Page 1
Volker [email protected]
ROV Quest 4000m – Vessel Adaption and Deployment Schemes
Inmartech 08Toulon, Oct. 2008
ROV Quest 4000m –Vessel Adaption and
Deployment Schemes
Volker Ratmeyer, Marum, University of Bremen
Page 2
Volker [email protected]
ROV Quest 4000m – Vessel Adaption and Deployment Schemes
Inmartech 08Toulon, Oct. 2008
Range of system dimensions:• 4 - 7 ISO Containers• 15 - 38t winches / cables• 1 – 6t LARS or adaption to A-Frames• 3.5 to 4.8t vehicle• 45 – 90 t system weight
Typical crew demands (mobile systems):
• 6 – 10 pilots / technicians• 1-2 naviagtors• ships deck crew for deployments• 2 – 4 scientists (video, protocol, GIS)
Page 3
Volker [email protected]
ROV Quest 4000m – Vessel Adaption and Deployment Schemes
Inmartech 08Toulon, Oct. 2008
QUEST ROV System
- Vehicle: QUEST – ROV- MacArtney el. Umbilical Winch
5000 m NSW 17.6 mm cableweight 15.5 tons
- 20' control van- 20‘ workshop van- 2 20‘ transport vans- static deployment frame (LARS)
Vehicle
4 Containers
Winch
Page 4
Volker [email protected]
ROV Quest 4000m – Vessel Adaption and Deployment Schemes
Inmartech 08Toulon, Oct. 2008
Adaptedto german science vessels:RV MeteorRV Polarstern2008: RV Sonne2009: RV M. S. Merian
RV Meteor:Original scheme for systemconcept – vans, winch size, lars- 17 expeditions since 2003
QUEST System aboard german vessels
Page 5
Volker [email protected]
ROV Quest 4000m – Vessel Adaption and Deployment Schemes
Inmartech 08Toulon, Oct. 2008
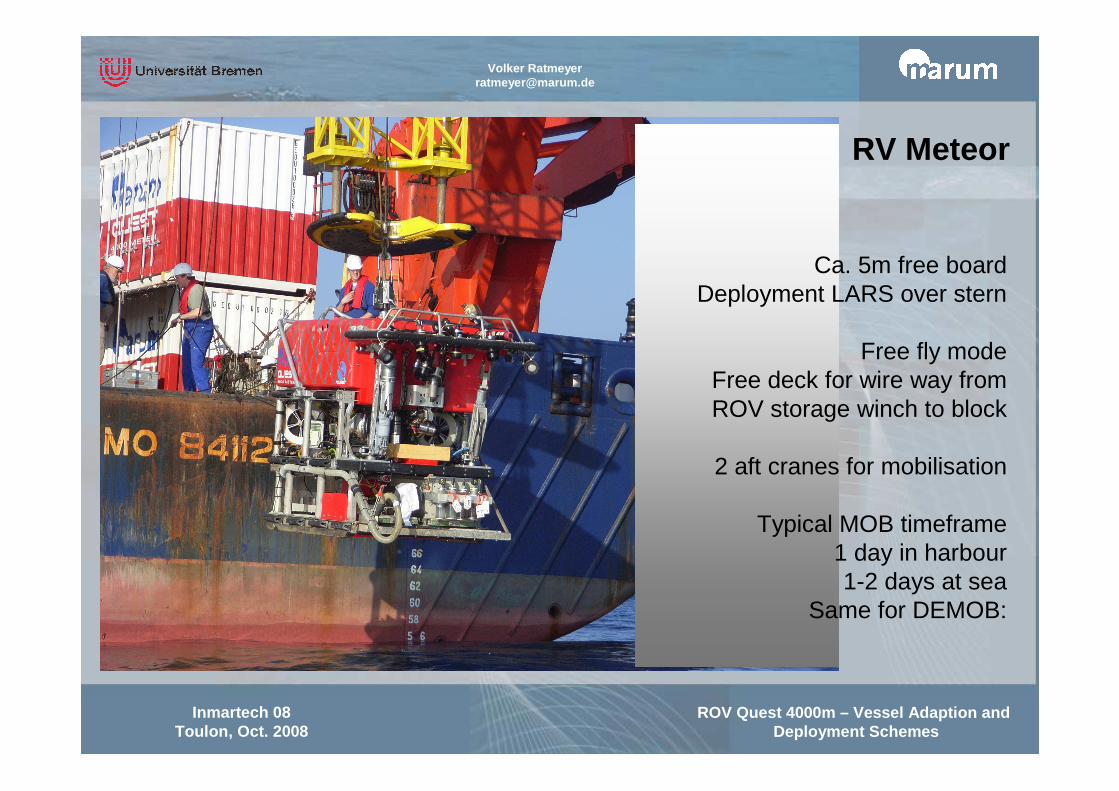
Ca. 5m free boardDeployment LARS over stern
Free fly modeFree deck for wire way fromROV storage winch to block
2 aft cranes for mobilisation
Typical MOB timeframe1 day in harbour1-2 days at sea
Same for DEMOB:
RV Meteor
Page 6
Volker [email protected]
ROV Quest 4000m – Vessel Adaption and Deployment Schemes
Inmartech 08Toulon, Oct. 2008
Free board 7m
Due to heavy weatherconditions: different deck
layout with guidance of wireand vehicle
RV Polarstern
Page 7
Volker [email protected]
ROV Quest 4000m – Vessel Adaption and Deployment Schemes
Inmartech 08Toulon, Oct. 2008
Free fly mode in pack-ice
Disadvantage:Risk of umbilical damage
through floating ice sheets
Advantage Ice slows down wave
movements and amplitudes
Net result –Good observed performanceswith precise ship movements
RV Polarstern
Page 8
Volker [email protected]
ROV Quest 4000m – Vessel Adaption and Deployment Schemes
Inmartech 08Toulon, Oct. 2008
Adaption of LARS to A-Frame:Using horizontal traverse withsidewinch for lifting, originally
built for VICTOR on Polarstern
Modular LARS designprooves well, only minimum
adaptions necessary, very lowcosts and prep. time
MOB time: 3 days in total forfirst time on Polarstern
RV Polarstern
Page 9
Volker [email protected]
ROV Quest 4000m – Vessel Adaption and Deployment Schemes
Inmartech 08Toulon, Oct. 2008
Deployment differs fromRV Meteor:
Angles, lift height, knucklejoints, deployment position
Major difference:Ships behaviour due to 11m
draft versus 5.5m draft –substantially higher heave at
stern
RV Polarstern
Page 10
Volker [email protected]
ROV Quest 4000m – Vessel Adaption and Deployment Schemes
Inmartech 08Toulon, Oct. 2008
Adaption of framethrough traverse
built for KIEL6000.
