.6)
Equation(4.6) is a linear first order differential equation relating the orientation
θ of the robot to the control variable u. To get a full description of the robot
motion, the translational motion also needs to be considered, which is depicted
in Figure(4.2) on Page 60. Here v can be viewed as a constant, which was
chosen in Equation(4.3). As the distance of the robot from the x-axis will be
controlled, the x-equation is not important thus only two differential equations
are useful. These equations can be put into the form of a state space system.
59
Page 70
4.1 Mobile Robot Control
Y
X
.
X
.
Y
V
Figure 4.2: Translational Motion of Robot
More details about the state space system will be given in the next section.
Here the state vector x = (x1, x2) = (θ, y) is chosen.
x1 =2
bu (4.7)
x2 = v sin x1 (4.8)
y = x2 (4.9)
Here b and v are given constants. This is the so called state space description
of a robot system from ([2]).
4.1.1 State Space System Basics
This section begins by considering the purpose and advantages of using the
state-space design. The advantage of using the state-space control for a mobile
robot is the mathematic model of the robot is a state-space system. In state-
space design, the control engineer designs a dynamic compensation by working
directly with the state-variable description of the system, see [5]. From this
point of view, the idea of state space comes from the state-variable method
of describing differential equations. In this method the differential equations
describing a dynamic system are organized as a set of first-order differential
equations in the vector-valued state of the system. The state-space represen-
60
Page 71
4.1 Mobile Robot Control
tation for a system of linear differential equations is given by the equations:
x(t) = Ax(t) + Bu(t) (4.10)
y(t) = Cx(t) + Du(t) (4.11)
where x is an n by 1 vector, representing the state (commonly position and
velocity variable in mechanical systems), u is a scalar, representing the in-
put (commonly a force or torque in mechanical systems), and y is a scalar
representing the output. The matrices A (n by n), B (n by 1), and C (1
by n) determine the relationships between the state and input and output
variables, see [11]. Figure(4.3) shows the basic structure of a state-space
B
A
C
D
∫+
+ +
+yu
Figure 4.3: A State Variable Control System
system. Note that there are n first-order differential equations. State-space
representation can also be used for systems with multiple inputs and outputs
(MIMO), but here a single-input, single-output (SISO) systems will be used
for the AmigoBot.
4.1.2 State Space System of the AmigoBot
In this section how to start the state-space control of the AmigoBot will be
given. Equation(4.9) shows the two-wheeled mobile robot itself is a state space
system so the state space control can be used to control this system. From
the introduction in the previous section the first step for a state space control
system is to find the control matrices: A,B,C,D and the state variable. The
Equation(4.9) shows for a two-wheeled mobile robot: x= [ θy ] which is the set
of state variables for the system (a 2x1 vector), u is the input(the difference
of the wheel speed), and y is the output (the robot’s position in the Y axis).
These equations describe that this robot system is a nonlinear system as there
is a sin() function in the equations. As known when the θ is very small the
61
Page 72
4.1 Mobile Robot Control
sin(θ) can be assumed equal θ. In order to simplify the system the sin(θ) will
be linearized to θ. From the linearized equation the system matrix A, the
input matrix B, the output matrix C and the feed throw matrix D have the
following values:
A =
[0 0
v 0
]
B =
[2bu
0
]
C =[0 1
]
D =[0]
To discover how the AmigoBot system functions, the A,B,C,D and the con-
stants b,v have to be entered into an m-file. As explained before this system is
linearized by assume that the robot will not move more than a few degrees away
from the horizontal which makes sin(θ)≈θ. Figure(4.4) is the non-linearized
Theta
Y
2X
1State Variable
cos
sin
1s
1s
1s
STARTSPEED
2/WIDTH
STARTSPEED
1u
Figure 4.4: Non-linearized Mathematic Model of The AmigoBot.
mathematic model of the AmigoBot. The next step of building the control
system is to compare the behavior of the open loop of the linear system and
the nonlinear system by giving the same input u=10. Figure(4.5) on Page 63
shows the different behavior of the linearized and non-linearized model of the
AmigoBot. The non-linearized model shows the real action of the robot: the
robot will move along a circle. The linearized model only works like the real
action of the robot when the θ is very small. When the θ becomes greater the
system will become disturbed. But notice for both cases the output of the sys-
tem is an unstable value which has to be controlled later. In this application
the linearized model will be used in the first phase in order to easily find the
gain of the controller. But the final simulation model is build by replacing the
linearized model with the non-linearized model.
62
Page 73
4.2 Design of the Control Loop of the AmigoBot
0 10 20 30 40 50 60 70 80 90 100-1000
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
Time
Val
ue
Compare The Linear And Non-Linear Model of The Robot
Non-Linear YNon-Linear ThetaLinear ThetaLinear Y /10
Figure 4.5: Linearized and Non-linearized Model of the Open loop Control ofthe AmigoBot
4.2 Design of the Control Loop of the AmigoBot
In this section a state-space controller will be built for the AmigoBot. At first
the interface of the final simulation model will be given and then how to build
this interface will be explained step by step.
4.2.1 Building the Simulation Model
Controller Robotyr yu
-
Figure 4.6: Standard Control Loop for the Mobile Robot.
