40
Playing with LEGO Mindstorms from your Mobile Phone @robert_virkus

Playing with
LEGO
Mindstorms
from your
Mobile Phone
@robert_virkus

Mindstorms!
Mobile!
Madness !

A toy!








Beams
frame
angled
straight

Connectorspins
axles
axle, pin and
angle connectors

Crossblocks

Gears


1
23
4
A
BC
D
sensors
motors
USB to another intelligent block
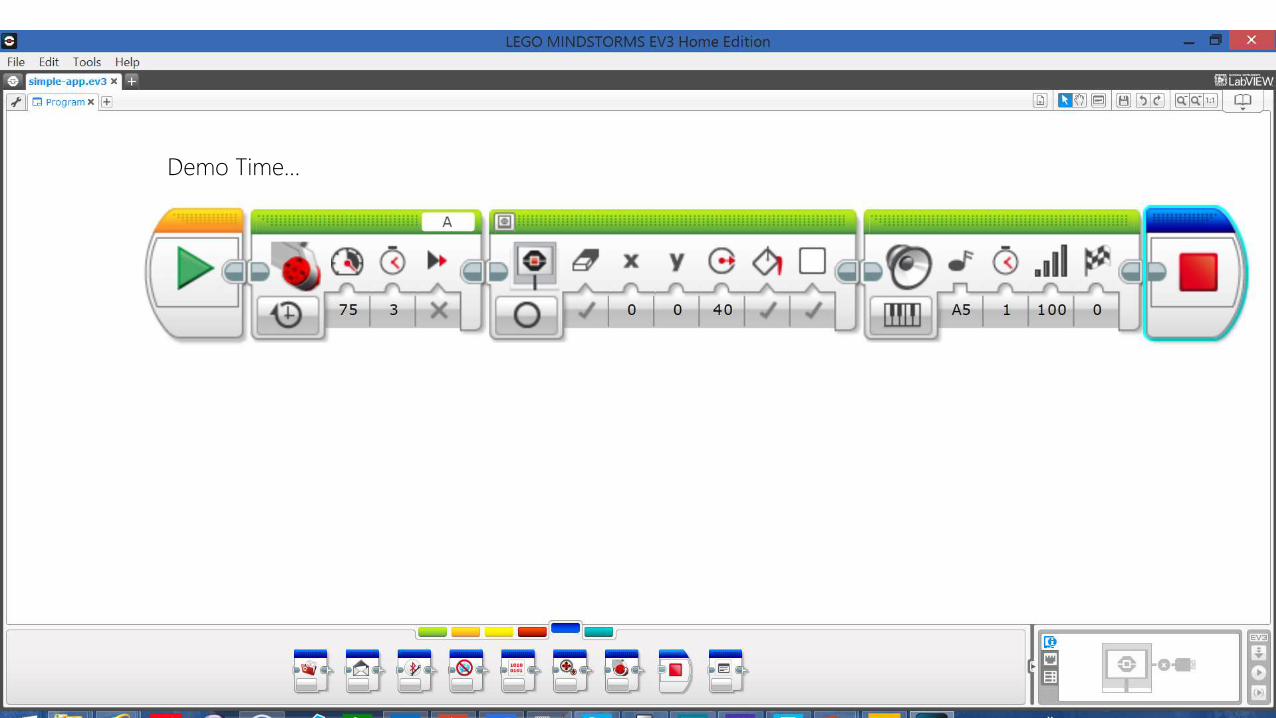
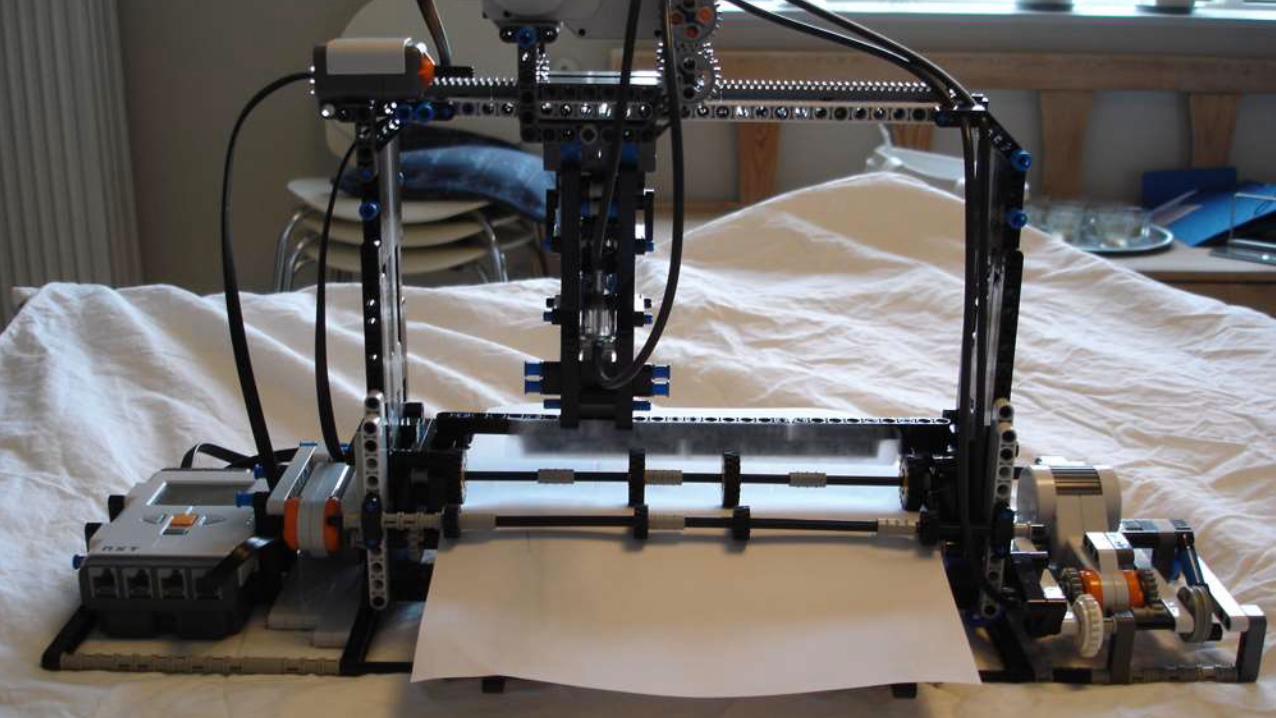
Demo Time…

