Page 1
Signals in Robot Control:Two Primary Approaches
I. Percept Inversion
Stimulus = f (World) World = f−1(S)
m −1m
• geometric reconstruction provides a representation forplanning and deliberation
• frame problem - completeness issues
• the functions, f (), are only partially known, and aregenerally difficult to invert
• time spent “perceiving” often renders world modelsobsolete
1 Copyright c©2014 Roderic Grupen
Page 2
Signals in Robot Control:Two Primary Approaches
II. Behavior Based Perception
2M
M 6
M 5
M 4
M 3
M 1
...f61
f6N
...f
f51
5N
...f
f41
4N
...f
f31
3N
...f
f21
2N
...f
f11
1N
• “the world is its own best representation”
• correlation over multi-sensor time-series feedback
• interaction - actions influence perceptions
• task-specific solutions to the frame problem
2 Copyright c©2014 Roderic Grupen
Page 3
Vision - Light and Matter
• Energy from a light source is radiated uniformly over 4π stera-dians → 1/R2 energy distribution from a point source
• the sun delivers about 1200Watts/m2 at noon on the equator
• at optical interfaces
– transmittion (refraction)
– reflection -diffuse or specular depending on surface prop-erties and wavelength.
– absorption - heat
– heat - black body radiation
• each encounter changes the properties of light - spectral con-tent, intensity, and polarization
...light signals carry a tremendous amount of information...
3 Copyright c©2014 Roderic Grupen
Page 4
Vision - Pinhole Camera Revisited
v =fyz
zu =fx
pinholeaperture
planeimage
planeimage
pinholeaperture
focallength
focallength
v
z
u
y
xu
v
zy
x
• 5th century BC - Chinese philosopher Mo-Ti created an in-verted image by passing light through a pinhole into a darkened“collecting place.”
• ca. 350 BC - Aristotle viewed the eclipsing sun projected onthe ground through the holes in a sieve
• 10th century - Arabian scholar Alhazen of Basra created aportable solar observatory
• 15th - notebooks of Leonardo Da Vinci
• 17th century - Johannes Kepler - “camera obscura” (Latin for“room” and “dark,” respectively)
4 Copyright c©2014 Roderic Grupen
Page 5
Vision - Pinhole Camera Revisited
v =fyz
zu =fx
pinholeaperture
planeimage
planeimage
pinholeaperture
focallength
focallength
v
z
u
y
xu
v
zy
x
• (1558) Giovanni Battista Della Porta “Magiae Naturalis” rec-ommended the camera obscura as a drawing aid for artists...
• 18th century artists used the camera obscura - Jan Vermeer,Canaletto, Guardi, and Paul Sandby
• 19th century - a sheet of light sensitive paper transforms thecamera obscura into the modern photographic camera.
What’s wrong with the pinhole camera?
5 Copyright c©2014 Roderic Grupen
Page 6
Optics and Image Acquisition
optics
imageplane
source
...the radiant intensity function is projected onto a 2D im-age plane, sampled spatially, and digitized 30 times eachsecond...
6 Copyright c©2014 Roderic Grupen
Page 7
Optics and Refraction - Gathering Light
Snell’s Law
incident
transmitted
reflected
Index of Refraction — theratio of the speed of light in avacuum to that in the optical ma-terial.
n =c
v=
√
ǫµ
ǫ0µ0
where
µ − magnetic permeability, and
ǫ − electric permittivity.
sin(θincident)
sin(θtransmitted)=
nt
ni,
7 Copyright c©2014 Roderic Grupen
Page 8
Optics - Gaussian Lens Formula
Biconvex Thin Lens
1
S1+
1
S2=
1
f
f
2SS1
f
8 Copyright c©2014 Roderic Grupen
Page 9
The Eye
(a) (b) (c) (d) (e)
cornea
iris
retinalens
pupil
suspensory ligaments
ciliarymuscle
aqueous humorvitreous
humor
visualaxis
blindspot
fovea
nasaltemple retina
80O
60O
40O
20O20
O
40O
60O
80O
opticnerve
(f)
superior oblique
superior rectus
inferiorrectus
inferioroblique
lateralrectus
levatorpalpebraesuperioris
superior oblique
superior rectus
medialrectus
inferiorrectus
inferioroblique
lateralrectus
superior rectus
inferioroblique
inferiorrectus
medialrectus
superior oblique
lateralrectus
9 Copyright c©2014 Roderic Grupen
Page 10
Natural Variation
bees, fish, butterflies, birds and reptiles - capable of see-ing color—most mammals do not.
