50
Robotics Research Laboratory 1 Chapter 2 Discrete System Analysis – Discrete Signals
| Date post: | 25-Dec-2015 |
| Category: |
Documents |
| Upload: | monica-lindsey |
| View: | 224 times |
| Download: | 0 times |

Robotics Research Labo-ratory
1
Chapter 2
Discrete System Analysis – Discrete Signals
Robotics Research Labo-ratory
2
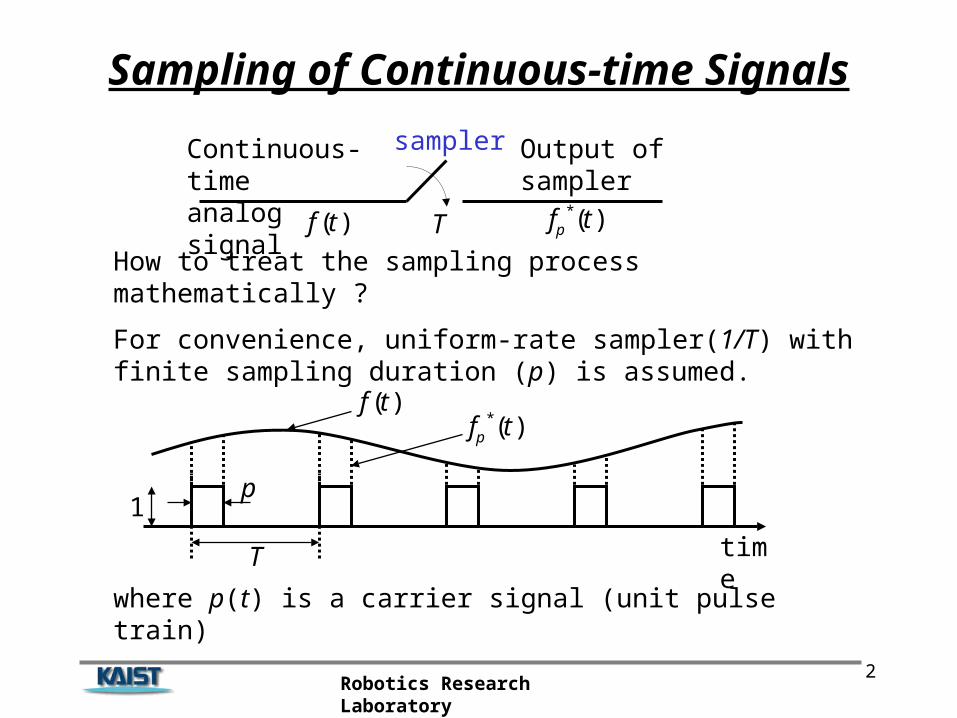
Sampling of Continuous-time Signals
How to treat the sampling process mathematically ?
Output of sampler
( )f t*( )pf t
Continuous-time analog signal
T
For convenience, uniform-rate sampler(1/T) with finite sampling duration (p) is assumed.
T
p1
time
( )f t*( )pf t
where p(t) is a carrier signal (unit pulse train)
sampler

Robotics Research Labo-ratory
3
This procedure is called a pulse amplitude modulation (PAM)
carrier signal p(t)
( )f t*( ) ( ) ( )pf t f t p t
PAM
The unit pulse train is written as
k
p t u t kT u t kT p p T
( ) ( ) ( ) where
By Fourier series
0
2( ) , ( )
1and ( )
s
s
jnω tn sn
T jnω tn
πp t C e ω sampling frequency
T
C p t e dtT
0
1 1 s
s
jnω pp jnω t
ns
eC e dt
T jnω p
sjnω p
sn
s
nω ppC e
T nω p
2sin( / 2)
/ 2
magnitude phase
or

Robotics Research Labo-ratory
4
0
sin( / 2),
/ 2s
ns
nω pp pC C
T nω p T
* ( ) ( ) ( ) ( ) sjnω tp nn
f t f t p t C f t e
* *
*
( ) { ( )}
( )
( )
( )
s
s
p p
jωtp
jnω t jωtnn
jnω t jωtnn
F jω f t
f t e dt
C f t e e dt
C f t e e dt
F
s 2s 3s 4s0-s-2s-3s-4s
2
T
2
p
ω

