Page 1
8/8/2019 Robotics in Autonomous Planetary Exploration
http://slidepdf.com/reader/full/robotics-in-autonomous-planetary-exploration 1/5
NATIONAL INTELLUCTUAL CONFERENCE ON RESEARCH PERSPECTIVE- NICORP’10
1
ROBOTICS IN AUTONOMOUS PLANETARY EXPLORATIONRAJA.D, DEEPAN.A
Kongunadu College of Engineering & Technology
[email protected] , [email protected]
ABSTRACT:Today’s robotic technology is about
new ways of connecting people to computers,
people to knowledge, people to the physical
world, and people to people. This technology
invites investment in a system that saves
mountains of money, through applications such
as resource allocation, fraud detection, and
database mining, and training. One of the currentissues of using robots is in planetary exploration.
Manned missions for planetary exploration are
sometimes impossible due to a number of
reasons. In some cases, such as for the inner
moons of Jupiter or the surface of Venus, the
radiation or thermal environments are
unacceptable to the human body, while in others,
such as for the outer solar system, would last
almost a human lifetime. The obvious solution to
this problem is the use of robotic vehicles.
This paper provides the basic ideas about the
robots that are being used in autonomous
planetary fields.
AUTONOMOUS PLANETARYRESEARCH
One aspect of the Unmanned Aerial Vehicles
project is planetary exploration by fully
autonomous flight vehicles. Such a vehicle
would be transported to the planet as part of a
larger ship from Earth. Once deployed on the
planetary body of interest, for example Mars,
the vehicle would be able to collect
atmospheric and imagery data by flying over
the surface. Sensor packages might include
those that detect temperature, topographical
and sub surface features, elemental spectra,
and other items of scientific value.
Considerations must be made for the
atmospheric conditions of the planet or anybody in space under investigation.
The main requirements of the exploring
robots are
Materials used in robot
Components.
Propulsion
Control
Vision system
Navigation
Communication
Fig. A typical planetary exploration robot
Page 2
8/8/2019 Robotics in Autonomous Planetary Exploration
http://slidepdf.com/reader/full/robotics-in-autonomous-planetary-exploration 2/5
NATIONAL INTELLUCTUAL CONFERENCE ON RESEARCH PERSPECTIVE- NICORP’10
2
MATERAILS USED
The materials used in the design of the
exploring robots must be very much suited to
the outer space. Some of the important
conditions that are to be satisfied are:
1. The material must be smart enough to
suit to the gravitational pull present in
the planet to which it is to be sent.
2. It should not over weigh during the
propulsion.
3. The thermal behaviour of the
materials must suit to the
circumstances.
4. The most important consideration is
the material, which covers the whole
rover. This sounds more because
during the nighttime the temperature
may fall down to -100oc (150 F).
5. The material must be rigid and strong
but must be flexible to the
circumstances
6. It should be unaffected due to noise
disturbances.
7. Must be able to provide good quality
imagery under any conditions.
8. The important thing is it should be
economical.
BASIC COMPONENTS