Small differencesproduce severesteup changes.
RV MeterorVs
RV Sonne
Page 11
Volker [email protected]
ROV Quest 4000m – Vessel Adaption and Deployment Schemes
Inmartech 08Toulon, Oct. 2008
Different lift winch setup – out of center.
Joints and axis produce high strengths not only on lift wire,
but umbilical!
Although modular, top part of LARS will be specially
adapted for RV Sonne.
RV Sonne
Page 12
Volker [email protected]
ROV Quest 4000m – Vessel Adaption and Deployment Schemes
Inmartech 08Toulon, Oct. 2008
Conceptual Line frombeginning: avoid extreme
winch weights and gain lowestpossible complexity.
Free flying OPs needs trainingfor pilots and crews duringlaunch and recovery, esp.
during weather
QUEST operational mode: free-flyer
Page 13
Volker [email protected]
ROV Quest 4000m – Vessel Adaption and Deployment Schemes
Inmartech 08Toulon, Oct. 2008
Video: Cable floats
Video: Recovery procedure
Page 14
Volker [email protected]
ROV Quest 4000m – Vessel Adaption and Deployment Schemes
Inmartech 08Toulon, Oct. 2008
Means extreme specificationfor the umbilical.
Ideally, over 4000m, cableMUST not turn once during
whole operation (up to 36hrs)
German cable prooved for226 dives over 4.5 years.
Free Flying Mode
Page 15
Volker [email protected]
ROV Quest 4000m – Vessel Adaption and Deployment Schemes
Inmartech 08Toulon, Oct. 2008
After 5 years a set of circumstances led to severedamage of the cables force
balance.
BUT – No data and no isolation loss at all during all
situations.
> Cable will be replaced withsame product.
Free flying Operation
Page 16
Volker [email protected]
ROV Quest 4000m – Vessel Adaption and Deployment Schemes
Inmartech 08Toulon, Oct. 2008
Advantage:-Much wider weather window.
-For dedicated operations, better cable management at
depth.
Heavy Workclassin Industry:TMS usage
Page 17
Volker [email protected]
ROV Quest 4000m – Vessel Adaption and Deployment Schemes
Inmartech 08Toulon, Oct. 2008
New technology, Highspeed, ultradeep, extra long ranges
(> 300m)
I.e.: Schilling type TMS
However:Y A R…… yet another robot
To be installed, operated, deployed, maintained and
transported. Plus cable.
Page 18
Volker [email protected]
ROV Quest 4000m – Vessel Adaption and Deployment Schemes
Inmartech 08Toulon, Oct. 2008
TMS use for ultradeep SCIENCEvehicles has to be carefullyevaluated.
Page 19
Volker [email protected]
ROV Quest 4000m – Vessel Adaption and Deployment Schemes
Inmartech 08Toulon, Oct. 2008
„Special Op‘s in Free flying mode….“
Page 20
Volker [email protected]
ROV Quest 4000m – Vessel Adaption and Deployment Schemes
Inmartech 08Toulon, Oct. 2008
Page 21
Volker [email protected]
ROV Quest 4000m – Vessel Adaption and Deployment Schemes
Inmartech 08Toulon, Oct. 2008
…Are possible without TMS,…At great depths,…If the vehicles has thenecessary propulsion power“
Page 22
Volker [email protected]
ROV Quest 4000m – Vessel Adaption and Deployment Schemes
Inmartech 08Toulon, Oct. 2008
Page 23
Volker [email protected]
ROV Quest 4000m – Vessel Adaption and Deployment Schemes
Inmartech 08Toulon, Oct. 2008
Simple LARS concept proved for 3 german vessels, 1 french vessel and will be operated on a 4th german vessel January 2009.
Same LARS design 1:1 already proved for 2 different fullsize vehicles(QUEST and KIEL6000)
Free fly mode chosen in Germany in conjuction with high poweredvehicles.
Both attempts in design proved to support a fast and modular inter-operability.
Suggestive question….Are there already common minimum requirements defined for theexisting fleet of vehicles to support also other existing and comingvessels?
Conclusions