Research ArticleFuzzy Control for Seismic Protection of SemiactiveBase-Isolated Structures Subjected to Near-Fault Earthquakes
Dahai Zhao and Yongxing Li
School of Civil Engineering and Mechanics Yanshan University No 438 Hebei Road Qinhuangdao Hebei China
Correspondence should be addressed to Dahai Zhao zhaodhysueducn
Received 22 October 2015 Accepted 6 December 2015
Academic Editor Filippo Ubertini
Copyright copy 2015 D Zhao and Y Li This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
This paper proposes a new fuzzy logic controller which is designed for seismic protection of base-isolated structures utilizingpiezoelectric friction damper against near-fault earthquakes for different ground sites According to the elastic design spectrumthat Eurocode 8 recommends one 5 damped elastic design spectrum for Chi-Chi earthquake is proposed to generate artificialearthquakes of different ground sitesThe proposed controller employs a hierarchic fuzzy control algorithm in which a supervisoryfuzzy controller governs a sublevel fuzzy controller by altering its input normalization factors according to current level of groundmotion In order to simultaneously reduce the base displacement and superstructure responses of the base-isolated structure duringseismic excitations genetic algorithm is employed to optimize the supervisory fuzzy controller and the preload of piezoelectricfriction damper The efficiency of the proposed controller is also compared with passive controller and a linear quadratic Gaussoptimal controller Numerical results show that the proposed fuzzy logic controller has favorable performance in mitigating theresponses of the base-isolated structure
1 Introduction
Base isolation has been demonstrated to be an effectivetechnique that is used in seismic protection of crucial civilengineering structures In order to mitigate the displacementof base-isolated structures some designers usually installeddampers on isolation floor [1] However the performanceof base-isolated structures against near-fault earthquakes hasbeen questioned by several researchers [2 3] Near-faultearthquakes have the characteristic of long duration pulseswith peak velocities in contrast to far-field earthquakes [4 5]Also the long period of near-fault earthquakes coincideswith the fundamental period of the base-isolated buildings[6 7] Therefore near-fault earthquakes possess much largercollapsing force for base-isolated structures than far-fieldearthquakes on account of resonance effect Among the near-fault earthquakes in recent years Chi-Chi earthquake hasattracted an attention in the field of seismic engineeringfor its unique motion characteristics and great damageto civil engineering structures This near-fault earthquakecaused more than two thousand people deaths and wreakedhavoc on the public property owing to the reverse oblique
fractures in crustal rocks During the Chi-Chi earthquakeoccurrence scientists collected a large number of seismicrecords for different ground sites Consequently it is essentialto design an appropriate control strategy to protect base-isolated structure under near-fault earthquakes for differentground sites
Although the supplement of dampers could reduce thedamage of base-isolated systems against strong earthquakeexcitations it may also abuse large damping forces and causesignificant magnifications on the acceleration and interstorydrift of the base-isolated structure [8 9] Semiactive controlis an intelligent control algorithm which can regulate theoutput power of dampers according to current condition ofstructure responses Therefore semiactive control has betteradaptability than traditional passive control Furthermoresemiactive control requires less power as compared to activecontrol which uses some powerful actuators to achieve idealeffects For these reasons many researchers have put forwardall kinds of semiactive strategies for seismic protection Inthese semiactive algorithms fuzzy logic control has been apromising strategy because it has the superiority in deal-ing with uncertain complex and nonlinear systems [10]
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2015 Article ID 675698 17 pageshttpdxdoiorg1011552015675698
2 Mathematical Problems in Engineering
Constant acceleration
Constant displacement Constant velocity
S
Saag
25S
TB TC TD T (s)
Figure 1 Design spectrum envelope for Chi-Chi earthquake
Das et al [11] studied fuzzy control for seismic protectionof civil engineering structures using MR dampers Wangand Lee [12] used genetic algorithm to optimize fuzzy ruleto improve the performance of fuzzy control method Todeal with near-fault and far-field earthquake excitationsReigles and Symans [13] proposed a supervisory fuzzy con-troller to regulate two lower-level fuzzy controllers Kim andRoschke [14] proposed GA-fuzzy control method for smartbase-isolated benchmark building using supervisory controlmethod
In this study an improved fuzzy control is proposedfor seismic protection of base-isolated building with piezo-electric friction damper subjected to near-fault earthquakesof different ground sites According to the elastic designspectrum of the Eurocode 8 recommendation a 5 dampingratio elastic design spectrum for Chi-Chi earthquake is pro-posed to generate artificial earthquakes for different groundsites The proposed fuzzy controller employs a hierarchicfuzzy control algorithm which includes a supervisory fuzzycontroller and a sublevel fuzzy controller to alter its inputnormalization factors according to the current level of groundmotions The sublevel fuzzy control is to determine thecommand voltage of piezoelectric friction damper accordingto the velocity and displacement of the base isolation In orderto simultaneously reduce the base displacement and super-structure responses of the base-isolated structure geneticalgorithm is employed to optimize the supervisory fuzzycontrol and preload of piezoelectric friction damper Forcomparison the proposed fuzzy controller is also investigatedwith passive and linear quadratic Gauss optimal controllerA series of time history analyses of a base-isolated structureunder seismic excitations are also conducted to evaluate theperformance of the developed controller
21 Elastic Design Spectrum for Chi-Chi Earthquake In orderto investigate the distinctive characteristics of near-fault
earthquakes some researchers have evaluated the perfor-mance of the near-fault earthquakes and proposed severaljudgment criterions Yang and Zhao [15] proposed a judg-ment for near-fault earthquakes The principles are listedas follows Firstly the ratio between PGV (Peak GroundVelocity) and PGA (Peak Ground Acceleration) is greaterthan 02 s Secondly the Joyner-Boore distance is between 0and 15 Km Thirdly the earthquake should possess obviouspulses with peak velocity Based on the above principles 29seismicwaves for Chi-Chi earthquake under different groundsites are selected from PEER database to generate elasticdesign spectrum In the late 1980s the European Committeefor Standardization released the first European code whichcontained structure design rules andminimum standards forearthquake resistant design With constant renovation forrecent years Eurocode 8 code includes detailed investigationand research on seismic design parameters of differentregions So this code has become the most authoritativeand influential standard in the world [16] According to theelastic design spectrum that Eurocode 8 code recommendsa 5 damping ratio elastic design spectrum for Chi-Chiearthquakes is proposed to generate artificial earthquakes fordifferent ground sites
The acceleration response spectral 119878119886(119879) as shown in
Figure 1 can be given as follows
119878119886(119879) = 119886
119892sdot 119878 sdot [1 +
119879
119879119861
(25 minus 1)] 0 le 119879 le 119879119861
119878119886(119879) = 119886
119892sdot 119878 sdot 25 119879
119861le 119879 le 119879
119862
119878119886(119879) = 119886
119892sdot 119878 sdot 25 sdot (
119879119862
119879)
120572
119879119862le 119879 le 119879
119863
119878119886(119879) = 119886
119892sdot 119878 sdot 25 sdot (
119879119862
119879)
120572
(119879119863
119879)
120573
119879119863le 119879
(1)
where 119886119892is the design PGA of Chi-Chi earthquake 119878 is the
amplification coefficient for different site conditions the cor-ner periods 119879
119861 119879119862 and 119879
119863represent constant acceleration
constant velocity and constant displacement spectral regionand 120572 and 120573 are dimensionless indexes respectively
As shown in Table 1 the selected seismic records areclassified into three categories which are hard medium andsoft soil site respectively The lower and upper limits foreach parameter of different site are listed in Table 2 Duringthe establishment of the design elastic spectrum the PGAis adjusted to 03 g The elastic design spectrum is obtainedby fitting the average response spectrum curve According tothese considerations the design response spectrum for Chi-Chi earthquake is shown in Figure 2 It can be seen from
the figures that the proposed design spectra are conservativecompared to the average spectrum Owing to the longduration pulses the corner periods are larger than that theEurocode 8 recommends
22 Artificial Earthquakes for Different Ground Sites Basedon the above discussions three artificial earthquakes thatare characterized by Chi-Chi near-fault earthquakes underdifferent ground sites are generated by power spectral densityfunction as shown in Figure 3 The artificial earthquakes arecalculated with a time step of 001 s and the PGA is equalto 03 g Artificial earthquakes for hard medium and softsoil site are shown in Figures 4ndash6 respectively From thesefigures it can be observed that the velocity time histories ofthe generated artificial earthquakes possess obvious pulseswith peak velocities Owing to the similar design spectrumthe time histories of the generated artificial for hard site andmedium site are the same despite several nuances However
4 Mathematical Problems in Engineering
0 2 4 6 8 1000
02
04
06
08
10Sp
ectr
al ac
cele
ratio
n (g
)
Period (s)
Design acceleration spectrumMean spectrum
(a) Hard soil site
0 2 4 6 8 1000
02
04
06
08
10
Spec
tral
acce
lera
tion
(g)
Period (s)
Design acceleration spectrumMean spectrum
(b) Medium soil site
0 2 4 6 8 1000
02
04
06
08
10
Spec
tral
acce
lera
tion
(g)
Period (s)
Design acceleration spectrumMean spectrum
(c) Soft soil site
Figure 2 Design spectrum envelopes for Chi-Chi earthquake
Time
d
I(t)
atb tdtc
b c
I(t) = (ttb)2
I(t) = e03(tc minus t)
Figure 3 Envelop for artificial earthquake
Mathematical Problems in Engineering 5
0 2 4 6 8 10 12 14 16 18 20
minus03
minus02
minus01
00
01
02
03
Acce
lera
tion
(g)
Time (s)
(a) Time history of acceleration
0 2 4 6 8 10 12 14 16 18 20
minus09
minus06
minus03
00
03
06
09
Velo
city
(ms
)
Time (s)
(b) Time history of velocity
Figure 4 Artificial earthquakes for hard soil site
0 2 4 6 8 10 12 14 16 18 20
minus03
minus02
minus01
00
01
02
03
Acce
lera
tion
(g)
Time (s)
(a) Time history of acceleration
0 2 4 6 8 10 12 14 16 18 20
minus09
minus06
minus03
00
03
06
09Ve
loci
ty (m
s)
Time (s)
(b) Time history of velocity
Figure 5 Artificial earthquake for medium soil site
0 2 4 6 8 10 12 14 16 18 20
minus03
minus02
minus01
00
01
02
03
Acce
lera
tion
(g)
Time (s)
(a) Time history of acceleration
0 2 4 6 8 10 12 14 16 18 20
minus09
minus06
minus03
00
03
06
09
Velo
city
(ms
)
Time (s)
(b) Time history of velocity
Figure 6 Artificial earthquake for soft soil site
6 Mathematical Problems in Engineering
the time history of the generated artificial earthquakes for softsoil is distinct with the other Particularly the peak velocityreaches 09ms which is significantly greater than the other
3 Model of Base-Isolated Structure andPiezoelectric Friction Damper
31 Equation of Motion for Base-Isolated Structure Consideran n-degree of freedom base-isolated structure with a piezo-electric friction damper at the isolation floor the dynamicequation of the base-isolated system is given by
where M C and K represent 119899 times 119899 mass damping andstiffness matrices respectively X(119905) X(119905) and X(119905) are theacceleration velocity and displacement vectors respectivelyU(119905) is the control force generated by the piezoelectric frictiondamper and
119892(119905) is the earthquake acceleration
Rewriting (2) in state-space form gives
Z (119905) = AZ (119905) + BU (119905) + E119892(119905) (3)
where
Z (119905) = [X (119905)X (119905)
]
E = [0119899times1
Mminus1E119904
]
B = [0119899times1
Mminus1B119904
]
A = [0119899times119899
I119899times119899
minusMminus1K minusMminus1C]
(4)
32 Model of Piezoelectric Friction Damper Piezoelectricfriction damper is a novel semiactive control device whichutilizes piezoelectric stacks to regulate the damping forceto provide a satisfying level of friction force Recently theauthors also proposed a piezoelectric friction damper andinvestigated their performances theoretically and experimen-tally [17]
During the movement of the base-isolated structure afriction damper has two possible motion states sticking andslipping phases [18 19] The friction force of the piezoelectricfriction damper is given as [20]
minus120583119873 (119905) le 119891 (119905) le 120583119873 (119905) = 0
(5)
where 119873(119905) is the total contact force 119873pre represents thepreload of the piezoelectric friction damper 119862pz is thepiezoelectric coefficient of the piezoelectric actuator 119881(119905)is the input voltage of piezoelectric stack actuator 120583 is the
Table 3 Parameters of piezoelectric friction damper
friction coefficient of the damper sgn(sdot) represents the signfunction related to the slip rate of the damper and 119891(119905)denotes damping force of piezoelectric friction damper
However the static state of the piezoelectric frictiondamper is complex to be estimated Shook et al [21] proposedan approximate calculation formula for the sticking frictionforce as given in the following
119891119904= minus120583119873 (119905) sgn ()
when 119891119904=1003816100381610038161003816119891119894 + 119891119903
where 119891119894is the inertial force applied on the mass 119891
119903is the
restoring force provided by the isolation bearing 119898119894is the
mass of the superstructure 119898119887and 119896
119887are the mass and
stiffness of base isolator and 119909119887is the displacement of base
isolatorThe parameters of piezoelectric friction damper are listed
in Table 3 And the preload of the piezoelectric frictiondamper can be optimized by genetic algorithm
4 GA-Based Hierarchic Fuzzy ControlAlgorithm
41 Framework of the Developed Fuzzy Logic Controller Thecontroller adopts a hierarchic fuzzy control algorithm inwhich a supervisory fuzzy controller governs a sublevelfuzzy controller by altering its input normalization factorsaccording to the current level of groundmotionThe sublevelfuzzy logic controller is designed to determine the commandvoltage of piezoelectric friction damper according to thevelocity and displacement of base isolation Piezoelectricfriction damper regulates the damping force according tothe input voltage Genetic algorithm is employed to optimizesupervisory fuzzy controller and preload of piezoelectricfriction damper according to an objective function and thegenerated artificial earthquakes for different ground sitesTheblock diagram of the system for the developed controller isshown in Figure 7
42 Sublevel Fuzzy Controller The sublevel fuzzy controlleris established in order to determine the command voltage ofthe piezoelectric friction damper The isolation displacementand velocity are selected as two input variables and commandvoltage is employed as a single output variable as shown inFigure 8The definitions of themembership function of input
Mathematical Problems in Engineering 7
Ground motion
Damping force
Semiactiveisolated
structure
Piezoelectricfriction damper
Ground velocity
Optimize
Voltage
Structural response
Isolation velocity and displacement
Sublevel fuzzycontroller
Supervisoryfuzzy controller
Optimize
Genetic algorithm
Nd
N
Figure 7 Block diagram of the base-isolated system for the fuzzy controller
minus10 minus05 00 05 100
1PL
PMPSZENSNM
Deg
ree o
f mem
bers
hip
Normalized displacement
NL
00 05 100
1PL
PMPSZENSNM
Deg
ree o
f mem
bers
hip
Normalized velocity
NL
0 200 400 600 800 10000
1VL
LMS
Deg
ree o
f mem
bers
hip
Voltage (V)
ZE
minus10 minus05
Figure 8 Input and output membership functions of sublevel fuzzy control
variables are as follows NL negative large NM negativemedium NS negative small ZE zero PS positive small PMpositive medium and PL positive large The definition ofthe membership function of output variable is as follows ZEzero S small M medium L large and VL very large Themembership functions are employed Gaussian type for inputand output variables The fuzzy control rules are defined inTable 4
In the establishment of fuzzy control rules it followsthe following principles if the isolation displacement andvelocity are in opposite sign then the output voltage becomessmall in order to ensure output small damping force inthe piezoelectric friction damper Contrarily if the isolationdisplacement and velocity have the same sign the outputvoltage becomes large Certainly when the displacement andvelocity are almost zero or small the command voltage is
8 Mathematical Problems in Engineering
Table 4 Fuzzy control rules adopted for sublevel fuzzy control
Velocity ofisolated floor
Displacement of isolated floorNL NM NS ZE PS PM PL
NL VL VL L L M S ZENM VL L L M S ZE SNS L L M S ZE S MZE L M S ZE S M LPS M S ZE S M L LPM S ZE S M L L VLPL ZE S M L L VL VL
minus1minus05
005
1
minus1minus05
005
1
500
1000
VelocityDisplacement
Volta
ge (V
)
Figure 9 Fuzzy control surface for sublevel fuzzy controller
about zero this means that piezoelectric friction damper actsas a passive friction damper The defuzzification of fuzzycontrol adopts the method of centroid to get a crisp outputvalue The control surface and color-filled contour line ofsublevel fuzzy control are depicted in Figure 9
43 Supervisory Fuzzy Logic Controller In the fuzzy logiccontrol normalization factors need to satisfy a certain objec-tive The oversize normalization factors can enlarge the basedisplacement effectively Contrarily too small normalizationfactors can result in large control force that amplifies theaccelerations of base-isolated structure Thus a supervisoryfuzzy logic control is proposed to adjust its normalizationfactors in real-time As discussed earlier near-fault earth-quakes usually have long duration pulses with peak velocitiesThus the supervisory fuzzy control employs ground velocityas single input variable to identify the characteristics ofthe ground motion The normalization factors of sublevelfuzzy control are selected as two output variables HereGaussian membership functions are used for input andoutput variables as shown in
120583gauss = exp[minus(119909 minus 119888)2
21205902] (7)
where 119888 and 120590 are the constant values that define the shape ofthe Gauss functions respectively
The rules of the supervisory fuzzy controller are definedby the following form
Rule119894 IF 119883 is 119860119894 then 1198841is 1198621198941 1198842is 1198621198942
119894 = 1 2 119872
(8)
where119872 is the number of fuzzy control rules 119883 is the inputvariable 119884
1and 119884
2are the output variables 119860119894 119862119894
1 and 119862119894
2
are the linguistic values characterized by input and outputmembership functions respectively One fuzzy control ruleis described by three Gaussian membership functions andeach membership function can be defined by two parameters(119888 and 120590) Therefore a total of five fuzzy control rules canbe optimized by encoding these two parameters into thegene using genetic algorithm Consequently a total of 30parameters are encoded into the chromosome to define theinference system of supervisory fuzzy controller as shown inFigure 10
Similar to normalization factors the preload of thepiezoelectric friction dampers has a great influence on thedamping effect Thus it is essential to establish an effectivesupervisory fuzzy logic controller and a suitable preloadof piezoelectric friction damper Generally for the seismicprotection of a base-isolated structure there is a trade-off between the isolation displacement and superstructureacceleration The main control objective is to depress theisolation displacementwithout excessively increasing acceler-ation response of the superstructure In this section a geneticalgorithm is employed to seek out an optimal solution forthe control of the base-isolated structure The flow chart ofgenetic algorithm is shown in Figure 11
Genetic algorithm is a computational model for thesimulation of Darwin natural genetic selection and biologicalevolution Different from the traditional search algorithmgenetic algorithm begins to search a group of optimal solu-tions from an initial random population by mutation andrecombination Each individual which consists of a set ofbinary strings is a solution to the objective problem Afterinitialization genetic algorithm uses a sort method to rankindividuals It compares each solution with other solutionsin the population to find whether it is dominated Duringthe process of creating a new generation it selects a suitableindividual according to the size of the fitness value Afterseveral generations the individual value gradually convergesto the best chromosome which is the optimal solution
The objective fitness function employed in this study isshown as follows
119869 = 06 times119910119887max
119910119887max
+ 04 timesradicsum119899
119894=1(119886119894max119886119894max)
2
119899 (9)
where 119910119887max and 119910119887max denote the peak base displacements
for the fuzzy control and uncontrolled cases respectively119886119894max and 119886119894max represent the peak superstructure accelera-tion for the fuzzy control and uncontrolled case respectively
The objective of genetic algorithm is tomake the objectivefitness function reach its minimum value by selecting oneset of parameters of supervisory fuzzy control and preload
Figure 10 Encoding structure for genetic algorithm
of piezoelectric friction damper The initial population sizegenetic algebra and crossover probability are set to 20 50and 08 respectively Through inputting the artificial earth-quakes which are characterized by near-fault earthquakesfor different ground sites the supervisory fuzzy control andpreload of piezoelectric friction dampers can be optimizedThe fuzzy control surfaces of optimized supervisory fuzzycontrol are shown in Figure 12
5 Linear Quadratic Gaussian Controller
LQG (Linear Quadratic Gaussian) method is based onKalman filter technique which has become a widely usedcontrol algorithm For comparison purpose LQG is adoptedto regulate the contact normal force of piezoelectric frictiondamper in the study The optimal controller takes groundacceleration as white noise and considers the velocity anddisplacement of base isolation as feedback signals Thecontrol performance index is defined as follows [22]
119869 = lim120591rarr+infin
1
120591
sdot 119864 int
120591
0
[Z (119905)119879QZ (119905) + U (119905)119879RU (119905)] 119889 (119905) (10)
where Q2119899times2119899
and R1times1
are semi-positive definite matrix andpositive definite matrix respectivelyThe control force can beobtained as follows
U (119905) = minusGZ (119905) (11)
G = Rminus1B119879P (12)
where P can be computed by the solution of the Riccatiequation as follows
minusPA minus A119879P + PBRminus1B119879P minusQ = 0 (13)
The control force obtained from the above equation isactive control force which could not be always achieved bypiezoelectric friction damper It is realized that the directionof active control force is opposite to the slipping direction ofpiezoelectric friction damper Therefore the desired controlforce119906
119889(119905) can be achieved according to the following criteria
Whether or not to meet thecondition of convergence
Figure 11 Flow chart of genetic algorithm
where 119906active is the control force obtained from LQG con-troller
119887is the velocity of base isolator119891max and119891min are the
maximum and minimum friction forces of the piezoelectricfriction damper respectively
6 Numerical Simulations
61 Model of the Base-Isolated Structure A five-story base-isolated building which is proposed by He et al is employedto evaluate the performance of developed fuzzy controllers[18] The fundamental period of the five-story building is03 s For the given isolation parameters the fundamentalperiod of the base-isolated building becomes 25 sThereforean isolation ratio 120575 equal to 83 (=2503) is obtainedThe model of the base-isolated structure with piezoelectricfriction damper is shown in Figure 13 The parameters of thebase-isolated structure are shown in Table 5
62 Performance Evaluation Index In order to evaluate theperformance of base-isolated structure for different controlalgorithms a total of nine performance indexes are employedin this study [23] as shown in Table 6
The performance indexes J1through J
5denote the struc-
ture responses for the controlled building normalized byuncontrolled structure respectively The performance indexJ6evaluates the peak control force normalized by the peak
base shear for controlled structure The performance indexesJ7and J8represent RMS (Root Mean Square) base displace-
ments and RMS floor accelerations respectively J9computes
the energy dissipated by friction dampers normalized by theearthquake input energy to the controlled structure
63 Simulation Results and Analysis A total of nine seis-mic excitations that contain six real ground motions andthree artificial earthquakes are selected to evaluate the per-formance of the optimized fuzzy logic controller In thisstudy the time histories of strong earthquake which rangefrom 20 s to 70 s are selected for numerical simulation andanalysis
The numerical results for various earthquakes are listedin Table 7 In the table the Genetic Algorithm HierarchicFuzzy Logic Control is named as GHFLC Moreover forcomparison purpose the results for an optimal controller andpassive operation of friction damper are also listed in thetable Numbers in bold font indicate the best results amongall control cases
Base displacement is an important index to evaluatethe effectiveness for different controllers For a base-isolatedstructure the reduction of base displacement is a primarypurpose to prevent permanent damage for isolation bearingsor adjacent buildings Although passive operation of frictiondampers can successfully reduce the performance indexassociated with the peak and RMS base displacements (J
3and
J7) it causes significant amplification in peak and RMS floor
accelerations (J5and J
8) for most cases due to the passive
control For example as compared to the uncontrolledstructure for TCU052 TCU053 and TCU054 earthquakespassive control leads to 6 45 and 42 amplification inpeak floor acceleration respectively However the proposedfuzzy controller can successfully improve the base-isolatedstructure acceleration at the cost of slight deterioration in theperformance indices J
3and J7on comparison with passive
control For example for TCU052 TCU053 and TCU054earthquakes GHFLC results in 15 13 and 16 decrease inpeak floor accelerations respectively As compared to passivecontrol there are 9 3 and 7 increase in peak basedisplacements
The time histories of friction force and force-displacement curves of friction dampers for differentcontrollers subjected to TCU052 earthquake are shown inFigure 14 From the figures it can be seen that the passivecontrol outputs lager damper force than GHFLC Becausethe supervisory fuzzy control can alter input normalizationfactors of sublevel FLC according to the current level ofground motion there are some serrations presented at theedge of the hysteretic curve of piezoelectric friction damper
The comparison of the performance indexes J3 J7 J5and
J8under different control cases is shown in Figures 15 and
16 respectively From these figures it can be seen that thefuzzy controller is more effective than passive and optimal
Mathematical Problems in Engineering 11O
utpu
t
009
055
026
000033
000094000
Input ground velocity (ms)
Nd
N
(a) Hard soilO
utpu
t
Input ground velocity (ms)
071
042
000
008000
037
103000
Nd
N
(b) Medium soil
Out
put
Input ground velocity (ms)
107
053
000045
011000
117000
Nd
N
(c) Soft soil
Figure 12 Control surface for optimized supervisory fuzzy control
PFD
Fixed reference
LRB
Figure 13 Model of the base-isolated structure
12 Mathematical Problems in Engineering
Table 6 Performance index
Peak base shear Peak interstory drift RMS base displacement
controller in simultaneously depressing the superstructureacceleration and base displacement For example the appli-cation of developed fuzzy controller leads to an average of112 decrease in peak floor acceleration and an average ofonly 36 increase in peak base displacement as compared topassive control Particularly optimal controller produces anaverage of only 41 reduction in peak floor acceleration and
leads to 79 increase in peak base displacement as comparedto passive control Therefore the improved fuzzy controlmethod shows better performance than passive and optimalcontrol
In order to further evaluate the performance of differentcontrollers the energy time histories for different controllersare compared with each other For a base-isolated structure
Mathematical Problems in Engineering 13
20 30 40 50 60 70minus20
minus10
00
10
20Fr
ictio
n fo
rce (
kN)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(a) Passive control
20 30 40 50 60 70minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(b) GHFLC method
Figure 14 Time histories of friction force and force-displacement diagram against TCU052 earthquake
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation case
Passive OptimalGHFLC
1 2 3 4 5 6 7 8 903
04
05
06
07
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 15 Comparisons on the performance indexes J3and J7for different control cases
14 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
Excitation case
Passive
GHFLC Optimal
J 8J 5
Figure 16 Comparison of the performance indexes J5and J8for different control cases
with piezoelectric friction dampers installed on the isolationthe energy equations are defined as follows
where 119864119870 119864120585 119864119878 119864119867 and 119864
119868denote the absolute kinetic
energy damping energy elastic strain energy energy dis-sipated by piezoelectric friction dampers and total inputenergy respectively The energy time histories for differentcontrollers against TCU052Chi-Chi earthquake are shown inFigure 17 It can be seen from the figures that the piezoelectricfriction dampers dissipate most of the input energy fordifferent control cases subjected to TCU052 earthquake
In order to compare different effects under near-faultground motions recorded for different sites the average ofinput energy and structure responses subjected to near-faultearthquakes are given in Table 8
As shown in Table 8 the near-fault earthquakes forsoft sites are more destructive than hard sites For instancecompared to hard sites the input energy and the base dis-placement of RMS of the base-isolated structure for soft soil
increase by 143 and 256 respectively However GHFLCpossesses favorable performance under different ground sitesand the damping effect has no distinctly direct relationshipwith site category
As discussed in Section 61 the isolation ratio of thesimulation model equals 83 In order to evaluate the effectsof isolation ratio on the damping performance of GHFLC thestiffness value of isolation is adjusted to 1045 and 452 kNmrespectively Then the numerical results for different valuesof isolation ratio (120575 = 4 6) are obtained The performanceindexes J
3and J5for different isolation ratios are shown in
Figures 18 and 19 respectivelyFor base-isolated structure isolation ratio has a signifi-
cant influence on the isolation effect A larger isolation ratiowhich means a minor stiffness value of isolation usuallyleads to conspicuous enlargement of base displacement anddecrease of superstructural responses due to the increaseof fundamental vibration period and vice versa Howeveras shown in Figures 18 and 19 the shock absorption rateof GHFLC has little change when isolation ratio variesdifferently and the proposed fuzzy control shows favorableeffectiveness in the diverse isolation ratios of base-isolatedstructures
7 Conclusions
In this study an optimized fuzzy logic control which isdesigned for Chi-Chi near-fault earthquakes under differentground sites is proposed An elastic design spectrum isproposed to generate near-fault earthquakes for differentground sitesThe characteristic of the design spectrum is thatit has larger periods and peak acceleration than conventionalspectrum Genetic algorithm is employed to optimize thesupervisory fuzzy controller and preload of piezoelectric
Mathematical Problems in Engineering 15
Table 8 Average ofinput energy and structure responses subjected to near-fault earthquakes
Site classification Input energy (kNsdotm) Base shear (kN) Base displacement ofRMS (m)
Figure 17 Energy time histories subjected to Chi-Chi TCU052 earthquake
friction dampers according to three artificial earthquakesthat are characterized by Chi-Chi earthquakes Passive andoptimal controllers are also compared with the performanceof the developed fuzzy controller The simulation resultsreveal that the developed semiactive fuzzy controller hasbetter performance than traditional passive and optimal con-troller in simultaneously reducing the base displacement and
floor acceleration under near-fault earthquakes for differentground sites
Conflict of Interests
The authors declare no conflict of interests regarding thepublication of this paper
16 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation case
Passive
GHFLC Optimal
J 3 J 5Figure 18 Comparisons on the performance indexes J
3and J5for different control cases (120575 = 4)
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 19 Comparisons on the performance indexes J3and J5for different control cases (120575 = 6)
Acknowledgments
This research was supported by National Natural ScienceFoundation of China under Grant no 51308487 no 41402261and no 51408526 Hebei Provincial Natural Science Founda-tion ofChina underGrant no E2014203055 and the ExcellentYouth Foundation of Hebei Educational Committee underGrant no YQ2013015 The support for this research is greatlyappreciated
References
[1] C Alhan and H Gavin ldquoA parametric study of linear and non-linear passively damped seismic isolation systems for buildingsrdquoEngineering Structures vol 26 no 4 pp 485ndash497 2004
[2] R S Jangid and J M Kelly ldquoBase isolation for near-faultmotionsrdquoEarthquake Engineering and Structural Dynamics vol30 no 5 pp 691ndash707 2001
[3] J Shen M-H Tsai K-C Chang and G C Lee ldquoPerformanceof a seismically isolated bridge under near-fault earthquake
[4] F Mazza A Vulcano and M Mazza ldquoNonlinear dynamicresponse of RC buildings with different base Isolation systemssubjected to horizontal and vertical components of near-faultground motionsrdquo Open Construction and Building TechnologyJournal vol 6 pp 373ndash383 2012
[5] F Mazza and A Vulcano ldquoEffects of near-fault ground motionson the nonlinear dynamic response of base-isolated rc framedbuildingsrdquo Earthquake Engineering and Structural Dynamicsvol 41 no 2 pp 211ndash232 2012
[6] O E Ozbulut and S Hurlebaus ldquoFuzzy control of piezoelectricfriction dampers for seismic protection of smart base isolatedbuildingsrdquo Bulletin of Earthquake Engineering vol 8 no 6 pp1435ndash1455 2010
[7] O E Ozbulut M Bitaraf and S Hurlebaus ldquoAdaptive controlof base-isolated structures against near-field earthquakes usingvariable friction dampersrdquo Engineering Structures vol 33 no12 pp 3143ndash3154 2011
[8] J M Kelly ldquoThe role of damping in seismic isolationrdquo Earth-quake Engineering and Structural Dynamics vol 28 no 1 pp3ndash20 1999
[9] F Mazza and A Vulcano ldquoNonlinear response of RC framedbuildings with isolation and supplemental damping at the basesubjected to near-fault earthquakesrdquo Journal of EarthquakeEngineering vol 13 no 5 pp 690ndash715 2009
[10] M Bitaraf and S Hurlebaus ldquoSemi-active adaptive control ofseismically excited 20-story nonlinear buildingrdquo EngineeringStructures vol 56 no 11 pp 2107ndash2118 2013
[11] D Das T K Datta and A Madan ldquoSemiactive fuzzy controlof the seismic response of building frames with MR dampersrdquoEarthquake Engineering and Structural Dynamics vol 41 no 1pp 99ndash118 2012
[12] A-P Wang and C-D Lee ldquoFuzzy sliding mode control for abuilding structure based on genetic algorithmsrdquo EarthquakeEngineering and Structural Dynamics vol 31 no 4 pp 881ndash8952002
[13] D G Reigles and M D Symans ldquoSupervisory fuzzy controlof a base-isolated benchmark building utilizing a neuro-fuzzymodel of controllable fluid viscous dampersrdquo Structural Controland Health Monitoring vol 13 no 2-3 pp 724ndash747 2006
[14] H-S Kim and P N Roschke ldquoGA-fuzzy control of smartbase isolated benchmark building using supervisory controltechniquerdquo Advances in Engineering Software vol 38 no 7 pp453ndash465 2007
[15] D Yang and Y Zhao ldquoEffects of rupture forward directivity andfling step of near-fault groundmotions on seismic performanceof base-isolated building structurerdquo Acta Seismologica Sinicavol 32 no 5 pp 579ndash587 2010
[16] Y E-A Mohamedzein J A Abdalla and A Abdelwahab ldquoSiteresponse and earthquake design spectra for central KhartoumSudanrdquoBulletin of Earthquake Engineering vol 4 no 3 pp 277ndash293 2006
[17] D Zhao and H Li ldquoShaking table tests and analyses of semi-active fuzzy control for structural seismic reduction with apiezoelectric variable-friction damperrdquo Smart Materials andStructures vol 19 no 10 Article ID 105031 2010
[18] W L He A K Agrawal and J N Yang ldquoNovel semiactivefriction controller for linear structures against earthquakesrdquoJournal of Structural Engineering vol 129 no 7 pp 941ndash9502003
[19] J N Yang and A K Agrawal ldquoSemi-active hybrid controlsystems for nonlinear buildings against near-field earthquakesrdquoEngineering Structures vol 24 no 3 pp 271ndash280 2002
[20] O E Ozbulut and S Hurlebaus ldquoOptimal design of supere-lastic-friction base isolators for seismic protection of highwaybridges against near-field earthquakesrdquo Earthquake Engineeringand Structural Dynamics vol 40 no 3 pp 273ndash291 2011
[21] D A Shook P N Roschke and O E Ozbulut ldquoSuperelasticsemi-active damping of a base-isolated structurerdquo StructuralControl and HealthMonitoring vol 15 no 5 pp 746ndash768 2008
[22] K D PhamG JinM K Sain B F Spencer Jr and S R LibertyldquoGeneralized linear quadratic Gaussian techniques for the windbenchmark problemrdquo Journal of Engineering Mechanics vol130 no 4 pp 466ndash470 2004
[23] S Nagarajaiah and S Narasimhan ldquoSmart base-isolated bench-mark building Part II Phase I sample controllers for linearisolation systemsrdquo Structural Control and Health Monitoringvol 13 no 2-3 pp 605ndash625 2006
Figure 1 Design spectrum envelope for Chi-Chi earthquake
Das et al [11] studied fuzzy control for seismic protectionof civil engineering structures using MR dampers Wangand Lee [12] used genetic algorithm to optimize fuzzy ruleto improve the performance of fuzzy control method Todeal with near-fault and far-field earthquake excitationsReigles and Symans [13] proposed a supervisory fuzzy con-troller to regulate two lower-level fuzzy controllers Kim andRoschke [14] proposed GA-fuzzy control method for smartbase-isolated benchmark building using supervisory controlmethod
