Page 1
EUROPEAN COMMISSION
DG Communications Networks, Content & Technology
SEVENTH FRAMEWORK PROGRAMME
INFORMATION AND COMMUNICATION TECHNOLOGIES
Coordination and Support Action
Grant Agreement Nr 610737
Support action for Vehicle and Road Automation network
Report on VRA Network
Deliverable no. D2.2
Dissemination level PU
Work Package no. WP2
Main author(s) Davide Brizzolara, Maxime Flament
Co-author(s) VRA Partners
Version Nr (F: final, D: draft) V1.0 F
File Name VRA_20151031_WP2_DEL2.2_v1.0.docx
Project Start Date and Duration 01 July 2013, 42 months
Ref. Ares(2015)4974225 - 10/11/2015
Page 2
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 2
Document Control Sheet
Main author(s) or editor(s): Davide Brizzolara, Maxime Flament
Work area: WP2
Document title: Report on VRA Network
Version history:
Version
number
Date Main author Summary of changes
v0.1 01/09/2015 Davide Brizzolara ToC
v0.2 13/09/2015 Davide Brizzolara Chapter 5 and 6
v0.3 24/09/2015 Davide Brizzolara Updates according to the feedback of the VRA partners
v0.4 25/11/2015 Davide Brizzolara Revision of the content
v0.5 06/11/2015 Davide Brizzolara Updates of Chapter 5
v0.1 09/11/205 Davide Brizzolara Final updates
Approval:
Name Date
Prepared Davide Brizzolara, Maxime Flament 09/11/2015
Reviewed Maxime Flament 09/11/2015
Authorised Maxime Flament 09/11/2015
Circulation:
Recipient Date of submission
EC 09/11/2015
VRA consortium 09/11/2015
Page 3
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 3
Table of Contents
Table of Contents 3
List of Figures 5
List of Tables 5
1 Introduction 6
1.1 Purpose of Document 6
1.2 Intended Audience 6
1.3 Structure of Document 6
1.4 VRA contractual references 6
1.5 Project Objectives 6
2 Introduction to VRA Networking Activities 8
2.1 Objective and structure of VRA WP2 8
2.2 International Collaboration 9
2.3 European Concertation 10
2.4 Information Exchange 10
3 VRA Networking Platform 11
3.1 Introduction 11
3.2 EU funded project on Automation 11
3.2.1 Introduction 11 3.2.2 CityMobil2 12 3.2.3 Adaptive 12 3.2.4 iGame 13 3.2.5 Autonet 2030 13 3.2.6 Companion 14 3.2.7 HF Auto 14 3.2.8 DAVI 15 3.2.9 Interactive 15 3.2.10 HAVEIt 15 3.2.11 CyberCars 15
3.3 IMobility Forum Automation Working Group 15
3.4 Trilateral EU-US-Japan Working Group on Automation in Road Transport 16
4 Report on VRA networking activities 18
4.1 Introduction 18
4.2 European meetings and workshops 19
4.2.1 EARPA-ERTICO meeting Automation activities (02/10/2014) 19
Page 4
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 4
4.2.2 Road Transport Information and Control (RTIC) 2014 (London) (05/10/2015) 19 4.2.3 VRA - City Mobil2 Meeting (Lausanne, Swiss) (01/12/2015) 19 4.2.4 VRA – iMobility Forum WG Meeting (Lausanne, Swiss) (02/12/2015) 20 4.2.5 iMobility Forum Plenary (Brussels) (28/01/2014) 21 4.2.6 CityMobil2 - Socio-economic impact of road automation (30-31/04/2015) 21 4.2.7 VRA – iMobility Forum WG Meeting iMobility Forum Automation Working Group meeting
(28/04/2015) 22 4.2.8 VRA WP3.3 Meeting on Standardisation and Certification (Brussels) (30/06/2015) 23 4.2.9 VRA – iMobility Forum WG Meeting (Brussels) (01/07/2015) 23 4.2.10 “Adaptive Workshop (Paris, France) (23/09/2015) 24
4.3 International Meetings and Workshops 25
4.3.1 Michelin Bibendum Challenge (Chengdu)(11-16/11/2014) 25 4.3.2 SIP-Adus Workshop (Tokyo) (17-19/11/2014) 26 4.3.3 Trilateral Automation Working Group in Road Transportation meeting (Tokyo) (19/11/2014) 26 4.3.4 Trilateral Automation Working Group in Road Transportation meeting (Washington) (11/01/2015) 28 4.3.5 TRB (Transportation Research Board) 94rd Annual Meeting (11-15/01/2015) 30 4.3.6 Trilateral Automation Working Group in Road Transportation meeting (La Rochelle, France) (31/03-
01/04/2015) 30 4.3.7 EU-US Symposium on Automation (Washington) (14-15/04/2015) 32 4.3.8 Automated Vehicles Symposium 2015 (/07/2015) 33
5 Information Exchange 34
5.1 Introduction 34
5.2 VRA Website 34
5.3 VRA Wiki 34
5.4 Webinar 35
5.4.1 VRA Webinar 4 – “Human Factors in vehicle automation: activities in the european project adaptive” 36 5.4.2 VRA Webinar 5 - “From Advanced Active Safety Systems to Automated Systems: From interactIVe to
AdaptIVe and beyond” 37 5.4.3 VRA Webinar 6 – “Cooperative Automation: Activities in the European Project i-GAME” 37 5.4.4 VRA Webinar 7 – “Vehicle Automation: Challenges and Opportunities for Cities” 38 5.4.5 VRA Webinar 8 – “Traffic Management in the Era of Vehicle Automation and Communication
Systems (VACS)” 39 5.4.6 Planned Webinars 39
6 Partners and Associated partners 41
6.1 VRA Consortium 41
6.2 VRA Partners 43
6.3 Overview of the Associates Partners 46
7 Conclusions 57
8 Bibliography 58
Page 5
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 5
List of Figures
Figure 1: Outline of the work packages of the VRA project .................................................................... 8
Figure 2: role of VRA within the Call FP7-ICT-2013-10 cluster and others ................................................ 11
Figure 3: Overview of the main areas of activities and of 2015 target ......................................................21
Figure 4: iMobility Forum Automation WG (meeting/plan 2015) .............................................................21
Figure 5: Overview of the Program of the SIP-adus Workshop ..............................................................26
Figure 6: organisation of the breakout session at the EU-US Symposium ................................................33
List of Tables
Table 1: Overview of the main Workshops and Meetings .....................................................................18
Table 2: Overview of the VRA Webinars held in the previous period (P1) .................................................35
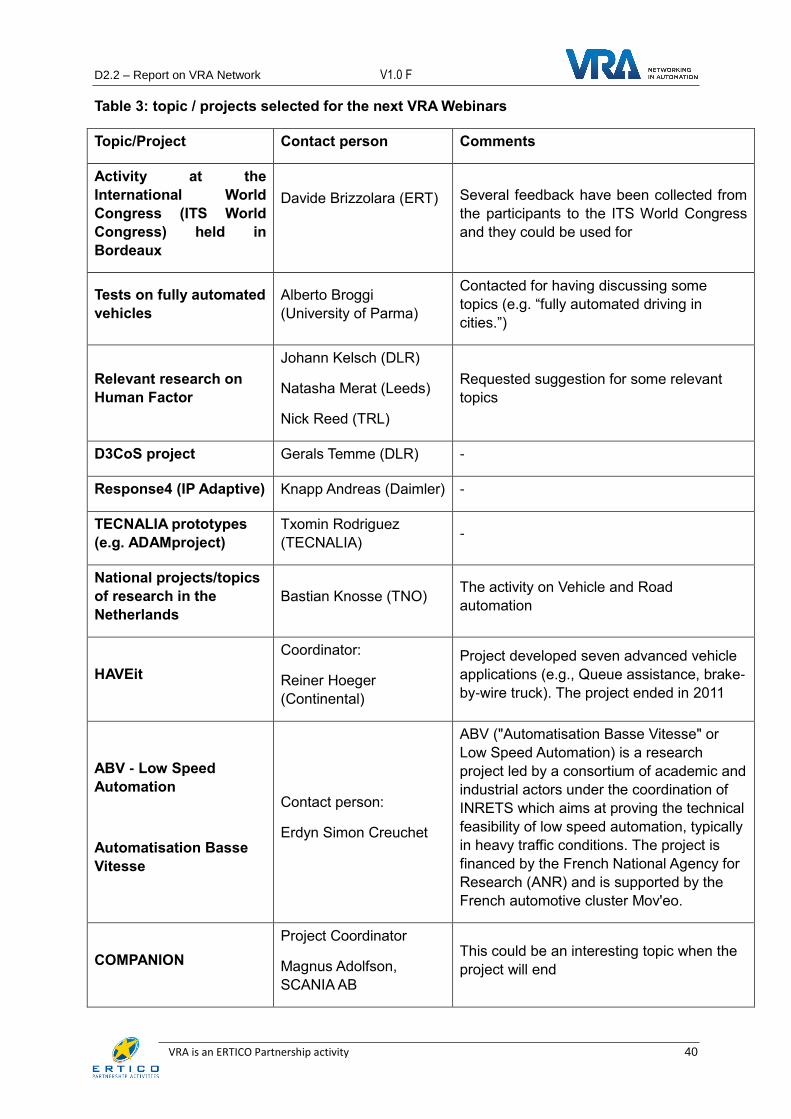
Table 3: topic / projects selected for the next VRA Webinars .................................................................40
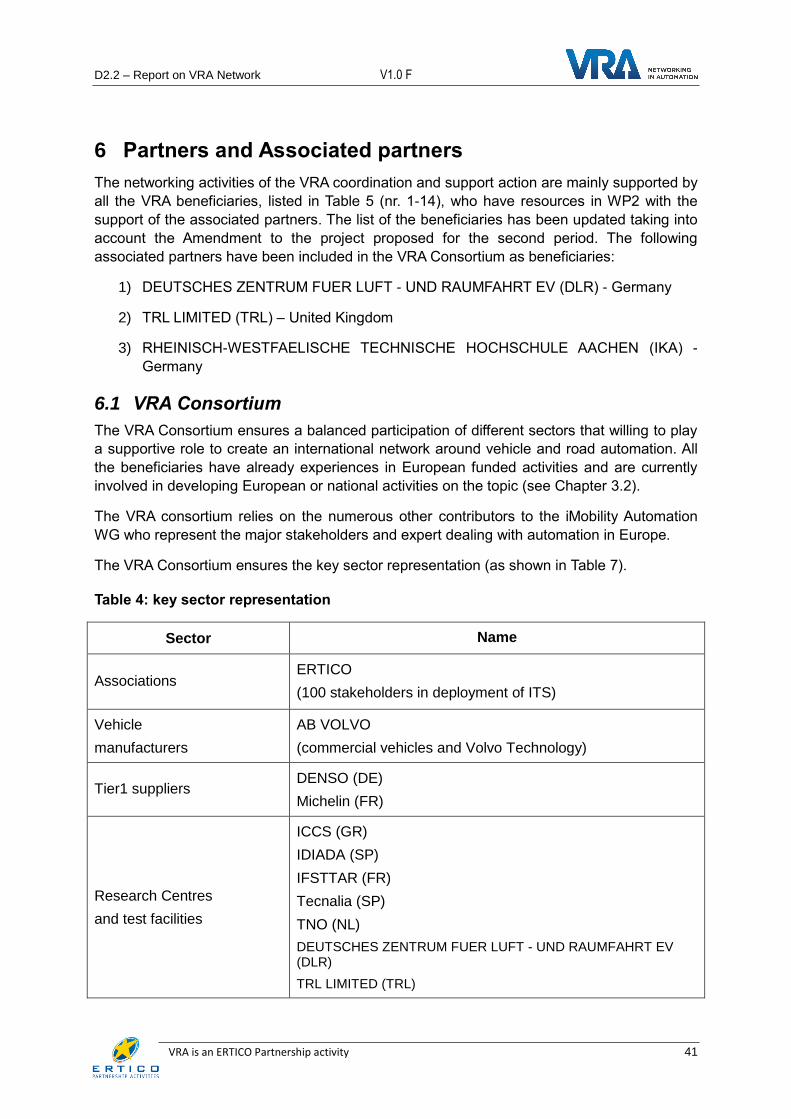
Table 4: key sector representation .................................................................................................41
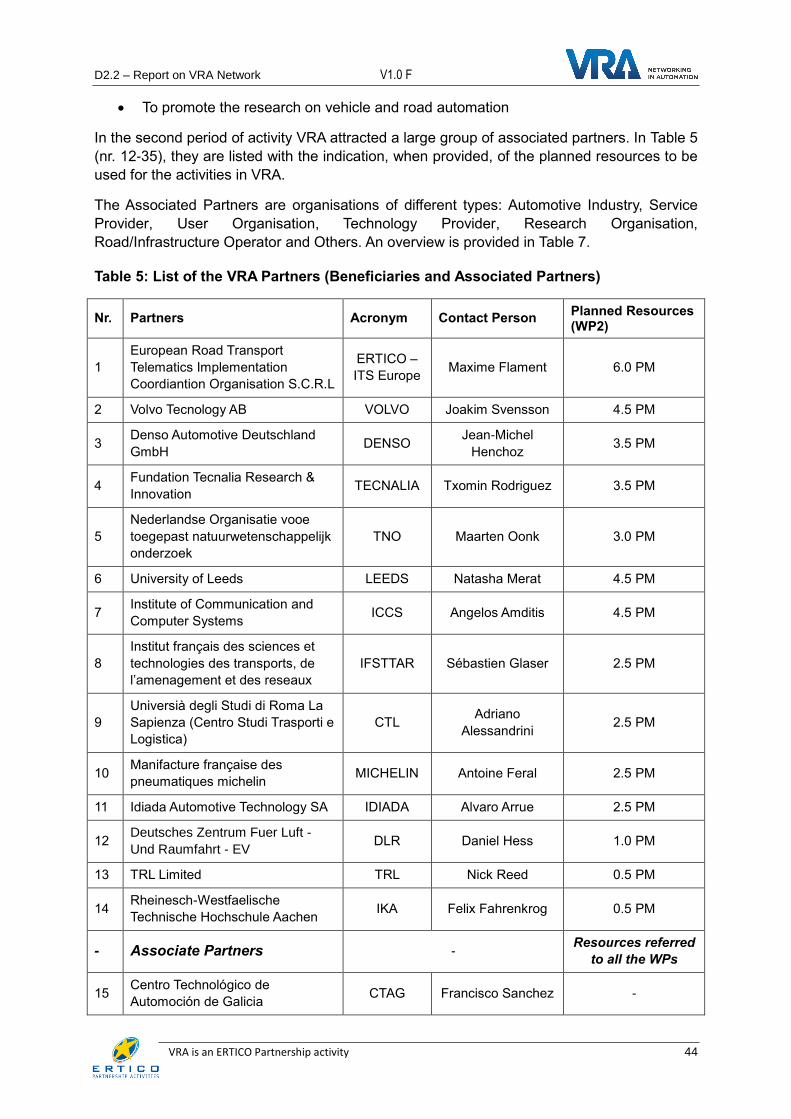
Table 5: List of the VRA Partners (Beneficiaries and Associated Partners) ................................................44
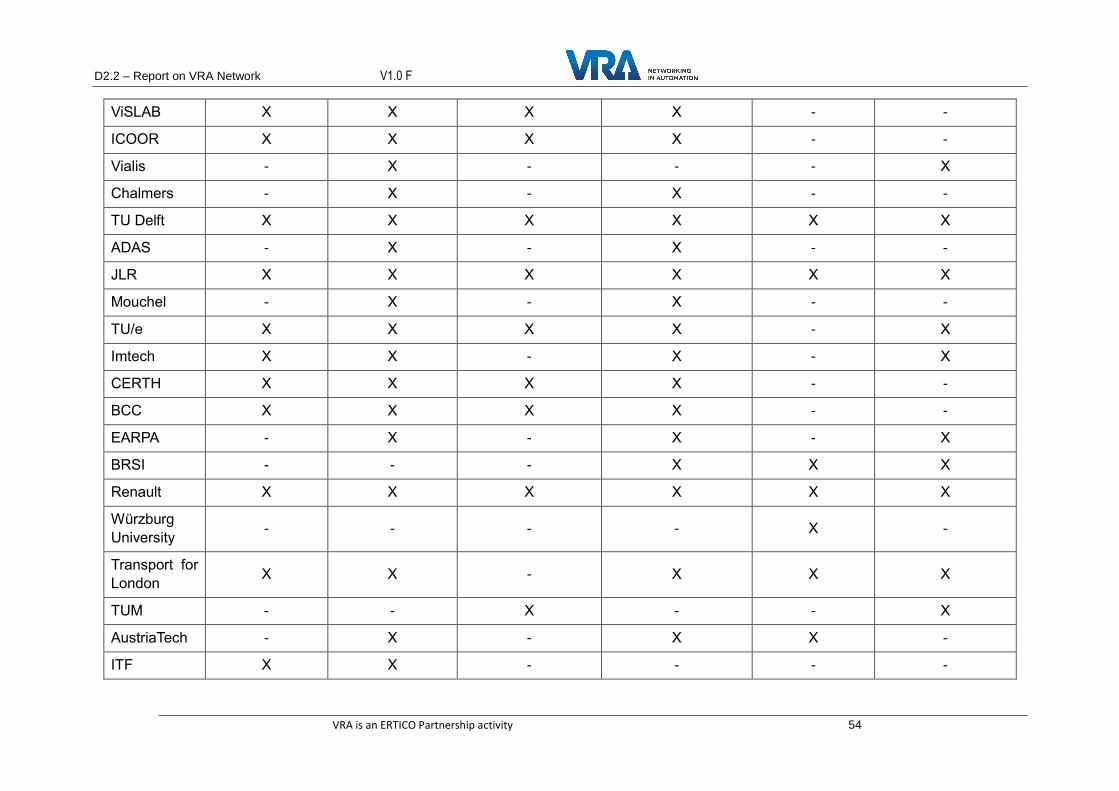
Table 6: Tasks indicated by the associated partners of utmost importance ................................................53
Table 7: Overview of the Associated partners type of organisation..........................................................55
Page 6
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 6
1 Introduction
1.1 Purpose of Document
The objective of this report is to provide an overview on the initiatives developed by VRA to
support the Network in Automation.
