SICB10 Talia Yuki Moore 1/7/2010 Adding Inertia and Mass to Test Stability Predictions in Rapid Running Insects Talia Yuki Moore*, Sam Burden, Shai Revzen, Robert Full PolyPEDAL Lab University of California Berkeley [email protected]1
Transcript
SICB10 Talia Yuki Moore 1/7/2010
Adding Inertia and Mass to Test Stability Predictions in Rapid
Running Insects
Talia Yuki Moore*, Sam Burden, Shai Revzen, Robert Full
Increased Moment of Inertia Treatment Recovers & Does
Not Lead to Instability
Limit ManeuverabilityDecrease Speed
SICB10 Talia Yuki Moore 1/7/2010
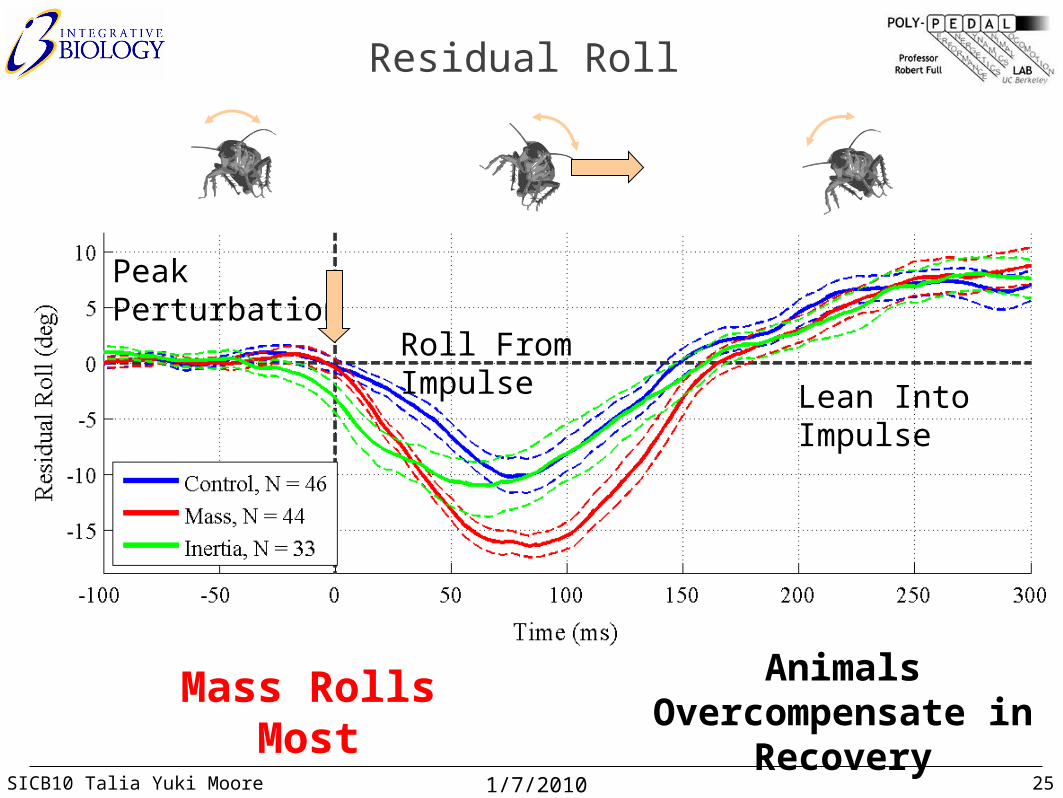
