Problem illustrations of Radar systemsProblem illustrations of Radar systems– Basic Radar modelBasic Radar model– Tasks with Harmonic PeriodsTasks with Harmonic Periods– Offline Template GenerationOffline Template Generation– Schedule construction on HyperperiodSchedule construction on Hyperperiod
The traditional notion of real-time systemsThe traditional notion of real-time systems
0 T1 2T1
3T1
0 T2 2T2
3T2
4T2
TASK 1
TASK 2
Periodic tasks Known periodsKnown execution timesKnown deadlines
However, many important applications lack this simple However, many important applications lack this simple structurestructure
Complexity arises because ofComplexity arises because of– Stringent task requirementsStringent task requirements– Scale of systemsScale of systems
Presentation outlinePresentation outline
MotivationMotivation
Problem illustrations of Radar systemsProblem illustrations of Radar systems– Basic Radar modelBasic Radar model– Tasks with Harmonic PeriodsTasks with Harmonic Periods– Offline Template GenerationOffline Template Generation– Schedule construction on HyperperiodSchedule construction on Hyperperiod
Processing requirements for radar Processing requirements for radar taskstasks
Signals received at the antenna need to be processed Signals received at the antenna need to be processed (backend computations)(backend computations)– At multiple stagesAt multiple stages– Within an end-to-end deadlineWithin an end-to-end deadline
FILTERING CLASSIFICATIONCOMMAND
GENERATION
End-to-end deadline
Execution requirements on each node
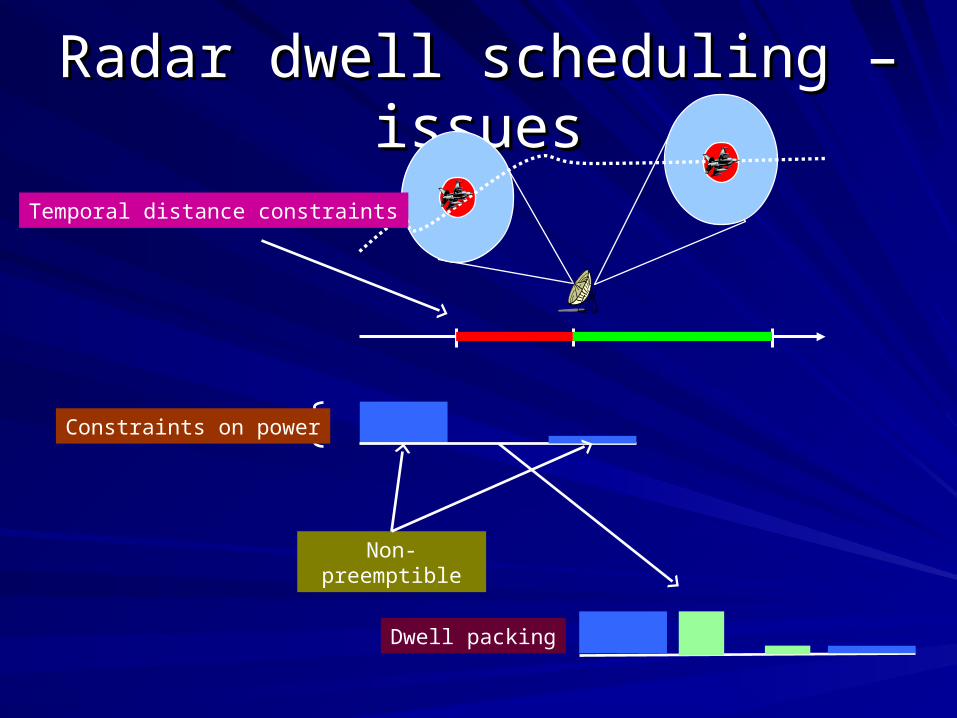
Radar dwell schedulingRadar dwell scheduling
Nth job
(N+1)th job
Illumination windowLast
illumination time
Temporal distance
Processing window
Radar dwell schedulingRadar dwell scheduling
Non-preemptible
Reusable
Radar dwell
Question: How do we schedule many such tasks?
Constraints on power
Dwell packing
Power (kw)
t
P(t)τxt
e
Template-based ScheduleTemplate-based Schedule
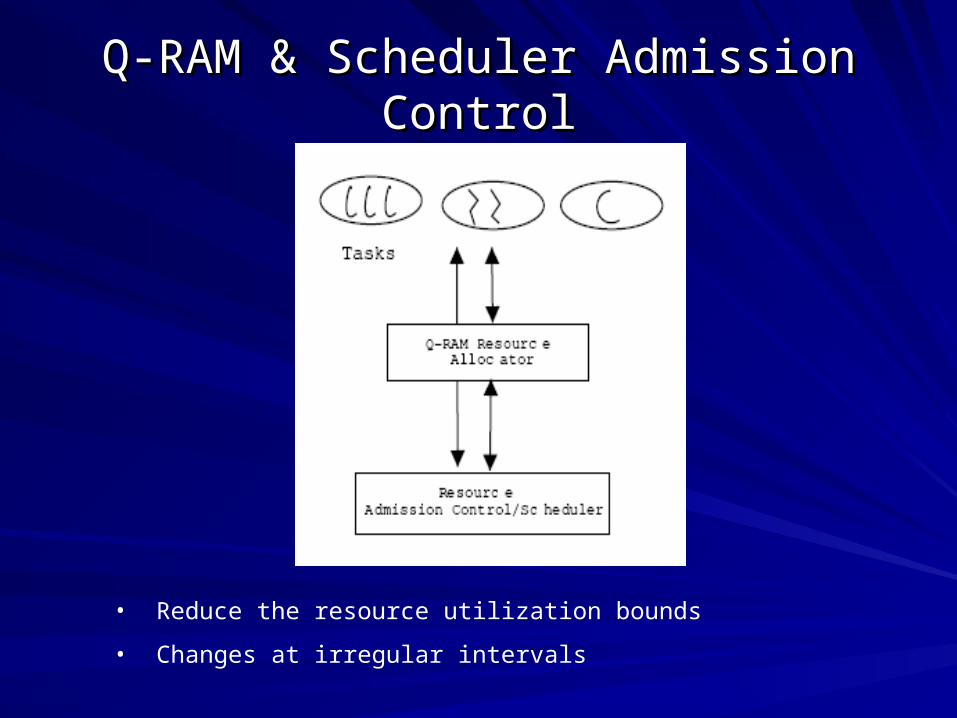
Q-RAM & Scheduler Admission ControlQ-RAM & Scheduler Admission Control
task types were restricted to a finite settask types were restricted to a finite set
appropriate templates were chosen during online appropriate templates were chosen during online operationoperation
Resource managers could only pick task types from Resource managers could only pick task types from the finite set.the finite set.
