56
Robotics@Techweek’07
| Date post: | 26-Dec-2015 |
| Category: |
Documents |
| Upload: | russell-alexander |
| View: | 226 times |
| Download: | 1 times |

Robotics@Techweek’07

What is a Robot?
Electro-mechanical device.
Performs Various tasks.
May be human controlled or automated.
It finds it’s uses in all aspects of our life.

How a Robot Can Help ?
An automatic industrial machine replacing the human in hazardous work environment.
An automatic mobile sweeper machine at a modern home.
An automatic toy car for a child to play with.
A machine removing mines in a war field all by itself and many more…

Basic Parts of a Robot
Mechanical system
Power supply system
Actuators
Sensory devices for feedback
Sensor Data processing unit
Control system

Mechanical System
The most basic and important part of the robot.
It comprises of chassis, motors, wheels and their placement.
This system decides the locomotion of the robot.

Wheeled Locomotion Systems
Differential drive Car type drive Skid steer drive Synchronous drive Pivot drive

Differential Drive
This is the most commonly used form of locomotion system used in robots as it’s the simplest and easiest to implement.
It has free moving wheel(s) in the front accompanied with a left and right wheel. The two wheels are driven by different motors.

Differential Drive Cont…

Differential Drive: An Analysis
Simplicity and ease of use makes it the most preferred system by beginners
Independent drives makes it difficult for straight line motion. The differences in motors and frictional profile of the two wheels cause them to move with slight turning effect
The above drawback must be countered with appropriate feedback system. Suitable for human controlled remote robots

Car Type Drive
It is characterized by a pair of driving wheels and a separate pair of steering wheels.
The translation and rotation are interlinked, hence this system faces severe path planning problem.

Car Type Drive Cont…

Skid Steer Drive
A close relative of the differential drive system. It is mostly used in tracked machines e.g. tanks.
Also finds application in some four / six wheeled robots
The left and right wheels are driven independently.
Steering is accomplished by actuating each side at a different rate or in a different direction, causing the wheels or tracks to slip, or skid, on the ground.

Skid Steer Drive Cont…

Synchronous Drive
As the name suggests, it uses synchronous rotation of its wheels to achieve motion & turns
It is made up of a system of motors. One set of which drive the wheels and the other set turns the wheels in a synchronous fashion
The two sets can be directly mechanically coupled as they always move in the same direction with same speed

Synchronous Drive Cont…

Pivot Drive
The most unique type of Locomotion system
It is composed of a four wheeled chassis and a platform that can be raised or lowered

Pivot Drive Cont…
The wheels are driven by a motor for translation motion in a straight line
For rotation one motor is needed to lower/raise the platform & another to rotate the chassis around the platform
This system can guarantee perfect straight line motion as well as accurate in – place turns to a desired heading

Power Supply System
Suitable power source is needed to run the robots.
Robots are most suitably powered by batteries.
The weight and energy capacity of the batteries may become the determinative factor of its performance.


Actuators
They convert the electrical energy into meaningful mechanical work
Mechanical output can be rotational or linear (straight line)
Motors provide rotational motion
Electromagnets provide linear motion

Motors are of various kinds
AC Motors : Not used much in robotics
Stepper Motors : For controlled rotation
DC Motors : Finds extensive general use
Servo Motors : DC motor with in built feedback & error compensation

Stepper Motors Used for measured
rotation.
Can be held at a particular position of the shaft.
Ideal for many autonomous robots requiring higher precision.

