Single-letter Characterization of Signal Estimation from Linear Measurements Dongning Guo Dror Baron Shlomo Shamai The work has been supported by the European Commission in the framework of the FP7 Network of Excellence in Wireless Communications NEWCOM++, by the Israel Science Foundation, and by the National Science Foundation.
Transcript
Single-letter Characterization of Signal Estimation
from Linear Measurements
Dongning Guo
Dror Baron
Shlomo Shamai
The work has been supported by the European Commission in the framework of the FP7 Network of Excellence in Wireless Communications NEWCOM++, by the Israel Science Foundation, and by the National Science Foundation.
Linear Measurement Systems
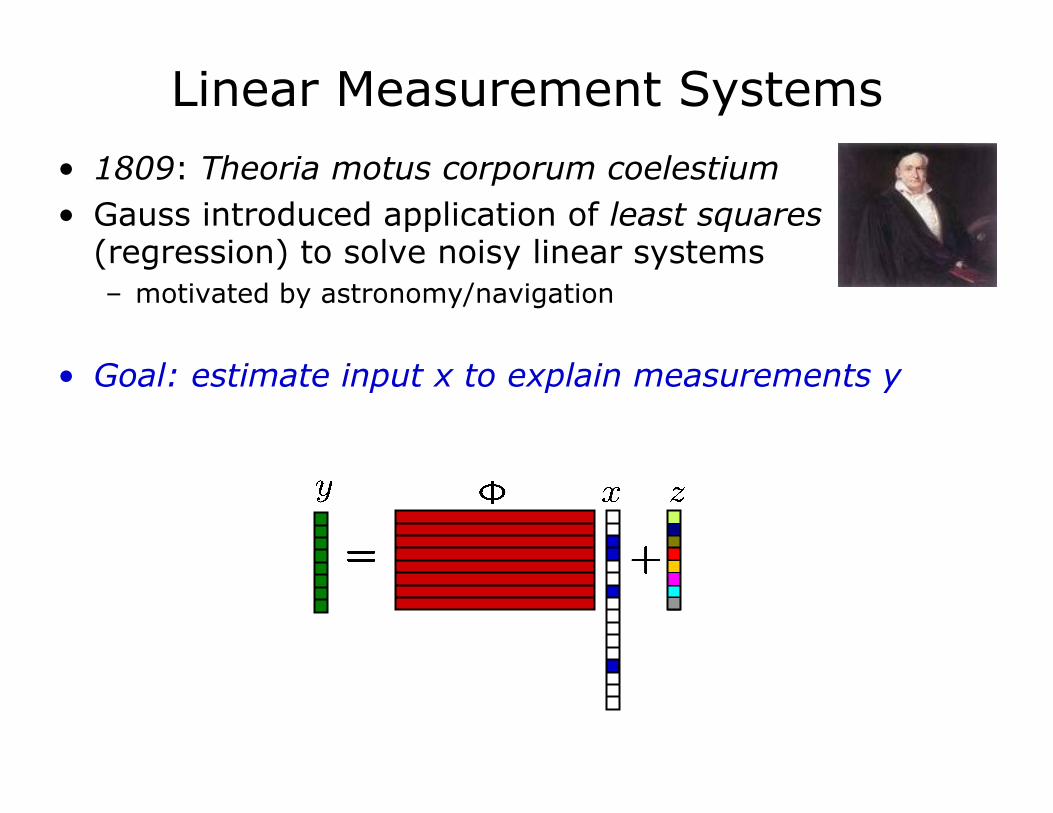
• 1809: Theoria motus corporum coelestium • Gauss introduced application of least squares
(regression) to solve noisy linear systems – motivated by astronomy/navigation
• Goal: estimate input x to explain measurements y
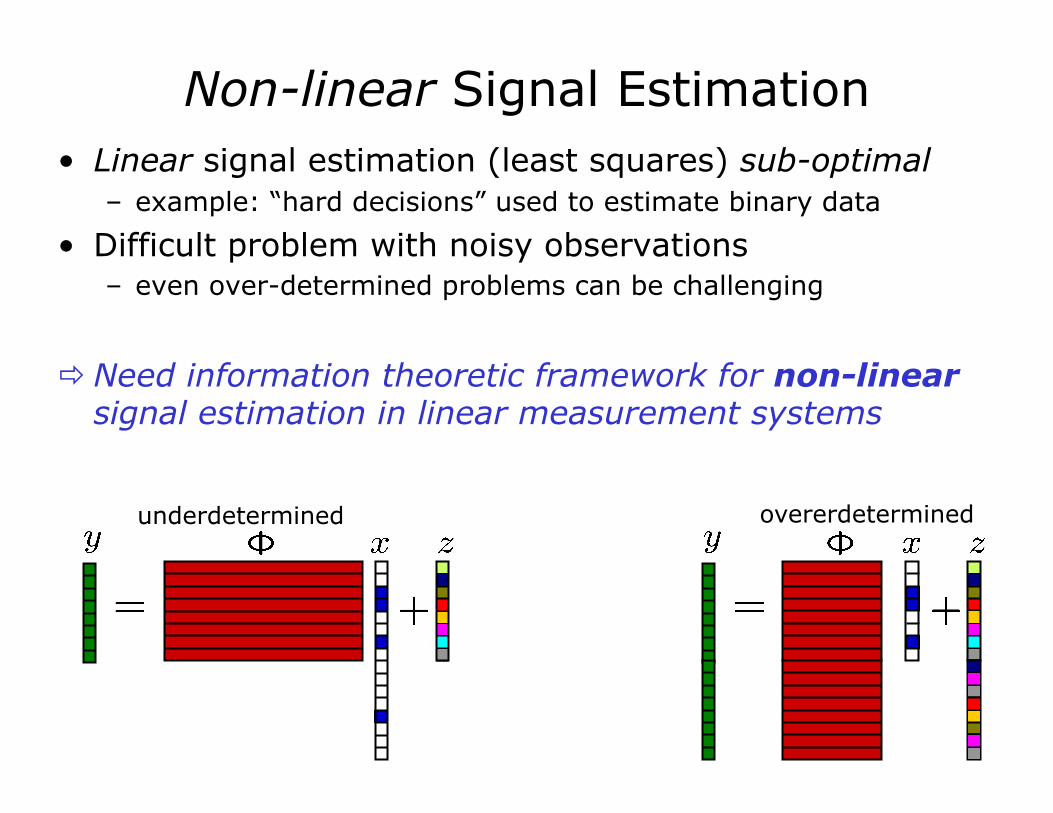