In this study an improved fuzzy control is proposedfor seismic protection of base-isolated building with piezo-electric friction damper subjected to near-fault earthquakesof different ground sites According to the elastic designspectrum of the Eurocode 8 recommendation a 5 dampingratio elastic design spectrum for Chi-Chi earthquake is pro-posed to generate artificial earthquakes for different groundsites The proposed fuzzy controller employs a hierarchicfuzzy control algorithm which includes a supervisory fuzzycontroller and a sublevel fuzzy controller to alter its inputnormalization factors according to the current level of groundmotions The sublevel fuzzy control is to determine thecommand voltage of piezoelectric friction damper accordingto the velocity and displacement of the base isolation In orderto simultaneously reduce the base displacement and super-structure responses of the base-isolated structure geneticalgorithm is employed to optimize the supervisory fuzzycontrol and preload of piezoelectric friction damper Forcomparison the proposed fuzzy controller is also investigatedwith passive and linear quadratic Gauss optimal controllerA series of time history analyses of a base-isolated structureunder seismic excitations are also conducted to evaluate theperformance of the developed controller
21 Elastic Design Spectrum for Chi-Chi Earthquake In orderto investigate the distinctive characteristics of near-fault
earthquakes some researchers have evaluated the perfor-mance of the near-fault earthquakes and proposed severaljudgment criterions Yang and Zhao [15] proposed a judg-ment for near-fault earthquakes The principles are listedas follows Firstly the ratio between PGV (Peak GroundVelocity) and PGA (Peak Ground Acceleration) is greaterthan 02 s Secondly the Joyner-Boore distance is between 0and 15 Km Thirdly the earthquake should possess obviouspulses with peak velocity Based on the above principles 29seismicwaves for Chi-Chi earthquake under different groundsites are selected from PEER database to generate elasticdesign spectrum In the late 1980s the European Committeefor Standardization released the first European code whichcontained structure design rules andminimum standards forearthquake resistant design With constant renovation forrecent years Eurocode 8 code includes detailed investigationand research on seismic design parameters of differentregions So this code has become the most authoritativeand influential standard in the world [16] According to theelastic design spectrum that Eurocode 8 code recommendsa 5 damping ratio elastic design spectrum for Chi-Chiearthquakes is proposed to generate artificial earthquakes fordifferent ground sites
The acceleration response spectral 119878119886(119879) as shown in
Figure 1 can be given as follows
119878119886(119879) = 119886
119892sdot 119878 sdot [1 +
119879
119879119861
(25 minus 1)] 0 le 119879 le 119879119861
119878119886(119879) = 119886
119892sdot 119878 sdot 25 119879
119861le 119879 le 119879
119862
119878119886(119879) = 119886
119892sdot 119878 sdot 25 sdot (
119879119862
119879)
120572
119879119862le 119879 le 119879
119863
119878119886(119879) = 119886
119892sdot 119878 sdot 25 sdot (
119879119862
119879)
120572
(119879119863
119879)
120573
119879119863le 119879
(1)
where 119886119892is the design PGA of Chi-Chi earthquake 119878 is the
amplification coefficient for different site conditions the cor-ner periods 119879
119861 119879119862 and 119879
119863represent constant acceleration
constant velocity and constant displacement spectral regionand 120572 and 120573 are dimensionless indexes respectively
As shown in Table 1 the selected seismic records areclassified into three categories which are hard medium andsoft soil site respectively The lower and upper limits foreach parameter of different site are listed in Table 2 Duringthe establishment of the design elastic spectrum the PGAis adjusted to 03 g The elastic design spectrum is obtainedby fitting the average response spectrum curve According tothese considerations the design response spectrum for Chi-Chi earthquake is shown in Figure 2 It can be seen from
the figures that the proposed design spectra are conservativecompared to the average spectrum Owing to the longduration pulses the corner periods are larger than that theEurocode 8 recommends
22 Artificial Earthquakes for Different Ground Sites Basedon the above discussions three artificial earthquakes thatare characterized by Chi-Chi near-fault earthquakes underdifferent ground sites are generated by power spectral densityfunction as shown in Figure 3 The artificial earthquakes arecalculated with a time step of 001 s and the PGA is equalto 03 g Artificial earthquakes for hard medium and softsoil site are shown in Figures 4ndash6 respectively From thesefigures it can be observed that the velocity time histories ofthe generated artificial earthquakes possess obvious pulseswith peak velocities Owing to the similar design spectrumthe time histories of the generated artificial for hard site andmedium site are the same despite several nuances However
4 Mathematical Problems in Engineering
0 2 4 6 8 1000
02
04
06
08
10Sp
ectr
al ac
cele
ratio
n (g
)
Period (s)
Design acceleration spectrumMean spectrum
(a) Hard soil site
0 2 4 6 8 1000
02
04
06
08
10
Spec
tral
acce
lera
tion
(g)
Period (s)
Design acceleration spectrumMean spectrum
(b) Medium soil site
0 2 4 6 8 1000
02
04
06
08
10
Spec
tral
acce
lera
tion
(g)
Period (s)
Design acceleration spectrumMean spectrum
(c) Soft soil site
Figure 2 Design spectrum envelopes for Chi-Chi earthquake
Time
d
I(t)
atb tdtc
b c
I(t) = (ttb)2
I(t) = e03(tc minus t)
Figure 3 Envelop for artificial earthquake
Mathematical Problems in Engineering 5
0 2 4 6 8 10 12 14 16 18 20
minus03
minus02
minus01
00
01
02
03
Acce
lera
tion
(g)
Time (s)
(a) Time history of acceleration
0 2 4 6 8 10 12 14 16 18 20
minus09
minus06
minus03
00
03
06
09
Velo
city
(ms
)
Time (s)
(b) Time history of velocity
Figure 4 Artificial earthquakes for hard soil site
0 2 4 6 8 10 12 14 16 18 20
minus03
minus02
minus01
00
01
02
03
Acce
lera
tion
(g)
Time (s)
(a) Time history of acceleration
0 2 4 6 8 10 12 14 16 18 20
minus09
minus06
minus03
00
03
06
09Ve
loci
ty (m
s)
Time (s)
(b) Time history of velocity
Figure 5 Artificial earthquake for medium soil site
0 2 4 6 8 10 12 14 16 18 20
minus03
minus02
minus01
00
01
02
03
Acce
lera
tion
(g)
Time (s)
(a) Time history of acceleration
0 2 4 6 8 10 12 14 16 18 20
minus09
minus06
minus03
00
03
06
09
Velo
city
(ms
)
Time (s)
(b) Time history of velocity
Figure 6 Artificial earthquake for soft soil site
6 Mathematical Problems in Engineering
the time history of the generated artificial earthquakes for softsoil is distinct with the other Particularly the peak velocityreaches 09ms which is significantly greater than the other
3 Model of Base-Isolated Structure andPiezoelectric Friction Damper
31 Equation of Motion for Base-Isolated Structure Consideran n-degree of freedom base-isolated structure with a piezo-electric friction damper at the isolation floor the dynamicequation of the base-isolated system is given by
where M C and K represent 119899 times 119899 mass damping andstiffness matrices respectively X(119905) X(119905) and X(119905) are theacceleration velocity and displacement vectors respectivelyU(119905) is the control force generated by the piezoelectric frictiondamper and
119892(119905) is the earthquake acceleration
Rewriting (2) in state-space form gives
Z (119905) = AZ (119905) + BU (119905) + E119892(119905) (3)
where
Z (119905) = [X (119905)X (119905)
]
E = [0119899times1
Mminus1E119904
]
B = [0119899times1
Mminus1B119904
]
A = [0119899times119899
I119899times119899
minusMminus1K minusMminus1C]
(4)
32 Model of Piezoelectric Friction Damper Piezoelectricfriction damper is a novel semiactive control device whichutilizes piezoelectric stacks to regulate the damping forceto provide a satisfying level of friction force Recently theauthors also proposed a piezoelectric friction damper andinvestigated their performances theoretically and experimen-tally [17]
During the movement of the base-isolated structure afriction damper has two possible motion states sticking andslipping phases [18 19] The friction force of the piezoelectricfriction damper is given as [20]
minus120583119873 (119905) le 119891 (119905) le 120583119873 (119905) = 0
(5)
where 119873(119905) is the total contact force 119873pre represents thepreload of the piezoelectric friction damper 119862pz is thepiezoelectric coefficient of the piezoelectric actuator 119881(119905)is the input voltage of piezoelectric stack actuator 120583 is the
Table 3 Parameters of piezoelectric friction damper
friction coefficient of the damper sgn(sdot) represents the signfunction related to the slip rate of the damper and 119891(119905)denotes damping force of piezoelectric friction damper
However the static state of the piezoelectric frictiondamper is complex to be estimated Shook et al [21] proposedan approximate calculation formula for the sticking frictionforce as given in the following
119891119904= minus120583119873 (119905) sgn ()
when 119891119904=1003816100381610038161003816119891119894 + 119891119903
where 119891119894is the inertial force applied on the mass 119891
119903is the
restoring force provided by the isolation bearing 119898119894is the
mass of the superstructure 119898119887and 119896
119887are the mass and
stiffness of base isolator and 119909119887is the displacement of base
isolatorThe parameters of piezoelectric friction damper are listed
in Table 3 And the preload of the piezoelectric frictiondamper can be optimized by genetic algorithm
4 GA-Based Hierarchic Fuzzy ControlAlgorithm
41 Framework of the Developed Fuzzy Logic Controller Thecontroller adopts a hierarchic fuzzy control algorithm inwhich a supervisory fuzzy controller governs a sublevelfuzzy controller by altering its input normalization factorsaccording to the current level of groundmotionThe sublevelfuzzy logic controller is designed to determine the commandvoltage of piezoelectric friction damper according to thevelocity and displacement of base isolation Piezoelectricfriction damper regulates the damping force according tothe input voltage Genetic algorithm is employed to optimizesupervisory fuzzy controller and preload of piezoelectricfriction damper according to an objective function and thegenerated artificial earthquakes for different ground sitesTheblock diagram of the system for the developed controller isshown in Figure 7
42 Sublevel Fuzzy Controller The sublevel fuzzy controlleris established in order to determine the command voltage ofthe piezoelectric friction damper The isolation displacementand velocity are selected as two input variables and commandvoltage is employed as a single output variable as shown inFigure 8The definitions of themembership function of input
Mathematical Problems in Engineering 7
Ground motion
Damping force
Semiactiveisolated
structure
Piezoelectricfriction damper
Ground velocity
Optimize
Voltage
Structural response
Isolation velocity and displacement
Sublevel fuzzycontroller
Supervisoryfuzzy controller
Optimize
Genetic algorithm
Nd
N
Figure 7 Block diagram of the base-isolated system for the fuzzy controller
minus10 minus05 00 05 100
1PL
PMPSZENSNM
Deg
ree o
f mem
bers
hip
Normalized displacement
NL
00 05 100
1PL
PMPSZENSNM
Deg
ree o
f mem
bers
hip
Normalized velocity
NL
0 200 400 600 800 10000
1VL
LMS
Deg
ree o
f mem
bers
hip
Voltage (V)
ZE
minus10 minus05
Figure 8 Input and output membership functions of sublevel fuzzy control
variables are as follows NL negative large NM negativemedium NS negative small ZE zero PS positive small PMpositive medium and PL positive large The definition ofthe membership function of output variable is as follows ZEzero S small M medium L large and VL very large Themembership functions are employed Gaussian type for inputand output variables The fuzzy control rules are defined inTable 4
In the establishment of fuzzy control rules it followsthe following principles if the isolation displacement andvelocity are in opposite sign then the output voltage becomessmall in order to ensure output small damping force inthe piezoelectric friction damper Contrarily if the isolationdisplacement and velocity have the same sign the outputvoltage becomes large Certainly when the displacement andvelocity are almost zero or small the command voltage is
8 Mathematical Problems in Engineering
Table 4 Fuzzy control rules adopted for sublevel fuzzy control
Velocity ofisolated floor
Displacement of isolated floorNL NM NS ZE PS PM PL
NL VL VL L L M S ZENM VL L L M S ZE SNS L L M S ZE S MZE L M S ZE S M LPS M S ZE S M L LPM S ZE S M L L VLPL ZE S M L L VL VL
minus1minus05
005
1
minus1minus05
005
1
500
1000
VelocityDisplacement
Volta
ge (V
)
Figure 9 Fuzzy control surface for sublevel fuzzy controller
about zero this means that piezoelectric friction damper actsas a passive friction damper The defuzzification of fuzzycontrol adopts the method of centroid to get a crisp outputvalue The control surface and color-filled contour line ofsublevel fuzzy control are depicted in Figure 9
43 Supervisory Fuzzy Logic Controller In the fuzzy logiccontrol normalization factors need to satisfy a certain objec-tive The oversize normalization factors can enlarge the basedisplacement effectively Contrarily too small normalizationfactors can result in large control force that amplifies theaccelerations of base-isolated structure Thus a supervisoryfuzzy logic control is proposed to adjust its normalizationfactors in real-time As discussed earlier near-fault earth-quakes usually have long duration pulses with peak velocitiesThus the supervisory fuzzy control employs ground velocityas single input variable to identify the characteristics ofthe ground motion The normalization factors of sublevelfuzzy control are selected as two output variables HereGaussian membership functions are used for input andoutput variables as shown in
120583gauss = exp[minus(119909 minus 119888)2
21205902] (7)
where 119888 and 120590 are the constant values that define the shape ofthe Gauss functions respectively
The rules of the supervisory fuzzy controller are definedby the following form
Rule119894 IF 119883 is 119860119894 then 1198841is 1198621198941 1198842is 1198621198942
119894 = 1 2 119872
(8)
where119872 is the number of fuzzy control rules 119883 is the inputvariable 119884
1and 119884
2are the output variables 119860119894 119862119894
1 and 119862119894
2
are the linguistic values characterized by input and outputmembership functions respectively One fuzzy control ruleis described by three Gaussian membership functions andeach membership function can be defined by two parameters(119888 and 120590) Therefore a total of five fuzzy control rules canbe optimized by encoding these two parameters into thegene using genetic algorithm Consequently a total of 30parameters are encoded into the chromosome to define theinference system of supervisory fuzzy controller as shown inFigure 10
Similar to normalization factors the preload of thepiezoelectric friction dampers has a great influence on thedamping effect Thus it is essential to establish an effectivesupervisory fuzzy logic controller and a suitable preloadof piezoelectric friction damper Generally for the seismicprotection of a base-isolated structure there is a trade-off between the isolation displacement and superstructureacceleration The main control objective is to depress theisolation displacementwithout excessively increasing acceler-ation response of the superstructure In this section a geneticalgorithm is employed to seek out an optimal solution forthe control of the base-isolated structure The flow chart ofgenetic algorithm is shown in Figure 11
Genetic algorithm is a computational model for thesimulation of Darwin natural genetic selection and biologicalevolution Different from the traditional search algorithmgenetic algorithm begins to search a group of optimal solu-tions from an initial random population by mutation andrecombination Each individual which consists of a set ofbinary strings is a solution to the objective problem Afterinitialization genetic algorithm uses a sort method to rankindividuals It compares each solution with other solutionsin the population to find whether it is dominated Duringthe process of creating a new generation it selects a suitableindividual according to the size of the fitness value Afterseveral generations the individual value gradually convergesto the best chromosome which is the optimal solution
The objective fitness function employed in this study isshown as follows
119869 = 06 times119910119887max
119910119887max
+ 04 timesradicsum119899
119894=1(119886119894max119886119894max)
2
119899 (9)
where 119910119887max and 119910119887max denote the peak base displacements
for the fuzzy control and uncontrolled cases respectively119886119894max and 119886119894max represent the peak superstructure accelera-tion for the fuzzy control and uncontrolled case respectively
The objective of genetic algorithm is tomake the objectivefitness function reach its minimum value by selecting oneset of parameters of supervisory fuzzy control and preload
Figure 10 Encoding structure for genetic algorithm
of piezoelectric friction damper The initial population sizegenetic algebra and crossover probability are set to 20 50and 08 respectively Through inputting the artificial earth-quakes which are characterized by near-fault earthquakesfor different ground sites the supervisory fuzzy control andpreload of piezoelectric friction dampers can be optimizedThe fuzzy control surfaces of optimized supervisory fuzzycontrol are shown in Figure 12
5 Linear Quadratic Gaussian Controller
LQG (Linear Quadratic Gaussian) method is based onKalman filter technique which has become a widely usedcontrol algorithm For comparison purpose LQG is adoptedto regulate the contact normal force of piezoelectric frictiondamper in the study The optimal controller takes groundacceleration as white noise and considers the velocity anddisplacement of base isolation as feedback signals Thecontrol performance index is defined as follows [22]
119869 = lim120591rarr+infin
1
120591
sdot 119864 int
120591
0
[Z (119905)119879QZ (119905) + U (119905)119879RU (119905)] 119889 (119905) (10)
where Q2119899times2119899
and R1times1
are semi-positive definite matrix andpositive definite matrix respectivelyThe control force can beobtained as follows
U (119905) = minusGZ (119905) (11)
G = Rminus1B119879P (12)
where P can be computed by the solution of the Riccatiequation as follows
minusPA minus A119879P + PBRminus1B119879P minusQ = 0 (13)
The control force obtained from the above equation isactive control force which could not be always achieved bypiezoelectric friction damper It is realized that the directionof active control force is opposite to the slipping direction ofpiezoelectric friction damper Therefore the desired controlforce119906
119889(119905) can be achieved according to the following criteria
Whether or not to meet thecondition of convergence
Figure 11 Flow chart of genetic algorithm
where 119906active is the control force obtained from LQG con-troller
119887is the velocity of base isolator119891max and119891min are the
maximum and minimum friction forces of the piezoelectricfriction damper respectively
6 Numerical Simulations
61 Model of the Base-Isolated Structure A five-story base-isolated building which is proposed by He et al is employedto evaluate the performance of developed fuzzy controllers[18] The fundamental period of the five-story building is03 s For the given isolation parameters the fundamentalperiod of the base-isolated building becomes 25 sThereforean isolation ratio 120575 equal to 83 (=2503) is obtainedThe model of the base-isolated structure with piezoelectricfriction damper is shown in Figure 13 The parameters of thebase-isolated structure are shown in Table 5
62 Performance Evaluation Index In order to evaluate theperformance of base-isolated structure for different controlalgorithms a total of nine performance indexes are employedin this study [23] as shown in Table 6
The performance indexes J1through J
5denote the struc-
ture responses for the controlled building normalized byuncontrolled structure respectively The performance indexJ6evaluates the peak control force normalized by the peak
base shear for controlled structure The performance indexesJ7and J8represent RMS (Root Mean Square) base displace-
ments and RMS floor accelerations respectively J9computes
the energy dissipated by friction dampers normalized by theearthquake input energy to the controlled structure
63 Simulation Results and Analysis A total of nine seis-mic excitations that contain six real ground motions andthree artificial earthquakes are selected to evaluate the per-formance of the optimized fuzzy logic controller In thisstudy the time histories of strong earthquake which rangefrom 20 s to 70 s are selected for numerical simulation andanalysis
The numerical results for various earthquakes are listedin Table 7 In the table the Genetic Algorithm HierarchicFuzzy Logic Control is named as GHFLC Moreover forcomparison purpose the results for an optimal controller andpassive operation of friction damper are also listed in thetable Numbers in bold font indicate the best results amongall control cases
Base displacement is an important index to evaluatethe effectiveness for different controllers For a base-isolatedstructure the reduction of base displacement is a primarypurpose to prevent permanent damage for isolation bearingsor adjacent buildings Although passive operation of frictiondampers can successfully reduce the performance indexassociated with the peak and RMS base displacements (J
3and
J7) it causes significant amplification in peak and RMS floor
accelerations (J5and J
8) for most cases due to the passive
control For example as compared to the uncontrolledstructure for TCU052 TCU053 and TCU054 earthquakespassive control leads to 6 45 and 42 amplification inpeak floor acceleration respectively However the proposedfuzzy controller can successfully improve the base-isolatedstructure acceleration at the cost of slight deterioration in theperformance indices J
3and J7on comparison with passive
control For example for TCU052 TCU053 and TCU054earthquakes GHFLC results in 15 13 and 16 decrease inpeak floor accelerations respectively As compared to passivecontrol there are 9 3 and 7 increase in peak basedisplacements
The time histories of friction force and force-displacement curves of friction dampers for differentcontrollers subjected to TCU052 earthquake are shown inFigure 14 From the figures it can be seen that the passivecontrol outputs lager damper force than GHFLC Becausethe supervisory fuzzy control can alter input normalizationfactors of sublevel FLC according to the current level ofground motion there are some serrations presented at theedge of the hysteretic curve of piezoelectric friction damper
The comparison of the performance indexes J3 J7 J5and
J8under different control cases is shown in Figures 15 and
16 respectively From these figures it can be seen that thefuzzy controller is more effective than passive and optimal
Mathematical Problems in Engineering 11O
utpu
t
009
055
026
000033
000094000
Input ground velocity (ms)
Nd
N
(a) Hard soilO
utpu
t
Input ground velocity (ms)
071
042
000
008000
037
103000
Nd
N
(b) Medium soil
Out
put
Input ground velocity (ms)
107
053
000045
011000
117000
Nd
N
(c) Soft soil
Figure 12 Control surface for optimized supervisory fuzzy control
PFD
Fixed reference
LRB
Figure 13 Model of the base-isolated structure
12 Mathematical Problems in Engineering
Table 6 Performance index
Peak base shear Peak interstory drift RMS base displacement
controller in simultaneously depressing the superstructureacceleration and base displacement For example the appli-cation of developed fuzzy controller leads to an average of112 decrease in peak floor acceleration and an average ofonly 36 increase in peak base displacement as compared topassive control Particularly optimal controller produces anaverage of only 41 reduction in peak floor acceleration and
leads to 79 increase in peak base displacement as comparedto passive control Therefore the improved fuzzy controlmethod shows better performance than passive and optimalcontrol
In order to further evaluate the performance of differentcontrollers the energy time histories for different controllersare compared with each other For a base-isolated structure
Mathematical Problems in Engineering 13
20 30 40 50 60 70minus20
minus10
00
10
20Fr
ictio
n fo
rce (
kN)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(a) Passive control
20 30 40 50 60 70minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(b) GHFLC method
Figure 14 Time histories of friction force and force-displacement diagram against TCU052 earthquake
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation case
Passive OptimalGHFLC
1 2 3 4 5 6 7 8 903
04
05
06
07
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 15 Comparisons on the performance indexes J3and J7for different control cases
14 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
Excitation case
Passive
GHFLC Optimal
J 8J 5
Figure 16 Comparison of the performance indexes J5and J8for different control cases
with piezoelectric friction dampers installed on the isolationthe energy equations are defined as follows
where 119864119870 119864120585 119864119878 119864119867 and 119864
119868denote the absolute kinetic
energy damping energy elastic strain energy energy dis-sipated by piezoelectric friction dampers and total inputenergy respectively The energy time histories for differentcontrollers against TCU052Chi-Chi earthquake are shown inFigure 17 It can be seen from the figures that the piezoelectricfriction dampers dissipate most of the input energy fordifferent control cases subjected to TCU052 earthquake
In order to compare different effects under near-faultground motions recorded for different sites the average ofinput energy and structure responses subjected to near-faultearthquakes are given in Table 8
As shown in Table 8 the near-fault earthquakes forsoft sites are more destructive than hard sites For instancecompared to hard sites the input energy and the base dis-placement of RMS of the base-isolated structure for soft soil
increase by 143 and 256 respectively However GHFLCpossesses favorable performance under different ground sitesand the damping effect has no distinctly direct relationshipwith site category
As discussed in Section 61 the isolation ratio of thesimulation model equals 83 In order to evaluate the effectsof isolation ratio on the damping performance of GHFLC thestiffness value of isolation is adjusted to 1045 and 452 kNmrespectively Then the numerical results for different valuesof isolation ratio (120575 = 4 6) are obtained The performanceindexes J
3and J5for different isolation ratios are shown in
Figures 18 and 19 respectivelyFor base-isolated structure isolation ratio has a signifi-
cant influence on the isolation effect A larger isolation ratiowhich means a minor stiffness value of isolation usuallyleads to conspicuous enlargement of base displacement anddecrease of superstructural responses due to the increaseof fundamental vibration period and vice versa Howeveras shown in Figures 18 and 19 the shock absorption rateof GHFLC has little change when isolation ratio variesdifferently and the proposed fuzzy control shows favorableeffectiveness in the diverse isolation ratios of base-isolatedstructures
7 Conclusions
In this study an optimized fuzzy logic control which isdesigned for Chi-Chi near-fault earthquakes under differentground sites is proposed An elastic design spectrum isproposed to generate near-fault earthquakes for differentground sitesThe characteristic of the design spectrum is thatit has larger periods and peak acceleration than conventionalspectrum Genetic algorithm is employed to optimize thesupervisory fuzzy controller and preload of piezoelectric
Mathematical Problems in Engineering 15
Table 8 Average ofinput energy and structure responses subjected to near-fault earthquakes
Site classification Input energy (kNsdotm) Base shear (kN) Base displacement ofRMS (m)
Figure 17 Energy time histories subjected to Chi-Chi TCU052 earthquake
friction dampers according to three artificial earthquakesthat are characterized by Chi-Chi earthquakes Passive andoptimal controllers are also compared with the performanceof the developed fuzzy controller The simulation resultsreveal that the developed semiactive fuzzy controller hasbetter performance than traditional passive and optimal con-troller in simultaneously reducing the base displacement and
floor acceleration under near-fault earthquakes for differentground sites
Conflict of Interests
The authors declare no conflict of interests regarding thepublication of this paper
16 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation case
Passive
GHFLC Optimal
J 3 J 5Figure 18 Comparisons on the performance indexes J
3and J5for different control cases (120575 = 4)
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 19 Comparisons on the performance indexes J3and J5for different control cases (120575 = 6)
Acknowledgments
This research was supported by National Natural ScienceFoundation of China under Grant no 51308487 no 41402261and no 51408526 Hebei Provincial Natural Science Founda-tion ofChina underGrant no E2014203055 and the ExcellentYouth Foundation of Hebei Educational Committee underGrant no YQ2013015 The support for this research is greatlyappreciated
References
[1] C Alhan and H Gavin ldquoA parametric study of linear and non-linear passively damped seismic isolation systems for buildingsrdquoEngineering Structures vol 26 no 4 pp 485ndash497 2004
[2] R S Jangid and J M Kelly ldquoBase isolation for near-faultmotionsrdquoEarthquake Engineering and Structural Dynamics vol30 no 5 pp 691ndash707 2001
[3] J Shen M-H Tsai K-C Chang and G C Lee ldquoPerformanceof a seismically isolated bridge under near-fault earthquake
[4] F Mazza A Vulcano and M Mazza ldquoNonlinear dynamicresponse of RC buildings with different base Isolation systemssubjected to horizontal and vertical components of near-faultground motionsrdquo Open Construction and Building TechnologyJournal vol 6 pp 373ndash383 2012
[5] F Mazza and A Vulcano ldquoEffects of near-fault ground motionson the nonlinear dynamic response of base-isolated rc framedbuildingsrdquo Earthquake Engineering and Structural Dynamicsvol 41 no 2 pp 211ndash232 2012
[6] O E Ozbulut and S Hurlebaus ldquoFuzzy control of piezoelectricfriction dampers for seismic protection of smart base isolatedbuildingsrdquo Bulletin of Earthquake Engineering vol 8 no 6 pp1435ndash1455 2010
[7] O E Ozbulut M Bitaraf and S Hurlebaus ldquoAdaptive controlof base-isolated structures against near-field earthquakes usingvariable friction dampersrdquo Engineering Structures vol 33 no12 pp 3143ndash3154 2011
[8] J M Kelly ldquoThe role of damping in seismic isolationrdquo Earth-quake Engineering and Structural Dynamics vol 28 no 1 pp3ndash20 1999
[9] F Mazza and A Vulcano ldquoNonlinear response of RC framedbuildings with isolation and supplemental damping at the basesubjected to near-fault earthquakesrdquo Journal of EarthquakeEngineering vol 13 no 5 pp 690ndash715 2009
[10] M Bitaraf and S Hurlebaus ldquoSemi-active adaptive control ofseismically excited 20-story nonlinear buildingrdquo EngineeringStructures vol 56 no 11 pp 2107ndash2118 2013
[11] D Das T K Datta and A Madan ldquoSemiactive fuzzy controlof the seismic response of building frames with MR dampersrdquoEarthquake Engineering and Structural Dynamics vol 41 no 1pp 99ndash118 2012
[12] A-P Wang and C-D Lee ldquoFuzzy sliding mode control for abuilding structure based on genetic algorithmsrdquo EarthquakeEngineering and Structural Dynamics vol 31 no 4 pp 881ndash8952002
[13] D G Reigles and M D Symans ldquoSupervisory fuzzy controlof a base-isolated benchmark building utilizing a neuro-fuzzymodel of controllable fluid viscous dampersrdquo Structural Controland Health Monitoring vol 13 no 2-3 pp 724ndash747 2006
[14] H-S Kim and P N Roschke ldquoGA-fuzzy control of smartbase isolated benchmark building using supervisory controltechniquerdquo Advances in Engineering Software vol 38 no 7 pp453ndash465 2007
[15] D Yang and Y Zhao ldquoEffects of rupture forward directivity andfling step of near-fault groundmotions on seismic performanceof base-isolated building structurerdquo Acta Seismologica Sinicavol 32 no 5 pp 579ndash587 2010
[16] Y E-A Mohamedzein J A Abdalla and A Abdelwahab ldquoSiteresponse and earthquake design spectra for central KhartoumSudanrdquoBulletin of Earthquake Engineering vol 4 no 3 pp 277ndash293 2006
[17] D Zhao and H Li ldquoShaking table tests and analyses of semi-active fuzzy control for structural seismic reduction with apiezoelectric variable-friction damperrdquo Smart Materials andStructures vol 19 no 10 Article ID 105031 2010
[18] W L He A K Agrawal and J N Yang ldquoNovel semiactivefriction controller for linear structures against earthquakesrdquoJournal of Structural Engineering vol 129 no 7 pp 941ndash9502003
[19] J N Yang and A K Agrawal ldquoSemi-active hybrid controlsystems for nonlinear buildings against near-field earthquakesrdquoEngineering Structures vol 24 no 3 pp 271ndash280 2002
[20] O E Ozbulut and S Hurlebaus ldquoOptimal design of supere-lastic-friction base isolators for seismic protection of highwaybridges against near-field earthquakesrdquo Earthquake Engineeringand Structural Dynamics vol 40 no 3 pp 273ndash291 2011
[21] D A Shook P N Roschke and O E Ozbulut ldquoSuperelasticsemi-active damping of a base-isolated structurerdquo StructuralControl and HealthMonitoring vol 15 no 5 pp 746ndash768 2008
[22] K D PhamG JinM K Sain B F Spencer Jr and S R LibertyldquoGeneralized linear quadratic Gaussian techniques for the windbenchmark problemrdquo Journal of Engineering Mechanics vol130 no 4 pp 466ndash470 2004
[23] S Nagarajaiah and S Narasimhan ldquoSmart base-isolated bench-mark building Part II Phase I sample controllers for linearisolation systemsrdquo Structural Control and Health Monitoringvol 13 no 2-3 pp 605ndash625 2006
As shown in Table 1 the selected seismic records areclassified into three categories which are hard medium andsoft soil site respectively The lower and upper limits foreach parameter of different site are listed in Table 2 Duringthe establishment of the design elastic spectrum the PGAis adjusted to 03 g The elastic design spectrum is obtainedby fitting the average response spectrum curve According tothese considerations the design response spectrum for Chi-Chi earthquake is shown in Figure 2 It can be seen from
the figures that the proposed design spectra are conservativecompared to the average spectrum Owing to the longduration pulses the corner periods are larger than that theEurocode 8 recommends
22 Artificial Earthquakes for Different Ground Sites Basedon the above discussions three artificial earthquakes thatare characterized by Chi-Chi near-fault earthquakes underdifferent ground sites are generated by power spectral densityfunction as shown in Figure 3 The artificial earthquakes arecalculated with a time step of 001 s and the PGA is equalto 03 g Artificial earthquakes for hard medium and softsoil site are shown in Figures 4ndash6 respectively From thesefigures it can be observed that the velocity time histories ofthe generated artificial earthquakes possess obvious pulseswith peak velocities Owing to the similar design spectrumthe time histories of the generated artificial for hard site andmedium site are the same despite several nuances However
4 Mathematical Problems in Engineering
0 2 4 6 8 1000
02
04
06
08
10Sp
ectr
al ac
cele
ratio
n (g
)
Period (s)
Design acceleration spectrumMean spectrum
(a) Hard soil site
0 2 4 6 8 1000
02
04
06
08
10
Spec
tral
acce
lera
tion
(g)
Period (s)
Design acceleration spectrumMean spectrum
(b) Medium soil site
0 2 4 6 8 1000
02
04
06
08
10
Spec
tral
acce
lera
tion
(g)
Period (s)
Design acceleration spectrumMean spectrum
(c) Soft soil site
Figure 2 Design spectrum envelopes for Chi-Chi earthquake
Time
d
I(t)
atb tdtc
b c
I(t) = (ttb)2
I(t) = e03(tc minus t)
Figure 3 Envelop for artificial earthquake
Mathematical Problems in Engineering 5
0 2 4 6 8 10 12 14 16 18 20
minus03
minus02
minus01
00
01
02
03
Acce
lera
tion
(g)
Time (s)
(a) Time history of acceleration
0 2 4 6 8 10 12 14 16 18 20
minus09
minus06
minus03
00
03
06
09
Velo
city
(ms
)
Time (s)
(b) Time history of velocity
Figure 4 Artificial earthquakes for hard soil site
0 2 4 6 8 10 12 14 16 18 20
minus03
minus02
minus01
00
01
02
03
Acce
lera
tion
(g)
Time (s)
(a) Time history of acceleration
0 2 4 6 8 10 12 14 16 18 20
minus09
minus06
minus03
00
03
06
09Ve
loci
ty (m
s)
Time (s)
(b) Time history of velocity
Figure 5 Artificial earthquake for medium soil site
0 2 4 6 8 10 12 14 16 18 20
minus03
minus02
minus01
00
01
02
03
Acce
lera
tion
(g)
Time (s)
(a) Time history of acceleration
0 2 4 6 8 10 12 14 16 18 20
minus09
minus06
minus03
00
03
06
09
Velo
city
(ms
)
Time (s)
(b) Time history of velocity
Figure 6 Artificial earthquake for soft soil site
6 Mathematical Problems in Engineering
the time history of the generated artificial earthquakes for softsoil is distinct with the other Particularly the peak velocityreaches 09ms which is significantly greater than the other
3 Model of Base-Isolated Structure andPiezoelectric Friction Damper
31 Equation of Motion for Base-Isolated Structure Consideran n-degree of freedom base-isolated structure with a piezo-electric friction damper at the isolation floor the dynamicequation of the base-isolated system is given by
where M C and K represent 119899 times 119899 mass damping andstiffness matrices respectively X(119905) X(119905) and X(119905) are theacceleration velocity and displacement vectors respectivelyU(119905) is the control force generated by the piezoelectric frictiondamper and
119892(119905) is the earthquake acceleration
Rewriting (2) in state-space form gives
Z (119905) = AZ (119905) + BU (119905) + E119892(119905) (3)
where
Z (119905) = [X (119905)X (119905)
]
E = [0119899times1
Mminus1E119904
]
B = [0119899times1
Mminus1B119904
]
A = [0119899times119899
I119899times119899
minusMminus1K minusMminus1C]
(4)
32 Model of Piezoelectric Friction Damper Piezoelectricfriction damper is a novel semiactive control device whichutilizes piezoelectric stacks to regulate the damping forceto provide a satisfying level of friction force Recently theauthors also proposed a piezoelectric friction damper andinvestigated their performances theoretically and experimen-tally [17]
During the movement of the base-isolated structure afriction damper has two possible motion states sticking andslipping phases [18 19] The friction force of the piezoelectricfriction damper is given as [20]
minus120583119873 (119905) le 119891 (119905) le 120583119873 (119905) = 0
(5)
where 119873(119905) is the total contact force 119873pre represents thepreload of the piezoelectric friction damper 119862pz is thepiezoelectric coefficient of the piezoelectric actuator 119881(119905)is the input voltage of piezoelectric stack actuator 120583 is the
Table 3 Parameters of piezoelectric friction damper
friction coefficient of the damper sgn(sdot) represents the signfunction related to the slip rate of the damper and 119891(119905)denotes damping force of piezoelectric friction damper
However the static state of the piezoelectric frictiondamper is complex to be estimated Shook et al [21] proposedan approximate calculation formula for the sticking frictionforce as given in the following
119891119904= minus120583119873 (119905) sgn ()
when 119891119904=1003816100381610038161003816119891119894 + 119891119903
where 119891119894is the inertial force applied on the mass 119891
119903is the
restoring force provided by the isolation bearing 119898119894is the
mass of the superstructure 119898119887and 119896
119887are the mass and
stiffness of base isolator and 119909119887is the displacement of base
isolatorThe parameters of piezoelectric friction damper are listed
in Table 3 And the preload of the piezoelectric frictiondamper can be optimized by genetic algorithm
4 GA-Based Hierarchic Fuzzy ControlAlgorithm
