66
Robotics Introduction and terminology Dipartimento di Elettronica, Informazione e Bioingegneria @ G. Gini 2015

RoboticsIntroduction and terminology
Dipartimento di Elettronica, Informazione e Bioingegneria
@ G. Gini 2015

G. Gini
summary
1. Our course2. Robots: definitions and market3. From robots to robotics4. Robot as a system

G. Gini
organization
• 50 hours (30 + 20)Wednesday 13:15-15:15 in EG3(lessonclass)
Giuseppina GiniThursday13:15-15:15 in D11(exercise class)
Marcello Restelli
Course site: http://home.deib.polimi.it/gini/robot

G. Gini
syllabus• 1. THE ROBOT AS A SYSTEM
Functional model of a robot. From robot to robotics.Structural and functional components of a robot (links, joints, actuators, sensors, …). Role of the operator (telecontrolled, programmed, autonomous robot)
• 2. REPRESENTING SPACEHomogeneous transformations and coordinate frames coordinates. Eulerangles.Configuration space vs Cartesian space.
• 3. DESCRIBING MOVEMENT Degrees of mobility and of freedom.Classification and description of mechanical structures (chains, wheels, legs)From Cartesian space to actuation space and back: kinematic models, Denavitt-Hartemberg notation, direct and inverse kinematics of manipulators and wheeled robots.
• 4. SENSING AND PERCEPTIONTypes of sensors and their role as eteroceptive or proprioceptive sensors.triangulation and position estimationImage acquisition and basic image analysis.From computer vision to robot vision.

G. Gini
syllabus• 5. CONTROLLING THE ROBOT
Actuators for robotics.Robot control based on kinematic model and on trajectory computationNon holonomic constraints and the control of mobile robots.Integration of external sensors (force, vision).
• 6. ROBOT PROGRAMMING Languages in joint and in Cartesiam space.Simulators, virtual reality, and middleware for robotics.The user interface.
• 7. MAPS AND PATH PLANNING Maps and C-space maps.Geometric approaches to path planning and terrain covering.Localization and guidance systems.
• 8. TASK EXECUTIONTelecontrol and semi-autonomous teleoperation .Collision avoidance.Architectures for autonomous robots: reactive, behavior based, deliberative.Robots as physical agents. AI architectures and learning.

G. Gini
Suggested booksG. Gini, V. Caglioti, "Robotica", Zanichelli 2003 - only in
Italian
J. J. Craig, "Introduction to Robotics: Mechanics and Control", 3nd edition, Addison-Wesley, 2005 - withMatlab exercises
M. W. Spong, S. Hutchinson, M. Vidyasagar “Robot Dynamics and Control” - Second Edition, 2004
R Siegwart and Illah R. Nourbakhsh, "Introduction to autonomous mobile robots", MIT Press, Cambridge (Mass.), 2004
Download – for a short time - from the course page

G. Gini
Other booksG. A. Bekey, "Autonomous Robots - From
Biological Inspiration to Implementation and Control”, MIT Press, Cambridge (Mass), 2005.
H. Choset et al. “Principles of robot motion”, MIT Press, Cambridge (Mass), 2005.
G. Dudek, M. Jenkin, "Computational Principles of Mobile Robotics", Cambridge University Press, New York 2000.
R. L. Paul, “Robot manipulators: mathematics, programming, and control, The MIT Press, Cambridge (Mass), 1981.

G. Gini
examinations
• Written – closed booksMarks: 33
+• Oral examination
questionsorstudent presentation

G. Gini
In our lab: Hand eye
Maximum One (2003)
Eracle (2010)PEMGO (2011)
poliMANUS (2010)

G. Gini
In our lab: legs and whegs• Ulisse (1994)• LARP (2003)• WARUGADAR(2008) • Voltron (2010)• LionHell (2012)

G. Gini
In our lab: fish• ZOIDBERG (2008) - EAP• ZOIDBERG II (2010) - SMA

G. Gini
summary
1. Our course2. Robots: definitions and market3. From robots to robotics4. Robot as a system

G. Gini
Steps in robot history
• Mechanical: 1700 automata, karakuri-ningyo
• Fiction: 1920, “robot”• cybernetics: 1940,
turtle…• telemanipulation: 1940,
telerobot• automation: 1960,
industrial robot • Information: intelligence,
autonomy, cooperation

G. Gini
Human arm• 2 coordinated arms• Each has more than 25 gdl• Integrated with vision
• Reaching• Grasping• Manipulatingkarakuri-ningyo, ~1700

G. Gini
The first robots
• 1961 - "UNIMATE, the first industrial robot, began work at General Motors. Obeying step-by-step commands stored on a magnetic drum, the 4,000-pound arm sequenced and stacked hot pieces of die-cast metal.
• 1968 - Marvin Minsky developed theTentacle Arm, which moved like an octopus. It had twelve joints designed to reach around obstacles. A PDP-6 computer controlled the arm, powered by hydraulic fluids. Mounted on a wall, it could lift the weight of a person.