Residual Roll
25
Mass Rolls Most Animals Overcompensate in Recovery
Lean Into Impulse
Roll From Impulse
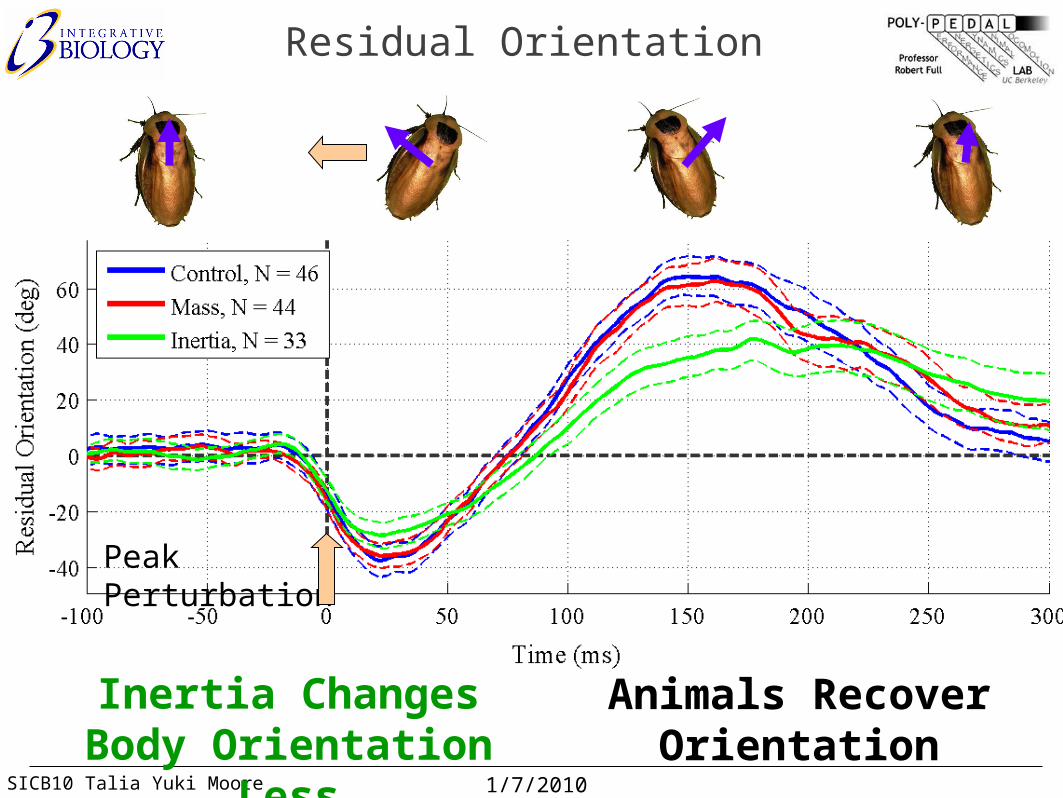
Peak Perturbation
SICB10 Talia Yuki Moore 1/7/2010
Residual Pitch
26
Mass Pitches More than Inertia
Animals Remain Pitched Down in Recovery
Nose down
Nose up
Peak Perturbation
SICB10 Talia Yuki Moore 1/7/2010
Residual Lateral Velocity
Inertia Lateral Velocity Changes Less
Animals Overcompensate & Move Into Perturbation
Peak Perturbation
SICB10 Talia Yuki Moore 1/7/2010
Residual Lateral Tarsal Position
Inertia Recovery SlowerAnimals Overcompensate & Place Feet