D2.2.1 also offers a compendium containing the achievements of different Working Group
and Partners to support the networking activities.
1.2 Intended Audience
This document is prepared for the European Commission and for relevant stakeholders in
Vehicle and Road Automation
1.3 Structure of Document
The document consists provides a short introduction to the VRA Network focusing on the its
objectives and structure, the international collaboration, the European concertation and the
information exchange.
Then a more detailed description of VRA Networking platform is offered describing relevant
initiatives and activities.
A report of the networking activities is proposed in Chapter 4 and a description of the
activities related to the Information Exchange is reported in Chapter 5.
Finally an overview of the VRA Partners is offered and the planned activities are illustrated.
1.4 VRA contractual references
VRA, Vehicle and Road Automation, is a Support Action submitted for the call FP7-ICT-2013-
10. It stands for Vehicle and Road Automation Network.
The Grant Agreement number is 610737 and project duration is 42 months, effective from 01
July 2013 until 31 December 2016. It is a contract with the European Commission (EC),
Directorate General Communications Networks, Content & Technology (DG CONNECT).
The EC Project Officer is:
Myriam Coulon-Cantuer EUROPEAN COMMISSION DG CONNECT – UNIT Office BU31 06/17, B-1049 Brussels Tel: +32 (2) 29 94156 E-mail: [email protected]
1.5 Project Objectives
In the field of vehicle and road automation, VRA’s main objectives are:
To maintain an active network of experts and stakeholders
To contribute to international collaboration
Page 7
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 7
To identify deployment needs
To promote research and deployment initiatives
In practice, VRA will:
Organise or support international meetings together with similar initiatives in US and
JPN. (WP2.1)
Support the iMobility Forum Automation WG and extend its role as a reference group
for European activities on the topic eventually formulating common positions,
especially at European level (WP2.2)
Aggregate information on existing research or deployment activities in a shared wiki
(WP2.3)
Describe valid business models and deployment paths & scenarios and investigate
the broad socio-economic implications of automation for the future societies (WP3.1)
Clarify, report and setup a plan of actions on legal, liability, insurance and regulatory
issues in different member states (WP3.2)
Monitor and steer standardisation, compliance and certification for vehicle and road
automation (WP3.3)
Contribute to the discussion on relevant topics for the deployment of Vehicle and
Road Automation: Connectivity (WP3.4), Human Factors (WP3.5), Digital
Infrastructure (WP3.6), Evaluation of Benefits (WP3.7) and Decision and Control
Algorithms (WP3.8).
Page 8
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 8
2 Introduction to VRA Networking Activities
2.1 Objective and structure of VRA WP2
The VRA project (1), launched in July 2013, is a support action funded by the European
Union to create a collaboration network of experts and stakeholders working on deployment
of automated vehicles and its related infrastructure. It is considered as the cooperation
interface between EC funded projects, international relations and national activities on the
topic of vehicle and road automation.
The VRA activities provide support to two well established cooperation initiatives:
iMobility Forum Automation WG at European level: VRA gathers past and current activities to feed the needs of the iMobility Forum Automation WG which provides input for future research needs and recommendations for the EC.
Trilateral WG on Automation in Road Transport at international level VRA supports the European Commission with expert inputs for the discussions with the US Department of Transport and Japan Ministry of Land, Infrastructure and Transport.
The coordination of the VRA network and of the VRA networking activities in VRA is
managed in WP2 led by ERTICO-ITS EUROPE (see Figure 1).
WP1: Management (ERT)
WP2: Networking Activities (ERT)
WP2.1 International collaboration (TNO)
WP2.2 European concertation (VOLVO)
WP2.3 Information exchange (ERT)
WP3: Deployment needs
(TECNALIA)
WP4: Dissemination (ERT)
Figure 1: Outline of the work packages of the VRA project
WP2 is structured in three different tasks and its activities are focused on the International
collaboration, the European concertation and the Information exchange.
The discussions and initiatives of WP2 are used to feed the activities in WP3 and vice versa
the needs and discussion in WP3 are considered in the planning for the activities in WP2.
One of the main missions of WP2 is to involve stakeholders and foster collaboration between
projects and activities by:
Identifying relevant activities
Identifying common partners
Proposing collaboration
Page 9
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 9
o What: topics, gaps o How: Level of collaboration o When: Timeline
Making simple bilateral agreements
2.2 International Collaboration
The international collaboration, addressed in WP2.1, contributes to the creation of the
International activities through the following tasks:
1) Establish a dialogue with main international actors (EC, US DoT, MLIT)
2) Engage with other regions (US, JPN, China, Australia, others) to co-organise
international meetings
3) Agree on common issues to be addressed at international level
4) Maintain a regular exchange of information informing on each other’s progress wrt
common issues
5) Participate to main international activities in the framework of the EU-US-JPN
collaboration on automation
The previous tasks have been implemented during the first period of the VRA projects by
performing the following actions:
1) The establishment of contacts with the main international actors has been guaranteed
by the supported by the task Leader VOLVO and the other partners relying on
previous on the links of the Trilateral Automation Working Group. Reference persons
have been identified for the US DoT and MLIT. The dialogue with the EC commission
has been focused to different DG involved in activity concerning automation (DG )
promoted by:
a. Direct invitation for participating to event;
b. Periodic updates and meetings.
In line with this objective, a Workshop to report on the activities of the VRA project
has been planned in conjunction with the first Annual Review in order to inform
interested parties in the EC commission.
2) International meetings have been organised supporting the activities of the Trilateral
Working Group in collaboration with representatives of other regions
3) VRA supported the discussion on specific topics and common issues to be addressed
at international level: in particular during the Trilateral Automation Working Groups
specific activities been proposed to reach this objective (e.g. working sessions on the
topic of Digital Infrastructure).
4) The exchange of information has been supported during the meetings by planning
presentations to describe the current running activities.
5) VRA in this first period of activity participated to the initiatives organised by the
Trilateral Working Group on Automation supporting the EU-US-JPN participation.
Moreover, round table discussions on common issues have been organised during the
meetings in order to feed the WP3 discussions (e.g. discussion on the recommendations to
submit to the EC for the next H2020 calls).
WP2.1 relied on the outcome of WP2.2’s European concertation meetings since issues
brought at international level have been discussed in smaller groups in Europe from which
agreed positions emerge.
Page 10
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 10
2.3 European Concertation
VRA WP2.2 supported the European Concertation, bringing the active European actors
around the table to initiate synergies and reach common positions.
The European concertation has been initiated and supported by inviting projects and parties
from European funded projects to common meetings. This task has been developed in close
collaboration with the activities of the Automation Working Group and it involved several
European Project and other relevant national Activities (see Chapter 3.2).
The outcome of the discussion was used to consolidate the working documents (e.g. the
iMobility Forum White Paper planned to be submitted by the end of 2016) and the preliminary
deliverables of WP3 on deployment paths, regulation and legal issues and standardisation
and certification. Specific breakout sessions for the different identified sub-working groups
have been proposed (e.g. Human Factors, Standardisation and Certification, Connectivity,
etc…).
The activity of WP2.2, as planned, was focused on the following point:
1) Extend the role of the Automation WG to become a concertation group for Automation
in Europe. This has been achieved by organising 3 VRA Workshops and supporting
the organisation of meetings of the Automation Working Group.
2) Plan relevant discussions and organise regular Automation WG meetings and three
wider concertation meetings. The relevant meetings are reported in Chapter 4.
3) Consult stakeholders and identify eventual barriers to deployment
4) Maintain a road map for Vehicle and Road Automation: this has been achieved by
consolidating the results of the discussion in D3.1.2 “Deployment paths for Vehicle
and Road Automation (Draft 2)”.
WP2.2 acted to bring people together on agreed positions and increase their willingness to
solve problems together in a collaborative way. The discussions promoted by WP2.2 served
as input for the Deliverables of WP3.
As mentioned in the DoW, it is eventually planned to write position papers on specific topics.
Each meeting has been documented on the VRA Website by reporting the minutes and all
the presentations.
2.4 Information Exchange
WP2.3 activities were focused on search and identify any relevant activity worldwide for
Vehicle and Road Automation and invite them to participate to the VRA network.
As planned, the WP2.3 was addressed by the following tasks:
Identify relevant VRA activities worldwide. This was achieved by the support of VRA
partners and by the international contacts mainly by presentations during the planned
meetings on the status of the current activities. The results were used to enrich the
content of the VRA Wiki
Request information and contribute to the inventory of relevant activities and contact
lists on the online information exchange tool (wiki)
Webinars in order to present the current relevant activities. Several Webinars have
been organised as reported in Chapter 5.4.
Page 11
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 11
3 VRA Networking Platform
3.1 Introduction
The VRA network is based on the interaction with:
EU funded projects on Vehicle and Road Automation, mainly funded by the Call FP7-
ICT-2013-10,
The already established network and activity of the iMobility Forum Automation
Working Group,
The activity and network of the Trilateral Working Group on Automation in road
transport in the framework of the ITS US JAPAN ITS Cooperation.
3.2 EU funded project on Automation
3.2.1 Introduction
This paragraph offers an overview of the different European projects on the topic on Vehicle
and Road automation, in particular of those supported by the call FP7-ICT-2013-10. VRA
supported connection and liaisons between these projects. Several VRA partners are
involved in some relevant EC funded projects (Figure 2):
IDIADA (Companion and iGame),
VOLVO (AutoNet 2030, AdaptIvE),
TNO (AdaptIve, iGame),
University of Leeds (AdaptIvE),
ICCS (AutoNet2030, AdaptIvE),
CTL (CityMobil2).
Figure 2: role of VRA within the Call FP7-ICT-2013-10 cluster and others
Page 12
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 12
3.2.2 CityMobil2
CityMobil2 (2) is a multi-stakeholder project co-funded by the EU’s Seventh Framework
Programme for research and technological development (commonly known as FP7).
CityMobil2 is setting up a pilot platform for automated road transport systems, which will be
implemented in several urban environments across Europe. Automated transport systems
are made up of vehicles operating without a driver in collective mode. They are deemed to
play a useful role in the transport mix as they can supply a good transport service (individual
or collective) in areas of low or dispersed demand complementing the main public transport
network. A dozen local authorities or equivalent sites are in the bidding to be one of the five
sites to host a 6-month demonstration. All recognise the potential of vehicle automation as
part of their public transport network. Two sets of six vehicles each for the demonstrations
will be supplied by two of the five manufacturers within the project. The project will procure
the vehicles and make them available to the selected pilot sites for the duration of the
demonstrations.
In addition to the pilot activities, research will be undertaken into the technical, financial,
cultural, and behavioural aspects and effects on land use policies and how new systems can
fit into existing infrastructure in different cities. The legal issues surrounding automated
transport will also be addressed leading to a proposed framework for certifying automated
transport systems.
CityMobil2 started in September 2012 and will run for 4 years and has 45 partners drawn
from system suppliers, city authorities (and local partners), the research community and
networking organisations. Local authorities involved in CityMobil2 have been addressed by
VRA through the CITYMOBIL2 activities and other existing contacts with cities such as, but
not limiting to, Bordeaux for the ITS world congress in 2015.
Under the framework of “CityMobil2” a workshop on “EU legal framework to certify
Automated Road Transport Systems in urban areas” workshop on ‘’EU legal framework to
certify Automated Road Transport Systems in urban areas’’ was held in Athens, Greece, on 5
May 2014. VRA supported the preparation of the Workshop and the dissemination of the
results. More information about the workshop are provided in Paragraph 4.2.10.
VRA supported a Workshop in collaboration with the project “CityMobil2” which was held in
Lausanne the 01/12/2014. The objective of this Workshop was to support the interaction
between the public authorities and other interested stakeholders and technical experts in
automation.
VRA supported the CityMobil2 project for the preparation of the Workshop on “Socio-
economic impact of road automation” held in La Rochelle the 30-31/04/2015. Several VRA
Partners participated to the working sessions organised during the Event.
3.2.3 Adaptive
The recently launched AdaptIVe (Automated Driving Applications & Technologies for
Intelligent Vehicles) (3) is an Integrated Project (IP) supported by the EU under the 7th
Framework Programme that designs, implements and evaluates a number of integrated
applications offering different levels of automated driving on motorways, in urban scenarios
and in close-distance manoeuvres.
Page 13
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 13
The approach of AdaptiVe is based on a concept of shared control, assuring proper
collaboration between the driver and the automation system. This is achieved by using
advanced sensors, cooperative vehicle technologies and adaptive strategies in which the
level of automation is dynamically adapted to the situation and driver status. The project will:
Demonstrate automated driving in complex traffic environments
Focus on communication capabilities to enhance the performance of automated
systems
Provide guidelines for the implementation of cooperative controls involving both the
human and the automation
Define and validate new specific evaluation methodologies
Assess the impact of automated driving on the European road transport
Propose a legal framework overcoming the existing barriers to implementation
The VRA project coordinator, Maxime Flament, gave a presentation during the Workshop on
on legal aspects of automated driving on 17 September 20151.
3.2.4 iGame
The aim of i-Game (4) (Interoperable GCDC Automation Experience) is to speed up real-life
implementation and interoperability of wireless communication based automated driving. This
will be achieved by joint development and demonstration.
i-Game uses a two-way parallel approach to design and setup interoperable automated
driving systems, by developing a functional architecture and demonstrating it in a multivendor
challenge. First, a functional architecture will be developed. The components of the system
(like the communication and the overall supervisory control system) will be developed on
simulation level first and then tested in practice using benchmark vehicles. Second, a multi-
vendor grand cooperative driving challenge (GCDC) will be organized in the Spring of 2016,
to which teams will be invited. A series of verification and validation workshops will be
organized for the participating teams, having its climax in the final challenge on cooperative
automated driving, together with leading RTDs, and supported by OEMs and suppliers.
The activities of iGame have been presented during the European meetings organised by
VRA and a specific working session to discuss about the relevant scenarios for iGame has
been organised during the Workshop in January 2014 (paragraph 4.2.5).
The project iGame supported the 5.4.3 VRA Webinar 6 – “Cooperative Automation: Activities
in the European Project i-GAME”.
