26
SDK 5 hands-on" From CCS development environment up to Linux tips and tricks” 1

SDK 5 hands-on" From CCS development environment up to Linux tips and tricks”
1

This morning session
• Put you hands on!
IS IS NOT
• Demo AM335x using Beaglebone • Linux training
• Configuring development environment
for AM335x• Device Driver detail
2
for AM335x• Device Driver detail
• Building your first AM335x program • Android or WinCE
• Exploring Linux SW beside SDK5 • AM335x product training

AM335x software solutions
• Complete Linux software development kit
• Based on Linux kernel 3.1
• Integrated support for WL1271 WiFi/BT
• Includes easy to navigate launcher GUI based on QT/HTML5.0
• Gingerbread based SDK
• Graphics accel for optimal performance
• arowboat.orgcommunity
• RowboPERFbenchmarking application
AndroidStarter
Ware
• Windows Embedded
Compact 7 SDK
• Full support for ARM
v7 instructions
provide greater
Cortex-A8
performance
• 3D graphics SDK
integrated
• OS free programming tool
• Easily migrate from MCU code compatibility with Stellarisware
• Peripheral and graphics libraries
• USB and networking stacks
• Broad support for numerous RTOS including QNX and Integrity
• Mentor Graphics, Ittiam, VisualONsolutions for both graphics and video
• Commercial Linux, Android, WinCE customization options
Linux WinCERTOS
3P
WAREStarter
QT/HTML5.0
• Graphics and video demos, benchmarks, real-time comparisons
• Pre-integrated ARM video Codecs
• Integrated Flash Support
• Example
applications
• Code examples
• Small memory footprint
• Optimized for low latency
options
• Solutions for PRU development and system optimization
Available for free via www.ti.com
3
Selecting Linux as OS
• You’re set on Linux based Kernel, what is the next move ?
• Build Everything yourself
– You know and control everything what’s inside
– Can be long and painful– Can be long and painful
– Everything/every little bits need to be recompiled
• Use a pre-made Distribution
– You know what’s inside
– Better time-to-market
– Package management
4

• TI changed internal development to GIT (mainstream, mainline Linux) in early 2008
• Selling points:
– TI is setting the standard for the EP industry
– Customer Board ports
TI & linux as key selling point
– Customer Board ports easier
– Not the usual suspects on this list…
5

What Is a ‘Linux Distribution’A ‘Linux distribution’ is a combination of the components requiredto provide a working Linux environment for a particular platform:
1. Linux kernel port
� BSP,LSP, PSP = Linux kernel port to a platform, not just a set of device drivers
2. Bootloader
� Eg : U-boot is the standard bootloader for ARM Linux
3. Linux ‘file system’3. Linux ‘file system’
� This does NOT mean a specific type of file system like FAT file system or flash file system … rather, it is more like the “C:\” drive in Windows
� It refers to all the ‘user mode’ software that an application needs such as graphics libraries, network applications, C run-time library (glibc, uclibc),
4. Development tools
� Code Sourcery - GCC, GDB
� CCSv5, GHS Multi, etc.
6