Non-linear Signal Estimation • Linear signal estimation (least squares) sub-optimal
– example: “hard decisions” used to estimate binary data
• Difficult problem with noisy observations – even over-determined problems can be challenging
Need information theoretic framework for non-linear signal estimation in linear measurement systems
underdetermined overerdetermined
Linear Measurement Application Areas
Compressed sensing
Multiuser communication (CDMA)
• Medical imaging (tomography)
• Financial prediction
• Electromagnetic scattering
• Seismic imaging (oil industry)
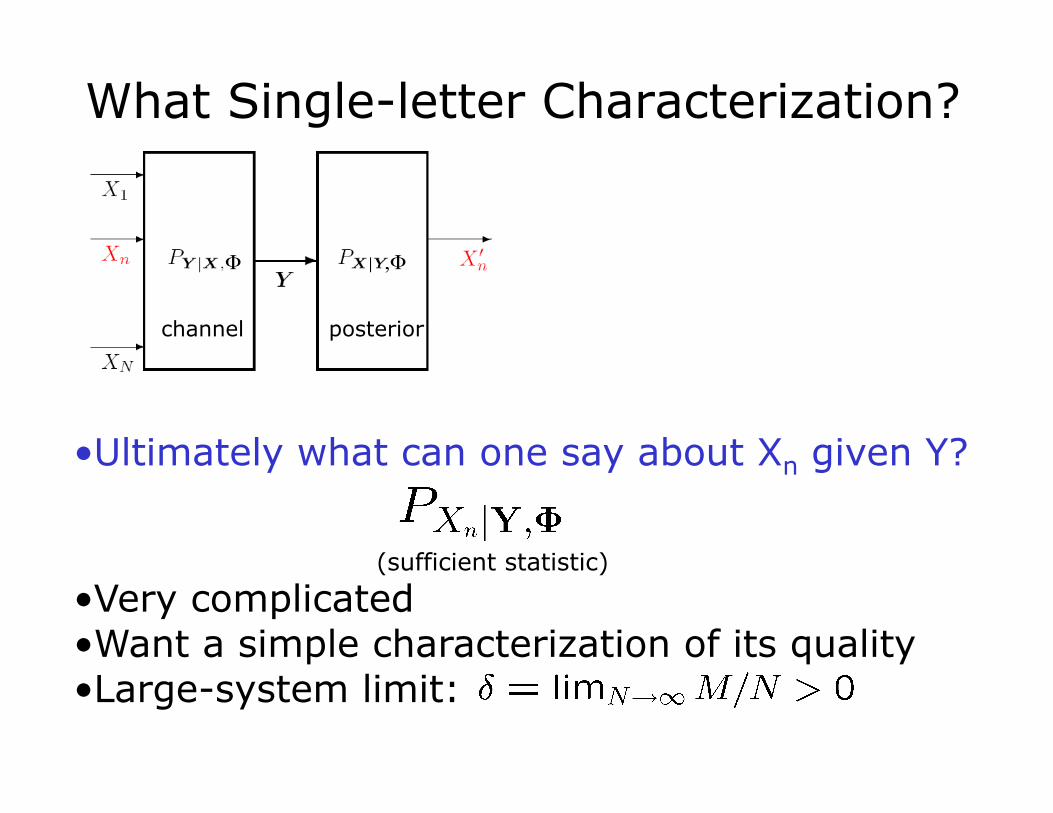
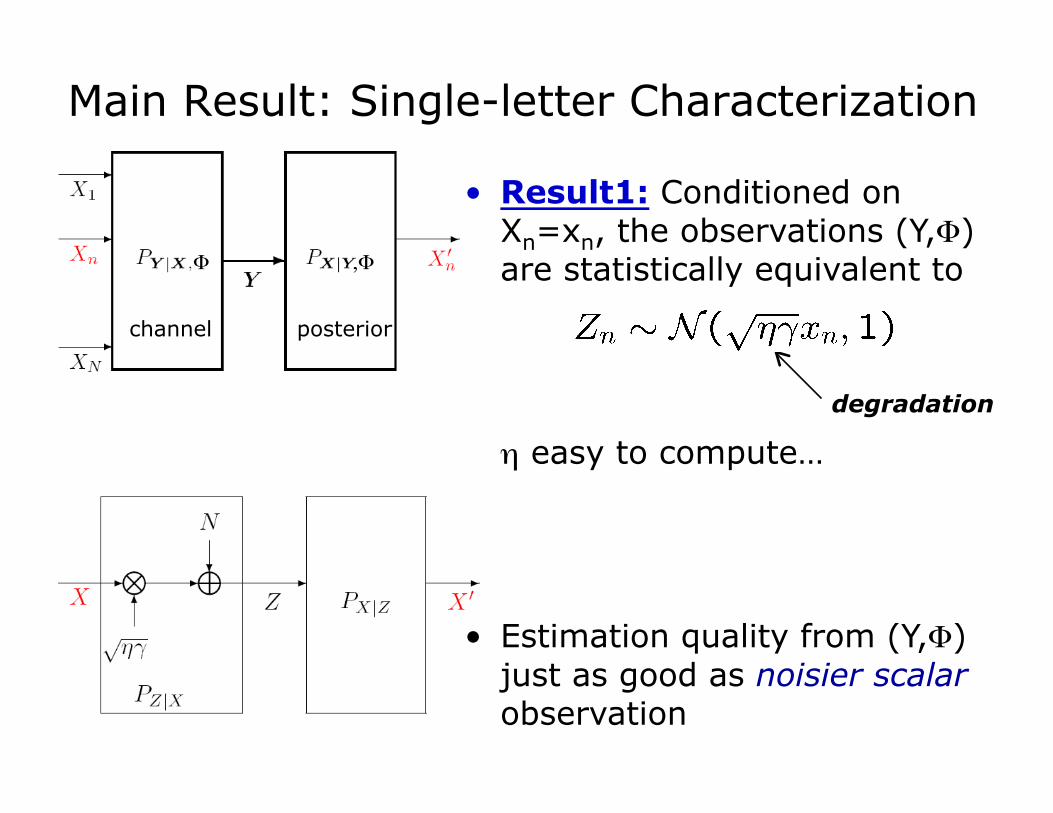
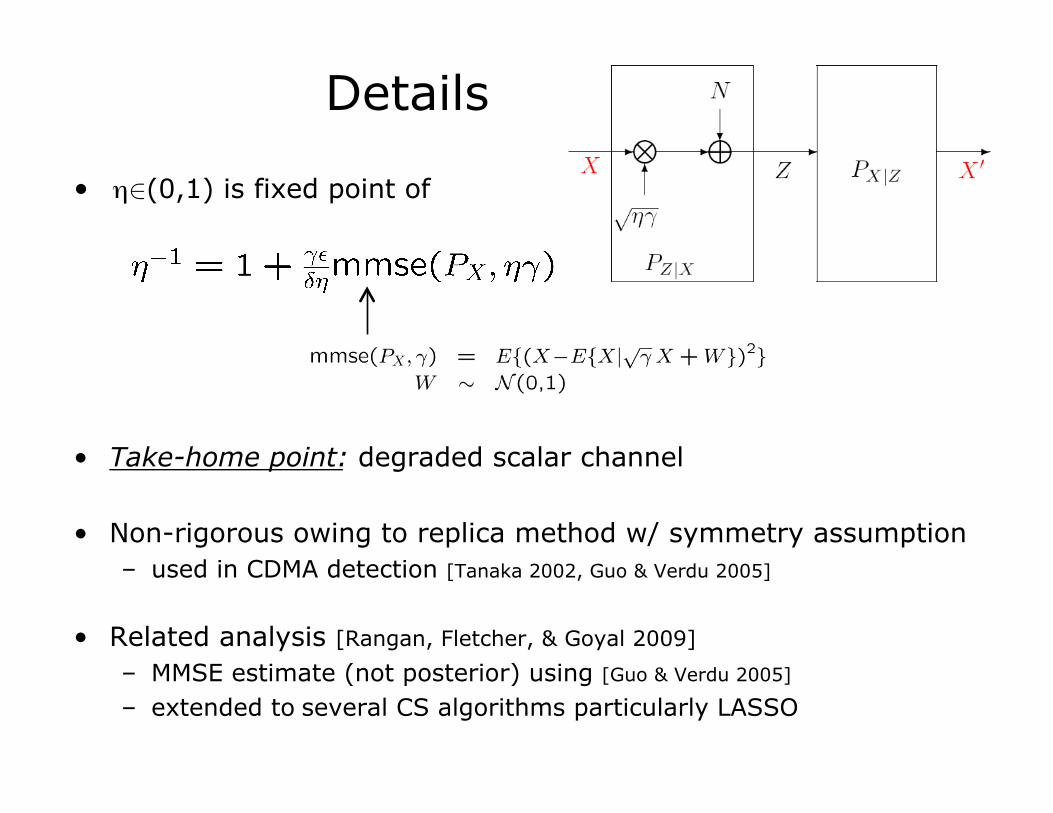
Problem Definition
