265
Álgebra Linear I Sonia Elena Palomino Castro Bean Daniel Noberto Kozakevich Florianópolis, 2008
| Date post: | 10-Nov-2018 |
| Category: |
Documents |
| Upload: | truongdang |
| View: | 214 times |
| Download: | 0 times |

Álgebra Linear I
Sonia Elena Palomino Castro BeanDaniel Noberto Kozakevich
Florianópolis, 2008


Universidade Federal de Santa CatarinaConsórcio ReDiSul
Campus Universitário – Trindade
Caixa Postal 476
CEP 88040-900 – Florianópolis – SC
Reitor: Alvaro Toubes Prata
Vice-Reitor: Carlos Alberto Justo da Silva
Secretário de Educação a Distância: Cícero Barbosa
Pró-Reitoria de Ensino de Graduação: Yara Maria Rauh Muller
Departamento de Educação à Distância: Araci Hack Catapan
Pró-Reitoria de Pesquisa e Extensão: Débora Peres Menezes
Pró-Reitoria de Pós-Graduação: José Roberto O’Shea
Pró-Reitor de Desenvolvimento Humano e Social: Luiz Henrique Vieira Silva
Pró-Reitor de Infra-Estrutura: João Batista Furtuoso
Pró-Reitor de Assuntos Estudantis: Cláudio José Amante
Centro de Ciências da Educação: Carlos Alberto Marques
Centro de Ciências Físicas e Matemáticas: Méricles Thadeu Moretti
Centro de Filosofia e Ciências Humanas: Maria Juracy Filgueiras Toneli
Cursos de Licenciaturas na Modalidade à DistânciaCoordenação Acadêmica Matemática: Neri Terezinha Both Carvalho
Coordenação de Ambientes Virtuais: Nereu Estanislau Burin
Coordenação de Infra-Estrutura e Pólos: Vladimir Arthur Fey
Comissão EditorialAntônio Carlos Gardel Leitão
Albertina Zatelli
Elisa Zunko Toma
Igor Mozolevski
Luiz Augusto Saeger
Roberto Corrêa da Silva
Ruy Coimbra Charão
Coordenação Pedagógica das Licenciaturas à Distância UFSC/CED/CFMCoordenação: Roseli Zen Cerny
Núcleo de Formação
Responsável: Nilza Godoy Gomes
Núcleo de Criação e Desenvolvimento de Material
Responsável: Isabella Benfica Barbosa
Design Gráfico e Editorial: Carlos A. Ramirez Righi, Diogo Henrique Ropelato,
Mariana da Silva.
Adaptação Design Gráfico: Diogo Henrique Ropelato,
Marta Cristina Goulart Braga, Natal Anacleto Chicca Junior.
Produção Gráfica e Hipermídia: Thiago Rocha Oliveira
Design Instrucional: Gislaine Teixeira Borges Guérios
Revisão Ortográfica: Christiane Maria Nunes de Souza, Gustavo Andrade
Nunes Freire
Preparação de Gráficos: Gabriela Dal Toé Fortuna
Editoração Eletrônica: Laura Martins Rodrigues, Flaviza Righeto
Núcleo de Pesquisa e Avaliação
Responsável: Claudia Regina Flores
Copyright © 2008, Universidade Federal de Santa Catarina / Consórcio RediSul
Nenhuma parte deste material poderá ser reproduzida, transmitida e gravada, por qualquer
meio eletrônico, por fotocópia e outros, sem a prévia autorização, por escrito, da Coordenação
Acadêmica do Curso de Licenciatura em Matemática na Modalidade à Distância.
Ficha Catalográfica
K88a Kozakevich, Daniel Álgebra Linear I / Daniel Norberto Kozakevich, Sonia Elena Palo-mino Castro Bean. - Florianópolis : UFSC/EAD/CED/CFM, 2008. 200p. ISBN 978-85-99379-50-9 1. Álgebra linear. I. Bean, Sonia Elena P. Castro. II. Título. CDU 512.64
Elaborada pela Bibliotecária Eleonora M. F. Vieira – CRB – 14/786

Sumário
1 Matrizes .................................................................................. 91.1 Matriz ........................................................................................... 111.2 Tipos de Matrizes ....................................................................... 161.3 Operações com Matrizes ........................................................... 241.4 Determinantes ............................................................................ 401.5 Matriz Adjunta: Adj (A) .............................................................. 501.6 Inversa de uma Matriz .............................................................. 53Exercícios Propostos ........................................................................... 68
Resumo ............................................................................................... 70
Bibliografia Comentada ....................................................................... 72
2 Sistemas Lineares ................................................................ 732.1 Preliminares ................................................................................ 752.2 Sistemas Lineares ....................................................................... 812.3 Decomposição LU .................................................................... 108Exercícios Propostos ......................................................................... 113
Resumo ..............................................................................................114
Bibliografia Comentada ......................................................................114
3 Espaços Vetoriais ............................................................... 1173.1 Introdução ..................................................................................1193.2 Espaços Vetoriais ...................................................................... 1243.3 Subespaços Vetoriais .................................................................1323.4 Espaços Gerados ........................................................................1403.5 Independência Linear ...............................................................1473.6 Bases e Dimensão ......................................................................1603.7 Subespaços Associados a Matrizes
e Computação de Bases ............................................................1813.8 Espaços Linha/Coluna e os Sistemas Lineares .................... 1853.9 Mais Exemplos sobre Computação de Bases ........................ 186Exercícios Propostos ......................................................................... 188
Resumo ............................................................................................. 200
Bibliografia Comentada ..................................................................... 202
4 Transformações Lineares ................................................. 2054.1 Introdução ................................................................................. 2074.2 Operações com Transformações Lineares .............................218

