42
Senior Design Book Fall 2018

Fall 2018
Senior Design Book
Fall 2018

Building the Functional Engineer
When engineers and technologists graduate from NIU, they are ready to walk into their new jobs and get
right to work. That’s because we are committed to giving students the tools and experience to be functional
engineers. From the start, they are exposed to real-world, everyday problems they must solve by putting
theory into practice.
Senior Design is the culmination of this experience. This is senior students’ chance to prove they have
learned; more formulas and theories, to identify a problem and innovate a solution, to build a prototype, and
to communicate their ideas. This book describes the Senior Design projects of the Fall 2018 senior class.
Congratulations to our seniors. Whether you are continuing your studies in graduate school or stepping into
the workforce, you are a proud representative of NIU and your future success is a testament to
#WhyEngineering.
#WhyEngineering #SeniorDesign
Bridging Theory with Practice

Electrical Engineering
Automatic Resistor Sorter Nathaniel Ambler, Joshua Kitterman, Zhaobang Xue, Robert Widick Project Advisor: Mr. Edward Miguel
URI-DOC Dominick Glatz, Nelson Pena Rodriguea, Kurt Widhalm Project Advisor: Dr. Venumadhav Korampally
Big Data Weather System Nicholas Marc, Michael Niewinski, Ellen Schwarzwalder Project Advisor: Dr. Wei Li
Free Flow Fahad Balateef, Muhammed Diallo, Nasiruddin Jamali, Rashed Alghayadh Project Advisor: Dr. Donald Zinger
Design A Solar Panel for the Glidden Museum Salman Alzobidy, Alexander Savitt, Majed Alanazi, Joshua Nilles Project Advisor: Dr. Donald Zinger
3D EM Tracking (3D Stylus) Donald Krambeck, David Dobrzynski, Daniel Graunke, James Shulgan Project Advisor: Dr. Veysel Dimir
Leap Motion Sign-language Translator Murray Fordyce, Andrew Murphy, Marianne Gueieb, Peter Cole, Stephen Binderup Project Advisor: Dr. Donald Peterson
NIU CEET Antenna Measurement Set-up Mary ChristelleAnn Calacal, Brandon Palfalvi Project Advisor: Dr. Veysel Dimir
Projects By Department

Mechanical Engineering
Arc Jet Malachi Vachon Fischer-Porter, Daniel Bruce Trygstad, Michael Joseph Zawadzki Project Advisor: Dr. Donald Peterson
Perfusion Bioreactor Giovanni Garcia, Dominique Cecile Greeno, Fabian Carlos Gutierrez, Giovanni Pacheco, Ryan Paggao Project Advisor: Dr. Sahar Vahabzadeh
Haptic VR Anna Raoling Green, Nicholas A. Napolitano, Joseph Vincent Sarna, Robert William Steiner Project Advisor: Dr. Sachit Butail
Custom Brake Cooling System Daniel Adam Freigo, Adam Matthew McNally Project Advisor: Dr. F. Sciammarella
CAT 836K cleaner finger optimization (Sponsored by Caterpillar Inc.) Solomon James Sawlaw, Justin Thomas Clausen, Dakota Krokosz, Nicholas Dean Weaver Project Advisor: Dr. Iman Salehinia and Dr. F. Sciammarella
SBICM Flavio Jonuzaj Sr., Matthew James Lueck, Brandon Matthew McTaggart, Harsh M. Patel Project Advisor: Dr. Bobby Sinko
Oxygen assitance device for SCUBA Hamad Yousef Alghayadh, Khalid Abed S. Almehmadi, Mustafa Altermathy, Nathan James Zellak Project Advisor: Dr. Kyu Taek Cho
Semi-Autonomous Lake Monitor (Sponsored by IDEAL) Ian Jeffrey Kidd, Mhariel Valmadrid Pastrana, Ian Daniel Schabel, Benjamin Joseph Ziegler Project Advisor: Dr. Ji-Chul Ryu
Freedom Project Catherine Ann Canciamille, Jennifer Robles, David Andrew Williams Project Advisor: Dr. Sachit Butail
Projects By Department (continued)

SRCV - Sewer line cleaning vehicle Mark Daniel Alvord, Eric Angel Garcia, John Mateusz Nowobilski, Miguel Rodriguez Jr., Ryan Darryl Smith Project Advisor: Dr. Ji-Chul Ryu
Humidifying Incubator Shaker David Michael Kaliniec, Erick Miguel Gonzalez, Collin Blake Seidelman Project Advisor: Dr. Sahar Vahabzadeh
Shadow Track (sponsored by Shadow Track) Benjamin Cuauhtemoc Bentley, Mark Benjamin Lafrentz, Daniel Nevarez, Benjamin James Starcevich Project Advisor: Dr. Ji-Chul Ryu
Hybrid Collector Anthony Greco, Timothy Joseph Jackimek, Johnathan Christian Oberlander, Samuel James Schmalz I, Arsensio Young Sun Aguilera Project Advisor: Dr. F. Sciammarella
Mobile Dynamometer Station for STEM Outreach (sponsored by Genesis Automation) Kyle Thomas Sullan, Ryan Michael Bielman, Jeffrey Thomas Good, Michael Vincent Koeplin Project Advisor: Dr. F. Sciammarella
Project Icarus Amro Abdulmutalib Shanshal, Patrick Daniel Maglaya, Joshua E. Marble, Oscar Barba Project Advisor: Dr. Brianno Coller
Industrial & Systems Engineering Increasing productivity of the Stone Assembly line at SPX FLOW (Sponsored by SPXFLOW) Abdullah Alhajji, Sonja Marquette Project Advisor: Dr. Purush Damodaran and Dr. Christine Nguyen
Designing a cell for LPC Metering (Sponsored by WOODWARD) Gilbert Bwetabure, Joshua Moore, Parth Thakkar Project Advisor: Dr. Purush Damodaran and Dr. Christine Nguyen
Projects By Department (continued)

Technology
Spectrometer (Sponsored by LEDIL) Jason Kors, Christian Morales, Kamil Polniak Project Advisor: Dr. Mills and Dr. Martin
Weber Grill Annalyssa Bell, John Mayer, Erik Osterby Project Advisor: Dr. Andrew Otieno
Electronic Knee Walker Farhan Alghamdi, Arturo Avila, Isaias Cervantes, Stephen Slager Project Advisor: Dr. Ted Hogan
Auto Water Spray Booth Tim Fisher, Mike O' Malley, Erich Wenzel Project Advisor: Dr. Rao Kilaparti
Interdisciplinary (Mechanical & Electrical)
CIS Mobility Michael Bockwoldt, Michael David Duda, Hnin Eaindray Lin, Matthew Joseph Martone, Jazael Medina, Nathan Alexander Luptak, Fahad Mohammedhussein, Mary Carter, Mark Pacyga, William Dedic Project Advisor: Dr. Donald Peterson
Magnetic Pulse Welding (Sponsored by UTC Aerospace Systems) Eric Walchli, Syed Sabeel Hasan, Lauren Anderson, Jeremiah Rodriguez Project Advisor: Dr. Eric Karlen and Dr. Donald Zinger
Projects By Department (continued)