Herbivores - Side facing (monocular) vision systems yield al-most wrap around field of view.
Carnivores - forward facing (stereo) system provides precisiondepth and a narrower field of view (< 180 degrees)
Cheetah - wide, eccentric foveal region spanning horizontal bandfor locating prey against the horizon
Chamelion - turret eyes capable of both side- and forward-lookingconfigurations
Nocturnal - reflective back surface of retina - small birds sacrificemuscles for size. The largest eye belongs to the giant squid—upto 15 inches in diameter.
Fishing - fishing birds use polarizing lens
Rattlesnake - eyes oriented to side, forward-looking stereo pitorgans (no lens).
10 Copyright c©2014 Roderic Grupen
Page 11
Where is the Information?
2M
M 6
M 5
M 4
M 3
M 1
...f61
f6N
...f
f51
5N
...f
f41
4N
...f
f31
3N
...f
f21
2N
...f
f11
1N
Information (the opposite of noise) resides in signalsthat exhibit reliable spatiotemporal structure
andyou can create spurious artifacts on signals
everytime you “touch” them...
11 Copyright c©2014 Roderic Grupen
Page 12
Sampling - Spectral Propertiesof the Signal
Dirac delta operator:
δ(x− ξ) =
{
∞ x = ξ0 otherwise
This function has the following properties:
ǫ∫
−ǫ
δ(x)dx = 1 for ǫ > 0
∞∫
−∞
F (ξ)δ(x− ξ)dξ = F (x) Sifting Property
12 Copyright c©2014 Roderic Grupen
Page 13
Sampling - Spectral Propertiesof the Signal
Fourier Transform
F [f (x)] = F (u) =
∞∫
−∞
f (x)exp{−i(2π(ux)}dx
where u is the spatial frequency (in cycles/meter), so that whenx is specified in meters, (2πux) is in radians, and i =
√−1.
F−1[F (u)] = f (x) =
∞∫
−∞
F (u)exp{i(2π(ux))}du
13 Copyright c©2014 Roderic Grupen
Page 14
Fourier Transform Pairs
F (ω) = F(f(x)) =
∫ ∞
−∞f(x)e−iωxdx ω(rad/pixel) = 2πu(cycles/pixel)
Name f(x) F (ω)
rectangular function rect(x) = 1 − 12 < x < 1
2 sinc(ω/2π) = sin(ω/2)ω/2
triangular function tri(x) = 2(x+ 12) − 1
2 < x < 0 sinc2(ω/2π)1− 2(x) 0 < x < 1
2
Gaussian e−α|x| 2α/(α2 + ω2)
e−px2 1√2pe−ω2/4p
unit impulse δ(x) 1
comb function∑
n δ(x− nx0)1x0
∑
n δ(ω2π − n
x0
)
14 Copyright c©2014 Roderic Grupen
Page 15
Example: Human Voice
the open-closed resonance cavity—a constant diameter tube openat one end that radiates sound pressure into an infinitely largerenvironment
the open end of the cavity reflects an inverted pressure wave
F = 1/4(c/L) Hz1
F = 3/4(c/L) Hz2
F = 5/4(c/L) Hz3
f(t) = sin(2 F t)2
f(t) = sin(2 F t)3
st1 formantnd
2 formant rd3 formant
f(t) = sin(2 F t)1
ωn = (2n− 1)(c/4L)
several resonance modes (formants) exist simultaneously
15 Copyright c©2014 Roderic Grupen
Page 16
Example: Spectral Evaluation
“...the rainbow passage...”
A screen capture from an analysis by the Computerized SpeechLab (courtesy Dr. M. Andrianopoulos): frequency content versustime; sound pressure level as a function of frequency, and ampli-tude versus time for a vocalization.
16 Copyright c©2014 Roderic Grupen
Page 17
Example: Spectral Evaluation
...a prolonged [a] vowel changes the relative placement and ampli-tude of the resonance modes (formants) of the vocal tract
F1 vs. F2 vowel chart for 10 vowelsounds sampled from men, women,and children.