as if to Resist Next Perturbation
Peak Perturbation
SICB10 Talia Yuki Moore 1/7/2010
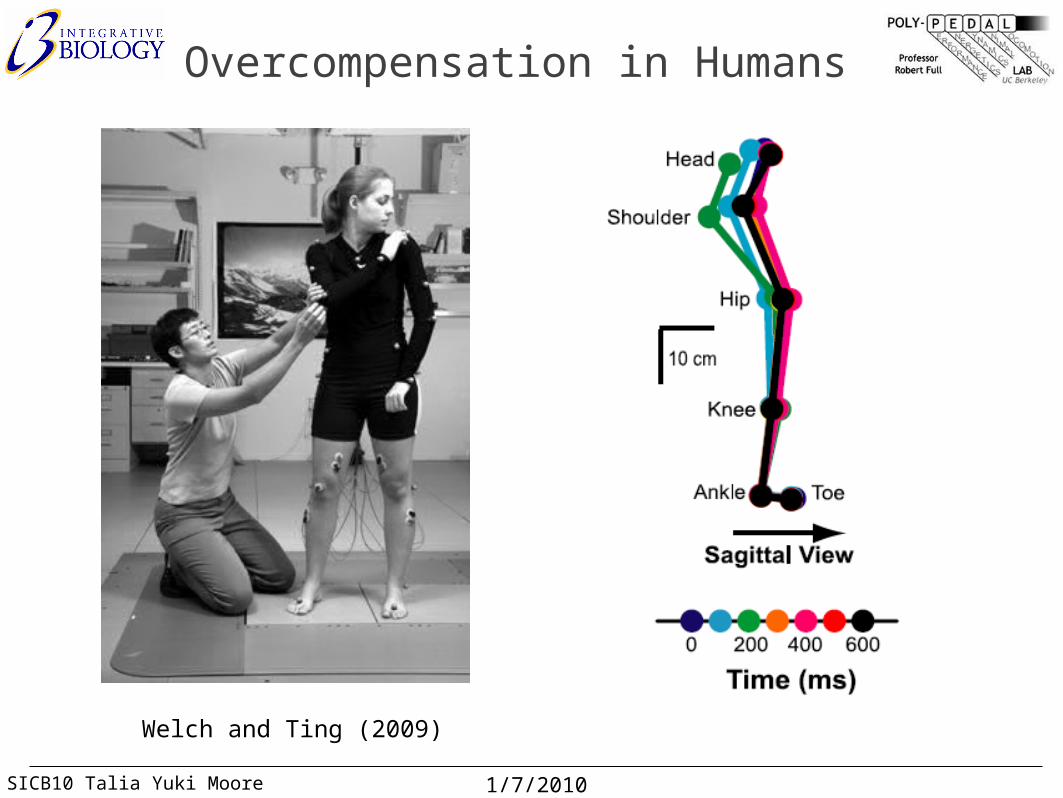
Overcompensation in Humans
Welch and Ting (2009)
SICB10 Talia Yuki Moore 1/7/2010
Feedback Response
Frequency Change
Neural FeedbackR
esid
ual P
hase
TimeTime
Tars
al F
ore-
Aft
Posi
tion
Mechanical FeedbackNo Frequency Change
Frequency Change
Revzen, Bishop-Moser, Spence, Full (2007)
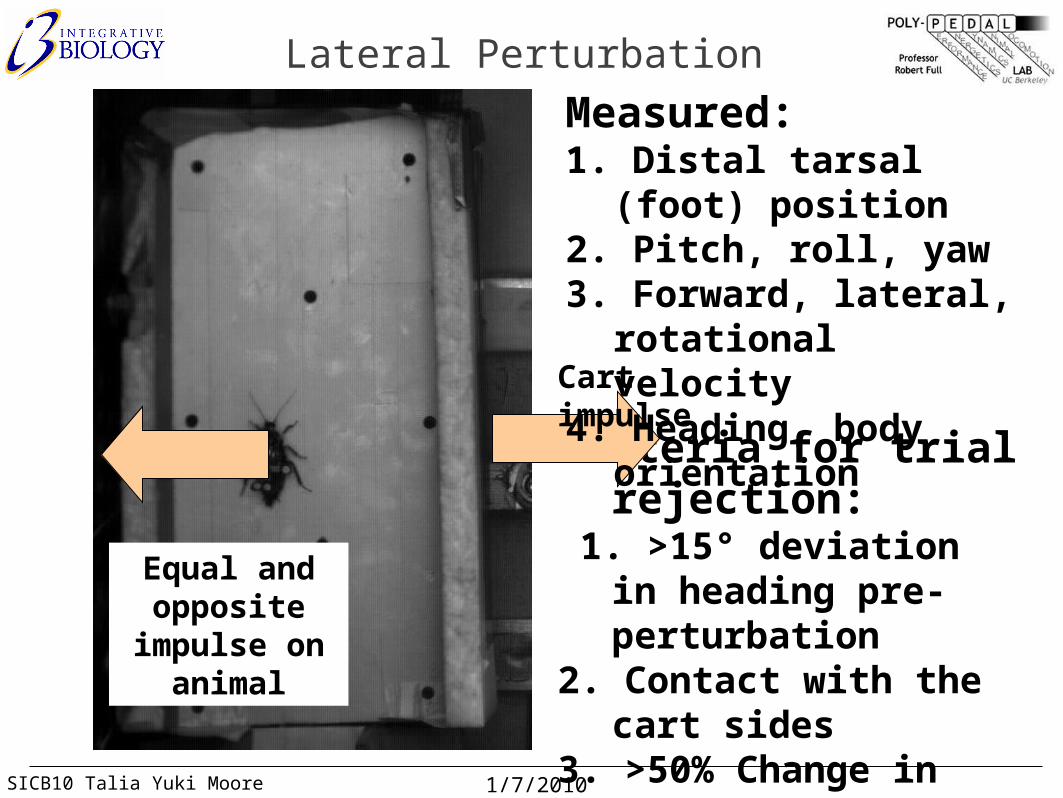
Perturbation
Perturbation
Perturbation
Perturbation
Tars
al F
ore-
Aft
Posi
tion
Feedback - Mechanical, Neural or Both?