3.2.5 Autonet 2030
The European project AutoNet2030 (5) shall develop and test a co-operative automated
driving technology, based on a decentralised decision-making strategy that is enabled by
mutual information sharing among nearby vehicles. The project is aiming for a 2020-2030
1 http://www.adaptive-ip.eu/index.php/reader/experts-discuss-legal-aspects-of-automated-driving.html
Page 14
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 14
deployment time horizon, taking into account the expected preceding introduction of co-
operative communication systems and sensor based lane-keeping/cruise-control
technologies. By taking this approach, a strategy can be worked out for the gradual
introduction of fully automated driving systems, which makes the best use of the widespread
existence of co-operative systems in the near-term and makes the deployment of fully
automated driving systems beneficial for all drivers already from its initial stages. The
intervehicle co-operation is meant not only among automated vehicles, but extends also to
manually driven vehicles. Drivers shall receive manoeuvring instructions on their HMI; while
the ergonomic and non-distracting nature of this new user interface shall be validated. This
system shall be optimised to make safe, predictable, and efficient manoeuvring decisions.
3.2.6 Companion
The European project Companion (6) (Cooperative Mobility solution for supervised
platooning) was launched with the aim to support platooning operations on European roads
in multiple countries mainly with the following objectives:
The project supports the development and validation of a fault tolerant, scalable off-board
decision-making system to determine the optimal coordination of platoons and of multimodal,
in-vehicle and coordination centre user interfaces to safely and effectively inform and
interact.
The project focuses on the identification of standardisation and legislative gaps and the
proposal of legal solutions and new technological standards to advance the large-scale
adoption of platooning technologies. Finally, Companion will provide a demonstration of
platooning operations on European roads in multiple countries.
Companion was launched at the end of 2013, and the official technical meeting was held in
February 2014. The activities and the status of the project have been reported during the
European meetings organised by VRA.
3.2.7 HF Auto
Road transport is an essential part of society but the burden of traffic crashes, congestion,
and pollution is enormous. Highly automated driving (HAD) has the potential to resolve these
problems and major car makers foresee that HAD will be technically ready for
commercialisation within one decade from now. However, before automated driving can be
safely deployed on public roads we have to deal with imminent human-error and legal
consequences. HFAuto will answer crucial human-factors questions, such as:
How should human-machine-interfaces (HMI) be designed to support transitions
between automated and manual control?
How can the automation understand the driver’s state and intentions?
What are the effects of HAD on accident risk and transport efficiency?
HF Auto aims to bridge the gap between engineers and psychologists through a
multidisciplinary research and training programme. The project will combine engineering
domains such as simulator hardware, traffic flow theory, control theory, and mathematical
driver modelling with psychological domains such as human action and perception, cognitive
modelling, vigilance, distraction, psychophysiology, and mode/situation awareness, to
optimally address the interdisciplinary domain of human factors. Through secondments in
Page 15
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 15
automotive industry, road safety institutes, and academia, the researchers will gain
transferable knowledge of human factors, technology, and legal and marketing aspects of
HAD. http://hf-auto.eu/
3.2.8 DAVI
The Dutch Automated Vehicle Initiative develops high automated vehicles for research and
demonstrations on public roads. The research tries to proof the safety and focusses on
human factors in automated driving. DAVI implements automation technology in real cars
that can be driven on existing roads in normal traffic. At the Innovation-Relay in Amsterdam
minister Schulz Van Haegen made the first public ride in DAVI vehicle
3.2.9 Interactive
The European research project interactIVe took the next step towards the goal of accident-
free traffic. I nteractIVe developed advanced driver assistance systems (ADAS) for safer and
more efficient driving. interactIVe introduced safety systems that autonomously brake and
steer. The driver is continuously supported by interactIVe assistance systems. They warn the
driver in potentially dangerous situations. The systems do not only react to driving situations,
but are also able to actively intervene in order to protect occupants and vulnerable road
users. Seven demonstrator vehicles – six passenger cars of different vehicle classes and one
truck – were built up to develop, test, and evaluate the next generation of safety systems.
3.2.10 HAVEIt
HAVEit aims at the realization of the long-term vision of highly automated driving for
intelligent transport. The project will develop, validate and demonstrate important
intermediate steps towards highly automated driving.
3.2.11 CyberCars
Cybercars are road vehicles with fully automated driving capabilities. A fleet of such vehicles
forms a managed transportation system, for passengers or goods, on a network of roads with
on-demand and door-to-door capability. This concept emerged in Europe in the early 1990's
and was introduced for the first time in the Netherlands in December1997 for passenger
transport at Schipol airport. Since then, it has been developed under a number of European
projects such as CyberCars, CyberMove, EDICT, Netmobil and CyberC3 . Different projects,
also supported by the European Commission have been launched focusing on these
vehicles (e.g. CyberCars-2 and CityMobil).
3.3 IMobility Forum Automation Working Group
The iMobility Forum Automation WG is a public/private partnership acting as a forum for
understanding the state of the art of Automation in Road Transport, exploring and promoting
the potential of highly automated vehicles and applications for intelligent and sustainable
mobility. It provides as well a clear direction for the challenges of the future, defining the
research topics in the field of automation in transport.
The mission of the working group on Automation in Road Transport is to identify how
automation and its subsequent applications can help to improve efficient, clean, safe and
reliable road transport now and in the future and what is needed to foster deployment and
implementation. To be more specific the working group focussed its activities on the common
Page 16
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 16
agreement on developing one or more roadmaps for future developments in the area of
automation in road transport.
The activity of the Automation Working Group (launched in 2011) is now planned around
different Working Groups corresponding to relevant research topics such as:
Digital Infrastructure
Human Factors
Evaluation of Benefits
Connectivity
Roadworthiness Testing
Decision and Control Algorithms
Regulatory issues
Development path
In the activities of the group, it has been agreed to take into account mainly 3 explanatory
use cases: highway truck platooning, highway autopilot, intelligent intersection control. The
near-term objective is to provide a few recommendations and results be included in the
future roadmap.
The The Automation Working Group provide to the European Commission recommendation
for the preparation of the next European calls in 2015 and 2016.
The Automation Working Group was supported by VRA in the preparation of a White Paper
on Automation which will be submitted by the end of 2016.
3.4 Trilateral EU-US-Japan Working Group on Automation in Road Transport
trilateral EU-US-JP Automation in Road Transportation Working Group has been established
to support the cooperation between Europe, United States and Japan on the topic of
Automation.
The trilateral Working Group focuses on automated operation involving all road users, within
a connected environment, for broad information sharing and focused collaboration across the
regions. The working group exchanges and discuss views and perspectives on relevant
topics in the area of vehicle and road transport automation that apply to the role of public
authorities with all stakeholders, to disseminate the state-of-the art and to define needs for
harmonization and standardization in order to support international developments and
deployment.
The objective and goal of the Vehicle Automation Working Group can be summarised as
follows:
1) Goal: Identify, research, quantify, and evaluate applications that would improve the
operation of Connected Road Vehicle Automation
Page 17
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 17
2) Objective: Coordinate research on the development of Connected Road Vehicle
Automation technologies and concepts that facilitate deployment and market uptake
The activity of the Trilateral Working Groups continues on the following areas of cooperation:
Digital infrastructure: to identify the role of digital maps for automation
Human factors: to identify solutions for driver and other road user interactions
Roadworthiness Testing: to define the necessary or appropriate tests required to
allow the safe and reliable operation of automated vehicles on public roads
Evaluation of Impact – Impact assessment: to establish a unified list of potential direct
and indirect socio economic impacts ,and jointly try to quantify them
Accessible transport
Legal Issues (ad hoc): to monitor the activities in the different regions
The Trilateral Working Group meeting are reported in Chapter 0.
Page 18
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 18
4 Report on VRA networking activities
4.1 Introduction
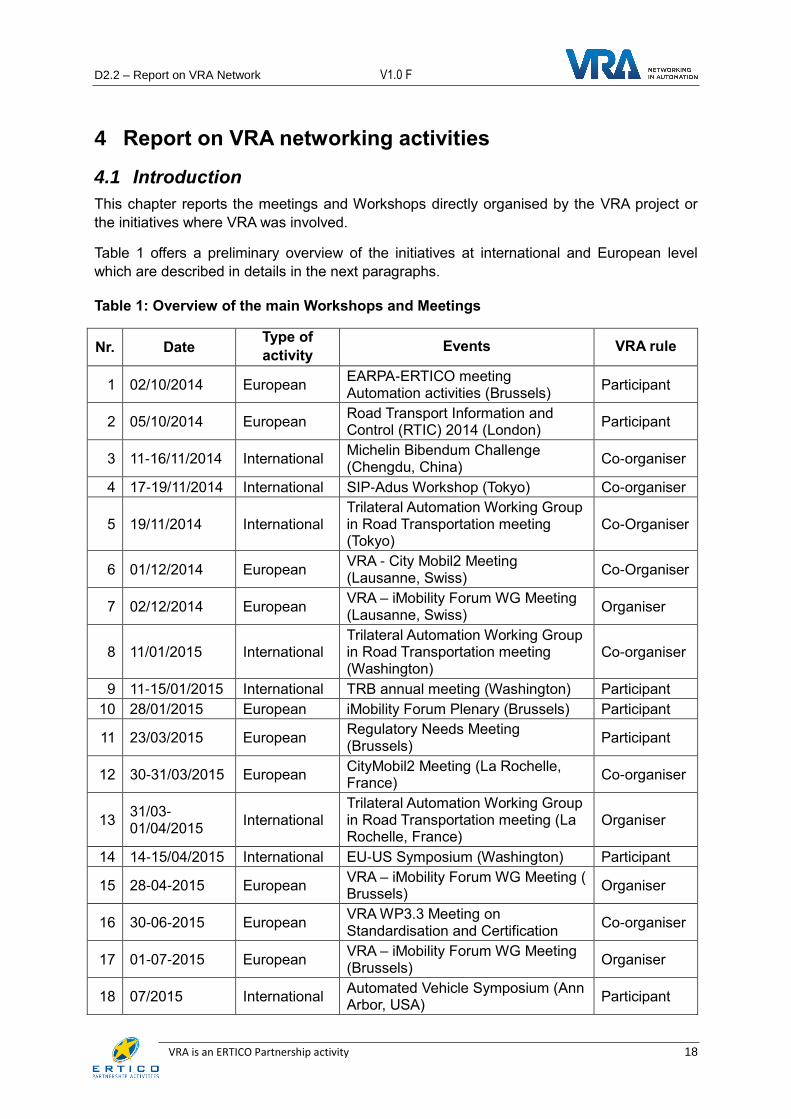
This chapter reports the meetings and Workshops directly organised by the VRA project or
the initiatives where VRA was involved.
Table 1 offers a preliminary overview of the initiatives at international and European level
which are described in details in the next paragraphs.
Table 1: Overview of the main Workshops and Meetings
Nr. Date Type of
activity Events VRA rule
1 02/10/2014 European EARPA-ERTICO meeting Automation activities (Brussels)
Participant
2 05/10/2014 European Road Transport Information and Control (RTIC) 2014 (London)
Participant
3 11-16/11/2014 International Michelin Bibendum Challenge (Chengdu, China)
Co-organiser
4 17-19/11/2014 International SIP-Adus Workshop (Tokyo) Co-organiser
5 19/11/2014 International Trilateral Automation Working Group in Road Transportation meeting (Tokyo)
Co-Organiser
6 01/12/2014 European VRA - City Mobil2 Meeting (Lausanne, Swiss)
Co-Organiser
7 02/12/2014 European VRA – iMobility Forum WG Meeting (Lausanne, Swiss)
Organiser
8 11/01/2015 International Trilateral Automation Working Group in Road Transportation meeting (Washington)
Co-organiser
9 11-15/01/2015 International TRB annual meeting (Washington) Participant
10 28/01/2015 European iMobility Forum Plenary (Brussels) Participant
11 23/03/2015 European Regulatory Needs Meeting (Brussels)
Participant
12 30-31/03/2015 European CityMobil2 Meeting (La Rochelle, France)
Co-organiser
13 31/03-01/04/2015
International Trilateral Automation Working Group in Road Transportation meeting (La Rochelle, France)
Organiser
14 14-15/04/2015 International EU-US Symposium (Washington) Participant
15 28-04-2015 European VRA – iMobility Forum WG Meeting ( Brussels)
Organiser
16 30-06-2015 European VRA WP3.3 Meeting on Standardisation and Certification
Co-organiser
17 01-07-2015 European VRA – iMobility Forum WG Meeting (Brussels)
Organiser
18 07/2015 International Automated Vehicle Symposium (Ann Arbor, USA)
Participant
Page 19
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 19
19 23-24/07/2015 International Trilateral Automation Working Group in Road Transportation meeting (Ann Arbor,USA)
Co-organiser
20 17/09/2015 European Adaptive Workshop (Paris, France) Participant
21 23/09/2015 European VRA – iMobility Forum WG Meeting Organiser
22 24/09/2015 European VRA Consortium Meeting Participant
23 04/10/2015 International International Task Force on Vehicle and Highway Automation (ITFVHA) (Bordeaux, France)
Co-organiser
24 05-09/10/2015 International ITS World Congress (Bordeaux, France)
Organiser of several initiatives during the Congress
4.2 European meetings and workshops
This paragraph offers a short overview of the main meetings and workshops organised by
VRA and of the initiatives where VRA participated.
4.2.1 EARPA-ERTICO meeting Automation activities (02/10/2014)
The VRA project coordinator gave a presentation on the VRA and iMobility Forum WG
activities focusing on:
- Hot topics discussed in the sub-WGs of the iMobility WG
- Role of VRA as facilitator for collaboration between national and EU-funded activities
- Roadmap developed by the iMobility Forum
4.2.2 Road Transport Information and Control (RTIC) 2014 (London)
(05/10/2015)
The VRA project coordinator gave a presentation on the VRA and iMobility Forum WG
activities focusing on:
- Structure and objectives of VRA
- Hot topics discussed in the sub-WGs of the iMobility WG
- Roadmap developed by the iMobility Forum
4.2.3 VRA - City Mobil2 Meeting (Lausanne, Swiss) (01/12/2015)
VRA supported a Workshop in collaboration with the project “CityMobil2” which was held in
Lausanne the 01/12/2014. The objective of this Workshop was to support the interaction
between the public authorities and other interested stakeholders and technical experts in
automation.
During the Workshop the following topics were discussed:
1) An update of the CityMobil2 activities
Page 20
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 20
2) The vision on automated road transport systems of different cities (e.g. Vantaa and
La Rochelle) along with the view of road vehicle automation from selected Group
members (e.g. Milton Keynes, Helmond and Barcelona)
3) An overview on the VRA Coordination and Support Action activities including two
sessions on:
a. “Automation technologies” (focusing in European and international activities)
moderated by the VRA Partners TNO (Bastiaan Krosse) with the participation
of Richard Bishop (Bishop Consultant, US) and Paul Tan (ST Engineering,
Singapore)
b. “Towards a legal framework for the deployment of Automated Urban
Transport Systems” moderated by the VRA Coordinator Maxime Flament
(ERTICO – ITS Europe) with the participation of Michel Parent (INRIA), Steve
Shladover (CA Path, US) and Arjan van Vliet (RDW)
The meeting was ended by a panel discussion on the following topic: ”The role of automation
in Europe’s urban mobility of the future – which services and infrastructure?”.