Robotics Research Labo-ratory
5
Let { ( )} ( ) where { ( )} ( )sjnω tse f t F jω jnω f t F jω F F
* *( ) { ( )} ( )p p n snF jω f t C F jω jnω
F
c s/20-c-s /2
1
|F(j)|
c : Cutoff frequency
* ( ) ( ) sjnω t jωtp nn
F jω C f t e e dt
Spectrum of Input Signal

Robotics Research Labo-ratory
6
0-s2π
p
* ( )pF jω
1
2 s cω ω
s0-s
* ( )pF jω1
2 s cω ω
ω
frequency folding
s ω
Spectrum of Output Signal
2π
p

Robotics Research Labo-ratory
7
Theorem : Shannon’s Sampling Theorem
To recover a signal from its sampling, you must sample at least twice the highest frequency in the signal.
2 2since and c s
c s
π πω ω
T T
or 22
sc c s
ωω ω ω
c s c si e T T T T 1. ., 2 or 2/ 2 : Nyquist frequency (or folding frequency)N sω ω
Remarks:
i) A practical difficulty is that real signals do not have Fourier
transforms that vanish outside a given frequency band.
To avoid the frequency folding (aliasing) problem,
it is necessary to filter the analog signal before sampling.
Note: Claude Shannon (1917 - 2001)
Robotics Research Labo-ratory
8
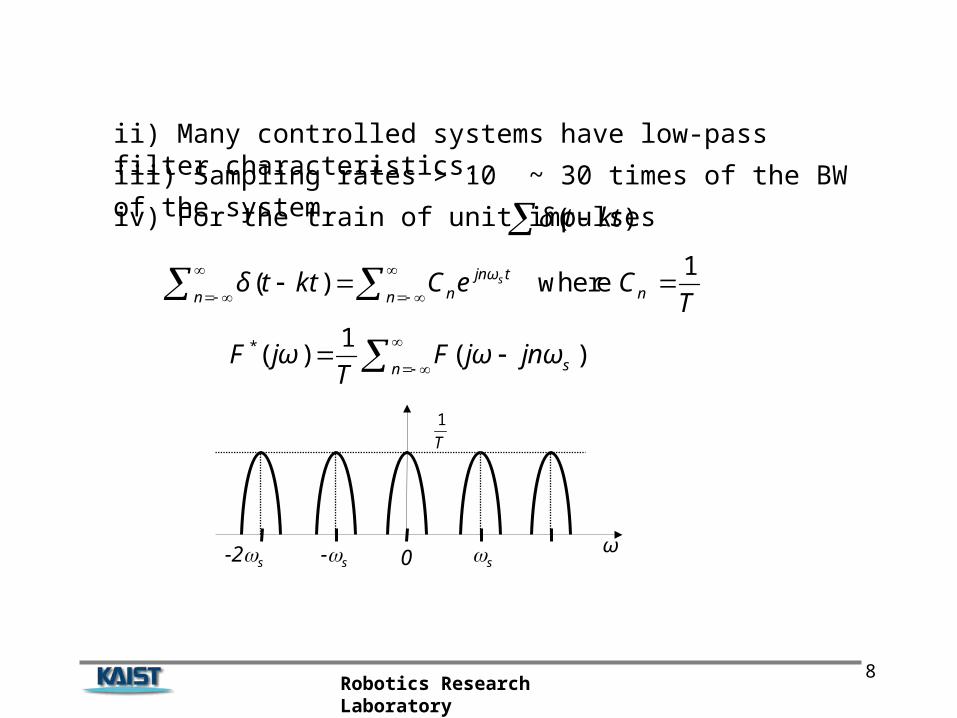
ii) Many controlled systems have low-pass filter characteristics.
iii) Sampling rates > 10 ~ 30 times of the BW of the system.
iv) For the train of unit impulses ( )δ t kt1
( ) where sjnω tn nn n
δ t kt C e CT
1* ( ) ( )snF jω F jω jnω
T
s0-s
1
T
ω-2s