The control loop for making the robot follow a track with a certain
distance is shown in Figure(4.6). In control theory the object to be controlled
63
Page 74
4.2 Design of the Control Loop of the AmigoBot
is called the plant, here the plant is the robot. u is the actuating signal, plant
input. yr is the reference or command input. y is plant output and measured
signal. This system is a feedback control system. The most elementary feed-
back control system has three components: a plant, a sensor to measure the
output of the plant and a controller to generate the plant’s input,see [8]. The
basic problem of control design is to choose a suitable controller to obtain a
control loop with acceptable performance. This in particular means that the
control loop should be stable, which means that the control error must be
reduced to zero, at least after some transients. Now the problem is how to
find the controller gain K which will be suitable for the application:
u = K ∗ x =[K1 K2
] ∗[θ
y
]
where state variable:
x =
[θ
y
]
goes to 0.
To implement this controller, a MATLAB simulation model is built to
find the best controller gain K. One of the first things to do with controller
gain K is to find the poles of the system; these are the values of s where det(sI
- A) = 0, or the eigenvalues of the A matrix. Take Laplace transforms with
zero initial conditions on x:
sx(s) = Ax(s) + Bu(s)
y(s) = Cx(s)
Now eliminate x(s) to get:
y(s) = C(sI − A)−1Bu(s)
and the transfer function from u to y:
G(s) = C(sI − A)−1B
This transfer function is strictly proper. From the representation
G(s) =1
det(sI − A)Cadj(sI − A)B
64
Page 75
4.2 Design of the Control Loop of the AmigoBot
it should be clear that the poles of G(s) are included in the eigenvalues of A,
see [8]. For the robot the eigenvalues of A are:
ev =
[0
0
]
As mentioned in the open loop control system this system is unstable.
The stability of a feedback system is related to the location of the roots of
the characteristic equation of the system function. Stability in control theory
means that for any bounded input over any amount of time, the output will
also be bounded. Mathematically, that means for a system to be stable, all the
poles of its transfer function must lie in the left half of the complex plane. Or
more simply put, the real part of every complex number that makes the transfer
function become infinite, has to be negative for the whole system to be stable,
see Routh-Hurwitz Stability Criterion in [7]. As seen the eigenvalues of the A
matrix are not in the left half of the complex plane, this proves that the robot
system is unstable. Figure(4.7) starts to build a controller for the system.
u Y0
yr
simout
To Workspace
x' = Ax+Bu y = Cx+Du
State-Space
Ks* u
K
C* u
C
Figure 4.7: Building a Controller for the System.
The schematic of a full-state feedback system is the following: Recall that
the characteristic polynomial for this closed-loop system is the determinant
of (sI-(A-BK)). Since the matrices A and B*K are both 2 by 2 matrices,
there will be 2 poles for the system. The MATLAB function place() will be
used to find the desired control matrix K. Unlike the classical design, where it
iterated on parameters in the compensator to find acceptable root locations,
the full state feedback, pole-placement approach guarantees success and allows
choosing arbitrarily root locations, providing that n roots are specified for an
nth-order system, see [6]. In this thesis the following poles’ values are used to
see if this approach will work.
poles = [-1.6 -1.601]; K = place(A,B,poles);
65
Page 76
4.2 Design of the Control Loop of the AmigoBot
All the explanation above shows the control system for the AmigoBot
is a very simple state-space control. To test the linear simulation result the
initial value of the state variable is set to (0.01,10). Figure(4.8) is the result
0 1 2 3 4 5 6 7 8 9 10-4
-2
0
2
4
6
8
10
Time
Val
ue
Linear Simulation Results
YTheta * 57.3 (degrees)
Figure 4.8: Linear Simulation Results.
of the linear simulation, it shows that with the help of the controller gain
both state variables return to zero. This figure also shows the response time is
fast enough and the control error is small enough. Normally for a state-space
control the overshoot and response speed are depending on the chosen values
of the poles. If a smaller overshoot is required, placing the poles further to the
left can result in the transient response improving (this should also make the
response faster). In this thesis the poles are always real values, so there will
be no influence with the overshoot of the system. Only the response speed
of the system can be changed by choosing different poles. Normally a control
system is required to have a reference input, for example a step function. This
is realized by adding a reference gain Nv in front of the input u. The reference
gain is calculated as following, see [10]:
Nv = -1.0/(C*inv(A-B*Ks)*B);
66
Page 77
4.2 Design of the Control Loop of the AmigoBot
u Y simout
To WorkspaceStep
x' = Ax+Bu y = Cx+Du
State-Space
K*uK
Nv
Gain
C* u
C
Figure 4.9: Linear Model with a Reference Input
Figure(4.9) shows the linear model with a reference input. Figure(4.10) shows
the simulation results of sending a step function to the system. This figure
shows the final output will not be zero any more but like the reference input
is a step function.