Presentation outlinePresentation outline
MotivationMotivation
Problem illustrations of Radar systemsProblem illustrations of Radar systems– Basic Radar modelBasic Radar model– Tasks with Harmonic PeriodsTasks with Harmonic Periods– Offline Template GenerationOffline Template Generation– Schedule construction on HyperperiodSchedule construction on Hyperperiod
arbitrary task types can be combined on-the-fly to arbitrary task types can be combined on-the-fly to produce a template; produce a template;
provides greater freedom to a resource manager. provides greater freedom to a resource manager.
The resource manager can tune the parameters of each The resource manager can tune the parameters of each task with finer granularity. task with finer granularity.
Online template generation is carried out using a fast Online template generation is carried out using a fast heuristic based on task characteristics.heuristic based on task characteristics.
Fixed length templates for packing dwellsHeuristics for building templates
Template length divides the smallest period
Temporal distance
Synthetic period
Feasible intervals
Modular Schedule UpdatesModular Schedule Updates
Without modular schedule update
With modular schedule update
ConstraintsConstraints
Temporal ConstraintsTemporal ConstraintsWhen new tasks are admitted, the schedule changes only within the When new tasks are admitted, the schedule changes only within the templates in which new jobs are inserted. templates in which new jobs are inserted.
Energy ConstraintsEnergy Constraints Since a job is inserted into a template only if it will not cause the energy Since a job is inserted into a template only if it will not cause the energy
level to exceed level to exceed ETHETH, and since job insertions assume that the energy level , and since job insertions assume that the energy level at the start of a template is at the start of a template is ETHETH, job insertions are guaranteed to be safe in , job insertions are guaranteed to be safe in terms of the energy constraint. terms of the energy constraint.
Dealing with the energy Dealing with the energy constraintconstraint
Problem illustrations of Radar systemsProblem illustrations of Radar systems– Basic Radar modelBasic Radar model– Tasks with Harmonic PeriodsTasks with Harmonic Periods– Offline Template GenerationOffline Template Generation– Schedule construction on HyperperiodSchedule construction on Hyperperiod
All Real time systems doesn’t follow Ideal modelAll Real time systems doesn’t follow Ideal model
Determination of Schedulability RegionsDetermination of Schedulability Regions
Knowing the Schedule not just the schedulabilityKnowing the Schedule not just the schedulability
Systems should be able to handle unseen tasks, Systems should be able to handle unseen tasks, without violating the Temporal and Energy without violating the Temporal and Energy constraintsconstraints
ReferencesReferences[1] C.-S. Shih, S. Gopalakrishnan, P. Ganti, M. Caccamo, L. Sha: “Template-
based real-time dwell scheduling with energy constraint,” IEEE Real-Time Technology and Applications Symposium, Washington D.C., USA, May 2003.
[2] C.-S. Shih, S. Gopalakrishnan, P. Ganti, M. Caccamo, L.Sha: “Scheduling real-time dwells using tasks withsynthetic periods,” IEEE Real-Time Systems Symposium, Cancun, Mexico, December 2003.
[3] C.-G. Lee, P.-S. Kang, C.-S. Shih, L. Sha: “Radar dwell scheduling considering physical characteristics of phased array antenna,” IEEE Real-Time Systems Symposium,Cancun, Mexico, December 2003.
[4] J. Hansen, S. Ghosh, R. Rajkumar, J. Lehoczky: “Resource management of highly configurable tasks,” Workshop on Parallel and Distributed Real-Time Systems, Santa Fe, USA, April 2004.
References Contd..References Contd..
[5] MURI on QoS in Surveillance and Control Radar Dwell Scheduling for Phased-Array Radars PIs Lui Sha Marco Caccamo Chang-Gun Lee
[6] GOPALAKRISHNAN, S. Resource Management for Real-Time Environments. PhD thesis, University of Illinois, Urbana, Illinois, Dec. 2005.
[7] GOPALAKRISHNAN, S., CACCAMO, M., SHIH, C.-S., SHA, L., AND LEE, C.-G. Finite horizon scheduling of radar dwells with online template construction. Real-Time Systems (2006).