G. Gini
Industrial robots today
•Iso - ROBOT = •automatically controlled, reprogrammable, multipurposemanipulator programmable in three or more axes. May befixed or move on wheels or rails

G. Gini
Classification - manipulators
Mobilityfixedmoving on
railswheelslegscingoli
Architecturecartesianicilindricalspherical“scara”articulated3 dof, 4 dof, 5 dof, 6 dofmore than 6 dofcomplex (humanoid, etc)
Typology,parallelserialhybridmodular
Performancehigh precision and high repeatability(Cartesian, parallel- electronics, ..)medium precisione (generalmanipulation and assembly)low precisione (packaging, painting,...)
Velocityslow robot to work with high precisionfast robot ( packaging) with PTP control
Trajectorystop to stoppoint to pointcontrolledcontinuous
Controlopen loopclosed loopadaptive control

G. Gini
Classification - applications
• Industrialsolderingpaintingassemblymanipulationpackaging material transfermoldingfoundrylaser 3d cuttingquality controlcombinatorial chemistrymedical analysis lab
• Specialsurgerymedical assistancerehabilitationspace applicationsmarine applicationsnuclearwararcheologicalmine removalbuilding and construction

G. Gini
Telecontrolled robots
• Tele-student
• Tele-grand son
• Tele-nurse• Bomb disposal

G. Gini
Human robot interface
• Telecontrol• Teleprogramming• Autonomous and proactive behavior
G. Gini
Where ?
• “My guess is that in five years, there will be 10 times the number of robots deployed in hospitals that there are today,” said Donald Jones, a managing director at DraperTriangle Ventures (d. December 15, 2012), who is backingprivately held robotics company Aethon Inc. “We are just not going to have enough human hands to do all the work.”
• “Fewer than 1,000 of these blue-collar robots currentlyroam about hospitals, but those numbers are expected togrow quickly,” reports the Wall Street Journal’s Timothy Hay.
G. Gini
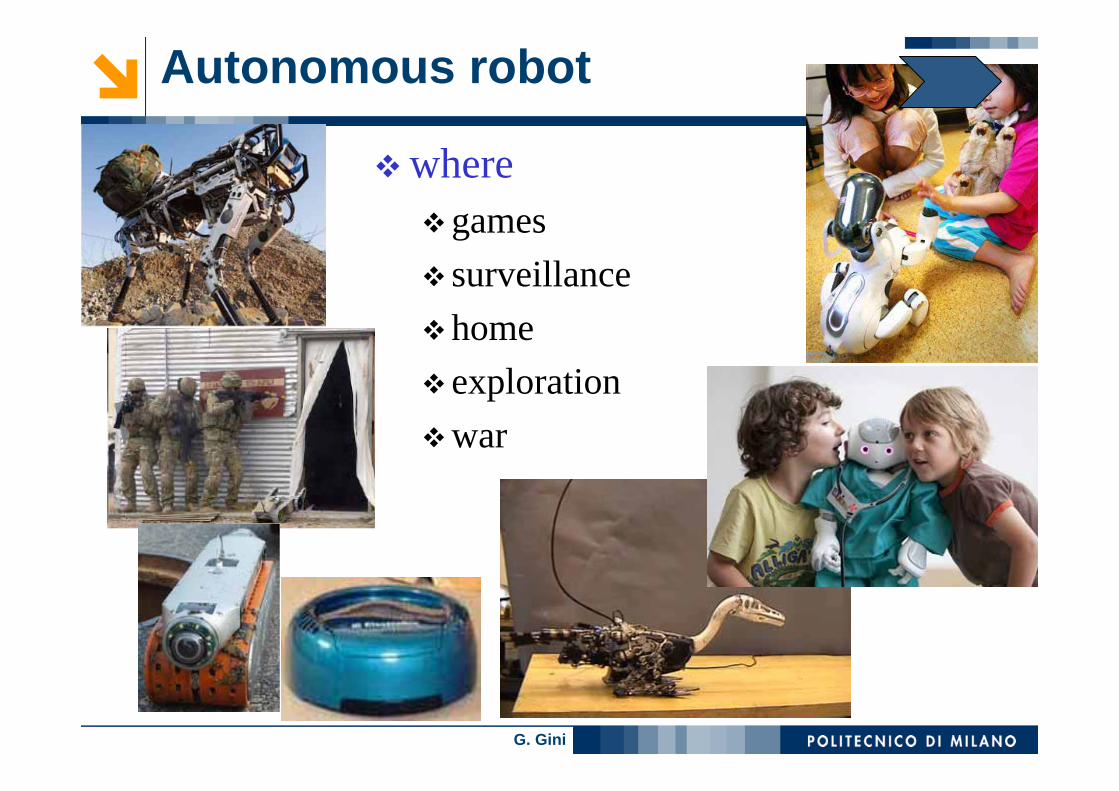
Autonomous robot
wheregamessurveillancehomeexplorationwar