0 10 20 30 40 50 60-200
-180
-160
-140
-120
-100
-80
-60
-40
-20
0
Time
Val
ue
Linear Simulation Results with Reference Input
YReference Input
Figure 4.10: Simulation Result of the Linear Model with a Step ReferenceInput
At this point everything looks fine and it seems the control system is
finished, but there is one other problem , in the case where not all the states
of x can be measured. Actually for most systems not all the states of x can be
measured and they have to be estimated by an observer. For the AmigoBot’s
controller the same problem occurs. In the AmigoBot control application, the
67
Page 78
4.2 Design of the Control Loop of the AmigoBot
only value which can be used is the sonar sensor value and this value can
be translated into the state x2. Figure(4.11) shows that from the detected
WAll
7,5 cm
-10,5 cm
S5Y=S5+10,5
X
Y
7,5 cm
-10,5 cm
S5'Y’=S5'+10,5
X
Y
Figure 4.11: Derivation of Y Values From The Sonar 5
sonar sensor values during the movement of the robot, the Y position of the
robot can be calculated(e.g. ∆ Y=Y’-Y ). For the state x1, how can the θ be
retrieved? The solution is to use an observer to estimate the state x1. The
observer is basically a copy of the plant; it has the same input and almost
the same differential equation, see [9],[10]. An extra term compares the actual
measured output y to the estimated output y; this will cause the estimated
states x to approach the values of the actual states x. The error dynamics of
the observer are given by the poles of (A-L*C). To construct an observer, the
observer gain L has to be chosen by the place() function. If the observer needs
to be faster than the system itself, the poles have to be set farther to the left
than the dominant poles of the system. In this application an observer which
is twice as fast as the system has been used in the first instance.
op = 2*clp;
L = place(A’,C’,op);
L = L’;
68
Page 79
4.2 Design of the Control Loop of the AmigoBot
B
A
C
D
∫+
+ +
+y
uNv
in
B
A
C∫+
+
Ks
L
Observer
^
x
^
y
~
y
-
x.x
Figure 4.12: State-Space Control with Observer
Figure(4.12) shows the state-space control system with the observer. At
this point almost all the simulation tasks are finished, the last step is placing
the nonlinear model of the robot to the system and to check how the controller
works. Figure(4.13) shows the final nonlinear model of the AmigoBot. This
u Y
StepScope
u_in
y_in
x^
~ y
Observer
Nv
Gain
K*uController Ks
C* u
Cu
State Variable
X
Amigo Simulator
2
2
2
Figure 4.13: The Final Nonlinear Model of the AmigoBot
nonlinear model includes a reference input and an observer. The linear model
of the AmigoBot is also replaced by the nonlinear model of the AmigoBot.
Figure(4.14) on Page 70 shows the simulation result of the system with a
reference step input. This figure proves that the observer and controller gain
K also work with the nonlinear model of the mobile robot.
69
Page 80
4.2 Design of the Control Loop of the AmigoBot
0 5 10 15-35
-30
-25
-20
-15
-10
-5
0
5
Time
Val
ue
Final Simulation with a Step Input
Y /10Reference Step Function /10ThetaEstimate Y /10Estimate TheataError Yu/10
Figure 4.14: Simulation Result of Sending a Reference Step Function to theFinal Nonlinear Model of the AmigoBot
4.2.2 Building the Real-Time Control Model
In the previous section the simulation model of the AmigoBot’s controller
has been introduced. From this section the real-time control model of the
AmigoBot’s controller will be realized. In the real-time control model the
sonar sensor 5 will be used to measure the distance from the robot to the
wall. The measured value translates to the corresponding y position of the
robot and is sent to the observer. Figure(4.15) shows the final structure of
1y
SaturationRamp
Enable
ReferenceInput
y_in
u
Observer & Controller
u
Enable
y
AmigoBot Plant
Reference Input
Figure 4.15: The Top Level of the AmigoBot’s Final Control System
the AmigoBot’s control system in real time. Compare this structure with the
70
Page 81
4.2 Design of the Control Loop of the AmigoBot
standard control loop for a mobile robot shown in Figure(4.3) there are several
differences:
• An ”Enable” switch is added to the observer. Why this switch was
added and it functions, will be introduced when the subsystems of this
final structure is explained.
• A ramp function is set as the reference input instead of a step function.
The reason of using the ramp function is that it is easier to control during
the edge part of the function than the step function.
• The y position is input to the system separately with the reference value.
1u
Enable
y_in
u_in
x^
Observer
Nv
K*u
ControllerKs
3y_in
2ReferenceInput
1Enable
Figure 4.16: Subsystem Observer and Controller
Figure(4.16) shows the subsystem ”Observer And Controller”. In this figure
there is nothing but a controller gain Ks, a reference gain Nv and an observer.
It is the basic control part of the system. The observer used in this subsystem is
using the same structure as the Figure(4.12) but an additional switch is added
to control the observer as shown in Figure(4.17) on Page 71. The function of
1
x^
Product
L* u
L
1s
Integrator
C* u
C1
B* u
B
A* u
A
3u_in
2y_in
1Enable
Figure 4.17: Sub Subsystem Observer
this switch will be introduced in the next section.
71
Page 82
4.2 Design of the Control Loop of the AmigoBot
2y
1Enable
SonarIndex
SonarRange
Enable
y
Protection & Position Translation
uRight
Left
Give Speed
Right
Left
SonarIndexB
SonarRangeB
AmigoBot Plant
1u
Figure 4.18: Subsystem AmigoBot Plant of the Final Control System
Figure(4.18) shows the subsystem ”AmigoBot Plant” of the final control
system. This sub system is composed of three parts:
1. Sub subsystem ”Give Speed”: This block, depends on the input u and the
initial average speed of the robot STARTSPEED. The speed of the left
and right wheels will be output to the sub subsystem ”AmigoBot Plant”.