In addition to manipulator- based robotics in
near- earth orbits, autonomous planetary
exploration will play an important role in
future space missions. The rover which
includes, Lander spacecraft configuration,
which allows an investigator to remotely
perform geosciences experiments on planet,
example Mars or mercury uses smaller
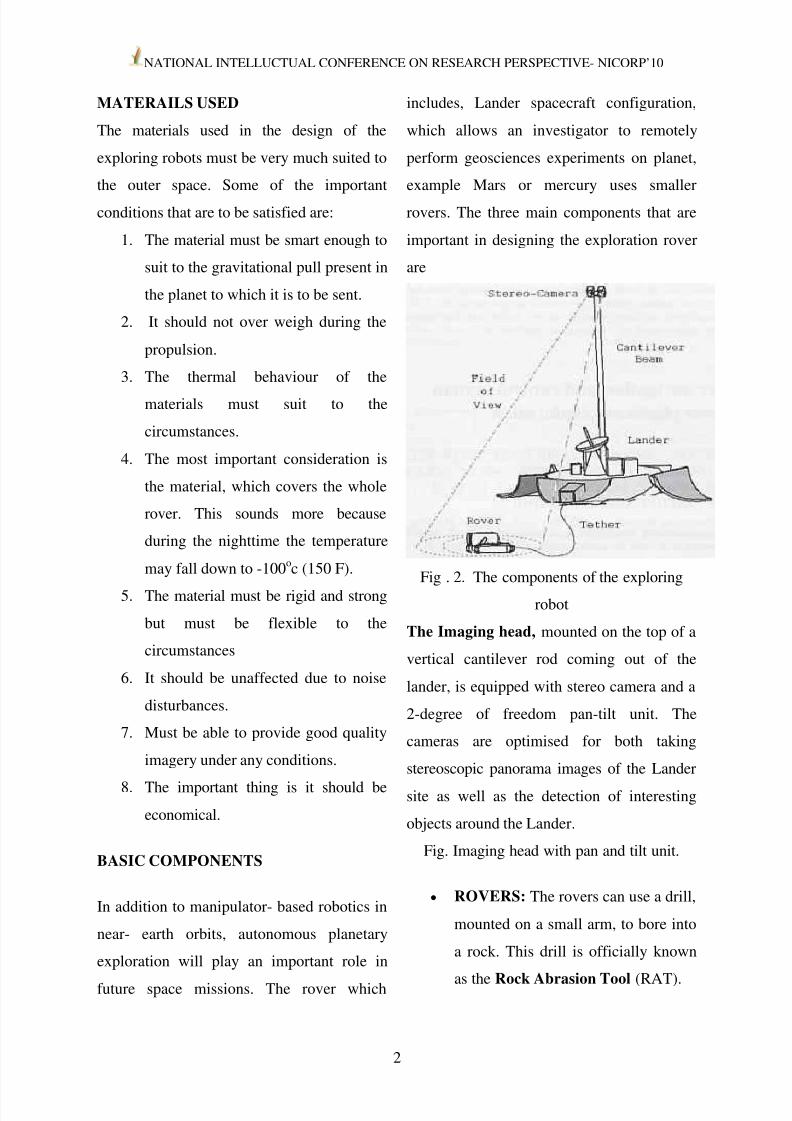
rovers. The three main components that are
important in designing the exploration rover
are
Fig . 2. The components of the exploring
robot
The Imaging head, mounted on the top of a
vertical cantilever rod coming out of the
lander, is equipped with stereo camera and a
2-degree of freedom pan-tilt unit. The
cameras are optimised for both taking
stereoscopic panorama images of the Lander
site as well as the detection of interesting
objects around the Lander.
Fig. Imaging head with pan and tilt unit.
ROVERS: The rovers can use a drill,
mounted on a small arm, to bore into
a rock. This drill is officially known
as the Rock Abrasion Tool (RAT).
Page 3
8/8/2019 Robotics in Autonomous Planetary Exploration
http://slidepdf.com/reader/full/robotics-in-autonomous-planetary-exploration 3/5
NATIONAL INTELLUCTUAL CONFERENCE ON RESEARCH PERSPECTIVE- NICORP’10
3
Fig. A Micro rover
The rovers have a magnifying
camera, mounted on the same arm as
the drill, which scientists can use to
carefully look at the fine structure of
a rock.
The rovers have a mass spectrometer
that is able to determine the
composition of iron-bearing minerals
in rocks. This spectrometer is
mounted on the arm, as well.
There are magnets mounted at three
different points on the rover. Iron-
bearing sand particles will stick to the
magnets so that scientists can look at
them with the cameras or analyse
them with the spectrometers. The rovers can send all of this data
back to Earth using one of three
different radio antennas.
To fit in a small space the rover
squats down by breaking the rocker
links where they pivot on the body.
Solar cells are used to provide the
required power supply to the rover.
PROPULSION
After the completion of the assembly and
after the rover has undergone various
simulation tests, the space robot is ready to
launch. The propulsion is the process by
which the rover is made to be inside the large
chamber called space ship and is made to
travel with a huge initial velocity. The huge
initial velocity facilitates the space ship to
reach the outer part of the earth’s
atmosphere. The essential thing for
propulsion is fuel. The great disadvantage
faced by the technicians is the cost that is
being spent for the fuel. The cost that is
invested for the fuel is more than 37% of the
total cost that is required for the whole
mission. Though it costs that much the burnt
fuel will help the space ship to travel only 50
km from the ground level, the remaining
distance that it has to be covered will be
made possible only by means of huge initial
velocity. Once the ship crosses the critical
limit it is carried on from there due to the
initial acceleration.
VISION SYSTEM:
Generally a rover has nine cameras mounted
on it for the purpose of capturing images
2 Forward B&W (Hazcam)
2 Rear B&W (Hazcam)
2 Mast B&W (Navcam)
2 Mast Colour (blue to IR)
1 Arm mounted B&W microscopic
imager.
