“MatI” — 2018/3/6 — 12:59 — page 1 — #17 Capítulo 1 Sistemas de Ecuaciones Lineales. Matrices y su álgebra This is your last chance. After this, there is no turning back. You take the blue pill - the story ends, you wake up in your bed and believe whatever you want to believe. You take the red pill - you stay in Wonderland and I show you how deep the rabbit-hole goes. Matrix, hermanas Wachoski, 1999. Este primer capítulo tiene un marcado carácter introductorio. De forma implícita se asume que el lector está familiarizado con buena parte de los conceptos básicos (sistemas de ecuaciones lineales, matrices, producto es- calar y norma de vectores, etc) de una asignatura básica de Álgebra. Ello nos permite hacer una exposición más relajada y algo más desordenada. En cualquier caso los resultados se exponen de forma detallada lo que permite seguir el capítulo incluso en el caso en que el lector sufra carencias formati- vas más o menos importantes. Una lectura detallada permitiría, en este caso, detectar primero y subsanar después estas hipotéticas carencias. La estructura del capítulo es como sigue: comenzaremos introduciendo algo tan simple, y que sin embargo dará tanto juego, a lo largo del texto como son los sistemas de ecuaciones lineales (primera sección). Estudiaremos la eli- minación gaussiana como un método sistemático (algorítmico) para resolver, y estudiar, estos sistemas (segunda sección). Así abordaremos el análisis de 1
Transcript
“MatI” — 2018/3/6 — 12:59 — page 1 — #17
Capítulo 1
Sistemas de EcuacionesLineales. Matrices y suálgebra
This is your last chance. After this, there isno turning back. You take the blue pill - the storyends, you wake up in your bed and believe whateveryou want to believe. You take the red pill - youstay in Wonderland and I show you how deep therabbit-hole goes.
Matrix, hermanas Wachoski, 1999.
Este primer capítulo tiene un marcado carácter introductorio. De formaimplícita se asume que el lector está familiarizado con buena parte de losconceptos básicos (sistemas de ecuaciones lineales, matrices, producto es-calar y norma de vectores, etc) de una asignatura básica de Álgebra. Ellonos permite hacer una exposición más relajada y algo más desordenada. Encualquier caso los resultados se exponen de forma detallada lo que permiteseguir el capítulo incluso en el caso en que el lector sufra carencias formati-vas más o menos importantes. Una lectura detallada permitiría, en este caso,detectar primero y subsanar después estas hipotéticas carencias.
La estructura del capítulo es como sigue: comenzaremos introduciendoalgo tan simple, y que sin embargo dará tanto juego, a lo largo del texto comoson los sistemas de ecuaciones lineales (primera sección). Estudiaremos la eli-minación gaussiana como un método sistemático (algorítmico) para resolver,y estudiar, estos sistemas (segunda sección). Así abordaremos el análisis de
1
“MatI” — 2018/3/6 — 12:59 — page 2 — #18
2 1.1 Sistemas de ecuaciones lineales
la estructura del conjunto de soluciones de un sistema lineal, bajo qué con-diciones existe solución y cuándo ésta es única. Haremos entonces un breveinterludio (sección tercera) donde repasaremos, o trataremos, las operacionesbásicas en Rn. La propia disposición de las ecuaciones en un sistema linealjustificarán la noción de matriz como una tabla ordenada de números, querecoge la información esencial del sistema, así como las operaciones sobre lasmatrices: suma, producto por escalar y producto matricial (sección cuarta).Volveremos a los sistemas de ecuaciones lineales reescribiéndolos como ecua-ciones matriciales y estudiaremos la existencia y unicidad de solución desdeesta óptica (sección quinta). Continuaremos tratando uno de los primerostemas delicados del Álgebra Lineal Matricial: la existencia de inversa de unamatriz (sección sexta). Dejaremos para la última sección la factorización LU .Finalizaremos con unas breves notas históricas y la primera lista de ejerciciosde este texto.
1.1. Sistemas de ecuaciones linealesUna ecuación lineal es una ecuación donde la incógnita o incógnitas apa-
recen combinadas de forma lineal, esto es, sin operaciones más complicadasque el producto por un número (o escalar) y la suma. Por ejemplo
4x + 3 = 0, 2x − y + z
4 = 8, x1 − x2 + 2x3 − 4x4 = 4, (1.1)
son ecuaciones lineales. Se excluyen así ecuaciones del tipo
x + x2 = 5, x + 5y
= 5, exy − 3 = 0, cos x1 − sen x2 + x3x4 = 0. (1.2)
Esto es, las ecuaciones presentadas en (1.2) son no lineales.
Definición 1.1.1: Sistemas de ecuaciones linealesUn sistema de ecuaciones lineales es un conjunto de ecuacioneslineales que se han de verificar simultáneamente.
Ejemplo 1.1.2
Ejemplos de sistemas lineales son los siguientes
�x + y = 4
2x − y = 5
x1 + x2 − x3 = 3x1 + x2 + x3 = 1
2x1 + 3x2 + x3 = 4x2 + x3 = 0
(1.3)
“MatI” — 2018/3/6 — 12:59 — page 3 — #19
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 3
En el primer ejemplo, tenemos dos ecuaciones con dos incógnitas, xe y. En la segunda cuatro ecuaciones con tres incógnitas, x1, x2, x3.Es habitual utilizar como símbolos para representar las variables x,y, z, y quizás s, y t si es necesario. Cuando el número de incógnitascomienza a ser elevado se utilizan subíndices, como x1, x2, . . . , osímbolos similares. En notación estándar, a la derecha del igual no secolocan incógnitas, tan sólo datos (o en algún caso parámetros). Estaparte, la situada a la derecha de las igualdades y que corresponderíaa los datos de un hipotético problema, recibe el nombre de términoindependiente.
Para la resolución de estas ecuaciones existen una serie de métodos yaclásicos. Resumiremos brevemente los más populares y utilizaremos para suexposición el primer ejemplo de (1.3).
Método de sustitución. Se trata de despejar una de las variables enuna ecuación y sustituir el resultado en las demás. El sistema va reduciendoel número de ecuaciones e incógnitas hasta que, en el caso óptimo, quedauna única ecuación lineal que se resuelve. El valor hallado de esta incógnitase utiliza en las ecuaciones anteriores para hallar el resto de valores de lasincógnitas. Por ejemplo,
�x + y = 4
2x − y = 51aEq.⇒ y = 4 − x,
y por tanto, sin más que reemplazar el valor hallado de y en la segundaecuación, deducimos
Una vez conocido el valor de x, basta sustituir en cualquiera de las ecuacionesanteriores, por ejemplo la primera, y concluir que
y = 4 − x = 4 − 3 = 1.
Método de igualación. Se trata de igualar ecuaciones vía una incógnitaintermedia que hace de enlace. De nuevo obtenemos un sistema con unaecuación y una incógnita menos. Procedemos así hasta que el sistema sereduce a una única ecuación. A modo ilustrativo,�
x + y = 42x − y = 5 ⇒
�y = 4 − xy = 2x − 5 ⇒ 4−x = 2x−5 ⇒ x = 3.
“MatI” — 2018/3/6 — 12:59 — page 4 — #20
4 1.2 Método de Gauss y variantes
Como antes, se sigue que y = 1 sin más que reemplazar el valor hallado dex en cualquier de las ecuaciones.
Método de reducción. Consiste en modificar el sistema, alterando susecuaciones, de manera que se mantengan el conjunto de soluciones del mis-mo pero de forma que las variables vayan desapareciendo en las ecuaciones,conforme descendemos en el sistema. Por ejemplo:
�x + y = 4
2x − y = 52aEc.−2×1aEc.⇒
�x + y = 4
− 3y = −3
El sistema de la derecha es distinto, obviamente, pero es fácil comprobarque las soluciones se preservan: las soluciones del segundo sistema lo sondel primero y viceversa. Este nuevo sistema es fácil de resolver: la segundaecuación nos indica sencillamente que y = 1 y sustituyendo en la primera,concluimos que x = 3. �
Existen otros métodos en la literatura, más o menos exóticos y/o útilesen la práctica. Algunos, como el método de Cramer lo veremos más adelante(Capítulo 4). Los métodos iterativos son otra familia interesante de métodosque no son métodos exactos en el sentido de que den con la solución en unnúmero finito de pasos. Estos esquemas construyen una sucesión de aproxi-maciones de la solución hasta que se llega a una que se da por buena. Losmétodos iterativos son muy utilizados, de hecho prácticamente los únicosposibles, en sistemas enormes, sistemas que pueden alcanzar fácilmente losmillones de ecuaciones con sus correspondientes incógnitas. No trataremosestos métodos en este texto.
En cualquier caso, el tercer método que hemos visto, el método de re-ducción será el que trabajemos a lo largo de estos apuntes porque es simpley fácilmente automatizable (y por tanto listo para ser programado en unordenador). Permite además visualizar de forma más simple la estructurade soluciones de un sistema de ecuaciones lineales e incluso, llegado el caso,identificar qué parámetros son necesarios para describir todas las solucionesdel sistema.
1.2. Método de Gauss y variantes1.2.1. Método de Gauss
El método de Gauss, o eliminación gaussiana es de facto la rees-critura mecanizada del método de reducción. La idea, ya vista, consiste en
“MatI” — 2018/3/6 — 12:59 — page 5 — #21
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 5
reducir el sistema original a un sistema distinto con las mismas solucionescon una estructura escalonada cuyo resolución sea más rápida. La primeraparte, la obtención del sistema equivalente, se conoce como eliminacióngaussiana y es la parte fundamental del método.
Definición 1.2.1: Sistemas de ecuaciones linealesequivalentes
Dos sistemas de ecuaciones son equivalentes si comparten las mismassoluciones.
Nótese que es posible que el número de ecuaciones entre dos sistemasequivalentes no coincida. El número de incógnitas, obviamente, sí debe serel mismo.
Visualicemos el método de Gauss con un par de ejemplos antes de escri-birlo de forma algorítmica.
Ejemplo 1.2.2
Consideremos el sistema 3 × 3 (3 ecuaciones y 3 incógnitas) siguiente
x + 2y − z = −32x − y + 2z = 7
−3x + y − 3z = −10(1.4)
El primer paso consiste en eliminar la incógnita x en la segunda ytercera ecuación utilizando la primera. Para ello, restamos la segundaecuación la primera multiplicada por 2 y a la tercera sumamos laprimera multiplicada por 3. Obtenemos así
x + 2y − z = −3− 5y + 4z = 13
7y − 6z = −19(1.5)
Es fácil comprobar que si {x, y, z} son solución del primer sistema,también lo son del segundo. Ahora bien, si tomamos el segundo sis-tema y realizamos las siguientes operaciones: (a) sumar a la segundaecuación la primera multiplicada por 2; (b) restar a la tercera la pri-mera multiplicada por 3, recuperamos el sistema original. El mismoargumento muestra entonces que cualquier solución del segundo siste-ma es solución del primero. Por tanto los sistemas son equivalentes. Enel fondo está la idea de que estas manipulaciones sobre las ecuacionesson fácilmente reversibles con el mismo tipo de operación.
“MatI” — 2018/3/6 — 12:59 — page 6 — #22
6 1.2 Método de Gauss y variantes
Proseguimos con la misma idea en mente. La primera ecuación laaparcamos de momento y eliminamos y de la tercera ecuación suman-do a esta ecuación la segunda multiplicada por 7/5. De esta formallegamos a
x + 2y − z = −3− 5y + 4z = 13
− 25z = −4
5
(1.6)
Este sistema tiene una estructura simple, que definiremos en brevecomo escalonada. Es muy fácilmente resoluble, ascendiendo desde laecuación inferior hacia arriba. Así, la última ecuación dice que z = 2,llevando este valor a la segunda ecuación resolvemos en “y”:
−5y + 8 = 13 ⇒ y = −1.
Por último sustituyendo en la primera los valores hallados para y y zobtenemos
x + 2(−1) − 2 = −3 ⇒ x = 1.
La solución del sistema la escribiremos como la terna de números
(1, −1, 2).
Definición 1.2.3: Sistema de ecuaciones linealesescalonado
Un sistema con m ecuaciones lineales e incógnitas x1, x2 . . . , xn esescalonado si se cumple la siguiente condición: si xj es la primeraincógnita que aparece en la ecuación i−ésima, entonces las incógnitas{x1, . . . , xj} no aparecen en el resto de ecuaciones i + 1, . . . , m.
Ejemplo 1.2.4: Sistemas escalonados
Además del sistema (1.6), los sistemas siguientes son escalonados
2x − z = 1− 3y + 5z = 0
− z = −3
“MatI” — 2018/3/6 — 12:59 — page 7 — #23
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 7
x1 + x2 − x3 + x4 = 1+ 3x2 − x3 + x4 = 2
− 2x3 + x4 = −3+ x4 = 9
3x1 + x2 − x3 + 2x4 = 1− x3 − x4 = 4
+ 3x4 = −3
Observemos que los elementos de la diagonal de (1.6) son los que hanmarcado cómo se han realizado las operaciones. Estos coeficientes jugaranun papel importante en éste y en posteriores capítulos por lo que recibiránsu propio nombre:
Definición 1.2.5: PivotesLos pivotes de un sistema de ecuaciones lineales escalonado son elprimer coeficiente no nulo de cada ecuación.
Ejemplo 1.2.6
Hemos marcado del Ejemplo 1.2.2 anterior, concretamente de (1.6),los pivotes:
1x + 2y − z = −3−5y + 4z = 13
−25z = −4
5
esto es, 1, −5 y −25 .
Si bien han sido ya mencionadas, enunciaremos a continuación, explícita-mente, las tres operaciones que modifican un sistema preservando el conjuntode sus soluciones. Esto es, dan lugar a un sistema equivalente:
Definición 1.2.7: Operaciones elementales (sobresistemas de ecuaciones lineales)
Se denominan operaciones elementales a las siguientes manipula-ciones sobre un sistema de ecuaciones lineales:
1. Cambiar (permutar) dos ecuaciones de orden.
2. Multiplicar una ecuación por un número distinto de cero.
“MatI” — 2018/3/6 — 12:59 — page 8 — #24
8 1.2 Método de Gauss y variantes
3. Sumar a una ecuación otra multiplicada por un número real.
Obviamente uno puede sumar a una ecuación otra multiplicada por ceropues supone de facto no hacer nada. Lo que sí se excluye es multiplicar unaecuación por cero pues supone de facto eliminar la ecuación del sistema ycon ella toda la información que pueda contener.
Podríamos añadir alguna operación fundamental más. Por ejemplo, eli-minar ecuaciones nulas o ya repetidas. No lo haremos porque estamos in-teresados en preservar el tamaño del sistema y esta operación no lo hace.
Teorema 1.2.8Las operaciones elementales dan lugar a sistemas equivalentes.
Demostración. La dejamos como ejercicio. Los argumentos están yaesbozados en la discusión del Ejemplo 1.2.4.
La eliminación gaussiana, estrictamente, utiliza sólo la tercera operaciónelemental y puede ser escrita en forma pseudo-algorítmica como se presentaen el Algoritmo 1.
Entrada: Sistema lineal con m ecuaciones y n incógnitas1 Para i = 1, 2, . . . , m − 1 hacer2 Para j = i + 1, . . . , m hacer3 Restar a la ecuación j-ésima la i-ésima multiplicada
por un factor de forma que se elimine la incógnita i4 Fin5 Fin
Salida: Sistema escalonadoAlgoritmo 1: Eliminación gaussiana escrita en forma (casi) al-gorítmica
Las operaciones son mecánicas y simples, nada más complicado que su-mas (y restas) y productos (y divisiones). Son una serie de reglas susceptiblesde ser aplicadas sin mediar pensamiento creativo/interpretativo alguno. Es-te aspecto es sumamente positivo pues acerca, y mucho, el método a suimplementación en un ordenador1.
1Un ordenador no piensa, calcula. Cierto que a unas velocidades muy superiores a la
“MatI” — 2018/3/6 — 12:59 — page 9 — #25
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 9
La primera ecuación no se utilizará hasta la fase final de resolucióndel sistema. Sumando a la tercera ecuación la segunda multiplicadapor −1/5 y sumando a la cuarta la segunda multiplicada por 4/5eliminamos x2 de esas ecuaciones. El nuevo sistema nos queda comosigue
x1 + 2x2 + x3 + x4 = −1
− 5x2 + x3 − 3x4 = 13
− 15x3 + 3
5x4 = −85
− 15x3 + 3
5x4 = −85
La tercera ecuación queda fijada y la utilizamos para eliminar x3 enla cuarta de forma que llegamos a
x1 + 2x2 + x3 + x4 = −1
− 5x2 + x3 − 3x4 = 13
− 15x3 + 3
5x4 = −85
0x1 + 0x2 + 0x3 + 0x4 = 0
La última ecuación es 0 = 0, una obviedad, una tautología. Compro-bamos así que el sistema original es equivalente a un sistema de tres
capacidad humana, pero sin aportar pensamiento original o deductivo alguno. Describir elmétodo para resolver un problema de forma que no requiera interpretación del mismo esel primer paso antes de escribir código en un ordenador. Estas recetas es lo que se conocecomo algoritmos (no confundir con “logaritmos”).
“MatI” — 2018/3/6 — 12:59 — page 10 — #26
10 1.2 Método de Gauss y variantes
ecuaciones con cuatro incógnitas. Podemos tomar x4 como paráme-tro libre, se le puede asignar cualquier valor, y escribir el resto deincógnitas en función de ésta. De esta manera,
x3 = 3x4 + 8
y a partir de ahí, volviendo hacia atrás, concluimos
x2 = −1, x1 = −7 − 4x4.
El sistema tiene en consecuencia infinitas soluciones, una para cadavalor de x4. En este sentido, x4 funciona como un parámetro des-criptivo, permite escribir de forma concisa todas y cada una de lasinfinitas soluciones del sistema.
Escribiremos las soluciones como sigue
{(−7 − 4x4, −1, 8 + 3x4, x4) : x4 ∈ R}. (1.7)
Las expresión anterior está escrita en notación de lenguaje de conjun-tos. Se lee en la siguiente forma: las soluciones son un conjunto de4-tuplas (una lista de cuatro números, un valor para cada incógnita)cuya expresión depende de un parámetro x4 que puede ser cualquiernúmero reala.
aObserva que el lenguaje utilizado en (1.7) es universal y trasciendo el idiomadel texto que lo pueda acompañar.
Ejemplo 1.2.10
Consideramos esta simple variación del ejemplo anterior donde sólohemos modificado el término independiente:
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 11
Procedamos como antes y llegaremos al sistema
x1 + 2x2 + x3 + x4 = 1
− 5x2 + x3 − 3x4 = 1
− 15x3 + 3
5x4 = 95
0x1 + 0x2 + 0x3 + 0x4 = 2
La última ecuación afirma, literalmente,
0 = 2
lo que es obviamente imposible. En otras palabras, el sistema no tienesolución.
Una vez concluida la fase de eliminación gaussiana es fácil dilucidar deun simple vistazo si el sistema de ecuaciones lineales tiene solución única,tiene infinitas soluciones o no tiene solución. De hecho, éstos son todos loscasos posibles. Concretamente,
(a) si el sistema, una vez escalonado, tiene una ecuación imposible, deltipo 0 = 2 que hemos visto en el ejemplo anterior, el sistema no tienesoluciones. Esto es, estamos ante un sistema incompatible.
(b) En caso contrario, el sistema es compatible, admite soluciones. Faltapor verificar si la solución es única o no. Para ello se descartan primerolas ecuaciones triviales, del tipo “0=0”, y posteriormente se examinael sistema resultante:
(b.1) si el sistema final tiene el mismo número de ecuaciones que deincógnitas (una vez eliminadas las ecuaciones nulas) estamos anteun sistema con una única solución, lo que se denomina sistemacompatible determinado;
(b.2) si el sistema final tiene más ecuaciones que incógnitas, tenemosun sistema con infinitas soluciones que pueden ser descritas enfunción de uno o más parámetros. En otras palabras, tenemos unsistema compatible indeterminado.
Obviamente, podríamos plantearnos aplicar las operaciones elementalesde forma distinta, quizás para trabajar con números más manejables.
“MatI” — 2018/3/6 — 12:59 — page 12 — #28
12 1.2 Método de Gauss y variantes
Ejemplo 1.2.11
Si sobre el sistema�
2x1 + x2 = 13x1 − 2x2 = 5
procedemos como hasta ahora hemos descrito (sumar a la segundaecuación la primera multiplicada por −3/2) llegaríamos a
� 2x1 + x2 = 1
− 72x2 = 7
2
Podemos operar de forma distinta, por ejemplo multiplicando la se-gunda ecuación por 2 y luego sumar a la segunda a la primera multi-plicada −3 para llegar al sistema
�2x1 + x2 = 1
− 7x2 = 7
En cualquier caso hay que tener en cuenta que para un ordenador, ladiferencia entre los números reales 7 y 7/2 sencillamente no existe. Asíque aunque nosotros, en ocasiones, hagamos este tipo de simplificacio-nes en cálculos a mano, no es necesario considerarlas en un lenguajede programación. Es más, computacionalmente, no es recomendable.