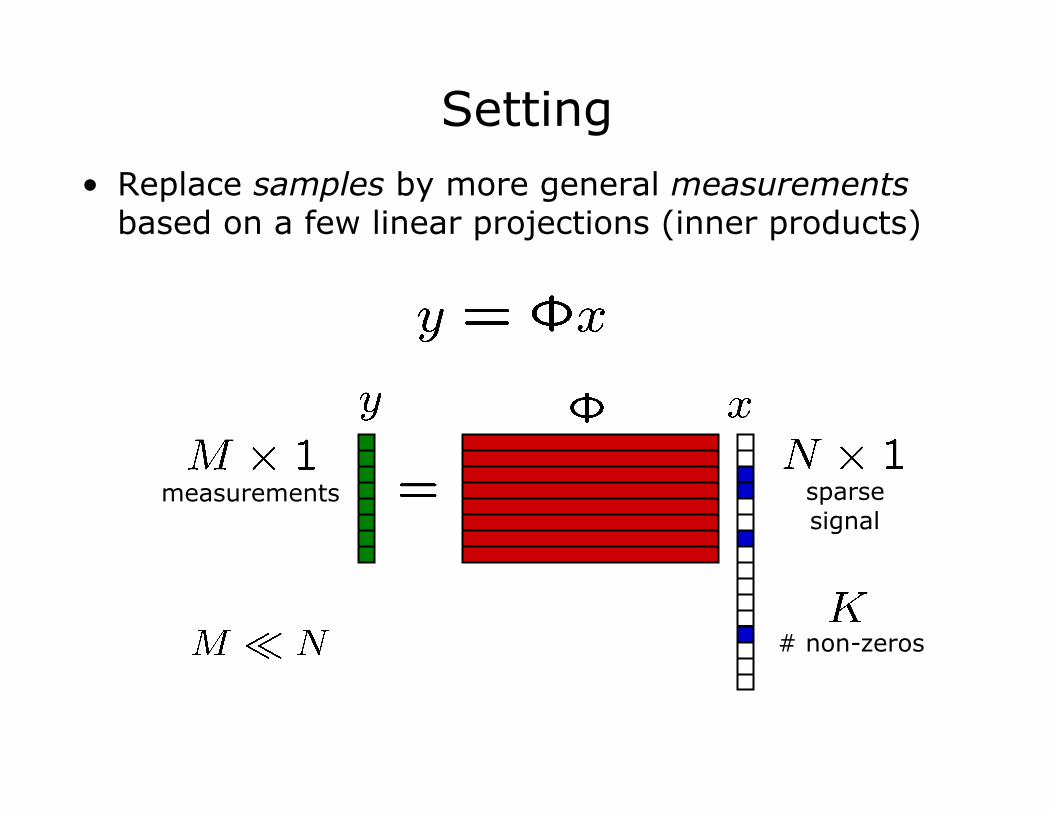
Setting • Replace samples by more general measurements
based on a few linear projections (inner products)
measurements sparse signal
# non-zeros
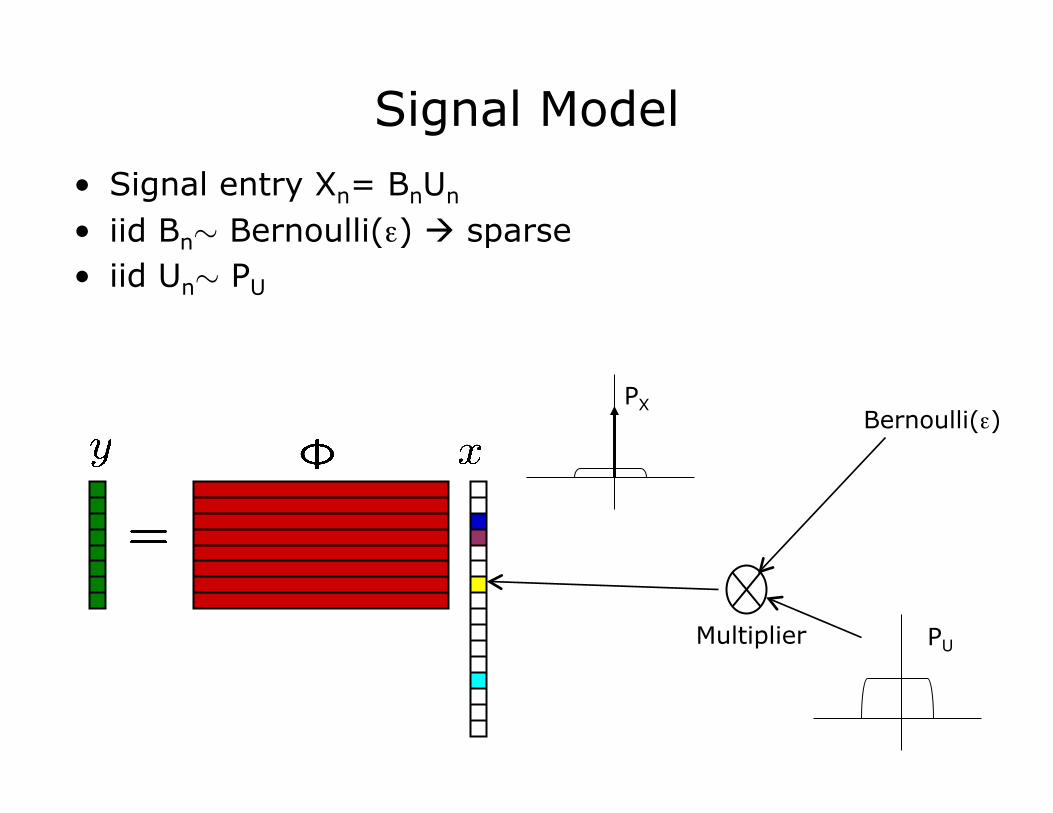
Signal Model • Signal entry Xn= BnUn
• iid Bn» Bernoulli(ε) sparse • iid Un» PU
PU
Bernoulli(ε)
Multiplier
PX