41 Framework of the Developed Fuzzy Logic Controller Thecontroller adopts a hierarchic fuzzy control algorithm inwhich a supervisory fuzzy controller governs a sublevelfuzzy controller by altering its input normalization factorsaccording to the current level of groundmotionThe sublevelfuzzy logic controller is designed to determine the commandvoltage of piezoelectric friction damper according to thevelocity and displacement of base isolation Piezoelectricfriction damper regulates the damping force according tothe input voltage Genetic algorithm is employed to optimizesupervisory fuzzy controller and preload of piezoelectricfriction damper according to an objective function and thegenerated artificial earthquakes for different ground sitesTheblock diagram of the system for the developed controller isshown in Figure 7
42 Sublevel Fuzzy Controller The sublevel fuzzy controlleris established in order to determine the command voltage ofthe piezoelectric friction damper The isolation displacementand velocity are selected as two input variables and commandvoltage is employed as a single output variable as shown inFigure 8The definitions of themembership function of input
Mathematical Problems in Engineering 7
Ground motion
Damping force
Semiactiveisolated
structure
Piezoelectricfriction damper
Ground velocity
Optimize
Voltage
Structural response
Isolation velocity and displacement
Sublevel fuzzycontroller
Supervisoryfuzzy controller
Optimize
Genetic algorithm
Nd
N
Figure 7 Block diagram of the base-isolated system for the fuzzy controller
minus10 minus05 00 05 100
1PL
PMPSZENSNM
Deg
ree o
f mem
bers
hip
Normalized displacement
NL
00 05 100
1PL
PMPSZENSNM
Deg
ree o
f mem
bers
hip
Normalized velocity
NL
0 200 400 600 800 10000
1VL
LMS
Deg
ree o
f mem
bers
hip
Voltage (V)
ZE
minus10 minus05
Figure 8 Input and output membership functions of sublevel fuzzy control
variables are as follows NL negative large NM negativemedium NS negative small ZE zero PS positive small PMpositive medium and PL positive large The definition ofthe membership function of output variable is as follows ZEzero S small M medium L large and VL very large Themembership functions are employed Gaussian type for inputand output variables The fuzzy control rules are defined inTable 4
In the establishment of fuzzy control rules it followsthe following principles if the isolation displacement andvelocity are in opposite sign then the output voltage becomessmall in order to ensure output small damping force inthe piezoelectric friction damper Contrarily if the isolationdisplacement and velocity have the same sign the outputvoltage becomes large Certainly when the displacement andvelocity are almost zero or small the command voltage is
8 Mathematical Problems in Engineering
Table 4 Fuzzy control rules adopted for sublevel fuzzy control
Velocity ofisolated floor
Displacement of isolated floorNL NM NS ZE PS PM PL
NL VL VL L L M S ZENM VL L L M S ZE SNS L L M S ZE S MZE L M S ZE S M LPS M S ZE S M L LPM S ZE S M L L VLPL ZE S M L L VL VL
minus1minus05
005
1
minus1minus05
005
1
500
1000
VelocityDisplacement
Volta
ge (V
)
Figure 9 Fuzzy control surface for sublevel fuzzy controller
about zero this means that piezoelectric friction damper actsas a passive friction damper The defuzzification of fuzzycontrol adopts the method of centroid to get a crisp outputvalue The control surface and color-filled contour line ofsublevel fuzzy control are depicted in Figure 9
43 Supervisory Fuzzy Logic Controller In the fuzzy logiccontrol normalization factors need to satisfy a certain objec-tive The oversize normalization factors can enlarge the basedisplacement effectively Contrarily too small normalizationfactors can result in large control force that amplifies theaccelerations of base-isolated structure Thus a supervisoryfuzzy logic control is proposed to adjust its normalizationfactors in real-time As discussed earlier near-fault earth-quakes usually have long duration pulses with peak velocitiesThus the supervisory fuzzy control employs ground velocityas single input variable to identify the characteristics ofthe ground motion The normalization factors of sublevelfuzzy control are selected as two output variables HereGaussian membership functions are used for input andoutput variables as shown in
120583gauss = exp[minus(119909 minus 119888)2
21205902] (7)
where 119888 and 120590 are the constant values that define the shape ofthe Gauss functions respectively
The rules of the supervisory fuzzy controller are definedby the following form
Rule119894 IF 119883 is 119860119894 then 1198841is 1198621198941 1198842is 1198621198942
119894 = 1 2 119872
(8)
where119872 is the number of fuzzy control rules 119883 is the inputvariable 119884
1and 119884
2are the output variables 119860119894 119862119894
1 and 119862119894
2
are the linguistic values characterized by input and outputmembership functions respectively One fuzzy control ruleis described by three Gaussian membership functions andeach membership function can be defined by two parameters(119888 and 120590) Therefore a total of five fuzzy control rules canbe optimized by encoding these two parameters into thegene using genetic algorithm Consequently a total of 30parameters are encoded into the chromosome to define theinference system of supervisory fuzzy controller as shown inFigure 10
Similar to normalization factors the preload of thepiezoelectric friction dampers has a great influence on thedamping effect Thus it is essential to establish an effectivesupervisory fuzzy logic controller and a suitable preloadof piezoelectric friction damper Generally for the seismicprotection of a base-isolated structure there is a trade-off between the isolation displacement and superstructureacceleration The main control objective is to depress theisolation displacementwithout excessively increasing acceler-ation response of the superstructure In this section a geneticalgorithm is employed to seek out an optimal solution forthe control of the base-isolated structure The flow chart ofgenetic algorithm is shown in Figure 11
Genetic algorithm is a computational model for thesimulation of Darwin natural genetic selection and biologicalevolution Different from the traditional search algorithmgenetic algorithm begins to search a group of optimal solu-tions from an initial random population by mutation andrecombination Each individual which consists of a set ofbinary strings is a solution to the objective problem Afterinitialization genetic algorithm uses a sort method to rankindividuals It compares each solution with other solutionsin the population to find whether it is dominated Duringthe process of creating a new generation it selects a suitableindividual according to the size of the fitness value Afterseveral generations the individual value gradually convergesto the best chromosome which is the optimal solution
The objective fitness function employed in this study isshown as follows
119869 = 06 times119910119887max
119910119887max
+ 04 timesradicsum119899
119894=1(119886119894max119886119894max)
2
119899 (9)
where 119910119887max and 119910119887max denote the peak base displacements
for the fuzzy control and uncontrolled cases respectively119886119894max and 119886119894max represent the peak superstructure accelera-tion for the fuzzy control and uncontrolled case respectively
The objective of genetic algorithm is tomake the objectivefitness function reach its minimum value by selecting oneset of parameters of supervisory fuzzy control and preload
Figure 10 Encoding structure for genetic algorithm
of piezoelectric friction damper The initial population sizegenetic algebra and crossover probability are set to 20 50and 08 respectively Through inputting the artificial earth-quakes which are characterized by near-fault earthquakesfor different ground sites the supervisory fuzzy control andpreload of piezoelectric friction dampers can be optimizedThe fuzzy control surfaces of optimized supervisory fuzzycontrol are shown in Figure 12
5 Linear Quadratic Gaussian Controller
LQG (Linear Quadratic Gaussian) method is based onKalman filter technique which has become a widely usedcontrol algorithm For comparison purpose LQG is adoptedto regulate the contact normal force of piezoelectric frictiondamper in the study The optimal controller takes groundacceleration as white noise and considers the velocity anddisplacement of base isolation as feedback signals Thecontrol performance index is defined as follows [22]
119869 = lim120591rarr+infin
1
120591
sdot 119864 int
120591
0
[Z (119905)119879QZ (119905) + U (119905)119879RU (119905)] 119889 (119905) (10)
where Q2119899times2119899
and R1times1
are semi-positive definite matrix andpositive definite matrix respectivelyThe control force can beobtained as follows
U (119905) = minusGZ (119905) (11)
G = Rminus1B119879P (12)
where P can be computed by the solution of the Riccatiequation as follows
minusPA minus A119879P + PBRminus1B119879P minusQ = 0 (13)
The control force obtained from the above equation isactive control force which could not be always achieved bypiezoelectric friction damper It is realized that the directionof active control force is opposite to the slipping direction ofpiezoelectric friction damper Therefore the desired controlforce119906
119889(119905) can be achieved according to the following criteria
Whether or not to meet thecondition of convergence
Figure 11 Flow chart of genetic algorithm
where 119906active is the control force obtained from LQG con-troller
119887is the velocity of base isolator119891max and119891min are the
maximum and minimum friction forces of the piezoelectricfriction damper respectively
6 Numerical Simulations
61 Model of the Base-Isolated Structure A five-story base-isolated building which is proposed by He et al is employedto evaluate the performance of developed fuzzy controllers[18] The fundamental period of the five-story building is03 s For the given isolation parameters the fundamentalperiod of the base-isolated building becomes 25 sThereforean isolation ratio 120575 equal to 83 (=2503) is obtainedThe model of the base-isolated structure with piezoelectricfriction damper is shown in Figure 13 The parameters of thebase-isolated structure are shown in Table 5
62 Performance Evaluation Index In order to evaluate theperformance of base-isolated structure for different controlalgorithms a total of nine performance indexes are employedin this study [23] as shown in Table 6
The performance indexes J1through J
5denote the struc-
ture responses for the controlled building normalized byuncontrolled structure respectively The performance indexJ6evaluates the peak control force normalized by the peak
base shear for controlled structure The performance indexesJ7and J8represent RMS (Root Mean Square) base displace-
ments and RMS floor accelerations respectively J9computes
the energy dissipated by friction dampers normalized by theearthquake input energy to the controlled structure
63 Simulation Results and Analysis A total of nine seis-mic excitations that contain six real ground motions andthree artificial earthquakes are selected to evaluate the per-formance of the optimized fuzzy logic controller In thisstudy the time histories of strong earthquake which rangefrom 20 s to 70 s are selected for numerical simulation andanalysis
The numerical results for various earthquakes are listedin Table 7 In the table the Genetic Algorithm HierarchicFuzzy Logic Control is named as GHFLC Moreover forcomparison purpose the results for an optimal controller andpassive operation of friction damper are also listed in thetable Numbers in bold font indicate the best results amongall control cases
Base displacement is an important index to evaluatethe effectiveness for different controllers For a base-isolatedstructure the reduction of base displacement is a primarypurpose to prevent permanent damage for isolation bearingsor adjacent buildings Although passive operation of frictiondampers can successfully reduce the performance indexassociated with the peak and RMS base displacements (J
3and
J7) it causes significant amplification in peak and RMS floor
accelerations (J5and J
8) for most cases due to the passive
control For example as compared to the uncontrolledstructure for TCU052 TCU053 and TCU054 earthquakespassive control leads to 6 45 and 42 amplification inpeak floor acceleration respectively However the proposedfuzzy controller can successfully improve the base-isolatedstructure acceleration at the cost of slight deterioration in theperformance indices J
3and J7on comparison with passive
control For example for TCU052 TCU053 and TCU054earthquakes GHFLC results in 15 13 and 16 decrease inpeak floor accelerations respectively As compared to passivecontrol there are 9 3 and 7 increase in peak basedisplacements
The time histories of friction force and force-displacement curves of friction dampers for differentcontrollers subjected to TCU052 earthquake are shown inFigure 14 From the figures it can be seen that the passivecontrol outputs lager damper force than GHFLC Becausethe supervisory fuzzy control can alter input normalizationfactors of sublevel FLC according to the current level ofground motion there are some serrations presented at theedge of the hysteretic curve of piezoelectric friction damper
The comparison of the performance indexes J3 J7 J5and
J8under different control cases is shown in Figures 15 and
16 respectively From these figures it can be seen that thefuzzy controller is more effective than passive and optimal
Mathematical Problems in Engineering 11O
utpu
t
009
055
026
000033
000094000
Input ground velocity (ms)
Nd
N
(a) Hard soilO
utpu
t
Input ground velocity (ms)
071
042
000
008000
037
103000
Nd
N
(b) Medium soil
Out
put
Input ground velocity (ms)
107
053
000045
011000
117000
Nd
N
(c) Soft soil
Figure 12 Control surface for optimized supervisory fuzzy control
PFD
Fixed reference
LRB
Figure 13 Model of the base-isolated structure
12 Mathematical Problems in Engineering
Table 6 Performance index
Peak base shear Peak interstory drift RMS base displacement
controller in simultaneously depressing the superstructureacceleration and base displacement For example the appli-cation of developed fuzzy controller leads to an average of112 decrease in peak floor acceleration and an average ofonly 36 increase in peak base displacement as compared topassive control Particularly optimal controller produces anaverage of only 41 reduction in peak floor acceleration and
leads to 79 increase in peak base displacement as comparedto passive control Therefore the improved fuzzy controlmethod shows better performance than passive and optimalcontrol
In order to further evaluate the performance of differentcontrollers the energy time histories for different controllersare compared with each other For a base-isolated structure
Mathematical Problems in Engineering 13
20 30 40 50 60 70minus20
minus10
00
10
20Fr
ictio
n fo
rce (
kN)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(a) Passive control
20 30 40 50 60 70minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(b) GHFLC method
Figure 14 Time histories of friction force and force-displacement diagram against TCU052 earthquake
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation case
Passive OptimalGHFLC
1 2 3 4 5 6 7 8 903
04
05
06
07
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 15 Comparisons on the performance indexes J3and J7for different control cases
14 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
Excitation case
Passive
GHFLC Optimal
J 8J 5
Figure 16 Comparison of the performance indexes J5and J8for different control cases
with piezoelectric friction dampers installed on the isolationthe energy equations are defined as follows
where 119864119870 119864120585 119864119878 119864119867 and 119864
119868denote the absolute kinetic
energy damping energy elastic strain energy energy dis-sipated by piezoelectric friction dampers and total inputenergy respectively The energy time histories for differentcontrollers against TCU052Chi-Chi earthquake are shown inFigure 17 It can be seen from the figures that the piezoelectricfriction dampers dissipate most of the input energy fordifferent control cases subjected to TCU052 earthquake
In order to compare different effects under near-faultground motions recorded for different sites the average ofinput energy and structure responses subjected to near-faultearthquakes are given in Table 8
As shown in Table 8 the near-fault earthquakes forsoft sites are more destructive than hard sites For instancecompared to hard sites the input energy and the base dis-placement of RMS of the base-isolated structure for soft soil
increase by 143 and 256 respectively However GHFLCpossesses favorable performance under different ground sitesand the damping effect has no distinctly direct relationshipwith site category
As discussed in Section 61 the isolation ratio of thesimulation model equals 83 In order to evaluate the effectsof isolation ratio on the damping performance of GHFLC thestiffness value of isolation is adjusted to 1045 and 452 kNmrespectively Then the numerical results for different valuesof isolation ratio (120575 = 4 6) are obtained The performanceindexes J
3and J5for different isolation ratios are shown in
Figures 18 and 19 respectivelyFor base-isolated structure isolation ratio has a signifi-
cant influence on the isolation effect A larger isolation ratiowhich means a minor stiffness value of isolation usuallyleads to conspicuous enlargement of base displacement anddecrease of superstructural responses due to the increaseof fundamental vibration period and vice versa Howeveras shown in Figures 18 and 19 the shock absorption rateof GHFLC has little change when isolation ratio variesdifferently and the proposed fuzzy control shows favorableeffectiveness in the diverse isolation ratios of base-isolatedstructures
7 Conclusions
In this study an optimized fuzzy logic control which isdesigned for Chi-Chi near-fault earthquakes under differentground sites is proposed An elastic design spectrum isproposed to generate near-fault earthquakes for differentground sitesThe characteristic of the design spectrum is thatit has larger periods and peak acceleration than conventionalspectrum Genetic algorithm is employed to optimize thesupervisory fuzzy controller and preload of piezoelectric
Mathematical Problems in Engineering 15
Table 8 Average ofinput energy and structure responses subjected to near-fault earthquakes
Site classification Input energy (kNsdotm) Base shear (kN) Base displacement ofRMS (m)
Figure 17 Energy time histories subjected to Chi-Chi TCU052 earthquake
friction dampers according to three artificial earthquakesthat are characterized by Chi-Chi earthquakes Passive andoptimal controllers are also compared with the performanceof the developed fuzzy controller The simulation resultsreveal that the developed semiactive fuzzy controller hasbetter performance than traditional passive and optimal con-troller in simultaneously reducing the base displacement and
floor acceleration under near-fault earthquakes for differentground sites
Conflict of Interests
The authors declare no conflict of interests regarding thepublication of this paper
16 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation case
Passive
GHFLC Optimal
J 3 J 5Figure 18 Comparisons on the performance indexes J
3and J5for different control cases (120575 = 4)
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 19 Comparisons on the performance indexes J3and J5for different control cases (120575 = 6)
Acknowledgments
This research was supported by National Natural ScienceFoundation of China under Grant no 51308487 no 41402261and no 51408526 Hebei Provincial Natural Science Founda-tion ofChina underGrant no E2014203055 and the ExcellentYouth Foundation of Hebei Educational Committee underGrant no YQ2013015 The support for this research is greatlyappreciated
References
[1] C Alhan and H Gavin ldquoA parametric study of linear and non-linear passively damped seismic isolation systems for buildingsrdquoEngineering Structures vol 26 no 4 pp 485ndash497 2004
[2] R S Jangid and J M Kelly ldquoBase isolation for near-faultmotionsrdquoEarthquake Engineering and Structural Dynamics vol30 no 5 pp 691ndash707 2001
[3] J Shen M-H Tsai K-C Chang and G C Lee ldquoPerformanceof a seismically isolated bridge under near-fault earthquake
[4] F Mazza A Vulcano and M Mazza ldquoNonlinear dynamicresponse of RC buildings with different base Isolation systemssubjected to horizontal and vertical components of near-faultground motionsrdquo Open Construction and Building TechnologyJournal vol 6 pp 373ndash383 2012
[5] F Mazza and A Vulcano ldquoEffects of near-fault ground motionson the nonlinear dynamic response of base-isolated rc framedbuildingsrdquo Earthquake Engineering and Structural Dynamicsvol 41 no 2 pp 211ndash232 2012
[6] O E Ozbulut and S Hurlebaus ldquoFuzzy control of piezoelectricfriction dampers for seismic protection of smart base isolatedbuildingsrdquo Bulletin of Earthquake Engineering vol 8 no 6 pp1435ndash1455 2010
[7] O E Ozbulut M Bitaraf and S Hurlebaus ldquoAdaptive controlof base-isolated structures against near-field earthquakes usingvariable friction dampersrdquo Engineering Structures vol 33 no12 pp 3143ndash3154 2011
[8] J M Kelly ldquoThe role of damping in seismic isolationrdquo Earth-quake Engineering and Structural Dynamics vol 28 no 1 pp3ndash20 1999
[9] F Mazza and A Vulcano ldquoNonlinear response of RC framedbuildings with isolation and supplemental damping at the basesubjected to near-fault earthquakesrdquo Journal of EarthquakeEngineering vol 13 no 5 pp 690ndash715 2009
[10] M Bitaraf and S Hurlebaus ldquoSemi-active adaptive control ofseismically excited 20-story nonlinear buildingrdquo EngineeringStructures vol 56 no 11 pp 2107ndash2118 2013
[11] D Das T K Datta and A Madan ldquoSemiactive fuzzy controlof the seismic response of building frames with MR dampersrdquoEarthquake Engineering and Structural Dynamics vol 41 no 1pp 99ndash118 2012
[12] A-P Wang and C-D Lee ldquoFuzzy sliding mode control for abuilding structure based on genetic algorithmsrdquo EarthquakeEngineering and Structural Dynamics vol 31 no 4 pp 881ndash8952002
[13] D G Reigles and M D Symans ldquoSupervisory fuzzy controlof a base-isolated benchmark building utilizing a neuro-fuzzymodel of controllable fluid viscous dampersrdquo Structural Controland Health Monitoring vol 13 no 2-3 pp 724ndash747 2006
[14] H-S Kim and P N Roschke ldquoGA-fuzzy control of smartbase isolated benchmark building using supervisory controltechniquerdquo Advances in Engineering Software vol 38 no 7 pp453ndash465 2007
[15] D Yang and Y Zhao ldquoEffects of rupture forward directivity andfling step of near-fault groundmotions on seismic performanceof base-isolated building structurerdquo Acta Seismologica Sinicavol 32 no 5 pp 579ndash587 2010
[16] Y E-A Mohamedzein J A Abdalla and A Abdelwahab ldquoSiteresponse and earthquake design spectra for central KhartoumSudanrdquoBulletin of Earthquake Engineering vol 4 no 3 pp 277ndash293 2006
[17] D Zhao and H Li ldquoShaking table tests and analyses of semi-active fuzzy control for structural seismic reduction with apiezoelectric variable-friction damperrdquo Smart Materials andStructures vol 19 no 10 Article ID 105031 2010
[18] W L He A K Agrawal and J N Yang ldquoNovel semiactivefriction controller for linear structures against earthquakesrdquoJournal of Structural Engineering vol 129 no 7 pp 941ndash9502003
[19] J N Yang and A K Agrawal ldquoSemi-active hybrid controlsystems for nonlinear buildings against near-field earthquakesrdquoEngineering Structures vol 24 no 3 pp 271ndash280 2002
[20] O E Ozbulut and S Hurlebaus ldquoOptimal design of supere-lastic-friction base isolators for seismic protection of highwaybridges against near-field earthquakesrdquo Earthquake Engineeringand Structural Dynamics vol 40 no 3 pp 273ndash291 2011
[21] D A Shook P N Roschke and O E Ozbulut ldquoSuperelasticsemi-active damping of a base-isolated structurerdquo StructuralControl and HealthMonitoring vol 15 no 5 pp 746ndash768 2008
[22] K D PhamG JinM K Sain B F Spencer Jr and S R LibertyldquoGeneralized linear quadratic Gaussian techniques for the windbenchmark problemrdquo Journal of Engineering Mechanics vol130 no 4 pp 466ndash470 2004
[23] S Nagarajaiah and S Narasimhan ldquoSmart base-isolated bench-mark building Part II Phase I sample controllers for linearisolation systemsrdquo Structural Control and Health Monitoringvol 13 no 2-3 pp 605ndash625 2006
Figure 2 Design spectrum envelopes for Chi-Chi earthquake
Time
d
I(t)
atb tdtc
b c
I(t) = (ttb)2
I(t) = e03(tc minus t)
Figure 3 Envelop for artificial earthquake
Mathematical Problems in Engineering 5
0 2 4 6 8 10 12 14 16 18 20
minus03
minus02
minus01
00
01
02
03
Acce
lera
tion
(g)
Time (s)
(a) Time history of acceleration
0 2 4 6 8 10 12 14 16 18 20
minus09
minus06
minus03
00
03
06
09
Velo
city
(ms
)
Time (s)
(b) Time history of velocity
Figure 4 Artificial earthquakes for hard soil site
0 2 4 6 8 10 12 14 16 18 20
minus03
minus02
minus01
00
01
02
03
Acce
lera
tion
(g)
Time (s)
(a) Time history of acceleration
0 2 4 6 8 10 12 14 16 18 20
minus09
minus06
minus03
00
03
06
09Ve
loci
ty (m
s)
Time (s)
(b) Time history of velocity
Figure 5 Artificial earthquake for medium soil site
0 2 4 6 8 10 12 14 16 18 20
minus03
minus02
minus01
00
01
02
03
Acce
lera
tion
(g)
Time (s)
(a) Time history of acceleration
0 2 4 6 8 10 12 14 16 18 20
minus09
minus06
minus03
00
03
06
09
Velo
city
(ms
)
Time (s)
(b) Time history of velocity
Figure 6 Artificial earthquake for soft soil site
6 Mathematical Problems in Engineering
the time history of the generated artificial earthquakes for softsoil is distinct with the other Particularly the peak velocityreaches 09ms which is significantly greater than the other
3 Model of Base-Isolated Structure andPiezoelectric Friction Damper
31 Equation of Motion for Base-Isolated Structure Consideran n-degree of freedom base-isolated structure with a piezo-electric friction damper at the isolation floor the dynamicequation of the base-isolated system is given by
where M C and K represent 119899 times 119899 mass damping andstiffness matrices respectively X(119905) X(119905) and X(119905) are theacceleration velocity and displacement vectors respectivelyU(119905) is the control force generated by the piezoelectric frictiondamper and
119892(119905) is the earthquake acceleration
Rewriting (2) in state-space form gives
Z (119905) = AZ (119905) + BU (119905) + E119892(119905) (3)
where
Z (119905) = [X (119905)X (119905)
]
E = [0119899times1
Mminus1E119904
]
B = [0119899times1
Mminus1B119904
]
A = [0119899times119899
I119899times119899
minusMminus1K minusMminus1C]
(4)
32 Model of Piezoelectric Friction Damper Piezoelectricfriction damper is a novel semiactive control device whichutilizes piezoelectric stacks to regulate the damping forceto provide a satisfying level of friction force Recently theauthors also proposed a piezoelectric friction damper andinvestigated their performances theoretically and experimen-tally [17]
During the movement of the base-isolated structure afriction damper has two possible motion states sticking andslipping phases [18 19] The friction force of the piezoelectricfriction damper is given as [20]
minus120583119873 (119905) le 119891 (119905) le 120583119873 (119905) = 0
(5)
where 119873(119905) is the total contact force 119873pre represents thepreload of the piezoelectric friction damper 119862pz is thepiezoelectric coefficient of the piezoelectric actuator 119881(119905)is the input voltage of piezoelectric stack actuator 120583 is the
Table 3 Parameters of piezoelectric friction damper
friction coefficient of the damper sgn(sdot) represents the signfunction related to the slip rate of the damper and 119891(119905)denotes damping force of piezoelectric friction damper
However the static state of the piezoelectric frictiondamper is complex to be estimated Shook et al [21] proposedan approximate calculation formula for the sticking frictionforce as given in the following
119891119904= minus120583119873 (119905) sgn ()
when 119891119904=1003816100381610038161003816119891119894 + 119891119903
where 119891119894is the inertial force applied on the mass 119891
119903is the
restoring force provided by the isolation bearing 119898119894is the
mass of the superstructure 119898119887and 119896
119887are the mass and
stiffness of base isolator and 119909119887is the displacement of base
isolatorThe parameters of piezoelectric friction damper are listed
in Table 3 And the preload of the piezoelectric frictiondamper can be optimized by genetic algorithm
4 GA-Based Hierarchic Fuzzy ControlAlgorithm
41 Framework of the Developed Fuzzy Logic Controller Thecontroller adopts a hierarchic fuzzy control algorithm inwhich a supervisory fuzzy controller governs a sublevelfuzzy controller by altering its input normalization factorsaccording to the current level of groundmotionThe sublevelfuzzy logic controller is designed to determine the commandvoltage of piezoelectric friction damper according to thevelocity and displacement of base isolation Piezoelectricfriction damper regulates the damping force according tothe input voltage Genetic algorithm is employed to optimizesupervisory fuzzy controller and preload of piezoelectricfriction damper according to an objective function and thegenerated artificial earthquakes for different ground sitesTheblock diagram of the system for the developed controller isshown in Figure 7
42 Sublevel Fuzzy Controller The sublevel fuzzy controlleris established in order to determine the command voltage ofthe piezoelectric friction damper The isolation displacementand velocity are selected as two input variables and commandvoltage is employed as a single output variable as shown inFigure 8The definitions of themembership function of input
Mathematical Problems in Engineering 7
Ground motion
Damping force
Semiactiveisolated
structure
Piezoelectricfriction damper
Ground velocity
Optimize
Voltage
Structural response
Isolation velocity and displacement
Sublevel fuzzycontroller
Supervisoryfuzzy controller
Optimize
Genetic algorithm
Nd
N
Figure 7 Block diagram of the base-isolated system for the fuzzy controller
minus10 minus05 00 05 100
1PL
PMPSZENSNM
Deg
ree o
f mem
bers
hip
Normalized displacement
NL
00 05 100
1PL
PMPSZENSNM
Deg
ree o
f mem
bers
hip
Normalized velocity
NL
0 200 400 600 800 10000
1VL
LMS
Deg
ree o
f mem
bers
hip
Voltage (V)
ZE
minus10 minus05
Figure 8 Input and output membership functions of sublevel fuzzy control
variables are as follows NL negative large NM negativemedium NS negative small ZE zero PS positive small PMpositive medium and PL positive large The definition ofthe membership function of output variable is as follows ZEzero S small M medium L large and VL very large Themembership functions are employed Gaussian type for inputand output variables The fuzzy control rules are defined inTable 4
In the establishment of fuzzy control rules it followsthe following principles if the isolation displacement andvelocity are in opposite sign then the output voltage becomessmall in order to ensure output small damping force inthe piezoelectric friction damper Contrarily if the isolationdisplacement and velocity have the same sign the outputvoltage becomes large Certainly when the displacement andvelocity are almost zero or small the command voltage is
8 Mathematical Problems in Engineering
Table 4 Fuzzy control rules adopted for sublevel fuzzy control
Velocity ofisolated floor
Displacement of isolated floorNL NM NS ZE PS PM PL
NL VL VL L L M S ZENM VL L L M S ZE SNS L L M S ZE S MZE L M S ZE S M LPS M S ZE S M L LPM S ZE S M L L VLPL ZE S M L L VL VL
minus1minus05
005
1
minus1minus05
005
1
500
1000
VelocityDisplacement
Volta
ge (V
)
Figure 9 Fuzzy control surface for sublevel fuzzy controller
about zero this means that piezoelectric friction damper actsas a passive friction damper The defuzzification of fuzzycontrol adopts the method of centroid to get a crisp outputvalue The control surface and color-filled contour line ofsublevel fuzzy control are depicted in Figure 9
43 Supervisory Fuzzy Logic Controller In the fuzzy logiccontrol normalization factors need to satisfy a certain objec-tive The oversize normalization factors can enlarge the basedisplacement effectively Contrarily too small normalizationfactors can result in large control force that amplifies theaccelerations of base-isolated structure Thus a supervisoryfuzzy logic control is proposed to adjust its normalizationfactors in real-time As discussed earlier near-fault earth-quakes usually have long duration pulses with peak velocitiesThus the supervisory fuzzy control employs ground velocityas single input variable to identify the characteristics ofthe ground motion The normalization factors of sublevelfuzzy control are selected as two output variables HereGaussian membership functions are used for input andoutput variables as shown in
120583gauss = exp[minus(119909 minus 119888)2
21205902] (7)
where 119888 and 120590 are the constant values that define the shape ofthe Gauss functions respectively
The rules of the supervisory fuzzy controller are definedby the following form
Rule119894 IF 119883 is 119860119894 then 1198841is 1198621198941 1198842is 1198621198942
119894 = 1 2 119872
(8)
where119872 is the number of fuzzy control rules 119883 is the inputvariable 119884
1and 119884
2are the output variables 119860119894 119862119894
1 and 119862119894
2
are the linguistic values characterized by input and outputmembership functions respectively One fuzzy control ruleis described by three Gaussian membership functions andeach membership function can be defined by two parameters(119888 and 120590) Therefore a total of five fuzzy control rules canbe optimized by encoding these two parameters into thegene using genetic algorithm Consequently a total of 30parameters are encoded into the chromosome to define theinference system of supervisory fuzzy controller as shown inFigure 10
Similar to normalization factors the preload of thepiezoelectric friction dampers has a great influence on thedamping effect Thus it is essential to establish an effectivesupervisory fuzzy logic controller and a suitable preloadof piezoelectric friction damper Generally for the seismicprotection of a base-isolated structure there is a trade-off between the isolation displacement and superstructureacceleration The main control objective is to depress theisolation displacementwithout excessively increasing acceler-ation response of the superstructure In this section a geneticalgorithm is employed to seek out an optimal solution forthe control of the base-isolated structure The flow chart ofgenetic algorithm is shown in Figure 11
Genetic algorithm is a computational model for thesimulation of Darwin natural genetic selection and biologicalevolution Different from the traditional search algorithmgenetic algorithm begins to search a group of optimal solu-tions from an initial random population by mutation andrecombination Each individual which consists of a set ofbinary strings is a solution to the objective problem Afterinitialization genetic algorithm uses a sort method to rankindividuals It compares each solution with other solutionsin the population to find whether it is dominated Duringthe process of creating a new generation it selects a suitableindividual according to the size of the fitness value Afterseveral generations the individual value gradually convergesto the best chromosome which is the optimal solution
The objective fitness function employed in this study isshown as follows
119869 = 06 times119910119887max
119910119887max
+ 04 timesradicsum119899
119894=1(119886119894max119886119894max)
2
119899 (9)
where 119910119887max and 119910119887max denote the peak base displacements
for the fuzzy control and uncontrolled cases respectively119886119894max and 119886119894max represent the peak superstructure accelera-tion for the fuzzy control and uncontrolled case respectively
The objective of genetic algorithm is tomake the objectivefitness function reach its minimum value by selecting oneset of parameters of supervisory fuzzy control and preload
Figure 10 Encoding structure for genetic algorithm
of piezoelectric friction damper The initial population sizegenetic algebra and crossover probability are set to 20 50and 08 respectively Through inputting the artificial earth-quakes which are characterized by near-fault earthquakesfor different ground sites the supervisory fuzzy control andpreload of piezoelectric friction dampers can be optimizedThe fuzzy control surfaces of optimized supervisory fuzzycontrol are shown in Figure 12
5 Linear Quadratic Gaussian Controller
LQG (Linear Quadratic Gaussian) method is based onKalman filter technique which has become a widely usedcontrol algorithm For comparison purpose LQG is adoptedto regulate the contact normal force of piezoelectric frictiondamper in the study The optimal controller takes groundacceleration as white noise and considers the velocity anddisplacement of base isolation as feedback signals Thecontrol performance index is defined as follows [22]
119869 = lim120591rarr+infin
1
120591
sdot 119864 int
120591
0
[Z (119905)119879QZ (119905) + U (119905)119879RU (119905)] 119889 (119905) (10)
where Q2119899times2119899
and R1times1
are semi-positive definite matrix andpositive definite matrix respectivelyThe control force can beobtained as follows
U (119905) = minusGZ (119905) (11)
G = Rminus1B119879P (12)
where P can be computed by the solution of the Riccatiequation as follows
minusPA minus A119879P + PBRminus1B119879P minusQ = 0 (13)
The control force obtained from the above equation isactive control force which could not be always achieved bypiezoelectric friction damper It is realized that the directionof active control force is opposite to the slipping direction ofpiezoelectric friction damper Therefore the desired controlforce119906
119889(119905) can be achieved according to the following criteria
Whether or not to meet thecondition of convergence
Figure 11 Flow chart of genetic algorithm
where 119906active is the control force obtained from LQG con-troller
119887is the velocity of base isolator119891max and119891min are the
maximum and minimum friction forces of the piezoelectricfriction damper respectively
6 Numerical Simulations
61 Model of the Base-Isolated Structure A five-story base-isolated building which is proposed by He et al is employedto evaluate the performance of developed fuzzy controllers[18] The fundamental period of the five-story building is03 s For the given isolation parameters the fundamentalperiod of the base-isolated building becomes 25 sThereforean isolation ratio 120575 equal to 83 (=2503) is obtainedThe model of the base-isolated structure with piezoelectricfriction damper is shown in Figure 13 The parameters of thebase-isolated structure are shown in Table 5
62 Performance Evaluation Index In order to evaluate theperformance of base-isolated structure for different controlalgorithms a total of nine performance indexes are employedin this study [23] as shown in Table 6
The performance indexes J1through J
5denote the struc-
ture responses for the controlled building normalized byuncontrolled structure respectively The performance indexJ6evaluates the peak control force normalized by the peak
base shear for controlled structure The performance indexesJ7and J8represent RMS (Root Mean Square) base displace-
ments and RMS floor accelerations respectively J9computes
the energy dissipated by friction dampers normalized by theearthquake input energy to the controlled structure
63 Simulation Results and Analysis A total of nine seis-mic excitations that contain six real ground motions andthree artificial earthquakes are selected to evaluate the per-formance of the optimized fuzzy logic controller In thisstudy the time histories of strong earthquake which rangefrom 20 s to 70 s are selected for numerical simulation andanalysis
The numerical results for various earthquakes are listedin Table 7 In the table the Genetic Algorithm HierarchicFuzzy Logic Control is named as GHFLC Moreover forcomparison purpose the results for an optimal controller andpassive operation of friction damper are also listed in thetable Numbers in bold font indicate the best results amongall control cases