Electrical
Engineering

Team Members: Nathaniel Ambler, Joshua Kitterman, Robert Widick, Zhaobang Xue
Project Advisor: Mr. Edward Miguel
Automatic Resistor Sorter
Sorting piles of unknown or misplaced
resistors can be a real mind-numbing
task. Measuring resistor values using a
multi-meter or color codes can be time
consuming and inaccurate. A device that
would allow the user to accurately
measure and sort such values quickly and
efficiently could not only save time, but
money as well.
Problem Statement
• Ability to accurately read resistor
values with <1% error using a
custom designed ohmmeter
• Fast and efficient sorting method (2-
3 second sorting time per resistor
read)
• Create a user interface that is
seamless and user friendly
• Device should be portable in size
and fit on a small table or countertop
Design Tasks
The custom ohmmeter allows for
accurate resistor reading with <1% error.
The user interface allows for profiles to
be created with up to 8 resistor values to
use for sorting. The compact design and
simple interface allows for hobbyists and
lab technicians to setup and operate the
device with ease.
Final Design/Deliverables
With no similar product on the market
currently, the Automatic Resistor Sorter
would be immediately marketable. Cost
of production for the prototype model
slightly exceeded our expected budget
of $150. A final production of the device
could be expected to cost $75 - $125,
allowing for an economic sorting
implementation.
Business/Cost Analysis
Image #2
include labels and explanations of
what we are seeing
Fall 2018
CAD model Circuit schematic

Team Members: Dominick Glatz , Kurt Widhalm, Nelson Rodriguez
Project Advisor: Dr. Korampolly
Uri-DocUrinalysis Diagnosis On-Command
Problem Statement
The goal is to create a device which
takes a noninvasive sample from the
patient and analyze it for signs of
illness. This can be done by assessing
color of the sample, such as in a
spectrometer. As the absorbance band
of our target substance increases, the
need to seek treatment also increases.
Salinity and pH of the sample may be
used as a reference to better diagnose
the cause of illness.
Design Tasks
Final Design/Deliverables Business/Cost Analysis
Fall 2018
Figure 2. Absorbance Circuit
Prototype
How can we quantitatively measure
kidney health? Illnesses of the kidneys
necessitate dialysis to remove toxins.
However, dialysis is a lengthy and
expensive treatment. By measuring
urine pH, salinity, and testing for the
presence of Blood, we can help
physicians schedule dialysis
treatments for patients living far from
a medical facility.
In our final product, we were able to
detect the biomarker Hemoglobin, a
protein present in blood, using specific
light absorbance. In concurrence with
pH and salinity, this data can be used
to determine if a patient’s kidneys are
damaged, or if they require dialysis.
The goal was to create a device which
could diagnose kidney damage for less
than the cost of a physical exam. Data
obtained by our device will serve
physicians by suggesting care if the
results are out of a healthy range.
Cost: $153.34
Figure 3. Light absorbance of Hemoglobin, Pure and Doped w/ Yellow #23
Figure 1. 3D Model of Final Device

A97-B101-C103
Team Members: Nicholas Marc, Michael Niewinski, Ellen Schwarzwalder
Project Advisor: Dr. Wei Li
Big Data Weather System
Research grade weather stations are
too costly to be able to place in
concentrated areas. This leaves large
coverage gaps in weather data.
Current alternatives such as
commercial data networks and at
home weather station networks do
not adequately solve this issue.
Problem Statement
Design a low-cost, high accuracy
weather station that can be placed in
concentrated and coordinated areas
to create a network, allowing for
mass data collection. Station must
be able to power itself and must
have access to communications.
Design Tasks
Designed a weather station
consisting of group designed
pyranometer, aspirated radiation
shield, wind speed and direction
sensors, power system with solar
panel, that is controlled by a
microcontroller, and uses WIFI.
Final Design/Deliverables
Big Data is a growing industry that
in 2016 was a 130-billion-dollar
industry. The data from our weather
station, could be packaged and sold
to researchers, government entities,
and businesses interested in
analytics.
Business/Cost Analysis
Fall 2018
Level 1 Design of BDWS. This shows how all the major components of the BDWS interact.
Shows how BDWS network can fill in large uncovered areas from systems like the ASOS.

Team Members: Fahad Balateef, Muhammed Diallo, Nasiruddin Jamali, Rashed Alghayadh
Project Advisor: Dr. Donald Zinger
Free-Flow
Frozen pipes can cause sever damage
to homes accompanied by costly
repairs. Current market solutions are
expensive and not always reliable.
With our project Free-Flow we hope
to provide a reliable and cost-
effective solution to give home
owners a peace of mind.
Problem Statement
• Prevent pipes from freezing
• Monitor the temperature of
pipes within the home
• Simple setup and operation
• Reliable solution
• Cost and Energy efficient
Design Tasks
• Radio frequency system that is
integrated with temperature
sensors and flushing actuator
• Power reliability through multiple
device powering options
• Operates in different homes
Final Design/Deliverables
• Cost around $25 to make (per set
of 3)
• Sell for $50
• Save on energy bill
• Save hundreds of dollars in
repairs
Business/Cost Analysis
Fall 2018
Middle RF
communication
(Node MC)
Temperature
Sensor
(Node TS)
Flushing Actuator
(Node FA)
Node(s) TS senses the temperature and RF
communicates with Node MC. When temp nears
freezing, then Node MC communicates with Node
FA to flush the toilet. Causing the water in the
pipes to circulate and not freeze.
An example representation where the different
nodes will be placed within a home.

Team Members: Salman Alzobidy, Alexander Savitt, Majed Alanazi, Joshua Nills
Project Advisor: Dr. Donald Zinger
DESIGN A SOLAR PANEL MICROGRID FOR THE GLIDDEN MUSEUM
The Glidden family has reached out to
NIU requesting assistance into a
renewable energy source for their newly
renovated museum. Also, Dr. Zinger has
requested a low voltage inverter that he
can use in his lab.
Problem Statement
• Design solar panel microgrid that
capable of running the museum
• Provide alternative options for the
energy storage
• Build prototype for our microgrid
• Design control system for the
prototype
• Design a low voltage DC/AC
inverter with input 12Vdc and output
120Vac
• Build the low voltage inverter
Design Tasks
For the final design, there are three
energy sources: solar panels, battery
storage and the A/C power grid. The
main source of energy is the solar panels.
The design of the solar panels is to
provide the museum with enough power
to properly function for the entire year.
In the event the solar panels do not
produce the needed power, the museum
will be powered by the battery storage.
The microgrid will also be connected to
the A/C power gird as an additional
power source. With the project in hand,
the DC to AC low voltage inverter is the
combination of the doublar voltage
design and H-bridge design given the
input of 12V D/C and an output of 120V
A/C.
Final Design/Deliverables
Business/Cost Analysis
System, component and load design DC/AC low voltage inverter design
Fall 2018
The cost for DC/AC low voltage inverter
approximately was 171.75.
Component Price
Solar Panels $98910
Battery Storage $52867.7
MPPT $725.84
DC/AC Inverter $2250
2 DC/DC Buck Converter $1000
DC/DC Boost Converter $500
Total $ 156254