All the presentations of the Workshop are available on the VRA Website at the following
address: http://vra-net.eu/news/010122014-vra-citymobil2-reference-group-workshop/
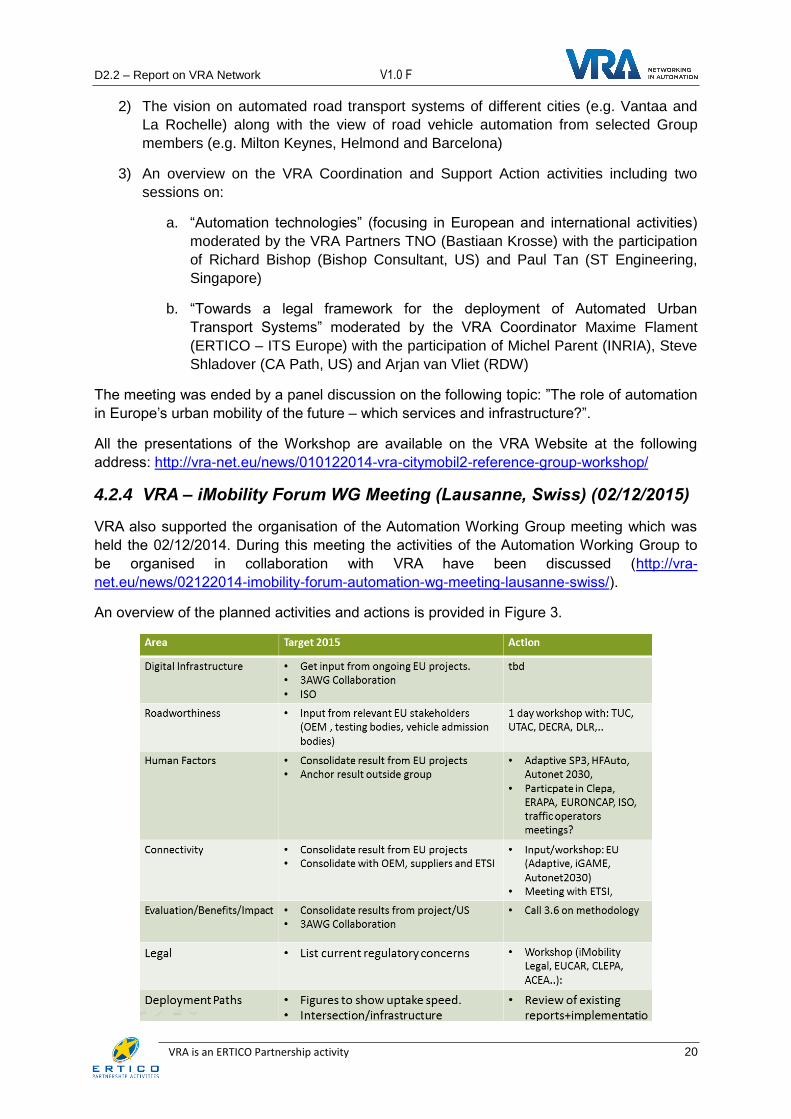
4.2.4 VRA – iMobility Forum WG Meeting (Lausanne, Swiss) (02/12/2015)
VRA also supported the organisation of the Automation Working Group meeting which was
held the 02/12/2014. During this meeting the activities of the Automation Working Group to
be organised in collaboration with VRA have been discussed (http://vra-
net.eu/news/02122014-imobility-forum-automation-wg-meeting-lausanne-swiss/).
An overview of the planned activities and actions is provided in Figure 3.
Page 21
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 21
Figure 3: Overview of the main areas of activities and of 2015 target
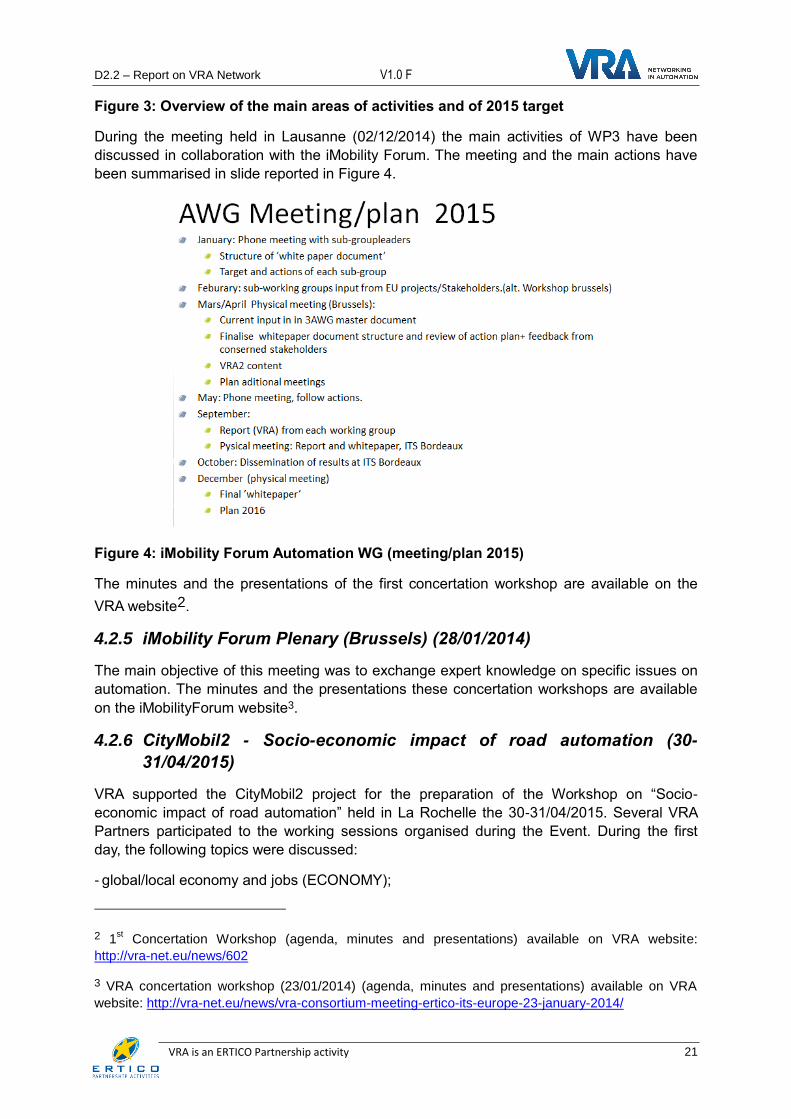
During the meeting held in Lausanne (02/12/2014) the main activities of WP3 have been
discussed in collaboration with the iMobility Forum. The meeting and the main actions have
been summarised in slide reported in Figure 4.
Figure 4: iMobility Forum Automation WG (meeting/plan 2015)
The minutes and the presentations of the first concertation workshop are available on the
VRA website2.
4.2.5 iMobility Forum Plenary (Brussels) (28/01/2014)
The main objective of this meeting was to exchange expert knowledge on specific issues on
automation. The minutes and the presentations these concertation workshops are available
on the iMobilityForum website3.
4.2.6 CityMobil2 - Socio-economic impact of road automation (30-
31/04/2015)
VRA supported the CityMobil2 project for the preparation of the Workshop on “Socio-
economic impact of road automation” held in La Rochelle the 30-31/04/2015. Several VRA
Partners participated to the working sessions organised during the Event. During the first
day, the following topics were discussed:
- global/local economy and jobs (ECONOMY);
2 1st Concertation Workshop (agenda, minutes and presentations) available on VRA website:
http://vra-net.eu/news/602
3 VRA concertation workshop (23/01/2014) (agenda, minutes and presentations) available on VRA
website: http://vra-net.eu/news/vra-consortium-meeting-ertico-its-europe-23-january-2014/
Page 22
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 22
- road capacity, transport quality and congestion (TRANSPORT);
- road safety, security/privacy and quality of life (SOCIETY);
- energy, land consumption and environment (ENVIRONMENT).
Maxime Flament (ERTICO) and Adriano Alessandrini (CTL) chaired the section on energy,
land consumption and environment.
During the second day, parallel working sessions were held to discuss the different
stakeholders’ perspectives/roadmaps to achieve desirable and sustainable driverless urban
transport scenarios. In particular the following: automotive industries; other private service
operators (e.g. insurances, commercial car sharing providers, taxi etc.); public authorities
and operators (local authorities, public transport operators); urban freight transport
stakeholders.
The final report consolidating the results of the discussions is planned to be released in May
2015.
The discussions held during the Workshop will feed the activities of VRA WP3.7 (according to
planned contract amendment).
4.2.7 VRA – iMobility Forum WG Meeting iMobility Forum Automation
Working Group meeting (28/04/2015)
During the VRA – iMobility Forum meeting organised the 28/04/2015, the main points of the
Agenda were the following:
1) White paper on Automation. The main objective of the White Paper has been identified: report to the EU about currents needs to influence policies and calls. It has been also noted the importance to highlight the activities in the EU vs. USA and Japan and to consider the relation with the VRA deliverables to consolidate the work. In addition it has been defined the activity for each of the different sub-working group taking into account a template provided by the i-Mobility Forum co-chair. During the meeting few groups have been organised to provide a preliminary contribution to each of the sub-working group chapters.
2) Discussion on previous events:
City Mobil 2 Workshop in La Rochelle. Final results of the Workshop will be
published and there will be a feedback for the audience.
Workshop on Legal Needs: the minutes are available on the iMobility Forum
website (http://www.imobilitysupport.eu/library/imobility-forum/working-
groups/active/legal-issues/meetings-8/2015-5/23-mar-2015)
EU-US Symposium (Washington 14-15 April 2015) (see the short summary
proposed in the previous paragraph)
3) Planning of the next Events:
a. Workshop on standardisation and certification (IDIADA) supported by IDIADA,
to organise a meeting between the relevant experts in the different FP7 Call
10 projects (Companion, Adaptive, iGAME, Autonet2030). This workshop
should show the rest of the projects their activities in standardization and
Page 23
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 23
identify potential overlaps or gaps that may encourage coordination between
the projects.
b. ITS World Congress (Bordeaux): Special Interest Sessions and Stakeholders
Workshops.
A preliminary version of the White Paper has been circulated to all the iMobilityForum
Automation WG after the meeting.
The minutes of the meeting are available on Projectplace at the following link:
https://service.projectplace.com/pp/pp.cgi/0/1123725892
The minutes and the presentations of the first concertation workshop are available on the
VRA website4.
4.2.8 VRA WP3.3 Meeting on Standardisation and Certification (Brussels)
(30/06/2015)
This meeting has been organised by VRA WP3 and the main results are reported in VRA
WP3.3 - D3.2.2.
4.2.9 VRA – iMobility Forum WG Meeting (Brussels) (01/07/2015)
In order to progress with the elaboration of the White Paper an additional meeting has been
organised the 01/07/2015 at ERTICO in Brussels.
The meeting has been organised to discuss the following points:
1) White paper on Automation: the preliminary version of the White Paper has been presented by Bastiaan Krosse. It has been noted that the White Paper could be considered as a support to provide an overview of the expected projects and outcome that should be proposed under the next calls on Automation proposed by the European Commission. The current version of the White Paper has been discussed by all the participants and comments have been added to the document. As in the previous meeting the activity, separated working groups have created to discuss the different topics (listed below are indicated the sub-working groups with the Leaders):
a) Connectivity (Panagiotis Lytrivis, ICCS)
b) Roadworthiness Testing (Alvaro Arrue, IDIADA)
c) Regulatory Needs (Maxime Flament, ERTICO
d) Human Factors (Johann Kelsch, DLR)
e) Decision and Control Algorithms (Daniel Hess, DLR)
2) Report on the Workshop on Standardisation activities organised by IDIADA (30/06/2015)
3) Report from previous events and project activities:
4 11st Automation Working Group meeting (24/01/2014) (agenda, minutes and presentations) available
on VRA website: http://vra-net.eu/news/11th-automation-working-group-meeting-24-january-2014/
Page 24
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 24
a) NordicWay project whose basic idea is to use existing mobile networks for
low-latency and localized V2V/V2I communication (between Finland and
Sweden)
b) Finnish single window authority contact point related to automated vehicle
tests (at the Finnish Transport Safety Agency)
c) Updates on the activities of Adaptive
The minutes and the presentations of they are available on the iMobility Support website5.
4.2.10 “Adaptive Workshop (Paris, France) (23/09/2015)
AdaptIVe held a project workshop on legal aspects of automated driving on 17 September
2015 at Federation of French Car Manufacturers in Paris, France.
The presentations of well-known speakers – being legal or industry experts and
representatives from authorities – outlined challenges and solutions for legal questions
related to automated driving.
Wolfgang Höfs, Head of Sector Strategic Planning and Communication, European
Commission, emphasised the high expectations of the European Commission towards the
project to advance in the field of legal aspects of automated driving. A technical state of the
art and a look at the solutions coming out of the project was then provided by AdaptIVe
Coordinator Aria Etemad, Volkswagen AG and Eric Hilgendorf, Professor of Law, University
of Würzburg. Afterwards, the status of the legal aspects in the European Union and in the
United States was presented by Maxime Flament, ERTICO – ITS Europe as representative
of Vehicle and Road Automation (VRA) and Bryant Walker Smith, Assistant Professor of Law,
University of South Carolina.
The minutes and the presentations of the workshop are available on the official Adaptive
website6.
5 iMobility Plenary meeting (agenda, minutes and presentations) available on the iMobility Support
website: http://www.imobilitysupport.eu/library/imobility-forum/plenary-meetings/2014-7/4th-meeting-
9/29-april-2014
6 http://www.adaptive-ip.eu/index.php/reader/experts-discuss-legal-aspects-of-automated-driving.html
Page 25
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 25
4.3 International Meetings and Workshops
In this session, the International meetings and Workshops organised by VRA support action
or the international initiatives where VRA participated are listed.
Mainly they include the activities organised for the ITS World Congress (organised annually
in different region of the world – Asia, Australia, Europe or America), the participation to the
Trilateral Working Group on automation (see Chapter 3.4) and the involvement in the
activities of the Transportation Research Board, briefly described in the next lines.
Transportation Research Board (TRB is one of six major divisions of the National Research
Council— a private, non-profit institution that is the principal operating agency of the National
Academies in providing services to the government, the public, and the scientific and
engineering communities. As detailed in the official website (7), “The mission of the TRB is to
promote innovation and progress in transportation through research. In an objective and
interdisciplinary setting, TRB facilitates the sharing of information on transportation practice
and policy by researchers and practitioners; stimulates research and offers research
management services that promote technical excellence; provides expert advice on
transportation policy and programs; and disseminates research results broadly and
encouraged their implementation”. TRB organises annual meeting which cover all
transportation modes, with more than 4500 presentations in nearly 800 sessions and
workshops. VRA Support action, as detailed in the next paragraphs, was involved in several
initiatives of the TRB.
4.3.1 Michelin Bibendum Challenge (Chengdu)(11-16/11/2014)
VOLVO (Joakim Svensson) and CTL (Adriano Alessandrini) participated to the Workshop
“Advanced Driving Assistance Systems to Full Autonomous Vehicles: Milestones” in the
context of the “MICHELIN CHALLENGE BIBENDUM” (http://vra-net.eu/michelin-challenge-
bibendum-workshop-advanced-driving-assistance-systems-to-full-autonomous-vehicles-
milestones/) organised in Chengdu, China (11-15/11/2014). VRA supported the preparation
of this round table on deployment of Highly Automated Driving (HAD) interacting with
MICHELIN finalise the list of participants.
VRA took the opportunity of this meeting to reach out to high level decision makers beyond
Japan and US. In particular representatives of the project participated to the Workshop #6
(ADAS to Autonomous vehicle).
During the Workshop several aspects related to Vehicle and Road Automation were
discussed. The following challenges have been identified by the participants as the most
relevant:
Regulatory/legal framework, Liability, Safety, Validation, Cybersecurity, Privacy,
International harmonization, Big data framework
For level 3: human factors – need for a “shared control”? “driver in a concentrated
condition”?
For level 4: 3D connected maps availability
For level 4: implement automation to increase lane capacity and to minimize impact
on the travel demand & energy use
Page 26
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 26
4.3.2 SIP-Adus Workshop (Tokyo) (17-19/11/2014)
VRA participated to the “SIP-adus Workshop on Connected and Automated Driving Systems”
organised in Tokyo (17-18/11/2014) (http://vra-net.eu/sip-adus-workshop-on-connected-and-
automated-driving-systems-tokyo-17-18-nov-2014/). The main topics, discussed in the
Workshop, are listed in Figure 5 which offers an overview of the Program.
Figure 5: Overview of the Program of the SIP-adus Workshop
4.3.3 Trilateral Automation Working Group in Road Transportation
meeting (Tokyo) (19/11/2014)
The Trilateral Automation Working Group meeting was held the 19/11/2015 in the same
venue of the SIP-ADUS Workshop.
The main topics discussed were:
1) Digital Infrastructure
a. “Digital Map” was presented as a good example of the Digital Infrastructure by
Jun Shibata (MLIT)
b. “ADASIS” was presented by Maxime Flament (ERTICO – ITS Europe)
c. a “Proposed Concept of Operation” was presented by Carl Andersen (US
DoT)
2) News from each region an discussion, including the status of research programs
3) The structure of the “Master Document/Internal Report” that should be used to keep
trace of the activity of the Trilateral WG.
4) The next SIP International Workshop
Page 27
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 27
Digital Infrastructure
This meeting theme ‘Digital Infrastructure’ included the following presentations:
Digital Map (1) was presented as a good example of the Digital Infrastructure (Jun Shibata) .