17 Copyright c©2014 Roderic Grupen
Page 18
Shift Theorem
F [f (x)] =
∞∫
−∞
f (x)exp{−i(2πux)}dx, then
F [f (x− a)] =
∞∫
−∞
f (x− a)exp{−i(2πux)}dx, then
=
∞∫
−∞
f (x′)exp{−i(2πu(x′ + a))}dx′, and
= exp{−i(2πua)}∞∫
−∞
f (x′)exp{−i(2πux′)}dx′,
so that
F [f (x− a)] = exp{−i(2πua)}F(f (x))
18 Copyright c©2014 Roderic Grupen
Page 19
Convolution Theorem
f (x) ∗ g(x) = h(x) =
∫ ∞
−∞f (α)g(x− α)dα
where α an integration variable.
F [f (x) ∗ g(x)] = F [h(x)]
= F[∫
α
f (α)g(x− α)dα
]
=
∫
x
[∫
α
f (α)g(x− α)dα
]
exp{−i2πux}dx
=
∫
α
f (α)
[∫
x
g(x− α)exp{−i(2πux)}dx]
dα
and by the Shift theorem,
=
∫
α
f (α)exp{−i(2πuα)}dα∫
x
g(x)exp{−i(2πux)}dx,
and therefore,F [f (x) ∗ g(x)] = F (u)G(u)
spatial/temporal convolution ↔ frequency domain multiplication
19 Copyright c©2014 Roderic Grupen
Page 20
Sampling Theorem - Aliasing
A continuous spatial function, f (x)is sampled by computing the prod-uct of f (x) and g(x), an infinite se-quence of Dirac delta operators.
h(x) = f (x)∑
n
δ(x− nx0)
=∑
n
f (nx0)δ(x− nx0)
By the convolution theorem, theproduct of these two spatial func-tions is the convolution of theirFourier transform pairs.
f(x)
g(x)
h(x)
x02 x04 x06x0−2x0−4x0−6
f (x)F−→ F (u)
∑
n
δ(x− nx0)F−→ 1
x0
∑
n
δ(u− n
x0) = G(u), and
H(u) = F (u) ∗G(u)
20 Copyright c©2014 Roderic Grupen
Page 21
Sampling Theorem - Aliasing (cont.)
H(u) = F (u) ∗G(u)
We may write the function H(u) in terms of F (u):
H(u) = F (u)∗[
1
x0
∑
n
δ(u− n
x0)
]
=
∫ ∞
−∞F (α)G(u− α)dα
=
∫ ∞
−∞F (α)
[
1
x0
∑
n
δ(u− α− n
x0)dα
]
=1
x0
∫ ∞
−∞
∑
n
F (u− n
x0)δ(u− α− n
x0)dα
=1
x0
∑
n
F (u− n
x0)
∫ ∞
−∞δ(u− α− n
x0)dα
H(u) =1
x0
∑
n
F (u− n
x0)
the frequency spectrum of the sampled image contains of dupli-cates of the spectrum of the original image distributed at 1/x0frequency intervals.
21 Copyright c©2014 Roderic Grupen
Page 22
Aliasing (cont.)
x01/ x02/x0−1/x0
−2/
x01/ x02/x0−1/x0
−2/
(a)
(b)
Η( )ω R( )H( )ω ω
R(u) is a frequency domainbandpass filter
R(u) = 1 if |u| < 1/(2x0),
0 otherwise
Aliasing: When replicated spectra interfere, the crosstalk intro-duces energy at relatively high frequencies changing the appear-ance of the reconstructed image.
The Sampling Theorem:
If the image contains no frequency components greater than
one half the sampling frequency, then the continuous image is
faithfully represented in the sampled image.
22 Copyright c©2014 Roderic Grupen
Page 23
Early Processing - Convolution
f (x, y)∗g(x, y) = h(x, y) =
∫ ∞
−∞
∫ ∞
−∞f (u, v)g(x−u, y−v)dudv
or
f (x, y) ∗ g(x, y) = h(x, y) =
∞∑
−∞
∞∑
−∞f (u, v)g(x− u, y − v)
g(x,y)
h(x,y)
h(n,n)
f(3,3)
g(n,n)
23 Copyright c©2014 Roderic Grupen
Page 24
Early Processing
...if you know what you’re looking for, convolution can be used asa means of approximating the correlation of a signal fragment toa reference template...
Rgt =∑
α
∑
β
t(α, β)g(x + α, y + β).
maxima in Rgt are minima in:
α∑
i=−α
β∑
j=−β
[g(x + i, y + j)− t(α, β)]2
24 Copyright c©2014 Roderic Grupen
Page 25
Frei and Chen Templates
...patterns of responses can be more robust andmore informative than single operators...