Linux Distributions
Windowing System
OfficeSuite
Browser
• Linux distributions supporting TI ARM MPU Community boards : Angstrom, Ubuntu, Fedora, Android,
Gentoo, ARMedslack and ALIP or Arago
• WindRiver, MontaVista ,Timesys provide commercial (i.e. production) distribution for TI’s ARM MPUs
Kernel
System
• Linux distributions supporting TI ARM MPU Community boards : Angstrom, Ubuntu, Fedora, Android,
Gentoo, ARMedslack and ALIP or Arago
• WindRiver, MontaVista ,Timesys provide commercial (i.e. production) distribution for TI’s ARM MPUs
7
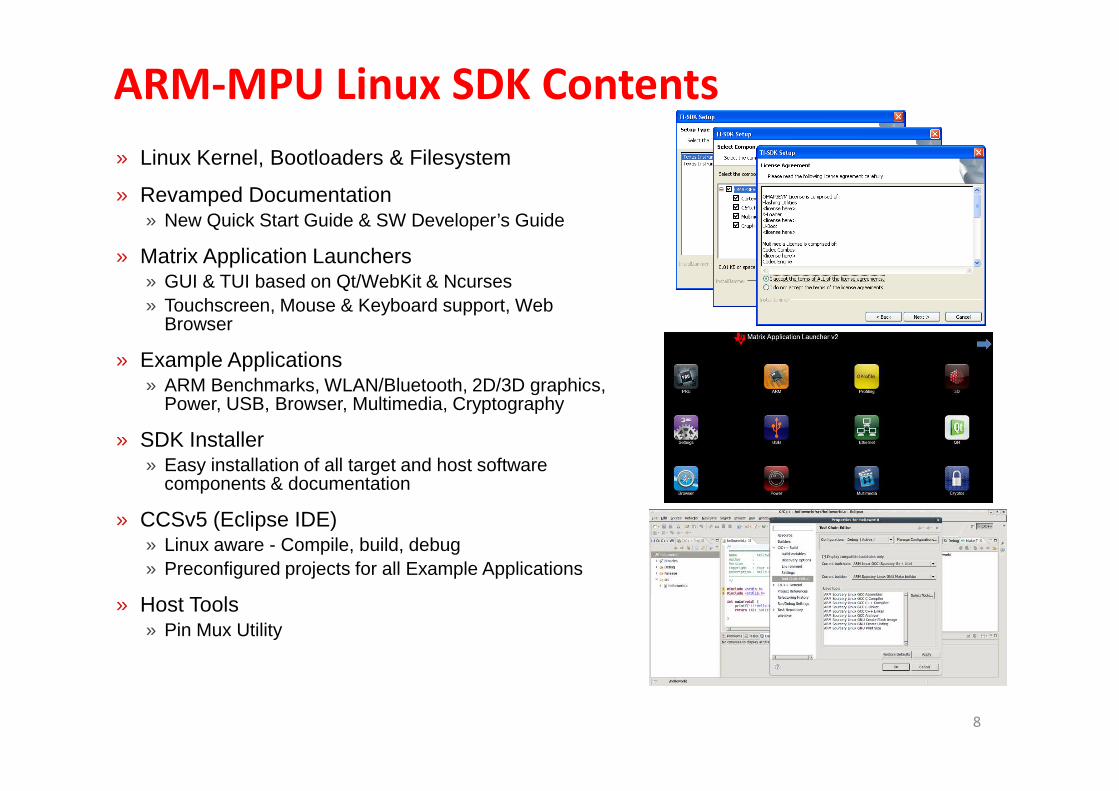
ARM-MPU Linux SDK Contents
» Linux Kernel, Bootloaders & Filesystem
» Revamped Documentation» New Quick Start Guide & SW Developer’s Guide
» Matrix Application Launchers» GUI & TUI based on Qt/WebKit & Ncurses» Touchscreen, Mouse & Keyboard support, Web
Browser
» Example Applications» ARM Benchmarks, WLAN/Bluetooth, 2D/3D graphics,
Power, USB, Browser, Multimedia, CryptographyPower, USB, Browser, Multimedia, Cryptography
» SDK Installer» Easy installation of all target and host software
components & documentation
» CCSv5 (Eclipse IDE)» Linux aware - Compile, build, debug» Preconfigured projects for all Example Applications
» Host Tools» Pin Mux Utility
8

SDK Goal : Be able to Develop
9

• Typical Connectivity– Target vs Host
– TFTP & NFS
• Virtual Machine– VirtualBox or VMWare
– Shared Folders or Samba
– USB SD card reader
SDK Development Environment
– USB SD card reader
• Ubuntu 10.04 LTS
• GCC compiled within Arago
• SDK Installer
• Code Composer Studio v5
10

Setup Script
1. <prompt$> sudo ./setup.sh
2. Install Ubuntu host packages
3. Untar Target Filesystem
4. Setup Network Filesystem
5. Setup TFTP Root Dir
6. Setup Minicom
7. Configure Uboot
8. Load Uboot Settings
11

Next SDK Goal : OOBE
12

Matrix GUI Application Launcher
• HTML5 based user interface
• Exercise peripherals and see
immediate benchmark and
performance results
• Easily add your own stuff and
exercise it using CCSv5
• Starts up on EVM power up• Starts up on EVM power up
• Output to
• LCD / external monitor
• or remote display via network
connection
• Launch applications and navigate
with touch screen or mouse
13

