SM103 SLAMWARE SDP Mini User Manual On this page, we will introduce the SDP Mini and its specification, related tools and other development resources. On this page Introduction Overview Key components SLAMWARE Core SLAMWARE Breakout 3.0 RPLIDAR A2 Motor Specification Tools and usage Tools with GUI Robot Studio SLAMWARE Web Portal Mobile application Other tools Slamware Console slamware_config_tool Reference Ctrl Bus SDK API Reference Mechanical dimensions FAQ Definition of indicators Model Definition Unbinding SDP Mini and reset WiFi Related pages Introduction Overview The SDP Mini is a small-size development platform designed by SLAMTEC for evaluating the performance of modular autonomous robot localization and navigation solution(SLAMWARE solution for short). It is assembled by key components including SLAMWARE Core, RPLIDAR A2 and Breakout 3.0 board, and requires only 8 AA batteries to run well without concerns about batteries and charging. The SDK of SDP Mini, supported to run in Windows/Linux/IOS and Android environment, integrates the whole SLAMWARE solution and extra reserved sensor interfaces. With SDP Mini, users can have a general understanding about the SLAMWARE solution and examine its basic performance. Run as the most compact structure which realizes the basic SLAMWARE solution, it is suitable for the preliminary evaluation of SLAMWARE solution or the development of robots with basic needs for localization and navigation function. Key components
Transcript
SM103 SLAMWARE SDP Mini User Manual
On this page, we will introduce the SDP Mini and its specification, related tools and other development resources.
On this pageIntroduction
OverviewKey components
SLAMWARE CoreSLAMWARE Breakout 3.0RPLIDAR A2Motor
SpecificationTools and usage
Tools with GUIRobot StudioSLAMWARE Web PortalMobile application
Other toolsSlamware Consoleslamware_config_tool
ReferenceCtrl BusSDK API Reference
Mechanical dimensionsFAQ
Definition of indicatorsModel DefinitionUnbinding SDP Mini and reset WiFi
Related pages
Introduction
Overview
The SDP Mini is a small-size development platform designed by SLAMTEC for evaluating the performance of modular autonomous robotlocalization and navigation solution(SLAMWARE solution for short).
It is assembled by key components including SLAMWARE Core, RPLIDAR A2 and Breakout 3.0 board, and requires only 8 AA batteries to run wellwithout concerns about batteries and charging.
The SDK of SDP Mini, supported to run in Windows/Linux/IOS and Android environment, integrates the whole SLAMWARE solution and extrareserved sensor interfaces.
With SDP Mini, users can have a general understanding about the SLAMWARE solution and examine its basic performance. Run as the mostcompact structure which realizes the basic SLAMWARE solution, it is suitable for the preliminary evaluation of SLAMWARE solution or thedevelopment of robots with basic needs for localization and navigation function.
Key components
SLAMWARE Core
It provides autonomous localization and navigation based on RPLIDAR and supports for communicating the navigation information via serial portand Ethernet bus.
For detailed specification, please refer to .SD001 SLAMWARE Core 数据手册
SLAMWARE Breakout 3.0
As a shield for SLAMWARE Core, it provides the interfaces that can connect directly to RPLIDAR, network, PC, motor and varies sensors, whichfacilitates the software and hardware development based on the SLAMWARE Core.
RPLIDAR A2
It performs 2D 360-degree LIDAR scan in a range, and the generated 2D point cloud data can be used in mapping, localization andobject/environment modeling. In SDP Mini, it provides raw data of the environment for SLAMWARE Core to analyze and handle.
Motor
The brush motor, with a simple schematic diagram, realizes the moving function of SAMWARE solution in SDP Mini, and it is easy to launch,control or improve.
It is a tool with graphical user interface for connecting to SLAMTEC devices. With this tool, users can control and debug SDP Mini in mapping,moving and other operations.
Please refer to for the detailed function description.S002 Robot Studio User Manual
SLAMWARE Web Portal
SLAMTEC has designed a web portal tool to provide general operations for SLAMWARE devices during the developing, debugging and usingprocess. With this tool, users can check the basic information of SLAMWARE Core, update firmware, configure WiFi and diagnose the robotvisually.
Currently supported operations are as below:
Check the device informationRestart moduleUpdate firmwareConfigure WiFiTurn on SLAMWARE Core diagnose modeModify the password for administrator
Please check for detailed usage.SQ001 SLAMWARE Web Portal Function Overview
SLAMTEC has designed mobile application for SDP Mini. It covers the basic moving control, localization and navigation function. After binding thedevice to the mobile phone, users can control the SDP Mini successfully.
Other tools
Slamware Console
Slamware Console is a development tool for SLAMWARE SDK. It is used for debugging the implementation of Control Bus protocol, checking thesensor status configured in the base and the data of odometer and wheels. For details, please refer to .SA001 Slamware Console Application Note
slamware_config_tool
slamware_config_tool is a base configuration tool that can set the base diameter, the wheel base and the charging mode. For details, please referto .SA004 机器人底盘传感器位置坐标及底盘配置工具的使用
Reference
Ctrl Bus
For how to realize the communication between SLAMTEC base with user's system, please refer to .SR001 SLAMWARE Control Bus 通讯协议
SDK API Reference
For API reference of SLAMWARE SDK on Windows platform, please refer to ; SLAMWARE SDK API Reference(Windows)
For the introduction of the map data type and coordinate system in SLAMWARE SDK, please refer to SA002 Introduction for Coordinate System;and Map Data in SLAMWARE SDK
For the introduction of odometer of base, its usage and related code, please refer to SA003;基于Slamware解决方案的服务型机器人底盘电机里程计概述及代码示例
For how to control the moving and check the return status of robot with SLAMWARE SDK, please refer to SA006 使用Slamware.SDK实现机器人的运动控制及其返回状态判断
Mechanical dimensions
The application in ios version is supported to run on and over ios 9.0; the one in android version is supported to run on and overandroid 4.4.