Mobile!


legoev3.codeplex.com
Demo time!

Don’t forget to pair your Mindstorms robot first!
legoev3.codeplex.com Connecting
public async Task ConnectAsync(){
Brick brick = new Brick(new BluetoothCommunication() );await Brick.ConnectAsync();IsConnected = true;
}

legoev3.codeplex.com Direct Commands
public async Task CloseClawsAsync(){
await EnsureIsConnectedAsync();await Brick.DirectCommand.TurnMotorAtPowerAsync(OutputPort.A, 10);
}

legoev3.codeplex.com Batch Commands
public async Task MoveAsync(int leftPower, int rightPower){
await EnsureIsConnectedAsync();Brick.BatchCommand.TurnMotorAtPower(OutputPort.B, leftPower);Brick.BatchCommand.TurnMotorAtPower(OutputPort.C, rightPower);await Brick.BatchCommand.SendCommandAsync();
}

legoev3.codeplex.com Sensor Reading
Brick.BrickChanged += Brick_BrickChanged;
private async void Brick_BrickChanged(object sender, BrickChangedEventArgs e){
if (e.Ports[InputPort.One].SIValue == 1|| e.Ports[InputPort.Two].SIValue == 1){
await Brick.DirectCommand.StopMotorAsync(OutputPort.B | OutputPort.C, true);
}}

legoev3.codeplex.com Sensor Configuration
Brick.Ports[InputPort.One].SetMode(TouchMode.Bumps);await Brick.DirectCommand.ClearChanges(InputPort.One);

legoev3.codeplex.com System Commands
await Brick.SystemCommand.CopyFileAsync("\\devconfu.rsf", "../prjs/Tester/dev.rsf");

turtlesnapp3r.codeplex.com making it prettier


works on
Android (using Xamarin.com)
Windows Phone
Windows
Linux
Mac OS X

do it yourself
0 1
2 bytes
Payload
Size
2 3 4 5
2 bytes
Sequence
1 byte
Cmd
Type
2 bytes
local and
global size
(direct
commands)
6 7 8
1 byte or 2 bytes
Command code
and possibly
sub-command
9…
Command-specific payload

Madness !

http://www.wired.co.uk/magazine/archive/2012/07/start/playful-prototyping


dexterindustries.com/BrickPi.html

Original Linux source code
github.com/mindboards/ev3sources
C programming
robotc.net/download/lego/
.NET programming
monobrick.dk/software/ev3firmware/
Firmwares
Java programming
lejos.org

about me…

2005
-4,600 M
Earth forms
-3,500 M
Life forms
-2,000 M
Complex life forms
-225 until -65 M
Age of dinosaurs
-3 M
Stone age

Download it at
enough.de/mdgg

@enoughsoftware
@robert_virkus