Base displacement is an important index to evaluatethe effectiveness for different controllers For a base-isolatedstructure the reduction of base displacement is a primarypurpose to prevent permanent damage for isolation bearingsor adjacent buildings Although passive operation of frictiondampers can successfully reduce the performance indexassociated with the peak and RMS base displacements (J
3and
J7) it causes significant amplification in peak and RMS floor
accelerations (J5and J
8) for most cases due to the passive
control For example as compared to the uncontrolledstructure for TCU052 TCU053 and TCU054 earthquakespassive control leads to 6 45 and 42 amplification inpeak floor acceleration respectively However the proposedfuzzy controller can successfully improve the base-isolatedstructure acceleration at the cost of slight deterioration in theperformance indices J
3and J7on comparison with passive
control For example for TCU052 TCU053 and TCU054earthquakes GHFLC results in 15 13 and 16 decrease inpeak floor accelerations respectively As compared to passivecontrol there are 9 3 and 7 increase in peak basedisplacements
The time histories of friction force and force-displacement curves of friction dampers for differentcontrollers subjected to TCU052 earthquake are shown inFigure 14 From the figures it can be seen that the passivecontrol outputs lager damper force than GHFLC Becausethe supervisory fuzzy control can alter input normalizationfactors of sublevel FLC according to the current level ofground motion there are some serrations presented at theedge of the hysteretic curve of piezoelectric friction damper
The comparison of the performance indexes J3 J7 J5and
J8under different control cases is shown in Figures 15 and
16 respectively From these figures it can be seen that thefuzzy controller is more effective than passive and optimal
Mathematical Problems in Engineering 11O
utpu
t
009
055
026
000033
000094000
Input ground velocity (ms)
Nd
N
(a) Hard soilO
utpu
t
Input ground velocity (ms)
071
042
000
008000
037
103000
Nd
N
(b) Medium soil
Out
put
Input ground velocity (ms)
107
053
000045
011000
117000
Nd
N
(c) Soft soil
Figure 12 Control surface for optimized supervisory fuzzy control
PFD
Fixed reference
LRB
Figure 13 Model of the base-isolated structure
12 Mathematical Problems in Engineering
Table 6 Performance index
Peak base shear Peak interstory drift RMS base displacement
controller in simultaneously depressing the superstructureacceleration and base displacement For example the appli-cation of developed fuzzy controller leads to an average of112 decrease in peak floor acceleration and an average ofonly 36 increase in peak base displacement as compared topassive control Particularly optimal controller produces anaverage of only 41 reduction in peak floor acceleration and
leads to 79 increase in peak base displacement as comparedto passive control Therefore the improved fuzzy controlmethod shows better performance than passive and optimalcontrol
In order to further evaluate the performance of differentcontrollers the energy time histories for different controllersare compared with each other For a base-isolated structure
Mathematical Problems in Engineering 13
20 30 40 50 60 70minus20
minus10
00
10
20Fr
ictio
n fo
rce (
kN)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(a) Passive control
20 30 40 50 60 70minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(b) GHFLC method
Figure 14 Time histories of friction force and force-displacement diagram against TCU052 earthquake
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation case
Passive OptimalGHFLC
1 2 3 4 5 6 7 8 903
04
05
06
07
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 15 Comparisons on the performance indexes J3and J7for different control cases
14 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
Excitation case
Passive
GHFLC Optimal
J 8J 5
Figure 16 Comparison of the performance indexes J5and J8for different control cases
with piezoelectric friction dampers installed on the isolationthe energy equations are defined as follows
where 119864119870 119864120585 119864119878 119864119867 and 119864
119868denote the absolute kinetic
energy damping energy elastic strain energy energy dis-sipated by piezoelectric friction dampers and total inputenergy respectively The energy time histories for differentcontrollers against TCU052Chi-Chi earthquake are shown inFigure 17 It can be seen from the figures that the piezoelectricfriction dampers dissipate most of the input energy fordifferent control cases subjected to TCU052 earthquake
In order to compare different effects under near-faultground motions recorded for different sites the average ofinput energy and structure responses subjected to near-faultearthquakes are given in Table 8
As shown in Table 8 the near-fault earthquakes forsoft sites are more destructive than hard sites For instancecompared to hard sites the input energy and the base dis-placement of RMS of the base-isolated structure for soft soil
increase by 143 and 256 respectively However GHFLCpossesses favorable performance under different ground sitesand the damping effect has no distinctly direct relationshipwith site category
As discussed in Section 61 the isolation ratio of thesimulation model equals 83 In order to evaluate the effectsof isolation ratio on the damping performance of GHFLC thestiffness value of isolation is adjusted to 1045 and 452 kNmrespectively Then the numerical results for different valuesof isolation ratio (120575 = 4 6) are obtained The performanceindexes J
3and J5for different isolation ratios are shown in
Figures 18 and 19 respectivelyFor base-isolated structure isolation ratio has a signifi-
cant influence on the isolation effect A larger isolation ratiowhich means a minor stiffness value of isolation usuallyleads to conspicuous enlargement of base displacement anddecrease of superstructural responses due to the increaseof fundamental vibration period and vice versa Howeveras shown in Figures 18 and 19 the shock absorption rateof GHFLC has little change when isolation ratio variesdifferently and the proposed fuzzy control shows favorableeffectiveness in the diverse isolation ratios of base-isolatedstructures
7 Conclusions
In this study an optimized fuzzy logic control which isdesigned for Chi-Chi near-fault earthquakes under differentground sites is proposed An elastic design spectrum isproposed to generate near-fault earthquakes for differentground sitesThe characteristic of the design spectrum is thatit has larger periods and peak acceleration than conventionalspectrum Genetic algorithm is employed to optimize thesupervisory fuzzy controller and preload of piezoelectric
Mathematical Problems in Engineering 15
Table 8 Average ofinput energy and structure responses subjected to near-fault earthquakes
Site classification Input energy (kNsdotm) Base shear (kN) Base displacement ofRMS (m)
Figure 17 Energy time histories subjected to Chi-Chi TCU052 earthquake
friction dampers according to three artificial earthquakesthat are characterized by Chi-Chi earthquakes Passive andoptimal controllers are also compared with the performanceof the developed fuzzy controller The simulation resultsreveal that the developed semiactive fuzzy controller hasbetter performance than traditional passive and optimal con-troller in simultaneously reducing the base displacement and
floor acceleration under near-fault earthquakes for differentground sites
Conflict of Interests
The authors declare no conflict of interests regarding thepublication of this paper
16 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation case
Passive
GHFLC Optimal
J 3 J 5Figure 18 Comparisons on the performance indexes J
3and J5for different control cases (120575 = 4)
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 19 Comparisons on the performance indexes J3and J5for different control cases (120575 = 6)
Acknowledgments
This research was supported by National Natural ScienceFoundation of China under Grant no 51308487 no 41402261and no 51408526 Hebei Provincial Natural Science Founda-tion ofChina underGrant no E2014203055 and the ExcellentYouth Foundation of Hebei Educational Committee underGrant no YQ2013015 The support for this research is greatlyappreciated
References
[1] C Alhan and H Gavin ldquoA parametric study of linear and non-linear passively damped seismic isolation systems for buildingsrdquoEngineering Structures vol 26 no 4 pp 485ndash497 2004
[2] R S Jangid and J M Kelly ldquoBase isolation for near-faultmotionsrdquoEarthquake Engineering and Structural Dynamics vol30 no 5 pp 691ndash707 2001
[3] J Shen M-H Tsai K-C Chang and G C Lee ldquoPerformanceof a seismically isolated bridge under near-fault earthquake
[4] F Mazza A Vulcano and M Mazza ldquoNonlinear dynamicresponse of RC buildings with different base Isolation systemssubjected to horizontal and vertical components of near-faultground motionsrdquo Open Construction and Building TechnologyJournal vol 6 pp 373ndash383 2012
[5] F Mazza and A Vulcano ldquoEffects of near-fault ground motionson the nonlinear dynamic response of base-isolated rc framedbuildingsrdquo Earthquake Engineering and Structural Dynamicsvol 41 no 2 pp 211ndash232 2012
[6] O E Ozbulut and S Hurlebaus ldquoFuzzy control of piezoelectricfriction dampers for seismic protection of smart base isolatedbuildingsrdquo Bulletin of Earthquake Engineering vol 8 no 6 pp1435ndash1455 2010
[7] O E Ozbulut M Bitaraf and S Hurlebaus ldquoAdaptive controlof base-isolated structures against near-field earthquakes usingvariable friction dampersrdquo Engineering Structures vol 33 no12 pp 3143ndash3154 2011
[8] J M Kelly ldquoThe role of damping in seismic isolationrdquo Earth-quake Engineering and Structural Dynamics vol 28 no 1 pp3ndash20 1999
[9] F Mazza and A Vulcano ldquoNonlinear response of RC framedbuildings with isolation and supplemental damping at the basesubjected to near-fault earthquakesrdquo Journal of EarthquakeEngineering vol 13 no 5 pp 690ndash715 2009
[10] M Bitaraf and S Hurlebaus ldquoSemi-active adaptive control ofseismically excited 20-story nonlinear buildingrdquo EngineeringStructures vol 56 no 11 pp 2107ndash2118 2013
[11] D Das T K Datta and A Madan ldquoSemiactive fuzzy controlof the seismic response of building frames with MR dampersrdquoEarthquake Engineering and Structural Dynamics vol 41 no 1pp 99ndash118 2012
[12] A-P Wang and C-D Lee ldquoFuzzy sliding mode control for abuilding structure based on genetic algorithmsrdquo EarthquakeEngineering and Structural Dynamics vol 31 no 4 pp 881ndash8952002
[13] D G Reigles and M D Symans ldquoSupervisory fuzzy controlof a base-isolated benchmark building utilizing a neuro-fuzzymodel of controllable fluid viscous dampersrdquo Structural Controland Health Monitoring vol 13 no 2-3 pp 724ndash747 2006
[14] H-S Kim and P N Roschke ldquoGA-fuzzy control of smartbase isolated benchmark building using supervisory controltechniquerdquo Advances in Engineering Software vol 38 no 7 pp453ndash465 2007
[15] D Yang and Y Zhao ldquoEffects of rupture forward directivity andfling step of near-fault groundmotions on seismic performanceof base-isolated building structurerdquo Acta Seismologica Sinicavol 32 no 5 pp 579ndash587 2010
[16] Y E-A Mohamedzein J A Abdalla and A Abdelwahab ldquoSiteresponse and earthquake design spectra for central KhartoumSudanrdquoBulletin of Earthquake Engineering vol 4 no 3 pp 277ndash293 2006
[17] D Zhao and H Li ldquoShaking table tests and analyses of semi-active fuzzy control for structural seismic reduction with apiezoelectric variable-friction damperrdquo Smart Materials andStructures vol 19 no 10 Article ID 105031 2010
[18] W L He A K Agrawal and J N Yang ldquoNovel semiactivefriction controller for linear structures against earthquakesrdquoJournal of Structural Engineering vol 129 no 7 pp 941ndash9502003
[19] J N Yang and A K Agrawal ldquoSemi-active hybrid controlsystems for nonlinear buildings against near-field earthquakesrdquoEngineering Structures vol 24 no 3 pp 271ndash280 2002
[20] O E Ozbulut and S Hurlebaus ldquoOptimal design of supere-lastic-friction base isolators for seismic protection of highwaybridges against near-field earthquakesrdquo Earthquake Engineeringand Structural Dynamics vol 40 no 3 pp 273ndash291 2011
[21] D A Shook P N Roschke and O E Ozbulut ldquoSuperelasticsemi-active damping of a base-isolated structurerdquo StructuralControl and HealthMonitoring vol 15 no 5 pp 746ndash768 2008
[22] K D PhamG JinM K Sain B F Spencer Jr and S R LibertyldquoGeneralized linear quadratic Gaussian techniques for the windbenchmark problemrdquo Journal of Engineering Mechanics vol130 no 4 pp 466ndash470 2004
[23] S Nagarajaiah and S Narasimhan ldquoSmart base-isolated bench-mark building Part II Phase I sample controllers for linearisolation systemsrdquo Structural Control and Health Monitoringvol 13 no 2-3 pp 605ndash625 2006
Figure 4 Artificial earthquakes for hard soil site
0 2 4 6 8 10 12 14 16 18 20
minus03
minus02
minus01
00
01
02
03
Acce
lera
tion
(g)
Time (s)
(a) Time history of acceleration
0 2 4 6 8 10 12 14 16 18 20
minus09
minus06
minus03
00
03
06
09Ve
loci
ty (m
s)
Time (s)
(b) Time history of velocity
Figure 5 Artificial earthquake for medium soil site
0 2 4 6 8 10 12 14 16 18 20
minus03
minus02
minus01
00
01
02
03
Acce
lera
tion
(g)
Time (s)
(a) Time history of acceleration
0 2 4 6 8 10 12 14 16 18 20
minus09
minus06
minus03
00
03
06
09
Velo
city
(ms
)
Time (s)
(b) Time history of velocity
Figure 6 Artificial earthquake for soft soil site
6 Mathematical Problems in Engineering
the time history of the generated artificial earthquakes for softsoil is distinct with the other Particularly the peak velocityreaches 09ms which is significantly greater than the other
3 Model of Base-Isolated Structure andPiezoelectric Friction Damper
31 Equation of Motion for Base-Isolated Structure Consideran n-degree of freedom base-isolated structure with a piezo-electric friction damper at the isolation floor the dynamicequation of the base-isolated system is given by
where M C and K represent 119899 times 119899 mass damping andstiffness matrices respectively X(119905) X(119905) and X(119905) are theacceleration velocity and displacement vectors respectivelyU(119905) is the control force generated by the piezoelectric frictiondamper and
119892(119905) is the earthquake acceleration
Rewriting (2) in state-space form gives
Z (119905) = AZ (119905) + BU (119905) + E119892(119905) (3)
where
Z (119905) = [X (119905)X (119905)
]
E = [0119899times1
Mminus1E119904
]
B = [0119899times1
Mminus1B119904
]
A = [0119899times119899
I119899times119899
minusMminus1K minusMminus1C]
(4)
32 Model of Piezoelectric Friction Damper Piezoelectricfriction damper is a novel semiactive control device whichutilizes piezoelectric stacks to regulate the damping forceto provide a satisfying level of friction force Recently theauthors also proposed a piezoelectric friction damper andinvestigated their performances theoretically and experimen-tally [17]
During the movement of the base-isolated structure afriction damper has two possible motion states sticking andslipping phases [18 19] The friction force of the piezoelectricfriction damper is given as [20]
minus120583119873 (119905) le 119891 (119905) le 120583119873 (119905) = 0
(5)
where 119873(119905) is the total contact force 119873pre represents thepreload of the piezoelectric friction damper 119862pz is thepiezoelectric coefficient of the piezoelectric actuator 119881(119905)is the input voltage of piezoelectric stack actuator 120583 is the
Table 3 Parameters of piezoelectric friction damper
friction coefficient of the damper sgn(sdot) represents the signfunction related to the slip rate of the damper and 119891(119905)denotes damping force of piezoelectric friction damper
However the static state of the piezoelectric frictiondamper is complex to be estimated Shook et al [21] proposedan approximate calculation formula for the sticking frictionforce as given in the following
119891119904= minus120583119873 (119905) sgn ()
when 119891119904=1003816100381610038161003816119891119894 + 119891119903
where 119891119894is the inertial force applied on the mass 119891
119903is the
restoring force provided by the isolation bearing 119898119894is the
mass of the superstructure 119898119887and 119896
119887are the mass and
stiffness of base isolator and 119909119887is the displacement of base
isolatorThe parameters of piezoelectric friction damper are listed
in Table 3 And the preload of the piezoelectric frictiondamper can be optimized by genetic algorithm
4 GA-Based Hierarchic Fuzzy ControlAlgorithm
41 Framework of the Developed Fuzzy Logic Controller Thecontroller adopts a hierarchic fuzzy control algorithm inwhich a supervisory fuzzy controller governs a sublevelfuzzy controller by altering its input normalization factorsaccording to the current level of groundmotionThe sublevelfuzzy logic controller is designed to determine the commandvoltage of piezoelectric friction damper according to thevelocity and displacement of base isolation Piezoelectricfriction damper regulates the damping force according tothe input voltage Genetic algorithm is employed to optimizesupervisory fuzzy controller and preload of piezoelectricfriction damper according to an objective function and thegenerated artificial earthquakes for different ground sitesTheblock diagram of the system for the developed controller isshown in Figure 7
42 Sublevel Fuzzy Controller The sublevel fuzzy controlleris established in order to determine the command voltage ofthe piezoelectric friction damper The isolation displacementand velocity are selected as two input variables and commandvoltage is employed as a single output variable as shown inFigure 8The definitions of themembership function of input
Mathematical Problems in Engineering 7
Ground motion
Damping force
Semiactiveisolated
structure
Piezoelectricfriction damper
Ground velocity
Optimize
Voltage
Structural response
Isolation velocity and displacement
Sublevel fuzzycontroller
Supervisoryfuzzy controller
Optimize
Genetic algorithm
Nd
N
Figure 7 Block diagram of the base-isolated system for the fuzzy controller
minus10 minus05 00 05 100
1PL
PMPSZENSNM
Deg
ree o
f mem
bers
hip
Normalized displacement
NL
00 05 100
1PL
PMPSZENSNM
Deg
ree o
f mem
bers
hip
Normalized velocity
NL
0 200 400 600 800 10000
1VL
LMS
Deg
ree o
f mem
bers
hip
Voltage (V)
ZE
minus10 minus05
Figure 8 Input and output membership functions of sublevel fuzzy control
variables are as follows NL negative large NM negativemedium NS negative small ZE zero PS positive small PMpositive medium and PL positive large The definition ofthe membership function of output variable is as follows ZEzero S small M medium L large and VL very large Themembership functions are employed Gaussian type for inputand output variables The fuzzy control rules are defined inTable 4
In the establishment of fuzzy control rules it followsthe following principles if the isolation displacement andvelocity are in opposite sign then the output voltage becomessmall in order to ensure output small damping force inthe piezoelectric friction damper Contrarily if the isolationdisplacement and velocity have the same sign the outputvoltage becomes large Certainly when the displacement andvelocity are almost zero or small the command voltage is
8 Mathematical Problems in Engineering
Table 4 Fuzzy control rules adopted for sublevel fuzzy control
Velocity ofisolated floor
Displacement of isolated floorNL NM NS ZE PS PM PL
NL VL VL L L M S ZENM VL L L M S ZE SNS L L M S ZE S MZE L M S ZE S M LPS M S ZE S M L LPM S ZE S M L L VLPL ZE S M L L VL VL
minus1minus05
005
1
minus1minus05
005
1
500
1000
VelocityDisplacement
Volta
ge (V
)
Figure 9 Fuzzy control surface for sublevel fuzzy controller
about zero this means that piezoelectric friction damper actsas a passive friction damper The defuzzification of fuzzycontrol adopts the method of centroid to get a crisp outputvalue The control surface and color-filled contour line ofsublevel fuzzy control are depicted in Figure 9
43 Supervisory Fuzzy Logic Controller In the fuzzy logiccontrol normalization factors need to satisfy a certain objec-tive The oversize normalization factors can enlarge the basedisplacement effectively Contrarily too small normalizationfactors can result in large control force that amplifies theaccelerations of base-isolated structure Thus a supervisoryfuzzy logic control is proposed to adjust its normalizationfactors in real-time As discussed earlier near-fault earth-quakes usually have long duration pulses with peak velocitiesThus the supervisory fuzzy control employs ground velocityas single input variable to identify the characteristics ofthe ground motion The normalization factors of sublevelfuzzy control are selected as two output variables HereGaussian membership functions are used for input andoutput variables as shown in
120583gauss = exp[minus(119909 minus 119888)2
21205902] (7)
where 119888 and 120590 are the constant values that define the shape ofthe Gauss functions respectively
The rules of the supervisory fuzzy controller are definedby the following form
Rule119894 IF 119883 is 119860119894 then 1198841is 1198621198941 1198842is 1198621198942
119894 = 1 2 119872
(8)
where119872 is the number of fuzzy control rules 119883 is the inputvariable 119884
1and 119884
2are the output variables 119860119894 119862119894
1 and 119862119894
2
are the linguistic values characterized by input and outputmembership functions respectively One fuzzy control ruleis described by three Gaussian membership functions andeach membership function can be defined by two parameters(119888 and 120590) Therefore a total of five fuzzy control rules canbe optimized by encoding these two parameters into thegene using genetic algorithm Consequently a total of 30parameters are encoded into the chromosome to define theinference system of supervisory fuzzy controller as shown inFigure 10
Similar to normalization factors the preload of thepiezoelectric friction dampers has a great influence on thedamping effect Thus it is essential to establish an effectivesupervisory fuzzy logic controller and a suitable preloadof piezoelectric friction damper Generally for the seismicprotection of a base-isolated structure there is a trade-off between the isolation displacement and superstructureacceleration The main control objective is to depress theisolation displacementwithout excessively increasing acceler-ation response of the superstructure In this section a geneticalgorithm is employed to seek out an optimal solution forthe control of the base-isolated structure The flow chart ofgenetic algorithm is shown in Figure 11
Genetic algorithm is a computational model for thesimulation of Darwin natural genetic selection and biologicalevolution Different from the traditional search algorithmgenetic algorithm begins to search a group of optimal solu-tions from an initial random population by mutation andrecombination Each individual which consists of a set ofbinary strings is a solution to the objective problem Afterinitialization genetic algorithm uses a sort method to rankindividuals It compares each solution with other solutionsin the population to find whether it is dominated Duringthe process of creating a new generation it selects a suitableindividual according to the size of the fitness value Afterseveral generations the individual value gradually convergesto the best chromosome which is the optimal solution
The objective fitness function employed in this study isshown as follows
119869 = 06 times119910119887max
119910119887max
+ 04 timesradicsum119899
119894=1(119886119894max119886119894max)
2
119899 (9)
where 119910119887max and 119910119887max denote the peak base displacements
for the fuzzy control and uncontrolled cases respectively119886119894max and 119886119894max represent the peak superstructure accelera-tion for the fuzzy control and uncontrolled case respectively
The objective of genetic algorithm is tomake the objectivefitness function reach its minimum value by selecting oneset of parameters of supervisory fuzzy control and preload
Figure 10 Encoding structure for genetic algorithm
of piezoelectric friction damper The initial population sizegenetic algebra and crossover probability are set to 20 50and 08 respectively Through inputting the artificial earth-quakes which are characterized by near-fault earthquakesfor different ground sites the supervisory fuzzy control andpreload of piezoelectric friction dampers can be optimizedThe fuzzy control surfaces of optimized supervisory fuzzycontrol are shown in Figure 12
5 Linear Quadratic Gaussian Controller
LQG (Linear Quadratic Gaussian) method is based onKalman filter technique which has become a widely usedcontrol algorithm For comparison purpose LQG is adoptedto regulate the contact normal force of piezoelectric frictiondamper in the study The optimal controller takes groundacceleration as white noise and considers the velocity anddisplacement of base isolation as feedback signals Thecontrol performance index is defined as follows [22]
119869 = lim120591rarr+infin
1
120591
sdot 119864 int
120591
0
[Z (119905)119879QZ (119905) + U (119905)119879RU (119905)] 119889 (119905) (10)
where Q2119899times2119899
and R1times1
are semi-positive definite matrix andpositive definite matrix respectivelyThe control force can beobtained as follows
U (119905) = minusGZ (119905) (11)
G = Rminus1B119879P (12)
where P can be computed by the solution of the Riccatiequation as follows
minusPA minus A119879P + PBRminus1B119879P minusQ = 0 (13)
The control force obtained from the above equation isactive control force which could not be always achieved bypiezoelectric friction damper It is realized that the directionof active control force is opposite to the slipping direction ofpiezoelectric friction damper Therefore the desired controlforce119906
119889(119905) can be achieved according to the following criteria
Whether or not to meet thecondition of convergence
Figure 11 Flow chart of genetic algorithm
where 119906active is the control force obtained from LQG con-troller
119887is the velocity of base isolator119891max and119891min are the
maximum and minimum friction forces of the piezoelectricfriction damper respectively
6 Numerical Simulations
61 Model of the Base-Isolated Structure A five-story base-isolated building which is proposed by He et al is employedto evaluate the performance of developed fuzzy controllers[18] The fundamental period of the five-story building is03 s For the given isolation parameters the fundamentalperiod of the base-isolated building becomes 25 sThereforean isolation ratio 120575 equal to 83 (=2503) is obtainedThe model of the base-isolated structure with piezoelectricfriction damper is shown in Figure 13 The parameters of thebase-isolated structure are shown in Table 5
62 Performance Evaluation Index In order to evaluate theperformance of base-isolated structure for different controlalgorithms a total of nine performance indexes are employedin this study [23] as shown in Table 6
The performance indexes J1through J
5denote the struc-
ture responses for the controlled building normalized byuncontrolled structure respectively The performance indexJ6evaluates the peak control force normalized by the peak
base shear for controlled structure The performance indexesJ7and J8represent RMS (Root Mean Square) base displace-
ments and RMS floor accelerations respectively J9computes
the energy dissipated by friction dampers normalized by theearthquake input energy to the controlled structure
63 Simulation Results and Analysis A total of nine seis-mic excitations that contain six real ground motions andthree artificial earthquakes are selected to evaluate the per-formance of the optimized fuzzy logic controller In thisstudy the time histories of strong earthquake which rangefrom 20 s to 70 s are selected for numerical simulation andanalysis
The numerical results for various earthquakes are listedin Table 7 In the table the Genetic Algorithm HierarchicFuzzy Logic Control is named as GHFLC Moreover forcomparison purpose the results for an optimal controller andpassive operation of friction damper are also listed in thetable Numbers in bold font indicate the best results amongall control cases
Base displacement is an important index to evaluatethe effectiveness for different controllers For a base-isolatedstructure the reduction of base displacement is a primarypurpose to prevent permanent damage for isolation bearingsor adjacent buildings Although passive operation of frictiondampers can successfully reduce the performance indexassociated with the peak and RMS base displacements (J
3and
J7) it causes significant amplification in peak and RMS floor
accelerations (J5and J
8) for most cases due to the passive
control For example as compared to the uncontrolledstructure for TCU052 TCU053 and TCU054 earthquakespassive control leads to 6 45 and 42 amplification inpeak floor acceleration respectively However the proposedfuzzy controller can successfully improve the base-isolatedstructure acceleration at the cost of slight deterioration in theperformance indices J
3and J7on comparison with passive
control For example for TCU052 TCU053 and TCU054earthquakes GHFLC results in 15 13 and 16 decrease inpeak floor accelerations respectively As compared to passivecontrol there are 9 3 and 7 increase in peak basedisplacements
The time histories of friction force and force-displacement curves of friction dampers for differentcontrollers subjected to TCU052 earthquake are shown inFigure 14 From the figures it can be seen that the passivecontrol outputs lager damper force than GHFLC Becausethe supervisory fuzzy control can alter input normalizationfactors of sublevel FLC according to the current level ofground motion there are some serrations presented at theedge of the hysteretic curve of piezoelectric friction damper
The comparison of the performance indexes J3 J7 J5and
J8under different control cases is shown in Figures 15 and
16 respectively From these figures it can be seen that thefuzzy controller is more effective than passive and optimal
Mathematical Problems in Engineering 11O
utpu
t
009
055
026
000033
000094000
Input ground velocity (ms)
Nd
N
(a) Hard soilO
utpu
t
Input ground velocity (ms)
071
042
000
008000
037
103000
Nd
N
(b) Medium soil
Out
put
Input ground velocity (ms)
107
053
000045
011000
117000
Nd
N
(c) Soft soil
Figure 12 Control surface for optimized supervisory fuzzy control
PFD
Fixed reference
LRB
Figure 13 Model of the base-isolated structure
12 Mathematical Problems in Engineering
Table 6 Performance index
Peak base shear Peak interstory drift RMS base displacement
controller in simultaneously depressing the superstructureacceleration and base displacement For example the appli-cation of developed fuzzy controller leads to an average of112 decrease in peak floor acceleration and an average ofonly 36 increase in peak base displacement as compared topassive control Particularly optimal controller produces anaverage of only 41 reduction in peak floor acceleration and
leads to 79 increase in peak base displacement as comparedto passive control Therefore the improved fuzzy controlmethod shows better performance than passive and optimalcontrol
In order to further evaluate the performance of differentcontrollers the energy time histories for different controllersare compared with each other For a base-isolated structure
Mathematical Problems in Engineering 13
20 30 40 50 60 70minus20
minus10
00
10
20Fr
ictio
n fo
rce (
kN)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(a) Passive control
20 30 40 50 60 70minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(b) GHFLC method
Figure 14 Time histories of friction force and force-displacement diagram against TCU052 earthquake
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation case
Passive OptimalGHFLC
1 2 3 4 5 6 7 8 903
04
05
06
07
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 15 Comparisons on the performance indexes J3and J7for different control cases
14 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
Excitation case
Passive
GHFLC Optimal
J 8J 5
Figure 16 Comparison of the performance indexes J5and J8for different control cases
with piezoelectric friction dampers installed on the isolationthe energy equations are defined as follows
where 119864119870 119864120585 119864119878 119864119867 and 119864
119868denote the absolute kinetic
energy damping energy elastic strain energy energy dis-sipated by piezoelectric friction dampers and total inputenergy respectively The energy time histories for differentcontrollers against TCU052Chi-Chi earthquake are shown inFigure 17 It can be seen from the figures that the piezoelectricfriction dampers dissipate most of the input energy fordifferent control cases subjected to TCU052 earthquake
In order to compare different effects under near-faultground motions recorded for different sites the average ofinput energy and structure responses subjected to near-faultearthquakes are given in Table 8
As shown in Table 8 the near-fault earthquakes forsoft sites are more destructive than hard sites For instancecompared to hard sites the input energy and the base dis-placement of RMS of the base-isolated structure for soft soil
increase by 143 and 256 respectively However GHFLCpossesses favorable performance under different ground sitesand the damping effect has no distinctly direct relationshipwith site category
As discussed in Section 61 the isolation ratio of thesimulation model equals 83 In order to evaluate the effectsof isolation ratio on the damping performance of GHFLC thestiffness value of isolation is adjusted to 1045 and 452 kNmrespectively Then the numerical results for different valuesof isolation ratio (120575 = 4 6) are obtained The performanceindexes J
3and J5for different isolation ratios are shown in
Figures 18 and 19 respectivelyFor base-isolated structure isolation ratio has a signifi-
cant influence on the isolation effect A larger isolation ratiowhich means a minor stiffness value of isolation usuallyleads to conspicuous enlargement of base displacement anddecrease of superstructural responses due to the increaseof fundamental vibration period and vice versa Howeveras shown in Figures 18 and 19 the shock absorption rateof GHFLC has little change when isolation ratio variesdifferently and the proposed fuzzy control shows favorableeffectiveness in the diverse isolation ratios of base-isolatedstructures
7 Conclusions
In this study an optimized fuzzy logic control which isdesigned for Chi-Chi near-fault earthquakes under differentground sites is proposed An elastic design spectrum isproposed to generate near-fault earthquakes for differentground sitesThe characteristic of the design spectrum is thatit has larger periods and peak acceleration than conventionalspectrum Genetic algorithm is employed to optimize thesupervisory fuzzy controller and preload of piezoelectric
Mathematical Problems in Engineering 15
Table 8 Average ofinput energy and structure responses subjected to near-fault earthquakes
Site classification Input energy (kNsdotm) Base shear (kN) Base displacement ofRMS (m)
Figure 17 Energy time histories subjected to Chi-Chi TCU052 earthquake
friction dampers according to three artificial earthquakesthat are characterized by Chi-Chi earthquakes Passive andoptimal controllers are also compared with the performanceof the developed fuzzy controller The simulation resultsreveal that the developed semiactive fuzzy controller hasbetter performance than traditional passive and optimal con-troller in simultaneously reducing the base displacement and
floor acceleration under near-fault earthquakes for differentground sites
Conflict of Interests
The authors declare no conflict of interests regarding thepublication of this paper
16 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation case
Passive
GHFLC Optimal
J 3 J 5Figure 18 Comparisons on the performance indexes J
3and J5for different control cases (120575 = 4)
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 19 Comparisons on the performance indexes J3and J5for different control cases (120575 = 6)
Acknowledgments
This research was supported by National Natural ScienceFoundation of China under Grant no 51308487 no 41402261and no 51408526 Hebei Provincial Natural Science Founda-tion ofChina underGrant no E2014203055 and the ExcellentYouth Foundation of Hebei Educational Committee underGrant no YQ2013015 The support for this research is greatlyappreciated
References
[1] C Alhan and H Gavin ldquoA parametric study of linear and non-linear passively damped seismic isolation systems for buildingsrdquoEngineering Structures vol 26 no 4 pp 485ndash497 2004
[2] R S Jangid and J M Kelly ldquoBase isolation for near-faultmotionsrdquoEarthquake Engineering and Structural Dynamics vol30 no 5 pp 691ndash707 2001
[3] J Shen M-H Tsai K-C Chang and G C Lee ldquoPerformanceof a seismically isolated bridge under near-fault earthquake
[4] F Mazza A Vulcano and M Mazza ldquoNonlinear dynamicresponse of RC buildings with different base Isolation systemssubjected to horizontal and vertical components of near-faultground motionsrdquo Open Construction and Building TechnologyJournal vol 6 pp 373ndash383 2012
[5] F Mazza and A Vulcano ldquoEffects of near-fault ground motionson the nonlinear dynamic response of base-isolated rc framedbuildingsrdquo Earthquake Engineering and Structural Dynamicsvol 41 no 2 pp 211ndash232 2012
[6] O E Ozbulut and S Hurlebaus ldquoFuzzy control of piezoelectricfriction dampers for seismic protection of smart base isolatedbuildingsrdquo Bulletin of Earthquake Engineering vol 8 no 6 pp1435ndash1455 2010
[7] O E Ozbulut M Bitaraf and S Hurlebaus ldquoAdaptive controlof base-isolated structures against near-field earthquakes usingvariable friction dampersrdquo Engineering Structures vol 33 no12 pp 3143ndash3154 2011
[8] J M Kelly ldquoThe role of damping in seismic isolationrdquo Earth-quake Engineering and Structural Dynamics vol 28 no 1 pp3ndash20 1999
[9] F Mazza and A Vulcano ldquoNonlinear response of RC framedbuildings with isolation and supplemental damping at the basesubjected to near-fault earthquakesrdquo Journal of EarthquakeEngineering vol 13 no 5 pp 690ndash715 2009
[10] M Bitaraf and S Hurlebaus ldquoSemi-active adaptive control ofseismically excited 20-story nonlinear buildingrdquo EngineeringStructures vol 56 no 11 pp 2107ndash2118 2013
[11] D Das T K Datta and A Madan ldquoSemiactive fuzzy controlof the seismic response of building frames with MR dampersrdquoEarthquake Engineering and Structural Dynamics vol 41 no 1pp 99ndash118 2012
[12] A-P Wang and C-D Lee ldquoFuzzy sliding mode control for abuilding structure based on genetic algorithmsrdquo EarthquakeEngineering and Structural Dynamics vol 31 no 4 pp 881ndash8952002
[13] D G Reigles and M D Symans ldquoSupervisory fuzzy controlof a base-isolated benchmark building utilizing a neuro-fuzzymodel of controllable fluid viscous dampersrdquo Structural Controland Health Monitoring vol 13 no 2-3 pp 724ndash747 2006
[14] H-S Kim and P N Roschke ldquoGA-fuzzy control of smartbase isolated benchmark building using supervisory controltechniquerdquo Advances in Engineering Software vol 38 no 7 pp453ndash465 2007
[15] D Yang and Y Zhao ldquoEffects of rupture forward directivity andfling step of near-fault groundmotions on seismic performanceof base-isolated building structurerdquo Acta Seismologica Sinicavol 32 no 5 pp 579ndash587 2010
[16] Y E-A Mohamedzein J A Abdalla and A Abdelwahab ldquoSiteresponse and earthquake design spectra for central KhartoumSudanrdquoBulletin of Earthquake Engineering vol 4 no 3 pp 277ndash293 2006
[17] D Zhao and H Li ldquoShaking table tests and analyses of semi-active fuzzy control for structural seismic reduction with apiezoelectric variable-friction damperrdquo Smart Materials andStructures vol 19 no 10 Article ID 105031 2010
[18] W L He A K Agrawal and J N Yang ldquoNovel semiactivefriction controller for linear structures against earthquakesrdquoJournal of Structural Engineering vol 129 no 7 pp 941ndash9502003
[19] J N Yang and A K Agrawal ldquoSemi-active hybrid controlsystems for nonlinear buildings against near-field earthquakesrdquoEngineering Structures vol 24 no 3 pp 271ndash280 2002