4.3 A Imagem e o Núcleo de uma Transformação Linear ............................................................. 228
4.4 Transformações Injetoras, Sobrejetoras e Isomorfismos ................................................... 232
4.5 Representação Matricial de Transformações Lineares ........................................................ 239
4.6 Semelhança ............................................................................... 2464.7 Matrizes e Transformações Lineares,
Equivalências e Propriedades ................................................ 252Exercícios Propostos ......................................................................... 253
Resumo ............................................................................................. 263
Bibliografia Comentada ..................................................................... 264
Apresentação
A Álgebra Linear é o estudo dos espaços vetoriais e das transformações lineares definidas entre eles. Quando os espaços têm dimensões fini-tas, as transformações lineares podem ser representadas por matrizes. Também com matrizes podem ser representadas as formas bilineares e, mais particularmente, as formas quadráticas. Assim a Álgebra Linear, além de vetores e transformações lineares, lida também com matrizes e formas quadráticas. São numerosas e bastante variadas as situações, em Matemática e em suas aplicações, onde esses objetos se apresentam. Daí a importância central da Álgebra Linear no ensino da Matemática.
Neste livro se introduzem os conceitos da Álgebra Linear, desde os mais simples, que são as matrizes, até os mais abstratos, quando se trata do estudo de espaços vetoriais. Todos esses conceitos são apresentados, dentro do possível, de uma forma acessível, ajudando a compreensão com muitos exemplos, exercícios resolvidos e propostos. Também, com o objetivo de facilitar a compreensão do conteúdo, colocamos alguns tópicos com detalhes e justificações que usualmente não são expostos nos livros tradicionais.
Este texto pretende fornecer conceitos suficientes para que os estudan-tes consigam ter acesso ao nível dos livros avançados. Isto não significa deixar para trás as possibilidades que oferece a utilização de um sof-tware matemático ou ignorar as aplicações, no favor de uma exclusiva e única compreensão da Matemática. Significa que se pretende, princi-palmente, que o leitor obtenha uma compreensão global dos conceitos (como por exemplo, que a multiplicação de uma matriz por um vetor pode ser entendida como a aplicação de uma transformação linear) e também consiga acompanhar as provas e demonstrações.
O primeiro capítulo trata de Matrizes e Aplicações. No segundo capítulo, se estudam os Sistemas Lineares, começando com uma breve revisão dos conceitos da Geometria Analítica, para poder entender em uma forma ge-ométrica como é que tais sistemas podem ser caracterizados. No terceiro capítulo define-se Espaço Vetorial, um conceito básico da Álgebra Linear que proporciona unidade e precisão aos assuntos essenciais da Matemáti-ca. E finalmente, o quarto capítulo introduz a noção de Transformação Li-near e as relações que existem entre transformações lineares e matrizes.

Embora a apresentação esteja focalizada sobre os principais tópicos da Álgebra Linear, não pressupõe que os estudantes possuam desde o início uma prática em trabalhar com conceitos que demandem certos níveis de abstração, ainda que desejável. Em lugar disso, esta ativida-de é estimulada através dos muitos exemplos e exercícios que diferem das verificações rotineiras ou uso de técnicas de resolução. O objetivo está colocado principalmente em desenvolver, sendo o material usual de um curso de graduação, o nível de maturidade matemática de um estudante da Licenciatura de Matemática.
Sonia Elena Palomino Castro Bean
Daniel Noberto Kozakevich
1 Matrizes
11
1 Matrizes
Neste capítulo será fornecida uma série de conceitos, al-guns deles conhecidos por você, que permitirão tanto a for-mulação e processo de prova de propriedades e teoremas quanto à prática através de muitos exemplos para o estudo das matrizes. Além desses conceitos, incluiremos onde eles podem ser aplicados, o que será a base do desenvolvimento dos próximos capítulos.
1.1 Matriz As matrizes são estruturas matemáticas que podem ser encon-tradas em muitos problemas do nosso dia-a-dia. Por isso, neste capítulo, iniciaremos o estudo das matrizes com um problema vindo do nosso cotidiano.
Problema 1. Já pensou que a temperatura que temos em cada esta-ção do ano pode ser registrada dia-a-dia e hora a hora (e até minu-to a minuto!), com ajuda de dispositivos especiais? Isso é feito pelo Instituto de Metrologia de cada uma das regiões. Pensemos nesse problema colhendo parte das informações que possamos encon-trar num dos arquivos de dados aos quais temos acesso (e que seja do nosso interesse, claro!!). Esse problema será relatado a seguir:
As temperaturas de cinco cidades brasileiras nas primeiras horas da manhã de um determinado dia (e durante o inverno) foram registradas da forma seguinte:
Cidade n° 1: São Joaquim (SC) às 3 horas da manhã apresenta 3− graus centígrados;
Cidade n° 2: Rio de Janeiro (RJ) às 5 horas da manhã apresenta 14 graus centígrados;
Cidade n° 3: Turvo (SC) às 7 horas da manhã apresenta 5 graus centígrados;