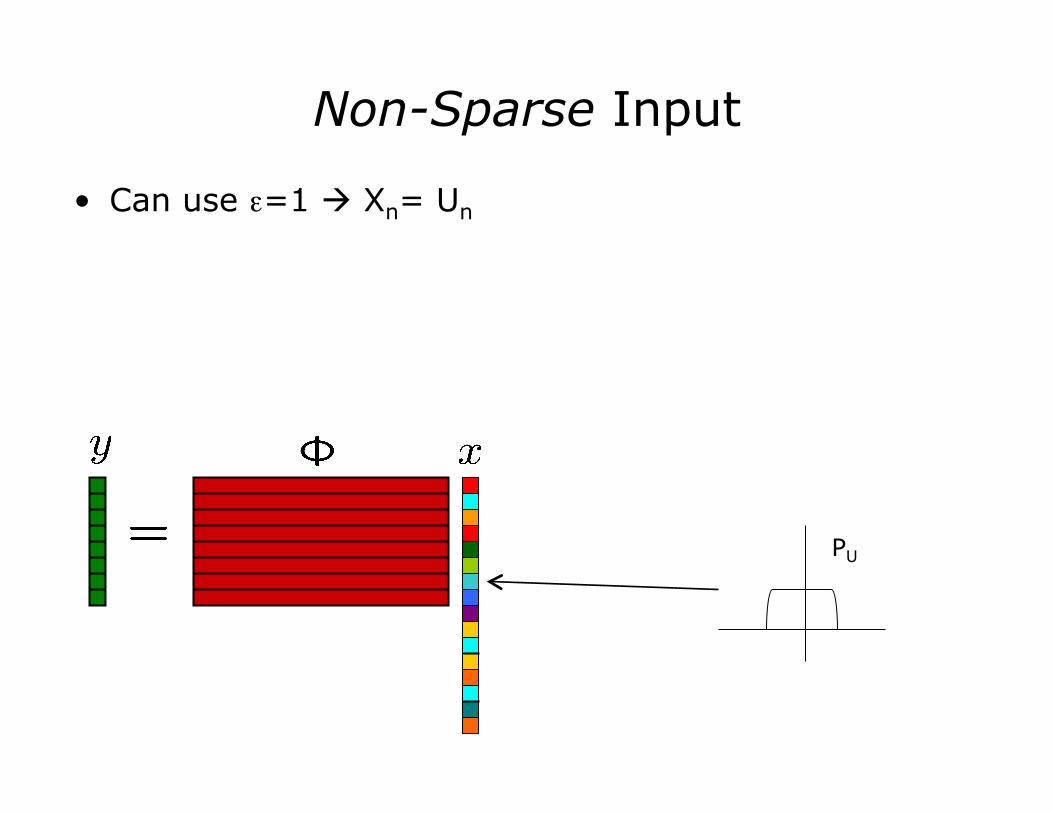
Non-Sparse Input
• Can use ε=1 Xn= Un
PU
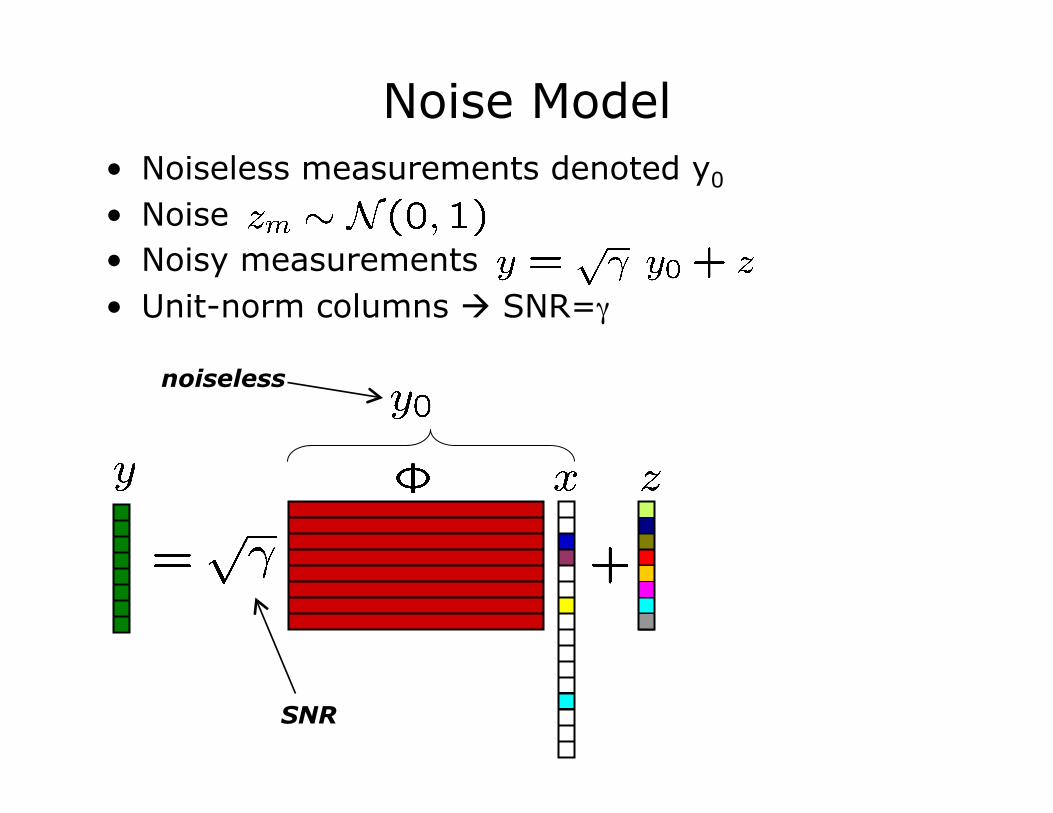
Measurement Noise • Measurement process is typically analog • Analog systems add noise, non-linearities, etc.
• Assume Gaussian noise for ease of analysis
• Can be generalized to non-Gaussian noise [Guo & Wang 2007; Rangan 2010]