Team Members: David Dobryznski, Daniel Graunke, Donald Krambeck,
James Shulgan
Project Advisor: Dr. Veysel Demir
3D Electromagnetic Tracking
The majority of modern 3D graphic
design is done by either manipulating
2D drawings to create 3D models or
using digital sculpting software. We
aimed to fill the current market gap for
an affordable and intuitive tool that
would create digital free form 3D
sketches drawn directly in physical 3D
space.
Problem Statement
● Must be able to detect stylus within
a 6 x 6 x 4 in. volume.
● Accuracy of digital stylus position
must be within 3 mm.
● 3D tracking must be within 15-20
ms between actual and digital
stylus position.
● Stylus incorporates two buttons for
an easy to use and intuitive
experience.
Design Tasks
3D stylus uses a 125kHz voltage
signal to induce a voltage across an
array of 36 sensor coils through EM
induction. These voltages are
measured by the Arduino and used
by Processing to determine the
position and movement of the pen.
Final Design/Deliverables
Cost for production can remain
under $100.00. Our project utilized
educational benefits for enclosures
and stylus which would vary end
cost. This proof of concept can
extend to multiple facets of tracking
technology as well as provide an
intuitive tool for Graphic Designers
and 3D modeling.
Business/Cost Analysis
Fall 2018
Figure 1. Envisioned Product Figure 2. Signal Transmission and Detection

Team Members: Stephen Binderup, Peter Cole, Murray Fordyce,
Marianne Guieb, Andrew Murphy
Project Advisor: Dr. Donald Peterson
Leap Sign Language Translator
People living with disabilities require
consistent and intuitive means to
communicate. Our client is a high
school student in Paw Paw living
with dystonia. We have been tasked
with creating a communication
solution to enable her to participate
in class, and socially with her peers.
Problem Statement
Our client’s preferred method of
communication is the American
Sign Language (ASL) alphabet. To
make our solution most natural for
her, we wanted to design around
this. The main goal of our project is
to create an interface that translates
hand gestures into letters, macros,
or commands
Design Tasks
Final Design/Deliverables
Using a Leap Motion Controller, our
system takes in spatial data about the
user’s hands. This is then processed
with an AI model that determines
which gesture was probably made,
based on previously trained examples.
Our device functions standalone or as
a peripheral to a computer.
The importance of communication
to people with disabilities allows
companies to charge thousands of
dollars for systems like ours. Our
system costs only $600, which
offers a comparatively cheap and
effective alternative for individuals
who sign.
Business/Cost Analysis
Fall 2018
Frame capture from Leap Motion Controller
visualizer software. This is how the Leap
“sees” the user’s hands.
In memory of Paul Strohman
Neural networks are arrays of nodes separated into layers:
an input layer, a hidden layer and an output layer. Through
linear algebra techniques, connections are made through the
hidden layer to make a decision at the output

Team Members: Brandon Palfalvi, Mary Calacal
Project Advisor: Dr. Veysel Demir
NIU CEET Antenna Measurement Setup
NIU CEET has an antenna
measurement setup within an
anechoic chamber for educational and
research purposes. This setup is
complex, outdated and is suspected to
be defective.
This project aims to build a new
antenna measurement setup It shall be
user friendly and cost effective.
Problem Statement
• Design the Transmission Module
• Design the Receiving Module
• Design the Antenna Rotator
• Design the Graphical User
Interface
• Write the Automation Software
• Testing and Validation
Design Tasks
An automated antenna
measurement setup is built. The
system is easy to understand and use.
The setup is also able to send the
radiation patterns to the user’s email
address for collection of
measurements.
Final Design/Deliverables
This is a much less expensive
method of antenna measurement
compared to traditional methods. It
can easily be adopted by other
universities for their own purposes.
The total cost of the project is under
$2000.
Business/Cost Analysis
Fall 2018
Fig. 1. The GUI used for the antenna measurement setup.
Fig. 2. An example of a radiation pattern generated by the measurement setup.