12
Cidade n° 4: Florianópolis (SC) às 9 horas da manhã apresenta 16 graus centígrados;
Cidade n° 5: São Luis (MA) às 11 horas da manha apresenta 20 graus centígrados.
Essas informações podem ser arranjadas numa tabela de várias formas, como as apresentamos a seguir:
Cidade Temperatura Cidade Hora
1 -3 1 3
2 14 2 5
3 5 3 7
4 16 4 9
5 20 5 11
Hora Temperatura Hora Cidade
3 -3 3 1
5 14 5 2
7 5 7 3
9 16 9 4
11 20 11 5
Observe que dessa forma as informações estão dispostas em for-ma vertical, mais também podemos colocar as mesmas informa-ções em forma horizontal.
Pergunta 1. De que forma podem ser arranjados os dados acima de modo a estarem dispostos horizontalmente?
Por exemplo, a terceira tabela pode ser disposta da seguinte ma-neira:
H 3 5 7 9 11
T -3 14 5 16 20
Deixamos de atividade pra você, completar essa disposição hori-zontal no caso das outras tabelas.

13
Continuando com o Problema 1, suponhamos que por algum mo-tivo é do nosso interesse os dados do arranjo dado por esta última tabela usada. Assim, podemos formular o seguinte:
Em cinco cidades brasileiras, em determinadas horas, foram re-gistradas as seguintes temperaturas:
H T
3 -3
5 14
7 5
9 16
11 20
Observação. A mesma informação poderia ter sido colocada da seguinte forma:
H 3 5 7 9 11
T -3 14 5 16 20
Os números dados nos dois jeitos de arranjar nossos dados estão nos fornecendo o que denominaremos como Matriz.
1.1.1 Definição de matriz
Uma matriz é um arranjo de números, símbolos, letras, etc, dis-postos em linhas e colunas.
1.1.2 Ordem de uma matriz
As matrizes geralmente são denotadas por letras maiúsculas e seus elementos, dado cada número do arranjo, por minúsculas. Se uma matriz possui m linhas e n colunas diremos que a matriz tem ordem m n× .
Exemplo 1. Denominemos por A e B as duas matrizes definidas no Problema 1 e na Pergunta 1, respectivamente. Assim:
É de nosso interesse trabalhar apenas com
números reais neste livro, assim sendo tudo o que
será definido mais adiante, no caso das matrizes ou
vetores, será com elementos reais (mais adiante você
terá a possibilidade de trabalhar com números
complexos também!).

14
3 35 147 59 16
11 20
A
− =
e 3 5 7 9 113 14 5 16 20
B = −
A matriz A tem 5 linhas e 2 colunas, ou seja, é de ordem 5 2× ; já a matriz B tem 2 linhas e 5 colunas e é de ordem 2 5× .
O elemento da 2ª linha e 2ª coluna da matriz A é igual a 14 , ou seja:
22 14a =
O elemento da 1ª linha e 4ª coluna da matriz B é igual 9, isto é:
14 9b =
Quando uma matriz é obtida por algum problema específico (como o explicitado no Problema 1) é possível fornecer alguma interpretação aos seus elementos.
Por exemplo, as matrizes A e B do Exemplo 1 com elementos
22 14a = e 14 9b = podem ser interpretados da seguinte forma:
“No segundo horário (5 horas da manhã) o segundo valor da temperatura (no Rio de Janeiro) é 14 graus”.
“São 9 horas da manhã quando a temperatura em Florianópolis é 16 graus”.
E claro, após fornecermos todas as interpretações podemos fazer algumas conclusões: Eu gosto do frio, portanto irei para São Joa-quim no inverno. Não, não gosto de tanto frio, por isso no inverno ficarei no Rio de Janeiro.
Bom, você deve estar se perguntando: onde está a matemática nesse papo todo? Se estiver fazendo esse tipo de questionamento está indo por um bom caminho, pois a matemática por incrível que pareça está presente em muitas situações! E é isso que espe-ramos mostrar ao longo deste material!