Questions, discussion and comment were:
technologies and their positioning-accuracy technology was used only for test
vehicles. GNSS does not provide the required accuracy for lane positioning. GPS,
GLONASS, and camera were discussed.
A reflection problem exists with GPS in metropolitan environment (Japan rep)
positioning accuracy enhancement activities - research is underway. DRM is
quintessentially provided as infrastructure for a whole nation. The term ‘sidewalk’ in
geometric feature includes all regarding road side features (Japan rep)
TC204 WG3 scope and stand –the current status to deal with emerging features was
explained and discussed. WG3 currently does not include emerging features in
location reference (Japan rep)
European map maker status explained –map makers are reluctant to link with
standardization due to issues including patent cost or market demand (EU rep)
What is expected for auto makers - information sharing through cooperation (US rep)
Some information from the SIP presentations was provided in this group meeting. The
status quo of information sharing between the public and private (auto maker and
map providers) in three regions was discussed, and on-going competitiveness in
business field was noted.
What the public can contribute for map creation and what the public can do through
the cooperation with private industry was discussed
‘ADASIS’ was presented (Maxime Flament). Questions, discussion and comments were:
An issue in Europe is ‘data border line’ between the field for common and for the
private competitiveness. The field for cooperation needs to be identified (EU rep)
Understanding of the interface is needed in order to provide required data for
connected vehicles or automated vehicles. The ADASIS interface and V2I use case
helps to identify what data the public should provide to the map makers (US rep)
Since map maintenance cost is very high, a flexible operation concept which can
cover three regional differences in Digital Map Infrastructure is needed (US rep)
When information provided to the ERTICO members is transferred to the non-
members, compliance to the stipulated specifications is required, which is posted on
Internet (EU rep)
The first application implemented was for commercial vehicles, due to potential
market scale (EU rep)
“Proposed Concept of Operation” was presented (Carl Andersen)
Data requirements become significant as migration progresses from manual to
automated vehicle operation, requiring locally provided data to the data provided at
network level (US rep)
‘Table 4 Rough Mapping of Application Areas to digital Map Data element’, which
illustrates data elements and applications relations to indicate fundamental and
Page 28
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 28
conceptual direction, is moving forward. Any comments or feedback is needed on this
(US rep)
Static data and dynamic data can provide images in advance. Before actual driving,
those images allow drivers to prepare for the upcoming situation. Tactical or strategic
driving becomes possible with those images (US and EU reps)
In order to provide flexible supports for those data use in three regions, taking
leadership by this group was recommended (US rep)
As for a start toward this end, data ownership should be identified in our three regions
and need of cooperation for flexible supports is highlighted (US rep)
News from each region and discussion, including status of research programs.
‘Support action for Vehicle and Road Automation network, VRA’ was presented
(Joakim Svensson):
The ‘Scientific Research’ described in the paper is connected with VRA activities.
Research questions will be identified and each individual activity name will be clearly
described in the plan (EU rep)
Evaluation plans in each region were introduced together with VRA (EU rep).
The US 5 year plan for benefit evaluation has just started and will continue till 2019
(US rep)
Japan has not organized detailed work force plan for road map; however, the output
will be identified in the end of fiscal year (Japan rep)
Demonstration is implemented to assess the benefits, which should include broader
reviews such as economical, land use or environmental aspects. Since benefits
embrace problems, (impacts including plus and minus sides). A specific way to lead
automation to bring benefits should be identified (EU rep)
The need to organize an expert meeting for assessment was proposed to understand
assessment methods to be used and their impacts (EU rep)
Safety impact will be focused on first (US rep)
Japan also can contribute in the areas (Japan rep)
Take action to move forward the assessment methodology
To understand impacts of automation promptly is critical in order to give policy-
makers a tool to understand what automation allows or not (EU rep)
Setting up an evaluation program in US-Japan project was recommended (US rep)
Automation Program’ was presented (Kevin Dopart) Technical items I2V and V2V on
cooperative form basis are clearly divided, and in this context, Automatic cruise
control and speed harmonization need to be used with care (US rep)
4.3.4 Trilateral Automation Working Group in Road Transportation
meeting (Washington) (11/01/2015)
In Q7, the international collaboration was mainly focused on the activity of the “Trilateral EU-
US-Japan Working Group on Automation in Road Transport” in short ART WG. From the
European side, three EC DGs participate in the ART WG and work cooperatively on
automation issues of shared interest: Directorate General (DG) for Communications
Page 29
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 29
Networks, Content and Technology (CONNECT), DG Research and Innovation (RTD), and
DG Mobility and Transport (MOVE). The EU stakeholders contributions within the ART WG
have been mainly supported by the iMobility Forum Automation WG and the VRA support
action. In January 2015, Maxime Flament, ERTICO, has been nominated “European co-
chair” of the trilateral EU-US-Japan Working Group on Automation in Road Transport in short
“ART WG”.
The Trilateral ART WG activities are mainly organised around the following six areas that has
been agreed as candidates for more focused efforts:
a) Human Factors
b) Evaluation of Benefits & Impacts
c) Digital Infrastructure
d) Connectivity
e) Roadworthiness Testing
Also, Cyber-security is mentioned but other cooperation groups such as HTG6 are currently
working on the topic.
During Q7 two meetings were held in Washington (11/01/2015) and in La Rochelle (31/03–
01/04/2015). The Agenda reviewed the status of the collaboration areas.
In the Trilateral ART WG held in Washington, January 2015, the following points have been
discussed:
- Regional updates from the different regions (USA, Japan and Europe)
- The structure of the internal record document that will be used to keep trace of the
activity of the trilateral ART WG
- The status of the activity on Digital Infrastructure, considering the points of
discussion mentioned in the previous meeting in Tokyo and a presentation of the
updated draft USDOT White Paper.
- The Evaluation Framework for Automated Vehicle Operations
- The Connected/Automated Vehicle Research Roadmap for the American
Association of State Highway and Transportation Officials undertaken with the
objective of identifying and prioritizing CV/AV research needs.
- The planning of the activity for the Bordeaux ITS World Congress (in particular the
plan of the Special Interest Session to be submitted for the ITS World Congress in
October 2015).
Both EC DG RTD and DG MOVE were represented in the meeting.
In particular, during the discussion on the Evaluation Framework, the possibility of
harmonisation between the activities of the different areas has been foreseen. USDOT has
started a project “Estimation of Benefits for Automated Vehicle Systems”, led by Scott Smith,
aiming to provide US DoT with a framework to estimate the potential safety, mobility, energy
and environmental benefits with the main objectives to identify metrics, develop a framework
Page 30
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 30
for quantifying the impacts, provide a high order assessment of the state of the knowledge
and incorporate current research by other parties.
4.3.5 TRB (Transportation Research Board) 94rd Annual Meeting (11-
15/01/2015)
VRA support action participated with some speakers to the TRB 94rd Annual Meeting held in
Washington (11-15/01/2014).
4.3.6 Trilateral Automation Working Group in Road Transportation
meeting (La Rochelle, France) (31/03-01/04/2015)
In April 2015 (31/03/2015 – 01/04/2015), in La Rochelle,a meeting of the trilateral EU-US-
JPN ART WG, was organised. The focus was to discuss the status and the planning of the
activities for the collaboration areas: Human Factors, Evaluation of Benefits & Impacts,
Digital Infrastructure, and Roadworthiness Testing.
During the first day, some regional updates were provided. An overview of the new project
launched in the UK was presented: GATEway (Greenwich) led by TRL, UK Autodrive (Milton
Keynes/Coventry) led by Arup and Venturer (Bristol) led by Atkins. Deidre O’Really gave a
presentation on the new activities on the regulatory framework and the Code of Practice
published in 2015 in the UK.
A specific session on the Evaluation of Benefits for Automated systems with the presentation
of the activity undertaken by the USA and in particular focused on setting the different
framework elements (Safety, Vehicle Mobility, Energy/Environmental, Regional Mobility,
Transportation System Usage, Accessibility, Land Use, and Economic Analysis) was
organised. Then the FESTA methodology used for conducting Field Operational Tests was
illustrated as a basis for developing a methodology for the evaluation of automation. Yvonne
Barnard (ERTICO) focused on the needs for the evaluation methodology and she illustrated
some requirements. It has been agreed to strength the efforts in order to define a
harmonised framework for the evaluation of benefits. A dedicated meeting will be organised
at the AUVSI/TRB symposium in Ann Arbor (July 2015).
Alvaro Arrue (IDIADA) gave a presentation on the topic “Roadworthiness testing:
Standardisation and certification needs (Alvaro Arrue)” and it was agreed that the WG would
take a specific case study (e.g. platooning) and try to define what is missing for
standardisation and certification.
For Human Factors, it has been agreed that the current EU-US Driver Distraction/HMI WG
would address jointly the human factors of automated vehicles.
For Legal Needs, Maxime Flament provided some updates on the recent activity of the VRA
WP3.2 also reporting on the iMobility Forum Legal Issue held in Brussels the 23/03/2015.
Finally in the section on Digital Infrastructure Carl Andersen presented his proposed survey
“Digital Geospatial Infrastructure for Cooperative and Automated Vehicles” and Ahmed Nasr
discussed in his presentation the current activities in Europe.
As additional points of discussion: Angelos Amditis (ICCS) gave a presentation on his holistic
approach for Automated Transport Systems focusing on the need to bring all the elements
around transport; Richard Bishop (Bishop Consultant) with Bastiaan Krosse (TNO) discussed
some results on-going projects on truck platooning in the Netherlands and in the USA;
Page 31
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 31
Matthieu Graindorge (City of La Rochelle) gave a presentation on the CityMobil2-La
Rochelle’s demo. The Japanese delegation provided an update on the status of the activities
of the SIP-adus illustrating the major development themes of the activities in Japan.
The minutes of the meeting have been circulated and available for the participants of the
working Group.
The minutes of the trilateral ART WG meeting are collected and integrated in common
document, indicated as Internal Report which is updated after every meeting. The
presentations and the minutes are shared among the VRA Consortium and the trilateral ART
participants. They are considered for internal use only.
During the meeting in La Rochelle the following structure of the Working Groups have been
agreed. Two new sub-groups (1) Evaluation and (2) Accessible Transport have been created.
It has been agreed to discuss common ground related to roadworthiness testing (EU) and
validation and verification (US). It has been agreed that the existing Driver Distraction/Human
Machine Interface Working Group will shift its agenda to Human Factors of Automated
Vehicles and work with members of the EU VRA Human Factors Working Group.
In synthesis:
Accessible Transport: The US proposal was accepted for a trilateral subgroup addressing
accessible transportation.
US Co-Chair: Mohammed Yousef, USDOT Federal Highway Administration
Japan Co-Chair: Mark Yawamoto, Toyota/SIP-adus
EU Co-Chair : Adriano Alessandrini, CityMobil2
Evaluation: The USDOT draft “Benefits Assessment Framework” was presented and
discussed, followed by a presentation of the EU FOT evaluation guide. It was agreed that a
new trilateral subgroup would form with the objective of harmonizing the high level evaluation
framework for assessing the impact of automation in road transportation. The first meeting
will be held in Ann Arbor, proximal to AVS15.
US Co-Chair: Scott Smith, USDOT Volpe Center
EU Co-Chair: Innamaa Satu, VTT
Japan Co-Chair: T. Uchimura, MLIT
Roadworthiness testing and certification: Agreed that we will bring this area forward for
consideration by a bilateral and possibly trilateral subgroup.
US lead: Cem Hatipoglu and Frank Barickman, NHTSA
EU lead: Alvaro Arrue, IDIADA and Francois Fischer, ERTICO
Japan may bring someone forward to participate in this subgroup; please copy Mr.
Kanoshima in correspondence for now
Human factors: Agreed that the current EU-US Driver Distraction/HMI WG will migrate to
address human factors of automated vehicles. The Japan representatives at the meeting
said that they hope to make it a trilateral WG. Leadership of the current DD/HMI WG will
Page 32
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 32
need to accommodate additional participants, possibly new co-chairs from EU, and a new
co-chair from Japan, if Japan is able to participate.
Current DD/HMI Co-Chairs: Chris Monk, NHTSA, Johan Engstrom, Volvo
Japan Co-Chair: K. Unoura, MLIT
Digital Infrastructure: Carl Andersen presented the proposed survey “Digital Geospatial
Infrastructure for Cooperative and Automated Vehicles” and it was agreed that all WG
participants should contribute contact information so that the survey could be targeted to an
international group of respondents. ERTICO will host the survey.
US Co-Chair: Carl Andersen, FHWA
EU Co-Chair: Ahmed Nasr, HERE and Maxime Flament, ERTICO
Japan Co-Chair: Dr. Jun Shibata, JDRMA
Legal Issues: The EU will continue to share information on their activities and invite US
observers when possible, but is uncertain about the value of launching a legal subgroup.
US correspondent Ellen Partridge, USDOT
EU correspondent Maxime Flament, ERTICO
4.3.7 EU-US Symposium on Automation (Washington) (14-15/04/2015)
The VRA project coordinator Maxime Flament and Natasha Merat (University of Leeds) have
contributed to the preparation of the “EU-US Symposium on Automation”, organised in the
framework of the initiative “European-US Transportation Research Symposia” to discuss and
compare on-going research topic or theme areas.
The “EU-US Symposium on Automation” was held in Washington (14/04/2015 - 15/04/2015)
and the participation was on invitation only. The project coordinator of VRA was involved as
one of the European Member of the European Selection Committee
During the Symposium the following point has been discussed: “What are the
complementary roles and responsibilities of the actors in a Public-Private ecosystem needed
to drive the evolution of the automated vehicles towards a 21th century mobility system
(integrating and optimising vehicle, user, and infrastructure)?”
Page 33
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 33
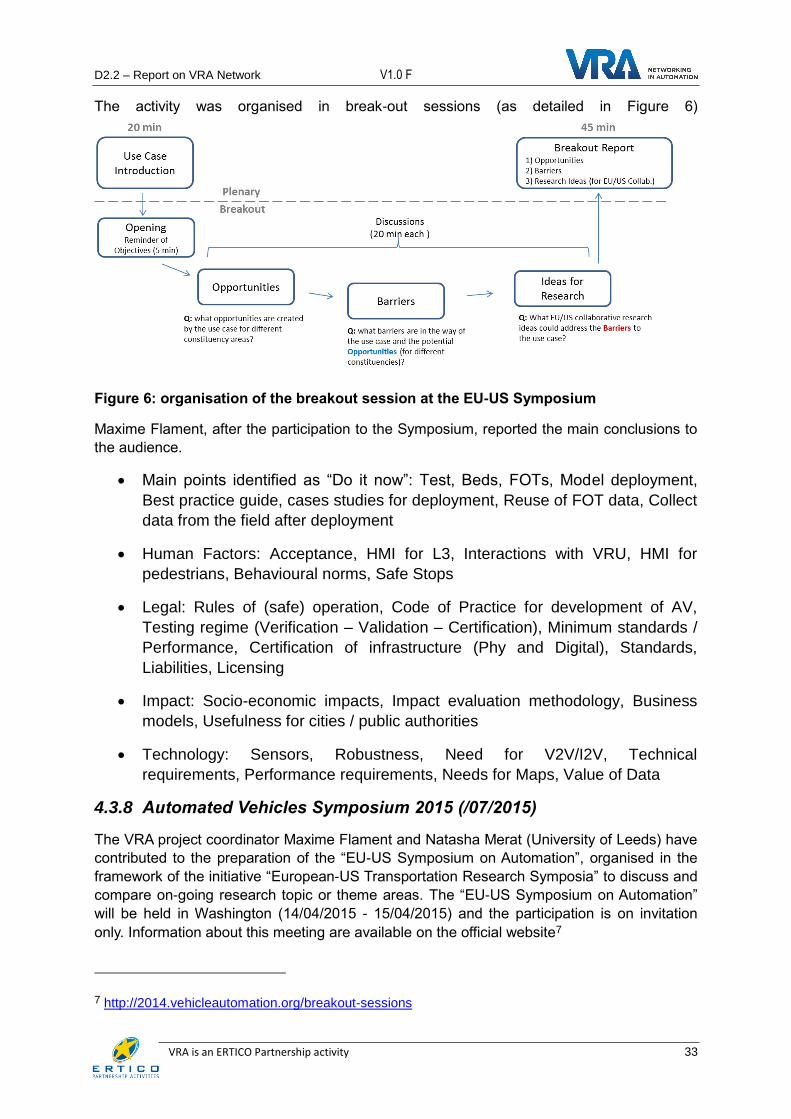
The activity was organised in break-out sessions (as detailed in Figure 6)
Figure 6: organisation of the breakout session at the EU-US Symposium
Maxime Flament, after the participation to the Symposium, reported the main conclusions to
the audience.
