1© 2015 The MathWorks, Inc.
Using MATLAB and Simulink for Robot Simulation and Implementation
Yanliang Zhang (Ph.D.)Robotics Product and Industry [email protected]
RoboUniverse, 5/11/2015
2
Tesla Roadster: Whole Car Simulated using Simulink
3
Orion SpacecraftSuccessful first flight (unmanned) Dec. 5, 2014
4
Thought‐controlled prosthetics
5#1 (tied) Drone Formation Flying – University of Sydney
6
Smart Emergency Response System
7
Move from Simulation to Implementation?
Hand convert to C/C++ node?
Simulation Implementation
8
Demos…
1. Airplane Wing Landing Gear Control
2. Design and Test Robotics Algorithms Robots or Simulators with MATLAB
3. Design and Test Robotics Algorithms Robots or Simulators with Simulink
9
Demo1 Overview: Airplane Wing Landing Gear Control
Switch to Demo
10
Demo 2 Overview: Design and Test Robotics Algorithms
Prototype algorithms
(e.g., Path Planning) in MATLAB
Test algorithms with ROS-enabled Simulators such
as Gazebo
Test algorithms on a Robot
andanalyze the
performance with rosbag
Switch to Demo
11
Demo 2: Design and Test Robotics Algorithms
• Prototype a path-planning algorithm in MATLAB
12
Demo 2: Design and Test Robotics Algorithms
• Test it with Gazebo through MATLAB-ROS Interface
13
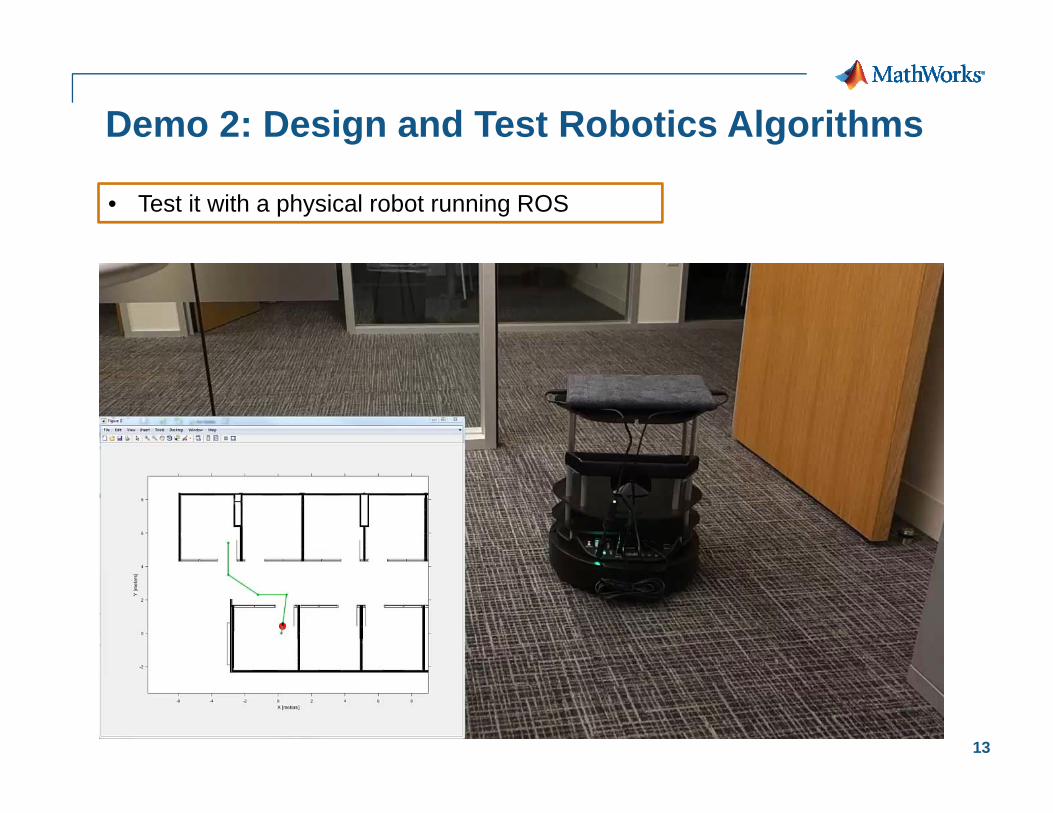
Demo 2: Design and Test Robotics Algorithms
• Test it with a physical robot running ROS
14