15
Observação. A partir de agora serão dados vários exercícios que pediremos à você
resolver logo após os conteúdos fornecidos.
Agora verifique se você está acompanhando as discussões que fizemos resolvendo os seguintes exercícios.
Exercício 1. Coloque mais alguma condição no Problema 1 para construir uma matriz de ordem 3 x 5. Dica: Imagine que os dados são colhidos durante 3 dias.
Exercício 2. Será que você pode imaginar e criar um problema do seu cotidiano diferente do dado acima para chegar numa matriz?
Para cada posição i : linha, j : coluna (posição ( i , j ) ), do arranjo de uma matriz A podemos colocar um elemento, em geral, como
ija . Assim uma matriz com m n× elementos pode ser escrita na seguinte forma estendida:
11 12 1 1
21 22 2 2
1 2
1 2
j n
j n
i i ij in
m m mj mn
a a a aa a a a
Aa a a a
a a a a
=
Também, podemos colocá-la na forma abreviada
ij m nA a
× =
Assim, a matriz A de ordem m n× , possui m n× elementos da forma ija com 1, ,i m= e 1, ,j n= .
Em alguns livros pode, também, ser encontrada outra forma ao denotarmos uma matriz,
( )ij m nA a ×=

16
Muitas vezes é fornecida uma lei de formação para obtermos os elementos de uma matriz. Por exemplo, se
2 3ijA a×
= com
ija i j= + com 2m = e 3n = , estaremos construindo a seguinte matriz A :
1 1 1 2 1 3 2 3 42 1 2 2 2 3 3 4 5
A+ + +
= = + + +
Exemplo 2. Vamos obter a matriz 3 4( )ijB b ×= , de ordem 3 4× cujos elementos são da forma
, 1, 20, 3
j
iji i
bi
==
=
Solução. Observe que não há nenhuma condição para os índices j , isto é j está variando conforme o número de colunas que a
matriz tem. Já na 3ª linha ( 3)i = todos os elementos serão nulos. Assim sendo, a matriz B é dada por:
1 2 3 4
1 2 3 4
1 1 1 1 1 1 1 12 2 2 2 2 4 8 160 0 0 0 0 0 0 0
B = =
1.2 Tipos de Matrizes
1.2.1 Matriz Retangular
São denominadas assim aquelas matrizes cujo número de linhas é diferente ao número de colunas. Por exemplo:
1 10 95 2
A−
= −
0 1 2 3 47 2 3 8 01 3 3 2 6
3 5 0 0 9
B
− = −
e 0 0 11 3 9
C = −
são matrizes de ordem3 2× , 4 5× e 2 3× , respectivamente.
1.2.2 Matriz Linha
É a matriz que tem apenas uma linha. Por exemplo:
[ ]1 2 3 4L = ( )0 0 1 8M =

17
Observação. É comum colocarmos vetores no plano e no espaço como matrizes linha.
1.2.3 Matriz Coluna
É a matriz que tem apenas uma coluna. Por exemplo:
222
B =
011
43
D
= −
Observação. Sabia que um vetor no plano (ou no espaço) pode ser considerado como uma matriz coluna? Mais adiante (capítulo de Sistemas Lineares) usaremos essa forma ao representar a solução de um sistema de equações. Assim se tivermos duas ou três in-cógnitas elas podem ser alocadas numa forma vetorial no plano ou no espaço, respectivamente, você notará isso no livro do Prof. Reginaldo citado no final deste capítulo.
1.2.4 Matriz Nula
É a matriz cujos elementos são todos nulos. Por exemplo:
0 00 0
O =
0 0 0 00 0 0 00 0 0 0
O =
Estes tipos de matrizes geralmente são denotadas pela letra mai-úscula O e dependendo do problema deverá discernir a ordem da matriz no exercício ou problema em questão. Alguns autores denotam esta matriz da forma: 0ij m n
O×
= .
1.2.5 Matriz Quadrada
São aquelas matrizes onde o número de linhas é igual ao número de colunas. Nas seguintes matrizes, A é uma matriz de ordem n e B uma matriz de ordem 3:
ij nA a =
1 1 11 1 2
3 7 0B
= − −

18
A diagonal principal de uma matriz quadrada está dada pelos elementos na posição i j= . Por exemplo, os valores 1, 1− e 0 são os elementos da diagonal principal da matriz B .
É denominada como diagonal secundária os elementos da ma-triz cujos índices contabilizam o valor 1i j n+ = + , assim, na mesma matriz B dada acima os elementos 1, 1− e 3 são aqueles cujos índices sempre somam 3 1 4i j+ = + = , esses elementos são
13b , 22b e 31b .
A partir de agora falaremos um pouco mais sobre matrizes qua-dradas.
1.2.6 Matriz Diagonal
É uma matriz quadrada cujos elementos fora da diagonal princi-pal são todos não nulos, isto é, 0ija = se i j≠ . Por exemplo:
1 0 00 3 00 0 6
D =
0 00 1
E = −
Pelo fato das matrizes diagonais possuírem elementos, qua-se sempre não nulos. Apenas na posição ( , )i i é que elas po-dem ser denotadas como 1 2{ , , , } mdiag d d d ou ainda na forma
1 2{ , , , } ndiag d d d onde 1 2, , , nd d d indicam os elementos diago-nais. Por exemplo, a matriz D dada anteriormente pode ser escri-ta como {1,3,6}=D diag .
1.2.7 Matriz Identidade
é uma matriz diagonal onde todos os elementos são iguais a um. É geralmente denotada com a letra I e com um índice que denota a ordem, como ilustrado a seguir:
2
1 00 1
=
I 4
1 0 0 00 1 0 00 0 1 00 0 0 1
=
I