Main points identified as “Do it now”: Test, Beds, FOTs, Model deployment,
Best practice guide, cases studies for deployment, Reuse of FOT data, Collect
data from the field after deployment
Human Factors: Acceptance, HMI for L3, Interactions with VRU, HMI for
pedestrians, Behavioural norms, Safe Stops
Legal: Rules of (safe) operation, Code of Practice for development of AV,
Testing regime (Verification – Validation – Certification), Minimum standards /
Performance, Certification of infrastructure (Phy and Digital), Standards,
Liabilities, Licensing
Impact: Socio-economic impacts, Impact evaluation methodology, Business
models, Usefulness for cities / public authorities
Technology: Sensors, Robustness, Need for V2V/I2V, Technical
requirements, Performance requirements, Needs for Maps, Value of Data
4.3.8 Automated Vehicles Symposium 2015 (/07/2015)
The VRA project coordinator Maxime Flament and Natasha Merat (University of Leeds) have
contributed to the preparation of the “EU-US Symposium on Automation”, organised in the
framework of the initiative “European-US Transportation Research Symposia” to discuss and
compare on-going research topic or theme areas. The “EU-US Symposium on Automation”
will be held in Washington (14/04/2015 - 15/04/2015) and the participation is on invitation
only. Information about this meeting are available on the official website7
7 http://2014.vehicleautomation.org/breakout-sessions
Page 34
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 34
5 Information Exchange
5.1 Introduction
As anticipated in Chapter 2.4, one of the objectives of the VRA networking activity is to
search and identify any relevant activity worldwide for Vehicle and Road Automation. In
Chapter 5, the main results of WP2.3 are presented considering the different tools that have
been developed in collaboration with WP4.
5.2 VRA Website
VRA’s website (www.vra-net.eu), described in D4.4.1, is considered as the main
dissemination tool for all news concerning the VRA project.
The Website is used to support the VRA Network and also the exchange of information. In
particular, during the first period of the project the VRA website was used for:
Disseminate the latest VRA-related news on campaigns, achievements, meetings
and events: more than 25 news have been published on events organised by VRA or
relevant initiatives during P2.
Share presentations, reports and any other material to report on the discussion which
took place in the VRA Network activities: stakeholders’ workshop, international
workshops and seminars: all the public presentation and minutes concerning previous
meetings and workshop have been made available according the procedures
described in D4.4.1.
The networking activity was also promoted by listing the activity of the different Discussion
Group and sub-working group in a specific page on the VRA Website8.
5.3 VRA Wiki
In addition, WP2.3 has progressed in the collection of information about existing projects and
studies on Automation from different regions in the world: US DoT and the MLIT supported
the moderation of the Wiki and provided some additional information on their project
integrated in the wiki catalogue of activities by the VRA project coordinator.
During P2, several European Projects or initiatives (e.g. European Truck Platooning
Challenge 2016, FURBOT, CATS, ISI-PADAS, UnCoVerCPS, PEIT, PICAV, GAIN) and also
new launched national projects (e.g. UK DfT Feasibility Study for Heavy Vehicle Platoons on
UK Roads, Venturer, Autodrive, Gateway, DriveMe, CoInCiDE, Cooperatively interacting
Automobiles) have been inserted in the Wiki.
In continuity with the activity of the previous WP2.3 also monitored multiple sources of
information streams such as the annual ITFVHA meetings, AUSVI efforts, TRB joint
committee on Road Vehicle Automation (LinkedIn) and many blogs
(http://smartdrivingcar.com/, http://www.cybercars.fr/, etc…)
8 VRA Website (description of the activity of the working groups): http://vra-net.eu/network/discussion-
groups/
Page 35
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 35
VRA Projects partners have been requested to contribute to the collection of information on
relevant past and current activity, considering the projects in which they are or they have
been involved.
An overview of the current listed present and past activities is summarised in the first page of
the activity catalogue9.
The Wiki is not feed only considering activities but some pages for specific topic have been
created. Currently the a page on the different automation levels, to illustrate the different
definitions, on testing scenarios and a glossary explaining the relevant terms have been
created.
Deliverable D4.2 offers a detailed overview of structure of the Wiki and the updates are
reported in D4.1.2.
5.4 Webinar
The use of Webinars has been planned in WP2.3 to support the exchange of information and
to involve partners, associated partners and relevant experts in the VRA activities to share
information on relevant projects or topics. In the first period of the VRA project the Webinars
listed in this paragraph have been organised.
The Webinar have been always organised with some polls for the audience in order to collect
relevant information on the participants (geographical areas or working sector) or on the
specific topic of the Webinar itself.
The Webinar held in Period 1, reported in D2.1, are listed in Table 2.
Table 2: Overview of the VRA Webinars held in the previous period (P1)
Topic Main speaker/s Main topic/s - Comments
VRA Webinar 1 - “Long
Term Socio-Economic
Effects of Mobility
Automation in Cities”
Adriano Alessandrini
(CTL)
Discussion on the long term
effects for mobility automation in
cities:
- How will the urban ecosystem
change once the road vehicles
will drive themselves?
- What will be the impact of these
changes on industry, citizens and
urban life-style?
Presentations and recorded video
are available on the VRA
Website10
9 VRA Wiki activity catalogue: http://vra-net.eu/wiki/index.php?title=VRA:Community_portal
10 http://vra-net.eu/news/vra-webinar-1-long-term-socio-economic-effects-of-mobility-automation-in-
cities/
Page 36
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 36
VRA Webinar 2 - “Driver
Assisted Truck
Platooning”
Richard Bishop (Bishop
Consulting)
Project funded by FHWA
Exploratory Advanced Research
on truck platooning.
Presentations and recorded video
are available on the VRA
Website11
VRA Webinar 3 -
“Automation @ ITS
European Congress:
main feedback and
highlights”
Dr. Maxime Flament (ERT)
Dr. Panagiotis Lytrivis
(ICCS)
Overview of the main topics on
Automation discussed during the
ITS European Congress
highlighting the main outcomes of
the different initiatives.
Presentations and recorded video
are available on the VRA
Website12
5.4.1 VRA Webinar 4 – “Human Factors in vehicle automation: activities
in the european project adaptive”
This Webinar on Human Factor was organised in collaboration with Dr. Emma Johansson
(VOLVO).
The general objective of this Webinar was to present a quick overview of the on-going and
planned Human Factors related activities in the European project AdaptIVe following the
research carried out in the European projects interactIVe and HAVEit.
The main aim in this part of Adaptive is to investigate how driver’s intentions and actions
should be taken into account in the design of vehicles with different levels of automation. A
range of experiments will be conducted in different experimental environment and on-road
when/if possible.
In Adaptive, Human Factors related functional requirements will be produced: they should
describe on a general level how, when and where information, warnings, interventions as
well as general support should be implemented in continuous driving situations as well as in
event-based support situations, depending on the aim of the function. Intended and
unintended situations and transitions (both system and driver initiated) should be taken into
account.
A specific focus in this Webinar was on driver state assessment.
More than 70 persons participated to the Webinar. All the presentations and a recorded video
of the Webinar are available on the VRA Website13.
11 http://vra-net.eu/news/vra-webinar-2-driver-assisted-truck-platooning/
12 http://vra-net.eu/news/vra-webinar-3-automation-its-european-congress-main-feedback-and-
highlights/
Page 37
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 37
5.4.2 VRA Webinar 5 - “From Advanced Active Safety Systems to
Automated Systems: From interactIVe to AdaptIVe and beyond”
The Webinar was organised in collaboration with Dr. Angelos Amditis (ICCS).
The Webinar focused on the evolution in recent years from driver assistance systems to
automated driving ones. This evolution is based mainly on two large scale EU integrated
projects: interactIVe and AdaptIVe. Research activities, challenges and deployment issues
were presented. The Webinar described the project interactIVe, its objectives, main
outcomes and lessons learned and it will provide an overview of the objectives and vision of
automated driving functions that will be developed in AdaptIVe. Finally an introduction to a
new and holistic approach for automation was given based on the concept of Automated
Transport Systems.
The following presentations were discussed:
1 - VRA Project Introduction (Dr. Maxime Flament, ERT)
2 - From Advanced Active Safety Systems to Automated Systems (Dr. Angelos Amditis,
ICCS)
All the presentations and a recorded video of the Webinar are available on the VRA
Website14.
5.4.3 VRA Webinar 6 – “Cooperative Automation: Activities in the
European Project i-GAME”
This Webinar was organised in collaboration with Bastiaan Krosse (TNO).
The general objective of this Webinar was to present a quick overview of the on-going and
planned activities in the field of communication (V2X) in the European project i-GAME.
The main aim in this part of i-GAME is to develop interaction protocols and message sets in
the context of cooperative automation. Next to the development activities in i-GAME, an
international challenge will be organized in 2016 (GCDC: Grand Cooperative Driving
Challenge). Teams from all over Europe, and also from other continents, will be invited to
participate.
In i-GAME, the developed interaction protocols and message sets will be delivered to the
participating teams and will be part of the challenge by means of two scenarios, one highway
and one urban scenario.
In this Webinar the project was shortly introduced as well as the challenge (including
scenarios) and of course a basic introduction to the interaction protocols and message sets.
During the Webinar the following presentations were given:
13 http://vra-net.eu/news/vra-webinar-4-human-factors-in-vehicle-automation-activities-in-the-
european-project-adaptive/
14 http://vra-net.eu/news/vra-webinar-5-from-advanced-active-safety-systems-to-automated-systems-
from-interactive-to-adaptive-and-beyond/
Page 38
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 38
1 – Introduction to the VRA – Vehicle and Road Automation CSA (Dr. Maxime Flament)
2 - i-GAME Presentation (Mr. Jacco van de Sluis)
3 - Cooperative Automation: Activities in the European Project i-GAME (Mrs. Elham
Semsarkazerooni)
All the presentations and a recorded video of the Webinar are available on the VRA
Website15.
5.4.4 VRA Webinar 7 – “Vehicle Automation: Challenges and
Opportunities for Cities”
This Webinar was organised in collaboration with the project Viajeo Plus (Dr. Yanying Li).
Under the theme “Vehicle Automation: Challenges and Opportunities for Cities”, this Webinar
discussed cities’ experiences on deployment of automated vehicles with a particular focus on
challenges (e.g. economic) and opportunities (e.g. road safety, reduction of CO2 emissions.
Much research work has been carried out to develop and demonstrate the concept of
autonomous vehicles. In the EU, as part of the frameworks of EC co-funded cooperative
project this topic has been promoted since the 1980 with large-scale projects. These projects
have explore the concept of fully automated vehicles, ranging from private vehicles, to buses,
Heavy Goods Vehicles (HGV) to specific vehicles (i.e. on private sites such as university
campuses, car parks, or hospitals). But, why have these technologies not taken off ‘in the
real world’ yet?
Many demonstrations of these technologies have been carried out proving their
effectiveness. More recently Google developed a self-driving car and aims to market it as a
consumer product for the general public. In 2015, the UK government launched a large scale
demonstration of driverless cars in a number of British cities. Despite these efforts, the
exploitation of these technologies and their integration into urban transport schemes remains
a challenge.
This Webinar reflected upon the challenges cities may face when deploying automated
vehicles, and the mechanism by which they might face these challenges.
The following presentations were given:
1 - VRA Introduction (Dr. Davide Brizzolara, ERTICO – ITS Europe)
2 - Viajeo-Plus Introduction (Dr. Yanying Li, ERTICO – ITS Europe)
3 - CityMobil2 La Rochelle’s Demo first results (Mr. Matthieu Graindorge, City of La Rochelle,
France)
4 - GATEway presentation for VRA webinar (Dr. Nick Reed, TRL, UK))
All the presentations and a recorded video of the Webinar are available on the VRA
Website16.
15 http://vra-net.eu/news/vra-webinar-6-cooperative-automation-activities-in-the-european-project-i-
game/
Page 39
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 39
5.4.5 VRA Webinar 8 – “Traffic Management in the Era of Vehicle
Automation and Communication Systems (VACS)”
The Webinar was organised in collaboration with the Prof. Markos Papageorgiou of the
Technical University of Crete (Chania, Greece) who is currently coordinating the TRAMAN 21
project on traffic management (associated partners of VRA).
Traffic congestion on urban road and motorway networks has a strong economic and social
impact. A significant and growing interdisciplinary effort by the automotive industry, as well as
by numerous research institutions, has been devoted in the last decades to planning,
development, testing and deployment of a variety of Vehicle Automation and Communication
Systems (VACS) that are expected to revolutionise the features and capabilities of individual
vehicles within the next decades. If exploited appropriately, the emerging VACS may enable
sensible novel traffic management actions aiming at mitigating traffic congestion and its
detrimental implications.
The Webinar started with a brief introduction to the rationale and impact of traffic
management, along with an overview of expected changes in the years and decades to
come. Existing, planned and emerging VACS, which have an impact on the traffic flow
characteristics, are discussed and classified; and potential implications for future traffic
management are presented. Related research needs and specific tasks and challenges were
identified and commented. Some preliminary results from the ERC project TRAMAN21,
referring to (microscopic and macroscopic) traffic flow modelling, traffic state estimation,
system architecture, local and network-wide control tasks and approaches, were briefly
outlined.
The following presentations were given:
1 - VRA Introduction
2 - Freeway TM in the Era of VACS
All the presentations and a recorded video of the Webinar are available on the VRA
Website17.
5.4.6 Planned Webinars
Table 3 offers an overview of the main topics and contacts for next planned Webinars. The
selected topics offer a wide overview on the main open challenges for the deployment of
road and vehicle automation ranging from technical aspects to human factors.
16 http://vra-net.eu/news/vra-webinar-7-vehicle-automation-challenges-and-opportunities-for-cities/
17 http://vra-net.eu/news/vra-webinar-8-traffic-management-in-the-era-of-vehicle-automation-and-
communication-systems-vacs/
Page 40
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 40
Table 3: topic / projects selected for the next VRA Webinars
Topic/Project Contact person Comments
Activity at the
International World
Congress (ITS World
Congress) held in
Bordeaux
Davide Brizzolara (ERT)
Several feedback have been collected from
the participants to the ITS World Congress
and they could be used for
Tests on fully automated
vehicles
Alberto Broggi
(University of Parma)
Contacted for having discussing some
topics (e.g. “fully automated driving in
cities.”)
Relevant research on
Human Factor
Johann Kelsch (DLR)
Natasha Merat (Leeds)
Nick Reed (TRL)
Requested suggestion for some relevant
topics
D3CoS project Gerals Temme (DLR) -
Response4 (IP Adaptive) Knapp Andreas (Daimler) -
TECNALIA prototypes
(e.g. ADAMproject)
Txomin Rodriguez
(TECNALIA) -
National projects/topics
of research in the
Netherlands
Bastian Knosse (TNO) The activity on Vehicle and Road
automation
HAVEit
Coordinator:
Reiner Hoeger
(Continental)
Project developed seven advanced vehicle
applications (e.g., Queue assistance, brake-
by-wire truck). The project ended in 2011
ABV - Low Speed
Automation
Automatisation Basse
Vitesse
Contact person:
Erdyn Simon Creuchet
ABV ("Automatisation Basse Vitesse" or
Low Speed Automation) is a research
project led by a consortium of academic and
industrial actors under the coordination of
INRETS which aims at proving the technical
feasibility of low speed automation, typically
in heavy traffic conditions. The project is
financed by the French National Agency for
Research (ANR) and is supported by the
French automotive cluster Mov'eo.