Mechanical
Engineering

Team Members: Michael Zawadzki, Daniel Trygstad, Malachi Fischer-Porter
Project Advisor: Dr. Donald Peterson
Arcjet Electrothermal Rocket Thruster
Satellites have limited mission durations,
largely due to finite fuel. Fuel is critical to
maneuver and maintain correct orbit. Current
satellites often use chemical fuels, which are
inefficient. Arcjet engines use an electric arc to
heat propellant, which is more efficient than
other engine types but can be prohibitively
expensive.
The Arcjet team seeks to make an inexpensive
Arcjet thruster that is accessible to
manufacturers of low-cost microsatellites.
Problem Statement • Should yield at least 5% improvement
in specific impulse (fuel efficiency)
• Design of power management system
should be simple and reliable
• Cost of engine fabrication should not
exceed $1,000, with total prototype
system cost not exceeding $2000
• Engine should generate thrust in excess
of 100 mN, with an input of under
2KW of power
Design Tasks
An engine composed of AS-TJ isostatic
graphite, tungsten, PTFE (Teflon), stainless
steel, and MACOR ceramic was designed,
built, and tested. A TIG welder and automotive
ignition coil were modified to power the demo
engine. Test was run with argon propellant,
which yielded a specific impulse of 360
seconds. A specific impulse of 850 seconds is
possible if the Argon is replaced with
hydrogen, which yields a 283% improvement
over typical NTO/MMH chemical thruster
efficiency of 300 s.
Final Design/Deliverables
This product targets the low-cost satellite
market. At a price of under $1,000 per unit,
it would allow small companies and
universities to use a more efficient engine
type. Significant improvements in mission
longevity and capability make this engine
very attractive relative to existing options.
This engine is sold at a 40% margin and
expected annual volume of 1500 units.
Business/Cost Analysis
Fall 2018
CFD analysis (top) and physical test of engine (bottom) Production cost per unit (top) and diagram of engine layout (bottom)
Cold gas Chemical Arcjet
(Typical)
Arcjet
(Ours)
Ion engine
Engine $10,000 $30,000 $40,000 $1,000 $60,000
Launch
Cost fraction
$30,000 $25,000 $15,000 $15,000 $10,000
Total $45,000 $55,000 $55,000 $16,000 $75,000
Approximate Cubesat propulsion system cost (per engine, typical impulse and size)
Team Members: Giovanni Pacheco, Giovanni Garcia, Dominique Greeno,
Fabian Gutierrez, Ryan Paggao
Project Advisor: Dr. Sahar Vahabzadeh
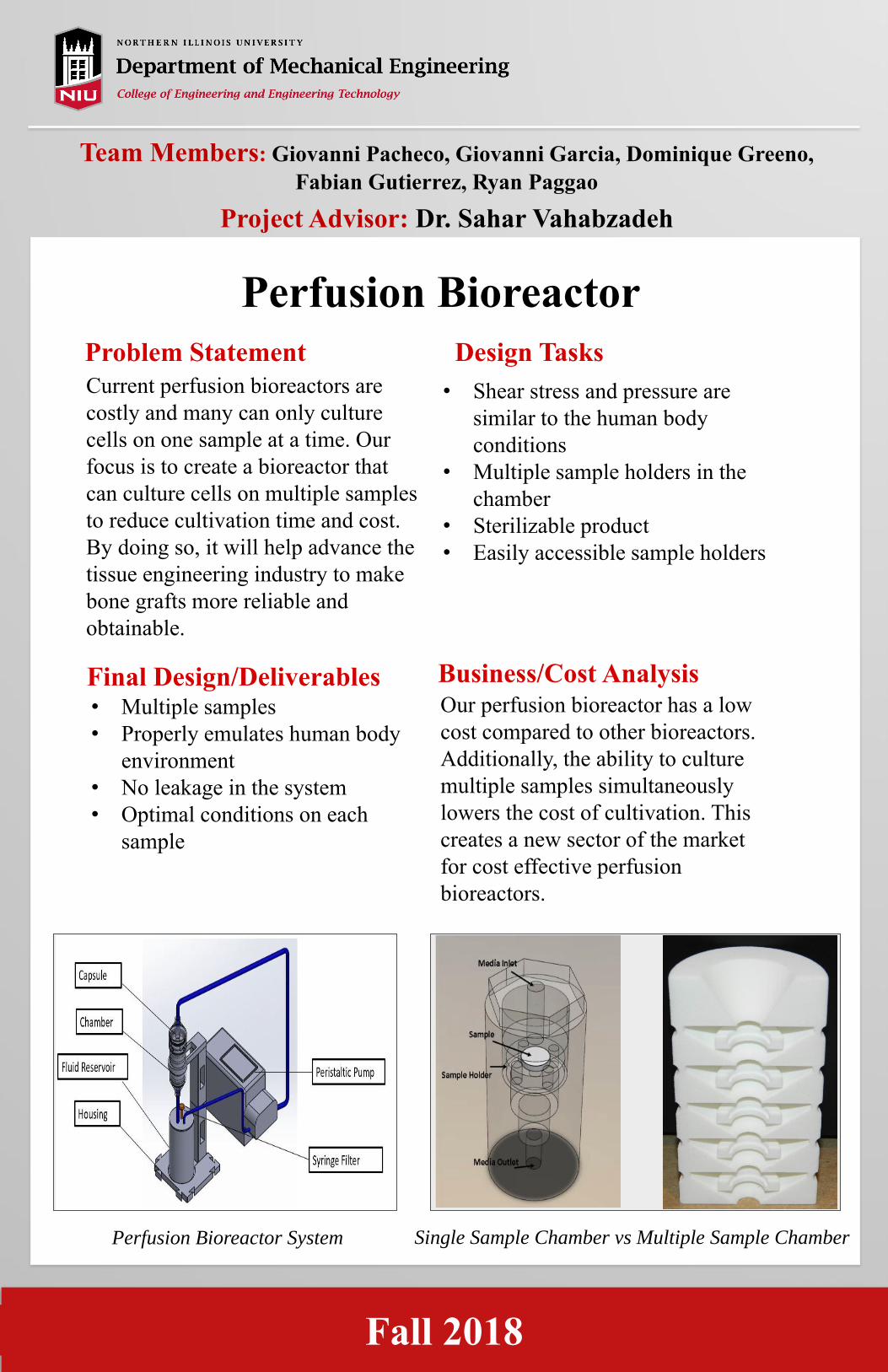
Perfusion Bioreactor
Current perfusion bioreactors are
costly and many can only culture
cells on one sample at a time. Our
focus is to create a bioreactor that
can culture cells on multiple samples
to reduce cultivation time and cost.
By doing so, it will help advance the
tissue engineering industry to make
bone grafts more reliable and
obtainable.
Problem Statement
• Shear stress and pressure are
similar to the human body
conditions
• Multiple sample holders in the
chamber
• Sterilizable product
• Easily accessible sample holders
Design Tasks
• Multiple samples
• Properly emulates human body
environment
• No leakage in the system
• Optimal conditions on each
sample
Final Design/Deliverables Our perfusion bioreactor has a low
cost compared to other bioreactors.
Additionally, the ability to culture
multiple samples simultaneously
lowers the cost of cultivation. This
creates a new sector of the market
for cost effective perfusion
bioreactors.
Business/Cost Analysis
Fall 2018
Perfusion Bioreactor System Single Sample Chamber vs Multiple Sample Chamber

Team Members: Anna Green, Joseph Sarna, Nicholas Napolitano,
Robert Steiner
Project Advisor: Dr. Sachit Butail
VR Haptics Glove
VR, Virtual Reality, is a rapidly
growing market. It currently only
employs the senses of sight & sound,
and the few technologies that
incorporate haptic feedback are
considered clunky and expensive to
develop with little knowledge if the
technology actually adds immersion
or benefit to the user.
Problem Statement
-Develop a glove that can interact in
a virtual world and offer the user a
physical feedback
-Create a lightweight configuration
for the electrical components
-Develop code to bridge VR
software with arduino
-Incorporate safety features
Design Tasks
-Glove created in order to keep all
components compact and lightweight
-Arm band designed to house larger
electronic components
-User study creates a metric of the
glove’s benefits
Final Design/Deliverables As a new market, the user study will
help determine if the haptic
feedback is worth the cost and effort
to continue further development.
This will give insight of the viability
of entrepreneurship for affordable
VR haptic gear aimed at a consumer
level market.
Business Opportunity Analysis
Fall 2018
Figure 1: Haptic glove and components Figure 2: VR user test environment

Team Members: Adam McNally, Daniel Freigo
Project Advisor: Dr. Federico Sciammarella
Custom Brake Cooling System
• Car overheating brakes past
600°F during heavy track use,
resulting in a near complete loss
of braking ability and reduced
brake component life
• No system available for specific
older model chassis from
automotive aftermarket
Problem Statement • Must allow for full steering and
suspension articulation
• Weigh under 10 pounds
• Must be able to leave system
attached for street use
• Longevity/Durability for life of
vehicle
Design Tasks
Design and create a tubing system
that collects and routes air from the
front of the vehicle to the front brake
rotors. The system lowered braking
temperatures an average of 165°F
while only adding 3 lbs to each side
of the vehicle.
Final Design/Deliverables
With the estimated volume of
systems sold a year being fairly low,
the feasibility of producing the
systems only makes financial sense
if a shop that already exists takes on
the production.
Business/Cost Analysis
Image #1
(Please also send the highest
resolution version of your pictures
separately with poster)
Image #2
include labels and explanations of
what we are seeing
Fall 2018
Figure 1: Cooling System installed onto vehicle suspension assembly
Figure 2: IR camera image of heated brake rotor while testing system
Start upMachine
Shop
Tooling $5900 $400
Labor$20 per
system
$20 per
system
Materials $120 $100
Payback (100
systems a year
@ $200 each)
359
Days19 Days

Caterpillar: Confidential Green
Team Members: Justin Clausen, Dakota Krokoz, Solomon Sawlaw, Nick Weaver
Project Advisor: Dr. Iman Salehinia
836K Landfill Compactor Cleaner finger
Optimization
• Landfill compactor cleaner fingers are
critical to maintain traction and
productivity in a landfill application.
• Cleaner fingers act as mechanical fuse
to protect powertrain components.
• Current cleaner fingers are retained
with 3 M24 bolts.
• Cost to replace 836K cleaner finger is
$215 in material and 8 hours labor.
Problem Statement • Design of shear pin to allow cleaner
finger to fuse at 20% of maximum
wheel force.
• Design of supporting structure to
withstand required loading
• Reduce replacement time of fused
cleaner finger by 7 hours
• Retain cleaner finger on machine
until reinstallation can be completed.
Design Tasks
• Completed CAD design
• Complete FEA analysis to predict
component stresses and life
• Shear pin lab testing to validate
theoretical calculations
• 100 hour field trial to validate shear
pin performance and replacement
time
Final Design/Deliverables Total savings based on a failure of a
single cleaner finger per week on a
typical 836K application. Each 836K
has 32 cleaner fingers per machine.
Business/Cost Analysis
Baseline design Improved shear pin design Non linear ANSYS simulation of shear pin fracture
Fall 2018
Baseline New Design Annual Savings
Material $215 Material $10 $10,660
Labor $960 Labor $120 $43,680
Total $1,175 Total $135 $54,340