indicator on SLAMWARE Core light up green power on SLAMWARE Core
U6 light up and flash in blue color during launching
light up blue launch successfully
flash yellow color battery lower than 30%
flash in red color battery lower than 15%
Model Definition
Product SLAMWARE SDP Mini
Model A1M1-R1
MajorComponents
SLAMWARE Core Lite Module (Model: B1M4, please refer to forSD002 SLAMWARE Core Model Definitiondetails.)
RPLIDAR A2 Laser Range Scanner
SLAMWARE Core Breakout 3.0
two-wheeled differential drive motor
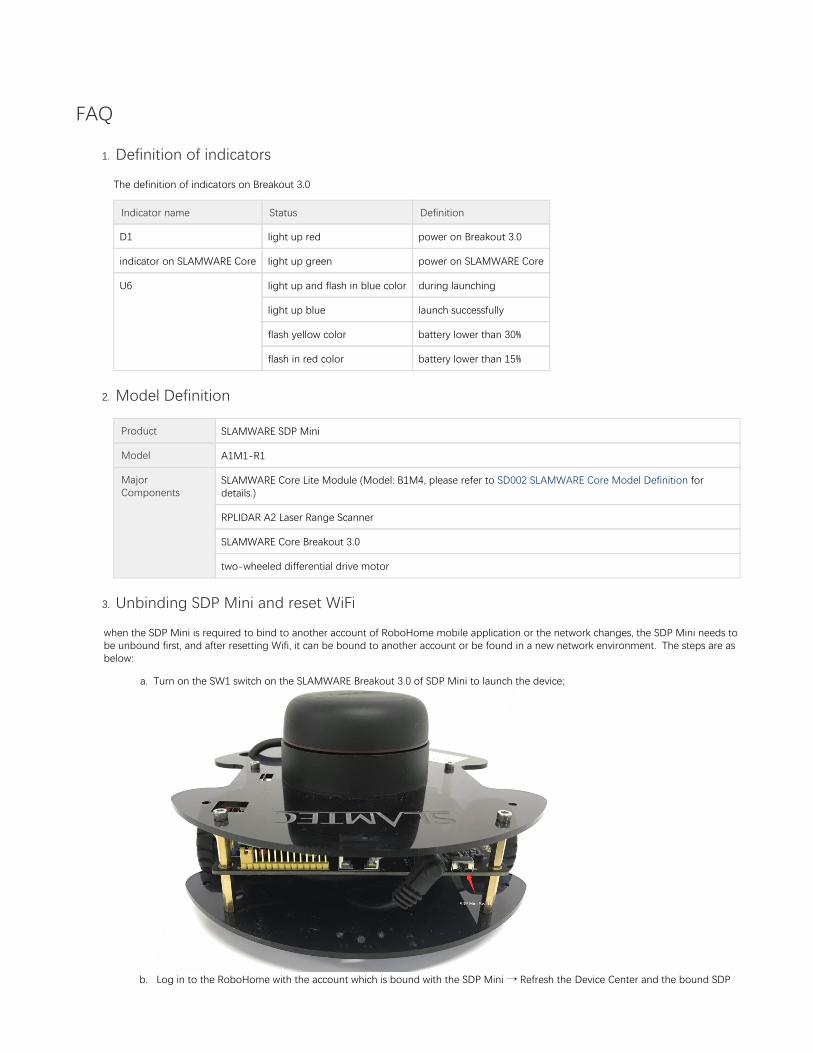
Unbinding SDP Mini and reset WiFi
when the SDP Mini is required to bind to another account of RoboHome mobile application or the network changes, the SDP Mini needs tobe unbound first, and after resetting Wifi, it can be bound to another account or be found in a new network environment. The steps are asbelow:
Turn on the SW1 switch on the SLAMWARE Breakout 3.0 of SDP Mini to launch the device;
Log in to the RoboHome with the account which is bound with the SDP Mini → Refresh the and the bound SDPDevice Center
Mini will be online→ Click in the upper right corner to enter editing mode→ Click the crash bin icon in the right of the SDPEditmini → Click in the dialog box.Yes, delete
When the network changes, follow the following steps to switch the Station mode back to AP mode so that we can reassign theip address:
As shown below, remove the jumper in J22 on Breakout 3.0 board of SDP Mini and put it on the GND pin and RX2 pinof the same interface, then restart the SDP Mini. (Except for the buzz of normal launch, the SDP Mini will emit a longerbuzz to indicate a successful WiFi reset. )
After launching the SDP Mini, connect it to the computer with network cable, and then login to 192.168.11.1 in Chrome(). Go to on the upper right corner of the page →Default username: admin; default password: admin111 Administration
choose on the left panel → choose button in the bottom of the page.Configure WiFi Restore
After resetting, please turn the switch off and put the jumper back to normal state to ensure that the SDPMini will work well later.
ii.
Related pagesIf you are a new comer for SLAMTEC products, please turn to first;SQ103 SLAMWARE SDP Mini 快速启动指南