19
1.2.8 Matriz Triangular Superior
É uma matriz quadrada de ordem n cujos elementos 0ija = se i j> . Isto é:
11 12 1
22 20
0 0
n
n
nn
a a aa a
A
a
=
.
1.2.9 Matriz Triangular Inferior
É uma matriz quadrada de ordem n cujos elementos 0ija = se i j< , ou seja:
11
21 22
1 2
0 00
n n nn
aa a
A
a a a
=
.
1.2.10 Matriz Simétrica
Uma matriz quadrada S , de ordem n , é simétrica se ij jia a= , para quaisquer valores dos índices ,i j . São exemplos de matrizes si-métricas:
2
0 11 0
S−
= − 4
1 0 1 30 1 4 51 4 0 0
3 5 0
S
a
− − = −
−
Observe que o elemento a na posição (4, 4) da matriz 4S não tem valor numérico, isto é, assume qualquer valor real.
Exemplo 3. No seguinte exemplo, pede-se para encontrar os valo-res de , , , , ,t w s z a b para obtermos S simétrica:
2 00
0 01 0 0 0
a tx b w
Sz z
− = −
.
Quando falamos de elementos assumindo
qualquer valor real podemos denotá-lo com
a∈ . Nesse caso, o símbolo ∈ é lido como
“pertence a” e denota os números reais.

20
Solução. Pela definição de matriz simétrica, todos os elementos
ijs da matriz S devem ser tais que ij jis s= . Como a matriz é de ordem 4n = e considerando que ,i j variam entre 1 e 4 , (ou seja, , 1, , 4i j = ) encontramos que:
21 122s x s= = =
Também:
31 130s z s= = =
e de forma similar:
41 141s t s= = − = ,
Assim,
1t = − .
Também,
32 23s z w s= − = = ,
como 0z = e o oposto de zero é ele próprio, então:
0w = .
Por último
11s a= e 22s b= ,
mas não há nenhuma condição para esses valores. Portanto, a e b são valores reais quaisquer, isto é, ,a b∈ .
1.2.11 Matriz Anti-simétrica
Uma matriz quadrada A é anti-simétrica se ij jia a= − . São exem-plos de matrizes anti-simétricas as matrizes:
0 11 0
A−
=
0 2 62 0 46 4 0
B = − − −
Exemplo 4. Dada a matriz S fornecida no Exemplo 3, encontre os valores de , , , , ,t w s z a b para S ser uma matriz anti-simétrica.

21
Solução. Usando um raciocínio similar ao usado no Exemplo 3 e con-siderando que para cada valor de i e j deve se satisfazer ij jia a= − , encontra-se 2x = , 0z = , 1t = , 0w = , 0a = e 0b = . Assim:
0 2 0 12 0 0 0
0 0 0 01 0 0 0
S
− − =
.
Você percebeu que os elementos da diago-nal principal das matrizes anti-simétricas
fornecidas são todos nulos? Isto seria apenas uma coincidência? No exemplo seguinte, pro-varemos que este resultado vale para qualquer matriz anti-simétrica
Exemplo 5. Prove que os valores da diagonal principal de uma matriz anti-simétrica qualquer são todos nulos.
Solução. Se ij nA a = é uma matriz anti-simétrica de ordem n ,
os seus elementos satisfazem a relação ij jia a= − para quaisquer valores ,i j .
Os elementos na diagonal principal encontram-se na posição i j= , então ii iia a= − .
Daí, 2 0iia = para qualquer valor de i . Em conseqüência, 0iia = para qualquer i .
Um exemplo numérico que ilustra o que acabamos de provar foi dado no Exemplo 4. Nele você encontrou que os valores diagonais são todos nulos!
1.2.12 Matriz Elementar
Uma matriz é denominada elementar se for obtida por meio de uma mudança na matriz identidade. Essa mudança pode ser de um dos seguintes tipos:

22
a troca de uma linha (ou coluna) por outra linha (ou coluna).1)
a multiplicação de uma linha (ou coluna) por um valor 2) ∈ .
a soma de uma linha (ou coluna) multiplicada pelo valor 3) ∈ com outra linha (ou coluna).
Exemplos:
A matriz elementar de ordem 2 obtida ao trocarmos a linha a) 1 pela linha 2 da matriz identidade de ordem 2 é dada por:
1
0 11 0
E =
A matriz elementar de ordem 4 obtida ao multiplicar na li-b) nha 3 da matriz identidade (de ordem 4) por 2− é dada por:
2
1 0 0 10 1 0 00 0 2 00 0 0 1
E
= −
A matriz elementar de ordem 3 obtida ao multiplicar a linha c) 3 por 3− e somar com a linha 2 da matriz identidade (de ordem 3) é dada por:
3
1 0 00 1 00 1 3
E = −
Também são matrizes elementares as matrizes:
1 00 2
A = −
1 0 0 00 1 0 01 0 1 00 0 0 1
B
=
Agora é com você!
Exercício 3. Como foram obtidas as matrizes elementares A e B anteriores?