Robotics Research Labo-ratory
9
Remarks :
i) Impulse response of ideal low-pass filter (non-causality)
Ideal low-pass filter is not realizable in a physical system.
How to realize it in a physical system ? ZOH or FOH
( )X s( )δ t *( )X s Ideal filter
G(j)
( )Y s
sampling
c0-c
1
|X(j)|
c0-c
1/T
|X*(j)|
c0-c
|Y(j)|
reconstruction
1/T
T
Robotics Research Labo-ratory
10
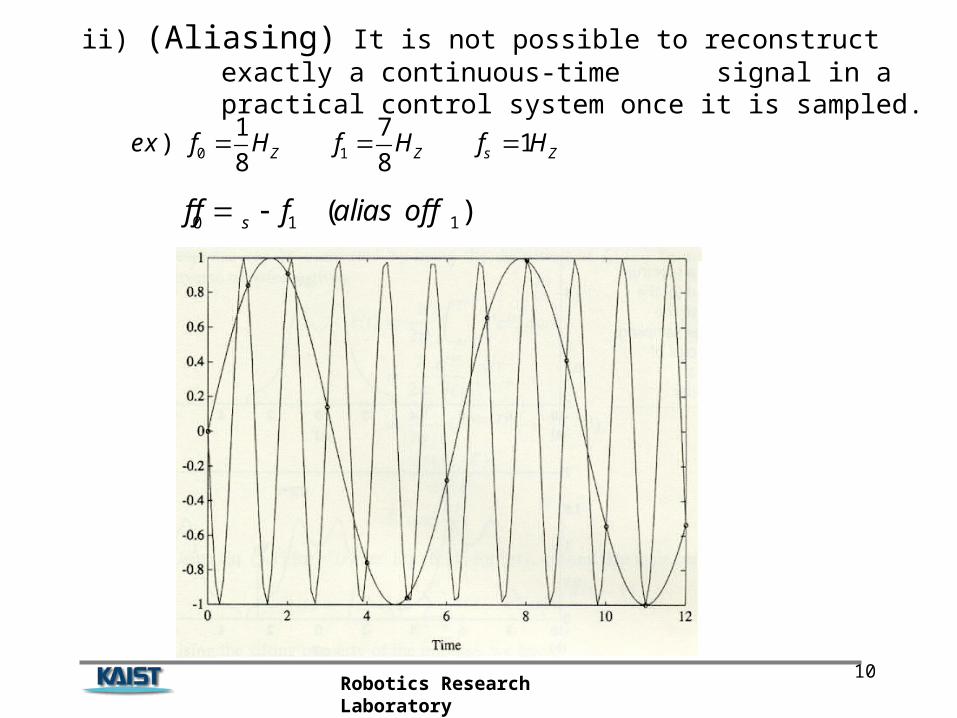
0 1
1 71
8 8Z Z s Zex f H f H f H )
0 1 1 ( )sf f f alias of f
ii) (Aliasing) It is not possible to reconstruct exactly a continuous-time signal in a practical control system once it is sampled.

Robotics Research Labo-ratory
11
If the continuous-time signal involves a frequency compo-nent equal to n times the sampling frequency
(where n is an integer), then that component may not appear in the sampled signal.
sω( )f t
iii) (Hidden oscillation)

Robotics Research Labo-ratory
12
2 2) ( ) sin sin3 if 3 / sec
3s ss
π πex f t t t ω rad T
ω
Robotics Research Labo-ratory
13
Signal Reconstruction
How to reconstruct (approximate) the origi-nal signal from the sampled signal?
- ZOH (zero-order hold)
- FOH (first-order hold)

Robotics Research Labo-ratory
14
ZOH (Zero-order Hold)2
21
( )( ) ( ) ( )( ) ( )
!where ( )
f kTf t f kT f kT t kT t kT
kT t k T
1
1
f t f kT kT t k T
f t f kT f kT t kT kT t k T
in ZOH, ( ) ( ) , ( )
in FOH, ( ) ( ) ( )( ) , ( )
Ttimek k+1k-1
zero-order hold reconstruction