Team Members: Flavio Jonuzaj, Harsh Patel, Matt Lueck, Brandon McTaggart
Project Advisor: Dr. Robert Sinko
Simulating Bio-Inspired Composite Materials
The Bio-Inspired Composite Materials project is
about investigating a material design mimicking a
naturally occurring internal structure, one that can
improve material properties through purposeful
design rather than material composition. The
primary experiment of the project is to compare
how laminates internally rotated to 0º, 90º, and 45º
compare in terms of stress, strain and elasticity,
terms which would be calculated from a tensile
stress experiment.
Problem Statement
• Create a purposeful internal structure based
off of a molecular structure design found in
mantis shrimp.
• Examine the changes in tensile properties
created by changing the internal structure.
Design Tasks
The results of tensile testing and FE simulation
showed a decrease in tensile strength as the
rotation of the layers increased even though there
was no change to the total infill or the material.
This has implications for tailoring tensile
properties of products to have things like safety
breakpoints. Further study of rotations and
comparison with infill changes could bring
additional design options to manufacturers.
Final Design/Deliverables
This project shows that altering the internal
geometry, an option that is unique to additive
manufacturing, has the ability to change the
mechanical properties even without changing
materials, something that allows for cost and
time saving during production. While only one
small set of examples were examined here,
further research into these types of purposeful,
bio-mimicking designs could yield significant
advances in manufacturing capabilities.
Business/Cost Analysis
Image #1
(Please also send the highest
resolution version of your pictures
separately with poster)
Fall 2018
Fig 1: The 3 designs of dog bones with the
layer orientation.
Fig 2: FE model of maximum deformation to
the 45 degree sample.

Team Members: Khalid Almehmadi, Hamad Alghayadh, Nathan Zellak,
Mustafa Altermathy
Project Advisor: Dr. Kyu Taek Cho
Oxygen Assistance Device for Scuba
(O.A.D.S.)
Scuba divers have limited time and
freedom of movement while underwater,
occasionally suffering fatal injuries due
to Oxygen deprivation. The designed
Oxygen Assistance Device for Scuba
extracts oxygen from water using the
concept of electrolysis, supplying it to
the Scuba diver in critical situations to
avoid injuries
Problem Statement
• Time studies
• Providing more time than spare tank
• Freedom of movement
• Decrease chances of fatal injuries
• Can reach the industry standard
depth for recreational diver limit
(127 ft)
Design Tasks
A diver typically consumes 137.28 grams
of oxygen per hour. By using a 12V
300A lithium ion battery, our device
produces 89.52 grams of oxygen per
hour, hence, the device generates oxygen
for roughly 40 minutes. Finally, the
device is compact and will not be a
hindrance to the movement of the scuba
diver when attached to the tank.
Final Design/Deliverables
• The battery and Nafion membrane
are the most expensive components
Business/Cost Analysis
Fall 2018
Internal view of electrolysis chamber 3D model of device
Height of
the tank
is 24
inches,
the
device is
14 inches

Team Members: Benjamin Ziegler, Ian Kidd, Ian Schabel, Mhariel Pastrana
Project Advisor: Dr. Ji-Chul Ryu
Semi-Autonomous Lake Monitor (SALM)
There are a high number of bodies of water
that are contaminated and undrinkable,
even in the US. According to USA Today,
over 10 million Americans are exposed to
contaminated water per year. This could be
prevented by monitoring and
decontamination. The team’s goal was to
create a method to continuously monitor
bodies of water in order to provide
actionable data for environmental
agencies.
Problem Statement
• Semi-autonomous for lakes,
reservoirs and rivers.
• System must be low-cost compared
to others on the market.
• System has interchangeable sensors
to meet customer's needs.
• Continuous monitoring and real-
time data collection and analysis.
Design Tasks
SALM accomplishes the following:
• Semi-autonomous
• Continuous monitoring
• Color mapping
• Real-time data collection
• Positional accuracy within 0.5 meter
• Easy-to-use graphical user interface
• Supports over 15 lbs.
• Cost: $5,000-6,000
The table shows the comparison of
SALM to existing products on the
market.
Business/Cost Analysis
Fall 2018
Product Inter-
changeable
sensors
DIY Real-time
data
collection
Est. Cost
SALM $6,000
ASV C-Cat-2 $120,000
Otter $50,000
Final Design/Deliverables
Figure 1: Initial CAD model of the SALM Figure 2: Final prototype of the SALM

Team Members: Catherine Canciamille, Jennifer Robles, David Williams
Project Advisor: Dr. Sachit Butail
Freedom Project
Individuals with Cerebral Palsy are often
wheelchair bound and sometimes have
very limited mobility. These individuals
still want to do things that they enjoy
such as photography and reading despite
their condition. A self leveling table,
phone holder, and storage container that
attaches to the wheelchair will allow
these individuals more freedom to do the
things they enjoy. Current wheelchair
attachments are expensive and the
designs do not consider individuals’
special needs.
Problem Statement
The wheelchair attachments must be
easy to use with only one hand without
putting any muscle strain on the client.
These attachments also must not cause
the client’s wheelchair width to exceed
32 inches so that it can fit through a
standard door frame.
Design Tasks
• Self leveling table that allows the
individuals to lean there chairs
forward and backward without stuff
falling off the table
• Phone holder that can comfortably be
used with one hand for photography
• Easily accessible storage container
that fits a tablet and wallet
Final Design/Deliverables
Phone holders designed for electric
wheelchairs cost around $200 where our
design cost was around $50. Non
leveling table attachments cost around
$500 while the overall cost of the self
leveling table came out to $200. All of
these attachments allow the client
freedom and the ability to do tasks they
love which attachments on the market
do not allow. You can not put a price on
freedom
Business/Cost Analysis
Image #1
(Please also send the highest
resolution version of your pictures
separately with poster)
Image #2
include labels and explanations of
what we are seeing
Fall 2018
Figure 2: New Adjustable TableFigure 1: Previous Table