Inside this block, two additional functions are created: First a saturation
block is added to limit the speed of the robot. Second a control variable
WALLINRIGHT is set to decide the moving direction of the robot
(e.g. WALLRIGHT=1 means the wall should be on the right of the
robot.WALLRIGHT=0 means the wall is on the left).
2. Sub subsystem ”AmigoBot Plant”: In this block the communication
block created for the AmigoBot as shown in the Figure(3.2) is used.
3. Sub subsystem ”Protection and Position Translation”: In this block two
functions are implemented:
• Firstly, outputting y position of the robot. This is calculated by
minus the initial sonar value from the received value from the sonar
sensor which connects to the input ”SonarRangeB”.
• Second is to check if the received value is the one the observer
needed. The reason for creating this function is that sometimes the
sonar sensor will return a erroneous information to the system. The
reason for this and how to solve this problem have already been ex-
plained in the previous section. The experiment shows that chang-
ing the wall material helps a lot for the sonar sensor but sometimes
the problem still occurs. For any control system, if the measured
value is incorrect, the control system won’t work properly. Now a
new problem occurs: what to do in the case of the measured value
being incorrect? The solution is that the wrong value should be fil-
tered out and not input to the observer. The protection functions
72
Page 83
4.3 Experimental Verification of the Robot Controller
of this block will first check if the sonar index is the one required for
the observer and then check if the measured value is a reasonable
value. If the measured value is the correct value, then it is sent to
the observer. If this is not true an ”Enable” switch will switch off
the observer gain L and let the observer use only the old estimated
state variables until the switch is switched on again. Figure(4.19)
2y
1Enable
SONARINDEX100B
>=
==AND
SONARLIMITATION
Limitation
DISTANCE
Initial Sonar Value
auto(double)
2SonarRange
1SonarIndex
Figure 4.19: Sub Subsystem Protection and Position Translation
shows how the sub subsystem ”Protection and Position Transla-
tion” works.
4.3 Experimental Verification of the Robot Con-
troller
In this section some experiments will be done to test how the control model
works. The procedure of the experiment is first to prepare a wall track for the
AmigoBot. The task of the robot is to move with a distance of 500mm to the
track at the beginning and then the robot should move near to the track with
a distance of 300mm. Figure(4.20) on Page 74 shows the track prepared for
this experiment. As mentioned before, a MATLAB m-file is used to setup the
control parameters of this control system. In the simulation model the closed
loop poles are set to [-1.6 -1.601] and the observer is twice as fast as the closed
loop poles.
The requirement of the control system is to let the robot move alone
the given track with a distance exactly like the input reference step function.
This requirement is very difficult to reach and in most cases the robot will
73
Page 84
4.3 Experimental Verification of the Robot Controller
Pi*r=2000mm
R=636.6mm
r=636.6mm
l=2000mm
500mm
300mm
Figure 4.20: The Track for the AmigoBot.
move almost like the step function. In the above experiment, the robot is
first put into the starting position. The distance between the starting point
and the wall is 500mm. The robot’s sonar sensor 5 should be located just
above the start point. The synchronization and initialization process of the
robot need to use 10 seconds. During the synchronization and initialization
process, the green system and amber user LEDs on the AmigoBot will indicate
the activities of the AmigOS. How these LEDs indicate the activities of the
AmigOS can be seen in [1]. Once the synchronization and the initialization
process is finished the AmigoBot will generate a sound ”Connected” which
indicates to the user that the process is completed. In the next 10 seconds the
AmigoBot will try to move alone the track at a distance of 500mm. During
the time 20 to 30 seconds the AmigoBot will move near to the wall until at a
distance of 300mm. In this time period the robot should move according to a
ramp function like the ramp part of the given step function. After 30 seconds
the robot should always try to keep a distance of 300mm to the track. If the
track is a straight one then the robot should move forward in a straight line.
If the track is a circle then the robot should also move along the circular track.
The behavior of the robot is shown in Figure(4.21) on Page 75. Exam-
ining the Figure(4.21), the control loop takes its effect on the robot and lets
the robot move in the proposed way. After the control loop starts, the robot
is not located exactly on the start point but a little bit nearer. The controller
immediately finds out the distance is less than 500mm so it will give a positive
u to the robot which means decrease the left wheel speed and increase the
right wheel speed. This control command will let the robot turn right and
74
Page 85
4.3 Experimental Verification of the Robot Controller
0 20 40 60 80 100 120-200
-100
0
100
200
300
400
500
600
Time
Val
ue
Sonar 5 And Theta And U
SonarThetaUStep
Figure 4.21: Experiment A: The Received Sonar,Theta,U and the Given InputInformation.
make the distance larger. It is very difficult to make the robot move exactly to
the expected position and keep the distance of 500mm to the track. Normally
the controller will keep sending the old command which will lead the distance
to be larger than 500mm. After a short while the controller discovers that the
distance is larger than the expected one and will let the robot move nearer to
the track. This situation will go on and the moving track of the robot will
oscillate around the 500mm distance line. This behavior is very normal for the
control system, for a control system there is always some basic requirement
like the control error and response time. In this application the required con-
trol error should be less than 40mm and the response time should be as fast as
possible. Here, except the controller itself, the robot also has some influence
on the final control result. Except the already explained sonar sensor problem
there are still some problems coming from the robot which will influence the
control. Here two more problems will be explained.