Robotics Research Labo-ratory
15
/2
( / )
( ) ( ) ( )
1 1( )
1 sin( / 2)( )
sin( / )2
/
1
s
ho
Tsho
jωT jωT
ho
jπ ω ωs
s
Ts
s
g t u t u t T
G s es s
e ωT eG jω
jω
e
ω
πω ωπe
ω πω
s
ω
phase lag

Robotics Research Labo-ratory
16
0
π
2π
3π
ω
22
2
( ) sin
sin2
ωTj
ωTho
ωT
G jω e
ωT
ω2ωs ωs2ωs 3ωs0
Ideal low-pass filter2( )
s
πT
ω
0.637T
( )hoG jω

Robotics Research Labo-ratory
17
Remarks:
i) The ZOH behaves essentially as a low-pass filter.
ii) The accuracy of the ZOH as an extrapolator depends greatly
on the sampling frequency, .
iii) In general, the filtering property of the ZOH is used almost
exclusively in practice.
ωs
Robotics Research Labo-ratory
18
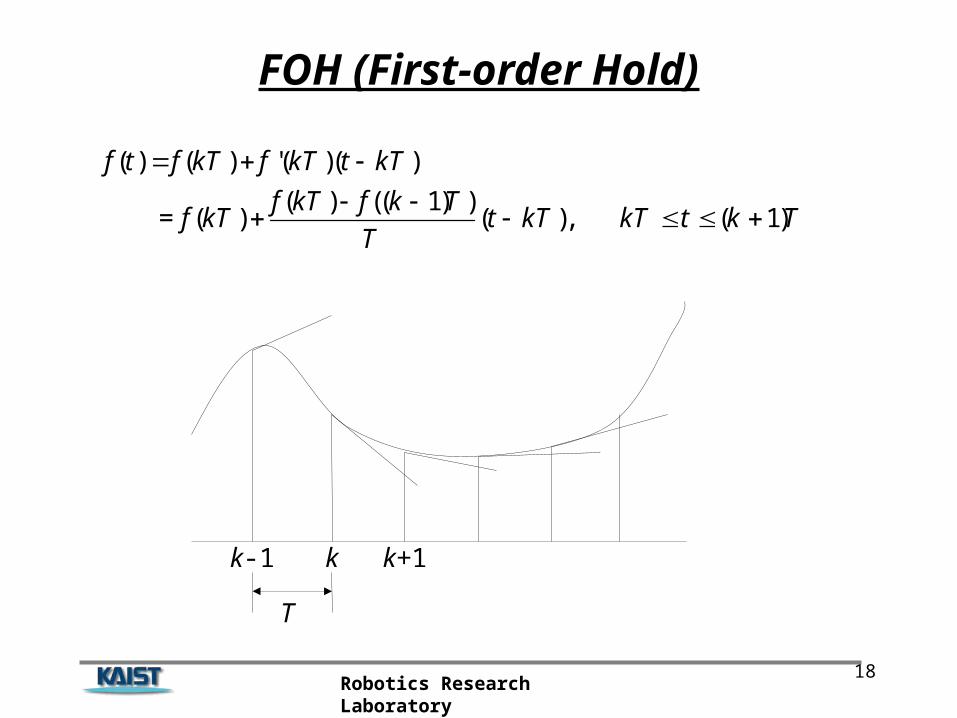
( ) ( ) '( )( )
( ) (( 1) ) = ( ) ( ), ( 1)
f t f kT f kT t kT
f kT f k Tf kT t kT kT t k T
T
k-1 k k+1
T
FOH (First-order Hold)

Robotics Research Labo-ratory
19
When k =0, (0) ( )( ) (0)
impulse (0) 1, ( ) 0
1 ( ) 1 ( ), 0
hf
f f Tf t f t
Tf f T
f t t g t t TT
( ) (0)1, ( ) ( ) ( )
(0) 1, ( ) 0
1 ( ) 1 ( ), 2
hf
f T fk f t f T t T
Tf f T
f t t g t T t TT
2, ( ) 0
( ) 0, (2 ) 0
k f kT
f T f T
( ) 0 ( ), 2
hff t g t t T

Robotics Research Labo-ratory
20
2
1
0
-1 T 2T 3T time
2
2
( ) 1 ( ) 2 1 ( )
2 1 ( 2 )
1( ) 1
hf
Tshf
t t Tg t u t u t T
T T
t Tu t T
T
TsG s e
Ts