[20] O E Ozbulut and S Hurlebaus ldquoOptimal design of supere-lastic-friction base isolators for seismic protection of highwaybridges against near-field earthquakesrdquo Earthquake Engineeringand Structural Dynamics vol 40 no 3 pp 273ndash291 2011
[21] D A Shook P N Roschke and O E Ozbulut ldquoSuperelasticsemi-active damping of a base-isolated structurerdquo StructuralControl and HealthMonitoring vol 15 no 5 pp 746ndash768 2008
[22] K D PhamG JinM K Sain B F Spencer Jr and S R LibertyldquoGeneralized linear quadratic Gaussian techniques for the windbenchmark problemrdquo Journal of Engineering Mechanics vol130 no 4 pp 466ndash470 2004
[23] S Nagarajaiah and S Narasimhan ldquoSmart base-isolated bench-mark building Part II Phase I sample controllers for linearisolation systemsrdquo Structural Control and Health Monitoringvol 13 no 2-3 pp 605ndash625 2006
the time history of the generated artificial earthquakes for softsoil is distinct with the other Particularly the peak velocityreaches 09ms which is significantly greater than the other
3 Model of Base-Isolated Structure andPiezoelectric Friction Damper
31 Equation of Motion for Base-Isolated Structure Consideran n-degree of freedom base-isolated structure with a piezo-electric friction damper at the isolation floor the dynamicequation of the base-isolated system is given by
where M C and K represent 119899 times 119899 mass damping andstiffness matrices respectively X(119905) X(119905) and X(119905) are theacceleration velocity and displacement vectors respectivelyU(119905) is the control force generated by the piezoelectric frictiondamper and
119892(119905) is the earthquake acceleration
Rewriting (2) in state-space form gives
Z (119905) = AZ (119905) + BU (119905) + E119892(119905) (3)
where
Z (119905) = [X (119905)X (119905)
]
E = [0119899times1
Mminus1E119904
]
B = [0119899times1
Mminus1B119904
]
A = [0119899times119899
I119899times119899
minusMminus1K minusMminus1C]
(4)
32 Model of Piezoelectric Friction Damper Piezoelectricfriction damper is a novel semiactive control device whichutilizes piezoelectric stacks to regulate the damping forceto provide a satisfying level of friction force Recently theauthors also proposed a piezoelectric friction damper andinvestigated their performances theoretically and experimen-tally [17]
During the movement of the base-isolated structure afriction damper has two possible motion states sticking andslipping phases [18 19] The friction force of the piezoelectricfriction damper is given as [20]
minus120583119873 (119905) le 119891 (119905) le 120583119873 (119905) = 0
(5)
where 119873(119905) is the total contact force 119873pre represents thepreload of the piezoelectric friction damper 119862pz is thepiezoelectric coefficient of the piezoelectric actuator 119881(119905)is the input voltage of piezoelectric stack actuator 120583 is the
Table 3 Parameters of piezoelectric friction damper
friction coefficient of the damper sgn(sdot) represents the signfunction related to the slip rate of the damper and 119891(119905)denotes damping force of piezoelectric friction damper
However the static state of the piezoelectric frictiondamper is complex to be estimated Shook et al [21] proposedan approximate calculation formula for the sticking frictionforce as given in the following
119891119904= minus120583119873 (119905) sgn ()
when 119891119904=1003816100381610038161003816119891119894 + 119891119903
where 119891119894is the inertial force applied on the mass 119891
119903is the
restoring force provided by the isolation bearing 119898119894is the
mass of the superstructure 119898119887and 119896
119887are the mass and
stiffness of base isolator and 119909119887is the displacement of base
isolatorThe parameters of piezoelectric friction damper are listed
in Table 3 And the preload of the piezoelectric frictiondamper can be optimized by genetic algorithm
4 GA-Based Hierarchic Fuzzy ControlAlgorithm
41 Framework of the Developed Fuzzy Logic Controller Thecontroller adopts a hierarchic fuzzy control algorithm inwhich a supervisory fuzzy controller governs a sublevelfuzzy controller by altering its input normalization factorsaccording to the current level of groundmotionThe sublevelfuzzy logic controller is designed to determine the commandvoltage of piezoelectric friction damper according to thevelocity and displacement of base isolation Piezoelectricfriction damper regulates the damping force according tothe input voltage Genetic algorithm is employed to optimizesupervisory fuzzy controller and preload of piezoelectricfriction damper according to an objective function and thegenerated artificial earthquakes for different ground sitesTheblock diagram of the system for the developed controller isshown in Figure 7
42 Sublevel Fuzzy Controller The sublevel fuzzy controlleris established in order to determine the command voltage ofthe piezoelectric friction damper The isolation displacementand velocity are selected as two input variables and commandvoltage is employed as a single output variable as shown inFigure 8The definitions of themembership function of input
Mathematical Problems in Engineering 7
Ground motion
Damping force
Semiactiveisolated
structure
Piezoelectricfriction damper
Ground velocity
Optimize
Voltage
Structural response
Isolation velocity and displacement
Sublevel fuzzycontroller
Supervisoryfuzzy controller
Optimize
Genetic algorithm
Nd
N
Figure 7 Block diagram of the base-isolated system for the fuzzy controller
minus10 minus05 00 05 100
1PL
PMPSZENSNM
Deg
ree o
f mem
bers
hip
Normalized displacement
NL
00 05 100
1PL
PMPSZENSNM
Deg
ree o
f mem
bers
hip
Normalized velocity
NL
0 200 400 600 800 10000
1VL
LMS
Deg
ree o
f mem
bers
hip
Voltage (V)
ZE
minus10 minus05
Figure 8 Input and output membership functions of sublevel fuzzy control
variables are as follows NL negative large NM negativemedium NS negative small ZE zero PS positive small PMpositive medium and PL positive large The definition ofthe membership function of output variable is as follows ZEzero S small M medium L large and VL very large Themembership functions are employed Gaussian type for inputand output variables The fuzzy control rules are defined inTable 4
In the establishment of fuzzy control rules it followsthe following principles if the isolation displacement andvelocity are in opposite sign then the output voltage becomessmall in order to ensure output small damping force inthe piezoelectric friction damper Contrarily if the isolationdisplacement and velocity have the same sign the outputvoltage becomes large Certainly when the displacement andvelocity are almost zero or small the command voltage is
8 Mathematical Problems in Engineering
Table 4 Fuzzy control rules adopted for sublevel fuzzy control
Velocity ofisolated floor
Displacement of isolated floorNL NM NS ZE PS PM PL
NL VL VL L L M S ZENM VL L L M S ZE SNS L L M S ZE S MZE L M S ZE S M LPS M S ZE S M L LPM S ZE S M L L VLPL ZE S M L L VL VL
minus1minus05
005
1
minus1minus05
005
1
500
1000
VelocityDisplacement
Volta
ge (V
)
Figure 9 Fuzzy control surface for sublevel fuzzy controller
about zero this means that piezoelectric friction damper actsas a passive friction damper The defuzzification of fuzzycontrol adopts the method of centroid to get a crisp outputvalue The control surface and color-filled contour line ofsublevel fuzzy control are depicted in Figure 9
43 Supervisory Fuzzy Logic Controller In the fuzzy logiccontrol normalization factors need to satisfy a certain objec-tive The oversize normalization factors can enlarge the basedisplacement effectively Contrarily too small normalizationfactors can result in large control force that amplifies theaccelerations of base-isolated structure Thus a supervisoryfuzzy logic control is proposed to adjust its normalizationfactors in real-time As discussed earlier near-fault earth-quakes usually have long duration pulses with peak velocitiesThus the supervisory fuzzy control employs ground velocityas single input variable to identify the characteristics ofthe ground motion The normalization factors of sublevelfuzzy control are selected as two output variables HereGaussian membership functions are used for input andoutput variables as shown in
120583gauss = exp[minus(119909 minus 119888)2
21205902] (7)
where 119888 and 120590 are the constant values that define the shape ofthe Gauss functions respectively
The rules of the supervisory fuzzy controller are definedby the following form
Rule119894 IF 119883 is 119860119894 then 1198841is 1198621198941 1198842is 1198621198942
119894 = 1 2 119872
(8)
where119872 is the number of fuzzy control rules 119883 is the inputvariable 119884
1and 119884
2are the output variables 119860119894 119862119894
1 and 119862119894
2
are the linguistic values characterized by input and outputmembership functions respectively One fuzzy control ruleis described by three Gaussian membership functions andeach membership function can be defined by two parameters(119888 and 120590) Therefore a total of five fuzzy control rules canbe optimized by encoding these two parameters into thegene using genetic algorithm Consequently a total of 30parameters are encoded into the chromosome to define theinference system of supervisory fuzzy controller as shown inFigure 10
Similar to normalization factors the preload of thepiezoelectric friction dampers has a great influence on thedamping effect Thus it is essential to establish an effectivesupervisory fuzzy logic controller and a suitable preloadof piezoelectric friction damper Generally for the seismicprotection of a base-isolated structure there is a trade-off between the isolation displacement and superstructureacceleration The main control objective is to depress theisolation displacementwithout excessively increasing acceler-ation response of the superstructure In this section a geneticalgorithm is employed to seek out an optimal solution forthe control of the base-isolated structure The flow chart ofgenetic algorithm is shown in Figure 11
Genetic algorithm is a computational model for thesimulation of Darwin natural genetic selection and biologicalevolution Different from the traditional search algorithmgenetic algorithm begins to search a group of optimal solu-tions from an initial random population by mutation andrecombination Each individual which consists of a set ofbinary strings is a solution to the objective problem Afterinitialization genetic algorithm uses a sort method to rankindividuals It compares each solution with other solutionsin the population to find whether it is dominated Duringthe process of creating a new generation it selects a suitableindividual according to the size of the fitness value Afterseveral generations the individual value gradually convergesto the best chromosome which is the optimal solution
The objective fitness function employed in this study isshown as follows
119869 = 06 times119910119887max
119910119887max
+ 04 timesradicsum119899
119894=1(119886119894max119886119894max)
2
119899 (9)
where 119910119887max and 119910119887max denote the peak base displacements
for the fuzzy control and uncontrolled cases respectively119886119894max and 119886119894max represent the peak superstructure accelera-tion for the fuzzy control and uncontrolled case respectively
The objective of genetic algorithm is tomake the objectivefitness function reach its minimum value by selecting oneset of parameters of supervisory fuzzy control and preload
Figure 10 Encoding structure for genetic algorithm
of piezoelectric friction damper The initial population sizegenetic algebra and crossover probability are set to 20 50and 08 respectively Through inputting the artificial earth-quakes which are characterized by near-fault earthquakesfor different ground sites the supervisory fuzzy control andpreload of piezoelectric friction dampers can be optimizedThe fuzzy control surfaces of optimized supervisory fuzzycontrol are shown in Figure 12
5 Linear Quadratic Gaussian Controller
LQG (Linear Quadratic Gaussian) method is based onKalman filter technique which has become a widely usedcontrol algorithm For comparison purpose LQG is adoptedto regulate the contact normal force of piezoelectric frictiondamper in the study The optimal controller takes groundacceleration as white noise and considers the velocity anddisplacement of base isolation as feedback signals Thecontrol performance index is defined as follows [22]
119869 = lim120591rarr+infin
1
120591
sdot 119864 int
120591
0
[Z (119905)119879QZ (119905) + U (119905)119879RU (119905)] 119889 (119905) (10)
where Q2119899times2119899
and R1times1
are semi-positive definite matrix andpositive definite matrix respectivelyThe control force can beobtained as follows
U (119905) = minusGZ (119905) (11)
G = Rminus1B119879P (12)
where P can be computed by the solution of the Riccatiequation as follows
minusPA minus A119879P + PBRminus1B119879P minusQ = 0 (13)
The control force obtained from the above equation isactive control force which could not be always achieved bypiezoelectric friction damper It is realized that the directionof active control force is opposite to the slipping direction ofpiezoelectric friction damper Therefore the desired controlforce119906
119889(119905) can be achieved according to the following criteria
Whether or not to meet thecondition of convergence
Figure 11 Flow chart of genetic algorithm
where 119906active is the control force obtained from LQG con-troller
119887is the velocity of base isolator119891max and119891min are the
maximum and minimum friction forces of the piezoelectricfriction damper respectively
6 Numerical Simulations
61 Model of the Base-Isolated Structure A five-story base-isolated building which is proposed by He et al is employedto evaluate the performance of developed fuzzy controllers[18] The fundamental period of the five-story building is03 s For the given isolation parameters the fundamentalperiod of the base-isolated building becomes 25 sThereforean isolation ratio 120575 equal to 83 (=2503) is obtainedThe model of the base-isolated structure with piezoelectricfriction damper is shown in Figure 13 The parameters of thebase-isolated structure are shown in Table 5
62 Performance Evaluation Index In order to evaluate theperformance of base-isolated structure for different controlalgorithms a total of nine performance indexes are employedin this study [23] as shown in Table 6
The performance indexes J1through J
5denote the struc-
ture responses for the controlled building normalized byuncontrolled structure respectively The performance indexJ6evaluates the peak control force normalized by the peak
base shear for controlled structure The performance indexesJ7and J8represent RMS (Root Mean Square) base displace-
ments and RMS floor accelerations respectively J9computes
the energy dissipated by friction dampers normalized by theearthquake input energy to the controlled structure
63 Simulation Results and Analysis A total of nine seis-mic excitations that contain six real ground motions andthree artificial earthquakes are selected to evaluate the per-formance of the optimized fuzzy logic controller In thisstudy the time histories of strong earthquake which rangefrom 20 s to 70 s are selected for numerical simulation andanalysis
The numerical results for various earthquakes are listedin Table 7 In the table the Genetic Algorithm HierarchicFuzzy Logic Control is named as GHFLC Moreover forcomparison purpose the results for an optimal controller andpassive operation of friction damper are also listed in thetable Numbers in bold font indicate the best results amongall control cases
Base displacement is an important index to evaluatethe effectiveness for different controllers For a base-isolatedstructure the reduction of base displacement is a primarypurpose to prevent permanent damage for isolation bearingsor adjacent buildings Although passive operation of frictiondampers can successfully reduce the performance indexassociated with the peak and RMS base displacements (J
3and
J7) it causes significant amplification in peak and RMS floor
accelerations (J5and J
8) for most cases due to the passive
control For example as compared to the uncontrolledstructure for TCU052 TCU053 and TCU054 earthquakespassive control leads to 6 45 and 42 amplification inpeak floor acceleration respectively However the proposedfuzzy controller can successfully improve the base-isolatedstructure acceleration at the cost of slight deterioration in theperformance indices J
3and J7on comparison with passive
control For example for TCU052 TCU053 and TCU054earthquakes GHFLC results in 15 13 and 16 decrease inpeak floor accelerations respectively As compared to passivecontrol there are 9 3 and 7 increase in peak basedisplacements
The time histories of friction force and force-displacement curves of friction dampers for differentcontrollers subjected to TCU052 earthquake are shown inFigure 14 From the figures it can be seen that the passivecontrol outputs lager damper force than GHFLC Becausethe supervisory fuzzy control can alter input normalizationfactors of sublevel FLC according to the current level ofground motion there are some serrations presented at theedge of the hysteretic curve of piezoelectric friction damper
The comparison of the performance indexes J3 J7 J5and
J8under different control cases is shown in Figures 15 and
16 respectively From these figures it can be seen that thefuzzy controller is more effective than passive and optimal
Mathematical Problems in Engineering 11O
utpu
t
009
055
026
000033
000094000
Input ground velocity (ms)
Nd
N
(a) Hard soilO
utpu
t
Input ground velocity (ms)
071
042
000
008000
037
103000
Nd
N
(b) Medium soil
Out
put
Input ground velocity (ms)
107
053
000045
011000
117000
Nd
N
(c) Soft soil
Figure 12 Control surface for optimized supervisory fuzzy control
PFD
Fixed reference
LRB
Figure 13 Model of the base-isolated structure
12 Mathematical Problems in Engineering
Table 6 Performance index
Peak base shear Peak interstory drift RMS base displacement
controller in simultaneously depressing the superstructureacceleration and base displacement For example the appli-cation of developed fuzzy controller leads to an average of112 decrease in peak floor acceleration and an average ofonly 36 increase in peak base displacement as compared topassive control Particularly optimal controller produces anaverage of only 41 reduction in peak floor acceleration and
leads to 79 increase in peak base displacement as comparedto passive control Therefore the improved fuzzy controlmethod shows better performance than passive and optimalcontrol
In order to further evaluate the performance of differentcontrollers the energy time histories for different controllersare compared with each other For a base-isolated structure
Mathematical Problems in Engineering 13
20 30 40 50 60 70minus20
minus10
00
10
20Fr
ictio
n fo
rce (
kN)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(a) Passive control
20 30 40 50 60 70minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(b) GHFLC method
Figure 14 Time histories of friction force and force-displacement diagram against TCU052 earthquake
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation case
Passive OptimalGHFLC
1 2 3 4 5 6 7 8 903
04
05
06
07
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 15 Comparisons on the performance indexes J3and J7for different control cases
14 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
Excitation case
Passive
GHFLC Optimal
J 8J 5
Figure 16 Comparison of the performance indexes J5and J8for different control cases
with piezoelectric friction dampers installed on the isolationthe energy equations are defined as follows
where 119864119870 119864120585 119864119878 119864119867 and 119864
119868denote the absolute kinetic
energy damping energy elastic strain energy energy dis-sipated by piezoelectric friction dampers and total inputenergy respectively The energy time histories for differentcontrollers against TCU052Chi-Chi earthquake are shown inFigure 17 It can be seen from the figures that the piezoelectricfriction dampers dissipate most of the input energy fordifferent control cases subjected to TCU052 earthquake
In order to compare different effects under near-faultground motions recorded for different sites the average ofinput energy and structure responses subjected to near-faultearthquakes are given in Table 8
As shown in Table 8 the near-fault earthquakes forsoft sites are more destructive than hard sites For instancecompared to hard sites the input energy and the base dis-placement of RMS of the base-isolated structure for soft soil
increase by 143 and 256 respectively However GHFLCpossesses favorable performance under different ground sitesand the damping effect has no distinctly direct relationshipwith site category
As discussed in Section 61 the isolation ratio of thesimulation model equals 83 In order to evaluate the effectsof isolation ratio on the damping performance of GHFLC thestiffness value of isolation is adjusted to 1045 and 452 kNmrespectively Then the numerical results for different valuesof isolation ratio (120575 = 4 6) are obtained The performanceindexes J
3and J5for different isolation ratios are shown in
Figures 18 and 19 respectivelyFor base-isolated structure isolation ratio has a signifi-
cant influence on the isolation effect A larger isolation ratiowhich means a minor stiffness value of isolation usuallyleads to conspicuous enlargement of base displacement anddecrease of superstructural responses due to the increaseof fundamental vibration period and vice versa Howeveras shown in Figures 18 and 19 the shock absorption rateof GHFLC has little change when isolation ratio variesdifferently and the proposed fuzzy control shows favorableeffectiveness in the diverse isolation ratios of base-isolatedstructures
7 Conclusions
In this study an optimized fuzzy logic control which isdesigned for Chi-Chi near-fault earthquakes under differentground sites is proposed An elastic design spectrum isproposed to generate near-fault earthquakes for differentground sitesThe characteristic of the design spectrum is thatit has larger periods and peak acceleration than conventionalspectrum Genetic algorithm is employed to optimize thesupervisory fuzzy controller and preload of piezoelectric
Mathematical Problems in Engineering 15
Table 8 Average ofinput energy and structure responses subjected to near-fault earthquakes
Site classification Input energy (kNsdotm) Base shear (kN) Base displacement ofRMS (m)
Figure 17 Energy time histories subjected to Chi-Chi TCU052 earthquake
friction dampers according to three artificial earthquakesthat are characterized by Chi-Chi earthquakes Passive andoptimal controllers are also compared with the performanceof the developed fuzzy controller The simulation resultsreveal that the developed semiactive fuzzy controller hasbetter performance than traditional passive and optimal con-troller in simultaneously reducing the base displacement and
floor acceleration under near-fault earthquakes for differentground sites
Conflict of Interests
The authors declare no conflict of interests regarding thepublication of this paper
16 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation case
Passive
GHFLC Optimal
J 3 J 5Figure 18 Comparisons on the performance indexes J
3and J5for different control cases (120575 = 4)
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 19 Comparisons on the performance indexes J3and J5for different control cases (120575 = 6)
Acknowledgments
This research was supported by National Natural ScienceFoundation of China under Grant no 51308487 no 41402261and no 51408526 Hebei Provincial Natural Science Founda-tion ofChina underGrant no E2014203055 and the ExcellentYouth Foundation of Hebei Educational Committee underGrant no YQ2013015 The support for this research is greatlyappreciated
References
[1] C Alhan and H Gavin ldquoA parametric study of linear and non-linear passively damped seismic isolation systems for buildingsrdquoEngineering Structures vol 26 no 4 pp 485ndash497 2004
[2] R S Jangid and J M Kelly ldquoBase isolation for near-faultmotionsrdquoEarthquake Engineering and Structural Dynamics vol30 no 5 pp 691ndash707 2001
[3] J Shen M-H Tsai K-C Chang and G C Lee ldquoPerformanceof a seismically isolated bridge under near-fault earthquake
[4] F Mazza A Vulcano and M Mazza ldquoNonlinear dynamicresponse of RC buildings with different base Isolation systemssubjected to horizontal and vertical components of near-faultground motionsrdquo Open Construction and Building TechnologyJournal vol 6 pp 373ndash383 2012
[5] F Mazza and A Vulcano ldquoEffects of near-fault ground motionson the nonlinear dynamic response of base-isolated rc framedbuildingsrdquo Earthquake Engineering and Structural Dynamicsvol 41 no 2 pp 211ndash232 2012
[6] O E Ozbulut and S Hurlebaus ldquoFuzzy control of piezoelectricfriction dampers for seismic protection of smart base isolatedbuildingsrdquo Bulletin of Earthquake Engineering vol 8 no 6 pp1435ndash1455 2010
[7] O E Ozbulut M Bitaraf and S Hurlebaus ldquoAdaptive controlof base-isolated structures against near-field earthquakes usingvariable friction dampersrdquo Engineering Structures vol 33 no12 pp 3143ndash3154 2011
[8] J M Kelly ldquoThe role of damping in seismic isolationrdquo Earth-quake Engineering and Structural Dynamics vol 28 no 1 pp3ndash20 1999
[9] F Mazza and A Vulcano ldquoNonlinear response of RC framedbuildings with isolation and supplemental damping at the basesubjected to near-fault earthquakesrdquo Journal of EarthquakeEngineering vol 13 no 5 pp 690ndash715 2009
[10] M Bitaraf and S Hurlebaus ldquoSemi-active adaptive control ofseismically excited 20-story nonlinear buildingrdquo EngineeringStructures vol 56 no 11 pp 2107ndash2118 2013
[11] D Das T K Datta and A Madan ldquoSemiactive fuzzy controlof the seismic response of building frames with MR dampersrdquoEarthquake Engineering and Structural Dynamics vol 41 no 1pp 99ndash118 2012
[12] A-P Wang and C-D Lee ldquoFuzzy sliding mode control for abuilding structure based on genetic algorithmsrdquo EarthquakeEngineering and Structural Dynamics vol 31 no 4 pp 881ndash8952002
[13] D G Reigles and M D Symans ldquoSupervisory fuzzy controlof a base-isolated benchmark building utilizing a neuro-fuzzymodel of controllable fluid viscous dampersrdquo Structural Controland Health Monitoring vol 13 no 2-3 pp 724ndash747 2006
[14] H-S Kim and P N Roschke ldquoGA-fuzzy control of smartbase isolated benchmark building using supervisory controltechniquerdquo Advances in Engineering Software vol 38 no 7 pp453ndash465 2007
[15] D Yang and Y Zhao ldquoEffects of rupture forward directivity andfling step of near-fault groundmotions on seismic performanceof base-isolated building structurerdquo Acta Seismologica Sinicavol 32 no 5 pp 579ndash587 2010
[16] Y E-A Mohamedzein J A Abdalla and A Abdelwahab ldquoSiteresponse and earthquake design spectra for central KhartoumSudanrdquoBulletin of Earthquake Engineering vol 4 no 3 pp 277ndash293 2006
[17] D Zhao and H Li ldquoShaking table tests and analyses of semi-active fuzzy control for structural seismic reduction with apiezoelectric variable-friction damperrdquo Smart Materials andStructures vol 19 no 10 Article ID 105031 2010
[18] W L He A K Agrawal and J N Yang ldquoNovel semiactivefriction controller for linear structures against earthquakesrdquoJournal of Structural Engineering vol 129 no 7 pp 941ndash9502003
[19] J N Yang and A K Agrawal ldquoSemi-active hybrid controlsystems for nonlinear buildings against near-field earthquakesrdquoEngineering Structures vol 24 no 3 pp 271ndash280 2002
[20] O E Ozbulut and S Hurlebaus ldquoOptimal design of supere-lastic-friction base isolators for seismic protection of highwaybridges against near-field earthquakesrdquo Earthquake Engineeringand Structural Dynamics vol 40 no 3 pp 273ndash291 2011
[21] D A Shook P N Roschke and O E Ozbulut ldquoSuperelasticsemi-active damping of a base-isolated structurerdquo StructuralControl and HealthMonitoring vol 15 no 5 pp 746ndash768 2008
[22] K D PhamG JinM K Sain B F Spencer Jr and S R LibertyldquoGeneralized linear quadratic Gaussian techniques for the windbenchmark problemrdquo Journal of Engineering Mechanics vol130 no 4 pp 466ndash470 2004
[23] S Nagarajaiah and S Narasimhan ldquoSmart base-isolated bench-mark building Part II Phase I sample controllers for linearisolation systemsrdquo Structural Control and Health Monitoringvol 13 no 2-3 pp 605ndash625 2006
Figure 7 Block diagram of the base-isolated system for the fuzzy controller
minus10 minus05 00 05 100
1PL
PMPSZENSNM
Deg
ree o
f mem
bers
hip
Normalized displacement
NL
00 05 100
1PL
PMPSZENSNM
Deg
ree o
f mem
bers
hip
Normalized velocity
NL
0 200 400 600 800 10000
1VL
LMS
Deg
ree o
f mem
bers
hip
Voltage (V)
ZE
minus10 minus05
Figure 8 Input and output membership functions of sublevel fuzzy control
variables are as follows NL negative large NM negativemedium NS negative small ZE zero PS positive small PMpositive medium and PL positive large The definition ofthe membership function of output variable is as follows ZEzero S small M medium L large and VL very large Themembership functions are employed Gaussian type for inputand output variables The fuzzy control rules are defined inTable 4
In the establishment of fuzzy control rules it followsthe following principles if the isolation displacement andvelocity are in opposite sign then the output voltage becomessmall in order to ensure output small damping force inthe piezoelectric friction damper Contrarily if the isolationdisplacement and velocity have the same sign the outputvoltage becomes large Certainly when the displacement andvelocity are almost zero or small the command voltage is
8 Mathematical Problems in Engineering
Table 4 Fuzzy control rules adopted for sublevel fuzzy control
Velocity ofisolated floor
Displacement of isolated floorNL NM NS ZE PS PM PL
NL VL VL L L M S ZENM VL L L M S ZE SNS L L M S ZE S MZE L M S ZE S M LPS M S ZE S M L LPM S ZE S M L L VLPL ZE S M L L VL VL
minus1minus05
005
1
minus1minus05
005
1
500
1000
VelocityDisplacement
Volta
ge (V
)
Figure 9 Fuzzy control surface for sublevel fuzzy controller
about zero this means that piezoelectric friction damper actsas a passive friction damper The defuzzification of fuzzycontrol adopts the method of centroid to get a crisp outputvalue The control surface and color-filled contour line ofsublevel fuzzy control are depicted in Figure 9
43 Supervisory Fuzzy Logic Controller In the fuzzy logiccontrol normalization factors need to satisfy a certain objec-tive The oversize normalization factors can enlarge the basedisplacement effectively Contrarily too small normalizationfactors can result in large control force that amplifies theaccelerations of base-isolated structure Thus a supervisoryfuzzy logic control is proposed to adjust its normalizationfactors in real-time As discussed earlier near-fault earth-quakes usually have long duration pulses with peak velocitiesThus the supervisory fuzzy control employs ground velocityas single input variable to identify the characteristics ofthe ground motion The normalization factors of sublevelfuzzy control are selected as two output variables HereGaussian membership functions are used for input andoutput variables as shown in
120583gauss = exp[minus(119909 minus 119888)2
21205902] (7)
where 119888 and 120590 are the constant values that define the shape ofthe Gauss functions respectively
The rules of the supervisory fuzzy controller are definedby the following form
Rule119894 IF 119883 is 119860119894 then 1198841is 1198621198941 1198842is 1198621198942
119894 = 1 2 119872
(8)
where119872 is the number of fuzzy control rules 119883 is the inputvariable 119884
1and 119884
2are the output variables 119860119894 119862119894
1 and 119862119894
2
are the linguistic values characterized by input and outputmembership functions respectively One fuzzy control ruleis described by three Gaussian membership functions andeach membership function can be defined by two parameters(119888 and 120590) Therefore a total of five fuzzy control rules canbe optimized by encoding these two parameters into thegene using genetic algorithm Consequently a total of 30parameters are encoded into the chromosome to define theinference system of supervisory fuzzy controller as shown inFigure 10
Similar to normalization factors the preload of thepiezoelectric friction dampers has a great influence on thedamping effect Thus it is essential to establish an effectivesupervisory fuzzy logic controller and a suitable preloadof piezoelectric friction damper Generally for the seismicprotection of a base-isolated structure there is a trade-off between the isolation displacement and superstructureacceleration The main control objective is to depress theisolation displacementwithout excessively increasing acceler-ation response of the superstructure In this section a geneticalgorithm is employed to seek out an optimal solution forthe control of the base-isolated structure The flow chart ofgenetic algorithm is shown in Figure 11
Genetic algorithm is a computational model for thesimulation of Darwin natural genetic selection and biologicalevolution Different from the traditional search algorithmgenetic algorithm begins to search a group of optimal solu-tions from an initial random population by mutation andrecombination Each individual which consists of a set ofbinary strings is a solution to the objective problem Afterinitialization genetic algorithm uses a sort method to rankindividuals It compares each solution with other solutionsin the population to find whether it is dominated Duringthe process of creating a new generation it selects a suitableindividual according to the size of the fitness value Afterseveral generations the individual value gradually convergesto the best chromosome which is the optimal solution
The objective fitness function employed in this study isshown as follows
119869 = 06 times119910119887max
119910119887max
+ 04 timesradicsum119899
119894=1(119886119894max119886119894max)
2
119899 (9)
where 119910119887max and 119910119887max denote the peak base displacements
for the fuzzy control and uncontrolled cases respectively119886119894max and 119886119894max represent the peak superstructure accelera-tion for the fuzzy control and uncontrolled case respectively
The objective of genetic algorithm is tomake the objectivefitness function reach its minimum value by selecting oneset of parameters of supervisory fuzzy control and preload
Figure 10 Encoding structure for genetic algorithm
of piezoelectric friction damper The initial population sizegenetic algebra and crossover probability are set to 20 50and 08 respectively Through inputting the artificial earth-quakes which are characterized by near-fault earthquakesfor different ground sites the supervisory fuzzy control andpreload of piezoelectric friction dampers can be optimizedThe fuzzy control surfaces of optimized supervisory fuzzycontrol are shown in Figure 12
5 Linear Quadratic Gaussian Controller
LQG (Linear Quadratic Gaussian) method is based onKalman filter technique which has become a widely usedcontrol algorithm For comparison purpose LQG is adoptedto regulate the contact normal force of piezoelectric frictiondamper in the study The optimal controller takes groundacceleration as white noise and considers the velocity anddisplacement of base isolation as feedback signals Thecontrol performance index is defined as follows [22]
119869 = lim120591rarr+infin
1
120591
sdot 119864 int
120591
0
[Z (119905)119879QZ (119905) + U (119905)119879RU (119905)] 119889 (119905) (10)
where Q2119899times2119899
and R1times1
are semi-positive definite matrix andpositive definite matrix respectivelyThe control force can beobtained as follows
U (119905) = minusGZ (119905) (11)
G = Rminus1B119879P (12)
where P can be computed by the solution of the Riccatiequation as follows
minusPA minus A119879P + PBRminus1B119879P minusQ = 0 (13)
The control force obtained from the above equation isactive control force which could not be always achieved bypiezoelectric friction damper It is realized that the directionof active control force is opposite to the slipping direction ofpiezoelectric friction damper Therefore the desired controlforce119906
119889(119905) can be achieved according to the following criteria
Whether or not to meet thecondition of convergence
Figure 11 Flow chart of genetic algorithm
where 119906active is the control force obtained from LQG con-troller
119887is the velocity of base isolator119891max and119891min are the
maximum and minimum friction forces of the piezoelectricfriction damper respectively
6 Numerical Simulations
61 Model of the Base-Isolated Structure A five-story base-isolated building which is proposed by He et al is employedto evaluate the performance of developed fuzzy controllers[18] The fundamental period of the five-story building is03 s For the given isolation parameters the fundamentalperiod of the base-isolated building becomes 25 sThereforean isolation ratio 120575 equal to 83 (=2503) is obtainedThe model of the base-isolated structure with piezoelectricfriction damper is shown in Figure 13 The parameters of thebase-isolated structure are shown in Table 5
62 Performance Evaluation Index In order to evaluate theperformance of base-isolated structure for different controlalgorithms a total of nine performance indexes are employedin this study [23] as shown in Table 6
The performance indexes J1through J
5denote the struc-
ture responses for the controlled building normalized byuncontrolled structure respectively The performance indexJ6evaluates the peak control force normalized by the peak
base shear for controlled structure The performance indexesJ7and J8represent RMS (Root Mean Square) base displace-
ments and RMS floor accelerations respectively J9computes
the energy dissipated by friction dampers normalized by theearthquake input energy to the controlled structure
63 Simulation Results and Analysis A total of nine seis-mic excitations that contain six real ground motions andthree artificial earthquakes are selected to evaluate the per-formance of the optimized fuzzy logic controller In thisstudy the time histories of strong earthquake which rangefrom 20 s to 70 s are selected for numerical simulation andanalysis
The numerical results for various earthquakes are listedin Table 7 In the table the Genetic Algorithm HierarchicFuzzy Logic Control is named as GHFLC Moreover forcomparison purpose the results for an optimal controller andpassive operation of friction damper are also listed in thetable Numbers in bold font indicate the best results amongall control cases
Base displacement is an important index to evaluatethe effectiveness for different controllers For a base-isolatedstructure the reduction of base displacement is a primarypurpose to prevent permanent damage for isolation bearingsor adjacent buildings Although passive operation of frictiondampers can successfully reduce the performance indexassociated with the peak and RMS base displacements (J
3and
J7) it causes significant amplification in peak and RMS floor
accelerations (J5and J
8) for most cases due to the passive
control For example as compared to the uncontrolledstructure for TCU052 TCU053 and TCU054 earthquakespassive control leads to 6 45 and 42 amplification inpeak floor acceleration respectively However the proposedfuzzy controller can successfully improve the base-isolatedstructure acceleration at the cost of slight deterioration in theperformance indices J
3and J7on comparison with passive
control For example for TCU052 TCU053 and TCU054earthquakes GHFLC results in 15 13 and 16 decrease inpeak floor accelerations respectively As compared to passivecontrol there are 9 3 and 7 increase in peak basedisplacements
The time histories of friction force and force-displacement curves of friction dampers for differentcontrollers subjected to TCU052 earthquake are shown inFigure 14 From the figures it can be seen that the passivecontrol outputs lager damper force than GHFLC Becausethe supervisory fuzzy control can alter input normalizationfactors of sublevel FLC according to the current level ofground motion there are some serrations presented at theedge of the hysteretic curve of piezoelectric friction damper