• The quantization problem of the wheel speed. The wheel speed of the
AmigoBot can only be set with a unit of 40mm/sec. This means if the
75
Page 86
4.3 Experimental Verification of the Robot Controller
control input u is a small value, it will not have any effect on the system.
For example the robot is just 2∼3mm away from the desired distance,
and the input u may have a value of 5∼10. The average speed of the
wheels is 200mm/sec. Now the new calculated left wheel speed will be
195mm/sec. This value is an arbitrary value of the controller, the actual
speed sent to the AmigoBot will be quantized to 200mm/sec which means
nothing changes the system at this moment. This means an immediate
reaction from the robot only occurs when the absolute value of the input
u is greater than 20. If this situation happens the robot will always keep
this distance of 302 303mm to the track. This problem can be solved
by using a larger pole or faster observer but if the large pole or faster
observer is used then the system will become more unstable. Whether
using a large pole to solve the quantization problem or using a small
pole to keep the system more stable depends on different applications.
In this application a more stable system is more important.
• The operating system problem of the AmigoBot. The AmigOS can only
send the SIP every 50 or 100 milliseconds and accept the client com-
mand every 20 milliseconds. In this application the required sampling
rate of the control model is 100 milliseconds so the SIP will be received
only every 100 milliseconds and the client command will also be sent
every 100 milliseconds. When working with this sampling rate the con-
trollability of the control system will be limited. The reason is that the
feedback information will come in every 100 milliseconds and the con-
troller will send the control information every 100 milliseconds but in
this 100 milliseconds the position of the robot is already changed. For
example assume the average speed of the robot is 200mm/sec and the
input u is exactly 40, which means in the next 100 milliseconds the left
and right wheel speed of the robot is 160mm/sec and 240 mm/sec. This
controller input will lead the robot to move along the x position about
20mm, the y position about 2mm and the theta turns left about 1.91
degree. These values are calculated from the mathematical model of the
system. They are smaller than the actual value because there is an ac-
celeration time (The maximum allowable translational (de)acceleration
is 4000 mm/sec). In 100 milliseconds the x position of the robot changes
about 20mm if the track is not a straight one but a circle, and the actual
76
Page 87
4.3 Experimental Verification of the Robot Controller
distance to the track will change a lot. This will mean the next coming
sonar sensor value may be less or more then the expected value.
All these problems will influence the control of the system. As shown in the
experiment, if the robot following the straight track and the distance is just
2∼3mm less or more than 300mm the robot will keep the distance. Only the
difference between the desired value and the actual value is large enough such
that the controller will take effect. In the above experiment during the time
36 to 58 seconds the robot is following a half circle track. The figure shows
in this period the measured distance is always smaller than 300mm. This is
caused by the slow sampling rate of the model. For example once the robot
finds the distance is 275mm then the controller will allow the robot to move a
further 2mm from the track, but at the same time the robot will move forward
about 20mm which makes the distance 5mm smaller. In the next sample time
the distance becomes 273mm, the controller will allow the robot to move a
further 4mm from the track but the final distance will be 272mm. This means
the input u is not strong enough and the robot will move nearer to the track.
During this period the input u becomes stronger as the distance is shorter.
Now there are two things influencing the robot’s distance to the track, the
input u will let the robot move further to the track and the forward speed
of the robot lets the robot move nearer to the track. Once the effort from
the input u is larger then the forward speed, the robot will move finally far
away from the track. This is the explanation of why during the time 36 to 58
seconds the distance is lese then 300mm and always oscillating.
Figure(4.22) on Page 78 shows the result of the Experiment B. The
difference between the experiment A and B is the setup of the control vari-
ables. In Experiment A the poles are set to [-1.6 -1.601] and the observer is
twice as fast as the closed loop poles. In Experiment B the poles are set to
[-1.75,-1.751] and the observer is twice as fast as the closed loop poles. Com-
pare the Figure(4.21) and Figure(4.22) the differences are that the system of
Experiment B has a faster reaction then that of Experiment A and during the
circle track part the average distance of Experiment B is nearer 300mm than
Experiment A. From the controlling view of the system, Experiment B has
more oscillations which means not so easy to control.
Figure(4.23) on Page 79 shows the result of Experiment C. In Exper-
iment C the poles are set to [-1.75,-1.751] and the observer is 4 times faster
than the closed loop poles. The figure shows during the half circle track part
77
Page 88
4.3 Experimental Verification of the Robot Controller
0 20 40 60 80 100 120-200
-100
0
100
200
300
400
500
600
Time
Val
ue
Sonar 5 And Theta And U
SonarThetaUStep
Figure 4.22: Experiment B: The Received Sonar,Theta,U and the Given InputInformation.
the distance can be controlled at nearly 300mm but the system is always os-
cillating. From these experiments the following conclusion can be generated:
Placing the poles further left to the complex plane or using a faster observer
will lead to a faster response but will cause difficulties of the control of the
system. For every control system there may be different requirements so how
to choose the best setup of the controller to serve for the applications will be
done by simulations and the test of real time behavior.
At this point, nearly all the tasks of this thesis are finished: The com-
munication model for the AmigoBot based on the xPC Target is proved to be
very stable. The real-time control model to let the AmigoBot follow a track is
also working now. In the next chapter some conclusions and suggestions will
be given.