Demo 2: Design and Test Robotics Algorithms
• Analyze the performance by reading rosbag files
15
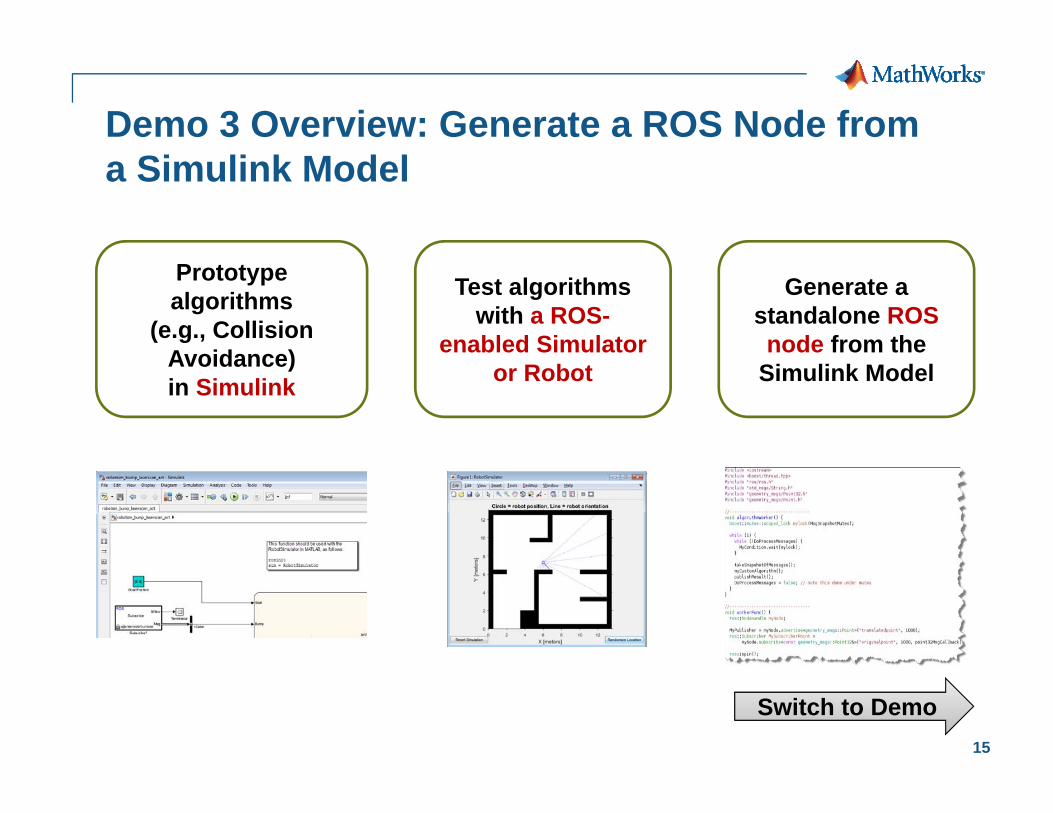
Demo 3 Overview: Generate a ROS Node from a Simulink Model
Prototype algorithms
(e.g., Collision Avoidance) in Simulink
Test algorithms with a ROS-
enabled Simulator or Robot
Generate a standalone ROS node from the
Simulink Model
Switch to Demo
16
Demo 3: Generate a ROS Node from a Simulink Model• Connect Simulink Model to a ROS network to simulate a Collision
Avoidance algorithm
17
Demo 3: Generate a ROS Node from a Simulink Models
• Convert Simulink model to C++ code for a standalone ROS node
18
Demo 3: Generate a ROS Node from a Simulink Model
• Verify the generated ROS node
19
Key Features of Robotics System Toolbox (v1.0)
• MATLAB-ROS Interface
• Simulink-ROS Interface
• Robotics Algorithms
• Comprehensive Demos
20
Key Takeaways
Robot simulation is important
Moving from simulation to implementation is easy, especially if you use MATLAB/Simulink
MathWorks new launched Robotics System Toolboxhas seamless integration between MATLAB/Simulink and ROS and Gazebo
21
Thank You…
Yanliang Zhang (Ph.D.)Robotics Product and Industry [email protected]


















![[FRC 2014] Robot Simulation Tutorial](https://static.documents.pub/doc/80x56/55cf850f5503465d4a8b4fba/frc-2014-robot-simulation-tutorial.jpg)
