COMPANION
Project Coordinator
Magnus Adolfson,
SCANIA AB
This could be an interesting topic when the
project will end
Page 41
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 41
6 Partners and Associated partners
The networking activities of the VRA coordination and support action are mainly supported by
all the VRA beneficiaries, listed in Table 5 (nr. 1-14), who have resources in WP2 with the
support of the associated partners. The list of the beneficiaries has been updated taking into
account the Amendment to the project proposed for the second period. The following
associated partners have been included in the VRA Consortium as beneficiaries:
1) DEUTSCHES ZENTRUM FUER LUFT - UND RAUMFAHRT EV (DLR) - Germany
2) TRL LIMITED (TRL) – United Kingdom
3) RHEINISCH-WESTFAELISCHE TECHNISCHE HOCHSCHULE AACHEN (IKA) -
Germany
6.1 VRA Consortium
The VRA Consortium ensures a balanced participation of different sectors that willing to play
a supportive role to create an international network around vehicle and road automation. All
the beneficiaries have already experiences in European funded activities and are currently
involved in developing European or national activities on the topic (see Chapter 3.2).
The VRA consortium relies on the numerous other contributors to the iMobility Automation
WG who represent the major stakeholders and expert dealing with automation in Europe.
The VRA Consortium ensures the key sector representation (as shown in Table 7).
Table 4: key sector representation
Sector Name
Associations ERTICO
(100 stakeholders in deployment of ITS)
Vehicle
manufacturers
AB VOLVO
(commercial vehicles and Volvo Technology)
Tier1 suppliers DENSO (DE)
Michelin (FR)
Research Centres
and test facilities
ICCS (GR)
IDIADA (SP)
IFSTTAR (FR)
Tecnalia (SP)
TNO (NL)
DEUTSCHES ZENTRUM FUER LUFT - UND RAUMFAHRT EV (DLR)
TRL LIMITED (TRL)
Page 42
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 42
Universities
Uni LEEDS (UK)
Uni Roma (IT)
RHEINISCH-WESTFAELISCHE TECHNISCHE HOCHSCHULE AACHEN (IKA)
The main activities per partner in WP2 are listed below:
1) ERTICO – ITS EUROPE, for WP2.1, mainly contributes to the organisation
international VRA meetings, participation to key international activities in the
framework of the EU-US-JPN collaboration. In WP2.2 it has and Active participation
to VRA international meetings and other key international activities in the framework
of the EU-US-JPN collaboration on automation. In WP2.3, ERTICO – ITS Europe act
as contact for any stakeholders who would like to receive and provide more
information on VRA activities around the world. It invites European and international
stakeholders to present the current state-of-the art in regular webinar and to
contribute to the Wiki. It provides information to non-beneficiaries and it encourages
associated partnership and engagement in the VRA activities
2) VOLVO is WP2.2 Task Leader, co-chair of the imobility Forum Automation WG. Its
activity focused on the organisation of regular Automation WG meetings and
concertation meetings. Its activities aim to extend the role of the Automation WG to
become a concertation group for Automation in Europe, consolidating discussions in
position papers
3) DENSO contributes to expand the international VRA network, to the organisation of
international VRA meetings and to the participation to key international activities in
the framework of the EU-US-JPN collaboration on automation. It is also active in
WP2.2, attending and contributing to the Automation WG and concertation meetings
4) TECNALIA contributes to expand the international VRA network, to the organisation
of international VRA meetings and to the participation to key international activities in
the framework of the EU-US-JPN collaboration on automation. It is also active in
WP2.2, attending and contributing to the Automation WG and concertation meetings.
5) TNO, task leader of WP2.1, is active in the organisation of VRA international
meetings and in the participation to key international activities in the framework of the
EU-US-JPN collaboration on automation. Its representative is co-chair of the iMobility
Forum Automation WG. It organises regular Automation WG meetings and extend the
role of the Automation WG to become a concertation group for Automation in Europe,
consolidating discussions in position papers
6) LEEDS supports the international VRA network and contributes to organisation of
VRA international meetings, participating to key international activities in the
framework of the EU-US-JPN collaboration on automation. It also attends and
contributes to the Automation WG and concertation meetings
7) ICCS supports the international VRA network and contributes to organisation of VRA
international meetings, participating to key international activities in the framework of
the EU-US-JPN collaboration on automation. It also attends and contributes to the
Automation WG and concertation meetings
Page 43
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 43
8) IFSTAR has an active participation to VRA international meetings and other key
international activities in the framework of the EU-US-JPN collaboration on
automation. It is also involved in the contribution to the Automation WG and
concertation meetings, making the link with French competitive cluster (MOVEO,
VEDECOM)
9) CTL has an active participation to VRA international meetings and other key
international activities in the framework of the EU-US-JPN collaboration on
automation. It attends and contribute to the Automation WG and concertation
meetings, preparing discussions leading to European position on automation
10) MICHELIN focuses on the VRA international meetings and other key international
activities in the framework of the EU-US-JPN collaboration on automation. It also
contributes to the Automation WG and concertation meetings
11) IDIADA focuses on the active participation to VRA international meetings and other
key international activities in the framework of the EU-US-JPN collaboration on
automation. IDIADA has resources to attend and contribute to the Automation WG
and concertation meetings, preparing discussion leading to European position on
automation.
12) DLR supports the international VRA network and contributes to organisation of VRA
international meetings, participating to key international activities in the framework of
the EU-US-JPN collaboration on automation. In particular the focus for DLR is on the
topic of Human Factors and Decision and Control Algorithms (DLR is task leader in
WP3.5 and WP3.8)
13) TRL LIMITED contributes to expand the international VRA network, to the organisation
of international VRA meetings and to the participation to key international activities in
the framework of the EU-US-JPN collaboration on automation. It supports the link
with the several initiatives on vehicle automation recently launched in the UK (e.g.
Venturer, Autodrive, Gateway).
14) IKA contributes to expand the international VRA network, to the organisation of
international VRA meetings and to the participation to key international activities in
the framework of the EU-US-JPN collaboration on automation. It supports the link
with the activities of the project AdaptIve (http://www.adaptive-ip.eu/) in which IKA is
active as part of the project consortium.
In WP2.3, for the Information Exchange, all the partners have resources to contribution to the
inventory of relevant activities on Automation and contact lists, contribution to webinars.
6.2 VRA Partners
VRA partners include the beneficiaries (introduced in paragraph 6.1) and the associated
partners. Indeed, the participation of different stakeholders to the activities of the projects as
Associated Partners is promoted by the project. The main roles of the associated partners
are the following:
To maintain an active network of experts and stakeholders
To contribute to international collaboration
To identify deployment needs
Page 44
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 44
To promote the research on vehicle and road automation
In the second period of activity VRA attracted a large group of associated partners. In Table 5
(nr. 12-35), they are listed with the indication, when provided, of the planned resources to be
used for the activities in VRA.
The Associated Partners are organisations of different types: Automotive Industry, Service
Provider, User Organisation, Technology Provider, Research Organisation,
Road/Infrastructure Operator and Others. An overview is provided in Table 7.
Table 5: List of the VRA Partners (Beneficiaries and Associated Partners)
Nr. Partners Acronym Contact Person Planned Resources (WP2)
1
European Road Transport
Telematics Implementation
Coordiantion Organisation S.C.R.L
ERTICO –
ITS Europe Maxime Flament 6.0 PM
2 Volvo Tecnology AB VOLVO Joakim Svensson 4.5 PM
3 Denso Automotive Deutschland
GmbH DENSO
Jean-Michel
Henchoz 3.5 PM
4 Fundation Tecnalia Research &
Innovation TECNALIA Txomin Rodriguez 3.5 PM
5
Nederlandse Organisatie vooe
toegepast natuurwetenschappelijk
onderzoek
TNO Maarten Oonk 3.0 PM
6 University of Leeds LEEDS Natasha Merat 4.5 PM
7 Institute of Communication and
Computer Systems ICCS Angelos Amditis 4.5 PM
8
Institut français des sciences et
technologies des transports, de
l’amenagement et des reseaux
IFSTTAR Sébastien Glaser 2.5 PM
9
Universià degli Studi di Roma La
Sapienza (Centro Studi Trasporti e
Logistica)
CTL Adriano
Alessandrini 2.5 PM
10 Manifacture française des
pneumatiques michelin MICHELIN Antoine Feral 2.5 PM
11 Idiada Automotive Technology SA IDIADA Alvaro Arrue 2.5 PM
12 Deutsches Zentrum Fuer Luft -
Und Raumfahrt - EV DLR Daniel Hess 1.0 PM
13 TRL Limited TRL Nick Reed 0.5 PM
14 Rheinesch-Westfaelische
Technische Hochschule Aachen IKA Felix Fahrenkrog 0.5 PM
- Associate Partners - Resources referred
to all the WPs
15 Centro Technológico de
Automoción de Galicia CTAG Francisco Sanchez -
Page 45
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 45
16
Institut für Softwaresysteme in
technischen Anwendungen der
Informatik Universität Passau
FORWISS Erich Fuchs 5 man-days/year
17 Hellenic Democracy Technical
University of Crete
University of
Crete
Markos
Papageorgiou -
18
TTIS – Okan University
Transportation Technologies and
Intelligent Automotive Systems
Application and Research Centre
TTIS - Okan
University Nejat Tuncay 50 man-days/year
19 Abertis Autopistas Abertis Carlos Fuentes
Alonso -
20 National Institute for Research in
Computer Science and Control INRIA Fawzi Nashashibi -
21 HERE, a Nokia company, HERE Ahmed Nasr -
22 Royal Automobile Club of Cataloni RACC Lluiss Puerto -
23
Institut de la Transition
Energétique pour le véhicule
Décarboné et Communicant et sa
Mobilité (Institute VeDeCom)
VeDeCom Jérôme Perrin 10 man-days/year
24 VisLab srl. VisLab Alberto Broggi -
25
Consorzio Interuniversitario per
l’Ottimizzazione e la Ricerca
Operativa (ICOOR)
ICOOR Mauro dell’Amico -
26 Vialis Vialis Rudi Lagerweij -
27 Chalmers University of Technology Chalmers Stig Franzén -
28 Delft University of Technology TU Delft Riender Happee 20 man-days/year
29
ADAS Management Consulting,
Advanced Driver Assistance and
Safety
ADAS Walter Hagleitner 15 man-days/year
30 Jaguar Land Rover Ltd. JLR Stuart Jackson 12 man-days/year
31 Mouchel Ltd. Mouchel Giles Perkins 52 man-days/year
32 Technische Universiteit Eindhoven TU/e Ben Rutten 5 man-days/year
33 Imtech Traffic & Infra Imtech Jaap Vreeswwijk 4-8 man-days/year
34 CENTRE FOR RESEARCH AND TECHNOLOGY – HELLAS
CERTH Stella Nikolaou 20 man-days/year
35 Barcelona City Council BCC Jordi Ortuño Ribé -
36 European Automotive Research Partners Association
AERPA Margriet Van
Schijndel -
37 Belgian Road Safety Institute IBSR Jean-François
Gaillet 20 man-days/year
38 Renault SAS Renault Christian Rousseau 20 man-days/year
Page 46
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 46
39 University of Wurzburg (Research center Robot-Law)
RobotRecht Eric Hilgendorf -
40 Transport for London TfL Natalia de De
Estevan-Ubeda -
41 Lehrsstuhl fur Ergonomie TUM Bastiaan
Petermeijer -
42 AustriaTech AustriaTech Johannes
Liebermann -
43 International Transport Forum ITF - OECD Tom Voege -
6.3 Overview of the Associates Partners
In this paragraph a short overview of the main activities of the associated partners in
provided.
CTAG
CTAG (www.ctag.com) is an organisation created to offer advanced technological solutions
to the automotive sector. It supports the automotive industry in its permanent quest for
continuous improvement and new technology. CTAG’s mission is to make automotive
companies more competitive through the implementation of new technologies and the
encouragement of research, development and innovation. CTAG offers its supports for the all
tasks of WP2 and WP3.
Forwiss (Univ. Passau)
The Institute for Software Systems in Technical Applications (FORWISS)
(http://www.forwiss.uni-passau.de) at the University of Passau provides expertise in image
and signal processing, optical measurement algorithms, 3D-printing applications as well as in
driver assistance systems, especially for environmental perception. The group has
successfully completed a large number of projects on national and European level including
Ko-PER and several IP sub-projects within PreVENT and interactIVe. It cooperates with a
wide range of major players in the automotive field. Within the area of environmental
perception Forwiss researches focuse on vehicle sensor data fusion and data enhancement
as well as modules for automatic driving. Algorithms for vehicle self-localization, road
boundary detection and generation of compact high precision maps were recently
demonstrated at the Ko-PER and interactIVe final events. In VRA Forwiss offers its support to
the tasks WP2.2 and WP2.3.
University of Crete
The Technical University of Crete (http://www.en.uoc.gr/) is a state university under the
supervision of the Greek Ministry of Education and was founded in 1977. The Technical
University of Crete hosts the institution of the ERC Advanced Investigator Grant TRAMAN21
(http://www.traman21.tuc.gr/) and it expressed its interest in supporting the activities of all the
VRA tasks in WP2 and WP3.
TTIS Okan University
The objective of the Transportation Technologies and Intelligent Automotive Systems
Application and Research Centre (TTIS) (http://arastirma.okan.edu.tr/en/page/transportation-
Page 47
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 47
technologies-and-intelligent-automotive-systems-application-and) is to develop the academic
and technological knowledge required by the Turkish automotive industry, automotive
subsidiary industry and public by doing foresight studies on future transportation systems
and vehicles that work on clean energy, intelligent vehicles, intelligent transportation
systems, unmanned vehicles, robots and robot groups and their modelling, simulation,
design and realization. The TTIS supports the activities of WP3.1 and 3.3.
Abertis
Abertis (http://www.abertis.com/) is the Spanish leader in the tollroads sector. It directly
manages more than 1,500 kilometres of tollroads, covering 59% of all the country’s tollroads,
via the operators acesa, invicat, aumar, iberpistas, aucat, castellana, aulesa and avasa.
Abertis also has a minority stake in several tollroads and tunnels concessions with a total of
245 kilometres: Autema and Ciralsa. Also plays an active role in Accesos de Madrid and
Henarsa, concessions companies which manage several access routes to Madrid City.
Abertis supports the task WP3.1.
DLR
DLR (http://www.dlr.de/) is the national aeronautics and space research centre of the Federal
Republic of Germany. DLR supports in particular task WP2.2, WP2.3 and WP3.1. During the
first period of activity DLR provided a valuable supported focused on the topic of Decision
and Control Algorithms, leading the sub-group of the iMobility Forum Automation Working
Group on this topics.
IKA
The Institute for Automotive Engineering (IKA) of RWTH Aachen University
(http://www.ika.rwth-aachen.de/index-e.php) is Europe’s leading institute in automotive
engineering and directed by Professor Lutz Eckstein. Starting from the idea to innovative
concepts for components and systems up to vehicle prototypes, the staff of the institute
creates and design the future vehicle. In cooperation with car manufacturers and suppliers
IKA makes an acknowledged contribution to help solve current and future global challenges.
IKA contributes to tasks WP2.1, WP2.3 and WP3.1.
Inria
INRIA (http://www.inria.fr/en/) is the French public-sector scientific and technological
organisation specialized in ICT. The department IMARA has been involved over the last 15
years in the application of Information and Communication Technologies in the field of ITS.
IMARA has participated in numerous European research programmes in this field such as
Carsense, DIATS, Stardust, Cybercars, CyberMove, REACT, NetMobil, CyberCars2,
CityMobil, HAVEit and DESERVE. Inria supports all the tasks in WP2 and WP3.
HERE
HERE, a Nokia company, (http://here.com/) is a global leader in the mapping and location
intelligence business. It supports in particular task WP2.1, WP2.2, WP3.1, W3.2. During the
first period of activity HERE provided a valuable supported focused on the topic of Digital
Infrastructure leading the sub-group of the iMobility Forum Automation Working Group on this
topic
RACC
Page 48
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 48
RACC (www.racc.es) is a non-profit-making company dealing with the provision of mobility-
related and assistance services to its members, as well as advice, protection and defence for
motorists, the improvement of road safety, sustainable mobility, and the promotion of motor
sport. RACC in interested mainly in WP2.3, WP3.1 and WP3.2.
VedeCoM
Institut VeDeCoM (http://vedecom.fr/en/) is one of the newly created ITE (Institute for the
Energetic Transition) within the French Government “Investissement d’Avenir”. It is supported
by the Mov’eo Competitiveness Cluster and local community organisations South West of
Paris. VeDeCoM involves more than 40 industrial and academic members who want to
collaborate in pre-competitive and pre-normative research on sustainable individual mobility
in three domains: electric vehicle powertrains, vehicle connectivity and driving delegation,
and shared mobility and energy in terms of new usages, infrastructures and services.
