33
Shortcourse on symmetry and crystallography Part 1: Point symmetry Michael Engel Ann Arbor, June 2011

Short-‐course on symmetry and crystallography
Part 1:
Point symmetry
Michael Engel Ann Arbor, June 2011

Euclidean move
Defini&on 1: An Euclidean move is a linear transformaBon that leaves space invariant: Here x is a vector, A an 3x3 orthogonal Matrix and b a 3-‐vector.
Ques&on: Euclidean moves form a ?-‐dimensional space.
T = {A, b}
x �→ T (x) = Ax + b

Defini&on 2: The product of two transformaBons and is: (Note: T1 is applied first!)
Product of Euclidean moves
T1 = {A1, b1}T2 = {A2, b2} T2 ◦ T1 = {A2A1, A2b1 + b2}
Observa&ons:
1. The inverse is: (Check: )
2. Every transformaBon of finite order n (i.e. T n = 1) leaves at least one point invariant.
T −1 = {A−1,−A−1b}T ◦ T −1 = T −1 ◦ T = 1
Defini&on 3: The order of a transformaBon T is the smallest integer n such that One can also say this transformaBon is n-‐fold.
T n(x) = T ◦ T ◦ T ◦ · · · ◦ T (x) = x

Group
h(p://en.wikipedia.org/wiki/Group_(mathema<cs)
Formal definiBon of symmetry group
Defini&on 4: • A symmetry of an object in space (cluster, Bling, laVce, …)
is an Euclidean move that leaves the object indisBnguishable.
• A symmetry group is a group of symmetries.
Defini&on 5: The order of a group is equal to the number of elements: |G| = |{g ∈ G}|

Normal form:
Types of symmetries
Classifica&on: 1) b = 0 or b ≠ 0? 2) Angle α. 3) Eigenvalues of A.
Basic types: IdenBty = 1,
(i) ReflecBon, (ii) RotaBon, (iii) TranslaBon
Composite types: (iv) Glide reflecBon, (v) RotoreflecBon (Inversion),
(iv) Helical symmetry
A =
±1 0 00 cos(α) − sin(α)0 sin(α) cos(α)
x �→ T (x) = Ax + b

ReflecBon/mirror symmetry (S2 = 1)
Ambigramm (segerman.org)
Kyoto, June 2008

(n-‐fold) RotaBonal symmetry (Sn = 1)
Ambigramm (segerman.org), n = 2
Flag, n = 3
Mandala, n = 6

TranslaBonal symmetry (n > 1: Sn ≠ 1)
Giant’s causeway, Northern Ireland
SEM image of the wing of a Papilio bucerfly

Composite Symmetries
TranslaBon + ReflecBon = Glide reflecBon
RotaBon + ReflecBon = RotoreflecBon (Inversion)
TranslaBon + RotaBon = Helical symmetry

Here:
• The group G is a set of Euclidean moves.
• The set X is the three-‐dimensional space.
• An Euclidean move acts on 3D space as an affine transformaBon.
Group acBon

• The orbit consists of all points that are equivalent under symmetry.
• The stabilizer consists of all symmetries that leave a point invariant.

Point symmetries
Defini&on 6: A point symmetry is a symmetry which leaves a point x0 invariant:
Observa&ons:
• TranslaBons cannot be point symmetries.
• Symmetries with finite order are point symmetries.
• Symmetries with infinite order cannot be point symmetries. (Note: Some sources consider spherical and cylindrical symmetry point symmetries.)
T (x0) = x0

Point group
Observa&on:
1. A point group is a finite subgroup of O(3), the space of three dimensional orthogonal matrices. Note:
2. If two symmetries have no common invariant point, then they generate a group of infinite order. (Exercise)
Defini&on 7: A point group is a group of point symmetries, which leave a common point x0 invariant.
Classifica&on strategy: Determine finite subgroups of SO(3). Then extend them into O(3).
O(3) = {A ∈ 3×3 : ATA = 1}
SO(3) = {A ∈ 3×3 : ATA = 1,det(A) = 1}

Comparing groups
Defini&on 8: Two subgroups H1 and H2 of a group G are conjugated, if there exists a , such that: (Exercise: Show that conjugated subgroups are isomorphic.)
g ∈ GH2 = g
−1H1g
Example: G = O(3). Two point groups are conjugated, if there is a change of basis that maps them into each other.

ClassificaBon of 2D point groups (up to conjugacy)
Normal form of an orthogonal Matrix in O(2):
A = ±�
cos(α) − sin(α)sin(α) cos(α)
�
Cyclic groups: C1, C2, C3,… where Cn consists of all rotaBons about a fixed point by mulBples of 360/n. Dihedral groups: D1, D2, D3, D4,... where Dn (of order 2n) consists of the rotaBons in Cn together with reflecBons in n axes that pass through the fixed point.