23
1.2.13 Igualdade de Matrizes
Duas matrizes A e B , de ordem m n× , são ditas serem iguais se todos os seus elementos são iguais. Isto pode se expressar com a seguinte relação de igualdade:
A expressão , ,ij ija b i j= ∀ ,
também pode ser colocada como:
, {1, , }, {1, , }ij ija b i m j n= ∀ ∈ ∀ ∈
Exemplo 6. Forneça condições para estabelecer a igualdade das matrizes A e S dadas abaixo.
0 2 0 12 0 2
0 2 0 01 0 0
tA
t
− − − = −
11 2 0 12 2
0 2 0 01 0 0
sy t
S
t
− − − = − −
Solução. Como as matrizes são de ordem 4, teremos , {1, , 4}i j ∈ . Se A S= , então, ij ija s= , {1, , 4}i j∀ ∈
, assim:
11 110a s= =
22 220a s y= = =
daí resulta:
0y =
Também,
24 24a t s t= − = = −
com isso:
t ∈
Mais,
42 42a t s t= = = −
2 0t =
O símbolo matemático ∀ é lido “para todo”. Na
relação dada, ∀ i, j é lido “para todo elemento i e
para todo elemento j”

24
que implica,
0t =
Por último,
t ∈ e 0t = , implica 0t = .
As matrizes 1 11 1
A =
e
1 1 11 1 1
B =
possuem os mesmos ele-
mentos, mas não são iguais, você pode justificar o porquê?
1.3 Operações com MatrizesA seguir, serão definidas as operações de adição, produto por um escalar e produto de matrizes.
1.3.1 Adição de Matrizes
Dadas as matrizes ij m nA a
× = e ij m n
B b×
= , a adição das matri-
zes A e B é a matriz ij m nC c
× = , onde ij ij ijc a b= + , ,i j∀ .
Notação. C A B= + .
ij ij m nA B a b
× + = +
Exemplo 7. Se
0 2 0 12 0 2
0 2 0 01 0 0
tA
t
− − − = −
e
11 2 0 12 20 2 0 01 0 0
sy t
S
t
− − − = − −
, cal-
cule C A S= + para ,t y e 11s quaisquer números reais.
Solução. Ao aplicarmos a definição de soma de matrizes nas ma-trizes A e S , teremos:
11 4 0 00 0 20 4 0 02 0 0 0
sy t
C
− = −
.

25
1.3.2 Produto de uma Matriz por um Escalar
Dado o escalar , o produto da matriz A pelo escalar é uma ma-triz da mesma ordem cujos elementos foram multiplicados pelo valor . Em outras palavras, se ij m n
A a×
= e ∈ , o produto de A pelo escalar é uma matriz C de elementos ijc com ij ijc a= para todos os valores ,i j definidos na matriz A . Isto é:
ij m nC c
× = , tal que ij ijc a= , ,i j∀ .
Notação. C A=
Exemplo 8. Multiplique a matriz 4I pelo escalar 2 = − .
Solução.
4
1 0 0 0 2 0 0 00 1 0 0 0 2 0 0
20 0 1 0 0 0 2 00 0 0 1 0 0 0 2
C I
− − = = − = − −
Nota. 1.A A− = −
1.3.3 Produto de Matrizes
Dadas as matrizes kj t nA a
× = e kj t n
B b×
= , o produto das matrizes
A e B é uma matriz ij m nC c
× = cujos elementos ijc são da forma:
1
t
ij ik kjk
c a b=
= ∑ .
Isto é, ao definirmos as matrizes:
11 12 1
21 22 2
1 2
t
t
m m mt m t
a a aa a a
A
a a a×
=
,
11 12 1
21 22 2
1 2
n
n
t t tn t n
b b bb b b
B
b b b×
=
e
11 12 1
21 22 2
1 2
n
n
m m mn m n
c c cc c c
C
c c c×
=
Na maioria dos casos, um escalar é um número real ∈ . É possível também tomarmos os escalares como números comple-xos, ∈ . Os escalares podem ser tomados de qualquer sistema numé-rico no qual podemos so-mar, subtrair, multiplicar e dividir de acordo com as leis habituais da arit-mética.