VeDeCOm supports tasks WP3.1, WP3.2 and WP3.3.
VISLAB
VisLab (http://vislab.it/) is one of the key groups worldwide providing top-notch theoretical
and applied research on Environmental Perception in many different fields, including
Intelligent Vehicles, Bui/ding Automation, and Smart SUNeillance. Thanks to its tight
cooperation with top level companies in Europe, America, and Asia, VisLab has developed its
own vision on products for different markets and offers a wide variety of perception and
safety systems. Of particular interest is Vis Lab's involvement in the automotive arena, with
enhanced perception based on low-cost sensors. ViSLAB focuses its interest on WP2.1,
WP2.2, WP2.3 and WP3.1.
ICOOR
The core activities of ICOOR (http://www.icoor.it/php/index.php) concern the design and
development of optimisation methods and algorithms, including decision supports and
simulation models. Design of tailored algorithms for optimisation of automation devices, and
decision support systems to evaluate and assess the impact of different level of Vehicle and
Road Automation are priorities in ICOOR research plans. The study of the impact of the
automation on the user is also a task that ICOOR does in some EU-funded project (e.g.
Deserve). ICOOR identified as of utmost interest the tasks WP2.1, WP2.2, WP2.3 and
WP3.1.
Vialis
Vialis develops, manufactures commissions and maintains (cooperative) roadside systems
for dynamic traffic management, and supports the road operator in managing and optimising
traffic flows on the road network, according to his targets of efficiency, safety and
sustainability. Vialis also provides real time traffic information, based on both roadside and
mobile sources. Vialis identifies of utmost interest the tasks WP2.2 and WP3.3.
Page 49
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 49
Chalmers
Chalmers University of Technology (http://www.chalmers.se/) is a Swedish university located
in Gothenburg that focuses on research and education in technology, natural science,
architecture, maritime and other management areas. Chalmers identifies of utmost interest
the tasks WP2.2 and WP3.1.
TU Delft
TU Delft (http://www.tudelft.nl/en/) is involved in several activities in Vehicle and Road
Automation. It is coordinator of the project “Human Factors of Automated Driving” (HFAUTO),
coordinator of the “Dutch Automated Vehicle Initiative” (DAVI). TU Delft is partner of the
Dutch Integrated Test Cooperative Mobility and it is involved in several activities of education
in human factors, sensing and control for automated driving.
ADAS
As a consultant to the automotive industry, ADAS deals with the topics of vehicle and road
automation on a daily basis. It expressed its interest in the task of WP2.2 and WP3.1.
JLR
Jaguar Land Rover Automotive (http://www.jaguarlandrover.com/gl/en/) is a British
multinational automotive company. JLR identifies of utmost interest all the tasks WP2 and
WP3.
Mouchel
Mouchel (http://www.mouchel.com) is a leading infrastructure and business services group
that works in partnership with its public services’ clients to improve the day-to-day lives of
millions of people.
Mouchel is the no. 1 ITS consultancy in the UK (CIHT rankings 2013) and it operates 4 of
Highways Agency Asset Support Contract (ASC) in England as well as the National Traffic
Service (NTIS). Mouchel also provides advice to the Highways Agency with regards to the
National Roads Telecommunications Service (NRTS) which includes the Agency’s fibre optic
and traditional communications networks. It provides multi-disciplinary services across the
whole highways life-cycle from transportation and environmental modelling through to
infrastructure design and asset management.
Mouchel developed the principles underpinning “hard shoulder running” on England’s
motorways and have been at the forefront of the thinking from the first pilot on the M42
through to the latest generation designs being deployed across the network. Mouchel
approach to the consideration of hazards and risks underpins the safety principles of this
major plank in UK highway policy.
Mouchel is actively examining the vehicle and automation sector with a particular interest in
the potential impacts upon network operations and it wish to contribute our significant
expertise to WP2.2 and WP3.2.
TUe Eindhoven
Eindhoven University of Technology (TU/e) (https://www.tue.nl/) is a research university
specializing in engineering science & technology. TU/e practices and preaches a multi-
disciplinary system approach, both in education and research. Within TU/e’ Strategic Area
Page 50
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 50
Smart Mobility, over 200 researchers contribute every day to make mobility and transport
more intelligent and productive, and make vehicles safer, cleaner and more efficient. The
TU/e is holding a great deal of expertise in the fields of Intelligent Transport Systems,
Automotive Technology, Logistics and Planning Systems, and ICT/Embedded Systems.Tue
Eindhoven identifies of utmost interest all the tasks WP2 and the tasks WP3.1 and WP3.3.
Imtech
Imtech (http://imtech.com/EN) participates to research, development and deployment of
cooperative ITS with special attention to road infrastructure systems and dynamic traffic
management. To that end, Imtech participates in various national and European projects,
international collaboration (e.g. EU-US Task Force, Harmonization Task Group) and
standardization (e.g. ETSI, CEN and ISO). Imtech is particularly interested in tasks WP2.1,
WP2.2, WP3.1 and WP3.3.
CERTH
The Centre for Research and Technology-Hellas (CERTH) (http://www.certh.gr/root.en.aspx)
is the only research centre in Northern Greece and one of the largest in the country and it
was founded in 2000. CERTH has important scientific and technological achievements in
many areas including: Energy, Environment, Industry, Mechatronics, Information &
Communication, Transportation & Sustainable Mobility, Health, Agro-biotechnology, Smart
farming, Safety & Security, as well as several cross-disciplinary scientific areas. CERTH
includes the Hellenic Institute of Transport (HIT) Land, Sea and Air Transportation as well as
Sustainable Mobility services. CERTH identifies of utmost interest all the tasks WP2.1,
WP2.2, WP2.3 and WP3.1
BCN
BCN (http://www.bcn.cat/en/) considers of utmost interest the development and efficient
deployment of cooperative ITS solutions. These solutions will enhance (current available and
future) automated vehicle technologies, but requires the involvement of many stakeholders.
In this context, Barcelona City Council, Abertis Telecom, IDIADA, RACC and Robotics Dept.
of the UPC (Polytechnic University of Catalonia) have decided to set-up an Executive Board
of Stakeholders for the development of initiatives and business models in the field of
cooperative and automated driving, heading towards development of use cases where fully
autonomous driving are also feasible. BCN identifies of utmost interest the tasks WP2.1,
WP2.2, WP2.3 and WP3.1.
AERPA
Founded in 2002, EARPA (http://www.earpa.eu/) is the association of automotive R&D
organisations. It brings together the most prominent independent R&D providers in the
automotive sector throughout Europe. Its membership counts at present 49 members
ranging from large and small commercial organisations to national institutes and universities.
EARPA is the platform of automotive researchers and is actively contributing to the European
Research Area and the future EU RTD funding programmes.
EARPA has two dedicated Task Forces whose work is related to the VRA objectives: TF
Safety and TF Electronics and Communication Systems. Their members and activities can
be used in providing VRA with input, but also for dissemination.
Page 51
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 51
IBSR
BRSI advises the federal minister in charge of the road safety and mobility on ITS related
matters. It contributes to the development of laws enabling the deployment of those
technologies. BRSI performs research on and evaluates new road traffic measures. It also
advises authorities on measures to be taken to suppress black spots. The institute is also in
charge of controlling the equipment of periodic technical inspection and to homologate a
number of devices (helmet, alcohol measurement systems, etc.). As adviser, evaluator and
actor in the homologation sector, BRSI can benefit from the VRA network and provide the
initiative with Belgian views on issues and potential solutions.
Renault
Renault will support the discussion regarding research and advanced engineering on
delegated driving and autonomous cars and light commercial vehicles.
Würzburg University, Research Centre Robot Law
In the middle of 2012, the research Centre of robot Law was founded at the department of
Criminal law, criminal Justice, Legal theory, Information and Computer Sciences Law of the
University of Würzburg.
The objective of the research centre is to analyse the current technological demands within
the field of automated systems and to assess the development from the legal point of view.
The question whether “autonomous actions” are subject to civil and criminal liability are as
much discussed as the legal handling of human-machine-interfaces (HMI); as for instance
how to deal with nanobots, artificial parts of the body and sensory organs from the legal
perspective. It is not only the use of automated systems which has to be assessed but also
the public law has to be taken into account. The most important matter is whether current
legislation is sufficient with respect to the present and future problems occurring with
reference to robotics/automate systems or whether there is a need to establish new norms
and regulations.
The dominant objective is to go along with the technological development and to help to
establish a new system of rules. An intensive dialogue with suppliers, manufacturers, users
and researchers is necessary to reach the above mentioned intention. Furthermore,
sociological, culture, philosophical issues need to be addressed. Finally, it has to be
examined how other legal systems react to the technological progress in the field of
automated systems. The research centre Robot-Law has participated in some national and
international projects concerning new technologies e.g. AUTONOMICS-New generations of
autonomous, simulation-based systems challenging legal framework conditions,
AUTONOMICS for Industry 4.0, AdaptIVe etc.
Transport for London
Transport for London (TfL) is working on scenarios for automation in London, including
strategies for deployment with a view to pilot. In the UK, TfL is working with the Department
for Transport (DfT) and the Department for Business, Innovation and Skills (BIS) as an
Advisor in the trials for Driverless Cars Consortia. TfL is also involved in matters regarding
the UK’s regulatory review. TfL is actively engaged with the motor manufacturers and other
industry leading partners in taking forward the connected mobility agenda leading to
automation. TfL continues to be heavily involved in the global scene through working
relationships in the US, Far East and Europe. TfL has taken part in the review of the
Page 52
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 52
roadmaps for pan European implementation of automation via ERTRAC (European Road
Transport Research Advisory Group). TfL is also a nominated member of the European
project CITYMOBIL2 Reference Group, representing the urban perspective. TfL is also part
of the EU delegation in talks with the US on automation developments (EU-US Symposium)
as well as an active participant in the on-going discussions with Japan on Automation as part
of the SIP-ADUS initiative and also in the context of TfL’s advisor role to Tokyo2020.
Lehrsstuhl fur Ergonomie
Lehrsstuhl fur Ergonomie is partner in the ITN Marie Curie HFauto project (employing two
ESR’s). Several PhD candidates are involved in human factor research focused on
automated or cooperative driving. Topics are including driver state interference, multimodal
interface design, and take-over manoeuvres.
AustriaTech
As agency of the Ministry of Transport, Innovation and Technology, AustriaTech is very
ambitious to push and simulate R&D activities in Austria. The main activities at the moment
are writing of a policy brief for BMVIT and various activities within H2020 projects.
AustriaTech is 100% owned by the Federal Ministry of Transport, Innovation and Technology
International Transport Forum
The International Transport Forum at the OECD is an intergovernmental organisation with 57
member countries. It acts as a think tank for transport policy and organises the Annual
Summit of transport ministers. ITF is the only global body that covers all transport modes.
The ITF is administratively integrated with the OECD, yet politically autonomous.
The International Transport Forum published recently reports on modelling of urban impacts
and on regulatory issues relating to vehicle automation. Next year a roundtable meeting is
planned on the issue.
Page 53
D2.2 – Report on VRA Network V1.0 F
Table 6: Tasks indicated by the associated partners of utmost importance
Associated
Partner
WP2.1
Support the
international
task force
WP2.2
Support the
iMobility Forum
Automation WG
WP2.3
Contribute with
information on
existing research or
deployment
activities in ashared
wiki
WP3.1
Contribute to define deployment paths & scenarios and investigate socioeconomic
implications of
vehicle automation
WP3.2
Contribute to
legal, liability,
insurance and
regulatory
issues
WP3.3
Contribute to standardisation, compliance and certification for vehicle and road
automation
CTAG X X X X X X
FORWISS - X X - - -
Crete
University X X X X X X
TRL X X X X X X
Okan
University - - - X - X
Abertis
Autopistas - - - X - -
DLR - X X X - -
IKA X - X X - -
INRIA X X X X X X
HERE X X - X X -
RACC - - X X X -
VeDeCoM - - - X X X
Page 54
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 54
ViSLAB X X X X - -
ICOOR X X X X - -
Vialis - X - - - X
Chalmers - X - X - -
TU Delft X X X X X X
ADAS - X - X - -
JLR X X X X X X
Mouchel - X - X - -
TU/e X X X X - X
Imtech X X - X - X
CERTH X X X X - -
BCC X X X X - -
EARPA - X - X - X
BRSI - - - X X X
Renault X X X X X X
Würzburg
University - - - - X -
Transport for
London X X - X X X
TUM - - X - - X
AustriaTech - X - X X -
ITF X X - - - -
Page 55
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 55
Table 7: Overview of the Associated partners type of organisation
Associated Partner
Automotiv
e Industry
Service
Provider
User
Organisation
Technology
Provider
Research
Organisation
Road/
lnfrastructure
Operator
Other
CTAG X X
FORWISS X
Crete University X
TRL X
Okan University X
Abertis Autopistas X
DLR X
INRIA X
HERE X
RACC X
VeDeCoM X
ViSLAB X
(Start-up)
ICOOR X
Vialis X X
Chalmers X
TU Delft X
ADAS X (Consulting)
Page 56
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 56
JLR X
Mouchel X X X
TU/e X
Imtech X X
CERTH X
BCC X (Public
Administration)
EARPA
X (association
of automotive
research
organisations)
BRSI X X
Renault X
Würzburg University X
Transport for London X
X (Integrated
Transport
service
provider)
TUM X
AustriaTech X
ITF
X(intergovern
mental
organisation)
Page 57
D2.2 – Report on VRA Network V1.0 F
7 Conclusions
The report on the VRA networking activities proposed in this deliverable illustrated the main
results of the VRA coordination and support action for the activities identified in WP2: create
an active European network of experts and stakeholders and contribute to the EU-US-JAPAN
international collaboration.
Considering the list of international activities (reported in Chapter 0), VRA successfully
fostered the international collaboration supporting the participations of several partners at
international meetings and workshops. VRA established a fruitful dialogue with the main
international actors (EC, US DoT and MLIT) and helped to coordinate the European efforts in
these international activities, often acting as organiser for several initiatives.
The international collaboration was effectively supported by the VRA activities in European
concertation. As reported in Chapter 4.2, several meetings and workshops at European level
were organised. These efforts offered to the participants the possibility of discussing issues
together in a collaborative way. Several European initiatives (EC funded projects, national
initiatives, etc…) were involved in the meetings and the common relevant topics of
discussion were addressed by specific working groups, also considering the needs reported
by the Automation working group.
WP2.3, as reported Chapter 5, identified several activities worldwide on vehicle automation
and supported the information exchange by using the tools provided by WP4. In particular, a
positive feedback has been given by the audience for the Webinars which have been
organised on different topics. They have been evaluated as a very good tool for the
promotion of activities and the exchange of information.
Considering the current results, the structure of the WP2 “Networking Activities” has shown
its effectiveness in the involvement of the partners and in supporting international
collaboration and European concertation.
In the second period of the project, considering the successful results of the first period, the
following activities will be highlighted:
The support to a position paper to consolidate the discussions (in collaboraboration
with the iMobility Forum), as complementary activity to the work of WP3 on the
deployment needs.
The organisation of international initiatives in particular focusing on the opportunities
offered by the ITS World Congress held Bordeaux in 2015.
The organisation of Webinars on the identified relevant topics in Section 5.4.5,
considering the interest and the participations of a wide audience in the previous
period.
Page 58
D2.2 – Report on VRA Network V1.0 F
VRA is an ERTICO Partnership activity 58
8 Bibliography
1. VRA official webpage. [Online] 2014. http://vra-net.eu/.
2. CityMobl2 Homepage. [Online] 2012. http://www.citymobil2.eu/en/.
3. Adaptive Home Page. [Online] 2014. https://www.adaptive-ip.eu/.
4. i-Game Home Page. [Online] TNO, 2014. http://www.gcdc.net/i-game.
5. AutoNet 2030 Homepage. [Online] http://www.autonet2030.eu/.
6. Companion Homepage. [Online] 2014. http://www.companion-project.eu/.
7. Transport Reserach Board - official webpage. [Online] 2014.
http://www.trb.org/AboutTRB/AboutTRB.aspx.