Proper point groups in 3D (subgroups of SO(3))
• Cyclic groups: Cn with order n • Dihedral groups: Dn with order 2n • Tetrahedral group T with order 12. Octahedral group O with
order 24. Icosahedral group I with order 60.

Platonic solids in 4D: Higher dimensions: Only simplex, hypercube, cross-‐polytope.
Role of dimension

Sands, page 25.
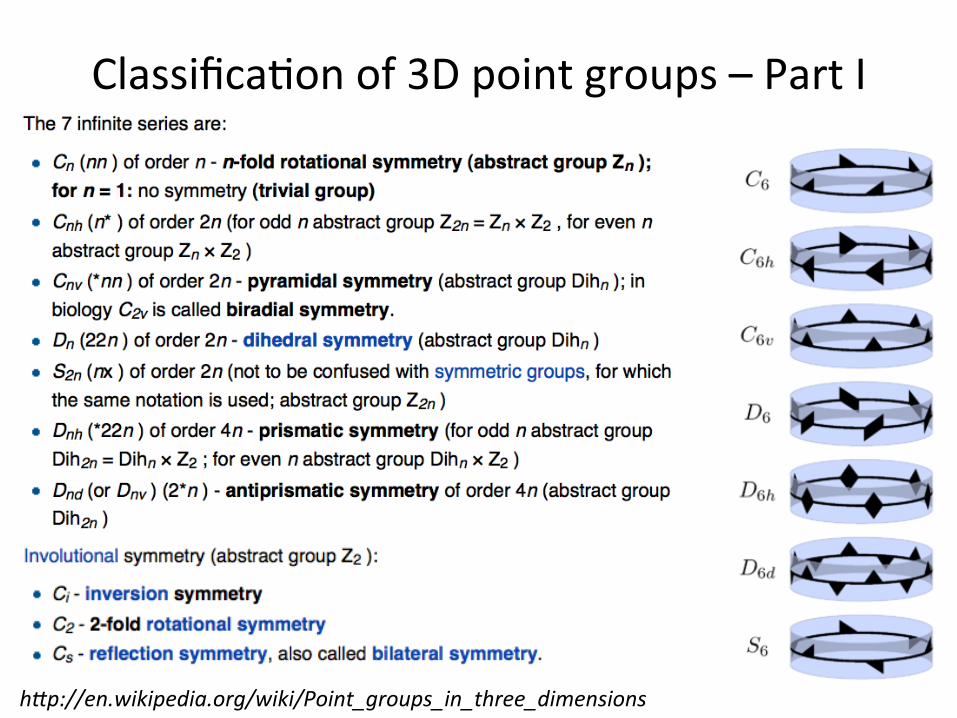
ClassificaBon of 3D point groups – Part I
h(p://en.wikipedia.org/wiki/Point_groups_in_three_dimensions

Exercise 1



Exercise 2

Exercise 3

Exercise 4
Point symmetry?

ClassificaBon of 3D point groups – Part II
The 7 remaining point groups: • T (332) of order 12 -‐ chiral tetrahedral symmetry.
RotaBon group for a regular tetrahedron. • Td (*332) of order 24 – full tetrahedral symmetry.
Full symmetry group of a regular tetrahedron. • Th (3*2) of order 24 – pyritohedral symmetry.
Symmetry of a volleyball. • O (432) of order 24 – chiral octahedral symmetry.
RotaBon group for a regular octahedron/cube. • Oh (*432) of order 48 -‐ full octahedral symmetry.
Full symmetry group of a regular octahedron/cube. • I (532) of order 60 – chiral icosahedral symmetry.
RotaBon group for a regular dodecahedron/icosahedron. • Ih (*532) of order 120 -‐ full icosahedral symmetry.
Full symmetry group of a regular dodecahedron/icosahedron.


Archimedean solids – Part 1


DeterminaBon of the point group of an object in space 1. Object linear: C∞v or D∞h. 2. High symmetry, non-‐axial: T, Th, Td, O, Oh, I, Ih. 3. No rotaBon axis: C1, Ci, Cs. 4. Determine the symmetry element with highest order
and use the following table:
Group Order
n
2n
2n
2n
4n
4n
n
orthogonal rotaBons
verBcal mirror
horizontal mirror
verBcal mirror
horizontal mirror

Example: Carolyn’s packings of small spheres on a big sphere
1. Six trimers of spheres arrange on the verBces of an octahedron into two different orientaBons.
2. What are the point groups? Ignore the numerical inaccuracy (fluctuaBons in the orientaBon).

Exam quesBons, part 1
• What is a symmetry? • How does a symmetry act on Euclidean space? • What types of symmetries are there? • What is a point symmetry and a point symmetry group? • What does it mean to classify point groups? • What points groups are there in 2D and 3D? • How can you idenBfy the point group of an object?

