Robotics Research Labo-ratory
21
2 sω 3 sω ω
2
s
π
ω
2 sω ω
π
2πfirst
zero
Large lag(delay) in high frequency makes a system unstable
( )hfg jωfirst
zero
3 sω
sω
sω0
0

Robotics Research Labo-ratory
22
Remark:
At low frequencies, the phase lag produced by the ZOH exceeds that of FOH, but as the frequencies become higher, the opposite is true

Robotics Research Labo-ratory
23
Z-transform
( ) ( ) ( )
( ) 1
f t δ t a dt f a
δ τ dτ
* *
*
( ) ( ) 1
( ) ( )
( ) ( )
( ) ( )
sτ
sτ
sτ
skT
δ t δ τ e dτ
r t r t e dτ
r τ δ τ kT e dτ
R s r kT e
L
L
( )r t * ( ) ( ) ( )r t r t δ t kT
T

Robotics Research Labo-ratory
24
1
Since is an irrational function,
define or ln
skT
sTTz e s z
e
T
T
s z
s z
k
R z z - transform of r t
r t or r kT
r t
R s
R z r kT z
1
1
*ln
*ln
( ) ( )
( ) ( )
[Laplace transform of ( )]
[ ( )]
( ) ( )
Z Z

Robotics Research Labo-ratory
25
iii) If 0, the sequence {rk} is said to be z-transformable.
ii) The series in z-1 has a radius of convergence such that the
series converges absolutely when | z-1 |<
1
1.
lim
1 lim
k
kk
k kk
i e zρ
rratio test ρ
r
root test ρr
i) Because R(z) is a power series in z-1 , the theory of power series may be applied to determine the convergence of
the z-transform.

Robotics Research Labo-ratory
26
Z-transform of Elementary Functionsi) Unit pulse function
0
1 , 0( )
0 , 0
( ) ( ) 1k
k
ke k
k
E z e k z z
Remark: unit impulse = 1[1]Z
0
1 2
11
1 , 0( )
0 , 0
( ) ( )
1
1 , 1
1
, 11
k k
k k
ke k
k
E z e k z z
z z
zz
zz
z
ii) Unit step function

Robotics Research Labo-ratory
27
0 0
1 2 3
1 2 3 4
1 2 3
1 2 3 1
1
1 2 2
, 0( )
0 , 0
( )
( 2 3 )
( ) ( 2 3 4 )
( ) (1 2 3 4 )
( )( 1) (1 ), 1
( )(1 ) ( 1)
k k
k k
kT ke k
k
E z kTz T kz
T z z z
E z T z z z z
zE z T z z z
E z z T z z z z
z zE z T T
z z
iii) Ramp function

Robotics Research Labo-ratory
28
iv) Polynomial function
1
0 0
11
, 0( )
0 , 0
( ) ( )
1 , 1
1
,
k
k k k
k k
r ke k
k
E z r z rz
rzrz
zz r
z r
v) Exponential function
1 2 2
11
, 0( )
0 , 0
( ) 1
1 , 1
1
,
rkT
rT rT
rrT
rrT
e ke k
k
E z e z e z
e ze zz
z ez e

Robotics Research Labo-ratory
29
0
0
1 1
1
1 2
2
sin , 0( )
0 , 0
( ) sin
2
1 1 1
2 1 1
sin
1 2 cossin
2 cos 1
k
k
j kT j kTk
k
j T j T
kT ke k
k
E z kTz
e ez
j
j e z e z
z T
z T zz T
z z T
vi) Sinusoidal function

Robotics Research Labo-ratory
30
Remark: Refer Table 2-1 in pp.29-30 (Ogata)
Also, refer Appendix B.2 Table in pp. 702-703(Franklin)
0
0
1 1
1
1 2 2
2 2
cos , 0( )
0 , 0
( ) cos
2
1 1 1
2 1 1
(1 cos )
1 2 cos( cos )
2 cos
k
k k
k
j kT j kTk k
k
j T j T
r kT ke k
k
E z r kTz
e er z
e rz e rz
z r T
z T r zz z r T
z z T r