ARM Microprocessor Benchmarks• End users can run benchmarks on their target platform under their own conditions
• Details of architecture and compiler performance
• The ARM Benchmarks are small benchmarks targeting specific performance concerns– Dhrystone: Raw CPU speed, generally targeted for control processor activities– Whetstone: Double precision floating point– Linpack: Single precision floating point, it could also be re-built for double precision floating point
analysis
• All the above benchmarks fit entirely into L1 cache, so once loaded into cache, they are really measuring raw CPU speed.
• None of the benchmarks utilize NEON.– In order to use NEON, the benchmarks would have to be re-written.– Generally these well known benchmarks are intended to run as-is.
CPU ClockSpeed Dhrystone Whetstone Linpack
300 MHz 1.9 DMIPS/MHz 172.4 MWIPS 10719 Kflops
600 MHz 1.9 DMIPS/MHz 357.1 MWIPS 21437 Kflops
800 MHz 1.9 DMIPS/MHz 454.5 MWIPS 28353 Kflops
1 GHz 1.9 DMIPS/MHz 555.6 MWIPS 36622 Kflops
Source: http://www.netlib.org/benchmark/
Performance results for different OPP settings
14

Example Applications• USB Profiler
– Measurement of USB throughput via Bonnie++ benchmark
• Power Manager
– Provides details of power applications integrated into the Matrix GUI,
along with helpful command line equivalents.
• Cryptos
– Enables AES/3DES/SHA/MD5 cryptography and examples– Enables AES/3DES/SHA/MD5 cryptography and examples
– Utilizes the open source Open Crypto Framework and OpenSSL APIs
• Multimedia
– Enables ARM/Neon based multimedia codecs including H.264, MPG4 and
AAC
– Utilizes GStreamer and FFMPEG
15

Pin Mux Utility• Designed for scalability
and device independence
• Imports device information to parse and populate the tool
• Identifies pin mux conflicts and configure conflicts and configure pad IOs
• Save & load board configurations
• Generates uboot source code for the selected pin mux & pad configuration
16

Running servers
Here is a list of some of the running servers:
• ssh (port 22) - for access to a shell
• bone101 (port 80) - small server written in node.js serving up an intro
presentation
• GateOne (port 443) - access to a shell through Firefox or Chrome
• Cloud9 IDE (port 3000) - text editor and debugger for node.js applications • Cloud9 IDE (port 3000) - text editor and debugger for node.js applications
through Firefox, Chrome or Safari
17

The SD Card
• Boot (vfat partition 1)
– MLO
– uEnv.txt
– u-boot.img
– uImage
– windows_users.htm
– quickstartguide.pdf
• rootfs (ext3 partition 2)
SDK 5 Directory Structure
• rootfs (ext3 partition 2)
– the untarred rootfs
• START_HERE (ext3 partition 3)
– setup.htm
– ccs_install.sh + CCS dir.
– ti-sdk-am335x-evm-05.03.00.00-Linux-x86-
Install
– beaglebonequickstartguide.pdf
– START_HERE.sh
18
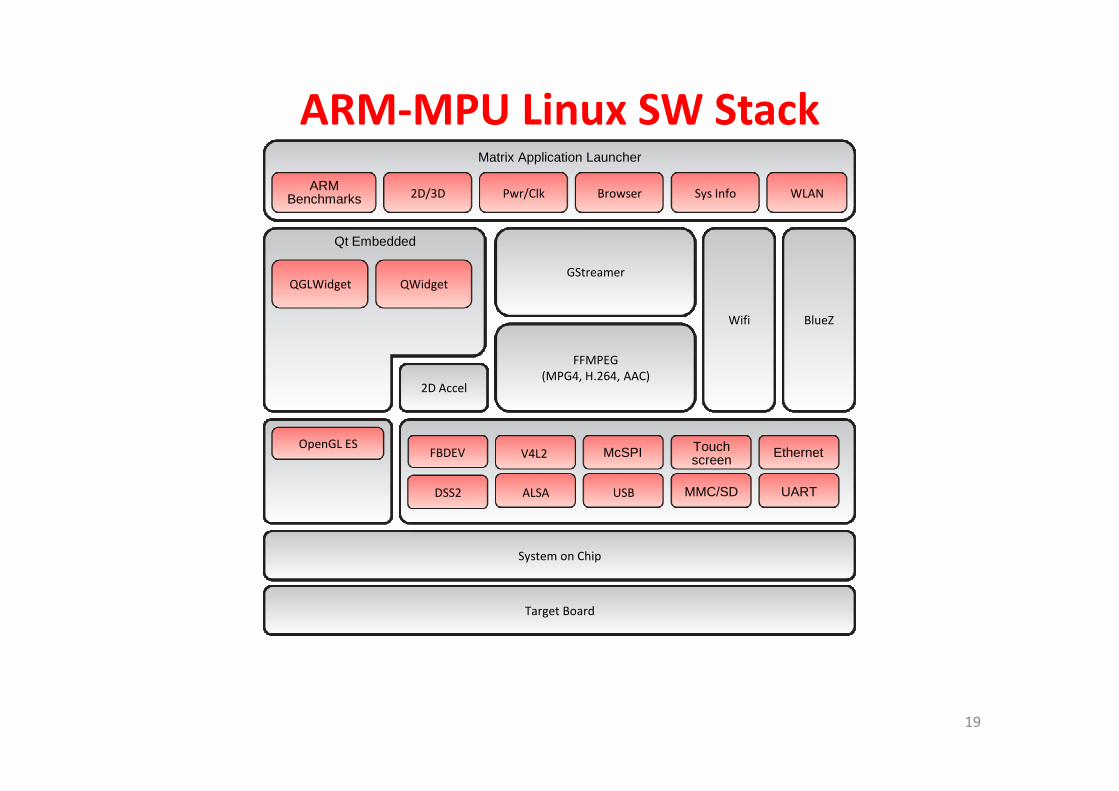
Matrix Application Launcher
2D Accel
Qt Embedded
QWidgetQGLWidget
ARM Benchmarks Pwr/Clk Browser Sys Info2D/3D
BlueZ
GStreamer
FFMPEG
(MPG4, H.264, AAC)
Wifi
WLAN
ARM-MPU Linux SW Stack
OpenGL ES
System on Chip
Target Board
FBDEV
DSS2
V4L2
ALSA
McSPI
USB MMC/SD UART
EthernetTouchscreen
19