Apliquemos el método de Gauss como hasta ahora: a la segunda ecuación lesumamos la primera, a la tercera, le restamos dos veces la primera ecuacióny a la cuarta y última ecuación le restamos la primera. Obtenemos así el
“MatI” — 2018/3/6 — 12:59 — page 13 — #29
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 13
sistema equivalente
x1 + 2x2 + 2x3 + x4 = 0+ x4 = −1
+ x2 + 2x3 + x4 = 0− x2 − 2x3 − x4 = 0
El método de Gauss tal y como hasta ahora lo hemos presentado no puedecontinuar dado que con la segunda ecuación es imposible eliminar las va-riables x2 en la tercera y cuarta ecuación. Esto es, la segunda ecuación nopresenta un pivote en x2. La forma de solventar este problema debería pare-cer a estas alturas obvia: basta con mover, permutar, la ecuación tercera ocuarta a la segunda posición y continuar el proceso. Por ejemplo, intercam-biando las ecuaciones segunda y tercera tenemos el sistema equivalente
x1 + 2x2 + 2x3 + x4 = 0+ x2 + 2x3 + x4 = 0
+ x4 = −1− x2 − 2x3 − x4 = 0
que permite continuar con el método: sumamos a la cuarta ecuación la se-gunda para obtener
x1 + 2x2 + 2x3 + x4 = 0+ x2 + 2x3 + x4 = 0
+ x4 = −10x1 + 0x2 + 0x3 + 0x4 = 0
El sistema es compatible (la cuarta ecuación es una ecuación nula que sepuede eliminar o ignorar) e indeterminado. Las soluciones son2
x4 = −1, x2 = 1 − 2x3, x1 = −1 + 2x3, ∀x3 ∈ R
o, en lenguaje de conjuntos,
{(−1 + 2x3, 1 − 2x3, x3, −1) : x3 ∈ R}.
En situaciones más o menos realistas encontrarse con un pivote nulo, quedemande una permutación para poder continuar con el método de Gauss, esaltamente improbable. Sin embargo sí puede suceder que el pivote sea muy
2“∀” es un símbolo que significa “para todo”, o “para cualquier”. Por tanto la expresiónsiguiente se lee como sigue “para todo escalar x3, son solución del sistema x4 = −1,x2 = 1 − 2x3 y x1 = −1 + 2x3.”
“MatI” — 2018/3/6 — 12:59 — page 14 — #30
14 1.2 Método de Gauss y variantes
pequeño comparado con el resto de elementos de la matriz. Esto introduceproblemas en la operaciones numéricas, grosso modo se vuelven inestablespor un efecto de redondeo. Este fenómeno se mitiga, en buena medida, per-mutando siempre las ecuaciones de forma que el pivote sea siempre el mayoren valor absoluto posible. El método se conoce entonces como “método deGauss, o eliminación gaussiana, con pivotaje parcial”. No entraremos en estosdetalles que forman parte de los aspectos básicos del Álgebra Computacional(véase el comentario final en este capítulo).
Entrada: Sistema lineal con m ecuaciones y n incógnitas1 Hacer k = 0, r = 1;2 Mientras no todas las ecuaciones k + 1 . . . , m sean nulas
hacer3 Hacer k = k + 1;4 Buscar entre las ecuaciones j ∈ {k, . . . m} la primera que
contenga un coeficiente �= 0 para la primera variableposible xs ∈ {xr, . . . , xn};
5 Hacer r = s ; // xs en ecuación r contiene el pivote6 Intercambiar ecuaciones k y j;7 Para j = k + 1, . . . , m hacer8 Restar a la ecuación j-ésima la k-ésima multiplicada
por un factor de forma que se elimine la incógnita xr
9 Fin10 Fin
// Existen k ecuaciones no nulasSalida: Sistema escalonado
Algoritmo 2: Eliminación gaussiana con pivotaje escrita en for-ma (casi) algorítmica
Nota 1.2.12: Elección de parámetros en un sistemacompatible indeterminado
Observa que el parámetro libre con el que se describen la solucionesdel sistema (1.8) es x3. Una forma simple parar saber qué paráme-tro o parámetros han de tomarse para escribir las soluciones de unsistema compatible indeterminado es elegir las variables que corres-ponden a las incógnitas que no tienen pivote. Así, en el ejemploanterior los pivotes aparecen para las incógnitas x1, x2 y x4 dejando
“MatI” — 2018/3/6 — 12:59 — page 15 — #31
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 15
en consecuencia, x3 como parámetro. Volveremos a tocar este puntomás adelante.
Resolución del sistema escalonado
Aunque ya lo hemos aplicado, no está de más a estas alturas escribir lasolución del sistema escalonado en forma pseudo-algorítmica tal y como sese expone en el Algoritmo 3.
Entrada: Sistema escalonado con m ecuaciones lineales y nincógnitas
1 Identificar las incógnitas que no tienen pivote asociado.Pasan a ser parámetros de las soluciones;
2 Identificar k la última ecuación no nula;3 Para i = k, k − 1, . . . , 1 hacer4 Identificar xr la incógnita asociada al pivote de la
ecuación k−ésima;5 Despejar xr en función de las demás incógnitas y/o
parámetros {xr+1, . . . , xn}6 Fin
Salida: Soluciones x1,. . . , xn
Algoritmo 3: Resolución del sistema escalonado en forma (casi)algorítmica
Nota 1.2.13Hemos utilizado los términos pseudoalgorítmico o casi-algorítmico por-que el lenguaje utilizado en la descripción de los algoritmos requieretodavía de cierta interpretación. Más adelante enunciaremos algorit-mos más próximos a un lenguaje computacional, que a lo hora de suaplicación no precisan de interpretación alguna por parte del usuario.
1.2.3. Método de Gauss-JordanEl método de Gauss-Jordan es, podría decirse, una vuelta de tuerca a
la eliminación gaussiana. De nuevo la forma más simple es exponerlo con
“MatI” — 2018/3/6 — 12:59 — page 16 — #32
16 1.2 Método de Gauss y variantes
un ejemplo del que será fácil extrapolar el método. Tomemos para ello elsistema visto en el Ejemplo 1.2.2
x + 2y − z = −32x − y + 2z = 7
−3x + y − 3z = −10
La eliminación gaussiana nos condujo al sistema equivalente
x + 2y − z = −3− 5y + 4z = 13
− 25z = −4
5
La idea es continuar con estas operaciones elementales pero ahora de abajohacia arriba y normalizar los pivotes. Así podemos multiplicar las ecuacionessegunda y tercera por −1/5 y −5/2
x + 2y − z = −3y − 4
5z = −135
z = 2
para tener todos los pivotes igual a 1. Seguidamente, sumamos a la segundaecuación la tercera multiplica por 4/5 y a la primera ecuación, la tercera:
x + 2y = −1y = −1
z = 2
Restamos finalmente a la primera ecuación la segunda multiplicada por 2.El sistema que obtenemos es
x = 1y = −1
z = 2
que es resoluble trivialmente.
“MatI” — 2018/3/6 — 12:59 — page 17 — #33
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 17
2x2 − x3 = 4(segunda ecuación menos dos veces la primera, tercera ecuación menosla primera), y a continuación la segunda ecuación es sumada a latercera y restada a la cuarta de forma que llegamos al sistema
Observa que podríamos eliminar la última ecuación. Podríamos asi-mismo resolver el sistema por sustitución regresiva. Así, los pivotes(1, 2 y −3 en las columnas 1,2 y 4) indican que el sistema es compa-tible indeterminado. Las soluciones se pueden escribir en función delas incógnitas x3 y x5, puesto que son la tercera y quinta variables lasque no tienen pivotes.
Procedamos, no obstante, con el método de Gauss-Jordan. En talcaso, dividimos la ecuación segunda por 2 y la tercera por −3:
x1 + x2 − x3 + x4 + x5 = 6+ x2 − 1
2x3 − 32x4 − 3
2x5 = −52
x4 + x5 = 30x1 + 0x2 + 0x3 + 0x4 + 0x5 = 0
“MatI” — 2018/3/6 — 12:59 — page 18 — #34
18 1.2 Método de Gauss y variantes
La tercera ecuación es sumada a la segunda, multiplicada por 3/2, yrestada a la primera
x1 + x2 − x3 = 3+ x2 − 1
2x3 = 2x4 + x5 = 2
0x1 + 0x2 + 0x3 + 0x4 + 0x5 = 0
Seguidamente restamos la ecuación segunda a la primera y obtenemos
x1 + − 12x3 = 1
+ x2 − 12x3 = 2
x4 + x5 = 30x1 + 0x2 + 0x3 + 0x4 + 0x5 = 0
Tenemos un sistema de ecuaciones superreducido en el siguiente senti-do: los pivotes son uno y las columnas que contienen el pivote tienenel resto de elementos nulos. Las soluciones del sistema son fácilmentecalculables:
x1 = 1 + 12x3, x2 = 2 + 1
2x3, x4 = 3 − x5, ∀x3, x5 ∈ R
o bien��
1 + 12x3, 2 + 1
2x3, x3, 3 − x5, x5�
: x3, x5 ∈ R�
.
Nótese que podríamos reemplazar x3 y x5 por, digamos, 2a y b, con a,b cualquier par arbitrario de números reales. Las soluciones se puedendescribir de una forma ligeramente más sencilla
x1 = 1+a, x2 = 2+a, x3 = 2a, x4 = 3−b, x5 = b ∀a, b ∈ R,
o equivalentemente�(1 + a, 2 + a, 2a, 3 − b, b) : a, b ∈ R
�.
El método de Gauss-Jordan tiene por tanto como objetivo llevar el sis-tema a una forma reducida muy simple, donde los pivotes son unos y lasincógnitas que tienen pivote aparecen en una única ecuación, precisamente
“MatI” — 2018/3/6 — 12:59 — page 19 — #35
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 19
la ecuación de la que son pivote. Estos sistemas reciben el nombre de siste-mas escalonados reducidos, y son sin duda la forma reducida más simpleposible. El método se describe, algorítmicamente en el Algoritmo 4. Omiti-remos detallar el algoritmo de cómo hallar las soluciones una vez llegado ala forma final del método de Gauss-Jordan por su simplicidad3.
Nota 1.2.15: El coste computacional del método deGauss y el método de Gauss-Jordan
A primera vista el método de Gauss-Jordan parece preferible al méto-do de Gauss. Sin embargo, no es habitual utilizarlo tanto en cuentasa mano como en una implementación en un ordenador. La razón esque en realidad requiere de más operaciones, luego más trabajo.
Supongamos un sistema cuadrado, por simplicidad, con n ecuacio-nes y n incógnitas. El número de multiplicaciones que han de realizar-se para reducirlo a una forma escalonada, primera fase del método deGauss es O(n3/3) (y otras tantas sumas)a. Por contra, resolver el sis-tema triangular, segunda fase del método, utiliza O(n2/2) productos.Esto quiere decir que la primera fase es con mucho la más costosa,y que requiere 2n/3 veces, aproximadamente, más operaciones que lasegunda. El método de Gauss-Jordan hace uso en su primera fase deO(2n3/3) operaciones, el doble que la eliminación gaussiana, comoera de esperar, costo extra que no compensa la resolución trivial delsistema reducido. De hecho en sistemas de un tamaño moderado es eldoble de costoso que el método de Gauss. Hay sin embargo un casoen que el método de Gauss-Jordan puede ser competitivo: cuando sedesean resolver múltiples sistemas de ecuaciones con los mismos coefi-cientes y diferentes términos independientes. Volveremos a este temaal final del presente capítulo cuando tratemos el cálculo de inversa dematrices.
aEsto es, el número de productos es n3/3 + αn2 + βn + γ con α, β, γ númerosapropiados. Dado que cuando n crece, el término que domina en la expresiónanterior es n3/3, el resto de términos puede obviarse sin que suponga una pérdidade información relevante.
3Se deja como ejercicio
“MatI” — 2018/3/6 — 12:59 — page 20 — #36
20 1.2 Método de Gauss y variantes
Entrada: Sistema lineal con m ecuaciones y n incógnitas1 Hacer k = 0, r = 1;2 Mientras no todas las ecuaciones k + 1 . . . , m sean nulas hacer3 Hacer k = k + 1;4 Buscar entre las ecuaciones j ∈ {k + 1, . . . m} la primera que
contenga un coeficiente �= 0 para la primera variable posiblexs ∈ {xr, . . . , xn};
5 Hacer r = s;6 Intercambiar ecuaciones k y j;7 Para j = k + 1, . . . , m hacer8 Restar a la ecuación j-ésima la k-ésima multiplicada por
un factor de forma que se elimine la incógnita r−ésima9 Fin
10 Hacer r = r + 1;11 Fin
// Existen k ecuaciones no nulas12 Para i = 1, . . . , k hacer13 Dividir la ecuación i-ésima por el pivote de dicha ecuación14 Fin15 Para i = k, k − 1, . . . , 2 hacer16 Identificar la variable xr asociada al pivote de la ecuación
i−ésima;17 Para j = 1, . . . , i − 1 hacer18 Restar a la ecuación j-ésima la i-ésima multiplicada por
un factor tal de forma que se elimine la incógnita xr
19 Fin20 Fin
Salida: Sistema lineal en la forma escalonada del Método deGauss-Jordan
Algoritmo 4: Reducción de un sistema de ecuaciones lineales a suforma escalonada reducida con posible pivotaje escrita en forma (casi)algorítmica
“MatI” — 2018/3/6 — 12:59 — page 21 — #37
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 21
1.3. Un breve interludio: vectores en Rn
1.3.1. IntroducciónEn esta sección repasaremos someramente las nociones de vectores, sus
operaciones elementales, la norma y el producto escalar euclídeo. La ideaes hacerlo de forma breve pero incidiendo en aspectos que, aunque seanmuy probablemente conocidos, no se hayan podido considerar con toda laprofundidad que se merecen.
Si bien toda la sección está formulada en Rn, mínimos cambios, igualmen-te señalados en el texto, extienden estas ideas a vectores con componentesen los números complejos. Esto es, Cn.
1.3.2. Primeras definicionesLos vectores son simples listas de números, en principio, compuestos de
números reales. Por ejemplo
(1, 2), (1, 2, 3), (0, −1, 0, 1) . . .
son vectores de dos, tres y cuatro componentes.Denotaremos4
R3 := {(x1, x2, x3) : x1, x2, x3 ∈ R},
al conjunto de vectores de tres componentes o vectores en el espacio. Esconocido que cualquier vector en R3 se puede identificar con un punto en elespacio, vía sus coordenadas cartesianas. De forma similar,
R2 := {(x1, x2) : x1, x2 ∈ R}
se identifica con puntos en el plano.Otra interpretación igualmente válida de un vector, en R2 o R3, es la de
un segmento orientado: señala un desplazamiento en línea recta que por tantoademás de longitud, tiene dirección y sentido. En este caso los vectores seconsideran, libres, es decir el punto inicial no está fijado y se puede desplazarlibremente por el plano/espacio.
En general, tenemos
4En este texto distinguiremos entre los símbolos “A = B��, “A y B son iguales”, y“A := B”, “se define A como B”. Aunque no es una notación estándar, muchos matemáticosutilizan “=” indistintamente para ambos fines mientras que una minoría utiliza “≡” parala segunda tarea, el símbolo “:=” tiene la ventaja evidente de separar el símbolo de ladefinición que se le asigna.
“MatI” — 2018/3/6 — 12:59 — page 22 — #38
22 1.3 Un breve interludio: vectores en Rn
1
2
3
−1
−2
−3
1 2 3 4−1−2−3−4
� (2,1)
Figura 1.1: El vector (2, 1) visualizado bien como las coordenadas de unpunto, bien como un segmento orientado que se puede mover libremente enel plano
Definición 1.3.1: Rn
Rn es una lista de n números, n−tupla en el argot habitual,
Para representar un vector en Rn utilizaremos símbolos en negrita talescomo u, v, x, mientras que sus componentes se denotarán5 por ui, vj , etc.
Sobre los vectores se definen dos primeras operaciones: la suma de vec-tores y el producto por escalar:
Definición 1.3.2: Suma de vectores y productopor escalar
Suma: dados u, v ∈ Rn,
u + v = (u1 + v1, u2 + v2, . . . , un + vn) ∈ Rn.
Producto por escalar: para u ∈ Rn, λ ∈ R
λu = (λu1, λu2, . . . , λun) ∈ Rn.
5Otras notaciones utilizadas son �u o u˜, la segunda especialmente en pizarra por lo difícil
que puede resultar reforzar el trazo (negrita) con una tiza.
“MatI” — 2018/3/6 — 12:59 — page 23 — #39
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 23
u
v
u+ v
u
2u
-u
Figura 1.2: Suma de vectores y producto por escalar
Ejemplo 1.3.3
Dados u = (1, 0, −1, 0), v = (1, 2, −2, −1),
u + v = (2, 2, −3, −1), 4u = (4, 0, −4, 0).
En R2 o R3 tenemos nuevamente interpretación geométrica. La sumaes el desplazamiento resultado de los vectores sumados. También esposible interpretarlo como la diagonal de un paralelogramo cuyos doslados adyacentes vienen dados por los vectores sumados. El productopor un escalar λ es simplemente una dilatación, preserva dirección,pero cambia el sentido si λ negativo, dado por el número real |λ|
Estas operaciones cumplen las siguientes propiedades.
Propiedades 1.3.4
La suma de vectores y el producto por escalar satisfacen las siguientespropiedades: para todo u, v ∈ Rn, λ, µ ∈ R,
(a) Asociatividad de la suma: (u + v) + w = u + (v + w).
(b) Conmutatividad: u + v = v + u.
(c) Elemento neutro de la suma: u + 0 = u, donde 0 = (0, 0, . . . , 0).
(d) Elemento opuesto de la suma: u + (−u) = 0 (hemos definido−u = −1 u).
(e) Distributividad respecto a la suma de vectores: λ(u+v) = λu+λv.
“MatI” — 2018/3/6 — 12:59 — page 24 — #40
24 1.3 Un breve interludio: vectores en Rn
(f) Distributividad respecto a la suma de escalares: (λ + µ)u =λu + µu.
(g) Asociatividad del producto por escalar: (λµ)u = λ(µu)
(h) Elemento neutro del producto: 1u = u.
Nota 1.3.5La propiedad asociativa afirma que la suma se puede efectuar en elorden que se desee. La conmutatividad, que el orden de sumandos noes relevante en el resultado. La tercera y cuarta propiedad muestranque hay un vector que no hace nada, el vector nulo, y que se puedeobtener sumándole a un vector, su vector opuesto (ambos, el vectornulo y el opuesto a uno dado son necesariamente únicos). Con la aso-ciatividad del producto manifestamos que el resultado de multiplicardos escalares y luego el vector coincide con multiplicar el vector porcada uno de los escalares. Finalmente, que el producto por “1” dejael vector invariante.
Son propiedades muy simples, que se utilizan habitualmente sinprestar mayor atención y que pueden parecer resultado de una ob-sesión por listar propiedades evidentes. No obstante esconden ciertasparticularidades que un examen más profundo requiere reconsiderar.Por un lado, aparecerán en ámbitos más generales y buena parte de re-sultados no tan elementales dependen únicamente de que se cumplanestas propiedades básicas, y por tanto son extrapolables a construc-ciones más complicadas. Por otro lado, estas propiedades no siempreson ciertas en lo que podríamos llamar el mundo real. Por ejemplo, sise consideran las implementaciones de estas operaciones elementales,suma y producto, en un ordenador resulta que la suma es conmutati-va pero no asociativa. La propiedad distributiva tampoco se cumple.Ello es debido a que cualquier operación con números reales en unordenador trabaja con precisión finita, un número máximo de cifras,por lo que siempre lleva pareja una pérdida de información por elredondeo. Éste es el primer paso hacia una área nueva, la aritméticacomputacional, tema nada baladí que no trataremos.
Para cualquier vector u ∈ Rn, se puede introducir la norma como lalongitud del vector:
“MatI” — 2018/3/6 — 12:59 — page 25 — #41
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 25
Definición 1.3.6: Norma (euclídea)
Se define la norma euclídea o simplemente norma de un vector enRn a la cantidad
�u� :=�
u21 + u2
2 + . . . + u2n. (1.9)
Obviamente, cuando hablamos de longitud debemos limitarnos, en prin-cipio, a n = 2, 3 y el resultado es una consecuencia del teorema de Pitágoras6.
Una norma no sólo proporciona la (¿una?) forma de medir el tamaño olongitud de un vector si no que además ofrece una forma simple de medir ladistancia entre dos vectores u, v (o los puntos a lo que apuntan) mediante
d(u, v) := �u − v� =�
(u1 − v1)2 + (u2 − v2)2 + · · · + (un − vn)2
que corresponde, para n = 2, 3, a la forma natural (distancia euclídea).
Propiedades 1.3.7: Norma
(N1) Positividad: �u� ≥ 0 y �u� = 0 si y sólo si u = (0, . . . , 0).
(N2) Homogeneidad: �λu� = |λ|�u�.
(N3) Desigualdad triangular �u + v� ≤ �u� + �v�.
u
v
u+ v
a
b
c
Figura 1.3: Desigualdad triangular: c ≥ a + b, para cualquier triángulo delados a, b, c.