Stepper Motor Working
0001001001001000Stepping Sequences for Single Coil Excitation
Only one coil is active at a given instant of time
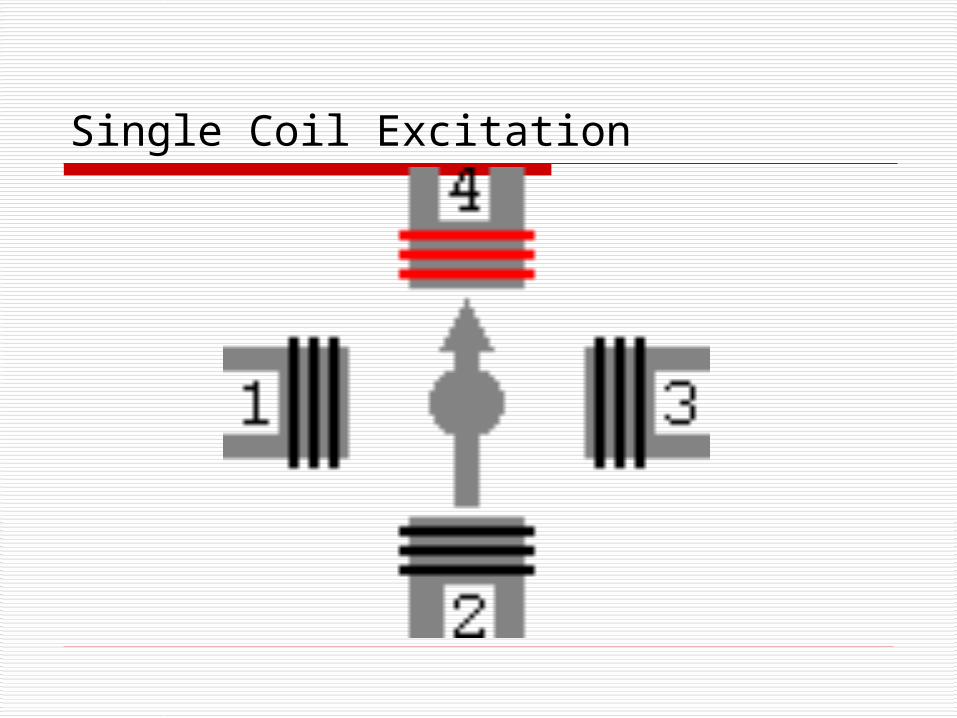
Single Coil Excitation

Stepper Motor Working Cont…
1001001101101100
Stepping Sequences for Double Coil Excitation
Two coils active at any given instant of time

Double Coil Excitation

Problems with Stepper Motors
Very low torque to weight ratio
Torque decreases with increase in the stepping frequency
For sufficiently high stepping speed the stepper motor may skip steps due to overshoot

DC Motors
As the name suggests, a motor which uses a DC (Direct Current) power
Can run in both directions
Speed Controllable

DC Motor Characteristics
DC Motors are high–speed, low-torque devices.
Using gears, the high speed of the motor is traded off into torque

DC Motor Drivers
These are current amplifying circuits.
A low current control signal is converted into a proportionally higher current signal that can drive the motor

DC Motor Direction Control
H – Bridge Circuit Diagram
S1
S3
S2
S4
M1 2
VCC
Power Transistor Switches

H – Bridge Working
S1 S2 S3 S4 Current Direction
Effect
1 0 0 1 1 to 2 Motor spins forward
0 1 1 0 2 to 1 Motor spins backward
1 1 0 0 - Braking Occurs
0 0 0 0 - -

Electronic Direction Control
H – Bridge Circuit Diagram
GND
VCC
NOT GATE
12Q1 Q3
A- +
DC MOTOR
12
LQ4Q2
R
NOT GATE
12


Open Loop Control System
There is no error correction. No way to check if the actuator was able to take the desired action
Simple system to design, not very reliable Requires regular calibration of the system
Controller Actuator
O/PDesired Action Controller Actuator

Closed Loop Control System
Desired Action Controller Actuator
O/P
Feedback

Example : An Air conditioner
Desired Temp. ControllerCooling Device
Room Temp
Temperature Sensor


Sensors
Analogous to human sensory organs Eyes, ears, nose, tongue, skin
Sensors help the robot knowing its surroundings better
Improves its actions and decision making ability
Provides feedback control

Examples
Light Dependent Resistor
Thermistor
IR Photo Sensor


Line Follower
A line follower is a robot capable of tracking a line drawn on a surface
Optical sensors capture the line position at the front end of the robot
The robot is steered to keep it always over the line
Click to view

Optical Reflectors

Sensor InterfacingVCC
R4
2K2
R21k
R4
2K2
Temperature Detector0
Digital O/P
Light Intensity Detector
Thermistor
R3
R5
10K
R6
5K
Digital O/P
VCC
LDR
D3IR LED
R21k
0
0
U3A
LM339
5
4
312
2
+
-
V+V-
OUT
R2100R
R6
5K
Digital O/P
8 - Bit ADC
R5
100K
Digital O/P
VCC
U3A
LM339
5
4
312
2
+
-
V+V-
OUT
0
Bump Detector
8 - Bit ADC
VCC
R3
IR Proximity Detector
D4Photo Diode


Delhi College of Engineering

DescriptionTasks and Arena

Embedded
Control Systems
Power
Mechanical Design

The Vehicle

Test and Performance





















