23
Shih-Chieh Lee 1 Detection and Tracking of Region- Based Evolving Targets in Sensor Networks Chunyu Jiang, Guozhu Dong, Bin Wang Wright State University ICCCN 2005
| Date post: | 30-Dec-2015 |
| Category: |
Documents |
| Upload: | bryan-harrell |
| View: | 215 times |
| Download: | 2 times |

Shih-Chieh Lee 1
Detection and Tracking of Region-Based Evolving
Targets in Sensor Networks
Chunyu Jiang, Guozhu Dong, Bin WangWright State University
ICCCN 2005

2Shih-Chieh Lee
AgendaAgenda
IntroductionIntroduction BackgroundBackground R-tree Sensor Network TopologyR-tree Sensor Network Topology In-network DetectionIn-network Detection In-network TrackingIn-network Tracking Experimental EvaluationExperimental Evaluation ConclusionsConclusions
3Shih-Chieh Lee
IntroductionIntroduction Region-based targets/events
Contiguous spatial regions where objects of interest are present
Applications: toxic leak region, pollution area, area of forest fires, formations of tanks
Issues: detection of event shape tracking of shape evolving targets communicating spatial objects in-network processing of spatial information efficient processing of spatial queries

4Shih-Chieh Lee
IntroductionIntroduction
This work designs efficient network topologies and algorithms for detecting and tracking region-based targets and events

5Shih-Chieh Lee
BackgroundBackground
Definition: A region-based target is a spatial region where objects/phenomenon of interest exist. We will assume that regions can be described by polygons. Each region is represented by a chain-of-vertices (COV) description, which consists of the vertices of the underlying polygon of the region listed in clockwise manner.

6Shih-Chieh Lee
Chain-of-Vertices (COV) = 41-27-31-39-47-51-(41)
BackgroundBackground

7Shih-Chieh Lee
R-tree Sensor Network TopologyR-tree Sensor Network Topology
A 2-D space2 sensor field is divided into grids: grid is a basic spatial unit of a square shape at least one sensor exists in each grid Using R-tree structure to organize sensor nodes
into a distributed hierarchical topology. R-tree
(1) effectively represent spatial information (2) obtain fast response time and accuracy for
query execution (3) achieve minimal energy consumption for shape
evolving target detection and tracking

8Shih-Chieh Lee
R-tree Sensor Network TopologyR-tree Sensor Network Topology
A 2-D space2 sensor field is divided into grids: grid is a basic spatial unit of a square shape at least one sensor exists in each grid Using R-tree structure to organize sensor nodes
into a distributed hierarchical topology. R-tree
(1) effectively represent spatial information (2) obtain fast response time and accuracy for
query execution (3) achieve minimal energy consumption for shape
evolving target detection and tracking

9Shih-Chieh Lee
R-tree Sensor Network TopologyR-tree Sensor Network Topology
R-tree satisfies the following properties: The root has at least two children unless it is a
leaf Every non-leaf node has at least 0.5p children
unless it is the root All leaves appear on the same level

10Shih-Chieh Lee
In-network DetectionIn-network Detection Base Algorithm: Forward-All
Algorithm each intermediate node simply passes the
information received from its children to its parent
incurs a large amount of communication/energy overhead since
Forward-Description Algorithm Boundary detection algorithm Merging algorithm: Description improvement algorithm:

11Shih-Chieh Lee
In-network DetectionIn-network Detection Boundary detection algorithm
Used for nodes at a certain level of the R-tree in a distributed manner
Determines the sensors on the boundary of the event Graham’s scan [11] for computing convex hull : O(n2) Suggest boundary detection algorithm at level 3 or
higher level
COV = 41-34-27-28-29-30-31-39-47- 46-45-44-43-51-42-(41)

12Shih-Chieh Lee
convex hull The convex hull of a set of points is the The convex hull of a set of points is the
smallest convex set that includes the smallest convex set that includes the points. For a two dimensional finite set points. For a two dimensional finite set the convex hull is a convex polygon.the convex hull is a convex polygon.