La tercera propiedad es consecuencia de que en cualquier triángulo, verFigura 1.3, la longitud de uno de los lados es siempre menor o igual quela suma de las longitudes de los otros dos7. De hecho, el único caso enque la desigualdad se transforma en una igualdad surge cuando los vectores
6Se deja como ejercicio. Inmediato en R2 sólo ligeramente más complicado en R3.7Dicho de otra manera, que si quieres ir de A a B mejor no pases antes por un tercer
punto C
“MatI” — 2018/3/6 — 12:59 — page 26 — #42
26 1.3 Un breve interludio: vectores en Rn
comparten dirección y sentido y el triángulo es, en consecuencia, degenerado.La desigualdad triangular es fácil de probar geométricamente, por tanto enR2 o R3, pero no tan inmediato en Rn. Una demostración de esta desigualdadpara cualquier n, y por tanto no basado en argumentos geométricos, habráde esperar un poco (Corolario 1.3.14)
Nota 1.3.8: Otras normasCualquier forma de medir el tamaño que cumpla las propiedades lis-tadas en las Propiedades 1.3.7 recibe el nombre genérico de norma.Otros ejemplos son
A la norma definida en (1.9) se le llama norma euclídea y se sueledenotar por �u�2. Las normas �u�1 y �u�∞ son conocidas como “nor-ma uno” y “norma uniforme” (o “norma infinito”) mientras que �u�p
para p ≥ 1 es, en buena lógica, la “norma p”.aLa verificación de estas propiedades se deja como ejercicio.
u
v
u− v
θ
Figura 1.4: Teorema de los Cosenos
Volvamos al caso n = 2, al plano. El Teorema de los Cosenos aplicado altriángulo dibujado por u, v y u − v implica que
�u − v�2 = �u�2 + �v�2 − 2�u��v� cos θ
“MatI” — 2018/3/6 — 12:59 — page 27 — #43
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 27
donde θ es el ángulo que forman los vectores u y v (ver Figura 1.4). Entonces
(u1 − v1)2 + (u2 − v2)2 = u21 + u2
2 + v21 + v2
2 − 2�u��v� cos θ, (1.10)
Desarrollando los cuadrados, y simplificando adecuadamente damos con lasiguiente expresión
u1v1 + u2v2 = �u��v� cos θ,
que nos descubre el producto escalar habitual en Rn:
Definición 1.3.9: Producto escalarEl producto escalar de dos vectores u, v ∈ Rn es el número realque viene dado por
u · v := u1v1 + u2v2 + . . . + unvn =n�
i=1uivi.
Nota 1.3.10El símbolo “�” es el sumatorio, y debe leerse como sigue: indica quese suma unas expresiones que dependen de una variable que toma losvalores comprendidos entre el valor inferior y el valor superior. Porejemplo,
3�
j=0(2j + 1)2
es una forma de representar 1 + 9 + 25 + 49. El papel de la variable“j” es irrelevante dado que podríamos escribir la misma suma con
3�
r=0(2r + 1)2. De ahí que a este índice en el sumatorio se le llame en
ocasiones índice o variable muda.
Ejemplo 1.3.11
Por ejemplo, u = (1, 2, 0, −1), v = (−1, 1, 0, 3), w = (1, 1, 1, 3) enton-ces
u · v = −1 + 2 − 3 = −2, u · w = 1 + 2 + 0 − 3 = 0.
El mismo argumento que en R2 nos condujo al producto escalar funcionaen R3. Así, podemos ver que el producto escalar de dos vectores es igual alproducto de sus normas por el coseno del ángulo que forman. En consecuencia
“MatI” — 2018/3/6 — 12:59 — page 28 — #44
28 1.3 Un breve interludio: vectores en Rn
el producto es cero si y sólo si uno de los vectores es el vector nulo o losvectores son perpendiculares. En la jerga habitual, diremos en este últimocaso que los vectores son ortogonales.
Propiedades 1.3.12: Producto escalar
(E1) Conmutatividad: u · v = v · u.
(E2) Linealidad u · (v + w) = u · v + v · w, u · (λv) = λ(u · v)
(E3) Definida positiva u · u ≥ 0 y u · u = 0 si y sólo si u = 0.
Observa que con esta definición
�u� =√
u · u. (1.11)
En la terminología habitual se dice que el producto escalar define unaforma forma bilineal (E2), conmutativa (E1) que es definida positiva(E3).
Aunque simples, (E1)-(E3) esconden consecuencias muchas más profun-das de lo que pudiera parecer a primera vista. De hecho veremos adelanteque cualquier operación que satisfaga estas propiedades definirá un productoescalar. Como en el caso de la norma, buena parte de los resultados ligadosal (o un) producto escalar son, en última instancia, consecuencia únicamentede estas tres propiedades. Por ejemplo, la desigualdad de Cauchy-Schwarz,que hemos mostrado cierta para n = 2 y n = 3 vía argumentos geométricos,se deduce de estas tres propiedades en el caso general.
Proposicion 1.3.13: Desigualdad de Cauchy-Schwarz
Se cumple|u · v| ≤ �u��v� (1.12)
y además|u · v| = �u��v� ⇔ u = λv (1.13)
para algún λ ∈ R.
Demostración. Si u o v es el vector nulo, no hay nada que probar.En otro caso, tomemos t > 0 que fijaremos posteriormente. Entonces
0 ≤ �u − tv�2 = (u − tv) · (u − tv) (1.14)= �u�2 + t2�v�2 − 2tu · v
“MatI” — 2018/3/6 — 12:59 — page 29 — #45
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 29
(hemos aplicado (1.11) y (E1)-(E3) de las Propiedades 1.3.12). Portanto
u · v ≤ 12t
�u�2 + t
2�v�2. (1.15)
Si tomamos t = �u�/�v� la desigualdad superior implica
u · v ≤ �v�2�u��u�2 + �u�
2�v��v�2 = �u��v�.
Si rehacemos las operaciones anteriores con −u en lugar de u llegare-mos a
−u · v ≤ � − u��v� = �u��v�o equivalentemente
u · v ≥ −�u��v�. (1.16)
Las desigualdades (1.15) y (1.16) implican (1.12)a.Finalmente es fácil comprobar que la única forma de obtener la
igualdad es empezar en (1.14) también con una igualdad, y por tantoque u = ±tv con t apropiado. De esta forma
|u · v| = �u��v�.
aHemos probado que −a ≤ b ≤ a, que es equivalente a |b| ≤ a.
Hemos empezado derivando el producto escalar de la norma de un vector.Se puede hacer el camino contrario, el más común en los libros de texto. Estoes, definir primero el producto escalar y luego la norma como la raíz cuadradadel producto escalar de un vector por sí mismo:
�u� :=√
u · u.
La desigualdad triangular, cuya demostración estaba pendiente para n ≥ 4,es consecuencia de la desigualdad de Cauchy-Schwarz.
Corolario 1.3.14Para cualquier par de vectores u, v ∈ Rn
�u + v� ≤ �u� + �v�.
Demostración. Partimos de (1.11). Entonces
�u + v�2 = (u + v) · (u + v) = u · u + v · v + 2u · v
“MatI” — 2018/3/6 — 12:59 — page 30 — #46
30 1.3 Un breve interludio: vectores en Rn
≤ �u�2 + �v�2 + 2�u��v�
donde hemos hecho uso de la la linealidad y la conmutatividad delproducto escalar ((E1) y (E2) en Propiedades 1.3.12) y la desigualdadde Cauchy-Schwarz (Proposición 1.3.13). Como
�u + v�2 ≤ �u�2 + �v�2 + 2�u��v� =��u� + �v��2
,
el resultado queda probado.
Finalizaremos con un par de notas sobre la generalización del productoescalar en otros ámbitos.
Nota 1.3.15: Espacios vectoriales en C
Se puede definir los espacios
Cn =�(z1, . . . , zn) : z1, . . . , zn ∈ C
�
de forma similar. La suma y resta de vectores es exactamente igual queen Rn. El producto escalar requiere conjugar uno de los vectores antesde aplicar el producto escalar real. Así podemos definir el productoescalar en Cn como
z · w = z1w1 + z2w2 + . . . + znwn.
Observa que de esta forma recuperamos (1.11)
�z�2 = |z1|2 + |z2|2 + . . . + |zn|2 = z · z ≥ 0
(|zi| es el módulo del número complejo zi) y en particular la condiciónde definida positiva (E3) en Propiedades 1.3.12. Debemos renunciar ala propiedad conmutativa (E1) (nuevamente en Propiedades 1.3.12) yreemplazarla por la denominada propiedad hermitiana
z · w = w · z.
Es decir, cambiar el orden del producto escalar conjuga el resultado.La propiedad asociativa (E2) ahora es cierta únicamente respecto alsegundo factor:
(λv) · w = λ(v · w), v · (λw) = λ(v · w), ∀λ ∈ C.
“MatI” — 2018/3/6 — 12:59 — page 31 — #47
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 31
Se dice entonces que el producto escalar complejo es una forma ses-quilineal. Toda la artillería analítica desarrollada para Rn sigue sien-do válida con estos mínimos cambios.
En estos apuntes haremos un uso comedido de Cn, el productoescalar complejo y su norma asociada, hasta el Capítulo 5 donde yaes difícil soslayar su uso. Sirva esta breve nota para señalar que sucomplejidad adicional es mínima y sus ventajas en muchos y diversosámbitos, palpables.
Nota 1.3.16: Espacios vectoriales y productos escalaresen ámbitos más generales
En un curso introductorio como éste las construcciones algebraicasque vamos a exponer se van a limitar al máximo. De todas formasla esencia misma de las Matemáticas es estudiar las estructuras sub-yacentes de construcciones, o espacios, que a primera vista puedenparecer muy distintas. Como ya hemos señalado, buena parte de laspropiedades que hemos probado en esta sección depende únicamen-te de las Propiedades 1.3.4 y 1.3.12 por lo que son susceptibles deextenderse a ámbitos mucho más generales.
Sirva lo siguiente como ejemplo: consideremos el conjunto de lasfunciones continuas en [0, 1]:
C[0, 1] := {f : [0, 1] → R : f continua}.
La suma de funciones continuas y el producto de una función continuapor un número real define, nuevamente, funciones continuas. Aún esmás, estas operaciones satisfacen las Propiedades 1.3.4. En la termi-nología habitual se dice entonces que C[0, 1] es un espacio vectorial(véase el capítulo siguiente). Aún es más, podemos construir la si-guiente operación (forma bilineal), que a cada par de funciones f, g leasocia el número real
ˆ 1
0f(x)g(x) dx.
Es fácil comprobar que esta operación cumple todas y cada una delas propiedades listadas en las Propiedades 1.3.12. En este marco, loanterior se resume en la afirmación de que C[0, 1] con este productoescalar, la integral, es un espacio vectorial euclídeo.
“MatI” — 2018/3/6 — 12:59 — page 32 — #48
32 1.4 Matrices y su álgebra asociada
Tenemos por tanto una norma de funciones
�f� :=�ˆ 1
0|f(x)|2 dx (1.17)
una forma de medir el tamaño de f . Si repasamos con atención lademostración de la Proposición 1.3.13 comprobaremos que no se uti-liza en ningún momento cómo está definido el producto escalar, sólose hace uso de las Propiedades 1.3.12. En consecuencia, tenemos ladesigualdad de Cauchy-Schwarz que para las integrales queda comosigue
����ˆ 1
0f(x)g(x) dx
���� ≤� ˆ 1
0|f(x)|2 dx
�1/2� ˆ 1
0|g(x)|2 dx
�1/2
y que implica la desigualdad triangular (N3)
�f + g� ≤ �f� + �g�
procediendo como en el Corolario 1.3.14. Las propiedades (N1)-(N2)son inmediatas por lo que efectivamente (1.17) define una norma.
Esta forma de medir el tamaño de una función resulta ser una delas más naturales y conduce a los denominados espacios de funcionesde cuadrado integrable, en cierta forma, funciones de energía finita.El hecho de tomar el intervalo [0, 1] es irrelevante: se puede considerarfunciones e integrales sobre cualquier intervalo, incluso no acotado.
Volveremos a trabajar con este ejemplo en la parte final del Capí-tulo 3.
1.4. Matrices y su álgebra asociadaEl objetivo en lo que sigue es introducir las matrices. Los sistemas de
ecuaciones lineales proveerán la justificación de considerar tanto las matricescomo las operaciones elementales, es decir, el álgebra de matrices.
Nota 1.4.1: Sobre el vocablo Álgebra
El término “Álgebra” proviene del árabe, al-jebr, concretamente dellibro Ilm al-jebr wa’l-mukabala escrito por Abu Ábdallah Muhammad
“MatI” — 2018/3/6 — 12:59 — page 33 — #49
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 33
ibn Musa al-Khwarizmı, matemático y astrónomo persa que vivió en-tre los siglos VIII y IX. El libro podría traducirse como Compendio delcálculo por complección y equilibrio y versaba esencialmente sobre có-mo resolver ecuaciones de segundo grado, algunos problemas de áreasy volúmenes y tópicos sobre astronomía. al-Khwarizmı es conocidotambién por exponer en un segundo libro la notación arábiga, que enrealidad tiene origen hindú, la notación posicional de los números queutilizamos hoy en día en contraposición de la numeración romana ala que hizo obsoleta. El libro llegó al mundo occidental vía la escuelade traductores de Toledo, establecida por Alfonso X el Sabio a finalesdel siglo XI.
Aún es más, su propio nombre, al-Khwarizmı, se latinizó comoAlgoritmi. De ahí deriva el término “algoritmo” que ya ha aparecidoen estas notas como el conjunto de operaciones descritas de formaautocontenida que lleva a la solución de un problema.
El término Álgebra se utiliza en la actualidad para referirse a larama de las Matemáticas que estudia los conjuntos de símbolos y lasoperaciones, reglas, que se definen entre los elementos de cada con-junto. Tal definición permite por tanto estructuras muy abstractasaunque no hay que perder de vista que en su origen está el estudio deconjuntos bien conocidos como los números (enteros, naturales, racio-nales, reales o complejos), vectores, matrices, polinomios, funciones. . .
1.4.1. Forma matricial de un sistema de ecuaciones lineales
Llegados a este punto hemos resuelto ya un número considerable de sis-temas de ecuaciones lineales. Vamos a continuar con ello pero antes intro-duciremos una notación que hará más sencilla las operaciones al desecharinformación accesoria y permitir concentrarnos en lo esencial del problema.
Plateemos pues un simple sistema de ecuaciones modelo
x − y = 12x − y + z = 5−x + 3y + z = 4
(1.18)
La información de este sistema se puede resumir en la siguiente tabla de
“MatI” — 2018/3/6 — 12:59 — page 34 — #50
34 1.4 Matrices y su álgebra asociada
números
1 −1 0 12 −1 1 5
� �� �Matriz decoeficientes
− 1 3 1� �� �
Términoindependiente
4
� �� �Matriz ampliada
La parte de izquierda, la tabla de 3 filas y 3 columnas se denominamatriz de coeficientes o matriz del sistema. La columna de la derechaes simplemente el vector término independiente. La tabla entera recibeel nombre de matriz ampliada del sistema.
El método de Gauss se puede visualizar como un conjunto de operacionessimples que aplicadas sobre las filas de la matriz tienen por objeto “hacerceros” en sus entradas de forma ordenada. Veámoslo, nuevamente, con unejemplo:
1 −1 0 12 −1 1 5
−1 3 1 4
F2 → F2 − 2F1
F3 → F3 + F1∼
1 −1 0 10 1 1 30 2 1 5
F3 → F3 − 2F2∼
1 −1 0 10 1 1 30 0 −1 −1
.
Con el símbolo “∼” indicamos que los sistemas de ecuaciones lineales aso-ciados son equivalentes, es decir, que comparten las mismas soluciones.Hemos denotado además las operaciones efectuadas donde Fi denota la fila ide la matriz ampliada (no creemos necesaria ninguna explicación adicional).Nótese que el último sistema de la lista superior es, escrito en la forma usual,
x − y = 1y + z = 3
− z = −1
que puede resolverse en unos pocos pasos (x = 3, y = 2, z = 1).De forma semejante a la Definición 1.2.7, podemos definir las operaciones
elementales sobre matrices
“MatI” — 2018/3/6 — 12:59 — page 35 — #51
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 35
Se denominan operaciones elementales a las siguientes manipula-ciones sobre matrices
1. Cambiar (permutar) dos filas.
2. Multiplicar una fila por un número distinto de cero.
3. Sumar a una fila otra multiplicada por un número real.
Aunque hemos señalado este hecho antes, conviene mencionarlo explíci-tamente una vez más antes de continuar:
Nota 1.4.3: ParalelizaciónLas operaciones efectuadas al aplicar la eliminación gaussiana vie-nen condicionadas únicamente por la matriz de coeficientes. Más enconcreto, son las columnas que contienen los pivotes las que guíanlas operaciones elementales. De esta forma, si en el Ejemplo 1.18 sereemplaza el término independiente (1, 5, 4) por, digamos, (0, 2, 4),llegaríamos al sistema
x − y = 0y + z = 2
− z = 0
de forma que lo único que se modifica es el término independiente delsistema escalonado.
En pocas palabras, la eliminación gaussiana se aplica de acuerdoa lo que marca la matriz de coeficientes (de hecho, por las columnasque contienen los pivotes) mientras que el término independiente selimita a recoger estas operaciones. Esta propiedad se puede utilizarpara resolver sistemas de ecuaciones con los mismos coeficientes ydiferentes términos independientes de forma simultánea. Veremos unaaplicación de esta propiedad en el cálculo de la inversa (sección 1.6).
“MatI” — 2018/3/6 — 12:59 — page 36 — #52
36 1.4 Matrices y su álgebra asociada
1.4.2. Matrices: definición y primeras propiedades
Definición 1.4.4: Matrices
Una matriz es una tabla (rectangular) ordenada de números.
En principio consideraremos matrices reales aunque en el último capítulosurgirán, por necesidad, matrices con números complejos.
Para una matriz con m filas y n columnas, escribiremos
Diremos entonces que A es una matriz m× n.Los números reales que conforman la matriz reciben el nombre de ele-
mentos o entradas de la matriz. Los índices i, j son el índice de fila y elíndice de columna y hacen referencia a la posición de los elementos en lamatriz. Son, por así decirlo, coordenadas que sitúan la entrada en la matriz.
Los elementos aii, situados en la misma fila y columna reciben el nombrede diagonal principal de la matriz.
Ejemplo 1.4.5
La matrizA =
�1 3 4
−1 0 3
�
es una matriz 2 × 3 (2 filas, 3 columnas). Escribiremos entonces queA es 2 × 3. Además
a12 = 3, a23 = 3, a21 = −1.
Entre los muchos tipos de matrices que surgirán en estos apuntes resal-taremos las siguientes
Definición 1.4.6: (Algunos) tipos de matrices
Matriz columna o vector columna, son matrices de tamaño m × 1.
Matriz fila o vector fila, tamaño 1 × n, una única fila.
Matriz cuadrada n × n, mismo número de filas y columnas.
Matriz rectangular m × n con m �= n, esto es, distinto número de
“MatI” — 2018/3/6 — 12:59 — page 37 — #53
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 37
filas y columnas.
Matriz diagonal si aij = 0 si i �= j.
Matriz triangular superior si aij = 0 si i > j.
Matriz triangular inferior si aij = 0 si i < j.
Matriz simétrica si aij = aji.
Matriz antisimétrica si aij = −aji.
Matriz nula si aij = 0.
Ejemplo 1.4.7
He aquí diversos ejemplos de los tipos de matrices definidos anterior-mente:
Matriz columna
124
.
Matriz fila�1 2 4
�.
Matriz cuadrada�1 23 4
�.
Matriz rectangular�1 2 34 5 6
�o
1 23 45 6
.
Matriz diagonal�1 0 00 5 0
�o�1 00 4
�.
Matriz triangular superior�1 3 10 5 2
�.
Matriz triangular inferior�1 01 5
�.
Matriz simétrica�1 33 5
�.
“MatI” — 2018/3/6 — 12:59 — page 38 — #54
38 1.4 Matrices y su álgebra asociada
Matriz antisimétrica
0 1 −2−1 0 3
2 −3 0
.
Matriz nula�0 0 00 0 0
�o�0 00 0
�.
Nótese que una matriz es diagonal si y sólo si es triangular inferior ysuperior. Las matrices simétricas y antisimétricas son siempre matrices cua-dradas dado que, en caso contrario, no podríamos hacer la comprobación delos elementos aij y aji. Por último, todas los elementos de la diagonal de unamatriz antisimétrica son necesariamente nulos, puesto que es la única formade que se satisfaga aij = −aji en el caso particular de que i = j (esto es, queestemos sobre la diagonal).
Nota 1.4.8: Vectores como matricesLos vectores se pueden considerar una forma particular de matrices,bien como matrices fila o matrices columna. En lo que sigue, cuandoconvivan vectores con matrices, interpretaremos siempre los vecto-res como matrices columna. Si se desea trabajar con el vectoren forma de matrices fila, utilizaremos el operador trasposición, queintroduciremos en la sección siguiente.
1.4.3. Operaciones sobre matrices
Suma de matrices y producto por escalar
Definición 1.4.9: Suma de matricesDadas A y B del mismo tamaño m × n, la suma viene dada por
La suma de matrices y el producto por escalar cumplen:(a) Asociatividad de la suma: A + (B + C) = (A + B) + C.
(b) Conmutatividad: A + B = B + A.
(c) Elemento neutro de la suma: A + 0 = A, donde 0 es en estecaso la matriz del mismo tamaño que A cuyas entradas estáncompuestas únicamente de ceros.
(d) Elemento opuesto de la suma: A + (−A) = 0.
(e) Distributividad respecto a la suma de matrices: λ(A+B) =λA + λB.
(f) Distributividad respecto al producto de escalares: (λ +µ)A = λA + µA.
(g) Asociatividad del producto por escalar: (λµ)A = λ(µA).
(h) Elemento neutro del producto: 1A = A.