RS232
Putty
BeagleBone Development Environment
• CCS supports both Windows and Linux host PCs
• Linux application debug supported via integrated GDB
• Linux kernel debug supported via JTAG debug
LAN
Gdbserver on target linux
Putty
LAN JTAG
CCS
LAN
Gdb on CCS
20

CCSv5 Features & Plugins
» Eclipse based - v3.7
» Runs on the Linux host
» Multi-Core Debug
» Run-Mode Linux debug support » Remote GDB debug
» Debug your Linux application and application processes » Debug your Linux application and application processes
» Stop-Mode Linux Support» Control target using JTAG
» Enables examination of target and current Linux process
» Requires installation of emulator package
» Linux & Embedded Development Eclipse plugins» GNU ARM Toolchain plugin
» Qt Integration plugin
» Remote System Explorer plugin
21

CCSv5 – Remote System Explorer (RSE)
• Target Management plugin
• Configures and manages
remote systems,
connections & services
– Drag-and-drop access to – Drag-and-drop access to
remote file system
– View remote shell and
terminal
– Monitor remote process
table
22

CCSv5 – Debugging Applications• Linux debugging is enabled using
gdbserver
• GDB and gdbserver communicate via a TCP connection
• Requires configuration of GDB on both host and target
• To debug a project, gdbserverwith port number 10000 (defined during configuration) should be initialized
• Regular debugging functions like Breakpoints, Step Over and Step Into can be used to walk through the source code
23

Несколько слов о GDB...• GDB (GNU debugger) может облегчить рутинную отладку приложений на встроенных Linux-
системах.
• Чем полезен GDB: гораздо удобнее и правильней отлаживать программу, чем слепо гадать,
в каком месте происходит ошибка.
• Суть использования GDB состоит в том, чтобы запускать на целевой платформе не
полноценный GDB, а GDBserver. GDBserver позволяет запускать отладчик на другой машине,
отличной от той, где работает приложение. Преимущество использования GDBserver
состоит в том, что он использует лишь малую часть ресурсов, так как реализует лишь состоит в том, что он использует лишь малую часть ресурсов, так как реализует лишь
низкоуровневые функции отладчика, а именно установку точек останова (breakpoints),
доступ к регистрам процессора и чтение/запись памяти. GDBserver берет управление
приложением на себя и ожидает инструкций от удаленного GDB (работающего на машине
разработчика).
• Обычно процессор на рабочей станции разработчика (к примеру, x86) отличается от
процессора на целевой платформе (ARM, etc).
24Ссылка на источник:http://rus-linux.net/lib.php?name=/MyLDP/algol/gdb-remote.html
» Direct access to Factory Applications teams
» Quality answers from TI, Partners & Community Participants
» Search First -
E2E Forums - e2e.ti.com
» Search First -Customers may find answers to their questions without asking
25

TI Embedded Processors.Wiki.ti.com
26

















