15
RoboCam Team: Andrew Delgado, Jordan Espinosa, Vicente Leyba, Sarah Gonzalez Sponsors: UNM ARTS Lab David Beining Joe Kniss Consultant: April Suknot
| Date post: | 15-Dec-2015 |
| Category: |
Documents |
| Upload: | amani-vardell |
| View: | 215 times |
| Download: | 2 times |
RoboCam
Team:
Andrew Delgado, Jordan Espinosa, Vicente Leyba, Sarah Gonzalez
Sponsors:
UNM ARTS Lab
David Beining
Joe Kniss
Consultant:
April Suknot

Project Description
RoboCam will sense the location and orientation of the projectors, then determine and make the necessary calibrations

Ultimate Goals
• Software/Hardware platform used for automatic projector calibration
• Siggraph 2012
Deliverables
• Robotic Camera Mount (pitch & yaw)
• Software to calculate calibrations
• Android Application
• Documentation/Site: https://sites.google.com/site/ecerobocam
• Gantt Chart, Requirements Document, Final Report
Benefits
Good for US: • Diverse : Software + Hardware + Mathematics /
Theoretical Understanding + Understanding commercial solutions
Good for THEM:
• Platform for further research on various calibration environments
• Manual calibration can be time consuming and expensive
Major Milestones
• Google Site Construction (https://sites.google.com/site/ecerobocam)
• Testing of Arduino, Gameduino, Motor Shield
• Motor Shield Assembly
• First prototype construction (pitch & yaw)
• Projector and Gameduino interfacing
• SOE Open House Demo http://www.cs.unm.edu/~jmk/robocam/IMG_3961.MOV

Second Prototype
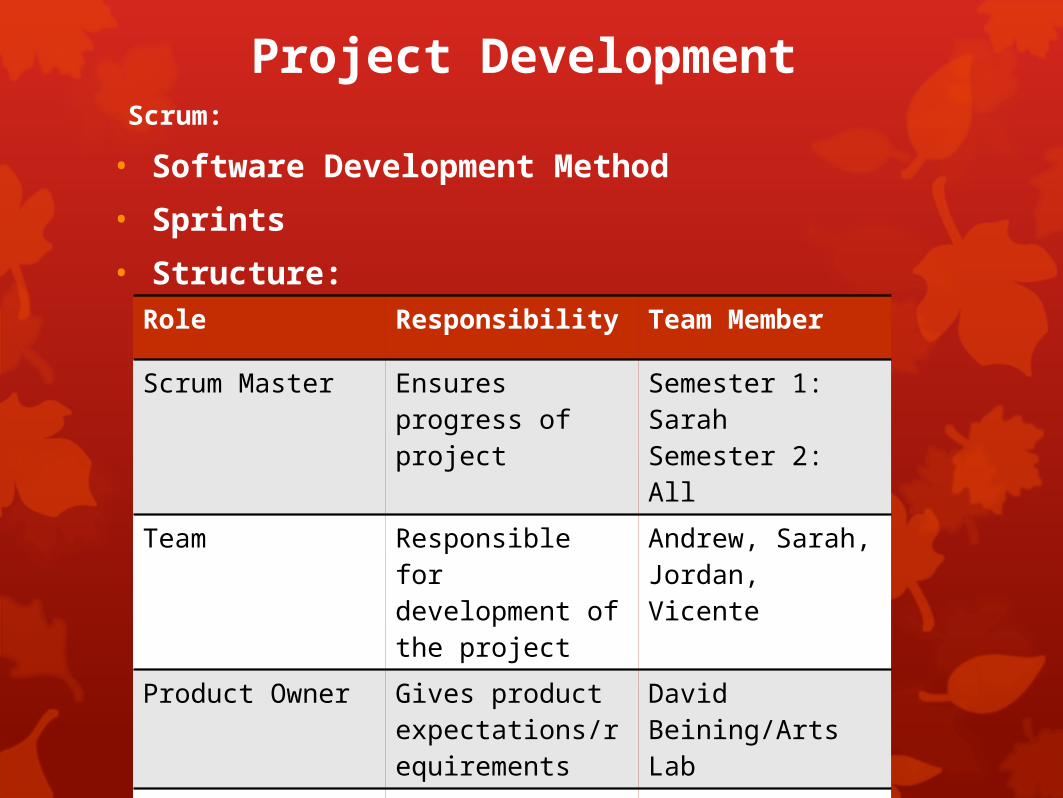
Project DevelopmentScrum:
• Software Development Method
• Sprints
• Structure:Role Responsibility Team Member
Scrum Master Ensures progress of project
Semester 1: SarahSemester 2: All
Team Responsible for development of the project
Andrew, Sarah, Jordan, Vicente
Product Owner Gives product expectations/requirements
David Beining/Arts Lab
Project Manager
Provides parts, ideas, & procedure
Dr. Joe Kniss

Sponsors' Roles
• Acquire/Provide necessary equipment
• Aiding in fabrication
• Assist in ideas for software and hardware components
• Help further our understanding to solve problems
Team Responsibilities (Non-Agile)
• Communication and Scheduling
• Website Maintenence
• Sprint Notes • Weekly Updates
• Update Gantt Chart and Requirements Document

Workspace

Materials
• Erector Set• Various Tools• Basic Circuit Elements• Projectors• Cameras• Arduinos• Various Shields• Measurement Devices• Anything We Can
Harvest
Upcoming Sprints
• Construction of next prototypes
• Testing of Bluetooth
• Motor Control
• Calibration calculations/theory
Expected Challenges
• Commercial solutions don't work as needed / expected
• Hardware failures/modifications
• Software Troubleshooting/Debugging
• Lack of resources
¿PREGUNTAS?














![Volume Visualization - CGL · use the result of an edge detection algorithm by Marr – Hildreth [Kniss-2001-IVR] or the Laplacian operator which uses the second derivation of the](https://static.documents.pub/doc/80x56/5f52d4b51e83b15ebb617659/volume-visualization-cgl-use-the-result-of-an-edge-detection-algorithm-by-marr.jpg)