The comparison of the performance indexes J3 J7 J5and
J8under different control cases is shown in Figures 15 and
16 respectively From these figures it can be seen that thefuzzy controller is more effective than passive and optimal
Mathematical Problems in Engineering 11O
utpu
t
009
055
026
000033
000094000
Input ground velocity (ms)
Nd
N
(a) Hard soilO
utpu
t
Input ground velocity (ms)
071
042
000
008000
037
103000
Nd
N
(b) Medium soil
Out
put
Input ground velocity (ms)
107
053
000045
011000
117000
Nd
N
(c) Soft soil
Figure 12 Control surface for optimized supervisory fuzzy control
PFD
Fixed reference
LRB
Figure 13 Model of the base-isolated structure
12 Mathematical Problems in Engineering
Table 6 Performance index
Peak base shear Peak interstory drift RMS base displacement
controller in simultaneously depressing the superstructureacceleration and base displacement For example the appli-cation of developed fuzzy controller leads to an average of112 decrease in peak floor acceleration and an average ofonly 36 increase in peak base displacement as compared topassive control Particularly optimal controller produces anaverage of only 41 reduction in peak floor acceleration and
leads to 79 increase in peak base displacement as comparedto passive control Therefore the improved fuzzy controlmethod shows better performance than passive and optimalcontrol
In order to further evaluate the performance of differentcontrollers the energy time histories for different controllersare compared with each other For a base-isolated structure
Mathematical Problems in Engineering 13
20 30 40 50 60 70minus20
minus10
00
10
20Fr
ictio
n fo
rce (
kN)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(a) Passive control
20 30 40 50 60 70minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(b) GHFLC method
Figure 14 Time histories of friction force and force-displacement diagram against TCU052 earthquake
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation case
Passive OptimalGHFLC
1 2 3 4 5 6 7 8 903
04
05
06
07
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 15 Comparisons on the performance indexes J3and J7for different control cases
14 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
Excitation case
Passive
GHFLC Optimal
J 8J 5
Figure 16 Comparison of the performance indexes J5and J8for different control cases
with piezoelectric friction dampers installed on the isolationthe energy equations are defined as follows
where 119864119870 119864120585 119864119878 119864119867 and 119864
119868denote the absolute kinetic
energy damping energy elastic strain energy energy dis-sipated by piezoelectric friction dampers and total inputenergy respectively The energy time histories for differentcontrollers against TCU052Chi-Chi earthquake are shown inFigure 17 It can be seen from the figures that the piezoelectricfriction dampers dissipate most of the input energy fordifferent control cases subjected to TCU052 earthquake
In order to compare different effects under near-faultground motions recorded for different sites the average ofinput energy and structure responses subjected to near-faultearthquakes are given in Table 8
As shown in Table 8 the near-fault earthquakes forsoft sites are more destructive than hard sites For instancecompared to hard sites the input energy and the base dis-placement of RMS of the base-isolated structure for soft soil
increase by 143 and 256 respectively However GHFLCpossesses favorable performance under different ground sitesand the damping effect has no distinctly direct relationshipwith site category
As discussed in Section 61 the isolation ratio of thesimulation model equals 83 In order to evaluate the effectsof isolation ratio on the damping performance of GHFLC thestiffness value of isolation is adjusted to 1045 and 452 kNmrespectively Then the numerical results for different valuesof isolation ratio (120575 = 4 6) are obtained The performanceindexes J
3and J5for different isolation ratios are shown in
Figures 18 and 19 respectivelyFor base-isolated structure isolation ratio has a signifi-
cant influence on the isolation effect A larger isolation ratiowhich means a minor stiffness value of isolation usuallyleads to conspicuous enlargement of base displacement anddecrease of superstructural responses due to the increaseof fundamental vibration period and vice versa Howeveras shown in Figures 18 and 19 the shock absorption rateof GHFLC has little change when isolation ratio variesdifferently and the proposed fuzzy control shows favorableeffectiveness in the diverse isolation ratios of base-isolatedstructures
7 Conclusions
In this study an optimized fuzzy logic control which isdesigned for Chi-Chi near-fault earthquakes under differentground sites is proposed An elastic design spectrum isproposed to generate near-fault earthquakes for differentground sitesThe characteristic of the design spectrum is thatit has larger periods and peak acceleration than conventionalspectrum Genetic algorithm is employed to optimize thesupervisory fuzzy controller and preload of piezoelectric
Mathematical Problems in Engineering 15
Table 8 Average ofinput energy and structure responses subjected to near-fault earthquakes
Site classification Input energy (kNsdotm) Base shear (kN) Base displacement ofRMS (m)
Figure 17 Energy time histories subjected to Chi-Chi TCU052 earthquake
friction dampers according to three artificial earthquakesthat are characterized by Chi-Chi earthquakes Passive andoptimal controllers are also compared with the performanceof the developed fuzzy controller The simulation resultsreveal that the developed semiactive fuzzy controller hasbetter performance than traditional passive and optimal con-troller in simultaneously reducing the base displacement and
floor acceleration under near-fault earthquakes for differentground sites
Conflict of Interests
The authors declare no conflict of interests regarding thepublication of this paper
16 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation case
Passive
GHFLC Optimal
J 3 J 5Figure 18 Comparisons on the performance indexes J
3and J5for different control cases (120575 = 4)
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 19 Comparisons on the performance indexes J3and J5for different control cases (120575 = 6)
Acknowledgments
This research was supported by National Natural ScienceFoundation of China under Grant no 51308487 no 41402261and no 51408526 Hebei Provincial Natural Science Founda-tion ofChina underGrant no E2014203055 and the ExcellentYouth Foundation of Hebei Educational Committee underGrant no YQ2013015 The support for this research is greatlyappreciated
References
[1] C Alhan and H Gavin ldquoA parametric study of linear and non-linear passively damped seismic isolation systems for buildingsrdquoEngineering Structures vol 26 no 4 pp 485ndash497 2004
[2] R S Jangid and J M Kelly ldquoBase isolation for near-faultmotionsrdquoEarthquake Engineering and Structural Dynamics vol30 no 5 pp 691ndash707 2001
[3] J Shen M-H Tsai K-C Chang and G C Lee ldquoPerformanceof a seismically isolated bridge under near-fault earthquake
[4] F Mazza A Vulcano and M Mazza ldquoNonlinear dynamicresponse of RC buildings with different base Isolation systemssubjected to horizontal and vertical components of near-faultground motionsrdquo Open Construction and Building TechnologyJournal vol 6 pp 373ndash383 2012
[5] F Mazza and A Vulcano ldquoEffects of near-fault ground motionson the nonlinear dynamic response of base-isolated rc framedbuildingsrdquo Earthquake Engineering and Structural Dynamicsvol 41 no 2 pp 211ndash232 2012
[6] O E Ozbulut and S Hurlebaus ldquoFuzzy control of piezoelectricfriction dampers for seismic protection of smart base isolatedbuildingsrdquo Bulletin of Earthquake Engineering vol 8 no 6 pp1435ndash1455 2010
[7] O E Ozbulut M Bitaraf and S Hurlebaus ldquoAdaptive controlof base-isolated structures against near-field earthquakes usingvariable friction dampersrdquo Engineering Structures vol 33 no12 pp 3143ndash3154 2011
[8] J M Kelly ldquoThe role of damping in seismic isolationrdquo Earth-quake Engineering and Structural Dynamics vol 28 no 1 pp3ndash20 1999
[9] F Mazza and A Vulcano ldquoNonlinear response of RC framedbuildings with isolation and supplemental damping at the basesubjected to near-fault earthquakesrdquo Journal of EarthquakeEngineering vol 13 no 5 pp 690ndash715 2009
[10] M Bitaraf and S Hurlebaus ldquoSemi-active adaptive control ofseismically excited 20-story nonlinear buildingrdquo EngineeringStructures vol 56 no 11 pp 2107ndash2118 2013
[11] D Das T K Datta and A Madan ldquoSemiactive fuzzy controlof the seismic response of building frames with MR dampersrdquoEarthquake Engineering and Structural Dynamics vol 41 no 1pp 99ndash118 2012
[12] A-P Wang and C-D Lee ldquoFuzzy sliding mode control for abuilding structure based on genetic algorithmsrdquo EarthquakeEngineering and Structural Dynamics vol 31 no 4 pp 881ndash8952002
[13] D G Reigles and M D Symans ldquoSupervisory fuzzy controlof a base-isolated benchmark building utilizing a neuro-fuzzymodel of controllable fluid viscous dampersrdquo Structural Controland Health Monitoring vol 13 no 2-3 pp 724ndash747 2006
[14] H-S Kim and P N Roschke ldquoGA-fuzzy control of smartbase isolated benchmark building using supervisory controltechniquerdquo Advances in Engineering Software vol 38 no 7 pp453ndash465 2007
[15] D Yang and Y Zhao ldquoEffects of rupture forward directivity andfling step of near-fault groundmotions on seismic performanceof base-isolated building structurerdquo Acta Seismologica Sinicavol 32 no 5 pp 579ndash587 2010
[16] Y E-A Mohamedzein J A Abdalla and A Abdelwahab ldquoSiteresponse and earthquake design spectra for central KhartoumSudanrdquoBulletin of Earthquake Engineering vol 4 no 3 pp 277ndash293 2006
[17] D Zhao and H Li ldquoShaking table tests and analyses of semi-active fuzzy control for structural seismic reduction with apiezoelectric variable-friction damperrdquo Smart Materials andStructures vol 19 no 10 Article ID 105031 2010
[18] W L He A K Agrawal and J N Yang ldquoNovel semiactivefriction controller for linear structures against earthquakesrdquoJournal of Structural Engineering vol 129 no 7 pp 941ndash9502003
[19] J N Yang and A K Agrawal ldquoSemi-active hybrid controlsystems for nonlinear buildings against near-field earthquakesrdquoEngineering Structures vol 24 no 3 pp 271ndash280 2002
[20] O E Ozbulut and S Hurlebaus ldquoOptimal design of supere-lastic-friction base isolators for seismic protection of highwaybridges against near-field earthquakesrdquo Earthquake Engineeringand Structural Dynamics vol 40 no 3 pp 273ndash291 2011
[21] D A Shook P N Roschke and O E Ozbulut ldquoSuperelasticsemi-active damping of a base-isolated structurerdquo StructuralControl and HealthMonitoring vol 15 no 5 pp 746ndash768 2008
[22] K D PhamG JinM K Sain B F Spencer Jr and S R LibertyldquoGeneralized linear quadratic Gaussian techniques for the windbenchmark problemrdquo Journal of Engineering Mechanics vol130 no 4 pp 466ndash470 2004
[23] S Nagarajaiah and S Narasimhan ldquoSmart base-isolated bench-mark building Part II Phase I sample controllers for linearisolation systemsrdquo Structural Control and Health Monitoringvol 13 no 2-3 pp 605ndash625 2006
Table 4 Fuzzy control rules adopted for sublevel fuzzy control
Velocity ofisolated floor
Displacement of isolated floorNL NM NS ZE PS PM PL
NL VL VL L L M S ZENM VL L L M S ZE SNS L L M S ZE S MZE L M S ZE S M LPS M S ZE S M L LPM S ZE S M L L VLPL ZE S M L L VL VL
minus1minus05
005
1
minus1minus05
005
1
500
1000
VelocityDisplacement
Volta
ge (V
)
Figure 9 Fuzzy control surface for sublevel fuzzy controller
about zero this means that piezoelectric friction damper actsas a passive friction damper The defuzzification of fuzzycontrol adopts the method of centroid to get a crisp outputvalue The control surface and color-filled contour line ofsublevel fuzzy control are depicted in Figure 9
43 Supervisory Fuzzy Logic Controller In the fuzzy logiccontrol normalization factors need to satisfy a certain objec-tive The oversize normalization factors can enlarge the basedisplacement effectively Contrarily too small normalizationfactors can result in large control force that amplifies theaccelerations of base-isolated structure Thus a supervisoryfuzzy logic control is proposed to adjust its normalizationfactors in real-time As discussed earlier near-fault earth-quakes usually have long duration pulses with peak velocitiesThus the supervisory fuzzy control employs ground velocityas single input variable to identify the characteristics ofthe ground motion The normalization factors of sublevelfuzzy control are selected as two output variables HereGaussian membership functions are used for input andoutput variables as shown in
120583gauss = exp[minus(119909 minus 119888)2
21205902] (7)
where 119888 and 120590 are the constant values that define the shape ofthe Gauss functions respectively
The rules of the supervisory fuzzy controller are definedby the following form
Rule119894 IF 119883 is 119860119894 then 1198841is 1198621198941 1198842is 1198621198942
119894 = 1 2 119872
(8)
where119872 is the number of fuzzy control rules 119883 is the inputvariable 119884
1and 119884
2are the output variables 119860119894 119862119894
1 and 119862119894
2
are the linguistic values characterized by input and outputmembership functions respectively One fuzzy control ruleis described by three Gaussian membership functions andeach membership function can be defined by two parameters(119888 and 120590) Therefore a total of five fuzzy control rules canbe optimized by encoding these two parameters into thegene using genetic algorithm Consequently a total of 30parameters are encoded into the chromosome to define theinference system of supervisory fuzzy controller as shown inFigure 10
Similar to normalization factors the preload of thepiezoelectric friction dampers has a great influence on thedamping effect Thus it is essential to establish an effectivesupervisory fuzzy logic controller and a suitable preloadof piezoelectric friction damper Generally for the seismicprotection of a base-isolated structure there is a trade-off between the isolation displacement and superstructureacceleration The main control objective is to depress theisolation displacementwithout excessively increasing acceler-ation response of the superstructure In this section a geneticalgorithm is employed to seek out an optimal solution forthe control of the base-isolated structure The flow chart ofgenetic algorithm is shown in Figure 11
Genetic algorithm is a computational model for thesimulation of Darwin natural genetic selection and biologicalevolution Different from the traditional search algorithmgenetic algorithm begins to search a group of optimal solu-tions from an initial random population by mutation andrecombination Each individual which consists of a set ofbinary strings is a solution to the objective problem Afterinitialization genetic algorithm uses a sort method to rankindividuals It compares each solution with other solutionsin the population to find whether it is dominated Duringthe process of creating a new generation it selects a suitableindividual according to the size of the fitness value Afterseveral generations the individual value gradually convergesto the best chromosome which is the optimal solution
The objective fitness function employed in this study isshown as follows
119869 = 06 times119910119887max
119910119887max
+ 04 timesradicsum119899
119894=1(119886119894max119886119894max)
2
119899 (9)
where 119910119887max and 119910119887max denote the peak base displacements
for the fuzzy control and uncontrolled cases respectively119886119894max and 119886119894max represent the peak superstructure accelera-tion for the fuzzy control and uncontrolled case respectively
The objective of genetic algorithm is tomake the objectivefitness function reach its minimum value by selecting oneset of parameters of supervisory fuzzy control and preload
Figure 10 Encoding structure for genetic algorithm
of piezoelectric friction damper The initial population sizegenetic algebra and crossover probability are set to 20 50and 08 respectively Through inputting the artificial earth-quakes which are characterized by near-fault earthquakesfor different ground sites the supervisory fuzzy control andpreload of piezoelectric friction dampers can be optimizedThe fuzzy control surfaces of optimized supervisory fuzzycontrol are shown in Figure 12
5 Linear Quadratic Gaussian Controller
LQG (Linear Quadratic Gaussian) method is based onKalman filter technique which has become a widely usedcontrol algorithm For comparison purpose LQG is adoptedto regulate the contact normal force of piezoelectric frictiondamper in the study The optimal controller takes groundacceleration as white noise and considers the velocity anddisplacement of base isolation as feedback signals Thecontrol performance index is defined as follows [22]
119869 = lim120591rarr+infin
1
120591
sdot 119864 int
120591
0
[Z (119905)119879QZ (119905) + U (119905)119879RU (119905)] 119889 (119905) (10)
where Q2119899times2119899
and R1times1
are semi-positive definite matrix andpositive definite matrix respectivelyThe control force can beobtained as follows
U (119905) = minusGZ (119905) (11)
G = Rminus1B119879P (12)
where P can be computed by the solution of the Riccatiequation as follows
minusPA minus A119879P + PBRminus1B119879P minusQ = 0 (13)
The control force obtained from the above equation isactive control force which could not be always achieved bypiezoelectric friction damper It is realized that the directionof active control force is opposite to the slipping direction ofpiezoelectric friction damper Therefore the desired controlforce119906
119889(119905) can be achieved according to the following criteria
Whether or not to meet thecondition of convergence
Figure 11 Flow chart of genetic algorithm
where 119906active is the control force obtained from LQG con-troller
119887is the velocity of base isolator119891max and119891min are the
maximum and minimum friction forces of the piezoelectricfriction damper respectively
6 Numerical Simulations
61 Model of the Base-Isolated Structure A five-story base-isolated building which is proposed by He et al is employedto evaluate the performance of developed fuzzy controllers[18] The fundamental period of the five-story building is03 s For the given isolation parameters the fundamentalperiod of the base-isolated building becomes 25 sThereforean isolation ratio 120575 equal to 83 (=2503) is obtainedThe model of the base-isolated structure with piezoelectricfriction damper is shown in Figure 13 The parameters of thebase-isolated structure are shown in Table 5
62 Performance Evaluation Index In order to evaluate theperformance of base-isolated structure for different controlalgorithms a total of nine performance indexes are employedin this study [23] as shown in Table 6
The performance indexes J1through J
5denote the struc-
ture responses for the controlled building normalized byuncontrolled structure respectively The performance indexJ6evaluates the peak control force normalized by the peak
base shear for controlled structure The performance indexesJ7and J8represent RMS (Root Mean Square) base displace-
ments and RMS floor accelerations respectively J9computes
the energy dissipated by friction dampers normalized by theearthquake input energy to the controlled structure
63 Simulation Results and Analysis A total of nine seis-mic excitations that contain six real ground motions andthree artificial earthquakes are selected to evaluate the per-formance of the optimized fuzzy logic controller In thisstudy the time histories of strong earthquake which rangefrom 20 s to 70 s are selected for numerical simulation andanalysis
The numerical results for various earthquakes are listedin Table 7 In the table the Genetic Algorithm HierarchicFuzzy Logic Control is named as GHFLC Moreover forcomparison purpose the results for an optimal controller andpassive operation of friction damper are also listed in thetable Numbers in bold font indicate the best results amongall control cases
Base displacement is an important index to evaluatethe effectiveness for different controllers For a base-isolatedstructure the reduction of base displacement is a primarypurpose to prevent permanent damage for isolation bearingsor adjacent buildings Although passive operation of frictiondampers can successfully reduce the performance indexassociated with the peak and RMS base displacements (J
3and
J7) it causes significant amplification in peak and RMS floor
accelerations (J5and J
8) for most cases due to the passive
control For example as compared to the uncontrolledstructure for TCU052 TCU053 and TCU054 earthquakespassive control leads to 6 45 and 42 amplification inpeak floor acceleration respectively However the proposedfuzzy controller can successfully improve the base-isolatedstructure acceleration at the cost of slight deterioration in theperformance indices J
3and J7on comparison with passive
control For example for TCU052 TCU053 and TCU054earthquakes GHFLC results in 15 13 and 16 decrease inpeak floor accelerations respectively As compared to passivecontrol there are 9 3 and 7 increase in peak basedisplacements
The time histories of friction force and force-displacement curves of friction dampers for differentcontrollers subjected to TCU052 earthquake are shown inFigure 14 From the figures it can be seen that the passivecontrol outputs lager damper force than GHFLC Becausethe supervisory fuzzy control can alter input normalizationfactors of sublevel FLC according to the current level ofground motion there are some serrations presented at theedge of the hysteretic curve of piezoelectric friction damper
The comparison of the performance indexes J3 J7 J5and
J8under different control cases is shown in Figures 15 and
16 respectively From these figures it can be seen that thefuzzy controller is more effective than passive and optimal
Mathematical Problems in Engineering 11O
utpu
t
009
055
026
000033
000094000
Input ground velocity (ms)
Nd
N
(a) Hard soilO
utpu
t
Input ground velocity (ms)
071
042
000
008000
037
103000
Nd
N
(b) Medium soil
Out
put
Input ground velocity (ms)
107
053
000045
011000
117000
Nd
N
(c) Soft soil
Figure 12 Control surface for optimized supervisory fuzzy control
PFD
Fixed reference
LRB
Figure 13 Model of the base-isolated structure
12 Mathematical Problems in Engineering
Table 6 Performance index
Peak base shear Peak interstory drift RMS base displacement
controller in simultaneously depressing the superstructureacceleration and base displacement For example the appli-cation of developed fuzzy controller leads to an average of112 decrease in peak floor acceleration and an average ofonly 36 increase in peak base displacement as compared topassive control Particularly optimal controller produces anaverage of only 41 reduction in peak floor acceleration and
leads to 79 increase in peak base displacement as comparedto passive control Therefore the improved fuzzy controlmethod shows better performance than passive and optimalcontrol
In order to further evaluate the performance of differentcontrollers the energy time histories for different controllersare compared with each other For a base-isolated structure
Mathematical Problems in Engineering 13
20 30 40 50 60 70minus20
minus10
00
10
20Fr
ictio
n fo
rce (
kN)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(a) Passive control
20 30 40 50 60 70minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(b) GHFLC method
Figure 14 Time histories of friction force and force-displacement diagram against TCU052 earthquake
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation case
Passive OptimalGHFLC
1 2 3 4 5 6 7 8 903
04
05
06
07
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 15 Comparisons on the performance indexes J3and J7for different control cases
14 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
Excitation case
Passive
GHFLC Optimal
J 8J 5
Figure 16 Comparison of the performance indexes J5and J8for different control cases
with piezoelectric friction dampers installed on the isolationthe energy equations are defined as follows
where 119864119870 119864120585 119864119878 119864119867 and 119864
119868denote the absolute kinetic
energy damping energy elastic strain energy energy dis-sipated by piezoelectric friction dampers and total inputenergy respectively The energy time histories for differentcontrollers against TCU052Chi-Chi earthquake are shown inFigure 17 It can be seen from the figures that the piezoelectricfriction dampers dissipate most of the input energy fordifferent control cases subjected to TCU052 earthquake
In order to compare different effects under near-faultground motions recorded for different sites the average ofinput energy and structure responses subjected to near-faultearthquakes are given in Table 8
As shown in Table 8 the near-fault earthquakes forsoft sites are more destructive than hard sites For instancecompared to hard sites the input energy and the base dis-placement of RMS of the base-isolated structure for soft soil
increase by 143 and 256 respectively However GHFLCpossesses favorable performance under different ground sitesand the damping effect has no distinctly direct relationshipwith site category
As discussed in Section 61 the isolation ratio of thesimulation model equals 83 In order to evaluate the effectsof isolation ratio on the damping performance of GHFLC thestiffness value of isolation is adjusted to 1045 and 452 kNmrespectively Then the numerical results for different valuesof isolation ratio (120575 = 4 6) are obtained The performanceindexes J
3and J5for different isolation ratios are shown in
Figures 18 and 19 respectivelyFor base-isolated structure isolation ratio has a signifi-
cant influence on the isolation effect A larger isolation ratiowhich means a minor stiffness value of isolation usuallyleads to conspicuous enlargement of base displacement anddecrease of superstructural responses due to the increaseof fundamental vibration period and vice versa Howeveras shown in Figures 18 and 19 the shock absorption rateof GHFLC has little change when isolation ratio variesdifferently and the proposed fuzzy control shows favorableeffectiveness in the diverse isolation ratios of base-isolatedstructures
7 Conclusions
In this study an optimized fuzzy logic control which isdesigned for Chi-Chi near-fault earthquakes under differentground sites is proposed An elastic design spectrum isproposed to generate near-fault earthquakes for differentground sitesThe characteristic of the design spectrum is thatit has larger periods and peak acceleration than conventionalspectrum Genetic algorithm is employed to optimize thesupervisory fuzzy controller and preload of piezoelectric
Mathematical Problems in Engineering 15
Table 8 Average ofinput energy and structure responses subjected to near-fault earthquakes
Site classification Input energy (kNsdotm) Base shear (kN) Base displacement ofRMS (m)
Figure 17 Energy time histories subjected to Chi-Chi TCU052 earthquake
friction dampers according to three artificial earthquakesthat are characterized by Chi-Chi earthquakes Passive andoptimal controllers are also compared with the performanceof the developed fuzzy controller The simulation resultsreveal that the developed semiactive fuzzy controller hasbetter performance than traditional passive and optimal con-troller in simultaneously reducing the base displacement and
floor acceleration under near-fault earthquakes for differentground sites
Conflict of Interests
The authors declare no conflict of interests regarding thepublication of this paper
16 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation case
Passive
GHFLC Optimal
J 3 J 5Figure 18 Comparisons on the performance indexes J
3and J5for different control cases (120575 = 4)
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 19 Comparisons on the performance indexes J3and J5for different control cases (120575 = 6)
Acknowledgments
This research was supported by National Natural ScienceFoundation of China under Grant no 51308487 no 41402261and no 51408526 Hebei Provincial Natural Science Founda-tion ofChina underGrant no E2014203055 and the ExcellentYouth Foundation of Hebei Educational Committee underGrant no YQ2013015 The support for this research is greatlyappreciated
References
[1] C Alhan and H Gavin ldquoA parametric study of linear and non-linear passively damped seismic isolation systems for buildingsrdquoEngineering Structures vol 26 no 4 pp 485ndash497 2004
[2] R S Jangid and J M Kelly ldquoBase isolation for near-faultmotionsrdquoEarthquake Engineering and Structural Dynamics vol30 no 5 pp 691ndash707 2001
[3] J Shen M-H Tsai K-C Chang and G C Lee ldquoPerformanceof a seismically isolated bridge under near-fault earthquake
[4] F Mazza A Vulcano and M Mazza ldquoNonlinear dynamicresponse of RC buildings with different base Isolation systemssubjected to horizontal and vertical components of near-faultground motionsrdquo Open Construction and Building TechnologyJournal vol 6 pp 373ndash383 2012
[5] F Mazza and A Vulcano ldquoEffects of near-fault ground motionson the nonlinear dynamic response of base-isolated rc framedbuildingsrdquo Earthquake Engineering and Structural Dynamicsvol 41 no 2 pp 211ndash232 2012
[6] O E Ozbulut and S Hurlebaus ldquoFuzzy control of piezoelectricfriction dampers for seismic protection of smart base isolatedbuildingsrdquo Bulletin of Earthquake Engineering vol 8 no 6 pp1435ndash1455 2010
[7] O E Ozbulut M Bitaraf and S Hurlebaus ldquoAdaptive controlof base-isolated structures against near-field earthquakes usingvariable friction dampersrdquo Engineering Structures vol 33 no12 pp 3143ndash3154 2011
[8] J M Kelly ldquoThe role of damping in seismic isolationrdquo Earth-quake Engineering and Structural Dynamics vol 28 no 1 pp3ndash20 1999
[9] F Mazza and A Vulcano ldquoNonlinear response of RC framedbuildings with isolation and supplemental damping at the basesubjected to near-fault earthquakesrdquo Journal of EarthquakeEngineering vol 13 no 5 pp 690ndash715 2009
[10] M Bitaraf and S Hurlebaus ldquoSemi-active adaptive control ofseismically excited 20-story nonlinear buildingrdquo EngineeringStructures vol 56 no 11 pp 2107ndash2118 2013
[11] D Das T K Datta and A Madan ldquoSemiactive fuzzy controlof the seismic response of building frames with MR dampersrdquoEarthquake Engineering and Structural Dynamics vol 41 no 1pp 99ndash118 2012
[12] A-P Wang and C-D Lee ldquoFuzzy sliding mode control for abuilding structure based on genetic algorithmsrdquo EarthquakeEngineering and Structural Dynamics vol 31 no 4 pp 881ndash8952002
[13] D G Reigles and M D Symans ldquoSupervisory fuzzy controlof a base-isolated benchmark building utilizing a neuro-fuzzymodel of controllable fluid viscous dampersrdquo Structural Controland Health Monitoring vol 13 no 2-3 pp 724ndash747 2006
[14] H-S Kim and P N Roschke ldquoGA-fuzzy control of smartbase isolated benchmark building using supervisory controltechniquerdquo Advances in Engineering Software vol 38 no 7 pp453ndash465 2007
[15] D Yang and Y Zhao ldquoEffects of rupture forward directivity andfling step of near-fault groundmotions on seismic performanceof base-isolated building structurerdquo Acta Seismologica Sinicavol 32 no 5 pp 579ndash587 2010
[16] Y E-A Mohamedzein J A Abdalla and A Abdelwahab ldquoSiteresponse and earthquake design spectra for central KhartoumSudanrdquoBulletin of Earthquake Engineering vol 4 no 3 pp 277ndash293 2006
[17] D Zhao and H Li ldquoShaking table tests and analyses of semi-active fuzzy control for structural seismic reduction with apiezoelectric variable-friction damperrdquo Smart Materials andStructures vol 19 no 10 Article ID 105031 2010
[18] W L He A K Agrawal and J N Yang ldquoNovel semiactivefriction controller for linear structures against earthquakesrdquoJournal of Structural Engineering vol 129 no 7 pp 941ndash9502003
[19] J N Yang and A K Agrawal ldquoSemi-active hybrid controlsystems for nonlinear buildings against near-field earthquakesrdquoEngineering Structures vol 24 no 3 pp 271ndash280 2002
[20] O E Ozbulut and S Hurlebaus ldquoOptimal design of supere-lastic-friction base isolators for seismic protection of highwaybridges against near-field earthquakesrdquo Earthquake Engineeringand Structural Dynamics vol 40 no 3 pp 273ndash291 2011
[21] D A Shook P N Roschke and O E Ozbulut ldquoSuperelasticsemi-active damping of a base-isolated structurerdquo StructuralControl and HealthMonitoring vol 15 no 5 pp 746ndash768 2008
[22] K D PhamG JinM K Sain B F Spencer Jr and S R LibertyldquoGeneralized linear quadratic Gaussian techniques for the windbenchmark problemrdquo Journal of Engineering Mechanics vol130 no 4 pp 466ndash470 2004
[23] S Nagarajaiah and S Narasimhan ldquoSmart base-isolated bench-mark building Part II Phase I sample controllers for linearisolation systemsrdquo Structural Control and Health Monitoringvol 13 no 2-3 pp 605ndash625 2006
Figure 10 Encoding structure for genetic algorithm
of piezoelectric friction damper The initial population sizegenetic algebra and crossover probability are set to 20 50and 08 respectively Through inputting the artificial earth-quakes which are characterized by near-fault earthquakesfor different ground sites the supervisory fuzzy control andpreload of piezoelectric friction dampers can be optimizedThe fuzzy control surfaces of optimized supervisory fuzzycontrol are shown in Figure 12
5 Linear Quadratic Gaussian Controller
LQG (Linear Quadratic Gaussian) method is based onKalman filter technique which has become a widely usedcontrol algorithm For comparison purpose LQG is adoptedto regulate the contact normal force of piezoelectric frictiondamper in the study The optimal controller takes groundacceleration as white noise and considers the velocity anddisplacement of base isolation as feedback signals Thecontrol performance index is defined as follows [22]
119869 = lim120591rarr+infin
1
120591
sdot 119864 int
120591
0
[Z (119905)119879QZ (119905) + U (119905)119879RU (119905)] 119889 (119905) (10)
where Q2119899times2119899
and R1times1
are semi-positive definite matrix andpositive definite matrix respectivelyThe control force can beobtained as follows
U (119905) = minusGZ (119905) (11)
G = Rminus1B119879P (12)
where P can be computed by the solution of the Riccatiequation as follows
minusPA minus A119879P + PBRminus1B119879P minusQ = 0 (13)
The control force obtained from the above equation isactive control force which could not be always achieved bypiezoelectric friction damper It is realized that the directionof active control force is opposite to the slipping direction ofpiezoelectric friction damper Therefore the desired controlforce119906
119889(119905) can be achieved according to the following criteria
Whether or not to meet thecondition of convergence
Figure 11 Flow chart of genetic algorithm
where 119906active is the control force obtained from LQG con-troller
119887is the velocity of base isolator119891max and119891min are the
maximum and minimum friction forces of the piezoelectricfriction damper respectively
6 Numerical Simulations
61 Model of the Base-Isolated Structure A five-story base-isolated building which is proposed by He et al is employedto evaluate the performance of developed fuzzy controllers[18] The fundamental period of the five-story building is03 s For the given isolation parameters the fundamentalperiod of the base-isolated building becomes 25 sThereforean isolation ratio 120575 equal to 83 (=2503) is obtainedThe model of the base-isolated structure with piezoelectricfriction damper is shown in Figure 13 The parameters of thebase-isolated structure are shown in Table 5
62 Performance Evaluation Index In order to evaluate theperformance of base-isolated structure for different controlalgorithms a total of nine performance indexes are employedin this study [23] as shown in Table 6
The performance indexes J1through J
5denote the struc-
ture responses for the controlled building normalized byuncontrolled structure respectively The performance indexJ6evaluates the peak control force normalized by the peak
base shear for controlled structure The performance indexesJ7and J8represent RMS (Root Mean Square) base displace-
ments and RMS floor accelerations respectively J9computes
the energy dissipated by friction dampers normalized by theearthquake input energy to the controlled structure
63 Simulation Results and Analysis A total of nine seis-mic excitations that contain six real ground motions andthree artificial earthquakes are selected to evaluate the per-formance of the optimized fuzzy logic controller In thisstudy the time histories of strong earthquake which rangefrom 20 s to 70 s are selected for numerical simulation andanalysis
The numerical results for various earthquakes are listedin Table 7 In the table the Genetic Algorithm HierarchicFuzzy Logic Control is named as GHFLC Moreover forcomparison purpose the results for an optimal controller andpassive operation of friction damper are also listed in thetable Numbers in bold font indicate the best results amongall control cases
Base displacement is an important index to evaluatethe effectiveness for different controllers For a base-isolatedstructure the reduction of base displacement is a primarypurpose to prevent permanent damage for isolation bearingsor adjacent buildings Although passive operation of frictiondampers can successfully reduce the performance indexassociated with the peak and RMS base displacements (J
3and
J7) it causes significant amplification in peak and RMS floor
accelerations (J5and J
8) for most cases due to the passive
control For example as compared to the uncontrolledstructure for TCU052 TCU053 and TCU054 earthquakespassive control leads to 6 45 and 42 amplification inpeak floor acceleration respectively However the proposedfuzzy controller can successfully improve the base-isolatedstructure acceleration at the cost of slight deterioration in theperformance indices J
3and J7on comparison with passive
control For example for TCU052 TCU053 and TCU054earthquakes GHFLC results in 15 13 and 16 decrease inpeak floor accelerations respectively As compared to passivecontrol there are 9 3 and 7 increase in peak basedisplacements
The time histories of friction force and force-displacement curves of friction dampers for differentcontrollers subjected to TCU052 earthquake are shown inFigure 14 From the figures it can be seen that the passivecontrol outputs lager damper force than GHFLC Becausethe supervisory fuzzy control can alter input normalizationfactors of sublevel FLC according to the current level ofground motion there are some serrations presented at theedge of the hysteretic curve of piezoelectric friction damper
The comparison of the performance indexes J3 J7 J5and
J8under different control cases is shown in Figures 15 and
16 respectively From these figures it can be seen that thefuzzy controller is more effective than passive and optimal
Mathematical Problems in Engineering 11O
utpu
t
009
055
026
000033
000094000
Input ground velocity (ms)
Nd
N
(a) Hard soilO
utpu
t
Input ground velocity (ms)
071
042
000
008000
037
103000
Nd
N
(b) Medium soil
Out
put
Input ground velocity (ms)
107
053
000045
011000
117000
Nd
N
(c) Soft soil
Figure 12 Control surface for optimized supervisory fuzzy control
PFD
Fixed reference
LRB
Figure 13 Model of the base-isolated structure
12 Mathematical Problems in Engineering
Table 6 Performance index
Peak base shear Peak interstory drift RMS base displacement
controller in simultaneously depressing the superstructureacceleration and base displacement For example the appli-cation of developed fuzzy controller leads to an average of112 decrease in peak floor acceleration and an average ofonly 36 increase in peak base displacement as compared topassive control Particularly optimal controller produces anaverage of only 41 reduction in peak floor acceleration and
leads to 79 increase in peak base displacement as comparedto passive control Therefore the improved fuzzy controlmethod shows better performance than passive and optimalcontrol