Robotics Research Labo-ratory
31
Correspondence with Continuous Sig-nals
s-plane z-planez=esT
( ) ( 2 )sT σ jω T σT jωT σT j ωT πkz e e e e e e
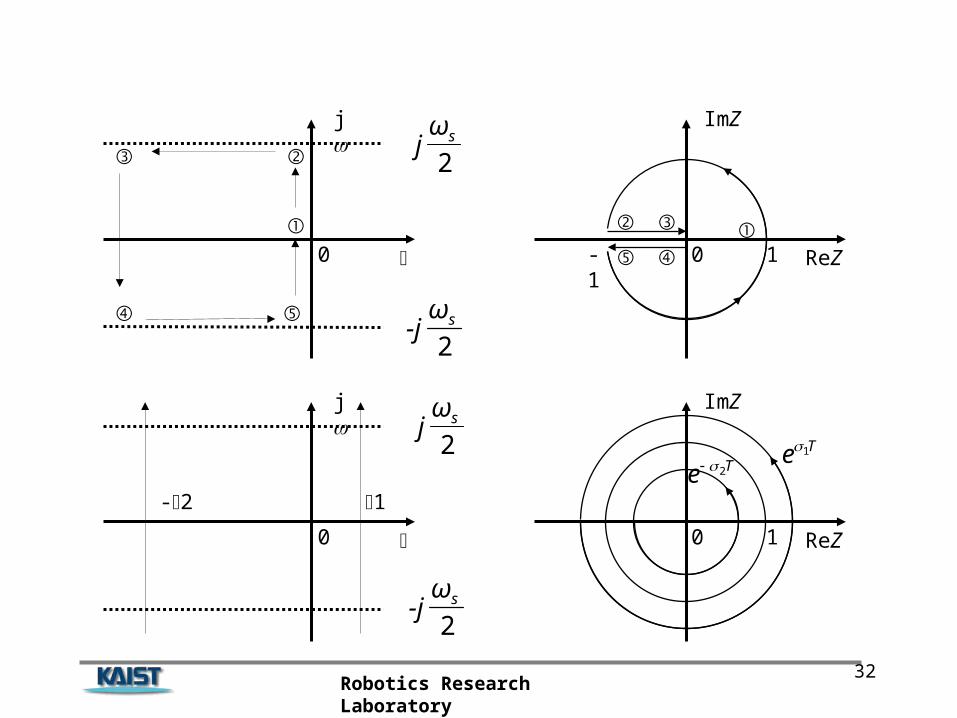
Robotics Research Labo-ratory
32
①
②③
④ ⑤
j
0
j
0
-2 1
ReZ
ImZ
①② ③
④⑤ 0 1-1
ReZ
ImZ
0 1
1Te2Te
2sω
-j
2sω
j
2sω
j
2sω
-j

Robotics Research Labo-ratory
33
j
0 ReZ
ImZ
0
fixed
j
0 ReZ
ImZ
1
2sj
2sj
2sj
2j1j
1j2j
TjTee 2TjTee 1
TjTee 1
2s
4
3 s
4s
s 0

Robotics Research Labo-ratory
34
Important Properties and Theorems of the z-transform
1. Linearity
1 2
1 2
1 2
1 2
1 2 1 2
( ) ( )
( ) ( )
( ) ( )
( ) { ( )}
Assume ( ) ( )
( ) ( ) ( ) ( )
k
k k
i i
αf k βf k
αf k βf k z
α f k z β f k z
α f k β f k
F z f k
αf k βf k αF z βF z
Z
Z{ } Z
Z
Z
2. Time Shifting
( )
( ) ( ) ,
( )
( )
k
j n
n
f k n f k n z k n j
f j z
z F z
Z
Robotics Research Labo-ratory
35
k
n k n
n
n k n
k
n nn k n k k
k k k
nn k
k
f k n f k n z
z f k n z
z F z
f k k
f k n z f k n z
z f k n z f k z f k z
z F z f k z
( )
( )
0
1 1( )
0 0 0
1
0
( ) ( )
( )
( )
If ( ) 0 for 0
( ) ( )
( ) ( ) ( )
( ) ( )
Z
Z