13Shih-Chieh Lee
In-network DetectionIn-network Detection Merging algorithm:
Used by a node to merge the event regions obtained from its child nodes
41-27-31-47-51-(41) 88-90-99-106-104-(88)
47-51-41-27-31-88-90-99-106-104-(47)

14Shih-Chieh Lee
In-network DetectionIn-network Detection Description improvement algorithm:
reducing the unnecessary details in COV can help reduce communication cost.
Simplification 41-34-27-28-29-30-31-39-47-51-(41)
=> 41-27-31-47-51-(41) Smoothing
When the length of an edge is much shorter than the lengths of its two neighboring edges, we can remove this edge by removing one of the two points of this edge from the COV description.

15Shih-Chieh Lee
In-network DetectionIn-network Detection Smoothing

16Shih-Chieh Lee
In-network TrackingIn-network Tracking
Concerned with determining various dynamic characteristics of the event region moving direction/speed/rate of change
(expansion or shrinking) in area center(t) , area(t)

17Shih-Chieh Lee
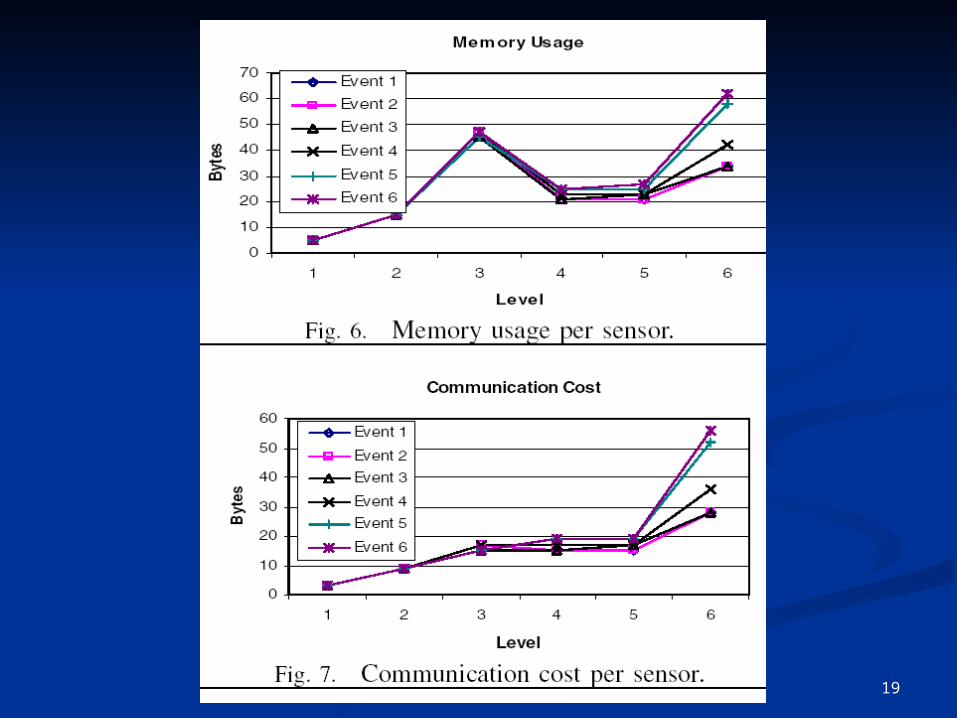
Experimental EvaluationExperimental Evaluation 32 * 32 sensor grids sensors are organized into a 6-level R-tree with
a branching factor p of 4. Event Detection cases:
Event 1: a circular shaped event of radius 4 involving 52 grids located at the center of the sensor field.
Event 2: a circular shaped event of radius 5 involving 76 grids located at the center of the sensor field
Event 3: the same size and shape as event 1, but is located on the right side of the sensor field
Event 4: a small irregular shaped event involving 63 grids.

18Shih-Chieh Lee
Experimental EvaluationExperimental Evaluation Event 5: a large irregular shaped event
involving 200 grids, and has several concave segments.
Event 6: a moon shaped event involving 79 grids, and has a concave side and a convex side.
19Shih-Chieh Lee

20Shih-Chieh Lee

21Shih-Chieh Lee

22Shih-Chieh Lee
ConclusionsConclusions
Developed in-network algorithms for the detection of spatial, regionbased event, for simplification of event descriptions to reduce communication cost, and for tracking of region-based events/targets.

23Shih-Chieh Lee
ConclusionsConclusions

