In order to further evaluate the performance of differentcontrollers the energy time histories for different controllersare compared with each other For a base-isolated structure
Mathematical Problems in Engineering 13
20 30 40 50 60 70minus20
minus10
00
10
20Fr
ictio
n fo
rce (
kN)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(a) Passive control
20 30 40 50 60 70minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(b) GHFLC method
Figure 14 Time histories of friction force and force-displacement diagram against TCU052 earthquake
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation case
Passive OptimalGHFLC
1 2 3 4 5 6 7 8 903
04
05
06
07
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 15 Comparisons on the performance indexes J3and J7for different control cases
14 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
Excitation case
Passive
GHFLC Optimal
J 8J 5
Figure 16 Comparison of the performance indexes J5and J8for different control cases
with piezoelectric friction dampers installed on the isolationthe energy equations are defined as follows
where 119864119870 119864120585 119864119878 119864119867 and 119864
119868denote the absolute kinetic
energy damping energy elastic strain energy energy dis-sipated by piezoelectric friction dampers and total inputenergy respectively The energy time histories for differentcontrollers against TCU052Chi-Chi earthquake are shown inFigure 17 It can be seen from the figures that the piezoelectricfriction dampers dissipate most of the input energy fordifferent control cases subjected to TCU052 earthquake
In order to compare different effects under near-faultground motions recorded for different sites the average ofinput energy and structure responses subjected to near-faultearthquakes are given in Table 8
As shown in Table 8 the near-fault earthquakes forsoft sites are more destructive than hard sites For instancecompared to hard sites the input energy and the base dis-placement of RMS of the base-isolated structure for soft soil
increase by 143 and 256 respectively However GHFLCpossesses favorable performance under different ground sitesand the damping effect has no distinctly direct relationshipwith site category
As discussed in Section 61 the isolation ratio of thesimulation model equals 83 In order to evaluate the effectsof isolation ratio on the damping performance of GHFLC thestiffness value of isolation is adjusted to 1045 and 452 kNmrespectively Then the numerical results for different valuesof isolation ratio (120575 = 4 6) are obtained The performanceindexes J
3and J5for different isolation ratios are shown in
Figures 18 and 19 respectivelyFor base-isolated structure isolation ratio has a signifi-
cant influence on the isolation effect A larger isolation ratiowhich means a minor stiffness value of isolation usuallyleads to conspicuous enlargement of base displacement anddecrease of superstructural responses due to the increaseof fundamental vibration period and vice versa Howeveras shown in Figures 18 and 19 the shock absorption rateof GHFLC has little change when isolation ratio variesdifferently and the proposed fuzzy control shows favorableeffectiveness in the diverse isolation ratios of base-isolatedstructures
7 Conclusions
In this study an optimized fuzzy logic control which isdesigned for Chi-Chi near-fault earthquakes under differentground sites is proposed An elastic design spectrum isproposed to generate near-fault earthquakes for differentground sitesThe characteristic of the design spectrum is thatit has larger periods and peak acceleration than conventionalspectrum Genetic algorithm is employed to optimize thesupervisory fuzzy controller and preload of piezoelectric
Mathematical Problems in Engineering 15
Table 8 Average ofinput energy and structure responses subjected to near-fault earthquakes
Site classification Input energy (kNsdotm) Base shear (kN) Base displacement ofRMS (m)
Figure 17 Energy time histories subjected to Chi-Chi TCU052 earthquake
friction dampers according to three artificial earthquakesthat are characterized by Chi-Chi earthquakes Passive andoptimal controllers are also compared with the performanceof the developed fuzzy controller The simulation resultsreveal that the developed semiactive fuzzy controller hasbetter performance than traditional passive and optimal con-troller in simultaneously reducing the base displacement and
floor acceleration under near-fault earthquakes for differentground sites
Conflict of Interests
The authors declare no conflict of interests regarding thepublication of this paper
16 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation case
Passive
GHFLC Optimal
J 3 J 5Figure 18 Comparisons on the performance indexes J
3and J5for different control cases (120575 = 4)
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 19 Comparisons on the performance indexes J3and J5for different control cases (120575 = 6)
Acknowledgments
This research was supported by National Natural ScienceFoundation of China under Grant no 51308487 no 41402261and no 51408526 Hebei Provincial Natural Science Founda-tion ofChina underGrant no E2014203055 and the ExcellentYouth Foundation of Hebei Educational Committee underGrant no YQ2013015 The support for this research is greatlyappreciated
References
[1] C Alhan and H Gavin ldquoA parametric study of linear and non-linear passively damped seismic isolation systems for buildingsrdquoEngineering Structures vol 26 no 4 pp 485ndash497 2004
[2] R S Jangid and J M Kelly ldquoBase isolation for near-faultmotionsrdquoEarthquake Engineering and Structural Dynamics vol30 no 5 pp 691ndash707 2001
[3] J Shen M-H Tsai K-C Chang and G C Lee ldquoPerformanceof a seismically isolated bridge under near-fault earthquake
[4] F Mazza A Vulcano and M Mazza ldquoNonlinear dynamicresponse of RC buildings with different base Isolation systemssubjected to horizontal and vertical components of near-faultground motionsrdquo Open Construction and Building TechnologyJournal vol 6 pp 373ndash383 2012
[5] F Mazza and A Vulcano ldquoEffects of near-fault ground motionson the nonlinear dynamic response of base-isolated rc framedbuildingsrdquo Earthquake Engineering and Structural Dynamicsvol 41 no 2 pp 211ndash232 2012
[6] O E Ozbulut and S Hurlebaus ldquoFuzzy control of piezoelectricfriction dampers for seismic protection of smart base isolatedbuildingsrdquo Bulletin of Earthquake Engineering vol 8 no 6 pp1435ndash1455 2010
[7] O E Ozbulut M Bitaraf and S Hurlebaus ldquoAdaptive controlof base-isolated structures against near-field earthquakes usingvariable friction dampersrdquo Engineering Structures vol 33 no12 pp 3143ndash3154 2011
[8] J M Kelly ldquoThe role of damping in seismic isolationrdquo Earth-quake Engineering and Structural Dynamics vol 28 no 1 pp3ndash20 1999
[9] F Mazza and A Vulcano ldquoNonlinear response of RC framedbuildings with isolation and supplemental damping at the basesubjected to near-fault earthquakesrdquo Journal of EarthquakeEngineering vol 13 no 5 pp 690ndash715 2009
[10] M Bitaraf and S Hurlebaus ldquoSemi-active adaptive control ofseismically excited 20-story nonlinear buildingrdquo EngineeringStructures vol 56 no 11 pp 2107ndash2118 2013
[11] D Das T K Datta and A Madan ldquoSemiactive fuzzy controlof the seismic response of building frames with MR dampersrdquoEarthquake Engineering and Structural Dynamics vol 41 no 1pp 99ndash118 2012
[12] A-P Wang and C-D Lee ldquoFuzzy sliding mode control for abuilding structure based on genetic algorithmsrdquo EarthquakeEngineering and Structural Dynamics vol 31 no 4 pp 881ndash8952002
[13] D G Reigles and M D Symans ldquoSupervisory fuzzy controlof a base-isolated benchmark building utilizing a neuro-fuzzymodel of controllable fluid viscous dampersrdquo Structural Controland Health Monitoring vol 13 no 2-3 pp 724ndash747 2006
[14] H-S Kim and P N Roschke ldquoGA-fuzzy control of smartbase isolated benchmark building using supervisory controltechniquerdquo Advances in Engineering Software vol 38 no 7 pp453ndash465 2007
[15] D Yang and Y Zhao ldquoEffects of rupture forward directivity andfling step of near-fault groundmotions on seismic performanceof base-isolated building structurerdquo Acta Seismologica Sinicavol 32 no 5 pp 579ndash587 2010
[16] Y E-A Mohamedzein J A Abdalla and A Abdelwahab ldquoSiteresponse and earthquake design spectra for central KhartoumSudanrdquoBulletin of Earthquake Engineering vol 4 no 3 pp 277ndash293 2006
[17] D Zhao and H Li ldquoShaking table tests and analyses of semi-active fuzzy control for structural seismic reduction with apiezoelectric variable-friction damperrdquo Smart Materials andStructures vol 19 no 10 Article ID 105031 2010
[18] W L He A K Agrawal and J N Yang ldquoNovel semiactivefriction controller for linear structures against earthquakesrdquoJournal of Structural Engineering vol 129 no 7 pp 941ndash9502003
[19] J N Yang and A K Agrawal ldquoSemi-active hybrid controlsystems for nonlinear buildings against near-field earthquakesrdquoEngineering Structures vol 24 no 3 pp 271ndash280 2002
[20] O E Ozbulut and S Hurlebaus ldquoOptimal design of supere-lastic-friction base isolators for seismic protection of highwaybridges against near-field earthquakesrdquo Earthquake Engineeringand Structural Dynamics vol 40 no 3 pp 273ndash291 2011
[21] D A Shook P N Roschke and O E Ozbulut ldquoSuperelasticsemi-active damping of a base-isolated structurerdquo StructuralControl and HealthMonitoring vol 15 no 5 pp 746ndash768 2008
[22] K D PhamG JinM K Sain B F Spencer Jr and S R LibertyldquoGeneralized linear quadratic Gaussian techniques for the windbenchmark problemrdquo Journal of Engineering Mechanics vol130 no 4 pp 466ndash470 2004
[23] S Nagarajaiah and S Narasimhan ldquoSmart base-isolated bench-mark building Part II Phase I sample controllers for linearisolation systemsrdquo Structural Control and Health Monitoringvol 13 no 2-3 pp 605ndash625 2006
Whether or not to meet thecondition of convergence
Figure 11 Flow chart of genetic algorithm
where 119906active is the control force obtained from LQG con-troller
119887is the velocity of base isolator119891max and119891min are the
maximum and minimum friction forces of the piezoelectricfriction damper respectively
6 Numerical Simulations
61 Model of the Base-Isolated Structure A five-story base-isolated building which is proposed by He et al is employedto evaluate the performance of developed fuzzy controllers[18] The fundamental period of the five-story building is03 s For the given isolation parameters the fundamentalperiod of the base-isolated building becomes 25 sThereforean isolation ratio 120575 equal to 83 (=2503) is obtainedThe model of the base-isolated structure with piezoelectricfriction damper is shown in Figure 13 The parameters of thebase-isolated structure are shown in Table 5
62 Performance Evaluation Index In order to evaluate theperformance of base-isolated structure for different controlalgorithms a total of nine performance indexes are employedin this study [23] as shown in Table 6
The performance indexes J1through J
5denote the struc-
ture responses for the controlled building normalized byuncontrolled structure respectively The performance indexJ6evaluates the peak control force normalized by the peak
base shear for controlled structure The performance indexesJ7and J8represent RMS (Root Mean Square) base displace-
ments and RMS floor accelerations respectively J9computes
the energy dissipated by friction dampers normalized by theearthquake input energy to the controlled structure
63 Simulation Results and Analysis A total of nine seis-mic excitations that contain six real ground motions andthree artificial earthquakes are selected to evaluate the per-formance of the optimized fuzzy logic controller In thisstudy the time histories of strong earthquake which rangefrom 20 s to 70 s are selected for numerical simulation andanalysis
The numerical results for various earthquakes are listedin Table 7 In the table the Genetic Algorithm HierarchicFuzzy Logic Control is named as GHFLC Moreover forcomparison purpose the results for an optimal controller andpassive operation of friction damper are also listed in thetable Numbers in bold font indicate the best results amongall control cases
Base displacement is an important index to evaluatethe effectiveness for different controllers For a base-isolatedstructure the reduction of base displacement is a primarypurpose to prevent permanent damage for isolation bearingsor adjacent buildings Although passive operation of frictiondampers can successfully reduce the performance indexassociated with the peak and RMS base displacements (J
3and
J7) it causes significant amplification in peak and RMS floor
accelerations (J5and J
8) for most cases due to the passive
control For example as compared to the uncontrolledstructure for TCU052 TCU053 and TCU054 earthquakespassive control leads to 6 45 and 42 amplification inpeak floor acceleration respectively However the proposedfuzzy controller can successfully improve the base-isolatedstructure acceleration at the cost of slight deterioration in theperformance indices J
3and J7on comparison with passive
control For example for TCU052 TCU053 and TCU054earthquakes GHFLC results in 15 13 and 16 decrease inpeak floor accelerations respectively As compared to passivecontrol there are 9 3 and 7 increase in peak basedisplacements
The time histories of friction force and force-displacement curves of friction dampers for differentcontrollers subjected to TCU052 earthquake are shown inFigure 14 From the figures it can be seen that the passivecontrol outputs lager damper force than GHFLC Becausethe supervisory fuzzy control can alter input normalizationfactors of sublevel FLC according to the current level ofground motion there are some serrations presented at theedge of the hysteretic curve of piezoelectric friction damper
The comparison of the performance indexes J3 J7 J5and
J8under different control cases is shown in Figures 15 and
16 respectively From these figures it can be seen that thefuzzy controller is more effective than passive and optimal
Mathematical Problems in Engineering 11O
utpu
t
009
055
026
000033
000094000
Input ground velocity (ms)
Nd
N
(a) Hard soilO
utpu
t
Input ground velocity (ms)
071
042
000
008000
037
103000
Nd
N
(b) Medium soil
Out
put
Input ground velocity (ms)
107
053
000045
011000
117000
Nd
N
(c) Soft soil
Figure 12 Control surface for optimized supervisory fuzzy control
PFD
Fixed reference
LRB
Figure 13 Model of the base-isolated structure
12 Mathematical Problems in Engineering
Table 6 Performance index
Peak base shear Peak interstory drift RMS base displacement
controller in simultaneously depressing the superstructureacceleration and base displacement For example the appli-cation of developed fuzzy controller leads to an average of112 decrease in peak floor acceleration and an average ofonly 36 increase in peak base displacement as compared topassive control Particularly optimal controller produces anaverage of only 41 reduction in peak floor acceleration and
leads to 79 increase in peak base displacement as comparedto passive control Therefore the improved fuzzy controlmethod shows better performance than passive and optimalcontrol
In order to further evaluate the performance of differentcontrollers the energy time histories for different controllersare compared with each other For a base-isolated structure
Mathematical Problems in Engineering 13
20 30 40 50 60 70minus20
minus10
00
10
20Fr
ictio
n fo
rce (
kN)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(a) Passive control
20 30 40 50 60 70minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(b) GHFLC method
Figure 14 Time histories of friction force and force-displacement diagram against TCU052 earthquake
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation case
Passive OptimalGHFLC
1 2 3 4 5 6 7 8 903
04
05
06
07
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 15 Comparisons on the performance indexes J3and J7for different control cases
14 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
Excitation case
Passive
GHFLC Optimal
J 8J 5
Figure 16 Comparison of the performance indexes J5and J8for different control cases
with piezoelectric friction dampers installed on the isolationthe energy equations are defined as follows
where 119864119870 119864120585 119864119878 119864119867 and 119864
119868denote the absolute kinetic
energy damping energy elastic strain energy energy dis-sipated by piezoelectric friction dampers and total inputenergy respectively The energy time histories for differentcontrollers against TCU052Chi-Chi earthquake are shown inFigure 17 It can be seen from the figures that the piezoelectricfriction dampers dissipate most of the input energy fordifferent control cases subjected to TCU052 earthquake
In order to compare different effects under near-faultground motions recorded for different sites the average ofinput energy and structure responses subjected to near-faultearthquakes are given in Table 8
As shown in Table 8 the near-fault earthquakes forsoft sites are more destructive than hard sites For instancecompared to hard sites the input energy and the base dis-placement of RMS of the base-isolated structure for soft soil
increase by 143 and 256 respectively However GHFLCpossesses favorable performance under different ground sitesand the damping effect has no distinctly direct relationshipwith site category
As discussed in Section 61 the isolation ratio of thesimulation model equals 83 In order to evaluate the effectsof isolation ratio on the damping performance of GHFLC thestiffness value of isolation is adjusted to 1045 and 452 kNmrespectively Then the numerical results for different valuesof isolation ratio (120575 = 4 6) are obtained The performanceindexes J
3and J5for different isolation ratios are shown in
Figures 18 and 19 respectivelyFor base-isolated structure isolation ratio has a signifi-
cant influence on the isolation effect A larger isolation ratiowhich means a minor stiffness value of isolation usuallyleads to conspicuous enlargement of base displacement anddecrease of superstructural responses due to the increaseof fundamental vibration period and vice versa Howeveras shown in Figures 18 and 19 the shock absorption rateof GHFLC has little change when isolation ratio variesdifferently and the proposed fuzzy control shows favorableeffectiveness in the diverse isolation ratios of base-isolatedstructures
7 Conclusions
In this study an optimized fuzzy logic control which isdesigned for Chi-Chi near-fault earthquakes under differentground sites is proposed An elastic design spectrum isproposed to generate near-fault earthquakes for differentground sitesThe characteristic of the design spectrum is thatit has larger periods and peak acceleration than conventionalspectrum Genetic algorithm is employed to optimize thesupervisory fuzzy controller and preload of piezoelectric
Mathematical Problems in Engineering 15
Table 8 Average ofinput energy and structure responses subjected to near-fault earthquakes
Site classification Input energy (kNsdotm) Base shear (kN) Base displacement ofRMS (m)
Figure 17 Energy time histories subjected to Chi-Chi TCU052 earthquake
friction dampers according to three artificial earthquakesthat are characterized by Chi-Chi earthquakes Passive andoptimal controllers are also compared with the performanceof the developed fuzzy controller The simulation resultsreveal that the developed semiactive fuzzy controller hasbetter performance than traditional passive and optimal con-troller in simultaneously reducing the base displacement and
floor acceleration under near-fault earthquakes for differentground sites
Conflict of Interests
The authors declare no conflict of interests regarding thepublication of this paper
16 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation case
Passive
GHFLC Optimal
J 3 J 5Figure 18 Comparisons on the performance indexes J
3and J5for different control cases (120575 = 4)
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 19 Comparisons on the performance indexes J3and J5for different control cases (120575 = 6)
Acknowledgments
This research was supported by National Natural ScienceFoundation of China under Grant no 51308487 no 41402261and no 51408526 Hebei Provincial Natural Science Founda-tion ofChina underGrant no E2014203055 and the ExcellentYouth Foundation of Hebei Educational Committee underGrant no YQ2013015 The support for this research is greatlyappreciated
References
[1] C Alhan and H Gavin ldquoA parametric study of linear and non-linear passively damped seismic isolation systems for buildingsrdquoEngineering Structures vol 26 no 4 pp 485ndash497 2004
[2] R S Jangid and J M Kelly ldquoBase isolation for near-faultmotionsrdquoEarthquake Engineering and Structural Dynamics vol30 no 5 pp 691ndash707 2001
[3] J Shen M-H Tsai K-C Chang and G C Lee ldquoPerformanceof a seismically isolated bridge under near-fault earthquake
[4] F Mazza A Vulcano and M Mazza ldquoNonlinear dynamicresponse of RC buildings with different base Isolation systemssubjected to horizontal and vertical components of near-faultground motionsrdquo Open Construction and Building TechnologyJournal vol 6 pp 373ndash383 2012
[5] F Mazza and A Vulcano ldquoEffects of near-fault ground motionson the nonlinear dynamic response of base-isolated rc framedbuildingsrdquo Earthquake Engineering and Structural Dynamicsvol 41 no 2 pp 211ndash232 2012
[6] O E Ozbulut and S Hurlebaus ldquoFuzzy control of piezoelectricfriction dampers for seismic protection of smart base isolatedbuildingsrdquo Bulletin of Earthquake Engineering vol 8 no 6 pp1435ndash1455 2010
[7] O E Ozbulut M Bitaraf and S Hurlebaus ldquoAdaptive controlof base-isolated structures against near-field earthquakes usingvariable friction dampersrdquo Engineering Structures vol 33 no12 pp 3143ndash3154 2011
[8] J M Kelly ldquoThe role of damping in seismic isolationrdquo Earth-quake Engineering and Structural Dynamics vol 28 no 1 pp3ndash20 1999
[9] F Mazza and A Vulcano ldquoNonlinear response of RC framedbuildings with isolation and supplemental damping at the basesubjected to near-fault earthquakesrdquo Journal of EarthquakeEngineering vol 13 no 5 pp 690ndash715 2009
[10] M Bitaraf and S Hurlebaus ldquoSemi-active adaptive control ofseismically excited 20-story nonlinear buildingrdquo EngineeringStructures vol 56 no 11 pp 2107ndash2118 2013
[11] D Das T K Datta and A Madan ldquoSemiactive fuzzy controlof the seismic response of building frames with MR dampersrdquoEarthquake Engineering and Structural Dynamics vol 41 no 1pp 99ndash118 2012
[12] A-P Wang and C-D Lee ldquoFuzzy sliding mode control for abuilding structure based on genetic algorithmsrdquo EarthquakeEngineering and Structural Dynamics vol 31 no 4 pp 881ndash8952002
[13] D G Reigles and M D Symans ldquoSupervisory fuzzy controlof a base-isolated benchmark building utilizing a neuro-fuzzymodel of controllable fluid viscous dampersrdquo Structural Controland Health Monitoring vol 13 no 2-3 pp 724ndash747 2006
[14] H-S Kim and P N Roschke ldquoGA-fuzzy control of smartbase isolated benchmark building using supervisory controltechniquerdquo Advances in Engineering Software vol 38 no 7 pp453ndash465 2007
[15] D Yang and Y Zhao ldquoEffects of rupture forward directivity andfling step of near-fault groundmotions on seismic performanceof base-isolated building structurerdquo Acta Seismologica Sinicavol 32 no 5 pp 579ndash587 2010
[16] Y E-A Mohamedzein J A Abdalla and A Abdelwahab ldquoSiteresponse and earthquake design spectra for central KhartoumSudanrdquoBulletin of Earthquake Engineering vol 4 no 3 pp 277ndash293 2006
[17] D Zhao and H Li ldquoShaking table tests and analyses of semi-active fuzzy control for structural seismic reduction with apiezoelectric variable-friction damperrdquo Smart Materials andStructures vol 19 no 10 Article ID 105031 2010
[18] W L He A K Agrawal and J N Yang ldquoNovel semiactivefriction controller for linear structures against earthquakesrdquoJournal of Structural Engineering vol 129 no 7 pp 941ndash9502003
[19] J N Yang and A K Agrawal ldquoSemi-active hybrid controlsystems for nonlinear buildings against near-field earthquakesrdquoEngineering Structures vol 24 no 3 pp 271ndash280 2002
[20] O E Ozbulut and S Hurlebaus ldquoOptimal design of supere-lastic-friction base isolators for seismic protection of highwaybridges against near-field earthquakesrdquo Earthquake Engineeringand Structural Dynamics vol 40 no 3 pp 273ndash291 2011
[21] D A Shook P N Roschke and O E Ozbulut ldquoSuperelasticsemi-active damping of a base-isolated structurerdquo StructuralControl and HealthMonitoring vol 15 no 5 pp 746ndash768 2008
[22] K D PhamG JinM K Sain B F Spencer Jr and S R LibertyldquoGeneralized linear quadratic Gaussian techniques for the windbenchmark problemrdquo Journal of Engineering Mechanics vol130 no 4 pp 466ndash470 2004
[23] S Nagarajaiah and S Narasimhan ldquoSmart base-isolated bench-mark building Part II Phase I sample controllers for linearisolation systemsrdquo Structural Control and Health Monitoringvol 13 no 2-3 pp 605ndash625 2006
controller in simultaneously depressing the superstructureacceleration and base displacement For example the appli-cation of developed fuzzy controller leads to an average of112 decrease in peak floor acceleration and an average ofonly 36 increase in peak base displacement as compared topassive control Particularly optimal controller produces anaverage of only 41 reduction in peak floor acceleration and
leads to 79 increase in peak base displacement as comparedto passive control Therefore the improved fuzzy controlmethod shows better performance than passive and optimalcontrol
In order to further evaluate the performance of differentcontrollers the energy time histories for different controllersare compared with each other For a base-isolated structure
Mathematical Problems in Engineering 13
20 30 40 50 60 70minus20
minus10
00
10
20Fr
ictio
n fo
rce (
kN)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(a) Passive control
20 30 40 50 60 70minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(b) GHFLC method
Figure 14 Time histories of friction force and force-displacement diagram against TCU052 earthquake
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation case
Passive OptimalGHFLC
1 2 3 4 5 6 7 8 903
04
05
06
07
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 15 Comparisons on the performance indexes J3and J7for different control cases
14 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
Excitation case
Passive
GHFLC Optimal
J 8J 5
Figure 16 Comparison of the performance indexes J5and J8for different control cases
with piezoelectric friction dampers installed on the isolationthe energy equations are defined as follows
where 119864119870 119864120585 119864119878 119864119867 and 119864
119868denote the absolute kinetic
energy damping energy elastic strain energy energy dis-sipated by piezoelectric friction dampers and total inputenergy respectively The energy time histories for differentcontrollers against TCU052Chi-Chi earthquake are shown inFigure 17 It can be seen from the figures that the piezoelectricfriction dampers dissipate most of the input energy fordifferent control cases subjected to TCU052 earthquake
In order to compare different effects under near-faultground motions recorded for different sites the average ofinput energy and structure responses subjected to near-faultearthquakes are given in Table 8
As shown in Table 8 the near-fault earthquakes forsoft sites are more destructive than hard sites For instancecompared to hard sites the input energy and the base dis-placement of RMS of the base-isolated structure for soft soil
increase by 143 and 256 respectively However GHFLCpossesses favorable performance under different ground sitesand the damping effect has no distinctly direct relationshipwith site category
As discussed in Section 61 the isolation ratio of thesimulation model equals 83 In order to evaluate the effectsof isolation ratio on the damping performance of GHFLC thestiffness value of isolation is adjusted to 1045 and 452 kNmrespectively Then the numerical results for different valuesof isolation ratio (120575 = 4 6) are obtained The performanceindexes J
3and J5for different isolation ratios are shown in
Figures 18 and 19 respectivelyFor base-isolated structure isolation ratio has a signifi-
cant influence on the isolation effect A larger isolation ratiowhich means a minor stiffness value of isolation usuallyleads to conspicuous enlargement of base displacement anddecrease of superstructural responses due to the increaseof fundamental vibration period and vice versa Howeveras shown in Figures 18 and 19 the shock absorption rateof GHFLC has little change when isolation ratio variesdifferently and the proposed fuzzy control shows favorableeffectiveness in the diverse isolation ratios of base-isolatedstructures
7 Conclusions
In this study an optimized fuzzy logic control which isdesigned for Chi-Chi near-fault earthquakes under differentground sites is proposed An elastic design spectrum isproposed to generate near-fault earthquakes for differentground sitesThe characteristic of the design spectrum is thatit has larger periods and peak acceleration than conventionalspectrum Genetic algorithm is employed to optimize thesupervisory fuzzy controller and preload of piezoelectric
Mathematical Problems in Engineering 15
Table 8 Average ofinput energy and structure responses subjected to near-fault earthquakes
Site classification Input energy (kNsdotm) Base shear (kN) Base displacement ofRMS (m)
Figure 17 Energy time histories subjected to Chi-Chi TCU052 earthquake
friction dampers according to three artificial earthquakesthat are characterized by Chi-Chi earthquakes Passive andoptimal controllers are also compared with the performanceof the developed fuzzy controller The simulation resultsreveal that the developed semiactive fuzzy controller hasbetter performance than traditional passive and optimal con-troller in simultaneously reducing the base displacement and
floor acceleration under near-fault earthquakes for differentground sites
Conflict of Interests
The authors declare no conflict of interests regarding thepublication of this paper
16 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation case
Passive
GHFLC Optimal
J 3 J 5Figure 18 Comparisons on the performance indexes J
3and J5for different control cases (120575 = 4)
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 19 Comparisons on the performance indexes J3and J5for different control cases (120575 = 6)
Acknowledgments
This research was supported by National Natural ScienceFoundation of China under Grant no 51308487 no 41402261and no 51408526 Hebei Provincial Natural Science Founda-tion ofChina underGrant no E2014203055 and the ExcellentYouth Foundation of Hebei Educational Committee underGrant no YQ2013015 The support for this research is greatlyappreciated
References
[1] C Alhan and H Gavin ldquoA parametric study of linear and non-linear passively damped seismic isolation systems for buildingsrdquoEngineering Structures vol 26 no 4 pp 485ndash497 2004
[2] R S Jangid and J M Kelly ldquoBase isolation for near-faultmotionsrdquoEarthquake Engineering and Structural Dynamics vol30 no 5 pp 691ndash707 2001
[3] J Shen M-H Tsai K-C Chang and G C Lee ldquoPerformanceof a seismically isolated bridge under near-fault earthquake
[4] F Mazza A Vulcano and M Mazza ldquoNonlinear dynamicresponse of RC buildings with different base Isolation systemssubjected to horizontal and vertical components of near-faultground motionsrdquo Open Construction and Building TechnologyJournal vol 6 pp 373ndash383 2012
[5] F Mazza and A Vulcano ldquoEffects of near-fault ground motionson the nonlinear dynamic response of base-isolated rc framedbuildingsrdquo Earthquake Engineering and Structural Dynamicsvol 41 no 2 pp 211ndash232 2012
[6] O E Ozbulut and S Hurlebaus ldquoFuzzy control of piezoelectricfriction dampers for seismic protection of smart base isolatedbuildingsrdquo Bulletin of Earthquake Engineering vol 8 no 6 pp1435ndash1455 2010
[7] O E Ozbulut M Bitaraf and S Hurlebaus ldquoAdaptive controlof base-isolated structures against near-field earthquakes usingvariable friction dampersrdquo Engineering Structures vol 33 no12 pp 3143ndash3154 2011
[8] J M Kelly ldquoThe role of damping in seismic isolationrdquo Earth-quake Engineering and Structural Dynamics vol 28 no 1 pp3ndash20 1999
[9] F Mazza and A Vulcano ldquoNonlinear response of RC framedbuildings with isolation and supplemental damping at the basesubjected to near-fault earthquakesrdquo Journal of EarthquakeEngineering vol 13 no 5 pp 690ndash715 2009
[10] M Bitaraf and S Hurlebaus ldquoSemi-active adaptive control ofseismically excited 20-story nonlinear buildingrdquo EngineeringStructures vol 56 no 11 pp 2107ndash2118 2013
[11] D Das T K Datta and A Madan ldquoSemiactive fuzzy controlof the seismic response of building frames with MR dampersrdquoEarthquake Engineering and Structural Dynamics vol 41 no 1pp 99ndash118 2012
[12] A-P Wang and C-D Lee ldquoFuzzy sliding mode control for abuilding structure based on genetic algorithmsrdquo EarthquakeEngineering and Structural Dynamics vol 31 no 4 pp 881ndash8952002
[13] D G Reigles and M D Symans ldquoSupervisory fuzzy controlof a base-isolated benchmark building utilizing a neuro-fuzzymodel of controllable fluid viscous dampersrdquo Structural Controland Health Monitoring vol 13 no 2-3 pp 724ndash747 2006
[14] H-S Kim and P N Roschke ldquoGA-fuzzy control of smartbase isolated benchmark building using supervisory controltechniquerdquo Advances in Engineering Software vol 38 no 7 pp453ndash465 2007
[15] D Yang and Y Zhao ldquoEffects of rupture forward directivity andfling step of near-fault groundmotions on seismic performanceof base-isolated building structurerdquo Acta Seismologica Sinicavol 32 no 5 pp 579ndash587 2010
[16] Y E-A Mohamedzein J A Abdalla and A Abdelwahab ldquoSiteresponse and earthquake design spectra for central KhartoumSudanrdquoBulletin of Earthquake Engineering vol 4 no 3 pp 277ndash293 2006
[17] D Zhao and H Li ldquoShaking table tests and analyses of semi-active fuzzy control for structural seismic reduction with apiezoelectric variable-friction damperrdquo Smart Materials andStructures vol 19 no 10 Article ID 105031 2010
[18] W L He A K Agrawal and J N Yang ldquoNovel semiactivefriction controller for linear structures against earthquakesrdquoJournal of Structural Engineering vol 129 no 7 pp 941ndash9502003
[19] J N Yang and A K Agrawal ldquoSemi-active hybrid controlsystems for nonlinear buildings against near-field earthquakesrdquoEngineering Structures vol 24 no 3 pp 271ndash280 2002
[20] O E Ozbulut and S Hurlebaus ldquoOptimal design of supere-lastic-friction base isolators for seismic protection of highwaybridges against near-field earthquakesrdquo Earthquake Engineeringand Structural Dynamics vol 40 no 3 pp 273ndash291 2011
[21] D A Shook P N Roschke and O E Ozbulut ldquoSuperelasticsemi-active damping of a base-isolated structurerdquo StructuralControl and HealthMonitoring vol 15 no 5 pp 746ndash768 2008
[22] K D PhamG JinM K Sain B F Spencer Jr and S R LibertyldquoGeneralized linear quadratic Gaussian techniques for the windbenchmark problemrdquo Journal of Engineering Mechanics vol130 no 4 pp 466ndash470 2004
[23] S Nagarajaiah and S Narasimhan ldquoSmart base-isolated bench-mark building Part II Phase I sample controllers for linearisolation systemsrdquo Structural Control and Health Monitoringvol 13 no 2-3 pp 605ndash625 2006
controller in simultaneously depressing the superstructureacceleration and base displacement For example the appli-cation of developed fuzzy controller leads to an average of112 decrease in peak floor acceleration and an average ofonly 36 increase in peak base displacement as compared topassive control Particularly optimal controller produces anaverage of only 41 reduction in peak floor acceleration and
leads to 79 increase in peak base displacement as comparedto passive control Therefore the improved fuzzy controlmethod shows better performance than passive and optimalcontrol
In order to further evaluate the performance of differentcontrollers the energy time histories for different controllersare compared with each other For a base-isolated structure
Mathematical Problems in Engineering 13
20 30 40 50 60 70minus20
minus10
00
10
20Fr
ictio
n fo
rce (
kN)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(a) Passive control
20 30 40 50 60 70minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Time (s)minus03 minus02 minus01 00 01 02 03
minus20
minus10
00
10
20
Fric
tion
forc
e (kN
)
Displacement (m)
(b) GHFLC method
Figure 14 Time histories of friction force and force-displacement diagram against TCU052 earthquake
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation case
Passive OptimalGHFLC
1 2 3 4 5 6 7 8 903
04
05
06
07
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 15 Comparisons on the performance indexes J3and J7for different control cases
14 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
Excitation case
Passive
GHFLC Optimal
J 8J 5
Figure 16 Comparison of the performance indexes J5and J8for different control cases
with piezoelectric friction dampers installed on the isolationthe energy equations are defined as follows
where 119864119870 119864120585 119864119878 119864119867 and 119864
119868denote the absolute kinetic
energy damping energy elastic strain energy energy dis-sipated by piezoelectric friction dampers and total inputenergy respectively The energy time histories for differentcontrollers against TCU052Chi-Chi earthquake are shown inFigure 17 It can be seen from the figures that the piezoelectricfriction dampers dissipate most of the input energy fordifferent control cases subjected to TCU052 earthquake
In order to compare different effects under near-faultground motions recorded for different sites the average ofinput energy and structure responses subjected to near-faultearthquakes are given in Table 8
As shown in Table 8 the near-fault earthquakes forsoft sites are more destructive than hard sites For instancecompared to hard sites the input energy and the base dis-placement of RMS of the base-isolated structure for soft soil
increase by 143 and 256 respectively However GHFLCpossesses favorable performance under different ground sitesand the damping effect has no distinctly direct relationshipwith site category
As discussed in Section 61 the isolation ratio of thesimulation model equals 83 In order to evaluate the effectsof isolation ratio on the damping performance of GHFLC thestiffness value of isolation is adjusted to 1045 and 452 kNmrespectively Then the numerical results for different valuesof isolation ratio (120575 = 4 6) are obtained The performanceindexes J
3and J5for different isolation ratios are shown in
Figures 18 and 19 respectivelyFor base-isolated structure isolation ratio has a signifi-
cant influence on the isolation effect A larger isolation ratiowhich means a minor stiffness value of isolation usuallyleads to conspicuous enlargement of base displacement anddecrease of superstructural responses due to the increaseof fundamental vibration period and vice versa Howeveras shown in Figures 18 and 19 the shock absorption rateof GHFLC has little change when isolation ratio variesdifferently and the proposed fuzzy control shows favorableeffectiveness in the diverse isolation ratios of base-isolatedstructures
7 Conclusions
In this study an optimized fuzzy logic control which isdesigned for Chi-Chi near-fault earthquakes under differentground sites is proposed An elastic design spectrum isproposed to generate near-fault earthquakes for differentground sitesThe characteristic of the design spectrum is thatit has larger periods and peak acceleration than conventionalspectrum Genetic algorithm is employed to optimize thesupervisory fuzzy controller and preload of piezoelectric
Mathematical Problems in Engineering 15
Table 8 Average ofinput energy and structure responses subjected to near-fault earthquakes
Site classification Input energy (kNsdotm) Base shear (kN) Base displacement ofRMS (m)