1 1 11 1 11 1 1
f0
−1 −√2 −1
0 0 0
1√2 1
f1
−1 0 1
−√2 0
√2
−1 0 1
f2
0 −1√2
1 0 −1
−√2 1 0
f3
√2 −1 0
−1 0 1
0 1 −√2
f4
0 1 0−1 0 −10 1 0
f5
−1 0 10 0 01 0 −1
f6
1 −2 1−2 4 −21 −2 1
f7
−2 1 −21 4 1−2 1 −2
f8
Frobenius inner product A : B = trace(ABT ) = trace(ATB) ofany pair of Frei-Chen operators is zero
each operator captures an independent “shape” in 3× 3neighborhoods of the luminosity surface
the image is characterized as a vector of responses, h(x, y), where
hk = fk ∗ g, k ∈ [0, 8].
25 Copyright c©2014 Roderic Grupen
Page 26
Frei and Chen Templates
hk = fk ∗ g
Edge Energy(x, y) =
2∑
k=1
h2k(x, y)
Total Energy(x, y) =
8∑
k=0
h2k(x, y)
define:
cos(θ) =
(
EE
TE
)1/2
gradientmagnitudethreshold
Frei−Chenthreshold
TotalEnergy
Edge Energy
TotalEnergy
Edge Energy
θ
1
1EE(x ,y )1
EE(x ,y )2 2
1EE(x ,y )1
EE(x ,y )2 2
26 Copyright c©2014 Roderic Grupen
Page 27
Early Processing -Differential Geometry
Low Pass Filter
g(x)
h(x)
f(x)
*h = f g
1
x−1/2 +1/2
rect(x)sinc( ) =
ω2π (ω/2)
ω/2sin( )1
5 10 15 20 250−5−10−15−20−25ω
F
F−1
27 Copyright c©2014 Roderic Grupen
Page 28
Early Processing -Gradient Operators
Intensity Gradients
∇g =dg
dxx +
dg
dyy
dg(x, y)
dx≈ g(x + 1, y)− g(x− 1, y)
2⇒ fx =
[
−1
2, 0,
1
2
]
1×3
dg(x, y)
dy≈ g(x, y + 1)− g(x, y − 1)
2⇒ fy =
−12012
3×1
|∇g| =
[
(
dg
dx
)2
+
(
dg
dy
)2]
12
=
φ = tan−1
(
dg/dy
dg/dx
)
28 Copyright c©2014 Roderic Grupen
Page 29
Edge Operators
operator ∇1 ∇2
Roberts[
0 1−1 0
] [
1 00 −1
]
Prewit
−1 0 1−1 0 1−1 0 1
1 1 10 0 0
−1 −1 −1
Sobel
−1 0 1−2 0 2−1 0 1
1 2 10 0 0
−1 −2 −1
29 Copyright c©2014 Roderic Grupen
Page 30
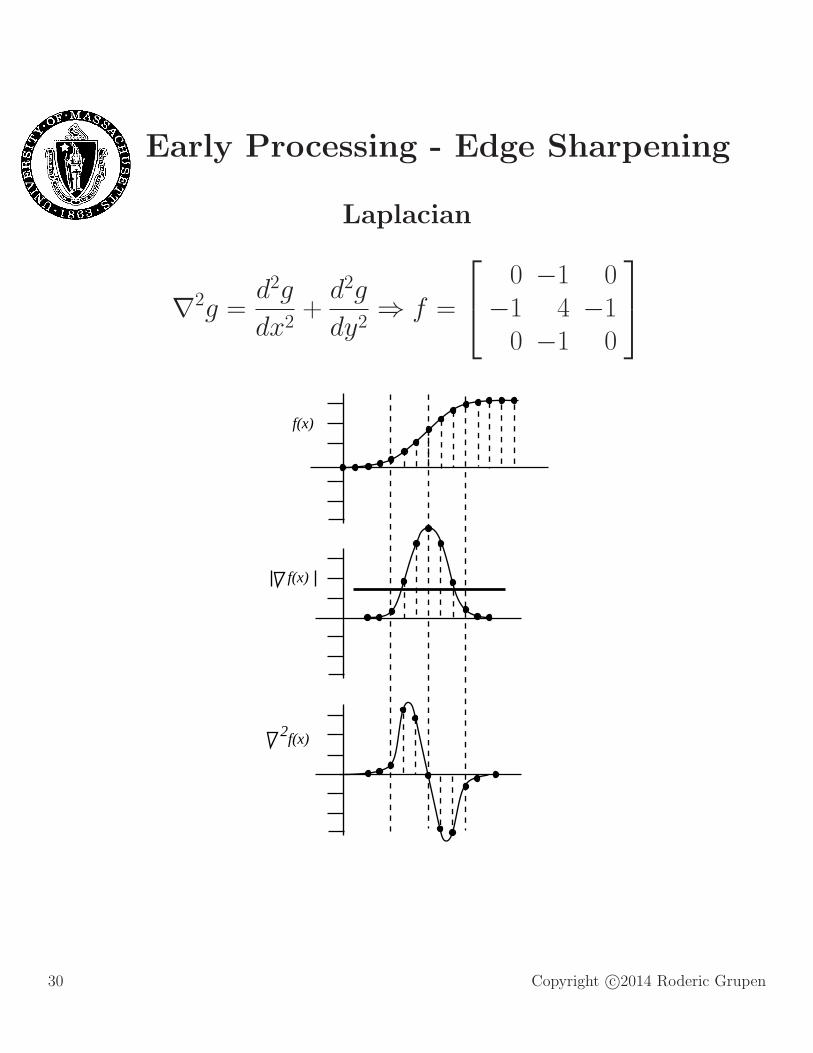
Early Processing - Edge Sharpening
Laplacian