26
Os elementos da matriz produto adotam a forma:
1 1 2 2ij i j i j it tjc a b a b a b= + + +
1
t
ij ik kjk
c a b=
= ∑ .
Exemplo 9. Seja a matriz A de ordem 3 3× dada abaixo e a ma-triz B , de ordem 3 4× , fornecida no Exemplo 2. Obter a matriz produto C AB= .
Solução. Desde que o número de colunas de A seja igual ao nú-mero de linhas de B ( 3)t = , o produto pedido é possível. As ma-trizes explicitadas são dadas respectivamente por:
2 3 43 4 54 5 6
A =
,
1 1 1 12 4 8 163 9 27 91
B =
Para obtermos a matriz produto 3 4ijC AB c×
= = com elementos 3
1, 1, ,3, 1, , 4ij ik kj
kc a b i j
=
= = =∑ .
Percorrendo cada valor de i e j dado temos os elementos da:
primeira linha,
11 (2)(1) (3)(2) (4)(3)c = + + , 12 (2)(1) (3)(4) (4)(9)c = + + ,
13 (2)(1) (3)(8) (4)(27)c = + + , 14 (2)(1) (3)(16) (4)(81)c = + + ,
segunda linha,
21 (3)(1) (4)(2) (5)(3)c = + + , 22 (3)(1) (4)(4) (5)(9)c = + + ,
23 (3)(1) (4)(8) (5)(27)c = + + , 24 (3)(1) (4)(16) (5)(81)c = + + ,
e por último os da terceira linha,
31 (6)(1) (7)(2) (8)(3),c = + + 32 (6)(1) (7)(4) (8)(9),c = + + ,
33 (6)(1) (7)(8) (8)(27),c = + + 34 (6)(1) (7)(16) (8)(81).c = + +

27
Sendo assim, tem-se a seguinte matriz:
11 12 13 14
21 22 23 24
31 32 33 34
c c c cC c c c c
c c c c
=
;
20 50 134 37426 64 170 47244 106 278 766
C =
.
Ao multiplicarmos matrizes devemos tomar cuidado com a ordem das linhas e co-
lunas, ou seja, poderemos fazer o produto de matrizes quando o número de colunas da pri-meira matriz seja igual ao número de linhas da segunda. Assim, a matriz produto C terá um número de linhas igual ao número de linhas da matriz A e um número de colunas igual ao número de colunas de B.
1.3.4 Propriedades das Operações com Matrizes
1) Propriedades da Adição
A1) Comutatividade: A B B A+ = +
A2) Associatividade: ( ) ( )A B C A B C+ + = + +
A3) Elemento Neutro da Soma: A O A+ = , [0]m nO ×=
A4) Elemento Simétrico: ( )A A O+ − = ( )A A O− =
Observação. ( 1). 1.( )ij ijm n m nA A a a
× × − = − = − = −
• Prova das Propriedades
A1) Comutatividade: A B B A+ = +
Seja ij m nA a
× = e ij m n
B b×
=
ij ijm n m nA B a b
× × + = +
ij ij m na b
× = +
( )ij ij m na b
× = +

28
Usando a Propriedade comutativa dos números reais:
( ) ( )x y y x+ = + , com ,x y ∈
temos,
( )ij ij m nb a
× = +
ij ij m nb a
× = +
B A= +
Logo,
A B B A+ = + .
A2) Associatividade: ( ) ( )A B C A B C+ + = + +
Consideremos ij m nA a
× = , ij m n
B b×
= e ij m nC c
× = .
Da definição de soma de matrizes,
ij ij m nA B a b
× + = +
e
( ) ( )ij ij ij m nA B C a b c
× + + = + + .
Usando a propriedade associativa dos números reais:
( ) ( )x y z x y z+ + = + + com , ,x y z ∈ .
Temos então,( )ij ij ij m n
a b c×
= + +
E usando a definição de soma de matrizes:
ij ij ijm n m na b c
× × = + +
( )A B C= + + .
Logo,
( ) ( )A B C A B C+ + = + + .
29
A3) Elemento Neutro da Soma: A O A+ = , [0]m nO ×=
Seja ij m nA a
× = e 0ij m n
O×
=
0 ( 0)ij ijm n m nA O a a
× × + = + = + .
Pela propriedade dos números reais:
0x x+ = com x ∈ .
Então,
0 , ,ij ija a i j+ = ∀ .
Com isso,
0ij ijm n m na a
× × + =
A=
Logo,A O A+ = .
A4) Elemento Simétrico: ( )A A O+ − =
Seja ij m nA a
× = e ij m n
A a×
− = − .
( ) ( )ij ij m nA A a a
× + − = + −
Pela propriedade dos números reais:
( ) 0x x+ − = com x ∈ .
Então,( ) 0, ,ij ija a i j+ − = ∀ .
Assim,( ) [0]ij ij m nm n
a a O×× + − = = .
Logo, ( )A A O+ − = .