Team Members: Mark Alvord, Eric Garcia, John Nowobilski, Miguel
Rodriguez, Ryan Smith
Project Advisor: Dr. Ji-Chul Ryu
The S-RCV team aims to provide a remote
control vehicle that can not only inspect sewer
pipes but bring multiple tools on board for
cleaning and removing blockages. Current
remote controlled vehicles are limited to
sewer inspection only as well as carry a high
price tag. The S-RCV will provide a lower
price and more capable machine for blockage
removal and inspection.
Problem Statement The S-RCV must be capable of:
● Navigating a 12 inch diameter sewer pipe
● Maintaining traction in wet and difficult
terrain
● Clearing both solid and viscous blockages
via rodding and jetting
● Maintaining an upright position
● Relaying location and movement of motors
to the user interface
● Vertical launch and retrieval from surface
level openings
Design Tasks
The S-RCV is capable of navigating in a dry
environment simulating an obstructed sewer
pipe. The S-RCV is capable of clearing
hardened blockages and simulated root build
up in a 12 inch cardboard and plastic pipe.
The onboard electrical system allows
monitoring of all motor movement as well as
positional and rotational movement. The user
interface allow control of rodding components
and directional drive of all wheels.
Final Design/Deliverables
This prototype remote control vehicle comes
in at under $1200 for all components and test
environments. A final design of a water and
pressure safe vehicle with a stand alone
interface would be near $3000.
Business/Cost Analysis
Image #2
include labels and explanations of
what we are seeing
Fall 2018
S-RCV prototype with root saw attachment on the rodding
system allows for solid waste breakdown and cleaning.
Unique wheel design- the tapered profile gives high grip on
pipe walls and wedges vehicle under rotational forces. High
traction treads allow for navigation in messy conditions.
Vehicle Camera Jetter Rodder Price
S-RCV ✓ ✓ ✓ $3,000
LT2-F-W ✓ $20,000
SCT-32-
W
✓ $12,000

Team Members: David Kaliniec, Erick Gonzalez, Collin Seidelman
Project Advisor: Dr. Sahar Vahabzadeh, Dr. Ji-Chul Ryu
Humidifier Incubator Shaker
For biological and tissue engineers, in
vitro experiments require the control of
the environment. Most affordable
incubators on the market do not have the
ability to control the humidity inside the
closed environment. The humidity is
important to our client for cement
environment control applications. This
Humidifier Incubator Shaker offers an
affordable all in one system alternative to
this problem.
Problem Statement
• User ability to control shaker speed
up to 200 RPM
• User ability to control temperature
up to 80 °C
• User ability to control humidity
from ambient to 100% relative
humidity
• Display live feedback from sensors
within unit
Design Tasks
Humidifier Incubator Shaker’s features
include:
• User interface with large display
• Arduino controlled components
including motor, ultrasonic
humidifier, and heating element
• Temperature, platform speed, and
humidity control
Final Design/Deliverables The R&D, electronic components, raw
housing material, and fabrication cost of
the unit is $1,395. When the assembly
process is optimized, the unit can be
mass produced for approximately $600
each unit. Similar units with similar
features cost around $16,000, such as
the NEW BRUNSWICH INNOVA 44R.
Our unit offers control of all features
desired.
Business/Cost Analysis
Fall 2018
Figure 1: Image of unit built with aluminum exterior, stainless steel interior, and electrical bottom housing.
Figure 2: Table of Controllable parameters. As shown, our unit offers control of all desired parameters at a fraction of the cost of the INNOVA 44R.
Controllable Parameters
Shaker Temperature Humidity Cost
Our Unit $1,995.00
Innova 44R $16,000.00
Shake N Bake $5,000.00
SteadySHAKE $4,800.00

Team Members: Benjamin Starcevich, Mark Lafrentz, Benjamin Bentley,
Daniel Nevarez
Project Advisor: Dr. Ji-Chul Ryu
Shadow Track
Currently, spotlights are manually
controlled by light operators in
uncomfortable and often unsafe
conditions. The mission of the Shadow
Track autonomous light system is to
provide a reliable, safe, accurate, and
low-cost way to follow a presenter.
Problem Statement
The design should consist of the following:
• Fully automated
• Fast response rate
• Smooth transitions
• Cost competitive
Design Tasks
An infrared (IR) sensor is used to locate
an IR light source worn by the
presenter. Using a proportional
derivative control, the system
successfully directs the spotlight to the
target position. The response rate of the
autonomous system is 1.02 seconds
faster than human control. The system
can also be implemented for existing
lighting systems.
Final Design/Deliverables Theatres and concerts alone are multi-
billion-dollar industries. Chicago itself
has over 500 dance and performance
theater companies. Equipment and
installation for individual autonomous
lights can cost upwards of $50,000.
We project our system will provide a
fully autonomous upgrade for $500.
This projection is based on
calculations for the industry’s most
commonly used lights.
Business/Cost Analysis
Fall 2018
Figure 2: Concept Prototype
Figure 1: Spotlight Operator

Team Members: Arsensio Aguilera, Anthony Greco, Tim Jackimek, John
Oberlander, Sam Schmalz
Project Advisor: Dr. Federico Sciammarella
Hybrid Collector
Typical Solar Air Heaters can only run
on the sun’s energy during the day.
This leads to the problem of providing
heat during times of little to no sun. To
resolve this issue, heating elements
have been installed and arranged to
allow continuous heating of air during
all hours of the day, while being
powered by a solar panel. This leaves
the end user with a sustainable way to
capture heat while using less energy
over time.
Problem Statement
Business/Cost Analysis
• Manufacture a solar collector that
harvests solar thermal & light
energy
• Eliminate fossil fuel usage & the
necessity for external heating
devices
• Limit expensive & intrusive
installation
• Achieve an average temperature of
(55º F) for 24 hours in conditioned
area
Design Task
The Hybrid Collector meets all
objectives. The addition of heating
elements separates the Hybrid
Collector from the competition.
The additional heat generated by
the Hybrid Collector can save the
end user over $2,000 per year.
Final Design/Deliverables
Fall 2018
Performance
Metric
Typical
Collector
Hybrid
Collector
Cost ~ $800-$1000 ~ $400
Operating
efficiency
~ 8 Hours ~ 24 Hours
Energy Savings
annually
~55% ~65%
Auxillary Heat
Generation
0 W ~ 60-80 W
Outside air
coming in
Heated air
entering space
Figure 1: Hybrid Collector installation
Figure 2: Hybrid Collector design

Team Members: Ryan Bielman, Jeffrey Good, Michael Koeplin, Kyle Sullan
Project Advisor: Dr. Federico Sciammarella
Mobile Dynamometer For STEM Outreach
Within the FIRST Robotics Competition
community (FRC), a common method for
evaluating custom driving-type robot
designs is to simply test drive them. Test
driving leaves a lot to be desired because it
does not quantify parameters such as power
and efficiency. Many different test stations
used across a wide variety of industries
exist to measure this but none are both
mobile and tailored to these robots.
Problem Statement
o Spec torque transducer, hysteresis
brake, couplers, shafts, bearings, etc.
o Package system onto custom cart
o Chassis mounting method for a wheel-
to-drum interface
o Central weldment structure
o Allow for bench-top testing using
battery and motor controllers
o Linearize thermocouple signals and
use an Arduino to output to a HMI
Design Tasks
The Mobile Dynamometer is used to
provide data that aids in designing robot
drivetrains. It measures the torque, power,
speed, efficiency, and temperature of the
robots under dynamic loading conditions.
The station is a self-contained unit so it can
be a transportable learning tool for the FRC
community.
Final Design
Genesis Automation sponsors a team in the
FIRST Robotics Community, so the goal
of this project was to aid them in their
mission to help students get involved in
STEM. Thus, in order to help the
community of 3,140 teams and 91,000
high school participants, this project was
made open source.
Market Analysis
Fall 2018
Above is the Mobile Dynamometer Station. An impact driver can be used to quickly raise the feet. A laptop is used tooperate the Magtrol equipment and the electrical cabinet in the back which contains: roboRIO, motor controllers, PSU,bus bar, Phoenix contact terminals, PDPs, K-type thermocouples, Dataforth linearizers, Arduinos (with multiplexers).
Robot Mount
Roller Drum
Weldment
80/20 Extrusion
Magtrol Equipment
Leveling Feet (4)
Magtrol Hysteresis
Brake
Shaft coupling (2)
Rotary Torque
Transducer
Bearings (2)
Blower Unit