“MatI” — 2018/3/6 — 12:59 — page 40 — #56
40 1.4 Matrices y su álgebra asociada
Demostración. Es directa.
En las propiedades anteriores hemos asumido implícitamente que A, By C tienen el mismo tamaño. En otro caso las operaciones ahí listadas no sepodrían llevar a cabo.
Si examinamos las Propiedades 1.4.11 y las comparamos con aquéllasenunciadas en las Propiedades 1.3.4 comprobaremos que, esencialmente, sonlas mismas. Ello nos indica que la estructura subyacente, a este nivel, devectores y matrices es la misma. Después de todo una matriz se puede orde-nar como un vector anexando filas o columnas8 y tanto la suma de matricescomo el producto por escalar respetan esta reestructuración.
Sin embargo, la estructura de las matrices definen nuevas operacionescon sus propias características que sí hacen uso de la disposición geométricaque tienen sus entradas.
Trasposición
La trasposición de una matriz es simplemente una reordenación de cómose disponen sus elementos: se intercambian filas por columnas y es por tanto,propia de las matrices.
Definición 1.4.12: Matriz traspuesta
La traspuesta de una matriz A m × n, que denotaremos por A�, esla matriz n × m cuya entrada en la posición ij es aji. Es decir
8es de hecho como se almacenan en un ordenador. En última medida depende delprocesador numérico o lenguaje de programación que se esté utilizando. Por ejemplo, elalmacenamiento se lleva a cabo concatenando filas en C o en Mathematica, mientras quees por columnas en programas como Fortran o Matlab.
“MatI” — 2018/3/6 — 12:59 — page 41 — #57
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 41
entonces
A� =�3 −14 2
�, B� =
343
, C� =
�1 3 52 4 6
�.
Propiedades 1.4.14
(a)�A�
��= A.
(b) (A + B)� = A� + B�.
(c) (λA)� = λA�.
(d) A es simétrica si y sólo si A� = A.
(e) A es antisimétrica si y sólo si A� = −A.
Demostración. Directa.
Producto matricial
El producto de matrices es sin duda la operación propia de matrices másrelevante
Definición 1.4.15: Producto MatricialDadas dos matrices A m × n y B n × p, se define la matriz productoAB a la matriz de tamaño m × p cuya entrada i, j es el resultadodevuelto por el producto escalar del vector fila i de A por el vectorcolumna j de B.
Esto es,
(AB)ij =n�
r=1airbrj .
“MatI” — 2018/3/6 — 12:59 — page 42 — #58
42 1.4 Matrices y su álgebra asociada
De forma gráfica el producto se puede representar como sigue
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 43
D2 = DD =
2 0 00 1 00 0 2
, E2 = EE =
6 6 66 9 66 6 6
.
Observa que los productos AB, AC, BD, BE, CA, CD, CE, DA,DB, DC y EA, EB, EC además de AA = A2, B2 y C2 no se puedenrealizar porque las matrices implicadas no tienen tamaños compati-bles.
Nota 1.4.17: Sobre producto matricial entre vec-tores y matrices
En lo que sigue la interacción entre matrices y vectores cobrará espe-cial importancia. Recordemos (Nota 1.4.8) que hemos supuesto quelos vectores, cuando interaccionan con matrices se consideran siemprecomo matrices columna. En este marco, uno puede recuperar el pro-ducto escalar como un producto matricial sin más que trasponer unode los vectores. Es decir, si
u =
10
−1
, v =
2−1
1
⇒ u�v =
�1 0 −1
�
2−1
1
= 1 = u ·v.
Observa que se ha de trasponer el primer vector para que éste seaun vector/matriz fila. En caso contrario, aunque el producto sigueteniendo sentido, el resultado ya no es un número, sino una matriz:
u v� =
10
−1
�2 −1 1
�=
2 −1 −10 0 0
−2 1 1
.
Nota 1.4.18: El producto matricial por bloques
Hemos definido el producto matricial trabajando elemento a elemento.Sin embargo, en ocasiones, será útil visualizar el producto actuando deforma distinta, operando por bloques de la matriz. Para ello, conside-remos, alternativamente, las matrices no como una tabla de elementossino como una serie de vectores filas y/o columnas agrupados. Así, si
“MatI” — 2018/3/6 — 12:59 — page 44 — #60
44 1.4 Matrices y su álgebra asociada
A y B son m × n y n × p
A =
a�1
a�2
· · ·a�
m
, B =�b1 | b2 | . . . bp
�.
En este caso los vectores ai y bj son n × 1. Entonces el producto ABpuede interpretarse de tres maneras distintas
Nótese que en la propiedad (b) podemos estar hablando de matrices iden-tidades distintas a cada lado del igual. Es decir, si A es m × n, la propiedaddebería enunciarse de forma más correcta como AIn = ImA.
Por otro lado, observa detenidamente la última propiedad: la traspuestadel producto es el producto de traspuestas en el orden contrario. A partirde ahí, es fácil probar9 que (ABC)� = C�B�A� y de ahí generalizar alproducto de un número arbitrario de matrices.
La propiedad conmutativa no aparece lista listada por la sencilla razónde que no se cumple. Esto es, en general AB �= BA. De hecho puede pasarque:
(a) el producto AB sea calculable porque A y B tienen tamaños compati-bles, pero no sea el caso para el producto BA;
(b) que aunque AB y BA sean computables, no tengan el mismo tamaño;
(c) que aunque AB y BA sean del mismo tamaño, es decir en el caso deque A y B sean cuadradas10, muy probablemente el resultado de susproductos difieran.
En el Ejemplo 1.4.16 se ofrecen ejemplos para cualquiera de estos casos.Insistiremos en este hecho repetidamente. El producto de matrices es pro-
bablemente la primera operación matemática, quizás a la par con la compo-sición de funciones vista en el Cálculo11, que no es conmutativa. Ello puedeconducir a errores causados por el hábito adquirido al manejar los productosvistos hasta este momento que sí son conmutativos.
Ejemplo 1.4.22
Denotemos, como es de esperar, A2 = AA. Entonces(A + B)2 �= A2 + B2 + 2AB
para A y B matrices cuadradas del mismo tamaño. Por ejemplo, si
9Es fácil de verdad. ¿Te atreves a intentarlo?10¿Por qué?11relación no causal, todo sea dicho.
“MatI” — 2018/3/6 — 12:59 — page 47 — #63
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 47
tomamosA =
�1 22 1
�, B =
�−1 2−2 1
�
tenemos que
A + B =�0 40 2
�, (A + B)2 =
�0 40 2
� �0 40 2
�=
�0 80 4
�.
Por contra,
A2 + B2 + 2AB =�5 44 5
�+
�−3 0
0 −3
�+
�−10 8−8 10
�=
�−8 12−4 12
�
El valor correcto es
(A + B)2 = A2 + B2 + AB + BA,
fórmula que se puede verificar ajustada para el ejemplo anterior.De hecho, sólo en el caso de que AB = BA, esto es que A y
B conmuten, se recupera la identidad. Así, sí es cierta la relación(porque IA = AI = A)
(I + A)2 = I + A2 + 2A
y en generala
(I + A)n =n�
j=0
�n
j
�Aj .
a¿Por qué?
Aún es más, es posible construir matrices de forma que AB = 0 sin queni A o B sean matrices nulas.
Ejemplo 1.4.23: Matrices nilpotentes
Sean
A =�2 −14 −2
�, B =
2 2 −25 1 −31 5 −3
“MatI” — 2018/3/6 — 12:59 — page 48 — #64
48 1.4 Matrices y su álgebra asociada
Entonces es fácil, aunque tedioso en el segundo caso, comprobar que
A2 =�0 00 0
�, B3 =
0 0 00 0 00 0 0
(aunque B2 �= 0). Estas matrices se llaman matrices nilpotentesa.a“Nil” (del latín “nihil”), “nada” y “potente”, de “potencia”.
Definición 1.4.24: Traza de una matrizLa traza de una matriz es la suma de los elementos de la diagonala:
Tr AA =mın{m,n}�
i=1aii.
a “mın” denota el mínimo. Esto es, el mın{m, n} es precisamente la longitudde la diagonal de A.
Ejemplo 1.4.25
Sea
A =�
2 1−1 3
�, B =
�−1 0 2
2 −3 0
�, C =
3 21 −12 4
.
EntoncesTr A = 5, Tr B = −4, Tr C = 2.
Propiedades 1.4.26
Se tiene(a) Tr A = Tr A�
(b) Si A y B tienen tamaños compatibles, Tr(AB) = Tr(BA)
Demostración. La primera propiedad es consecuencia de que la dia-gonal de A no cambia al trasponer. Para la segunda, supongamos queA es m × n y B n × m. Si C = AB y D = BA, los elementos de la
“MatI” — 2018/3/6 — 12:59 — page 49 — #65
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 49
diagonal de estas matrices vienen dados por
cii =n�
j=1aijbji, djj =
m�
i=1bjiaij .
Entonces el resultado es consecuencia de cambiar el orden de dos su-matorios:
Tr(AB) = Tr C
=m�
i=1cii =
m�
i=1
n�
j=1aijbji =
n�
j=1
m�
i=1aijbji =
n�
j=1djj
= Tr D = Tr(BA).
1.4.4. Retorno a la forma matricial de un sistema de ecua-ciones lineales
Si repasamos lo tratado hasta ahora, hemos presentado las matrices comouna forma de recoger, compactar, la información de un sistema de ecuacio-nes. Posteriormente hemos introducido tres operaciones: suma de matrices,producto por escalar y el, a priori más extraño, producto matricial. Veremosque estas operaciones, producto matricial incluido, tienen ya sentido desdeel inicio en el apartado de sistemas de ecuaciones lineales.
Tomemos un sistema de ecuaciones particular. Por ejemplo
2x + y − z = −1x + 3y + z = 0x − y + 2z = 6x + z = 3
Es fácil comprobar que una (de hecho la) solución del sistema es x = 1,y = −1, z = 2, o escrito en forma de terna,
(1, −1, 2).
Notemos que es lo mismo que afirmar que se cumple la identidad matricial
2 1 −11 3 11 −1 21 0 1
� �� �A
1−1
2
� �� �x
=
−1063
� �� �b
.
“MatI” — 2018/3/6 — 12:59 — page 50 — #66
50 1.4 Matrices y su álgebra asociada
En esta expresión A es la matriz del sistema, b el término independiente, y xes el vector de solución. En conclusión, el hecho de que un vector x contengala solución de un sistema de ecuaciones lineales con matriz de coeficientes Ay término independiente b es equivalente a afirmar que se cumple
Ax = b.
La operación matriz-vector es sencillamente el producto matricial. Enton-ces la resolución del sistema de ecuaciones se reescribe en términos de unaecuación matricial cuyos datos e incógnita son vectores.
Echando mano de esta equivalencia, y lo que conocemos ya de las matricesy su álgebra, es fácil probar que
Propiedades 1.4.27
(a) Si x1 y x2 son soluciones del sistema de ecuaciones Az = b1 yAz = b2 respectivamente (misma matriz de coeficientes, distintotérmino independiente), entonces x1 + x2 es solución de Az =b1 + b2.
(b) Si x es solución del sistema de ecuaciones Az = b y entonces λxes solución de Az = λb.
(c) Si x es solución del sistema de ecuaciones Az = b y entoncestambién lo es del sistema (CA)z = Cb.
Demostración. Las dos primeras propiedades se siguen de la propie-dad distributiva. A modo de ejemplo,
A(x1 + x2) = Ax1 + Ax2 = b1 + b2.
La tercera, consecuencia de la propiedad asociativa, la dejamos comoejercicio.
Nota 1.4.28Las dos primeras propiedades son la linealidad del problema. Si unsistema de ecuaciones se visualiza como un proceso donde hay unaentrada, términos independientes b, y éste devuelve una respuesta,soluciones, x, la linealidad simplemente afirma que la suma de entra-das da lugar a suma de respuestas, y que a entradas proporcionales,respuestas proporcionales. En diversos ámbitos esta propiedad recibe
“MatI” — 2018/3/6 — 12:59 — page 51 — #67
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 51
el nombre de principio de superposición y es característico de losproblemas lineales.
Los fenómenos más simples se comportan de esta forma: ejercer eldoble de fuerza sobre un muelle provoca el doble de desplazamiento, sisumas fuerzas, obtienes suma de aceleraciones, etc. Sin embargo ya amediana escala surgen procesos no lineales que dominan el fenómeno.Por ejemplo, el rozamiento es no lineal. Ello hace el problema máscomplicado y menos predecible.
La linealidad, aplicada en matemáticas nos lleva esencialmente asistemas de ecuaciones lineales, matrices, etc y será el cuerpo centralde este texto. Observa que el Cálculo es muy no lineal: si x1 y x2 sonsoluciones de x2 + x = b1 y x2 + x = b2, entonces x1 + x2 no tiene porqué ser solución de x2 + x = b1 + b2, o que cos(x + y) �= cos x + cos y.La misma operación división es no lineal en el cociente: c/(a + b) �=c/a + c/b. Sin embargo, algunos de los operadores fundamentales enel cálculo sí son lineales. Por ejemplo, la derivada o la integral dela suma de funciones es la suma de las derivadas o de las integralesrespectivamente.
1.5. Teorema de Rouché-Frobenius
El método de Gauss, ya lo hemos visto, se basa en reducir el sistema aun sistema equivalente de fácil resolución. Concretamente, queremos llegara un sistema de ecuaciones lineales con matriz de coeficientes
Los símbolos “�” marcan los pivotes, y por tanto son necesariamente di-ferentes de cero, mientras que “∗” son los coeficientes que pueden serdiferentes de cero. El resto de entradas no representadas son entradas nulas,ceros.
Con el fin de enfatizar la estructura de los ceros de una matriz introdu-ciremos la noción de perfil de una matriz:
“MatI” — 2018/3/6 — 12:59 — page 52 — #68
52 1.5 Teorema de Rouché-Frobenius
Definición 1.5.1: Perfil de una matriz
La representación esquemática de una matriz (1.19), donde se incideen la posición de las entradas no nulas, recibe el nombre de perfil deuna matriz.
Ejemplos de perfiles de una matriz son
∗ ∗ ∗ ∗∗ ∗ ∗ ∗
∗ ∗ ∗ ∗∗ ∗ ∗
∗ ∗ ∗∗ ∗ ∗
,
∗ ∗ ∗∗ ∗
∗ ∗∗ ∗ ∗ ∗ ∗
∗ ∗ ∗∗ ∗ ∗
Se trata, en cualquier caso, de enfatizar cómo se disponen los elementos nonulos. Otro ejemplo, de mayor tamaño, se puede visualizar en la Figura 1.5(pág. 77).
Una matriz de esta forma se la conoce como matriz escalonada y co-rresponde a la matriz de coeficientes y la matriz ampliada de un sistemaescalonado.
Definición 1.5.2: Matriz escalonada y pivote
Una matriz A se dice escalonada si(a) Las filas con todo ceros, si las hay, están al final de la matriz.
(b) En cada fila, el primer elemento no nulo aparece a la derechadel primer elemento no nulo de la fila anterior
El primer elemento no nulo de cada fila de una matriz escalonadarecibe el nombre de pivote.
Las matrices escalonadas son triangulares superiores. Sin embargo, notodas las matrices triangulares superiores son escalonadas.
Ejemplo 1.5.3
Consideremos las matrices
A =
1 2 30 4 50 0 6
, B =
0 2 30 4 50 0 6
, C =
1 2 3 40 0 5 60 0 0 70 0 0 0
,
“MatI” — 2018/3/6 — 12:59 — page 53 — #69
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 53
Las tres matrices son triangulares, pero sólo A y C son matrices es-calonadas. Los pivotes son 1, 4 y 6 para A y 1, 5 y 7 para C.
La estructura escalonada permite dilucidar fácilmente si un sistema escompatible determinado (una única solución), compatible indeterminado (in-finitas soluciones) o incompatible (sin soluciones), sin más que examinar elnúmero de filas no nulas que quedan en la matriz de coeficientes y en lamatriz ampliada.
Así, supongamos que tenemos un sistema Ax = b, donde A es m × n yconstruyamos su matriz ampliada [A | b], de tamaño, por tanto, m×(n+1).Tras finalizar la eliminación gaussiana llegamos a una matriz ampliada de laforma [U | c] donde tanto U como [U | c] son matrices escalonadas.
Teorema 1.5.4: Rouché-Frobenius (o Rouché-Frobenius-Capelli-Kronecker-Fontené)
Sea un sistema escalonado con matriz de coeficientes U y matrizampliada [U | c] y sea r y r� el número de pivotes, o equivalentementede filas no nulas, de U y [U | c].
Entonces se puede dar uno de estos casos:
(a) r = r�. El sistema tiene solución. Además
(a.1) Si r = r� = n, la solución es única: tenemos un SistemaCompatible Determinado (SCD en lo que sigue).
(a.2) Si r = r� < n, la solución no es única, existen infinitassoluciones: es un Sistema Compatible Indeterminado(SCI en lo que sigue).
(b) r = r� − 1. El sistema en este caso no tiene solución, es unSistema Incompatible (SI en lo que sigue).
En realidad no hay mucho que demostrar en el teorema anterior. Se tratade visualizar, una vez aplicada la eliminación gaussiana, si es posible resolverel sistema escalonado y si en este proceso necesitamos echar mano, o no, deparámetros para describir todas las soluciones.
“MatI” — 2018/3/6 — 12:59 — page 54 — #70
54 1.5 Teorema de Rouché-Frobenius
Nota 1.5.5El Teorema anterior recibe el nombre de Teorema de Rouche-Capellien el mundo anglosajón y en la escuela italiana. En las matemáticasrusas es conocido como Kronecker-Capelli, mientras que en Francia sedenomina teorema de Rouché-Fontené.
Las razones que explican esta disparidad de nombres hay que bus-carlas en que no está claro ni quién fue el primero que enunció esteresultado ni quién fue el primero probarlo. Este aparente desconciertose puede achacar a las diferentes notaciones que se utilizaban y que losresultados que se mencionaban eran equivalentes, o casi equivalentes.A menudo cada país o nacionalidad defiende, en ocasiones recurriendoa argumentos más emotivos que científicos, la primacía de “su mate-mático”. El resultado final pueden teoremas con nombres formadospor una auténtica ristra de matemáticosa. En España y en muchospaíses de Latinoamérica este resultado recibe el nombre de Teoremade Rouché-Frobenius por la influencia del matemático riojano JulioRey Pastor, el matemático español más relevante de la primera mitaddel siglo XX.
aValga de ejemplo el Teorema de la Divergencia o Teorema de Gauss-Green-Ostrogradsky, o la condición ínfimo-supremo o condición Ladyzenskaja-Babuska-Brezzi (que en todo caso se puede atribuir a J. Nečas.)
En el Algoritmo 5 exponemos cómo reducir una matriz cualquiera a suforma reducida. Observa que es esencialmente el Algoritmo 2 con la diferen-cia de que “matriz” reemplaza a “sistema de ecuaciones lineales”, “fila” a“ecuación”, etc.
Definición 1.5.6: Rango de una matriz
Se denomina rango de una matriz, y escribiremos rangA, al númerode filas no nulas de una matriz, o equivalentemente al número depivotes, que quedan tras reducirla a la forma escalonada utilizandooperaciones elementales.
En particular tenemos esta propiedad:
Proposicion 1.5.7
Si A es m × n,rang A ≤ mın{m, n}.
“MatI” — 2018/3/6 — 12:59 — page 55 — #71
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 55
Entrada: Matriz A m × n + 11 k = 0, r = 1;2 Mientras no todas las filas k + 1 . . . , m sean nulas hacer3 Hacer k = k + 1;4 Buscar para j ∈ {k, . . . m} el mínimo s ∈ {r, r + 1, . . . , n}
tal que ajs �= 0;5 Intercambiar filas k y j;6 Hacer r = s ; // akr es el nuevo pivote7 Para j = k + 1, . . . , m hacer8 Restar a la fila j-ésima la k-ésima multiplicada por un
factor de forma que se cancele ajr
9 Fin10 Hacer r = r + 111 Fin
// Existen k filas distintas de ceroSalida: Matriz escalonada
Algoritmo 5: Reducción de una matriz a su forma escalonada
Demostración. Tras reducirla a una forma escalonada, esquemáti-camente representada en (1.19), el número de pivotes no puede sersuperior al número de filas o de columnas.
Observa que la definición de rango pudiera parecer anterior ambigua:a priori nada asegura que si realizamos diferentes operaciones elementaleslleguemos a dos formas escalonadas con diferente número de filas no nulas.No es el caso.
Proposicion 1.5.8
Si U1 y U2 son dos formas escalonadas obtenidas a partir de A, en-tonces las columnas que contienen los pivotes son las mismas en losdos casos. En particular, el número de pivotes, o equivalentemente defilas distintas de cero, en U1 y U2 es el mismo.
Demostración. No estamos todavía preparados para probar este re-sultado. Lo veremos más adelante (ver Teorema 2.3.6 y Corolario 2.3.8)tras desarrollar la teoría de espacios vectoriales en el Capítulo 2.