Robotics Research Labo-ratory
36
1 2 1 2( ) ( ) ( ) ( )f k f k l F z F z Z
4. Scaling
( ) ( )kr f k F rz Z
5. Initial Value Theorem
0 1 2( ) ( ) (0) (1) (2)
(0) lim ( )
k
k
z
F z f k z f z f z f z
f F z
2 2
)
( 1) ( ) (0)
( 2) ( ) (0) (1)
ex
x k zX z zx
x k z X z z x zx
Z
Z
3. Convolution

Robotics Research Labo-ratory
37
6. Final Value Theorem
k z z
F z z z F z
f k z F z z F z
1
1 1
If ( ) converges for 1 and all poles of ( 1) ( ) are inside
the unit circle, then
lim ( ) lim(1 ) ( ) lim( 1) ( )
1 2
1 2
11
11
1
1
1
)
( ) (0) (1) (2) ( )
( 1) (0) (1) ( 1)
( )
lim ( ) ( ) ( )
lim ( ) lim lim ( )
k n k
n
k n k
n
k n
n
k kn n
n nz
k n
nk k z
pf
f n z f f z f z f k z
f n z f z f z f k z
z f n z
f n z z f n z f k
f k f n z z
1
1 1
1 1
( )
lim ( ) ( ) lim(1 ) ( )
k n
n
z z
f n z
F z z F z z F z

Robotics Research Labo-ratory
38
1 1
11
11 1
)
( ) 1 0
1 1 ( ) z
1 1 ( ) 1
1 ( ) lim(1 ) ( ) lim 1 1
1
at
aTaT
aTz z
ex
f t e a
F z ez e z
f
zf z F z
e z
Remark: Refer Table 2-2 in p. 38.(Ogata)
Also, refer Appendix B.1 Table in p.701(Franklin)

Robotics Research Labo-ratory
39
T
Continuous-time domain
S-plane Z-plane
Discrete-time domain
LZ
- 1Z
( )r t *( )r t
*( )R s
sTz e
1( ln )s z
T
*( )R z

Robotics Research Labo-ratory
40
1 1
1
1 1
1) ( )
( 1)
( ) ( ) 1 , 0
1 1 ( ) 1
(1 ) (1 )
(1 ) (1 )
(1 )(1 ) ( 1)( )
t
tT
T T
T T
ex X ss s
x t X s e t
X z ez e z
e z e z
z e z z z e
- 1L
Z

Robotics Research Labo-ratory
41
T
T
Ts
T
s
s
Ts s
ex
e zX s X z
s s z z e
X sX z X s
z zs s
s s s sz e z e
z
z e
0 1
)
1 (1 ) ( ) ( )
( 1) ( 1)( )
( ) ( ) residue of at pole of ( ) ( )
1 1 lim lim ( 1)
( 1) ( 1)( ) ( )
( )
T
T
T
z z
z z e
e z
z z e
( 1) ( )
(1 )
( 1)( )
Remark: Refer the derivation of ( ) in pp. 83-85 (Ogata's)

Robotics Research Labo-ratory
42
Inverse z-transform
i) Power Series Method (Direct Division)
ii) Computational Method :
- MATLAB Approach - Difference Equation Approach
iii) Partial Fraction Expansion Method
iv) Inversion Integral Method

Robotics Research Labo-ratory
43
Example 1) Power Series Method
1 2
1
1 2
1 2
( ) (0) (1) (2)
1( )
2 1 1.5 0.5
1 2.5 3.252
(0) , (1) (2.5), (2) (3.25)2 2 2
U z u u z u z
T zU z
z zT
z z
T T Tu u u

Robotics Research Labo-ratory
44
Example 2) Computational Method

Robotics Research Labo-ratory
45

Robotics Research Labo-ratory
46
Example 3) Partial Fraction Expansion Method
1
1 2
1
1 1
1 1
1( )
2 1 1.5 0.5
1
2 (1 )(1 0.5 )
1 1 0.53
2 , 2
1 3( ) 4
2 2 2
k
k
T zU z
z z
T z
z z
A B
z zT
A T B
Tu k A B
Remark:
1
1( ) ( )
1kx kT a X z
az