Page 4
8/8/2019 Robotics in Autonomous Planetary Exploration
http://slidepdf.com/reader/full/robotics-in-autonomous-planetary-exploration 4/5
NATIONAL INTELLUCTUAL CONFERENCE ON RESEARCH PERSPECTIVE- NICORP’10
4
Fig. Position of various cameras on the
rover.
(1) Four Engineering Hazcams (Hazard
Avoidance Cameras):
Mounted on the lower portion of the front
and rear of the rover, these black-and-whitecameras use visible light to capture three-
dimensional (3-D) imagery. This imagery
safeguards against the rover getting lost or
inadvertently crashing into unexpected
obstacles, and works in tandem with software
that allows the rover make its own safety
choices and to "think on its own."
The cameras each have a wide field of view
of about 120 degrees. The rover uses pairs of
Hazcam images to map out the shape of the
terrain as far as 3 meters (10 feet) in front of
it, in a "wedge" shape that is over 4 meters
wide at the farthest distance.
(2) Two Engineering Navcams (Navigation
Cameras):
Mounted on the mast (the rover "neck and
head), these black-and-white cameras use
visible light to gather panoramic, three-
dimensional (3D) imagery. The Navcam is a
stereo pair of cameras, each with a 45-degree
field of view to support ground navigation
planning by scientists and engineers. They
work in cooperation with the Hazcams by
providing a complementary view of the
terrain.
(3) Two Science Pancams (Panoramic
Cameras):
This colour, stereo pair of cameras, called as
the “eyes” of the rover, are mounted on the
rover mast and delivers three-dimensional
panoramas of the surface. As well as science
panoramas, the narrow field of view and
height of the cameras basically mimic the
resolution of the human eye (0.3
milliradians); giving the world a view similar
to what a human geologist might see if she or
he were standing on the surface. Also, the
Pancam detectors have 8 filters per "eye" and
between the two "eyes" there are 11 total
unique colour filters plus two-colour, solar-
imaging filters to take multispectral images.
The Pancam is also part of the rover¹s
navigation system. With the solar filter in
place, the Pancam will be pointed at the Sun
and therefore will be used as an absolute
heading sensor. Like a sophisticated
compass, the direction of the Sun combined
with the time of day tells the flight team
exactly which way the rover is facing.
Page 5
8/8/2019 Robotics in Autonomous Planetary Exploration
http://slidepdf.com/reader/full/robotics-in-autonomous-planetary-exploration 5/5
NATIONAL INTELLUCTUAL CONFERENCE ON RESEARCH PERSPECTIVE- NICORP’10
5
Fig. Image of the Martian eclipse taken by
the MER “spirit”
(4) ONE MICROSCOPIC IMAGER
The Microscopic Imager is a combination of
a microscope and a CCD camera that will
provide information on the small-scale
features of rocks and soils. It will
complement the findings of other science
instruments by producing close-up views of
surface materials. Some of those materials
will be in their natural state, while others
may be views of fresh surfaces exposed by
the Rock Abrasion Tool.
Microscopic imaging will be used to analyze
the size and shape of grains in sedimentary
rocks, which is important for identifying
whether water may have existed in the
planet's past. This monochromatic science
camera is mounted on the robotic arm to take
extreme close-up pictures of rocks and soil. .
Its field of view is 1024 x 1024 pixels in size
and it has a single, broadband filter so
imaging is in black and white.
Fig. Image of a rock on the surface of mars
taken by the microscopic imager.
COMMUNICATON
Some of the techniques that have been
followed since now in the application of
spacial robots are
Tele-operated.
One camera providing vision.
2 cameras allowing for stereo vision
and depth perception.
UHF link with Lander.
Tele-operated via modem and
software.
CONCLUSION
The researches extend navigation algorithmsto better analyze terrain traversability, using
wavelet representations, and to better handleuncertainty in sensing and position
estimation. This will also intend to explore
methods for landmark-based positionestimation, use of multiple sensors for terrain
perception, integrating autonomous science
exploration and navigation, and
incorporating learning algorithms to enable
the rover to adapt to unexpected changes inthe environment and vehicle characteristics.
At the most extreme researches theexploration work may lead in to the analysisof the interior of the master of our system that is THE
SUN.
References:
1. ADVANCED ROBOTICS. Vol.18 No.3
pp245-356.2. UNMANNED SYSTEM Vol.22 No.2.3. S.LAUBACH & J.W.BURDICK. An
autonomous sensor based path planner for planetary micro rover in IEEE