78
Page 89
4.3 Experimental Verification of the Robot Controller
0 20 40 60 80 100 120-800
-600
-400
-200
0
200
400
600
Time
Val
ue
Sonar 5 And Theta And U
SonarThetaUStep
Figure 4.23: Experiment C: The Received Sonar,Theta,U and the Given InputInformation.
79
Page 90
Chapter 5
Conclusions and Suggestions for
Future Work
5.1 Conclusions
This thesis has investigated the possibility of building a real-time control model
for a mobile robot using MATLAB.
In Chapter 2, the use of the xPC Target from MATLAB and the
AmigoBot from ActivMedia to support this real-time control application have
been introduced in the beginning of the chapter. The main topic of this chap-
ter is the design of a communication model for the AmigoBot which works
on the xPC Target. The design process starts with analyzing the communi-
cation protocol of the AmigoBot and how to connect the xPC Target to the
AmigoBot. Finally an interface of the AmigoBot’s communication block was
created. This interface will include the inputs and outputs of the commu-
nication system. These inputs and outputs were used in the control model
later.
In Chapter 3, the task of implementing the AmigoBot’s communication
block was realized. The communication block of the AmigoBot was divided
into three parts:
• The first part was used to finish the synchronization and initialization
task of the communication process. This process works like a state ma-
chine because the AmigoBot’s synchronization process is built by send-
ing and receiving three synchronization packets. In this part some tests
80
Page 91
5.1 Conclusions
were done to research the behavior of the AmigoBot and to find the prob-
lems during the synchronization and initialization process. A flowchart
was created to describe the property of the state machine. The final
”Synchronization And Initialization” model was built by following the
flowchart.
• The second part was used to decode the Server Information Packet re-
ceived from the AmigoBot. In this part some S-Functions were created
to help decode several useful information sets from the whole received
SIP. As the received information may be not the real physical value of the
system some conversions were done in order to output the real physical
values to the user.
• The third part was used to set the speeds of both wheels of the AmigoBot.
The main functionality of this part was to judge whether the input speed
was negative or positive and then to use the corresponding command to
generate the client command which was sent to the AmigoBot.
At the end of this chapter some experiment were done in order to check if this
communication block worked. By analyzing these experiment the features of
the AmigoBot were also discovered.
In Chapter 4, a real-time control application was designed and imple-
mented. This application allow the AmigoBot to move following a wall with
a certain distance. This distance can be a constant or a mathematic func-
tion(like a step function). The wall can be a straight or curve one. In the
beginning, a mathematic model of the robot was created and the state-space
control system was used to control the AmigoBot. A simulation model was
used at first to test the action of the system, some desired control variables
were discovered by using this simulation model. When using these control vari-
ables on the AmigoBot some problems occurred and some of these variables
had to be corrected. Some experiments were done to indicate the influence of
different control variables and how these variables were changed to reach the
requirement of the system.
During the whole work of this thesis new problems constantly arose
and solutions for these problems were also discovered. Here the problems and
solutions for this application will not be mentioned again. In the next section
some suggestions for the future work will be given.
81
Page 92
5.2 Suggestions for the Future Work
5.2 Suggestions for the Future Work
In Chapter 4 some experimental results showed that the control part of the
system still can be improved. Here, some suggestions about how to improve
the controller of the system will be given. As explained in the previous section
the AmigoBot can send its SIP every 50 milliseconds or 100 milliseconds. The
communication block of this application is only designed for receiving SIPs
every 100 milliseconds. A model which works with 50 milliseconds will improve
the controllability of the system, the reason is that the sonar information can
be detected twice as fast as the 100 milliseconds system. This is one way
to improve the controllability of the system. Another way to improve the
controllability of the system from a hardware point of view is to try to find a
better material than the one used now. This can improve the quality of the
sonar sensor value. From the view of control theory, the robot needs to use
faster poles during the circle part of the track and slower poles if the track is
straight. An improvement from this view is to use two controllers: one for the
circle part and the other for the straight part. A detector has to be created to
find out at which point to use the faster controller and when to use the slower
one.
Another suggestion from the application side, is that a ”robot following”
application can be created, which means one robot follows another robot. The
interesting point of this application is that two sonar sensors can be used
together and the robot can move more flexibly than following a track which
needs much more places.
82
Page 93
Appendix A
AmigOS Command Set
Command Nr Args Description
Before Client Connection
SYNC0 0 none Start connection; echoes
SYNC1 1 none synchronization commands
SYNC2 2 none back to client.
After Established Connection
PULSE 0 none Client pulse resets watchdog
OPEN 1 none Starts the controller
CLOSE 2 none Close client-server connection
POLLING 3 string Set sonar polling sequence
ENABLE 4 int Enables/disables the motors
SETA 5 signed
int
Sets translation acc/ deceleration;in
mm/sec2
SETV 6 int Set maximum translation velocity
(mm/sec)
SETO 7 none Resets server to 0,0,0 origin
SETRV 10 int Sets maximum rotational velocity; in de-
grees/sec
VEL 11 int Move forward (+) or reverse (-) at
mm/sec
continued on next page
83
Page 94
continued from previous page
HEAD 12 int Turn to absolute heading; 0-359 degrees
DHEAD 13 int Turn relative to current heading; ± de-
grees
SAY 15 int,string Sound duration (20 ms increments)/tone
(half-cycle) pairs; int is string length
CONFIG 18 int Request configuration SIP
ENCODER 19 int Request continuous (¿0) or stop sending
(=0) encoder SIPs
RVEL 21 signed
int
Rotate at ± degrees/sec
DCHEAD 22 int Colbert relative heading setpoint; ± de-
grees
SETRA 23 int Sets rotational (±)de/ acceleration in
mm/sec2
SONAR 28 int Enable (1) or disable (0) the sonars
STOP 29 none Stops robot (motors remain enabled)
DIGOUT 30 int Msbits is a byte mask that selects output
port(s) for changes; lsbits set (1) or reset
(0) the selected port.