Team Members: Amro Shanshal, Oscar Barba, Patrick Maglaya, Josh Marble
Project Advisor: Dr. Brianno Coller
Project Icarus
Grid failure resulting from natural
disasters, such as Puerto Rico’s 2017
major blackout, can obstruct first
responders’ ability to evaluate the disaster
site and allocate resources effectively.
Rapid deployment of aerial surveillance
and local communication restoration for
extended flight times is integral to on-site
assessment and effective aid deployment.
Problem Statement • System shows less than 5 minute
autonomous take off, altitude
management, landing capabilities
and more than 2 hours of flight time
• Adjustable camera gimbal to live
stream on-site video
• Ability to operate in acclimate
weather conditions
Design Tasks
• Communications restoration during
grid failure
• Improve effectiveness of aid and
relief logistics
• Improved situational awareness for
first responders
• Modular aerial platform for
additional firefighter and law
enforcement devices
Final Design/Deliverables Current market solutions include high
budget military and special operation
applications. Icarus provides an
affordable solution for first responders,
as well as agricultural and construction
site support.
Business/Cost Analysis
Fall 2018
Icarus Surveillance System
Benefit Total
No FAA Drone Training
Requirement
$3,000
Alternative to Manned Helicopter
Survey
$400
No Drone Pilot Requirement $38
No Additional Cameras
Monitoring
$300
Sum of Benefits $3,738
Cost Total
Purchased Parts $1037.67
Manufactured Parts $112.78
Labor $450
Sum of Costs $1,600.45
Cost Benefit Ratio Retail
Cost
2.3 $3500

Industrial and Systems
Engineering

Team Members: Abdullah Alhajji, Sonja Marquette
Project Advisor: Dr. Damodaran, Dr. Nguyen
Redesigning the Stone Assembly Line
The Stone High Volume Assembly
Line was originally designed in 2013
to run with seven operators and have
a throughput of 160 units per day.
However, the demand for the product
has fallen, leading to a greater
variety of products with higher
complexity being run on the line
with fewer operators.
Problem Statement
In order to successfully design a
new layout, the following had to be
done:• Analyze product mix on the line
• Calculate the daily demand requirements
• Time studies on total cycle time and
individual work elements
• Determine ideal number of operators
• Balance the work load between operators
• Create new work instructions
Design Tasks
The final design for the new layout
includes a straight assembly line with
a station for offline work. This new
layout will meet the updated demand
requirement of 120 units per day
while only requiring four operators
to work an eight hour shift.
Final Design/Deliverables
The cost of the new layout was
minimal by reusing the work
benches already in place.
Furthermore, there are additional
cost savings from reduced labor and
overtime costs. Finally, the line has
better ergonomics, which can reduce
costs due to injury.
Business/Cost Analysis
Fall 2018
In the new layout, operators will be able to easily move between
stations.In the current layout, work is not balanced
between the stations, leading to a buildup of WIP.

Team Members: Gilbert Bwetabure, Joshua Moore, and Parth Thakkar
Project Advisor: Dr. Damodaran , & Dr. Nguyen
Title of Project Zeeland Value Stream
Cell : 963 Architecture
In the next three years, Woodward
is expected to have 47% increase in
manufacturing valve sets demanded
by Zeeland. The current 963 cell
layout is restricted to certain
number of operations. Some
operations gets outsourced to other
departments causing 3-5 days delay
in material flow. The current state
of the cell meets demand, but will
fail to meet forecasted demand of
value sets in the future.
Problem Statement Design Tasks
After compiling an future state map,
the production lead time for the
centerless and flow family were
reduced by 388% and 194%
respectively.
Final Design/Deliverables
With a proposed ideal future state
map, total costs of adding new
machines to the cell are just under
$2 million. A stakeholder’s analysis
comparing reward and effort will
allow management to decide on the
most necessary costs.
Business/Cost Analysis
Image #2
include labels and explanations of
what we are seeing
Fall 2018
• Analyzed the material flow of Zeeland
parts through cycle times, process flow
charts, spaghetti diagrams, and value
stream mapping.
• To reduce delays, machines such as
lasemark, heat treat, passivate, and
centerless grind should be moved into
Cell 963.
• Update or expand the layout of Cell
963 to accommodate the machines
moved to the cell. As a result it will
minimize the material flow and meet
the forecasted demand.
Before the ideal future state map, delays were a serious
problem to the material flow. Some parts took more than 10
days to complete.
After moving multiple operations within the cell, the delays
were dramatically decreased. No part takes more than 2 days
to make.

Technology

Team Members: Jason Kors, Christian Morales, Kamil Polniak
Project Advisor: Dr. Martin and Dr. Mills
Development of a Low Cost Hand-held
Spectrometer
We believe that due to relevant
problems in current lighting such as
health, safety and productivity; we
need to design a tool with which one
can further analyze and understand
their environmental lighting in an
effort to more adequately reduce the
problems associated with it.
Problem Statement
• Analyze three spectral sensors
• Integrate with a microcontroller
or microcomputer
• Based on operational
characteristics develop a final
meter design
• Possible integration into
previously developed wearable
sensor array
Design Tasks
For our final design, we present a
working spectrometer prototype.
From our research and findings, the
spectrometer functions as most
others on the market providing
similar data as would be gathered
from other spectrometers. We also
are including proper manuals and
documentation for our design.
Final Design/Deliverables
For our design, our goal was to
maintain a final assembly price of
$500. When not including amortized
pre-production design work, we
have come very close to that goal.
Every reproduced unit can now be
assembled for approximately $500,
compared to other marketed units
ranging from $1500 - $5000.
Business/Cost Analysis
Fall 2018
Typical Spectral Power Distribution (SPD) for Common Types of Lighting
Final 3D CAD assembly of our hand-held spectrometer.