Time Time
Res
idua
l Pha
se
SICB10 Talia Yuki Moore 1/7/2010
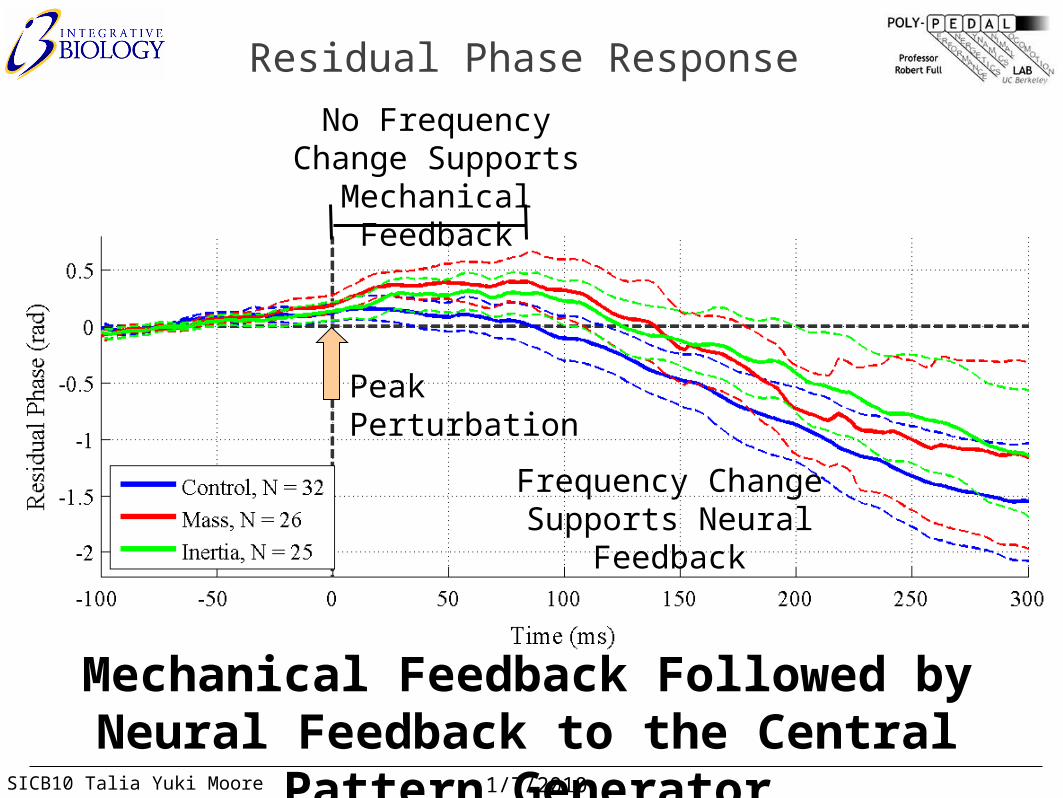
No Frequency Change Supports Mechanical
Feedback
Residual Phase Response
Mechanical Feedback Followed by Neural Feedback to the Central Pattern Generator
Frequency Change Supports Neural
Feedback
Peak Perturbation
SICB10 Talia Yuki Moore 1/7/2010
Conclusions
1. Changes in body mass and form affect response to perturbations. Mechanical feedback important early in response.
2. Increased moment of inertia reduces and delays response to perturbation, but limits maneuverability.
3. Passive horizontal plane model (Lateral Leg Spring) is insufficient to explain response to lateral perturbations. Higher degree of freedom models needed.
32
SICB10 Talia Yuki Moore 1/7/2010
Three Dimensional Models
Spring-Loaded Inverted Pendulum (SLIP)
Lateral Leg Spring (LLS) Seipel 2005
Spring Loaded Inverted Pendulum (SLIP)
Lateral Leg Spring (LLS)
SICB10 Talia Yuki Moore 1/7/2010
Conclusions
4. Hexapods overcompensate in recovery perhaps providing greater stability to another perturbation from the same direction. Neural feedback to CPG may assist.
5. Placement of payload in legged robots can learn from nature.34
1. Changes in body mass and form affect response to perturbations. Mechanical feedback important early in response.
2. Increased moment of inertia reduces and delays response to perturbation, but limits maneuverability.
3. Passive horizontal plane model (Lateral Leg Spring) is insufficient to explain response to lateral perturbations. Higher degree of freedom models needed.
SICB10 Talia Yuki Moore 1/7/2010
Guidance, Input, and Advice:Berkeley Biomechanics GroupProf. Robert FullPolyPEDAL Lab