“MatI” — 2018/3/6 — 12:59 — page 56 — #72
56 1.5 Teorema de Rouché-Frobenius
En particular la proposición anterior prueba que la definición de rangoes correcta. Ilustremos12 este resultado con un ejemplo
Ejemplo 1.5.9
Consideremos la matriz
A =
2 1 0−1 2 1
1 3 1
Vamos a reducirla a su forma escalonada de dos formas distintas:Forma 1
2 1 0−1 2 1
1 3 1
F2 → F2 + 12 F1
F3 → F3 − 12 F1∼
2 1 00 5
2 10 5
2 1
F3 → F3 − F2∼
2 1 00 5
2 10 0 0
Forma 2
2 1 0−1 2 1
1 3 1
F1 ↔ F2∼
−1 2 12 1 01 3 1
F2 → F2 + 2F1
F3 → F3 + F1∼
−1 2 10 5 20 5 2
F3 → F3 − F2∼
−1 2 10 5 20 0 0
Observa que en las dos formas nos quedan dos filas diferentes de cero.Equivalentemente, tenemos dos pivotes, {2, 5
2} en el primer caso y{−1, 5} en el segundo, por lo que el rango de A es 2.
Es decir, fijada la matriz inicial, la estructura de la matriz escalonadaa la que llegamos vía cualquier variante de la eliminación gaussiana queconsideremos es la misma.
12“Ilustremos” es la palabra apropiada. Por supuesto un ejemplo no es una demostración,como enunciar en un día soleado “que nunca llueve” es una afirmación incorrecta.
“MatI” — 2018/3/6 — 12:59 — page 57 — #73
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 57
Ejemplo 1.5.10
Si partiendo de dos matrices A y B hemos llegado a estas matricesescalonadas
∗ ∗ ∗ ∗ ∗ ∗∗ ∗ ∗ ∗
∗ ∗ ∗∗ ∗
,
∗ ∗ ∗ ∗ ∗ ∗∗ ∗ ∗ ∗ ∗
∗ ∗ ∗∗ ∗
las matrices de partida, A y B no pueden ser la misma matriz, puestoque los pivotes en el primer caso están en las columnas 1, 3, 4 y 5 yen el segundo 1, 2, 4 y 5.
Con el concepto de rango en mente, en el Teorema de Rouché-Frobenius(Teorema 1.5.4) las cantidades r y r� son simplemente el rango de la matrizdel sistema y la matriz ampliada. El Teorema 1.5.4 se puede reformularentonces en los siguientes términos
Teorema 1.5.11
Sea un sistema de ecuaciones Ax = b con m × n y definamos �A =[A | b] la matriz ampliada. Entonces:
(a) Si rang �A = rang A = n el sistema tiene solución única (SCD).
(b) Si rang �A = rang A < n el sistema tiene infinitas soluciones(SCI).
(c) Si rang �A = rang A + 1 el sistema es incompatible (SI).
Además éstos son todos los casos posibles.
Corolario 1.5.12En un sistema Ax = b compatible con A m × n, las soluciones de-penden de n − rang A parámetros. En particular, si n > m, el sistematiene infinitas soluciones.
Demostración. Obvia.
Acabaremos tratando el caso particular de las matrices cuadradas
“MatI” — 2018/3/6 — 12:59 — page 58 — #74
58 1.5 Teorema de Rouché-Frobenius
Corolario 1.5.13Sea A una matriz cuadrada n × n, b ∈ Rn. Entonces Ax = b tienesolución única si y sólo si rang A = n. En tal caso cualquier sistema deecuaciones lineales con A como matriz de coeficientes será compatibledeterminado.
Recíprocamente, si el sistema Ax = b no tiene solución única,cualquier sistema de ecuaciones lineales con A con matriz de coefi-cientes será o bien compatible indeterminado o incompatible.
Demostración. Para que el sistema tenga solución, independiente-mente del término independiente que consideremos, tras la eliminacióngaussiana debemos llegar a un sistema escalonado de la forma
� ∗ ∗ ∗ ∗ . . . ∗� ∗ ∗ ∗ · · · ∗
� ∗ ∗ · · · ∗. . . . . . . . . ...
. . . . . . ...� ∗
(1.20)
Ello implica que la solución es única, pues todas y cada una de las co-lumnas tienen pivote. Recíprocamente, si la solución de un sistema esúnica, no debe haber parámetros luego cada columna tiene un pivote.Hemos obtenido por tanto un sistema escalonado de la forma (1.20)que tiene solución sea cual sea el término independiente del sistemade partida.
Definición 1.5.14: Matriz escalonada reducidaUna matriz se dice que tiene forma escalonada reducida si es esca-lonada y las columnas que contienen pivotes están formadas por cerossalvo el pivote que toma valor igual a uno.
Ejemplos de matrices escalonadas reducidas son las siguientes
1 0 0 −10 1 0 00 0 1 3
,
1 0 0 −10 0 1 20 0 0 0
,
1 0 00 0 10 0 0
.
Hemos visto que una matriz se puede llevar a forma escalonada vía opera-
“MatI” — 2018/3/6 — 12:59 — page 59 — #75
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 59
ciones elementales. De hecho, si concluimos que la eliminación gaussianaconsiste esencialmente en llevar la matriz ampliada del sistema a su for-ma escalonada, el método de Gauss-Jordan puede interpretarse como unconjunto de operaciones conducentes a transformar la matriz ampliada a suforma escalonada reducida.
Proposicion 1.5.15
La forma escalonada reducida de una matriz es única.
Demostración. Habremos de esperar al Capítulo 2, concretamen-te al Teorema 2.3.6 y el Corolario 2.3.8, para poder demostrar esteresultado.
Es decir, cuando una matriz se lleva a su forma reducida escalonada, seencontrara con una única matriz al final del proceso, independientemente dequé operaciones elementales se hayan usado para llegar a esta forma.
Ejemplo 1.5.16
Consideremos la siguiente matriz
A =
2 1 −1 21 2 0 11 −1 1 3
−1 4 0 −3
.
Entonces
2 1 −1 21 2 0 11 −1 1 3
−1 4 0 −3
F2 → F2 − 12 F1
F3 → F3 − 12 F1
F4 → F4 + 12 F1∼
2 1 −1 20 3
212 0
0 −32
32 2
0 92 −1
2 −2
F3 → F3 + F2
F4 → F4 − 3F2∼
2 1 −1 20 3
212 0
0 0 2 20 0 −2 −2
“MatI” — 2018/3/6 — 12:59 — page 60 — #76
60 1.6 Inversa de una matriz
F4 → F4 + F3∼
2 1 −1 20 3
212 0
0 0 2 20 0 0 0
.
La fase correspondiente a la eliminación gaussiana acabaría en estepunto. Además vemos que la matriz original tiene rango 3. La formaescalonada reducida requeriría continuar un poco más:
2 1 −1 20 3
212 0
0 0 2 20 0 0 0
F1 → 12 F1
F2 → 23 F2
F3 → 12 F3∼
1 12 −1
2 10 1 1
3 00 0 1 10 0 0 0
F2 → F2 − 13 F3
F1 → F1 + 12 F3∼
1 12 0 3
2
0 1 0 −13
0 0 1 10 0 0 0
F1 → F1 − 12 F2∼
1 0 0 53
0 1 0 −13
0 0 1 10 0 0 0
Podríamos retomar la matriz original A y llevarla a su forma escalo-nada reducida utilizando otro tipo de operaciones. En cualquier casose llega a la misma matriz, no importa las vueltas que demos a estasoperaciones.
1.6. Inversa de una matrizUna de las características de un operación básica como la suma o el
producto es la existencia del opuesto/inverso de un elemento. En el caso delproducto de números reales es claro: para 0 �= a ∈ R, existe a−1 de formaque aa−1 = a−1a = 1.
“MatI” — 2018/3/6 — 12:59 — page 61 — #77
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 61
En esta sección extenderemos, en la medida de lo posible, esta propiedada las matrices. Parece evidente que el papel del “1” lo debe realizar la matrizidentidad
In =
1. . .
1
.
Así pues, el problema que nos planteamos es:
¿Dada una matriz A, existe otra matriz C tal que AC = CA = I?
Al formular la cuestión de esta forma estamos asumiendo implícitamenteque A debe ser cuadrada. Encontramos en este punto la primera limita-ción: la inversa se considera únicamente para matrices n × n.
Definición 1.6.1: Matriz inversaDada A n × n, se define la matriz inversa, que denotaremos porA−1, a la matriz que cumple
AA−1 = A−1A = In. (1.21)
Si A tiene inversa diremos que la matriz A es invertible o regular. Encaso contrario, diremos que A es singular o simplemente no invertible.
Un análisis preliminar nos conduce a cuatro cuestiones cuya respuestanos va a llevar el resto de la sección:
C1 ¿La inversa de una matriz existe siempre? (Existencia).
C2 ¿La inversa de una matriz, de existir, es única? (Unicidad).
C3 Inversas a izquierda y derecha:
C3a Si A es cuadrada y AC = In, entonces ¿C es la (¿una?) inversade A?
C3b Si A es cuadrada y CA = In, entonces ¿C es la (¿una?) inversade A?
C4 ¿Cómo se calcula la inversa de una matriz?
“MatI” — 2018/3/6 — 12:59 — page 62 — #78
62 1.6 Inversa de una matriz
Notemos que las condiciones C3a y C3b plantean, sencillamente, que sies cierta la siguiente relación:
AC = I ⇐⇒ CA = I.
Esto es, si en lugar de hacer la doble comprobación de (1.21), es suficientehacer solo una de ellas. Dado que el producto matricial no es conmutativoesta cuestión dista mucho de ser trivial.
A lo largo de esta sección responderemos a las cuatro preguntas perono en el orden planteado, sino en el de menor a mayor dificultad. Probare-mos, asimismo, los resultados que se deduzcan de forma inmediata de estadiscusiones. El lector impaciente que quiera obviar esta discusión puede irdirectamente al Teorema 1.6.13 (pag. 74).
Cuestión C2: ¿La inversa, de existir, es única?
La respuesta es un rotundo Sí.
Proposicion 1.6.2: Unicidad de inversa
Sea A una matriz cuadrada para las que existen dos matrices C y Dtales que AC = DA = I. Entonces, C = D. En particular la inversade una matriz, de existir, es única.
Demostración. La demostración es sorprendentemente sencilla. Plan-teemos esta cuestión, ¿cuánto valdría el producto DAC? Por un lado
DAC = D(AC) = DI = D.
Por otro lado,DAC = (DA)C = IC = C.
La propiedad asociativa implica que los resultados deben coincidir. Esdecir, que tenemos
D = DAC = C
y el resultado queda probado.
“MatI” — 2018/3/6 — 12:59 — page 63 — #79
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 63
Propiedades 1.6.3: inversa de la inversa, trasposi-ción y producto
Se tiene que(a) A es invertible si y sólo si A−1 es invertible y
�A−1�−1 = A.
(b) Si A y B tienen inversa, AB tiene inversa y (AB)−1 = B−1A−1.
(c) A tiene inversa si y sólo si A� tiene inversa. Además�A��−1 =
�A−1��.
Demostración. Como
I = AA−1 = A−1A,
la definición de matriz inversa (Definición 1.6.1), aplicada a A−1 con-cluye que (A−1)−1 = A.
Para ver que AB tiene inversa es suficiente con verificar que lamatriz C = B−1A−1 cumple C(AB) = (AB)C = I. Así, en primerlugar, se tiene que
(AB)(B−1A−1) = A(BB−1� �� �
I
)A−1 = AIA−1 = AA−1 = I
donde hemos aplicado la propiedad asociativa. Análogamente podemosverificar que
(B−1A−1)(AB) = I.
Por tanto podemos concluir que AB es invertible como consecuencia deuna propiedad más fuerte: hemos comprobado que la matriz B−1A−1
cumple la definición de inversa de AB.Finalmente, para comprobar que (A�)−1 = (A−1)� procederíamos
de forma similar:
A�(A−1)� = (A−1A)� = I� = I.
Hemos hecho uso que la traspuesta del producto es el producto de tras-puestas en distinto orden (véase punto (e) de las Propiedades 1.4.21).Análogamente se puede verificar que (A−1)�A� = I. con lo que sededuce el tercer punto del resultado.
Vale la pena señalar que salvo para la inversa de la traspuesta, de lo único
“MatI” — 2018/3/6 — 12:59 — page 64 — #80
64 1.6 Inversa de una matriz
que hemos hecho uso en las demostraciones anteriores es de la propiedadasociativa y el carácter de elemento neutro de la matriz identidad (AI =IA = A). La misma demostración es válida en otras construcciones másgenerales siempre que podamos echar mano de estas dos propiedades.
Nota 1.6.4
Es habitual denotar A−� para referirse a la inversa de la traspuesta.Es decir,
A−� := (A−1)� = (A�)−1.
Cuestión C1: ¿Existe siempre la inversa de una matriz?
La respuesta, en esta ocasión, es un rotundo no. Incluso entre los númerosreales ya sabemos que el “0” no tiene inverso. La matriz nula tampoco dadoque A0 = 0 para cualquier matriz, pero en este caso, existe un conjuntomayor, de hecho infinito13, que no tiene inversa.
Ejemplo 1.6.5
La matrizA =
�3 −2
−6 4
�
no tiene inversa. En efecto, supongamos que existiera
C =�c11 c12c21 c22
�
de forma que�1
1
�= AC =
�3c11 − 2c21 3c12 − 2c22
−6c11 + 4c21 −6c12 + 4c22
�.
Concluiríamos de esta manera que las entradas de C son solución delos sistemas�
3c11 − 2c21 = 1− 6c11 + 4c21 = 0
�3c21 − 2c22 = 0
− 6c21 + 4c22 = 1
Es fácil probar que ambos sistemas son incompatibles, luego no existeinversa para esta matriz.
13Pero es un infinito menor que el de las matrices que sí tienen inversa. Puede parecerextraño hablar de infinitos mayores que otros, pero lo puedes entender de la siguientemanera: si escoges una matriz cuadrada al azar, la probabilidad de que ésta sea invertiblees 1.
“MatI” — 2018/3/6 — 12:59 — page 65 — #81
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 65
Cuestión C4: ¿cómo calcular la inversa?
El Ejemplo 1.6.5 nos proporciona además la idea de cómo se puede cal-cular la inversa de una matriz. Veámoslo con otro ejemplo.
Tomemos la matriz 3 × 3
A =
−1 1 2−3 0 1
2 −1 −2
.
Vamos a buscar C tal que AC = I3. Para ello, escribamos C por columnas
C =�
c1 c2 c3�
.
Entonces, haciendo uso del producto matricial por bloques (ver Nota 1.4.18y Ejemplo 1.4.19), concluimos que
I3 = AC =�
Ac1 Ac2 Ac3�
.
En consecuencia, las columnas de C son soluciones de los sistemas
Ac1 =
100
, Ac2 =
010
, Ac3 =
001
,
esto es, los sistemas lineales
−1 1 2 1−3 0 1 0
2 −1 −2 0
,
−1 1 2 0−3 0 1 1
2 −1 −2 0
,
−1 1 2 0−3 0 1 0
2 −1 −2 1
.
Observemos que los sistemas de ecuaciones lineales no son totalmente dis-tintos: comparten la matriz de coeficientes con diferentes términos inde-pendientes. En lugar de tratar cada uno por separado, podemos resolverlossimultáneamente (Nota 1.4.3):
−1 1 2 1 0 0−3 0 1 0 1 0
2 −1 −2 0 0 1
F2 → F2 − 3F1
F3 → F3 + 2F1∼
−1 1 2 1 0 00 −3 −5 −3 1 00 1 2 2 0 1
F3 → F3 + 13 F2∼
−1 1 2 1 0 00 −3 −5 −3 1 00 0 1
3 1 13 1
“MatI” — 2018/3/6 — 12:59 — page 66 — #82
66 1.6 Inversa de una matriz
Las columnas de la inversa podrían calcularse resolviendo los sistemas linea-les (escalonados)
−1 1 2 10 −3 −5 −30 0 1
3 1
,
−1 1 2 00 −3 −5 10 0 1
313
,
−1 1 2 00 −3 −5 00 0 1
3 1
.
Sin embargo, en lugar de seguir por esta vía, recurriremos al método deGauss-Jordan. De hecho, ésta es una de pocas las situaciones donde resultaser competitivo frente al método de Gauss pues evitaremos resolver tressistemas escalonadas pagando el precio de prolongar la eliminación gaussiana.Así,
−1 1 2 1 0 00 −3 −5 −3 1 00 0 1
3 1 13 1
F3 → 3F3
F2 → − 13 F2
F1 → −F1∼
1 −1 −2 −1 0 00 1 5
3 1 −13 0
0 0 1 3 1 3
F2 → F2 − 53 F3
F1 → F1 + 2F3∼
1 −1 0 5 2 60 1 0 −4 −2 −50 0 1 3 1 3
F1 → F1 + F2∼
1 0 0 1 0 10 1 0 −4 −2 −50 0 1 3 1 3
.
Las tres columnas c1, c2, y c3 de la (posible) matriz inversa son solución,respectivamente, de los sistemas lineales
1 0 0 10 1 0 −40 0 1 3
,
1 0 0 00 1 0 −20 0 1 1
,
1 0 0 10 1 0 −50 0 1 3
.
En otras palabras, las columnas de la (supuesta) matriz inversa vienen dadaspor
c1 =
1−4
3
, c2 =
0−2
1
, c3 =
1−5
3
,
de forma que la matriz inversa, de existir, habría de ser, necesariamente, lamatriz
C =
1 0 1−4 −2 −5
3 1 3
.
“MatI” — 2018/3/6 — 12:59 — page 67 — #83
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 67
Hablamos constantemente de posible o supuesta inversa porque lo quehemos hallado, con los cálculos anteriores, es una matriz C tal que
AC = I3.
Habría por tanto que comprobar que se verifica CA = I3. Basta multipli-car para ver que efectivamente es así. De todas formas esta cuestión en-tronca directamente con la cuestión C3. Veremos que de hecho esta últimacomprobación no es necesaria cuando respondamos (afirmativamente) a estacuestión.
Las operaciones anteriores se sistematizan en el Algoritmo 6 que devuelvela matriz inversa si ésta existe.
Entrada: A n × n1 Construir [A | I];2 Reducir
�A
�� I�
a su forma escalonada reducida queescribiremos [E | C], con E y C n × n ;
3 Si E = In entonces4 A−1 = C;5 devolver A−1
6 si no7 devolver “A no tiene inversa”8 Fin
Algoritmo 6: Cálculo de inversa en forma (casi) algorítmica
Ejemplo 1.6.6
Consideremos la matriz
A =
1 −1 20 1 21 −3 −2
Para calcular la inversa procedemos según el Algoritmo 6:
1 −1 2 1 0 00 1 2 0 1 01 −3 −2 0 0 1
F3 → F3 − F1∼
1 −1 2 1 0 00 1 2 0 1 00 −2 −4 −1 0 1
F3 → F3 + 2F2∼
1 −1 2 1 0 00 1 2 0 1 00 0 0 −1 2 1
“MatI” — 2018/3/6 — 12:59 — page 68 — #84
68 1.6 Inversa de una matriz
No hace falta continuar. No existe forma posible de que en la matriza la izquierda de la barra vertical, denotada por E en el algoritmo,se obtenga la matriz identidad vía operaciones elementales. La línea3 del algoritmo 6 indica que la matriz A no es invertible.
Ejemplo 1.6.7
Un simple cambio en la matriz del Ejemplo anterior nos devuelve unamatriz invertible. En efecto, trabajaremos ahora con
A =
1 −1 20 1 21 −4 −2
.
(La posición 3, 2 ha sido modificada, de −3 a −4). Para calcular lainversa procedemos según el Algoritmo 6:
1 −1 2 1 0 00 1 2 0 1 01 −4 −2 0 0 1
F3 → F3 − F1∼
1 −1 2 1 0 00 1 2 0 1 00 −3 −4 −1 0 1
F3 → F3 + 3F2∼
1 −1 2 1 0 00 1 2 0 1 00 0 2 −1 3 1
F3 → 12 F3∼
1 −1 2 1 0 00 1 2 0 1 00 0 1 −1
232
12
F2 → F2 − 2F3
F1 → F1 − 2F3∼
1 −1 0 4 −3 −10 1 0 1 −2 −10 0 1 −1
232
12
F1 → F1 + F2∼
1 0 0 3 −5 −20 1 0 1 −2 −10 0 1 −1
232
12
.
Por tanto,
A−1 =
3 −5 −21 −2 −1
−12
32
12
como se puede comprobar al multiplicar a izquierda por esta matrizla matriz A.
“MatI” — 2018/3/6 — 12:59 — page 69 — #85
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 69
C3: Inversa a izquierda e inversa a derecha
En este apartado respondemos la cuestión C3, al tratar la relación entreinversa a derecha y a izquierda. En resumen, mostraremos que esta dobleverificación no es necesaria. Esto es, si A es cuadrada, AB = I si y sólosi BA = I y entonces B = A−1. Como ya hemos comentado, dado que elproducto matricial no es conmutativo, este resultado es mucho más fuertede lo que puede parecer en una primera lectura. Su demostración requiere,eso sí, de cierta preparación previa.
Teorema 1.6.8: rango e inversa a derecha
Sea A una matriz cuadrada n×n. Entonces existe C tal que AC = In
si y sólo si rang A = n.
Demostración. Probaremos que existe C tal que AC es la identidadsi y sólo si Ax = b admite solución para cualquier término inde-pendiente b. La aplicación del Corolario 1.5.13 probará entonces elresultado.
Así, si la matriz C anteriormente referida existe, una solución delsistema Ax = b es x = Cb. En efecto:
A(Cb) = (AC)b = Ib = b.
Recíprocamente, si para todo b el problema Ax = b tiene solución,podemos plantear, como en el ejemplo con el que hemos abierto elapartado anterior (página 65), los sistemas
Ac1 =
10...0
Ac2 =
01...0
, Acn =
00...1
,
para construir seguidamente la matriz
C =�
c1 c2 · · · cn
�
y concluir queAC = In.