Team Members: Annalyssa Bell, John Mayer, Erik Osterby
Project Advisor: Dr. Andrew Otieno
Weber Grill
Focusing on the Go-Anywhere Weber
Grill, there are various projects that go
into creating a grill such as Bill of
Materials, Assembly Line, Shipping and
Handling, and the Re-Designing to
satisfy customer complaints. The main
customer complaint was the heat that the
grill was giving off and temperature
control. The grill warps the ground when
grilling.
Place Company Logo Here
(if applicable)
Problem Statement
At the beginning of the year, the
team created Bill of Materials for
the Grill along with a packaging
assembly line. For the last semester,
we focused on the main customer
complaint, temperature control. The
Team redesigned the legs to be
adjustable and the heat dampers to
have a consistent control of heat.
Design Tasks
The final design of the grill includes
legs that can be adjusted by height
and also can sit level on an unlevel
surface. The Adjustable legs
decreased the temperature of the
ground underneath the Go-Anywhere
Grill. For the heat dampers, the
group added a simple punch design
to get the same temperature for every
use.
Final Design/Deliverables
The team wanted Weber to spend the least
amount of money as possible for a redesigned
premium model. The deliverables where
designed to limit processes and reduce
overall costs while upselling the Go-
Anywhere Grill Premium Model. The heat
dampers adds no extra step to the stamping
process and the legs go through the same
bending process. The only cost we are adding
would be the leg adjusting blocks. The
estimated cost of the leg blocks is $9.54 per
unit.
Business/Cost Analysis
Fall 2018
The legs are configured for a more
sturdy base. They flip up and lock
the lid in place for easy portability.
Heat dampers are cut for easy and
accurate adjustability (not shown)
Added Weber Grill certified
thermometer to easy
temperature reading

Team Members: Farhan Alghamdi, Arturo Avila, Isaias Cervantes,
Stephen Slager
Project Advisor: Dr. Hogan
Electronic Assisted Knee Walker
The purpose of the electronic
assisted knee walker we are building
is to improve the overall safety.
Many knee walkers currently on the
market have flaws including:
● Lack of assistance going uphill.
● Tipping over.
● Sudden stops due to obstacles
in wheels’ path.
Problem Statement ● Design and build a durable
prototype.
● Test the strength of the design
using a finite element analysis.
● Calculate the force and torque
required to move the knee
walker uphill.
● Motor size was selected using
power and work formulas.
● Write a program for ultrasonic
detector that will work along
with a visual alarm which
activates when an object is
detected in the front of the knee
walkers path.
● Calculate tipping angle when
knee walker is performing turns
and in the straight position.
Design Tasks
● The final design of knee walker
is a 3 wheel design for increased
stability, two wheels in the front
and one in the rear.
● Our base is designed to contain
all electronic features such as
the motor, batteries, and other
power supplies.
● 24V, Electric DC Motor will
give assistance going uphill.
● Two batteries 12V, 12AH are
used to power the motor and
other electronics.
● Ultrasonic detectors on the front
wheels will be held by splash
guards to alert the user of the
hazards in the front of knee
walker.
● Tilt sensors will inform the user
of possible tipping risk..
Final Design/Deliverables
● The total cost of the project is
$800 that included the materials
of the knee walker and
electronic and motor parts.
Business/Cost Analysis
Fall 2018
3D SolidWorks Model Motor and connections Schematic

Team Members: Timothy Fisher, Michael O’Malley, Erich Wenzel
Project Advisor: Dr. Kilaparti
Automated Water Spray Booth
As the world continues to become more revolved around
electronics, water protection for these products is essential.
This is not only exclusive to electronic products, but because
electronics are being integrated into everything, the new
standard for these products is waterproofness. Ingress
Protection testing, or IP testing is what companies use to test
the waterproofness of a product. In industry, these testing
methods are manual and time consuming. If these testing
methods are not automated it will cost companies large
amounts of money and time. With our prototype, we set out to
take the first step in automating IP testing. Our prototype is a
foundation that companies can build from as it suits their
needs.
Problem Statement
Make the test more accurate by
eliminating human error and
increasing consistency
Minimize set-up/clean up time
Make structure adaptable for the
unique needs of clients
Increase user productivity
Use an actuator to adjust the height of
the product
Design Tasks
The final design consists of a
moveable frame to hold the nozzle
and control system. The control
system will control the spray
duration and display flow rate for the
selected duration.
Final Design/Deliverables
To implement our design it would
cost $1411.50 with professionally
produced components. This product
would reduce the time per test and
will allow NTS to perform 5.7%
more tests increasing their profits by
over $5000 per year. The ROI on
our product is just over 3 months.
Business/Cost Analysis
Image #1
(Please also send the highest
resolution version of your pictures
separately with poster)
Image #2
include labels and explanations of
what we are seeing
Fall 2018
The assembled frame and table within the testing booth at NTS
Hose Holder
Rigid Moveable
Frame
Microcomputer
mount and desktop
Locking Non-
Slip Casters
Nozzle(s)
Programable
Table
Close up view of various components that make up the testing station

Interdisciplinary (Mechanical
and Electrical Engineering)

Team Members: Hnin Lin, Jazael Medina, Matthew Martone, Michael Bockwoldt, Michael
Duda, Nathan Luptak, Mary Carter, Mark Pacyga, Fahad Mohammedhussein, Bill Dedic
Project Advisor: Dr. Donald Peterson
Motor Assisted Walker (MAW)
Individuals who are unable to walk
properly need rehabilitation devices
to prevent future health
complications. This motorized
walker aims to assist users in
developing healthy gait cycles while
strengthening hip and leg muscles.
Problem Statement
Design a walker with the ability to
provide walking support, lift the
individual from sitting to standing
position, and promote muscle
rehabilitation. In addition to being
motorized and manually controlled,
design to have the ability to prevent
unintentional collision.
Design Tasks
The final design of the
MAW supports the user by their
arms. The MAW contains a lifting
mechanism that allows the user to
both sit down and stand up while
being supported. The MAW also uses
joystick operated wheel motors to
assist the user when walking while
also using ultrasonic sensors to stop
the device from colliding with other
objects if the user gets too close. The
MAW has a walking area large
enough for the user to develop a
healthy walking cycle and can fit
through ADA approved door ways.
Final Design/Deliverables
This walker is the only gait trainer
on the market that is electrically
assisted by motors. Most gait
trainers currently on the market are
unmotorized and cost upwards of
$2000. To remain competitive, our
target budget for the walker was
$1000, and our final design cost
was $1005.
Business/Cost Analysis
Fall 2018
This picture shows the final design of the MAW in the
lowered position

Team Members: Syed Sabeel Hasan, Eric Walchli
Jeremiah Rodriguez, Lauren Anderson
Project Advisor: Mr. Eric Karlen, Dr. Donald Zinger
Electromagnetic Pulse (EMP) Welding
The current torque tube assembly at
UTAS requires drilling holes,
riveting steel and aluminum
components together and applying
chemical coatings at the joining
interface. This process is time
consuming and moisture may still
enter at the interface to induce
galvanic corrosion.
Problem Statement
• Construct coil and field-shaper
assembly that does not plastically
strain during welding process.
• Optimize ohmic and induction
losses to achieve weld with
minimum energy input.
• Establish quick and easy electrical
and mechanical setup for
positioning/welding workpieces.
Design Tasks
Final Design/Deliverables Business/Cost Analysis
Fall 2018
EMP welding is 99% faster than
traditional joining methods and can
be set up in under 5 minutes. The
coil design is reusable, and no
consumables are required to achieve
a weld. This process reduces parts,
failure modes, labor costs and
production time! The total one-time
cost for producing the welder
assembly is approx. $4,230.
The optimized model shown in
Figure 1 can withstand the structural
loads and produce the magnetic
pressures required to achieve a weld.
This welding technique does not
require chemical coatings, cause
galvanic corrosion and takes less
than 6 µs to produce a weld.
Steel tubeAluminum
tube
Dielectric
disks
Copper
disks
Field shaper

