∇2g =d2g
dx2+
d2g
dy2⇒ f =
0 −1 0−1 4 −10 −1 0
2
f(x)
f(x)
f(x)
30 Copyright c©2014 Roderic Grupen
Page 31
Summary: Signals, Sampling, and Features
• optics and the evolution of the eye
• spectral analysis and the sampling theorem
• convolution - feature-based early processing, the spectral in-terpretation of convolution operators
Today: Deep Structure and Information
• differential structure - edge sharpening algorithm
• the Canny edge operator and Gaussian operators
• multi-scale feature detectors
– edge sharpening revisited
– gauge coordinates and scale space
– oriented edges, ridges, corners, blobs
31 Copyright c©2014 Roderic Grupen
Page 32
Deep Structure
...consider a multivariate signal f (x1, . . . , xn) in the vicinity of(x01, . . . , x
0n), represented by its Taylor series expansion:
f (x1, . . . , xn) = f (x01, . . . , x0n)+
∞∑
m=1
∑
k1,...,kn∑
j kj=m
∂mf (x01, . . . , x0n)
∂xk11 · · · ∂xknn
[
(x1 − x01)k1
k1!· · · (xn − x0n)
kn
kn!
]
Definition (N-jet): spatial derivatives
∂mf (x01, . . . , x0n)
∂xk11 · · · ∂xknn, m ∈ [0, N ],
∑
j
kj = m.
characterize differential structure up to order N .
32 Copyright c©2014 Roderic Grupen
Page 33
Scale Space and the N-jet
Image Processing
the N -jet of order 2 for function f (x, y) is the set(
f,∂f
∂x,∂f
∂y,∂2f
∂x2,
∂2f
∂x∂y,∂2f
∂y2
)
.
Topological structure in the luminance function (critical points,extremum, ridge points, corners, blobs) can be captured in termsof differential structure and form a basis for structural informationtheory.
Structures that are persistent across the scale dimension constitutethe “deep structure” of signals.
f (x, y, σ)
.
...how should N -jet operators be chosen?