VEL2 32 int Independent wheel velocities; lsb=right
wheel; msb=left wheel; AmigOS in
2cm/sec increments
GRIPPER 33 int Pioneer Gripper server command. See
the Pioneer Gripper manuals for details.
ADSEL 35 int Select the A/D port number for analog
value in SIP. Selected port reported in
SIP Timer value.
GRIPPERVAL 36 int P2 Gripper.
IOREQUEST 40 int Request an IOpac. Set argument=1 for
a single packet; ¿1 for a packet each info-
Cycle; 0 stop continuous packets
continued on next page
84
Page 95
continued from previous page
PTUPOS 41 int Msb is the port number (1-4) and lsb is
the pulse width in 100µ sec units PSOS
or 10µ sec units P2OS
TTY2 42 string Send string argument to serial device con-
nected to AUX port on micro controller
GETAUX 43 int Request to retrieve 1-200 bytes from the
aux serial channel; 0 flushes the aux serial
input buffer.
BUMPSTALL 44 int Stop and register a stall if front (1), rear
(2) or either (3) bump-ring contacted.
Off (default) is 0.
TCM2 45 int TCM2 Module commands; see P2 TCM2
Manual for details.
E STOP 55 none Emergency stop, overrides deceleration
STEP 64 none Single-step mode (simulator only)
TTY3 66 String Send string argument out to serial device
connected to AUX2 serial port
GETAUX2 67 int Request to retrieve 1-200 bytes from the
AUX2 serial port; 0 flushes the buffer.
ROTKP 82 int Change working rotation Proportional
PID value (not FLASH default)
ROTKV 83 int Change working rotation Derivative PID
value (not FLASH default)
TRANSKP 85 int Change working translation Proportional
PID value (not FLASH default)
TRANSKV 86 int Change working translation Derivative
PID value (not FLASH default)
TRANSKI 87 int Change working translation Integral PID
value (not FLASH default)
REVCOUNT 88 int Change working differential encoder
count (not FLASH default)
continued on next page
85
Page 96
continued from previous page
SOUND 90 int Play stored sound
PLAYLIST 91 int Request playlist packet for sound number
or 0 for all user sounds
SOUNDTOG 92 int Mute (0) or enable (1) sounds
Table A.1: AmigOS Command Set
86
Page 97
Appendix B
Initial File
An example of the initial file, changing the value of these factors will let the
model works more flexible.
% Declare Constants To initialize the model
% Used for the application 50ms, Change this to get the required
% sonar range e.g SONARINDEX50=5 means the model will output
% the value of sonar 5 at output port SonarRange
% only value 0,1,2,3,4,5,6,7 can be chosen
SONARINDEX50=5;
% Used for the application 100ms
% e.g SONARINDEX100A=4 means the model will output the value of
% sonar 4 at output port SonarRangeA
% only value 0,2,4,6 can be choosen
SONARINDEX100A=4;
% Used for the application 100ms
% e.g SONARINDEX100B=5 means the model will output the value of
% sonar 5 at output port SonarRangeB
% only value 1,3,5,7 can be chosen
SONARINDEX100B=5;
% Speed factor of the model
% SPEEDFACTOR=0.025 means the input speed in the unit of mm/sec
% SPEEDFACTOR=1 means the input speed in the unit of 4cm/sec
SPEEDFACTOR=0.025;
87
Page 98
% SIP factors, these factor is used to convert the received SIP
% information to the real physic values
XPOSITIONFACTOR=0.5083;
YPOSITIONFACTOR=0.5083;
THETAFACTOR=0.001534;
WHEELSPEEDFACTOR=0.6154;
% Sonar Sequence factors, used to set the sonar polling sequence
% Values can be set: 1,2,3,4,5,6,7,8
SEQUENCE1=6;
SEQUENCE2=6;
SEQUENCE3=6;
SEQUENCE4=6;
SEQUENCE5=6;
SEQUENCE6=6;
SEQUENCE7=6;
SEQUENCE8=6;
%These factors are used to set the initial values to
%the SonarRangeA and SonarRangeB
SonarRangeA=500;
SonarRangeB=500;
88
Page 99
Appendix C
Control Parameter Setup File
% control loop
% getting started
% Declare Constants
WIDTH = 240;
STARTSPEED= 120;
DISTANCE=500;
NEWDISTANCE=300;
STEPTIME=20;
SONARLIMITATION=1000;
WALLINRIGHT = 1;
%
% Part I. Setup base data for the linear model and
% show that the open loop plant is unstable.