Restaría por probar que la matriz C enunciada en el teorema anterior esla inversa. Para mostar este resultado recurriremos a un tipo especial de ma-
“MatI” — 2018/3/6 — 12:59 — page 70 — #86
70 1.6 Inversa de una matriz
trices cuadradas, las matrices elementales, que permiten expresar las opera-ciones elementales como productos matriciales. Arrancamos con un ejemploilustrativo
Ejemplo 1.6.9: Reducción a forma escalonaday matrices elementales
Tomemos la matriz
A =
1 1 21 1 42 1 3
(1.22)
y vamos a llevar a su forma escalonada reducida. Dado que el rang A =3, esta matriz no es otra que la identidad. Veámoslo
1 1 21 1 42 1 3
F2 → F2 − F1
F3 → F3 − 2F1∼
1 1 20 0 20 −1 −1
F2 ↔ F3∼
1 1 20 −1 −10 0 2
F2 → −F2
F3 → 12 F3∼
1 1 20 1 10 0 1
F2 → F2 − F3
F1 → F1 − 2F3∼
1 1 00 1 00 0 1
F1 → F1 − F2∼
1 0 00 1 00 0 1
.
Observa que la primera tanda de operaciones se puede escribir comoun producto matricial utilizando matrices (denotadas por E1 y E2)apropiadas:
11
−2 1
� �� �=:E2
1−1 1
1
� �� �=:E1
1 1 21 1 42 1 3
=
11
−2 1
1 1 20 0 22 1 3
=
1 1 20 0 20 −1 −1
Las matrices E1 y E2 son el resultado de aplicar la operación querepresentan, F2 → F2 − F1 y F3 → F3 − 2F1 respectivamente, a lamatriz identidad. Continuemos. La segunda operación, el intercambio
“MatI” — 2018/3/6 — 12:59 — page 71 — #87
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 71
de las filas 2 y 3 F2 ↔ F3, se puede representar nuevamente como elproducto por una matriz (denotada por E3):
11
1
� �� �=:E3
1 1 20 0 20 −1 −1
=
1 1 20 −1 −10 0 2
.
El resto de operaciones tiene también su representación como produc-tos por matrices similares a las anteriores:
1−1
1
� �� �=:E5
11
12
� �� �=:E4
1 1 20 −1 −10 0 2
=
1 1 20 1 10 0 1
.
Finalmente
1 −11
1
� �� �=:E8
1 −21
1
� �� �=:E7
11 −1
1
� �� �=:E6
1 1 20 1 10 0 1
=
11
1
.
Dicho de otra manera, recopilando las operaciones efectuadas sobre lamatriz A, hemos mostrado que
E8E7E6E5E4E3E2E1A = I3.
Observa que el orden es esencial, como no podría ser menos con elproducto matricial implicado. De todas formas, no es difícil ver quehay bloques donde las matrices conmutan, precisamente aquellos gru-pos que representan operaciones elementales que se pueden aplicar enun orden o en otro:
E1E2 = E2E1, E4E5 = E5E4, yE7E8 = E8E7.
En resumen, las operaciones elementales que hemos considerado sobrelas matrices (Definición 1.4.2) se puede efectuar multiplicando por matricesapropiadas, las conocidas como matrices elementales:
“MatI” — 2018/3/6 — 12:59 — page 72 — #88
72 1.6 Inversa de una matriz
Definición 1.6.10: Matrices elementalesLas matrices elementales son las matrices n×n resultado de aplicaruna operación elemental de la eliminación gaussiana sobre la matrizidentidad de orden n.
Ejemplos de matrices elementales son las matrices E1, E2, . . . , E8 utiliza-das en el ejemplo anterior. Un breve análisis permite categorizar las matriceselementales en los siguientes tipos
Eji(r) =
1. . .
1. . .
r 1. . .
1
↑ ↑i j
← i
← j , (1.23)
Eij =
1. . .
0 1. . .
1 0. . .
1
↑ ↑i j
← i
← j (1.24)
Ei(r) =
1. . .
r. . .
1
↑i
← i
, con r �= 0 (1.25)
Entonces:
“MatI” — 2018/3/6 — 12:59 — page 73 — #89
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 73
Eij(r)A es el resultado de sumar a la fila j de A la fila i de A multi-plicada por r.
EijA intercambia las filas i y j de A.
Ei(r)A multiplica la fila i de A por r.
Las matrices elementales son invertibles, como lo son las operaciones querepresentan, y sus inversas vienen dadas por
E−1ij (r) = Eij(−r), E−1
ij = Eij , E−1i (r) = Ei(1/r) (1.26)
que representan precisamente la operación que revierte la operación elemen-tal aplicada.
Ejemplo 1.6.11
Sean las matrices elementales
E31(−2) =
11
−2 1
, E23 =
11
1
, E2(4) =
11
4
.
(1.27)Entonces
�E31(−2)
�−1 =
11
2 1
= E31(2), (E23)−1 =
11
1
= E23
�E2(4)
�−1 =
11
14
= E2(1
4).
como bien se puede comprobar sin más que multiplicar las matricesimplicadas.
Teorema 1.6.12: rango e inversa a izquierda
Sea A una matriz cuadrada n×n. Entonces existe D tal que DA = In
si y sólo si rang A = n.
Demostración. Como el resultado es una equivalencia, una dobleimplicación, vamos a probar que una afirmación implica la otra.⇐ ] Si A tiene rango n, su forma escalonada reducida es de hecho la
“MatI” — 2018/3/6 — 12:59 — page 74 — #90
74 1.6 Inversa de una matriz
matriz identidad. Por tanto, existen matrices elementales
EM · · · E2E1A = I (1.28)
(ver Ejemplo 1.6.9). Si denotamos por D = EM · · · E1, acabamosde probar en (1.28) que
DA = I
y esta implicación está demostrada.
⇒ ] Recíprocamente, si existe D tal que DA = I, el Teorema 1.6.8aplicado a D prueba que rang D = n. La implicación ya probadadel presente resultado muestra que debe existir F tal que FD =In. En suma, tenemos FD = In = DA. Por la Proposición 1.6.2,podemos concluir que F = A y por tanto AD = I (notemos queen particular hemos probado que A es invertible). El Teorema1.6.8, aplicado en este caso a A, permite concluir que A tienerango n.
A modo resumen y algunas consecuencias
Las respuestas a las cuestiones planteadas C1-C4 en la página 61 sepueden resumir en el siguiente teorema
Teorema 1.6.13Sea A n × n. Son equivalentes:
(a) rang A = n.
(b) Existe C tal que AC = In.
(c) Existe D tal que DA = In.
(d) La matriz A tiene inversa y A−1 = C = D.
(e) La matriz A se puede escribir como producto de matrices ele-mentales.
Demostración. Que (a) es equivalente a (b) está visto en el Teorema1.6.8. La equivalencia (c) con (a) es el Teorema 1.6.12. Que (d) implica(b) y (c), y por tanto (a) es la propia definición de inversa. Si se tiene
“MatI” — 2018/3/6 — 12:59 — page 75 — #91
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 75
(a), (b) o (c), las dos son equivalentes como hemos visto, entoncesnuevamente aplicando la Proposición 1.6.2 deducimos que C = D =A−1.
Finalmente, si A se puede escribir como producto de matrices ele-mentales, que en particular son invertibles, A es invertible luego te-nemos que (e) implica (d). Recíprocamente, si rang A = n, su formaescalonada reducida es la identidad, luego (como en (1.28))
EM · · · E2E1A = I.
Dado que la inversa de una matriz elemental es de nuevo una matrizelemental, acabamos de verificar que (a) implica (e).
En última medida el Teorema anterior prueba que el Algoritmo 5 fun-ciona, que está bien construido.
Nota 1.6.14Si se reexamina la demostración del Teorema 1.6.13 se observa queel punto complicado es probar la siguiente equivalencia para matricescuadradas:
rang A = n ⇔ Existe D tal que DA = In. (1.29)
Esto es precisamente el Teorema 1.6.12. En particular hemos mostra-do, consecuencia del Teorema 1.6.13 y de (c) en Propiedades 1.6.3,que para matrices cuadradas, rang A� = n si y sólo si rang A = n.
Podemos plantear una demostración alternativa de (1.29) que ob-via el uso de las matrices elementales si damos por cierto el resultado,más fuerte,
rang A = rang A�.
(Esta importante propiedad se probará<en la sección 2.3 del capítu-lo siguiente, concretamente, el Teorema 2.3.2). Esta demostración sepropone en el ejercicio 1.33.
Corolario 1.6.15Si A es triangular inferior (o superior), existe inversa si y sólo si loselementos de la diagonal de A son distintos de cero. Es más, A−1 esigualmente triangular inferior (o superior).
“MatI” — 2018/3/6 — 12:59 — page 76 — #92
76 1.6 Inversa de una matriz
Por último,
A =
a1a2
. . .an
⇒ A−1 =
1a1 1
a2. . .
1an
Demostración. La demostración se deja como ejercicio.
Corolario 1.6.16Si A es invertible, la solución de Ax = b viene dada por
x = A−1b.
Demostración. La propiedad asociativa nos muestra que
A(A−1b) = (AA−1)b = Ib = b,
con lo que se demuestra el resultado. La solución es única porque elrango de A es n.
Nota 1.6.17: Uso práctico de la inversa
Resolver un sistema de ecuaciones lineales Ax = b recurriendo a la in-versa, es decir, calculando A−1b es muy desaconsejable en la práctica.Computar la inversa una matriz por el método de Jordan es un pro-ceso costoso como muestran unos simples cálculos a mano. Ademáses frecuente que aparezcan problemas de diversa índole al manejarlas matrices inversas. Por ejemplo, matrices que pueden estar llenasde ceros tienen inversas sin prácticamente ningún cero (ver Figura1.5). Así, mientras que con la matriz original es posible desarrollarestrategias que explotan convenientemente su estructura (almacena-miento más eficiente, operaciones más rápidas), con su inversa talesestrategias se tornan inútiles. Este tipo de matrices llenas de cerosreciben el nombre de matrices sparse o en castellano, todo sea dichopoco usado, matrices dispersas o matrices huecas. Aparecen en múl-tiples aplicaciones que van desde métodos numéricos para ecuacionesen derivadas parciales a la representación de grafos (véase Proyecto
“MatI” — 2018/3/6 — 12:59 — page 77 — #93
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 77
Figura 1.5: Perfil de una matriz sparse, llena de ceros, y su inversa. Re-presentamos con puntos los elementos no nulos. De esta forma, la matrizoriginal es 337×337. De sus 113 569 entradas, tan solo 2 225, menos del 2 %,son diferentes de cero. Sin embargo, su inversa solo tiene 558 elementos nonulos. Esto es, el 99.5 % de sus elementos son no nulos.
pagerank al final del Capítulo 5, página 368).
1.7. Matrices elementales y factorización LU
Para finalizar este primer capítulo introduciremos la primera descompo-sición o factorización matricial de este texto. Veremos tal factorización comoconsecuencia de representar las operaciones elementales con sus matriceselementales correspondientes.
Proposicion 1.7.1: Factorización LU
Dada A matriz n × n de rango n, entonces se puede reducir a unamatriz escalonada sin permutar filas si y sólo si se puede escribir
A = LU
donde L es una matriz triangular inferior con 1s en la diagonal y Utriangular superior.
“MatI” — 2018/3/6 — 12:59 — page 78 — #94
78 1.7 Matrices elementales y factorización LU
Demostración. Reducir A a su forma escalonada es equivalente ahacer las siguientes operaciones
En,n−1(rn,n−1) · · · E31(r31)E21(r21)A = U.
La matriz U es la forma escalonada obtenida, que por construcciónes triangular superior. Las matrices elementales Ejk(rjk) son matricestodas del tipo (1.23), con j > k y rjk un número apropiado para hacerceros en la posición jk (sólo se ha utilizado la operación elemental 3).Como estas matrices son triangulares inferiores la matriz
T := En,n−1(rn,n−1) · · · E31(r31)E21(r21),
es una matriz triangular inferior (véase (c) en el Ejercicio 1.35). Esfácil además verificar que tiene 1s en la diagonal. Por tanto
TA = U.
Tomamos L = T −1, de nuevo es simple ver que L es triangular con 1sen la diagonal ((b) en Problema 1.35), y llegamos a
A = LU.
El recíproco es cierto. Para ello basta ver que L−1 es triangular inferiorcon 1s en la diagonal, su matriz escalonada reducida es la identidad.Por tanto, L−1 se puede factorizar como producto de matrices elemen-tales del tipo Ejk(r) donde siempre j > k y que por tanto multiplicarpor L−1 es aplicar una serie de operaciones elementales del tipo 3.
Nota 1.7.2: UnicidadNo es difícil probar que para A invertible, la descomposición es única.Es decir, si
L1U1 = A = L2U2
con L1 y L2 triangulares inferiores con 1s en la diagonal, y U1, U2triangulares superiores, entonces
L1 = L2, U1 = U2.
Para ello basta partir de la igualdad
L1(L2)−1 = (U1)−1U2 (1.30)
“MatI” — 2018/3/6 — 12:59 — page 79 — #95
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 79
y comprobar que la matriz de la izquierda es triangular inferior y la dela derecha, triangular superior. Por tanto, L1(L2)−1 = (U1)−1U2 es dehecho diagonal. Utilizando que L1 y L2 tiene la diagonal constituidasúnicamente por 1s, se deduce que el producto en (1.30) ha de ser lamatriz identidad, lo que demuestra el resultado.
Ejemplo 1.7.3: Descomposición LU
Modifiquemos el Ejemplo 1.6.9 ligeramente con
A =
1 1 22 1 31 2 6
.
Entonces
111 1
� �� �E32(1)
11
−1 1
� �� �E31(−1)
1−2 1
1
� �� �E21(−2)
A =
1 1 20 −1 −10 0 3
� �� �U
Por tanto,
L = E21(2)E31(1)E32(−1) =
12 11 −1 1
y
A = LU =
12 11 −1 1
1 1 2−1 −1
3
.
Nota 1.7.4: Sobre el cálculo y el uso de lafactorización LU
Existen diversas formas de calcular dicha factorización. La más simplede todas es la que se deriva de las operaciones realizadas para llevarla matriz a la forma reducida, esto es, de la eliminación gaussiana.
“MatI” — 2018/3/6 — 12:59 — page 80 — #96
80 1.7 Matrices elementales y factorización LU
Observa de nuevo el ejemplo anterior. La matriz L obtenida es
L =
12 11 −1 1
y las operaciones necesarias para reducir la matriz A a la forma redu-cida han sido
A la fila 2 le hemos restado la fila 1 multiplicada por 2 (entrada�21).
A la fila 3 le hemos restado la fila 1 multiplicada por 1 (entrada�31).
A la fila 3 le hemos restado la fila 2 multiplicada por −1 (estoes, hemos sumado la fila 2 a la fila 3) (entrada �32).
Esto no es una casualidad: las entradas de L reflejan las operacio-nes necesarias para reducir la matriz. Una simple modificación delAlgoritmo 5 devuelve un método para calcular la factorización LU .Redactar tal algoritmo se deja como ejercicio.
Por otro lado, si se dispone de esta factorización la resoluciónde sistemas de ecuaciones lineales con A como matriz de coeficientesqueda muy simplificada. En efecto,
Ax = b ⇔�
Ly = b,
Ux = y.
Los sistemas con L y U son triangulares y por tanto muy simples deresolver. El costo de tratar un sistema de esta forma es el mismo queel del método de Gauss dado que la factorización LU no deja de seruna forma diferente de reescribir las operaciones que se utilizan parareducir la matriz de coeficientes a su forma escalonada. Este métodotiene la ventaja evidente, no obstante, de que una vez realizada lafactorización la parte más pesada del cálculo, que conlleva O( 4
3n3)operaciones (sumas y productos), se puede reutilizar para resolvermúltiples sistemas con diferentes términos independientes que quedanreducidos de esta forma a sistemas triangulares, resolución bastantemás económica (O(n2) para cada sistema). Aún es más, existen va-riantes para matrices simétricas que reducen a la mitad el número deoperaciones necesarias para el cálculo de esta factorización si la matrizes simétrica. Veremos una variante con la factorización de Choleskyen el Capítulo 5 (Proposición 5.5.17).
“MatI” — 2018/3/6 — 12:59 — page 81 — #97
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 81
1.8. Algunos apuntes históricos
El origen de los sistemas de ecuaciones lineales se remonta a los iniciosde las propias Matemáticas y va parejo al desarrollo de los sistemas de escri-tura. En las Matemáticas babilónicas pueden encontrarse referencias a estosproblemas. En la literatura china resalta el tratado nueve capítulos del artematemático (siglo II y I a.C.) donde se tratan sistemas de ecuaciones y sepropone como procedimiento para su resolución lo que esencialmente es elmétodo de Gauss. En Europa parece ser que las primeras referencias a laeliminación gaussiana se encuentran en los trabajos de Isaac Newton de for-ma que este método de resolución era bien conocido en Europa a finales delsiglo XVIII. De hecho, Carl Friedrich Gauss nunca propuso este método ensí, aunque sí trabajo con sistemas para ecuaciones normales (que veremos enel Capítulo 3). La denominación actual de método de Gauss o eliminacióngaussiana parece ser producto de una confusión en textos docentes en losaños 50 del siglo pasado.
Representar los coeficientes de un sistema en forma de tabla parece unpaso lógico y así aparece en estos los textos chinos anteriormente referidos.Un asunto más complicado es dotarlo de estructura algebraica (esto es, lasoperaciones que se pueden efectuar con ellas) que es mucho más tardío. Dehecho los determinantes aparecen un siglo antes que las matrices, y éstasse introdujeron para dar un continente a los determinantes. Al parecer, eltérmino “matriz” fue utilizado por primera vez por J.J. Sylvester en 1850.Arthur Cayley, quien conoció a Sylvester cuando estudiaba leyes, fue el pri-mero que se dio cuenta de la importancia de la noción de matriz de formaque en 1853 introdujo por primera vez la inversa de una matriz.
Un lector inquieto puede cuestionar la dificultad o incluso importanciade resolver un sistema de ecuaciones lineales habida cuenta de los problemasmucho más complicados que surgen en el mundo actual. Efectivamente, enteoría, es un problema muy sencillo. Los sistemas lineales tienen ecuacionesmuy simples, sin ninguna operación complicada más allá de las elementa-les (suma, resta, multiplicación y división) y hemos visto que son resolublesutilizando estas mismas operaciones elementales. Nótese no obstante que unordenador en su nivel básico sólo puede ejecutar estas operaciones elemen-tales (y no exactamente: cualquier operación conlleva errores de redondeo).
En problemas realistas, como simulaciones de estructuras, propagaciónde ondas electromagnéticas, problemas de elasticidad, modelización de tiem-po atmosférico,... nos encontramos que los modelos, por muy complicadosque sea, se reduce casi invariantemente a tratar con un sistema o sistemas deecuaciones lineales o, eventualmente, con matrices que recojan propiedades
“MatI” — 2018/3/6 — 12:59 — page 82 — #98
82 1.8 Algunos apuntes históricos
del modelo. Ahora bien, estos sistemas de ecuaciones lineales y/o matricestienen su propia dificultad. La primera, su tamaño: no son extraños sistemascon decenas de millones de ecuaciones con sus incógnitas correspondientes.En segundo lugar, propiedades de las propias matrices. Los problemas degran tamaño sólo comenzaron a tener sentido con la introducción del orde-nador a principios de los años cuarenta del siglo pasado. Hasta entonces, loscálculos habían de ser hechos a manos lo que reducía muy mucho el tamañode los problemas que se podían tratar. Cuando se hizo posible afrontar pro-blemas cada vez más grandes fue esencial disponer de métodos mecanizadosde resolución y manipulación de sistemas. De forma paralela fue necesarioabordar cuestiones no planteadas hasta la fecha.
La factorización LU tiene su origen en este contexto, pero curiosamentedesde una apartado algo más teórico. Uno de los aspectos que se planteócon el advenimiento de las primeras computadoras fue hasta qué punto loserrores de redondeo podrían afectar la solución en sistemas de ecuacioneslineales de gran tamaño14. De hecho los resultados iniciales preveían que laeliminación gaussiana era inestable y que, en suma, nunca podría utilizar-se computacionalmente salvo para matrices de tamaño contenido. En otraspalabras, que el aumento en la potencia y almacenamiento de los primerosordenadores no podría ser aprovechado por este método. Sin embargo, AlanTuring realizó en 1948 un análisis del error de redondeo innovador basadoen reescribir el método de Gauss como una factorización de matrices. Es-ta factorización es precisamente la descomposición LU . Basándose en ella,pudo demostrar que el método, con un pivotaje adecuado, era estable pa-ra matrices grandes siempre que ésta cumpliera ciertas propiedades no muyrestrictivas en la práctica (esencialmente que ni la matriz ni su inversa tu-vieran entradas muy grandes en valor absoluto). El análisis es muy técnicopero cimentó el uso del método de Gauss en la computación moderna y depaso inició una línea de investigación centrada en la estabilidad numérica enel cálculo científico. Aplicaciones de índole más práctica de la factorizaciónLU surgieron posteriormente y son de uso muy frecuente en los paquetes decálculo moderno. Hemos de reseñar, no obstante, que para matrices simé-tricas definidas positivas (véase capítulo 5), Cholesky ya había planteado ytrabajado con la factorización que lleva su nombre y que en cierta forma sepuede considerar un caso particular de la LU .