33 Copyright c©2014 Roderic Grupen
Page 34
Differential Convolution Operators
Suppose:
f (x) : image function
gσ(x) =1√2πσ
e−x2/2σ2 : Gaussian smoothing function
Then:
f ∗ g ⇒ bandlimited approximation of image f (x)
⇒ suppress noise prior to differentiationd
dt(f ∗ g) ⇒ edges in the image f (x)
Canny Edge Operator
d
dt(f ∗ g) = f ∗ d
dtg
34 Copyright c©2014 Roderic Grupen
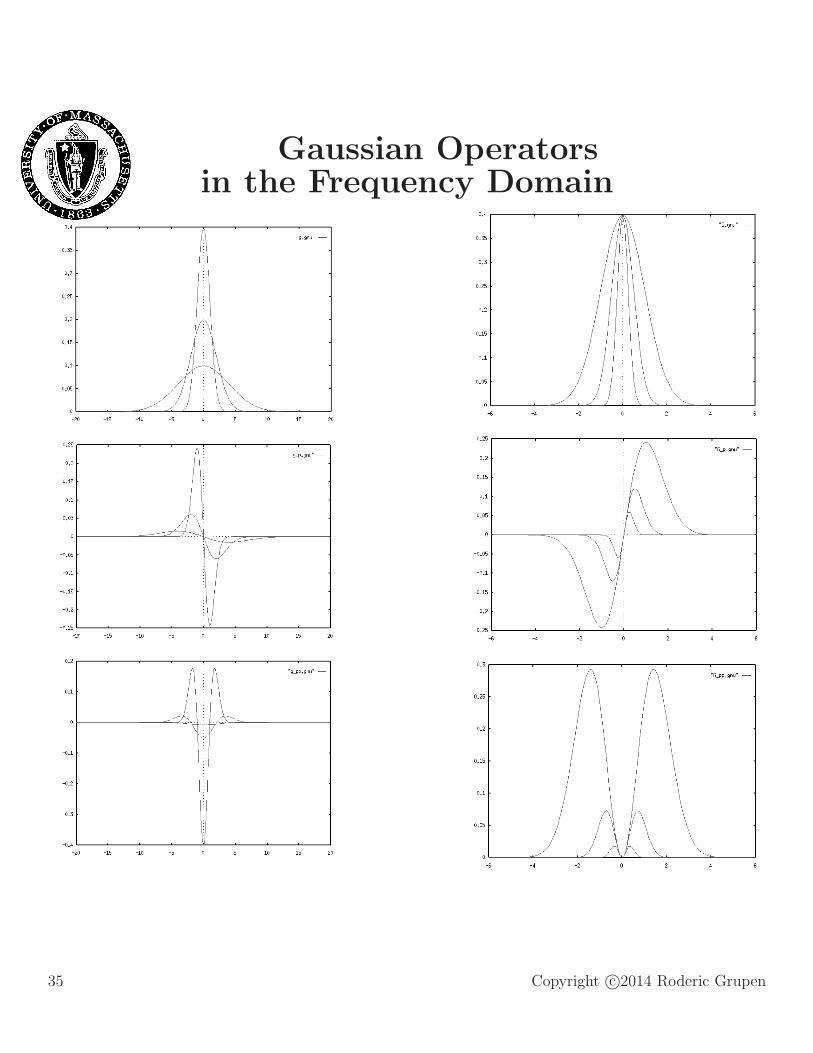
Page 35
Gaussian Operatorsin the Frequency Domain
35 Copyright c©2014 Roderic Grupen
Page 36
Multi-Scale Feature Detectors
from before, edge sharpening:
∇2f (x, y) = 0, and
|∇f | > τ.
Oriented Edges
“steerable” filters - gauge coordinates
a local orthonormal coordinate frame (u, v) oriented with the v-axis parallel to the gradient direction at position (x, y).
by this definition, fv is always positive and the lateral first deriva-tive, fu, is zero.
fvv = 0, and
fvvv < 0.
• coarse scales suppress noise, fine scales localize more precisely,
• most sharp edge structures corresponding to object boundariesexist simultaneously at many scales.
36 Copyright c©2014 Roderic Grupen
Page 37
Multi-Scale Oriented Edges
Edges reported at t=1.0, 16.0, and 256.0, respectively
37 Copyright c©2014 Roderic Grupen
Page 38
Multi-Scale Feature Detectors
Oriented Ridges
gauge coordinates (p, q) - aligns the local principal curvature ofthe luminocity function such that off-diagonal terms in the imageHessian, fpq = fqp = 0.
A ridge is an extremum in the direction of the maximum principalcurvature, which we align with direction p:
fp = 0,
fpp < 0, and |fpp| ≥ |fqq|
dominant ridge structures can be found at all scales.
38 Copyright c©2014 Roderic Grupen
Page 39
Multi-Scale Oriented Ridges
Ridges reported at t=1.0, 16.0, and 256.0, respectively
39 Copyright c©2014 Roderic Grupen
Page 40
Intrinsic Scale
feature featuretype strength
edge√σ
21/4fv
ridge σ3
23/2(fpp − fqq)
2
corner σ4
4 fvfuu
blob σ2
2 ∇2f
search for scales at which feature strength is maximized
40 Copyright c©2014 Roderic Grupen
Page 41
Intrinsic Scale - Corners, and Blobs
41 Copyright c©2014 Roderic Grupen