Robotics Research Labo-ratory
47
Example 4) Inverse Integral Method :
1
( ) { ( )} ( )
1( ) ( )
2
( ) { ( )} ( )
1( ) ( ) ( )
2
st
c j st
c j
k
k
c
F s f t f t e dt
f t F s e dsj
F z f k f k z
f k F z F z z dzj
- 1
L
Z
Z
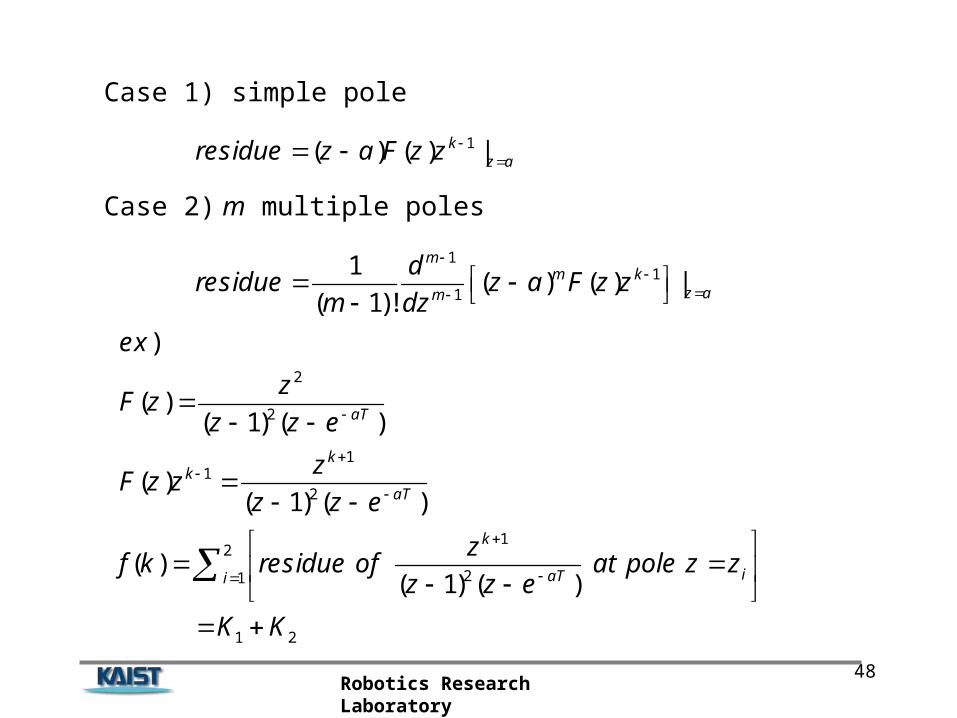
where c is a circle with its center at the origin of the z plane such that all poles of F(z)zk-1 are inside it.
1
1 2
-1( ) ( ) ( )
ik
m
i
m
f k residue of F z at pole z z of z F z
K K K
Robotics Research Labo-ratory
48
Case 1) simple pole
1( ) ( ) |kz aresidue z a F z z
Case 2) m multiple poles
11
1
2
2
11
2
12
21
1 2
1 ( ) ( ) |
( 1)!
)
( )( 1) ( )
( )( 1) ( )
( ) ( 1) ( )
mm k
z am
aT
kk
aT
k
iaTi
dresidue z a F z z
m dz
ex
zF z
z z e
zF z z
z z e
zf k residue of at pole z z
z z e
K K

Robotics Research Labo-ratory
49
1
1
2
( 1)
2
2
12
21
1
lim ( )( 1) ( )
(1 )
1
1 lim ( 1)
(2 1)! ( 1) ( )
lim
aT
aT
kaT
aTz e
a k T
aT
k
aTz
z
K residue of simple pole at z e
zz e
z z e
e
e
K residue of multiple poles at z
d zz
dz z z e
d
1
1
21
2
( 1) ( ) lim
( )
1 1
1 (1 )
k
aT
k aT k
aTz
aT aT
z
dz z e
k z z e z
z e
k
e e
Robotics Research Labo-ratory
50
1 2
( 1)
2
( )
1 1 , 0,1,2,
1 (1 )
a k T
aT aT
f k K K
k ek
e e

