En la literatura hay decenas de métodos alternativos para resolver lossistemas de ecuaciones lineales. Algunos son métodos directos, como el mé-todo de Gauss y reescrituras apropiadas del mismo. Otros, más elaborados,
14Evidentemente, un sistema de gran tamaño en los 50 del siglo pasado es en la actualidad(2018) prácticamente un problema juguete.
“MatI” — 2018/3/6 — 12:59 — page 83 — #99
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 83
están basados en construir una sucesión de soluciones aproximadas que vanaproximándose a la solución verdadera (métodos iterativos). Todo esto es-capa a los contenidos del curso, pero no dejar de ser sorprendente cuántojuego pueden dar unas simples ecuaciones lineales.
Nota Historica: Alan Turing
Figura 1.6: Alan Turinga los 16 años. Imagen to-mada de la Wikipedia
Alan Turing nació en 1912 en Londres. Con14 años ingresa en el internado de Sherbor-ne. El primer día de clase coincide con unahuelga general en Reino Unido que paralizael transporte pero sus deseos de acudir alcolegio al inicio del curso eran tan intensasque rodó, en bicicleta, 97 kilómetros parapoder asistir. Su interés por las Matemáti-cas y las Ciencias le reportaría, no obstan-te, problemas en el centro más orientadoa una educación clásica (de Letras). En elinternado conocería a Christopher Morcomal que describiría como “su primer amor”.Su relación se rompe súbitamente cuandoChristopher muere en 1930 de tuberculosis.Su homosexualidad le reportaría más pro-blemas en el futuro.
Estudió Matemáticas en la Universidad de Cambridge y desarrollósus primeras teorías sobre máquinas programables, logro importantehabida cuenta que los ordenadores, estamos hablando de 1930s, apenasse atisbaban en un futuro más o menos próximo. Su interés era másbien teórico en aspectos de la lógica y la indecibilidad de las propiasMatemáticas según los trabajos del matemático alemán Kurt Gödel.
La Segunda Guerra Mundial se cruza en su camino y es recluta-do en Bletchley Park como líder en los grupos de descifrado de lasmáquinas enigma utilizados por el ejército alemán. Estos dispositivos,utilizadas para cifrar las comunicaciones, eran similares a voluminosasmáquinas de escribir con una serie de rotores (cinco en las primerasversiones, se añadieron alguno más posteriormente) en su interior. Eloperario tenía que teclear el mensaje y la máquina asignaba a cadaletra otro carácter. Aún es más, esa asignación cambiaba de una for-ma altamente compleja con cada pulsación. El mensaje cifrado eraradiado en morse, y el receptor sólo debía disponer de otra máqui-
“MatI” — 2018/3/6 — 12:59 — page 84 — #100
84 1.8 Algunos apuntes históricos
na donde introducir el texto radiado para decodificar el mensaje. Laposición inicial de los rotores era la que marcaba cómo se llevaba acabo ambas, codificación y decodificación del mensaje y debía coinci-dir en ambas máquinas, la emisora y receptora. Era tal el número decombinaciones, en las primeras versiones ya manejaban más de 1021
configuraciones posibles, que el mando alemán estuvo seguro hasta elfinal de la guerra de que eran indescifrables. Turing y su equipo, uti-lizando resultados previos, que incluyen los estudios del matemáticopolaco Marian Rejewski, algunas máquinas enigmas recuperadas delos alemanes (incluida una de un submarino donde fallaron las cargasde autodemolición y que se hizo creer que estaba hundida), y cier-tos fallos en el protocolo humanoa fue capaz de desarrollar diferentestécnicas estadístico-matemáticas que permitieron romper el (los) có-digos. Hay que tener presente que el sistema de cifrado estaba basadoen la colocación inicial de los rotores en el interior de la máquina, eramodificable y de hecho se cambiaba cada día. Por tanto el procesode “romper el código” (hallar la disposición de esos rotores) debíacomenzar de nuevo cada 24 horas. En esta tarea el grupo de Turingse ayudó de una máquina, Bombe, que se considera precursora de losprimeros ordenadores. El primer ordenador programable, Colossus,fue de hecho construido en Bletcheley Park unos años después, en1943 todavía durante la Segunda Guerra Mundial, y en su diseño haycontribuciones activas de Turing.
La aportación de la gente que trabajó en Bletchley Park, el propioTuring incluido, sólo ha sido reconocido en su justa medida en lasúltimas décadas. En particular, en la victoria en la Batalla del Atlán-tico Norte cuando los submarinos alemanes mermaban los convoyesde abastecimiento (armas, combustible, pero también alimentos) quepartían de Estados Unidos hacia Gran Bretaña y que pusieron en peli-gro la sostenibilidad del país en plena Batalla de Inglaterra. De hecho,el riesgo de colapso del país fue muy real. Romper los códigos permi-tió localizar las “manadas de submarinos” (Rudeltaktik) que estabandiezmando los convoyes y ganar finalmente la batalla. Su contribu-ción fue también importante en poder frenar a Rommel (“el zorro deldesierto”) en la campaña de África. Incluso en el desembarco de Nor-mandía su aportación fue sustancial: los aliados conocían, antes deldesembarco, la posición de 56 de las 58 divisiones del ejército alemán,un logro de la inteligencia militar realmente impresionante.
Las contribuciones de Turing van más allá de las relacionadas con
“MatI” — 2018/3/6 — 12:59 — page 85 — #101
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 85
el esfuerzo bélico, son profusas y se centran en Matemáticas y Compu-tación desde aspectos teóricos a prácticos pasado por filosóficos. Suyoes el conocido “Test de Turing” como forma de verificar la inteligenciaartificial de un ordenadorb.
La vida de Turing concluyó de manera trágica. Condenado en par-te al ostracismo, sus contribuciones en Bletchley Park fueron consi-deradas secreto militar durante décadas, su homosexualidad le hizo“sospechoso” de actividades antipatrióticas. En 1952 es detenido poractitud “indecorosa” con un joven. Sometido a juicio, acepta su cul-pabilidad y a ser tratado hormonalmente para eliminar su comporta-miento “perverso”. Este tratamiento le provoca diferentes afeccionesque le sumen en una depresión. Turing muere en 1954, tras ingeriruna manzana impregnada en cianuro en lo que parece ser un suicidio.
Aunque sus contribuciones fueron siempre reconocidas en el am-biente científico, faltaba un reconocimiento popular de su figura. Unmovimiento para ello empieza a tomar fuerza a finales del siglo pasa-do. Así, la revista Time le elige en 1999 una de las cien personas másimportantes del siglo XX como uno de los fundadores de la cienciacomputacional. En 2009, el entonces primer ministro Gordon Brownpidió perdón de forma pública por el trato inhumano hacia su personaen un artículo de opinión en The Telegraph. Finalmente, en la Navi-dad del 2014 la reina Isabel II firmó el perdón por su condena por“indecencia” tras una campaña por rehabilitar su figura. De formaparalela, ha habido un esfuerzo de recuperar la memoria de BletchleyPark y de las personas que ahí trabajaron. En la actualidad BletchleyPark es un museo donde se pueden contemplar reconstrucciones de lasmáquinas Bombe y Colossus.
aEra conocido que Enigma nunca asignaba una letra a sí misma. En ocasionesse recibieron mensajes largos donde faltaba una letra, por ejemplo la “T”. Así bajola suposición de que el mensaje original era una única letra repetida (por tanto“TTTTTTTT. . . ”) en un mensaje de control, era posible extraer cierta informa-ción a priori sobre la disposición de los rotores. En otras ocasiones se detectaronfrases repetidas en reportes tipo, quizás la más comun “Heil Hitler”. Finalmentealgunas de las operadoras que escuchaban los mensajes, trabajo ímprobo y no su-ficientemente reconocido, eran capaces de reconocer el oficial alemán por la formacon que el mensaje era radiado en código morse, oficiales que tenían sus propiascostumbres a la hora de enviar mensajes, como radiar las mismas frases (“tiemposoleado”, por ejemplo). Todo ello fue de gran utilidad, permitía acotar las posibi-lidades, y vino a alumbrar uno de los puntos débiles de los sistema de cifrado demáxima actualidad hoy en día: el aspecto humano como eslabón débil del sistema.
bBrevemente, la idea básica del test es la siguiente: si tras conversar, anónima-
“MatI” — 2018/3/6 — 12:59 — page 86 — #102
86 1.8 Algunos apuntes históricos
mente, con una máquina y un humano los expertos son incapaces de dilucidar cuál(¿quién?) de ellos es la máquina, tal máquina se puede considerar dotada de inte-ligencia. Esto ha sido tema recurrente en el cine y la literatura. El último ejemploes la fabulosa película “Ex-machina” (2014) que le da una vuelta al test de Turingsituándolo en un plano más emocional.
“MatI” — 2018/3/6 — 12:59 — page 87 — #103
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 87
1.9. Ejercicios
Figura 1.7: Extraído de http://xkcd.com/184/
Sistemas de ecuaciones
1.1 ¿Cuáles de estos sistemas son lineales y cuáles no? ¿Por qué?
(a)�
x + y = 32x − 4y = 1
(b)�
x +√
2y = 3t − z = 1
(c)�
−2x + y = 1x + y2 = 0
(d) x = 8
(e)�
2x − y = 1x + ty = 0
(f) x + y + z + s + t = π
(g) x2 + 4x − 5 = 0
1.2 Resuelve los siguientes sistemas de ecuaciones lineales:
(1)�
x − y = 32x + 4y = 1
(2)
x − y + z = 62x − y − z = 1−x − y + 3z = 10
(3)
x + y + z = 62x − 2y + z = 1x − 3y = 3
“MatI” — 2018/3/6 — 12:59 — page 88 — #104
88 1.9 Ejercicios
(4)
2x − 2y + z = 02x + 4y − 2z = 6
−4x − 2y + z = −6
(5)
3x + 2y + z = 22x + y = 0x − z = −2
− y − 2z = −4
(6)
x − y + z + 3t = 4x − y + 2z + t = 2
2x − 2y + z + 4t = 6x − y + z + t = 2
(7)
2x + z = 2x + 3y − z + t = 1x + y + 3z − t = −3
5x + 8y − 2z + 3t = 6
(8)
x + y + 2z + 2t = 1x − y − 2z + 2t = 0
2x + 4t = 12y + 4z = 1
(9)
−y + 2z − t = −4x + y − z − t = 0x + y + z + t = 2
1.3 Utiliza el método de Gauss-Jordan en los sistemas lineales del problemaanterior.
1.4 Determina el valor de los parámetros para que los sistemas linealestengan solución. ¿Cuáles tienen solución única?
“MatI” — 2018/3/6 — 12:59 — page 89 — #105
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 89
(a)
y − z = 1x + 2y + 3z = b
−x + az = 3
(b)�
x + y + z = bx − ay + 2z = c
(c)
ax + y − z = bx + ay + z = cx + y + az = d
(d)
2x + z = 1x + 4y + z = 2x + y + 6z = 1
ax + y + bz = c
1.5 De un polinomio de grado 3 se sabe que p(−2) = −6, p(0) = 0,p(1) = 0. ¿Puedes encontrar tal polinomio? ¿Y si sabemos que ade-más p(−1) = 0?
1.6 De un polinomio p(x) de grado 3 se sabe que p(0) = 0, p�(0) = 1,p��(0) = 2 y p���(0) = 0. ¿Podrías calcular tal polinomio?
1.7 Conocemos de un polinomio de grado 2 que p(0) = 1 , p(2) = 2 yp�(1) = 0. ¿Podrías calcular ese polinomio? ¿Y si reemplazamos lasegunda condición por p(2) = 1?
1.8 Se propone una fórmula para aproximar la derivada de una función enun punto 0 utilizando la información de tres puntos cercanos. Propo-nemos así
af(−h) + bf(0) + cf(h) ≈ f �(0)
para que sea lo más precisa posible. En principio h es un parámetropequeño.Si exigimos que la fórmula anterior sea exacta para polinomios de gradotodo lo alto que sea posible, ¿qué fórmula obtenemos? ¿Para qué gradoda el valor correcto?¿Podrías adaptar la formula a un punto cualquiera?
1.9 Análogamente, buscamos una fórmula que nos aproxime la integralˆ 1
−1f(t) dt ≈ af(−1) + bf(0) + cf(1).
Para ello, vamos a exigir que la fórmula de el valor correcto para lospolinomios del máximo grado posible. ¿Qué fórmula obtienes? ¿Paraqué polinomios es válida esa fórmula? ¿Podrías adaptar la fórmula paraaproximar integrales sobre intervalos arbitrarios [a, b]?(Ayuda. El cambio de variable x = a+b
2 + t+12 (b − a) transforma [−1, 1] en el
intervalo [a, b]. Observa que este cambio convierte polinomios en la variable
“MatI” — 2018/3/6 — 12:59 — page 90 — #106
90 1.9 Ejercicios
t en polinomios en la variable x con el mismo grado. Observa que ademáspreserva la posición relativa de puntos. Es decir, mapea por ejemplo 0, elpunto medio de [−1, 1] al punto medio de [a, b], (a + b)/2. Estos cambiosde variables se conocen como cambios afines. Con la ayuda de este cambiopuedes trasladar la fórmula diseñada en [−1, 1] a un intervalo arbitrario [a, b])
1.10 Si planteamos el problema (sólo plantear) de buscar una fórmula deforma que
ˆ 1
−1f(t) dt ≈ af(x1) + bf(x2).
devuelve el resultado correcto para f un polinomio de grado lo másalto posible, ¿qué tipo de sistema estás resolviendo?
1.11 Determina, si es posible, los valores de a y b para que los tres planossiguientes se corten dos a dos pero no determinen ni un punto ni unarecta.
x + y + z = 1, ax + y + az = 0, x + by + z = 2
Matrices
1.12 De las siguientes matrices, ¿cuáles se pueden multiplicar y en qué or-den?
(a) A =�−1 2
3 1
�,
B =�0 11 0
�.
(b) A =�0 1 3
�, B =
�12
�.
(c) A =
0 1 −2 01 0 1 12 −1 4 2
.
B =
−1 −1 02 0 21 0 10 1 −1
.
(d) A =�1 2 3 4
�,
B =
1−1
2−2
.
(e) A =�−1 0
1 3
�,
B =
1 2 3−1 0 1
0 −2 −4
.
(f) A =
−1 22 1
−1 11 1
B =
�1 11 1
�.
“MatI” — 2018/3/6 — 12:59 — page 91 — #107
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 91
1.13 Calcula, si existe, la inversa de las siguientes matrices
(a)�2 11 2
�.
(b)
2 1 01 −1 2
−1 2 −3
.
(c)
0 1/2 1/21/2 0 1/21/2 1/2 0
.
(d)
1 2 34 5 67 8 9
(e)
7/9 −4/9 −4/9−4/9 1/9 −8/9−4/9 −8/9 1/9
(f)�2�
(g)
1/2 1/2 −1/2 1/21/2 1/2 1/2 −1/2
−1/2 1/2 1/2 1/21/2 −1/2 1/2 1/2
(h)
1 2 2 12 −1 −1 2
−1 3 5 72 4 6 10
(i)
−2 1 0 11 −2 1 00 1 −2 11 0 1 −2
(j)
−1/4 5/4 7/4 −3/4−3/4 −1/4 5/4 7/4
7/4 −3/4 −1/4 5/45/4 7/4 −3/4 −1/4
(k)
2 1 0 0 11 2 1 0 00 1 2 1 00 0 1 2 11 0 0 1 2
(l)
−2 1 0 01 −2 1 00 1 −2 10 0 1 −2
.
1.14 Sea
A =
−1 12 −11 3
.
Encuentra, si existen, C, D tal que CA = I2 y AD = I3.
1.15 Encuentra una matriz A tal que
A
�1 −11 1
�=
4 −60 22 0
.
“MatI” — 2018/3/6 — 12:59 — page 92 — #108
92 1.9 Ejercicios
1.16 Sea la matriz
A =
−2 1 1−1 −2 1−4 1 2
.
Busca matrices B que satisfagan las siguientes identidades:
(a) A2 − AB = I
(b) ABA = A
(c) (I − A)(I − B) = I
1.17 Encuentra A tal que
A
0 1 2−1 2 −2−3 7 −2
=
�1 −2 1
�.
1.18 Dada las matrices
A =�
1 1−1 1
�, B =
�0 −11 1
�, C =
1 −2 −2−2 1 −2−2 −2 1
,
calcula An, Bn y Cn.
1.19 ¿Para qué valores de a, son las matrices
1 −1 02 a 1
−1 2 1
,
a −0 a0 1 11 −1 1
,
invertibles?
1.20 Sea
A =
0 2 1−1 0 1
1 2 0
.
Se sabe que existen tres vectores u, v, w ∈ R3 tal que
Au = −u, Av = 0, Aw = w.
¿Podrías encontrar estos vectores? ¿Son únicos? Construye la matriz
P =�
u v w�
.
“MatI” — 2018/3/6 — 12:59 — page 93 — #109
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 93
Verifica que P es invertible. Calcula AP y P −1AP . Utilizando esteresultado, ¿podrías calcular A25 y A50? 15.
1.21 Dada una matriz cuadrada genérica�a bc d
�,
¿bajo qué condiciones existe la inversa? ¿Podrías dar una fórmula parala inversa?
1.22 Prueba que si A�A = 0, entonces A = 0.(Ayuda. Sea C = A�A y examina los elementos de la diagonal cii. Pruebaque si cii = 0 entonces la columna iésima de A es cero. Deduce ahora elresultado.)
Ejercicios (semi)teóricos
1.23 Se define el producto vectorial de dos vectores u, v ∈ R3 como elvector
u × v = (u2v3 − u3v2, u3v1 − u1v3, u1v2 − u2v1).
Se pide:
Demostrad que:(a) el producto vectorial es bilineal:
u × (v + w) = u × v + u × w, u × (λv) = λ(u × v),(v + w) × u = v × u + w × u, (λv) × u = λ(v × u);
(b) y anticonmutativo
u × v = −v × u.
En particular, u × u = 0.Probad que
(u × v) · u = (u × v) · v = 0
(“·” denota aquí el producto escalar). Por tanto, u×v es un vectorque apunta en la dirección ortogonal que marcan u y v.
15Éste es el primer ejemplo de un problema de valores y vectores propios. Este apartadose desarrollará en propiedad en el Capítulo 5.
“MatI” — 2018/3/6 — 12:59 — page 94 — #110
94 1.9 Ejercicios
Verificad que
�u × v�2 = �u��v�2 − (u · v)2.
y que por tanto
�u × v� = �u��v�| sin θ|donde θ es el ángulo entre los dos vectores u y v
1.24 Es posible definir una norma sobre las matrices de acuerdo a las Pro-piedades 1.3.7. Esto es, una aplicación que a cada matriz le asocia unnúmero
�A�que cumple las Propiedades 1.3.7, esto es,
(a) Positividad: �A� ≥ 0 y �A� = 0 si y sólo si A = 0.(b) Homogeneidad: �λA� = |λ|�A�.(c) Desigualdad triangular �A + B� ≤ �A� + �B�.
He aquí algunos ejemplos
�A�1 := maxj=1,...,n
|a1j | + |a2j | + . . . + |amj |.
�A�∞ := �A��1 = maxi=1,...,m
|ai1| + |ai2| + . . . + |ain|.
�A�F :=� n�
i=1
m�
j=1|aij |2
�1/2.
Probad que efectivamente las tres definiciones anteriores definen unanorma. Demostrad que
�A�2F = Tr(A�A) = Tr(AA�).
Prueba además que (véase Nota 1.3.8)
�Au�1 ≤ �A�1�u�1, �Av�∞ ≤ �A�∞�v�∞, (1.31)para cualquier u, v y que existen elecciones adecuadas, para cada ma-triz, de u y v para los que las desigualdades anteriores se transformanen identidades.(Nota. Una expresión similar para la norma euclídea, es decir, una norma�A�2 tal que
�Aw� ≤ �A�2�w�existe, y que de hecho puede ser una igualdad, pero es más complicada (veáseLema A.2.6). Hay una forma de definirla de forma indirecta que está indicadaen el Ejercicio 1.26. )
“MatI” — 2018/3/6 — 12:59 — page 95 — #111
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 95
1.25 Calcula la norma �A�1, �A�∞ y �A�F para las siguientes matrices
A =�
1 2−2 3
�, A =
�1 2 40 −1 2
�, A =
2 1 −11 3 2
−1 2 4
.
¿Es esperable que �A�1 = �A�∞ para las matrices simétricas? ¿Y lasantisimétricas?
1.26 Enlazando con el problema anterior, cualquier norma vectorial induceuna norma matricial en el siguiente sentido: sea � ·�X una norma sobrelos vectores en Rn. Definimos sobre el conjunto de matrices m×n (portanto, no necesariamente cuadradas),
�A�X := max0�=w∈Rn
�Aw�X
�w�X= max
w∈Rn
�w�X =1
�Aw�X .
Se pide:
(a) Que las dos definiciones de la norma �A�X dadas arriba son equi-valentes.
(b) Probad que �A� verifica las tres propiedades listadas en Propie-dades 1.3.7.
(c) Demostrad que para cualquier norma inducida �I�X = 1, queestas normas verifican
�AB�X ≤ �A�X�B�X
y que en particular
�A�X < 1 ⇒ An → 0, cuando n → ∞.