G. Gini
Autonomous vehiclesThere are about 33 000 traffic deathsannually in the United Statesand 39 000 in European Union countries.

G. Gini
Evolutive - modular - nanorobots
Xerox, Xerox, ParcParc

G. Gini
Medical robots
surgery
exoskeleton
prosthesis implants
rehabilitation

G. Gini
Space robots
Exploration, building

G. Gini
IFR report 2013
MarketRobot sales in 2012 - 159,346 unitsAbout 70% to Japan, China, USA, Korea and Germany.Worldwide Japan is the first market In Europe Germany is the firstmarket
Robot density396 robot/10000 manufacturing workers in Korea273robots/1000 in Germany

G. Gini
In industrial applications

G. Gini
Number of robots - forecasting

G. Gini

G. Gini
Service robots

G. Gini
Service robots

G. Gini
Personal robots

G. Gini

G. Gini
This is the robot age.In the future the robots will be us”-- R. Brooks

G. Gini
summary
1. Our course2. Robots: definitions and market3. From robots to robotics4. Robot as a system

G. Gini
Which one is the robot?

G. Gini
Imitating nature
Shape and behavior
from animals

G. Gini
avatar
In the movie Avatar, humans could control giant genetically engineeredhuman-alien hybrids.
• DARPA, the U.S. Defense Advanced Research Projects Agency wantsthis kind of system to be real, just replace "giant genetically engineeredhuman-alien hybrids" with "robots."
• In its 2012 budget, DARPA has decided to pour US $7 million intothe "Avatar Project," whose goal is the following: "develop interfacesand algorithms to enable a soldier to effectively partner with a semi-autonomous bi-pedal machine and allow it to act as the soldier’s surrogate.”

G. Gini
Continuum shape-action
“morphological computation”= the task are distributed between shape and material (body), control
(brain), environment
“Why do plants not have brains? The answer is actually quite simple: they don’t have to move.”Lewis Wolpert

G. Gini
Sensory motor control
reflexes
Reflexes act in a way similarto neural networks
Frontal lobs
Frontal lobs act in a way similar to symbolic architectures

G. Gini
Morphological computation
Tumble weedsno actuationmove with the wind

G. Gini
Morphological computation in spider
8 eyes, 4 layers of cells each, sensible to different wave lenghts

G. Gini
First lesson
• A robot is more than the sum of its parts
• More than mechatronicsmodularitylearninginteraction

G. Gini
Robot vs robotics
Robotics = to coordinate perception and action toreach a goal
motion planning perceptiontrajectory interpretationcontrol data
to the world from the world
MO
TOR
SE
NS
ING

G. Gini
Robots in ICTDisappearing computer • interfaceEmbedded system, embodied intelligence• Skills, learningInternet of thingsCognitive science• models –neuroscience
The trouble with computers is that they do what you
tell them, not what you want.
-- D. Cohen

G. Gini
summary
1. Our course2. Robots: definitions and market3. From robots to robotics4. Robot as a system

G. Gini
Robot as a system
subsystem MECHANICS
(arm, wheels, …)
subsystem ACTUATORS
(motors, artificial muscles, …)
subsystem CONTROL
(control loop, transformations,
subsystem PROCESS
(task, environment)
subsystem SENSORS
(internal and external)
subsystem PLANNING
(path, grasps, trajectories)
OPERATOR