% create state space matrices for plant (output state 2 value)
A = [ 0 0;
STARTSPEED 0 ];
B = [2/WIDTH;0];
C = [0 1];
D = [0];
disp(’State Space Matrices for the Plant’)
89
Page 100
A, B, C, D
%
% compute eigenvalues of state matrix for open loop plant
disp(’Eigenvalues of the "Open Loop Plant"’); ev = eig(A)
%
%
% Part II. Add state feedback control to stabilize
% the system and simulate system behavior for a step
% change in the state 2 reference point.
% check for full state controllability
disp(’Controllability Matrix for this system’), M = ctrb(A,B)
disp(’Rank of Controllability Matrix’), rank(M)
%
% calculate state feedback gains for specified closed loop poles
clp = [-1.75 -1.751];
Ks = place(A,B,clp);
disp(’Desired closed loop poles for state feedback controller’);
clp
disp(’State feedback gains needed to give desired poles’);
Ks
disp(’Calculated eigenvalues of system with state feedback’);
eig(A-B*Ks)
%
% calculate Nv for zero SS error (see derivation in
% notes - next subsection)
Nv = -1.0/(C*inv(A-B*Ks)*B);
%N=(C*((B*K-A)^(-1))*B)^(-1);
disp(’Setpoint gain for zero SS error’); Nv
%
%
% Part III. Add state feedback control and a full observer
% to stabilize the system. Simulate system behavior for a
% step change in the state 1 reference point. This should
% give the same simulation as Part II.
% check for full state observability
90
Page 101
disp(’Observability Matrix for this system’),
H = obsv(A,C)
disp(’Rank of Observability Matrix’),
rank(H)
%
% calculate estimator gains for specified observer poles
% estimator dynamics is 0.5 times faster than closed loop poles
op = 2*clp;
L = place(A’,C’,op); L = L’;
disp(’Desired observer poles for state feedback controller’); op
disp(’Estimator gains needed to give desired poles’); L
disp(’Calculated eigenvalues of estimator system’); eig(A-L*C)
91
Page 102
BIBLIOGRAPHY
Bibliography
[1] ActivMEDIA ROBOTICS LLC: AmigoBOT Technical Manual (version
1.3, November 2002)
[2] Thomas Holzhueter : Signal and Systems 1, Lecture notes University of
Applied Sciences Hamburg, (2004)
[3] The MathWorks: xPC Target For Use with Real-Time Workshop User’s
Guide(Version 2)
[4] The MathWorks: Real-Time Workshop Getting Started
[5] Gene F. Franklin; J. David Powell: Abbas Emami-Naeini : Feedback
Control of Dynamic Systems, 4. ed., Upper Saddle River, NJ : Prentice
Hall,(2002)
[6] Gene F. Franklin; J. David Powell: Michael L. Workman: Digital Control
Of Dynamic Systems, 2. ed., Reading, Mass. : Addison-Wesley, (1990)
[7] Richard C. Dorf: Modern control systems ,R eading, Mass. [u.a.] :
Addison-Wesley, (1992)
[8] John C. Doyle; Bruce A. Francis; Allen R. Tannenbaum: Feedback Con-
trol Theory, New York : Macmillan [u.a.], (1992)
[9] Thomas Holzhueter : Zustandsregelung, Lecture notes University of Ap-
plied Sciences Hamburg, (2004)
[10] Ulf Claussen: Control Systems,Lecture notes University of Applied Sci-
ences Hamburg, (2003)
[11] University of Michigan; Carnegie Mellon University: State Space Tutorial,
(http://www.engin.umich.edu/group/ctm/state/state.html),(2004)
92
Page 103
BIBLIOGRAPHY
[12] Li Fang: Camera based track control for a mobile robot, Master Thesis
University of Applied Sciences Hamburg, (2004)
93
Page 104
INDEX
Index
ActivMedia, 1
AmigoBot, 2
AmigOS Client Command, 18, 44, 83
VEL2, 44
ENABLE, 27, 32, 37
OPEN, 26, 32, 36
POLLING, 27, 31, 36
SYNC0, 22, 25, 32, 34
SYNC1, 22, 32, 35
SYNC2, 22, 32, 36
AmigOS
Amigo Operating System, 2, 3, 7, 14,
16, 26, 74
ARIA, 1
checksum, 15, 16, 37
Communication Packet Protocol, 15
Controller Gain, 64, 69, 71
MATLAB, 1
Observer, 5, 67, 69, 71, 72, 76
Observer Gain, 68, 73
poles, 64–66, 73, 77
Real-Time Workshop, 2, 8, 9, 22
S-Function
System-Function, 9, 10, 16, 34, 38–40,
44, 81
Simulink, 2, 8, 9, 34
SIP
Server Information Packets, 15, 16, 21,
25, 29, 30, 37, 38, 40, 76, 82
State-Space, 4, 60, 61
xPC Target, 2, 7, 34, 78
host PC, 3, 8
target PC, 3, 8
94
Page 105
VITA
Vita
Permanent Address: Germany
This thesis was typeset with LATEX2ε1 by the author.
1LATEX2ε is an extension of LATEX. LATEX is a collection of macros for TEX. TEX isa trademark of the American Mathematical Society. The macros used in formatting thisthesis were written by Dinesh Das, Department of Computer Sciences, The University ofTexas at Austin, and extended by Bert Kay and James A. Bednar.
95