(d) Deducid que las normas vectoriales � · �1 y � · �∞ inducen lasnormas matriciales correspondientes. (Véase (1.31)).
(e) Deducid que la norma de Frobenius no es una norma inducidapor ninguna norma vectorial.(Ayuda. ¿Cuánto vale �In�F ?)
(Nota. Una cuestión nada trivial es ver que la definición de �A�X está bienconstruida, es decir, que hay un máximo, y no es un supremo. Evitaremosentrar en estos detalles.)
“MatI” — 2018/3/6 — 12:59 — page 96 — #112
96 1.9 Ejercicios
1.27 Demuestra que cualquier matriz cuadrada es suma de una matrizsimétrica y otra antisimétrica. Prueba que tal descomposición es única.
1.28 Prueba que si dos matrices A y B m × n cumplen que Au = Bu paracualquier vector u ∈ Rn entonces A = B.
1.29 ¿Qué matrices A 2 × 2 conmutan con el resto de matrices cuadradasde orden 2? Es decir, ¿Qué matrices A 2 × 2 cumplen
AB = BA
para cualquier matriz B de tamaño 2 × 2?
¿Te atreverías a extender este resultado para matrices de orden mayoro igual que 2?(Ayuda: Si A conmuta con cualquier matriz cuadrada, en particular debe
conmutar con�1 00 0
�. ¿Qué información puedes sacar de esta propiedad?
Escogiendo otras matrices B de forma adecuada puedes deducir la forma queha de tener A. El caso general, matrices A n × n que conmutan con cualquiermatriz cuadrada de orden n, se sigue con argumentos similares.)
1.30 Sea
C(θ) =�
cos θ sen θ− sen θ cos θ
�
Demuestra que
(a) C−1(θ) = C�(θ) = C(−θ).
(b) C(θ)C(ϕ) = C(θ + ϕ).
(c) Para todo v ∈ R2, �C(θ)v� = �v�.
(d) v · C(θ)v = �v�2 cos θ.
En vista de las propiedades anteriores, ¿qué crees que hace sobre losvectores de R2 el producto por C(θ)?(Ayuda. Echa un vistazo a la Figura 1.7 que encabeza el listado actual deproblemas).
1.31 Consideremos la siguiente generalización del problema anterior. Sean
“MatI” — 2018/3/6 — 12:59 — page 97 — #113
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 97
−50
5
−50
5−5
0
5
−50
5
−5
0
5−4−2
024
−50
5
−5
0
5−4−2
024
−50
5
−50
5−5
0
5
−50
5
−5
0
5−4−2
024
−50
5
−5
0
5−4−2
024
Figura 1.8: Mismas rotaciones en el espacio, pero en diferente orden
las matrices
Z(θ) :=
cos θ sen θ− sen θ cos θ
1
, Y (θ) :=
cos θ sen θ1
− sen θ cos θ
X(θ) :=
1cos θ sen θ
− sen θ cos θ
Entonces
¿Qué hacen, geométricamente, sobre puntos (o vectores) de R3,el producto por las matrices X(θ), Y (θ) y Z(θ)?Geométricamente, ¿qué crees que quiere decir que, por ejemplo,Z(π/2)Y (π/2) �= Y (π/2)Z(π/2)?
En vista del último punto, concluye que la pérdida de la propiedadconmutativa del producto matricial es esperable para una operacióncomo ésta. (Ayuda: observa la Figura 1.8)
1.32 Probad que si A y B son matrices cuadradas, y AB es invertible, en-tonces también son invertibles A y B. ¿Es cierto la afirmación anteriorsi eliminamos la restricción de que A y B sean cuadradas?
1.33 En este ejercicio proponemos una demostración alternativa al Teorema1.6.12. Supongamos probado el siguiente (importante) resultado.
rang A = rang A�.
“MatI” — 2018/3/6 — 12:59 — page 98 — #114
98 1.9 Ejercicios
(este resultado lo enunciaremos en el Teorema 2.3.2). Nuestro objetivoes probar que si A es cuadrada, existe inversa si y sólo si rang A = n.Sea por tanto A n × n de rango n. Entonces se pide:
(a) Probad que existen dos matrices C, D tales que
AC = A�D = I
(Ayuda: utilizad el Teorema 1.6.8 a A y A�)(b) Deducid que
D = C�
(Ayuda: Proposición 1.6.2)(c) Concluid que para una matriz cuadrada de rango n, AC = I si y
sólo si CA = I y por tanto C = A−1.
1.34 Contesta si las siguientes afirmaciones son verdaderas o falsas, y porqué:
(a) (A + B)(A − B) = A2 − B2 si y sólo si AB = BA.(b) Si A, B son invertibles, también lo es A + B.(c) Si A es una matriz tal que A2 = I (I es la matriz identidad),
entonces A = I.(d) Si A es tal que A2 = I, entonces A es diagonal con 1s o −1s en
la diagonal.
1.35 En este ejercicio exploramos las propiedades de las matrices triangu-lares cuadradas.
(a) Si L es una matriz triangular (superior o inferior), ¿qué debecumplir para que sea invertible?
(b) Si la inversa de una matriz triangular existe, ¿qué forma tieneL−1? ¿Y qué relación hay entre las diagonales de L y L−1?
(c) Si L1 y L2 son triangulares, superior o inferior ambas dos, probarque el producto de L1L2 es también triangular, superior o inferiorrespectivamente.
1.36 Diseña un algoritmo para calcular la factorización LU de una matriz.Téstalo con las matrices
1 −1 2−1 3 −1−2 4 −3
,
1 2 −1 22 6 −2 6
−1 −2 −5 12 6 1 9
.
“MatI” — 2018/3/6 — 12:59 — page 99 — #115
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 99
(Ayuda. Ver la Nota 1.7.4.)
1.37 Supongamos que podemos factorizar una matriz cuadrada en la formaA = LU . Probad que si A es simétrica entonces
A = LDL�
donde D es una matriz diagonal y L es una matriz triangular inferiorcon 1s en la diagonal. Demuestra que esta descomposición es única.Calcula esta descomposición para la segunda matriz del problema an-terior.(Ayuda. Si D es la matriz diagonal con uii como entradas en la diagonal. Esfácil ver que D−1U tiene 1s en la diagonal.)
1.38 Probad que las matrices
�0 11 2
�,
1 2 31 2 4
−1 −1 −3
,
1 −1 2 12 −1 7 31 0 5 51 −2 0 −5
no admiten la descomposición LU , aun cuando las matrices anteriorestienen todas rango máximo. Probad que sí la admiten
�1 20 1
�,
1 2 3−1 −1 −3
1 2 4
,
1 −1 2 12 −1 7 31 −2 0 −51 0 5 5
.
Probad que en el caso general, si A es cuadrada y tiene rango máximo(invertible) existe una matriz P que es el resultado de reordenar lasfilas (o columnas) de la matriz identidad de forma que
PA = LU.
(Ayuda. Que la factorización A = LU no exista indica que para reducirla asu forma escalonada hay que recurrir al pivotaje porque algún pivote es cero.Apunta los cambios de fila necesarios. Si estos cambios se hacen al principio,la nueva matriz �A sí se puede reducir a su forma escalonada sin recurrira permutaciones de filas puesto que ya se han hecho. Por tanto, sí se puedefactorizar �A = LU . Ahora, ¿Cómo se puede escribir la relación entre la matrizoriginal A y �A?)
“MatI” — 2018/3/6 — 12:59 — page 100 — #116
100 1.9 Ejercicios
1.39 Recordemos que una matriz A n × n se dice nilpotente si existe mtal que Am = 0 (la matriz nula; véase Ejemplo 1.4.23.) El número mrecibe el nombre de índice de nilpotencia.Se pide:
(a) mostrad algún ejemplo de matrices nilpotentes 2 × 2 y 3 × 3;(b) probad que si aij = 0 con i ≥ j entonces A es nilpotente.(c) probad que si A es nilpotente entonces A es singular;(d) demostrad que si A es nilpotente I − A es invertible;
(Ayuda: Multiplica por la matriz I + A + A2 + . . . + Am−1.)
1.40 Una matrix 4 × 4 se dice circulante si tiene la siguiente forma
a0 a1 a2 a4a4 a0 a1 a2a3 a4 a0 a1a2 a3 a4 a0
Probad que si A y B son circulantes, también son circulantes A� yA−1 y AB. Comprueba estos resultados con la matriz de las cuestiones1.13(i), 1.13(j) y 1.13(k).Define las matrices circulantes n × n. Demostrad que las propiedadesanteriores son ciertas para el caso general n. Discute sobre las necesida-des de memoria para almacenar una matriz circulante en un ordenadory cuántas operaciones (aproximadamente) se necesitan para calcularel producto de dos matrices circulantes y la inversa de una matrizcirculante.
1.41 Sea u ∈ Rn tal que u�u = �u�2 = 1 (vector normalizado). Definimosla matriz
H = In − 2uu�
(In es la matriz identidad; el vector u se entiende, como es habitual,como un vector columna, esto es, u es n × 1). Se pide probar que:
(a) H es simétrica.(b) H2 = In.(c) H es invertible.(d) Hu = −u, si v�u = 0, entonces Hv = v.(e) Construir H para u =
�1/
√3, 1/
√3, −1/
√3�
y verificar las pro-piedades anteriores.
“MatI” — 2018/3/6 — 12:59 — page 101 — #117
CAPÍTULO 1. Sistemas Lineales. Matrices y su álgebra 101
Estas matrices se conocen como matrices de Householder o matricesde reflexión.







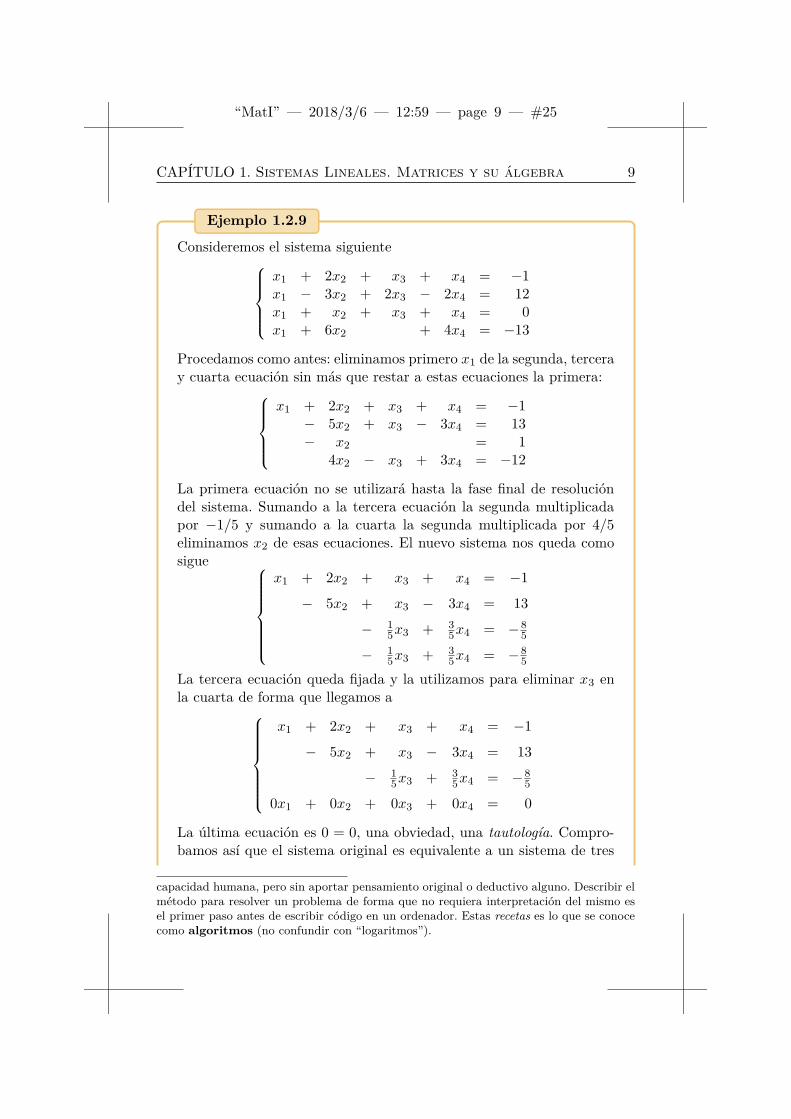





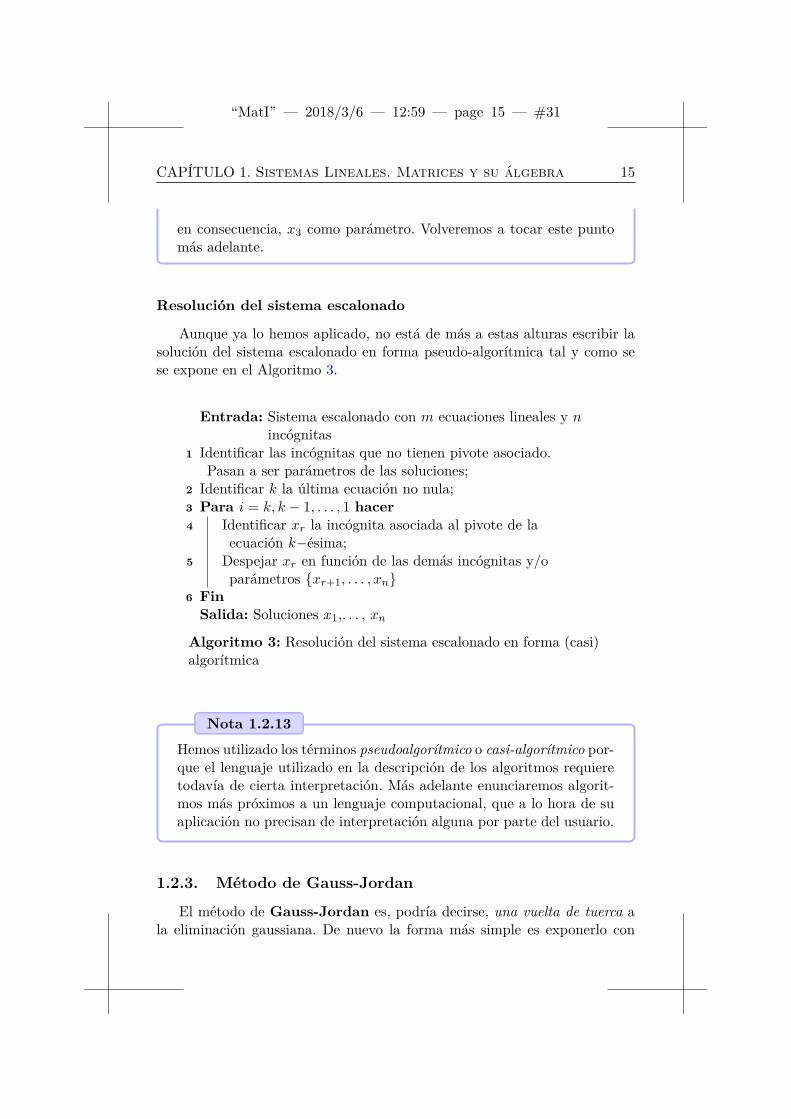









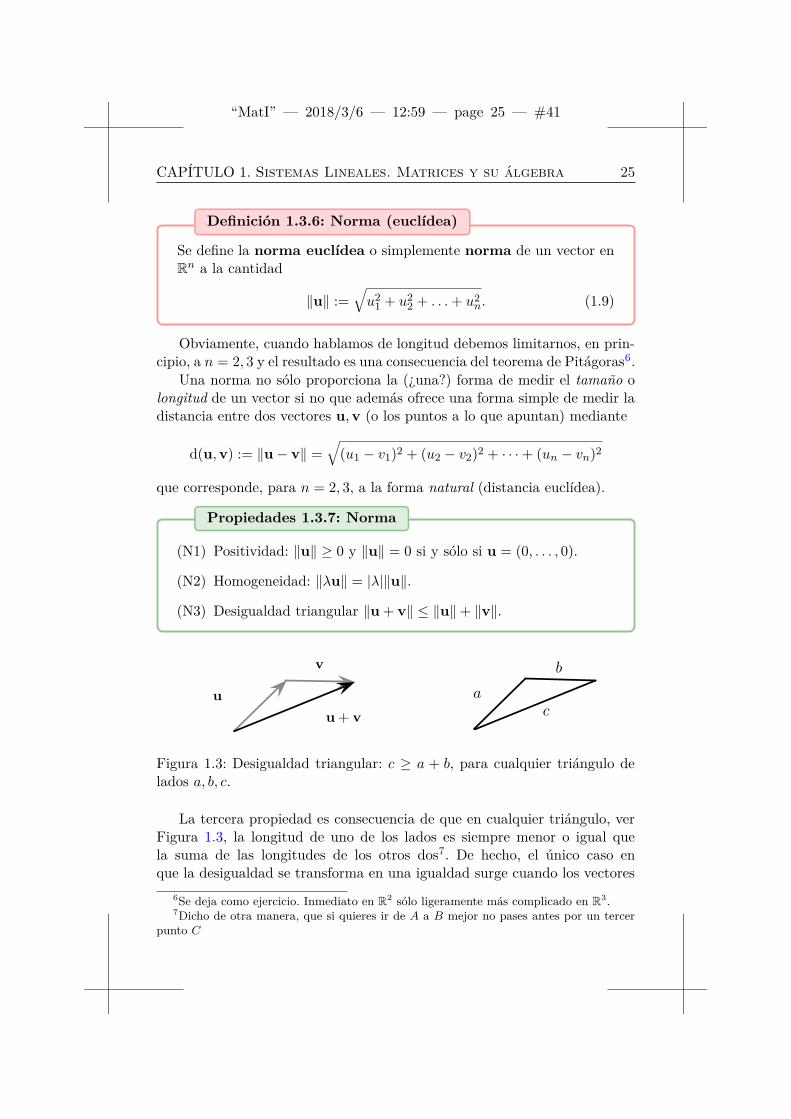







































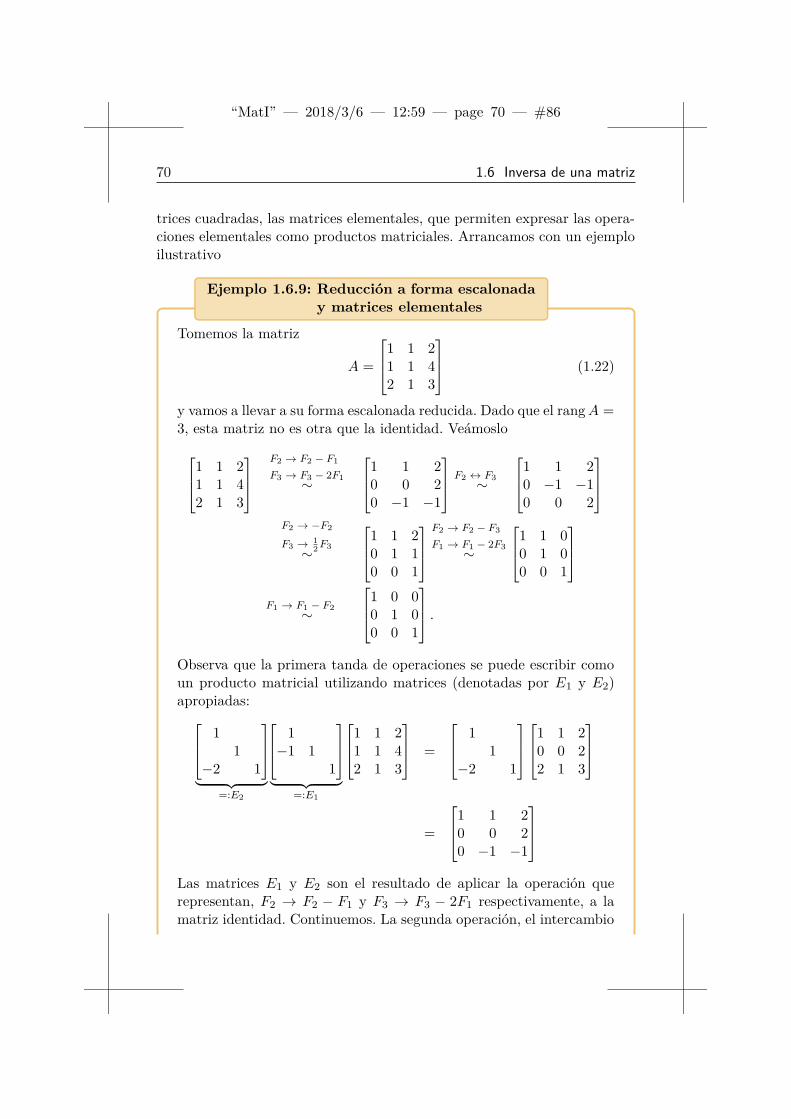














































![[PPT]Tema 2.- MATRICES - Open Course Ware Moodle 2.5 · Web viewMATRICES PRODUCTO DE MATRICES POTENCIAS NATURALES DE MATRICES CUADRADAS MATRICES SUMA DE MATRICES. PRODUCTO DE UN ESCALAR](https://static.documents.pub/doc/80x56/5c17a16c09d3f2c7368c2ad2/ppttema-2-matrices-open-course-ware-moodle-25-web-viewmatrices-producto.jpg)