G. Gini
Telerobot, industrial robot, autonomous robot
control
remote environment
display sensors
actuators
remote environment
sensors
actuators C1 C2
display
control
- C2 robot controller- C1 user interface controller

G. Gini
movement
internal sensor
Motor
arm
hand
base
wheel leg
joint
Link
Absolute
Reference
system

G. Gini
Control unit
Controller unit
comunication action planner
perception trajectory planner
sensor interfaces controller of the movement
Teach Box
Host
Computer
Vision system
Tactile sensors

G. Gini
Tele- programming and simulation
Inte
rnet
Robot
Robot controller
Server
camera
Image Server
Site 1
Site 2

G. Gini
Actuators subsystem
subsystem MECHANICS
(arm, wheels, …)
subsystem ACTUATORS
(motors, artificial muscles, …)
subsystem CONTROL
(control loop, transformations,
subsystem PROCESS
(task, environment)
subsystem SENSORS
(internal and external)
subsystem PLANNING
(path, grasps, trajectories)
OPERATOR

G. Gini
• traditional actuators are very rigid (stiff)•pro (precision, stability, …
•contro ( heavy, friction, more inerzia, rumore,etc)
• wanted characteristics•Elastic, compliant
•High ratio force/mass
actuators

G. Gini
Rigid or flexible
• StifnessImproves positioning precision and stability, reduces errors due to external distourbance
• Stifness has a cost: electric motors have to run at high velocity to get the needed power; gears are necessary to reduce velocity.
• Gears introduce friction, are noisy, Gears have been eliminated in direct drive motors for industrial robots. However direct drive motors do not produce enough force density for mobile robots

G. Gini
McKibben actuators
• Some properties of the realmuscles
• Pro: high rate force/wheight (10 newton/20 grams)
• Control: need high pressure air

G. Gini
Sensors subsystem
subsystem MECHANICS
(arm, wheels, …)
subsystem ACTUATORS
(motors, artificial muscles, …)
subsystem CONTROL
(control loop, transformations,
subsystem PROCESS
(task, environment)
subsystem SENSORS
(internal and external)
subsystem PLANNING
(path, grasps, trajectories)
OPERATOR

G. Gini
sensors
MANY USES:• To measure the robot parameters• To find objects• To check for collision• To monitor the environment• To inspect the result of a process
transductorSignaltransf
Signal processing
Physical entity
computer
perception

G. Gini
Levels of sensorial processing
• Perceptive levelState of the worldConsequences of action
• Model levelConstruction ofgeometric levelSensorial fusion
• Measure levelSignal conversion
• Physical leveltransductor

G. Gini
Sensors in biological systems
• Proprioceptive and eteroceptiveProprioceptive: muscle stress, equilibrium, …Eteroceptive: 5 senses
• More sensors act togetherMechanism of attention
• Strictly integrated in behavioursimitation

G. Gini
Control subsystem
subsystem MECHANICS
(arm, wheels, …)
subsystem ACTUATORS
(motors, artificial muscles, …)
subsystem CONTROL
(control loop, transformations,
subsystem PROCESS
(task, environment)
subsystem SENSORS
(internal and external)
subsystem PLANNING
(path, grasps, trajectories)
OPERATOR

G. Gini
Position and force control
• To get a precise movement, position control is used (industrial robots)
• To adapt to externalforces: force control(autonomous robots) isneeded
• In biological systems, the sensory-motor controlintegrates position and force control
Red: motor path, from brain to musclesYellow: sensing path, from receptors to brain

G. Gini
Planning/programming subsystem
subsystem MECHANICS
(arm, wheels, …)
subsystem ACTUATORS
(motors, artificial muscles, …)
subsystem CONTROL
(control loop, transformations,
subsystem PROCESS
(task, environment)
subsystem SENSORS
(internal and external)
subsystem PLANNING
(path, grasps, trajectories)
OPERATOR

G. Gini
Robot as a physical agent (AI)
Has sensors to build a modelof the world (objects, events, places)Builds plans to reach goalsUses learning to performbetter
AI does not explain howtoautonomously develop itsgoals

G. Gini
Innate and added-on behaviours and skills
• Sensor motor actions can be “wired” – reflexes, ..• More are added after experience• From nature
No need of a hierarchical systenNo need of a central memoryNo need of symbolic reasoning

G. Gini
programming
• In industrial robotics: a program completely specifiesactions and sensig activities
• In autonomous robot: some auto-programming, guided through GUI, voice commands, …
• The future: imitation learning ?

