Figure 17 Energy time histories subjected to Chi-Chi TCU052 earthquake
friction dampers according to three artificial earthquakesthat are characterized by Chi-Chi earthquakes Passive andoptimal controllers are also compared with the performanceof the developed fuzzy controller The simulation resultsreveal that the developed semiactive fuzzy controller hasbetter performance than traditional passive and optimal con-troller in simultaneously reducing the base displacement and
floor acceleration under near-fault earthquakes for differentground sites
Conflict of Interests
The authors declare no conflict of interests regarding thepublication of this paper
16 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation case
Passive
GHFLC Optimal
J 3 J 5Figure 18 Comparisons on the performance indexes J
3and J5for different control cases (120575 = 4)
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 19 Comparisons on the performance indexes J3and J5for different control cases (120575 = 6)
Acknowledgments
This research was supported by National Natural ScienceFoundation of China under Grant no 51308487 no 41402261and no 51408526 Hebei Provincial Natural Science Founda-tion ofChina underGrant no E2014203055 and the ExcellentYouth Foundation of Hebei Educational Committee underGrant no YQ2013015 The support for this research is greatlyappreciated
References
[1] C Alhan and H Gavin ldquoA parametric study of linear and non-linear passively damped seismic isolation systems for buildingsrdquoEngineering Structures vol 26 no 4 pp 485ndash497 2004
[2] R S Jangid and J M Kelly ldquoBase isolation for near-faultmotionsrdquoEarthquake Engineering and Structural Dynamics vol30 no 5 pp 691ndash707 2001
[3] J Shen M-H Tsai K-C Chang and G C Lee ldquoPerformanceof a seismically isolated bridge under near-fault earthquake
[4] F Mazza A Vulcano and M Mazza ldquoNonlinear dynamicresponse of RC buildings with different base Isolation systemssubjected to horizontal and vertical components of near-faultground motionsrdquo Open Construction and Building TechnologyJournal vol 6 pp 373ndash383 2012
[5] F Mazza and A Vulcano ldquoEffects of near-fault ground motionson the nonlinear dynamic response of base-isolated rc framedbuildingsrdquo Earthquake Engineering and Structural Dynamicsvol 41 no 2 pp 211ndash232 2012
[6] O E Ozbulut and S Hurlebaus ldquoFuzzy control of piezoelectricfriction dampers for seismic protection of smart base isolatedbuildingsrdquo Bulletin of Earthquake Engineering vol 8 no 6 pp1435ndash1455 2010
[7] O E Ozbulut M Bitaraf and S Hurlebaus ldquoAdaptive controlof base-isolated structures against near-field earthquakes usingvariable friction dampersrdquo Engineering Structures vol 33 no12 pp 3143ndash3154 2011
[8] J M Kelly ldquoThe role of damping in seismic isolationrdquo Earth-quake Engineering and Structural Dynamics vol 28 no 1 pp3ndash20 1999
[9] F Mazza and A Vulcano ldquoNonlinear response of RC framedbuildings with isolation and supplemental damping at the basesubjected to near-fault earthquakesrdquo Journal of EarthquakeEngineering vol 13 no 5 pp 690ndash715 2009
[10] M Bitaraf and S Hurlebaus ldquoSemi-active adaptive control ofseismically excited 20-story nonlinear buildingrdquo EngineeringStructures vol 56 no 11 pp 2107ndash2118 2013
[11] D Das T K Datta and A Madan ldquoSemiactive fuzzy controlof the seismic response of building frames with MR dampersrdquoEarthquake Engineering and Structural Dynamics vol 41 no 1pp 99ndash118 2012
[12] A-P Wang and C-D Lee ldquoFuzzy sliding mode control for abuilding structure based on genetic algorithmsrdquo EarthquakeEngineering and Structural Dynamics vol 31 no 4 pp 881ndash8952002
[13] D G Reigles and M D Symans ldquoSupervisory fuzzy controlof a base-isolated benchmark building utilizing a neuro-fuzzymodel of controllable fluid viscous dampersrdquo Structural Controland Health Monitoring vol 13 no 2-3 pp 724ndash747 2006
[14] H-S Kim and P N Roschke ldquoGA-fuzzy control of smartbase isolated benchmark building using supervisory controltechniquerdquo Advances in Engineering Software vol 38 no 7 pp453ndash465 2007
[15] D Yang and Y Zhao ldquoEffects of rupture forward directivity andfling step of near-fault groundmotions on seismic performanceof base-isolated building structurerdquo Acta Seismologica Sinicavol 32 no 5 pp 579ndash587 2010
[16] Y E-A Mohamedzein J A Abdalla and A Abdelwahab ldquoSiteresponse and earthquake design spectra for central KhartoumSudanrdquoBulletin of Earthquake Engineering vol 4 no 3 pp 277ndash293 2006
[17] D Zhao and H Li ldquoShaking table tests and analyses of semi-active fuzzy control for structural seismic reduction with apiezoelectric variable-friction damperrdquo Smart Materials andStructures vol 19 no 10 Article ID 105031 2010
[18] W L He A K Agrawal and J N Yang ldquoNovel semiactivefriction controller for linear structures against earthquakesrdquoJournal of Structural Engineering vol 129 no 7 pp 941ndash9502003
[19] J N Yang and A K Agrawal ldquoSemi-active hybrid controlsystems for nonlinear buildings against near-field earthquakesrdquoEngineering Structures vol 24 no 3 pp 271ndash280 2002
[20] O E Ozbulut and S Hurlebaus ldquoOptimal design of supere-lastic-friction base isolators for seismic protection of highwaybridges against near-field earthquakesrdquo Earthquake Engineeringand Structural Dynamics vol 40 no 3 pp 273ndash291 2011
[21] D A Shook P N Roschke and O E Ozbulut ldquoSuperelasticsemi-active damping of a base-isolated structurerdquo StructuralControl and HealthMonitoring vol 15 no 5 pp 746ndash768 2008
[22] K D PhamG JinM K Sain B F Spencer Jr and S R LibertyldquoGeneralized linear quadratic Gaussian techniques for the windbenchmark problemrdquo Journal of Engineering Mechanics vol130 no 4 pp 466ndash470 2004
[23] S Nagarajaiah and S Narasimhan ldquoSmart base-isolated bench-mark building Part II Phase I sample controllers for linearisolation systemsrdquo Structural Control and Health Monitoringvol 13 no 2-3 pp 605ndash625 2006
where 119864119870 119864120585 119864119878 119864119867 and 119864
119868denote the absolute kinetic
energy damping energy elastic strain energy energy dis-sipated by piezoelectric friction dampers and total inputenergy respectively The energy time histories for differentcontrollers against TCU052Chi-Chi earthquake are shown inFigure 17 It can be seen from the figures that the piezoelectricfriction dampers dissipate most of the input energy fordifferent control cases subjected to TCU052 earthquake
In order to compare different effects under near-faultground motions recorded for different sites the average ofinput energy and structure responses subjected to near-faultearthquakes are given in Table 8
As shown in Table 8 the near-fault earthquakes forsoft sites are more destructive than hard sites For instancecompared to hard sites the input energy and the base dis-placement of RMS of the base-isolated structure for soft soil
increase by 143 and 256 respectively However GHFLCpossesses favorable performance under different ground sitesand the damping effect has no distinctly direct relationshipwith site category
As discussed in Section 61 the isolation ratio of thesimulation model equals 83 In order to evaluate the effectsof isolation ratio on the damping performance of GHFLC thestiffness value of isolation is adjusted to 1045 and 452 kNmrespectively Then the numerical results for different valuesof isolation ratio (120575 = 4 6) are obtained The performanceindexes J
3and J5for different isolation ratios are shown in
Figures 18 and 19 respectivelyFor base-isolated structure isolation ratio has a signifi-
cant influence on the isolation effect A larger isolation ratiowhich means a minor stiffness value of isolation usuallyleads to conspicuous enlargement of base displacement anddecrease of superstructural responses due to the increaseof fundamental vibration period and vice versa Howeveras shown in Figures 18 and 19 the shock absorption rateof GHFLC has little change when isolation ratio variesdifferently and the proposed fuzzy control shows favorableeffectiveness in the diverse isolation ratios of base-isolatedstructures
7 Conclusions
In this study an optimized fuzzy logic control which isdesigned for Chi-Chi near-fault earthquakes under differentground sites is proposed An elastic design spectrum isproposed to generate near-fault earthquakes for differentground sitesThe characteristic of the design spectrum is thatit has larger periods and peak acceleration than conventionalspectrum Genetic algorithm is employed to optimize thesupervisory fuzzy controller and preload of piezoelectric
Mathematical Problems in Engineering 15
Table 8 Average ofinput energy and structure responses subjected to near-fault earthquakes
Site classification Input energy (kNsdotm) Base shear (kN) Base displacement ofRMS (m)
Figure 17 Energy time histories subjected to Chi-Chi TCU052 earthquake
friction dampers according to three artificial earthquakesthat are characterized by Chi-Chi earthquakes Passive andoptimal controllers are also compared with the performanceof the developed fuzzy controller The simulation resultsreveal that the developed semiactive fuzzy controller hasbetter performance than traditional passive and optimal con-troller in simultaneously reducing the base displacement and
floor acceleration under near-fault earthquakes for differentground sites
Conflict of Interests
The authors declare no conflict of interests regarding thepublication of this paper
16 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation case
Passive
GHFLC Optimal
J 3 J 5Figure 18 Comparisons on the performance indexes J
3and J5for different control cases (120575 = 4)
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 19 Comparisons on the performance indexes J3and J5for different control cases (120575 = 6)
Acknowledgments
This research was supported by National Natural ScienceFoundation of China under Grant no 51308487 no 41402261and no 51408526 Hebei Provincial Natural Science Founda-tion ofChina underGrant no E2014203055 and the ExcellentYouth Foundation of Hebei Educational Committee underGrant no YQ2013015 The support for this research is greatlyappreciated
References
[1] C Alhan and H Gavin ldquoA parametric study of linear and non-linear passively damped seismic isolation systems for buildingsrdquoEngineering Structures vol 26 no 4 pp 485ndash497 2004
[2] R S Jangid and J M Kelly ldquoBase isolation for near-faultmotionsrdquoEarthquake Engineering and Structural Dynamics vol30 no 5 pp 691ndash707 2001
[3] J Shen M-H Tsai K-C Chang and G C Lee ldquoPerformanceof a seismically isolated bridge under near-fault earthquake
[4] F Mazza A Vulcano and M Mazza ldquoNonlinear dynamicresponse of RC buildings with different base Isolation systemssubjected to horizontal and vertical components of near-faultground motionsrdquo Open Construction and Building TechnologyJournal vol 6 pp 373ndash383 2012
[5] F Mazza and A Vulcano ldquoEffects of near-fault ground motionson the nonlinear dynamic response of base-isolated rc framedbuildingsrdquo Earthquake Engineering and Structural Dynamicsvol 41 no 2 pp 211ndash232 2012
[6] O E Ozbulut and S Hurlebaus ldquoFuzzy control of piezoelectricfriction dampers for seismic protection of smart base isolatedbuildingsrdquo Bulletin of Earthquake Engineering vol 8 no 6 pp1435ndash1455 2010
[7] O E Ozbulut M Bitaraf and S Hurlebaus ldquoAdaptive controlof base-isolated structures against near-field earthquakes usingvariable friction dampersrdquo Engineering Structures vol 33 no12 pp 3143ndash3154 2011
[8] J M Kelly ldquoThe role of damping in seismic isolationrdquo Earth-quake Engineering and Structural Dynamics vol 28 no 1 pp3ndash20 1999
[9] F Mazza and A Vulcano ldquoNonlinear response of RC framedbuildings with isolation and supplemental damping at the basesubjected to near-fault earthquakesrdquo Journal of EarthquakeEngineering vol 13 no 5 pp 690ndash715 2009
[10] M Bitaraf and S Hurlebaus ldquoSemi-active adaptive control ofseismically excited 20-story nonlinear buildingrdquo EngineeringStructures vol 56 no 11 pp 2107ndash2118 2013
[11] D Das T K Datta and A Madan ldquoSemiactive fuzzy controlof the seismic response of building frames with MR dampersrdquoEarthquake Engineering and Structural Dynamics vol 41 no 1pp 99ndash118 2012
[12] A-P Wang and C-D Lee ldquoFuzzy sliding mode control for abuilding structure based on genetic algorithmsrdquo EarthquakeEngineering and Structural Dynamics vol 31 no 4 pp 881ndash8952002
[13] D G Reigles and M D Symans ldquoSupervisory fuzzy controlof a base-isolated benchmark building utilizing a neuro-fuzzymodel of controllable fluid viscous dampersrdquo Structural Controland Health Monitoring vol 13 no 2-3 pp 724ndash747 2006
[14] H-S Kim and P N Roschke ldquoGA-fuzzy control of smartbase isolated benchmark building using supervisory controltechniquerdquo Advances in Engineering Software vol 38 no 7 pp453ndash465 2007
[15] D Yang and Y Zhao ldquoEffects of rupture forward directivity andfling step of near-fault groundmotions on seismic performanceof base-isolated building structurerdquo Acta Seismologica Sinicavol 32 no 5 pp 579ndash587 2010
[16] Y E-A Mohamedzein J A Abdalla and A Abdelwahab ldquoSiteresponse and earthquake design spectra for central KhartoumSudanrdquoBulletin of Earthquake Engineering vol 4 no 3 pp 277ndash293 2006
[17] D Zhao and H Li ldquoShaking table tests and analyses of semi-active fuzzy control for structural seismic reduction with apiezoelectric variable-friction damperrdquo Smart Materials andStructures vol 19 no 10 Article ID 105031 2010
[18] W L He A K Agrawal and J N Yang ldquoNovel semiactivefriction controller for linear structures against earthquakesrdquoJournal of Structural Engineering vol 129 no 7 pp 941ndash9502003
[19] J N Yang and A K Agrawal ldquoSemi-active hybrid controlsystems for nonlinear buildings against near-field earthquakesrdquoEngineering Structures vol 24 no 3 pp 271ndash280 2002
[20] O E Ozbulut and S Hurlebaus ldquoOptimal design of supere-lastic-friction base isolators for seismic protection of highwaybridges against near-field earthquakesrdquo Earthquake Engineeringand Structural Dynamics vol 40 no 3 pp 273ndash291 2011
[21] D A Shook P N Roschke and O E Ozbulut ldquoSuperelasticsemi-active damping of a base-isolated structurerdquo StructuralControl and HealthMonitoring vol 15 no 5 pp 746ndash768 2008
[22] K D PhamG JinM K Sain B F Spencer Jr and S R LibertyldquoGeneralized linear quadratic Gaussian techniques for the windbenchmark problemrdquo Journal of Engineering Mechanics vol130 no 4 pp 466ndash470 2004
[23] S Nagarajaiah and S Narasimhan ldquoSmart base-isolated bench-mark building Part II Phase I sample controllers for linearisolation systemsrdquo Structural Control and Health Monitoringvol 13 no 2-3 pp 605ndash625 2006
where 119864119870 119864120585 119864119878 119864119867 and 119864
119868denote the absolute kinetic
energy damping energy elastic strain energy energy dis-sipated by piezoelectric friction dampers and total inputenergy respectively The energy time histories for differentcontrollers against TCU052Chi-Chi earthquake are shown inFigure 17 It can be seen from the figures that the piezoelectricfriction dampers dissipate most of the input energy fordifferent control cases subjected to TCU052 earthquake
In order to compare different effects under near-faultground motions recorded for different sites the average ofinput energy and structure responses subjected to near-faultearthquakes are given in Table 8
As shown in Table 8 the near-fault earthquakes forsoft sites are more destructive than hard sites For instancecompared to hard sites the input energy and the base dis-placement of RMS of the base-isolated structure for soft soil
increase by 143 and 256 respectively However GHFLCpossesses favorable performance under different ground sitesand the damping effect has no distinctly direct relationshipwith site category
As discussed in Section 61 the isolation ratio of thesimulation model equals 83 In order to evaluate the effectsof isolation ratio on the damping performance of GHFLC thestiffness value of isolation is adjusted to 1045 and 452 kNmrespectively Then the numerical results for different valuesof isolation ratio (120575 = 4 6) are obtained The performanceindexes J
3and J5for different isolation ratios are shown in
Figures 18 and 19 respectivelyFor base-isolated structure isolation ratio has a signifi-
cant influence on the isolation effect A larger isolation ratiowhich means a minor stiffness value of isolation usuallyleads to conspicuous enlargement of base displacement anddecrease of superstructural responses due to the increaseof fundamental vibration period and vice versa Howeveras shown in Figures 18 and 19 the shock absorption rateof GHFLC has little change when isolation ratio variesdifferently and the proposed fuzzy control shows favorableeffectiveness in the diverse isolation ratios of base-isolatedstructures
7 Conclusions
In this study an optimized fuzzy logic control which isdesigned for Chi-Chi near-fault earthquakes under differentground sites is proposed An elastic design spectrum isproposed to generate near-fault earthquakes for differentground sitesThe characteristic of the design spectrum is thatit has larger periods and peak acceleration than conventionalspectrum Genetic algorithm is employed to optimize thesupervisory fuzzy controller and preload of piezoelectric
Mathematical Problems in Engineering 15
Table 8 Average ofinput energy and structure responses subjected to near-fault earthquakes
Site classification Input energy (kNsdotm) Base shear (kN) Base displacement ofRMS (m)
Figure 17 Energy time histories subjected to Chi-Chi TCU052 earthquake
friction dampers according to three artificial earthquakesthat are characterized by Chi-Chi earthquakes Passive andoptimal controllers are also compared with the performanceof the developed fuzzy controller The simulation resultsreveal that the developed semiactive fuzzy controller hasbetter performance than traditional passive and optimal con-troller in simultaneously reducing the base displacement and
floor acceleration under near-fault earthquakes for differentground sites
Conflict of Interests
The authors declare no conflict of interests regarding thepublication of this paper
16 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation case
Passive
GHFLC Optimal
J 3 J 5Figure 18 Comparisons on the performance indexes J
3and J5for different control cases (120575 = 4)
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 19 Comparisons on the performance indexes J3and J5for different control cases (120575 = 6)
Acknowledgments
This research was supported by National Natural ScienceFoundation of China under Grant no 51308487 no 41402261and no 51408526 Hebei Provincial Natural Science Founda-tion ofChina underGrant no E2014203055 and the ExcellentYouth Foundation of Hebei Educational Committee underGrant no YQ2013015 The support for this research is greatlyappreciated
References
[1] C Alhan and H Gavin ldquoA parametric study of linear and non-linear passively damped seismic isolation systems for buildingsrdquoEngineering Structures vol 26 no 4 pp 485ndash497 2004
[2] R S Jangid and J M Kelly ldquoBase isolation for near-faultmotionsrdquoEarthquake Engineering and Structural Dynamics vol30 no 5 pp 691ndash707 2001
[3] J Shen M-H Tsai K-C Chang and G C Lee ldquoPerformanceof a seismically isolated bridge under near-fault earthquake
[4] F Mazza A Vulcano and M Mazza ldquoNonlinear dynamicresponse of RC buildings with different base Isolation systemssubjected to horizontal and vertical components of near-faultground motionsrdquo Open Construction and Building TechnologyJournal vol 6 pp 373ndash383 2012
[5] F Mazza and A Vulcano ldquoEffects of near-fault ground motionson the nonlinear dynamic response of base-isolated rc framedbuildingsrdquo Earthquake Engineering and Structural Dynamicsvol 41 no 2 pp 211ndash232 2012
[6] O E Ozbulut and S Hurlebaus ldquoFuzzy control of piezoelectricfriction dampers for seismic protection of smart base isolatedbuildingsrdquo Bulletin of Earthquake Engineering vol 8 no 6 pp1435ndash1455 2010
[7] O E Ozbulut M Bitaraf and S Hurlebaus ldquoAdaptive controlof base-isolated structures against near-field earthquakes usingvariable friction dampersrdquo Engineering Structures vol 33 no12 pp 3143ndash3154 2011
[8] J M Kelly ldquoThe role of damping in seismic isolationrdquo Earth-quake Engineering and Structural Dynamics vol 28 no 1 pp3ndash20 1999
[9] F Mazza and A Vulcano ldquoNonlinear response of RC framedbuildings with isolation and supplemental damping at the basesubjected to near-fault earthquakesrdquo Journal of EarthquakeEngineering vol 13 no 5 pp 690ndash715 2009
[10] M Bitaraf and S Hurlebaus ldquoSemi-active adaptive control ofseismically excited 20-story nonlinear buildingrdquo EngineeringStructures vol 56 no 11 pp 2107ndash2118 2013
[11] D Das T K Datta and A Madan ldquoSemiactive fuzzy controlof the seismic response of building frames with MR dampersrdquoEarthquake Engineering and Structural Dynamics vol 41 no 1pp 99ndash118 2012
[12] A-P Wang and C-D Lee ldquoFuzzy sliding mode control for abuilding structure based on genetic algorithmsrdquo EarthquakeEngineering and Structural Dynamics vol 31 no 4 pp 881ndash8952002
[13] D G Reigles and M D Symans ldquoSupervisory fuzzy controlof a base-isolated benchmark building utilizing a neuro-fuzzymodel of controllable fluid viscous dampersrdquo Structural Controland Health Monitoring vol 13 no 2-3 pp 724ndash747 2006
[14] H-S Kim and P N Roschke ldquoGA-fuzzy control of smartbase isolated benchmark building using supervisory controltechniquerdquo Advances in Engineering Software vol 38 no 7 pp453ndash465 2007
[15] D Yang and Y Zhao ldquoEffects of rupture forward directivity andfling step of near-fault groundmotions on seismic performanceof base-isolated building structurerdquo Acta Seismologica Sinicavol 32 no 5 pp 579ndash587 2010
[16] Y E-A Mohamedzein J A Abdalla and A Abdelwahab ldquoSiteresponse and earthquake design spectra for central KhartoumSudanrdquoBulletin of Earthquake Engineering vol 4 no 3 pp 277ndash293 2006
[17] D Zhao and H Li ldquoShaking table tests and analyses of semi-active fuzzy control for structural seismic reduction with apiezoelectric variable-friction damperrdquo Smart Materials andStructures vol 19 no 10 Article ID 105031 2010
[18] W L He A K Agrawal and J N Yang ldquoNovel semiactivefriction controller for linear structures against earthquakesrdquoJournal of Structural Engineering vol 129 no 7 pp 941ndash9502003
[19] J N Yang and A K Agrawal ldquoSemi-active hybrid controlsystems for nonlinear buildings against near-field earthquakesrdquoEngineering Structures vol 24 no 3 pp 271ndash280 2002
[20] O E Ozbulut and S Hurlebaus ldquoOptimal design of supere-lastic-friction base isolators for seismic protection of highwaybridges against near-field earthquakesrdquo Earthquake Engineeringand Structural Dynamics vol 40 no 3 pp 273ndash291 2011
[21] D A Shook P N Roschke and O E Ozbulut ldquoSuperelasticsemi-active damping of a base-isolated structurerdquo StructuralControl and HealthMonitoring vol 15 no 5 pp 746ndash768 2008
[22] K D PhamG JinM K Sain B F Spencer Jr and S R LibertyldquoGeneralized linear quadratic Gaussian techniques for the windbenchmark problemrdquo Journal of Engineering Mechanics vol130 no 4 pp 466ndash470 2004
[23] S Nagarajaiah and S Narasimhan ldquoSmart base-isolated bench-mark building Part II Phase I sample controllers for linearisolation systemsrdquo Structural Control and Health Monitoringvol 13 no 2-3 pp 605ndash625 2006
Figure 17 Energy time histories subjected to Chi-Chi TCU052 earthquake
friction dampers according to three artificial earthquakesthat are characterized by Chi-Chi earthquakes Passive andoptimal controllers are also compared with the performanceof the developed fuzzy controller The simulation resultsreveal that the developed semiactive fuzzy controller hasbetter performance than traditional passive and optimal con-troller in simultaneously reducing the base displacement and
floor acceleration under near-fault earthquakes for differentground sites
Conflict of Interests
The authors declare no conflict of interests regarding thepublication of this paper
16 Mathematical Problems in Engineering
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation case
Passive
GHFLC Optimal
J 3 J 5Figure 18 Comparisons on the performance indexes J
3and J5for different control cases (120575 = 4)
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 19 Comparisons on the performance indexes J3and J5for different control cases (120575 = 6)
Acknowledgments
This research was supported by National Natural ScienceFoundation of China under Grant no 51308487 no 41402261and no 51408526 Hebei Provincial Natural Science Founda-tion ofChina underGrant no E2014203055 and the ExcellentYouth Foundation of Hebei Educational Committee underGrant no YQ2013015 The support for this research is greatlyappreciated
References
[1] C Alhan and H Gavin ldquoA parametric study of linear and non-linear passively damped seismic isolation systems for buildingsrdquoEngineering Structures vol 26 no 4 pp 485ndash497 2004
[2] R S Jangid and J M Kelly ldquoBase isolation for near-faultmotionsrdquoEarthquake Engineering and Structural Dynamics vol30 no 5 pp 691ndash707 2001
[3] J Shen M-H Tsai K-C Chang and G C Lee ldquoPerformanceof a seismically isolated bridge under near-fault earthquake
[4] F Mazza A Vulcano and M Mazza ldquoNonlinear dynamicresponse of RC buildings with different base Isolation systemssubjected to horizontal and vertical components of near-faultground motionsrdquo Open Construction and Building TechnologyJournal vol 6 pp 373ndash383 2012
[5] F Mazza and A Vulcano ldquoEffects of near-fault ground motionson the nonlinear dynamic response of base-isolated rc framedbuildingsrdquo Earthquake Engineering and Structural Dynamicsvol 41 no 2 pp 211ndash232 2012
[6] O E Ozbulut and S Hurlebaus ldquoFuzzy control of piezoelectricfriction dampers for seismic protection of smart base isolatedbuildingsrdquo Bulletin of Earthquake Engineering vol 8 no 6 pp1435ndash1455 2010
[7] O E Ozbulut M Bitaraf and S Hurlebaus ldquoAdaptive controlof base-isolated structures against near-field earthquakes usingvariable friction dampersrdquo Engineering Structures vol 33 no12 pp 3143ndash3154 2011
[8] J M Kelly ldquoThe role of damping in seismic isolationrdquo Earth-quake Engineering and Structural Dynamics vol 28 no 1 pp3ndash20 1999
[9] F Mazza and A Vulcano ldquoNonlinear response of RC framedbuildings with isolation and supplemental damping at the basesubjected to near-fault earthquakesrdquo Journal of EarthquakeEngineering vol 13 no 5 pp 690ndash715 2009
[10] M Bitaraf and S Hurlebaus ldquoSemi-active adaptive control ofseismically excited 20-story nonlinear buildingrdquo EngineeringStructures vol 56 no 11 pp 2107ndash2118 2013
[11] D Das T K Datta and A Madan ldquoSemiactive fuzzy controlof the seismic response of building frames with MR dampersrdquoEarthquake Engineering and Structural Dynamics vol 41 no 1pp 99ndash118 2012
[12] A-P Wang and C-D Lee ldquoFuzzy sliding mode control for abuilding structure based on genetic algorithmsrdquo EarthquakeEngineering and Structural Dynamics vol 31 no 4 pp 881ndash8952002
[13] D G Reigles and M D Symans ldquoSupervisory fuzzy controlof a base-isolated benchmark building utilizing a neuro-fuzzymodel of controllable fluid viscous dampersrdquo Structural Controland Health Monitoring vol 13 no 2-3 pp 724ndash747 2006
[14] H-S Kim and P N Roschke ldquoGA-fuzzy control of smartbase isolated benchmark building using supervisory controltechniquerdquo Advances in Engineering Software vol 38 no 7 pp453ndash465 2007
[15] D Yang and Y Zhao ldquoEffects of rupture forward directivity andfling step of near-fault groundmotions on seismic performanceof base-isolated building structurerdquo Acta Seismologica Sinicavol 32 no 5 pp 579ndash587 2010
[16] Y E-A Mohamedzein J A Abdalla and A Abdelwahab ldquoSiteresponse and earthquake design spectra for central KhartoumSudanrdquoBulletin of Earthquake Engineering vol 4 no 3 pp 277ndash293 2006
[17] D Zhao and H Li ldquoShaking table tests and analyses of semi-active fuzzy control for structural seismic reduction with apiezoelectric variable-friction damperrdquo Smart Materials andStructures vol 19 no 10 Article ID 105031 2010
[18] W L He A K Agrawal and J N Yang ldquoNovel semiactivefriction controller for linear structures against earthquakesrdquoJournal of Structural Engineering vol 129 no 7 pp 941ndash9502003
[19] J N Yang and A K Agrawal ldquoSemi-active hybrid controlsystems for nonlinear buildings against near-field earthquakesrdquoEngineering Structures vol 24 no 3 pp 271ndash280 2002
[20] O E Ozbulut and S Hurlebaus ldquoOptimal design of supere-lastic-friction base isolators for seismic protection of highwaybridges against near-field earthquakesrdquo Earthquake Engineeringand Structural Dynamics vol 40 no 3 pp 273ndash291 2011
[21] D A Shook P N Roschke and O E Ozbulut ldquoSuperelasticsemi-active damping of a base-isolated structurerdquo StructuralControl and HealthMonitoring vol 15 no 5 pp 746ndash768 2008
[22] K D PhamG JinM K Sain B F Spencer Jr and S R LibertyldquoGeneralized linear quadratic Gaussian techniques for the windbenchmark problemrdquo Journal of Engineering Mechanics vol130 no 4 pp 466ndash470 2004
[23] S Nagarajaiah and S Narasimhan ldquoSmart base-isolated bench-mark building Part II Phase I sample controllers for linearisolation systemsrdquo Structural Control and Health Monitoringvol 13 no 2-3 pp 605ndash625 2006
J 3 J 5Figure 18 Comparisons on the performance indexes J
3and J5for different control cases (120575 = 4)
1 2 3 4 5 6 7 8 903
04
05
06
07
08
Excitation casePassive
GHFLC Optimal
1 2 3 4 5 6 7 8 907
08
09
10
11
12
13
14
15
Excitation casePassive
GHFLC Optimal
J 3 J 5
Figure 19 Comparisons on the performance indexes J3and J5for different control cases (120575 = 6)
Acknowledgments
This research was supported by National Natural ScienceFoundation of China under Grant no 51308487 no 41402261and no 51408526 Hebei Provincial Natural Science Founda-tion ofChina underGrant no E2014203055 and the ExcellentYouth Foundation of Hebei Educational Committee underGrant no YQ2013015 The support for this research is greatlyappreciated
References
[1] C Alhan and H Gavin ldquoA parametric study of linear and non-linear passively damped seismic isolation systems for buildingsrdquoEngineering Structures vol 26 no 4 pp 485ndash497 2004
[2] R S Jangid and J M Kelly ldquoBase isolation for near-faultmotionsrdquoEarthquake Engineering and Structural Dynamics vol30 no 5 pp 691ndash707 2001
[3] J Shen M-H Tsai K-C Chang and G C Lee ldquoPerformanceof a seismically isolated bridge under near-fault earthquake
[4] F Mazza A Vulcano and M Mazza ldquoNonlinear dynamicresponse of RC buildings with different base Isolation systemssubjected to horizontal and vertical components of near-faultground motionsrdquo Open Construction and Building TechnologyJournal vol 6 pp 373ndash383 2012
[5] F Mazza and A Vulcano ldquoEffects of near-fault ground motionson the nonlinear dynamic response of base-isolated rc framedbuildingsrdquo Earthquake Engineering and Structural Dynamicsvol 41 no 2 pp 211ndash232 2012
[6] O E Ozbulut and S Hurlebaus ldquoFuzzy control of piezoelectricfriction dampers for seismic protection of smart base isolatedbuildingsrdquo Bulletin of Earthquake Engineering vol 8 no 6 pp1435ndash1455 2010
[7] O E Ozbulut M Bitaraf and S Hurlebaus ldquoAdaptive controlof base-isolated structures against near-field earthquakes usingvariable friction dampersrdquo Engineering Structures vol 33 no12 pp 3143ndash3154 2011
[8] J M Kelly ldquoThe role of damping in seismic isolationrdquo Earth-quake Engineering and Structural Dynamics vol 28 no 1 pp3ndash20 1999
[9] F Mazza and A Vulcano ldquoNonlinear response of RC framedbuildings with isolation and supplemental damping at the basesubjected to near-fault earthquakesrdquo Journal of EarthquakeEngineering vol 13 no 5 pp 690ndash715 2009
[10] M Bitaraf and S Hurlebaus ldquoSemi-active adaptive control ofseismically excited 20-story nonlinear buildingrdquo EngineeringStructures vol 56 no 11 pp 2107ndash2118 2013
[11] D Das T K Datta and A Madan ldquoSemiactive fuzzy controlof the seismic response of building frames with MR dampersrdquoEarthquake Engineering and Structural Dynamics vol 41 no 1pp 99ndash118 2012
[12] A-P Wang and C-D Lee ldquoFuzzy sliding mode control for abuilding structure based on genetic algorithmsrdquo EarthquakeEngineering and Structural Dynamics vol 31 no 4 pp 881ndash8952002
[13] D G Reigles and M D Symans ldquoSupervisory fuzzy controlof a base-isolated benchmark building utilizing a neuro-fuzzymodel of controllable fluid viscous dampersrdquo Structural Controland Health Monitoring vol 13 no 2-3 pp 724ndash747 2006
[14] H-S Kim and P N Roschke ldquoGA-fuzzy control of smartbase isolated benchmark building using supervisory controltechniquerdquo Advances in Engineering Software vol 38 no 7 pp453ndash465 2007
[15] D Yang and Y Zhao ldquoEffects of rupture forward directivity andfling step of near-fault groundmotions on seismic performanceof base-isolated building structurerdquo Acta Seismologica Sinicavol 32 no 5 pp 579ndash587 2010
[16] Y E-A Mohamedzein J A Abdalla and A Abdelwahab ldquoSiteresponse and earthquake design spectra for central KhartoumSudanrdquoBulletin of Earthquake Engineering vol 4 no 3 pp 277ndash293 2006
[17] D Zhao and H Li ldquoShaking table tests and analyses of semi-active fuzzy control for structural seismic reduction with apiezoelectric variable-friction damperrdquo Smart Materials andStructures vol 19 no 10 Article ID 105031 2010
[18] W L He A K Agrawal and J N Yang ldquoNovel semiactivefriction controller for linear structures against earthquakesrdquoJournal of Structural Engineering vol 129 no 7 pp 941ndash9502003
[19] J N Yang and A K Agrawal ldquoSemi-active hybrid controlsystems for nonlinear buildings against near-field earthquakesrdquoEngineering Structures vol 24 no 3 pp 271ndash280 2002
[20] O E Ozbulut and S Hurlebaus ldquoOptimal design of supere-lastic-friction base isolators for seismic protection of highwaybridges against near-field earthquakesrdquo Earthquake Engineeringand Structural Dynamics vol 40 no 3 pp 273ndash291 2011
[21] D A Shook P N Roschke and O E Ozbulut ldquoSuperelasticsemi-active damping of a base-isolated structurerdquo StructuralControl and HealthMonitoring vol 15 no 5 pp 746ndash768 2008
[22] K D PhamG JinM K Sain B F Spencer Jr and S R LibertyldquoGeneralized linear quadratic Gaussian techniques for the windbenchmark problemrdquo Journal of Engineering Mechanics vol130 no 4 pp 466ndash470 2004
[23] S Nagarajaiah and S Narasimhan ldquoSmart base-isolated bench-mark building Part II Phase I sample controllers for linearisolation systemsrdquo Structural Control and Health Monitoringvol 13 no 2-3 pp 605ndash625 2006
[4] F Mazza A Vulcano and M Mazza ldquoNonlinear dynamicresponse of RC buildings with different base Isolation systemssubjected to horizontal and vertical components of near-faultground motionsrdquo Open Construction and Building TechnologyJournal vol 6 pp 373ndash383 2012
[5] F Mazza and A Vulcano ldquoEffects of near-fault ground motionson the nonlinear dynamic response of base-isolated rc framedbuildingsrdquo Earthquake Engineering and Structural Dynamicsvol 41 no 2 pp 211ndash232 2012
[6] O E Ozbulut and S Hurlebaus ldquoFuzzy control of piezoelectricfriction dampers for seismic protection of smart base isolatedbuildingsrdquo Bulletin of Earthquake Engineering vol 8 no 6 pp1435ndash1455 2010
[7] O E Ozbulut M Bitaraf and S Hurlebaus ldquoAdaptive controlof base-isolated structures against near-field earthquakes usingvariable friction dampersrdquo Engineering Structures vol 33 no12 pp 3143ndash3154 2011
[8] J M Kelly ldquoThe role of damping in seismic isolationrdquo Earth-quake Engineering and Structural Dynamics vol 28 no 1 pp3ndash20 1999
[9] F Mazza and A Vulcano ldquoNonlinear response of RC framedbuildings with isolation and supplemental damping at the basesubjected to near-fault earthquakesrdquo Journal of EarthquakeEngineering vol 13 no 5 pp 690ndash715 2009
[10] M Bitaraf and S Hurlebaus ldquoSemi-active adaptive control ofseismically excited 20-story nonlinear buildingrdquo EngineeringStructures vol 56 no 11 pp 2107ndash2118 2013
[11] D Das T K Datta and A Madan ldquoSemiactive fuzzy controlof the seismic response of building frames with MR dampersrdquoEarthquake Engineering and Structural Dynamics vol 41 no 1pp 99ndash118 2012
[12] A-P Wang and C-D Lee ldquoFuzzy sliding mode control for abuilding structure based on genetic algorithmsrdquo EarthquakeEngineering and Structural Dynamics vol 31 no 4 pp 881ndash8952002
[13] D G Reigles and M D Symans ldquoSupervisory fuzzy controlof a base-isolated benchmark building utilizing a neuro-fuzzymodel of controllable fluid viscous dampersrdquo Structural Controland Health Monitoring vol 13 no 2-3 pp 724ndash747 2006
[14] H-S Kim and P N Roschke ldquoGA-fuzzy control of smartbase isolated benchmark building using supervisory controltechniquerdquo Advances in Engineering Software vol 38 no 7 pp453ndash465 2007
[15] D Yang and Y Zhao ldquoEffects of rupture forward directivity andfling step of near-fault groundmotions on seismic performanceof base-isolated building structurerdquo Acta Seismologica Sinicavol 32 no 5 pp 579ndash587 2010
[16] Y E-A Mohamedzein J A Abdalla and A Abdelwahab ldquoSiteresponse and earthquake design spectra for central KhartoumSudanrdquoBulletin of Earthquake Engineering vol 4 no 3 pp 277ndash293 2006
[17] D Zhao and H Li ldquoShaking table tests and analyses of semi-active fuzzy control for structural seismic reduction with apiezoelectric variable-friction damperrdquo Smart Materials andStructures vol 19 no 10 Article ID 105031 2010
[18] W L He A K Agrawal and J N Yang ldquoNovel semiactivefriction controller for linear structures against earthquakesrdquoJournal of Structural Engineering vol 129 no 7 pp 941ndash9502003
[19] J N Yang and A K Agrawal ldquoSemi-active hybrid controlsystems for nonlinear buildings against near-field earthquakesrdquoEngineering Structures vol 24 no 3 pp 271ndash280 2002
[20] O E Ozbulut and S Hurlebaus ldquoOptimal design of supere-lastic-friction base isolators for seismic protection of highwaybridges against near-field earthquakesrdquo Earthquake Engineeringand Structural Dynamics vol 40 no 3 pp 273ndash291 2011
[21] D A Shook P N Roschke and O E Ozbulut ldquoSuperelasticsemi-active damping of a base-isolated structurerdquo StructuralControl and HealthMonitoring vol 15 no 5 pp 746ndash768 2008
[22] K D PhamG JinM K Sain B F Spencer Jr and S R LibertyldquoGeneralized linear quadratic Gaussian techniques for the windbenchmark problemrdquo Journal of Engineering Mechanics vol130 no 4 pp 466ndash470 2004
[23] S Nagarajaiah and S Narasimhan ldquoSmart base-isolated bench-mark building Part II Phase I sample controllers for linearisolation systemsrdquo Structural Control and Health Monitoringvol 13 no 2-3 pp 605ndash625 2006

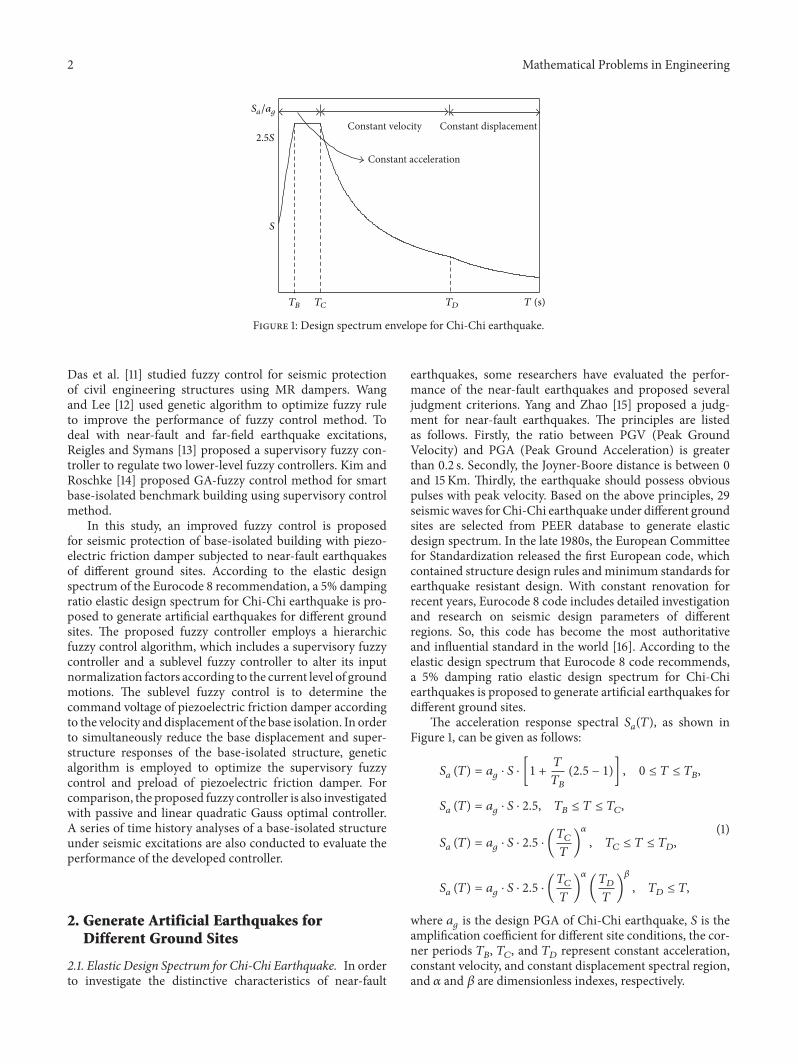
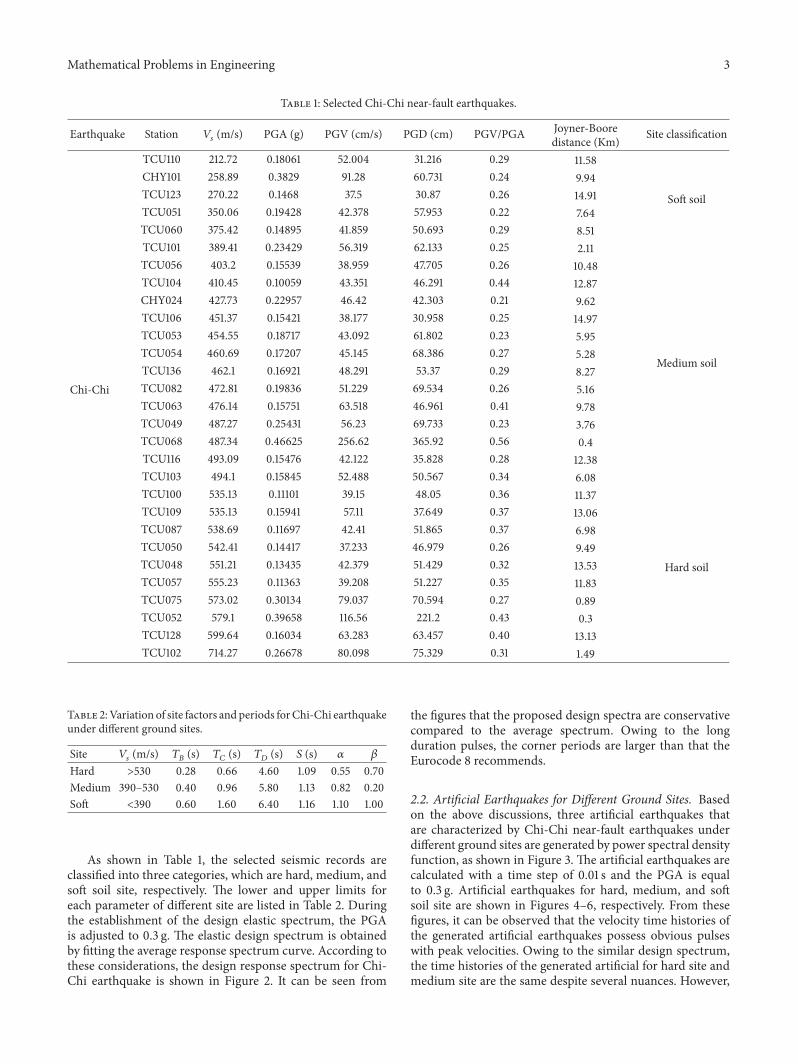
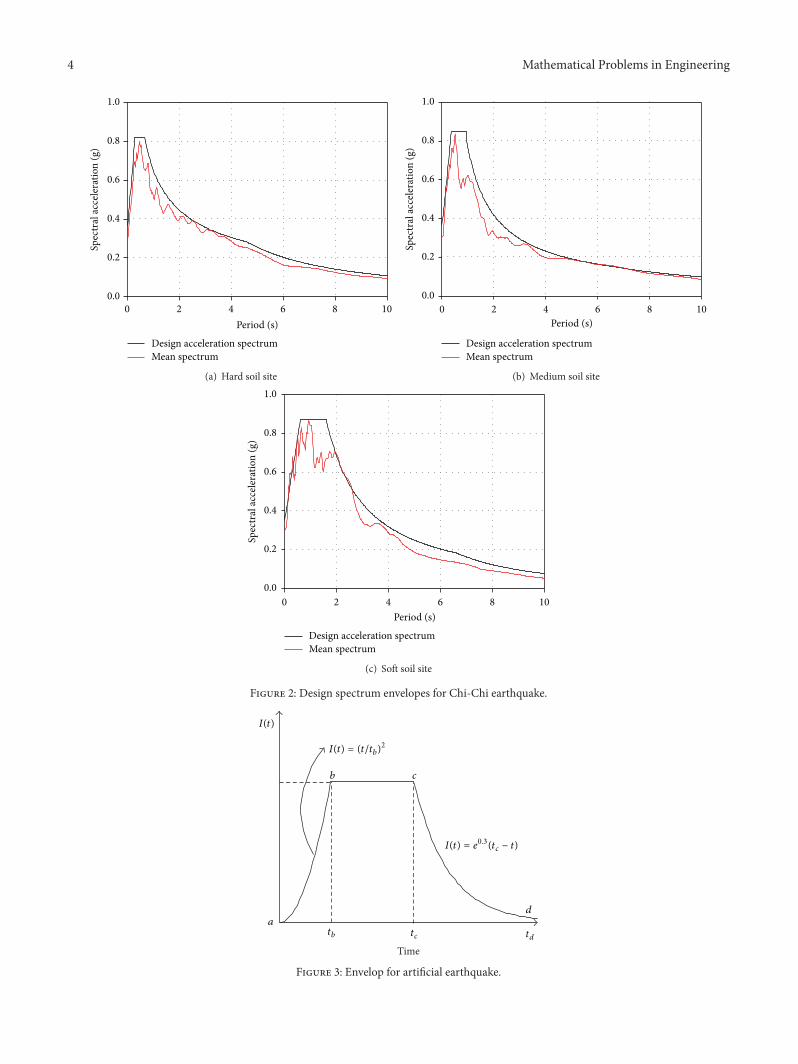
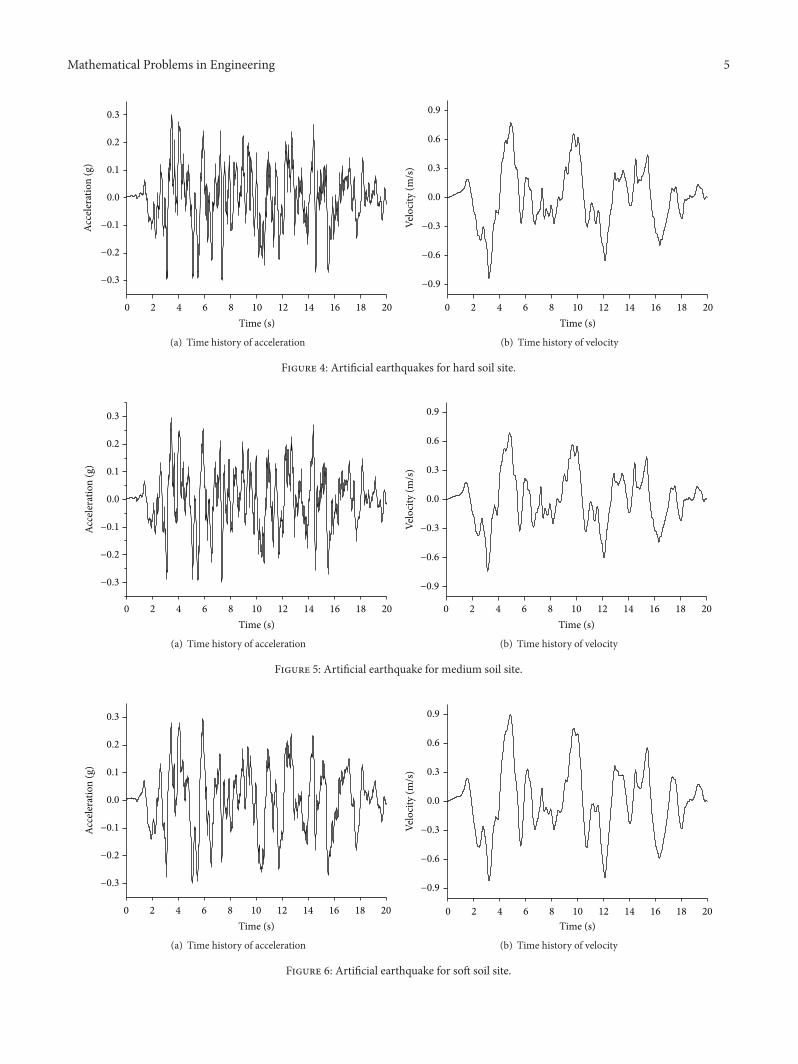

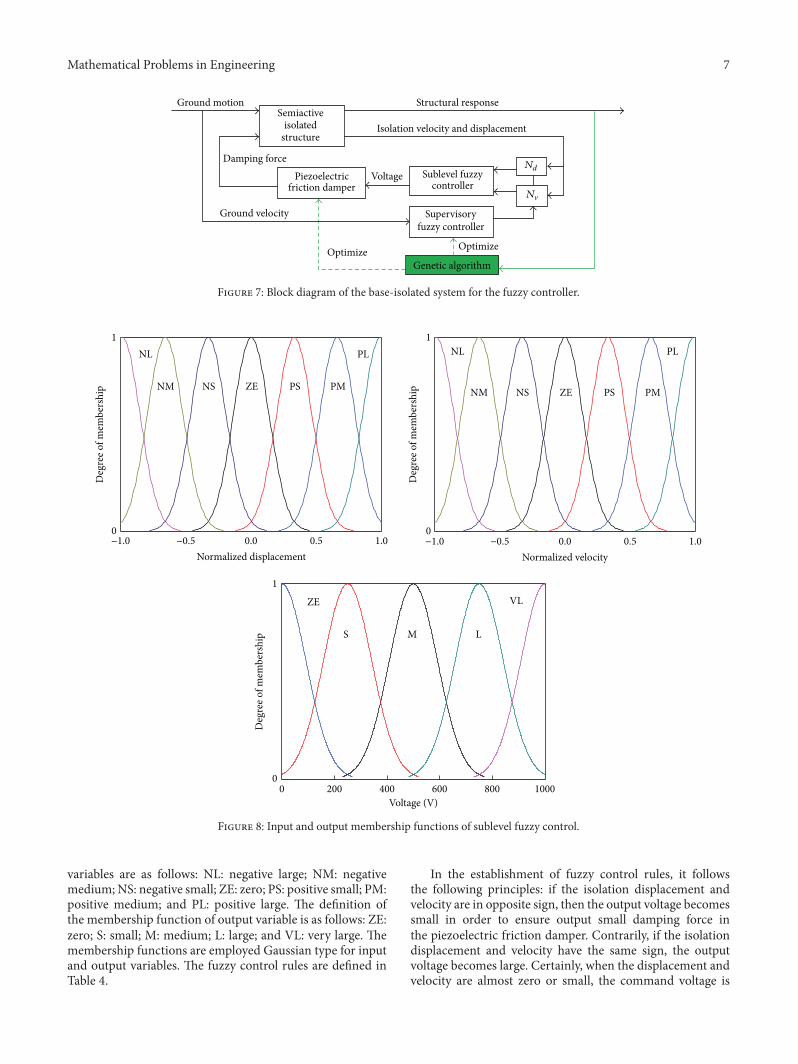
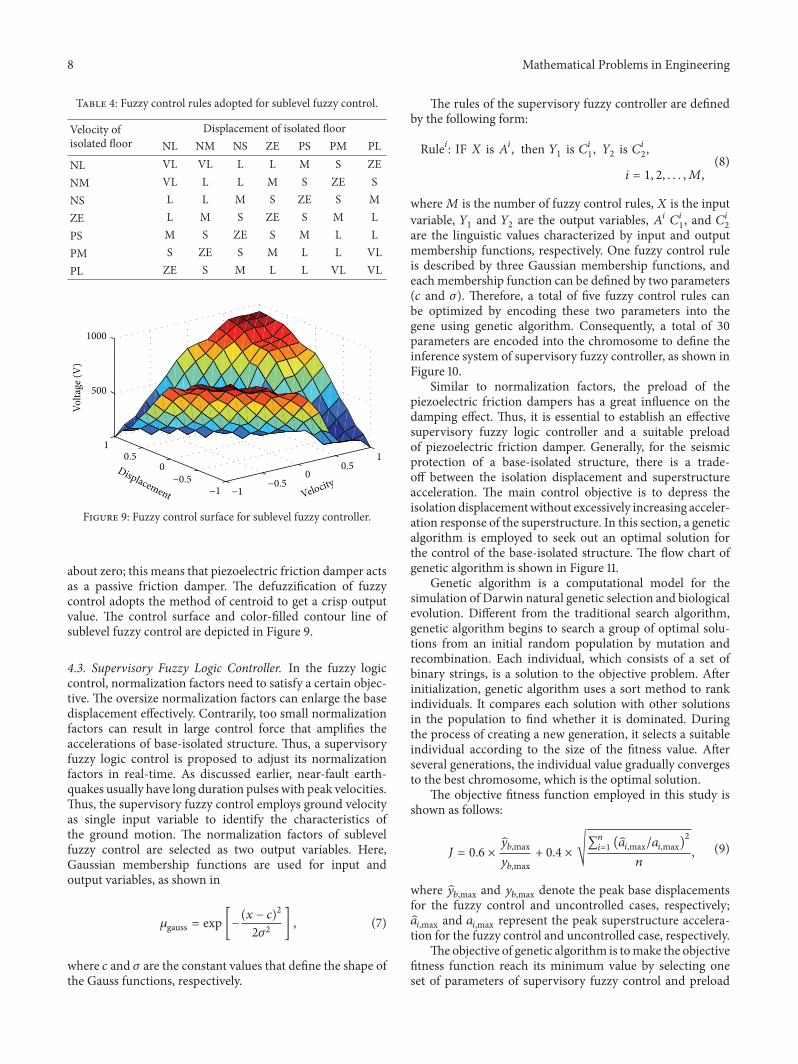
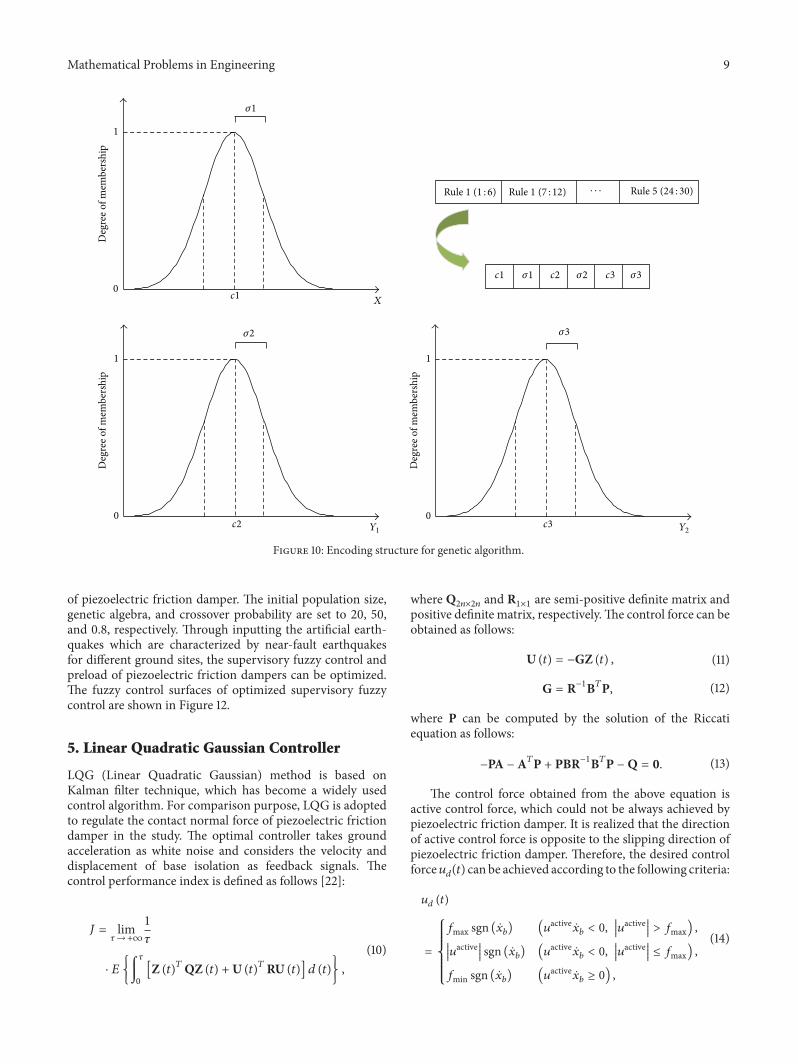
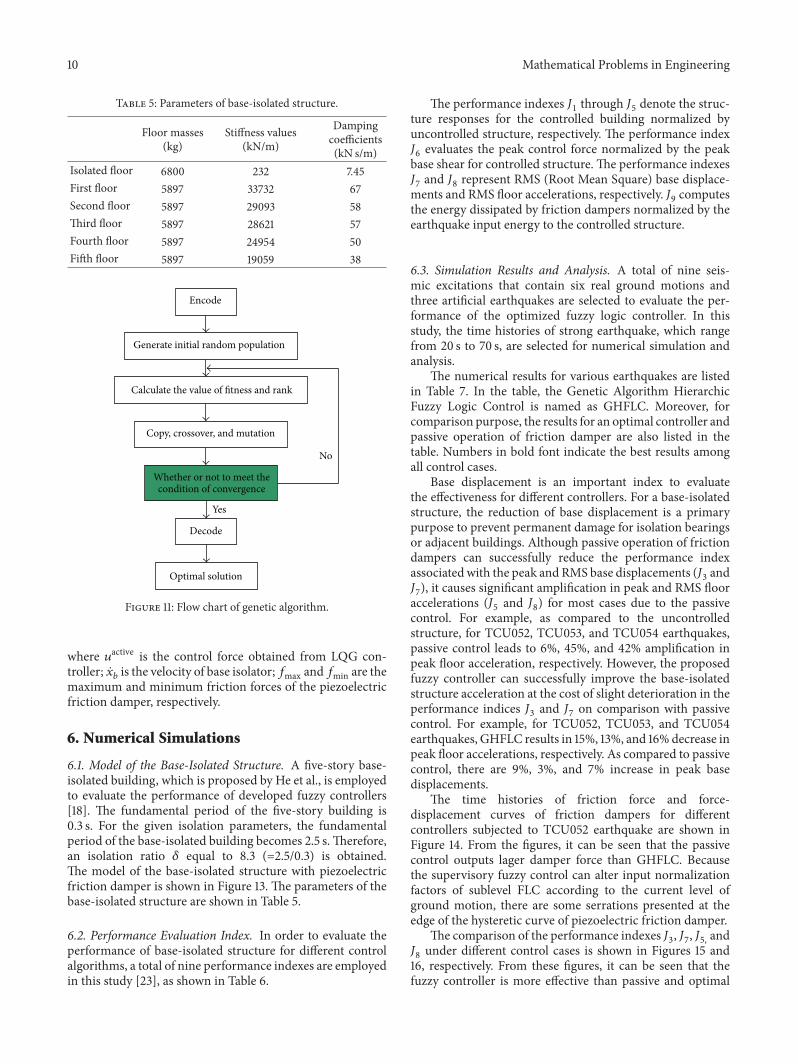
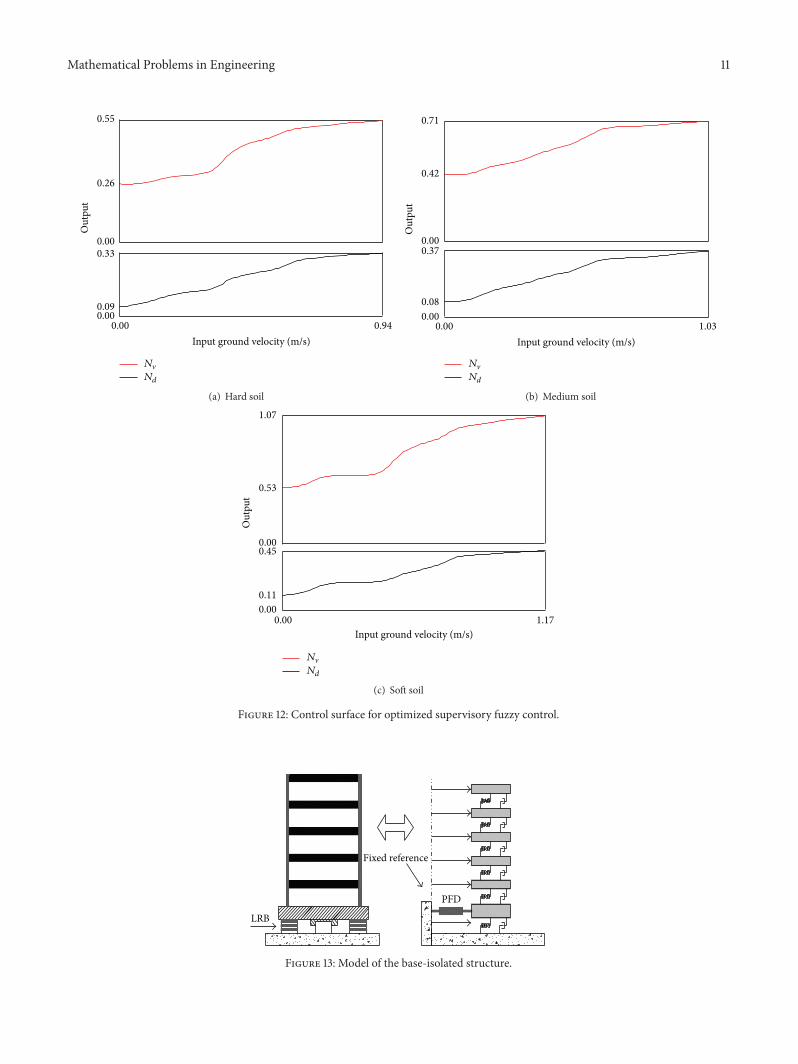
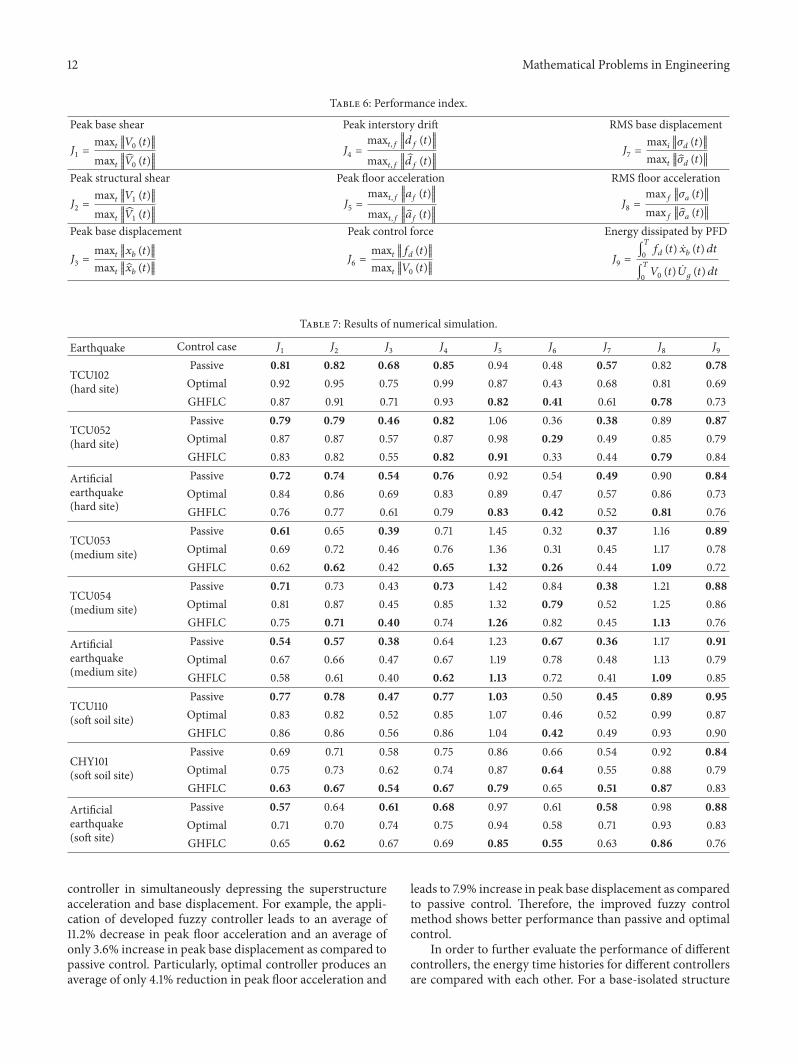
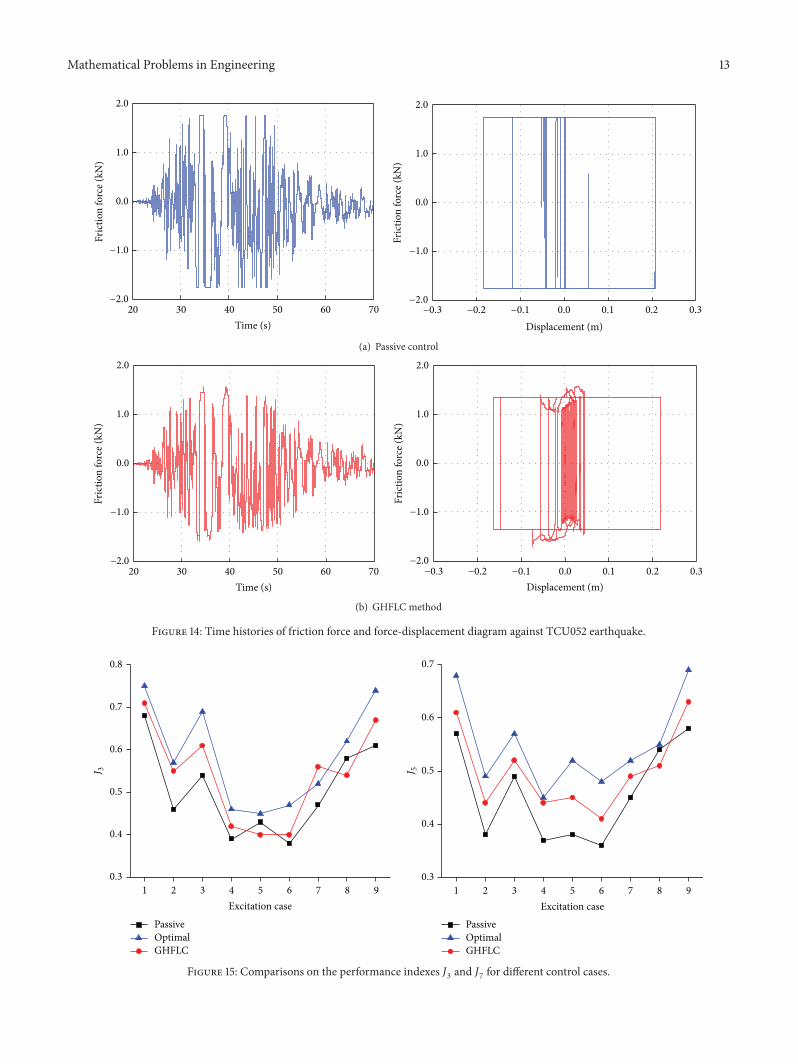
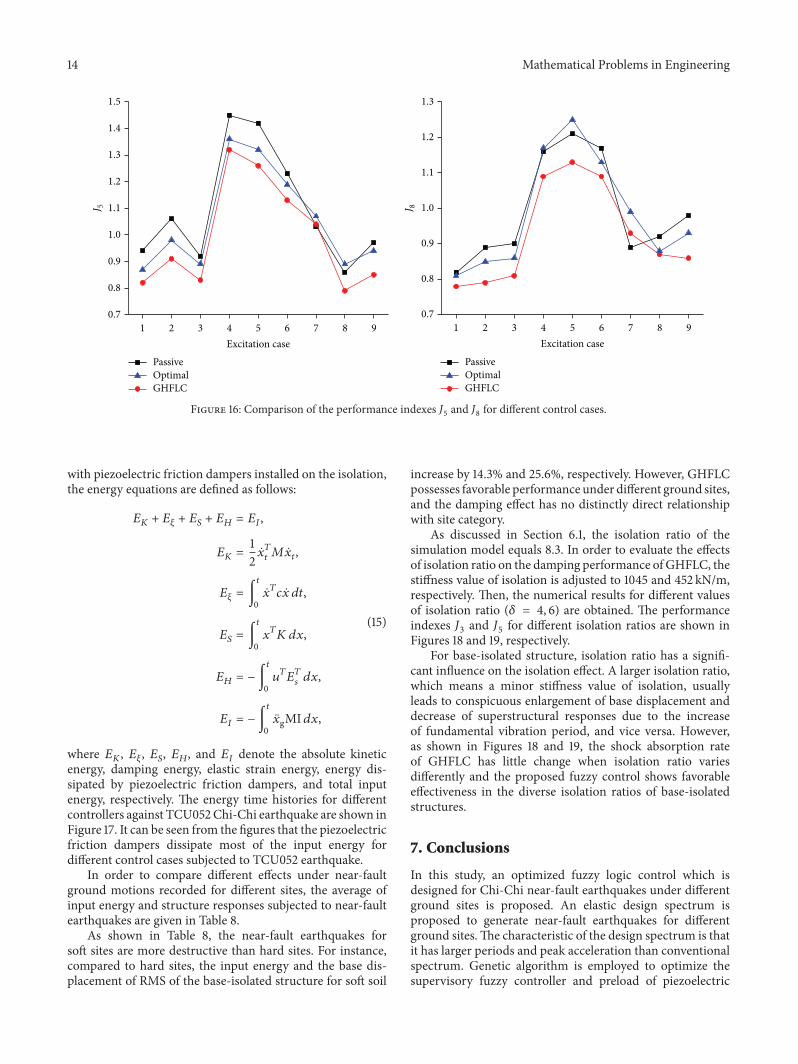
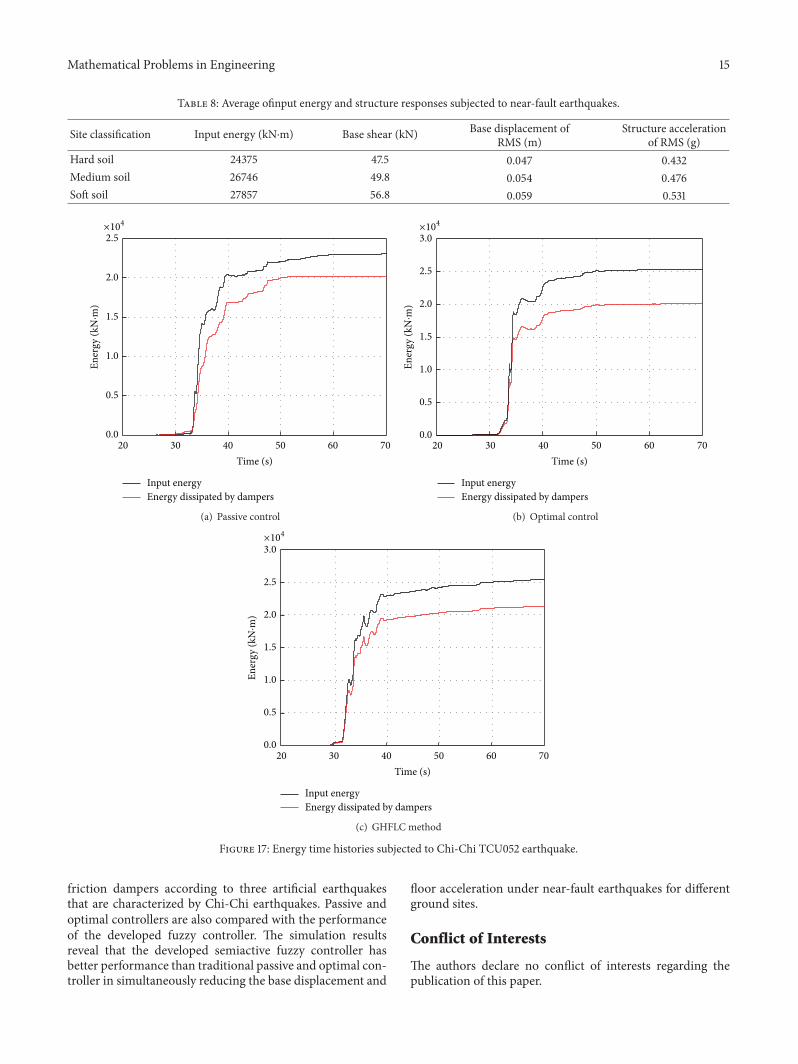
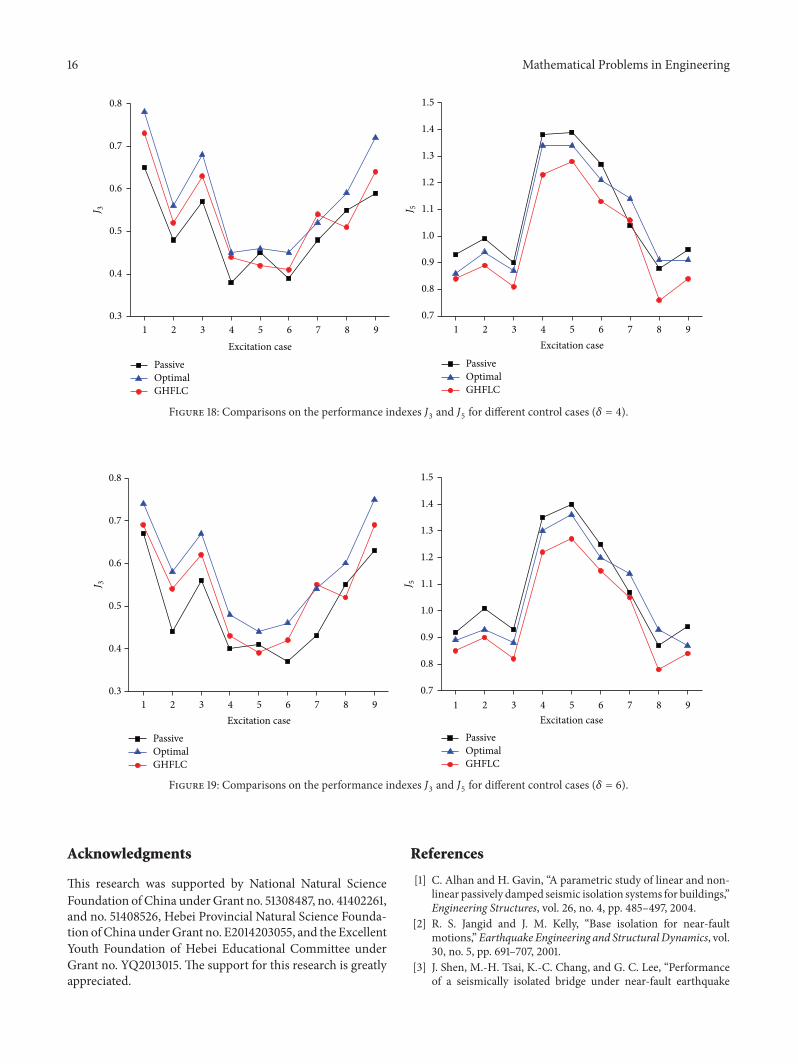
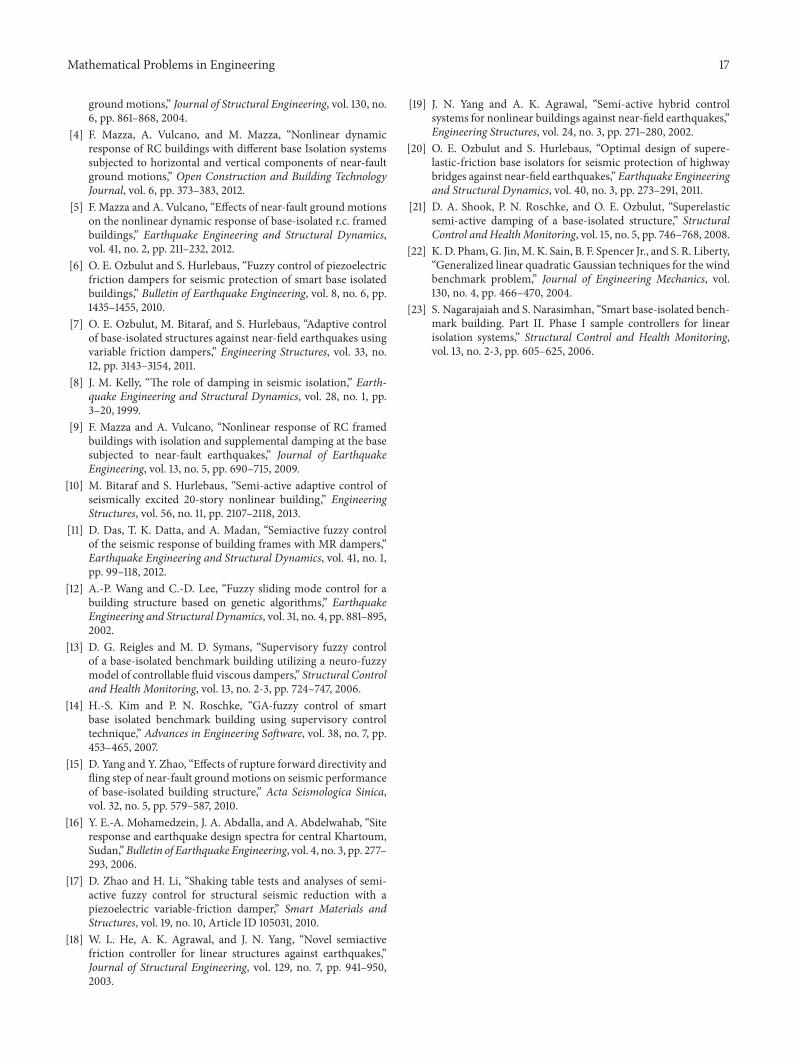














![Chapter 3: Fuzzy Rules & Fuzzy Reasoning513].pdf · CH. 3: Fuzzy rules & fuzzy reasoning 1 Chapter 3: Fuzzy Rules & Fuzzy Reasoning ... Application of the extension principle to fuzzy](https://static.documents.pub/doc/80x56/5b3ed7b37f8b9a3a138b5aa0/chapter-3-fuzzy-rules-fuzzy-513pdf-ch-3-fuzzy-rules-fuzzy-reasoning.jpg)