30
2) Propriedades do Produto por um Escalar
Sejam A e B duas matrizes da mesma ordem e , dois escala-res, então:
M1) ( ) ( )A A =
M2) ( )A B A B + = +
M3) ( ) A A A + = +
M4) 1.A A=
Observação. Quando trabalhamos com matrizes, pode acontecer a necessidade de multiplicar pelo escalar zero dando como resul-tado a matriz nula. Isto é, 0.A = O.
Vejamos: se ij m nA a
× = , 0ij m n
O×
= e o escalar nulo (0):
0. ij m nA O a
× =
0. ij m na
× =
[0]m n×=
O= .
• Prova das Propriedades
M3) ( ) A A A + = +
Sejam , dois escalares e a matriz ij m nA a
× = , então:
( ). ( ) ij m nA a
× + = +
( ) ij m na
× = +
Usando a propriedade distributiva dos números reais ( ).x y z xz yz+ = + para cada elemento da matriz, temos:
( ) ( )ij ij m na a
× = +
ij ijm n m na a
× × = +
Você observou as diferenças entre o zero escalar e a matriz zero, denotada pela letra O?

31
Pela definição de produto por um escalar,
ij ijm n m na a
× × = +
A A = +
Logo,( ). A A A + = +
M4) 1.A A=
Seja ij m nA a
× = e o escalar 1∈ .
1. 1. ij m nA a
× =
1. ij m na
× =
(1. )ij m na
× =
Usando a propriedade do elemento neutro da multiplicação dos números reais,
1. , x x x= ∀ ∈
Temos,
1. ij ijm n m na a A
× × = =
Logo,1.A A= .
Agora é com você!
Exercício 4. Prove as outras propriedades do produto de uma ma-triz por um escalar.
3) Propriedades do Produto de Matrizes
P1) Associativa: ( ) ( )AB C A BC=
P2) Distributiva: ( )A B C AB AC+ = +
P3) ( )A B C AC BC+ = +
P4) ( ) ( ) ( )AB A B A B = =
Ao enunciar as propriedades do produto
de matrizes representa-se a ordem das mesmas, por
exemplo, em P1 , (AB)C = A(BC) supõe os produtos AB e BC, isto é,
o número de colunas de A é igual ao número de
linhas de B e o número de colunas de B é igual ao número de linhas de C.

32
• Prova das Propriedades
P3) ( )A B C AC BC+ = +
Sejam as matrizes [ ]ik m pA a ×= , [ ]ik m pB b ×= , [ ]kj p nC c ×= , então:
( ) [( )] .ik ik m p kj p nA B C a b c× ×
+ = +
Usando a definição do produto de matrizes para A B+ e C , temos:
1( )
p
ik ik kjk m n
a b c= ×
= +
∑ .
Usando a propriedade distributiva dos números reais:
1
p
ik kj ik kjk m n
a c b c= ×
= +
∑ .
Pela propriedade 2 dos somatórios e da definição de adição de matrizes,
1 1 1 1
p p p p
ik kj ik kj ik kj ik kjk k k km n m n m n
a c b c a c b c= = = =× × ×
+ = +
∑ ∑ ∑ ∑
Pela definição do produto de matrizes:
AC BC= + .logo,
( )A B C AC BC+ = + .
P4) ( ) ( ) ( )AB A B A B = =
Seja ∈ , [ ]ik m tA a ×= e [ ]kj t nB b ×=
1( ) [ ] . [ ] ( . )
t
ik m t kj t n ik kjk m n
AB a b a b × ×= ×
= = ∑ .
Usando a propriedade do somatório:
1 1
n n
i ii i
c x cx= =
=∑ ∑ , c : constante,
A lista de propriedades se encontra no final desta seção.

33
temos,
1
( . )n
ik kjk m t
a b= ×
= ∑
Da propriedade associativa dos números reais:
( . ). .( . )x y z x y z= com , ,x y z ∈ .
Temos,
1( ).
n
ik kjk m t
a b= ×
= ∑
E pela definição de produto de matrizes e produto de uma matriz por um escalar,
( )A B= .Logo,
( ) ( )AB A B = .
Observação. É importante observar que em geral AB BA≠ , isso será ilustrado com o seguinte exemplo.
Exemplo 10. Dadas as matrizes 1 00 1
A = −
e 1 11 0
B =
, a ma-
triz produto 1 11 0
AB = −
, entretanto 1 11 0
BA−
=
, verificando
que AB BA≠ .
No ambiente virtual você encontrará al-gumas atividades nas quais você pode-
rá praticar tanto a multiplicação de matrizes numéricas, usando problemas do cotidiano, quanto a aplicação das propriedades.
Agora é com você!
Exercício 5. Prove as outras propriedades do produto de uma matriz.

34
1.3.5 Transposta de uma Matriz
Seja ij m nA a
× = , a matriz transposta de A , denotada por A' é
aquela matriz obtida trocando as linhas pelas colunas de A . Isto é:
' ji m nA a
× = .
Por exemplo, se 2 3
1 2 34 5 6
A×
=
, a matriz transposta é uma ma-
triz de ordem 3 2× dada por:
3 2
1 4' 2 5
3 6A
×
=
Observe que na matriz transposta cada elemento na linha i e co-luna j aparece como sendo um elemento da linha j e coluna i da matriz A .
Exemplo 11. Seja A uma matriz de ordem 2, encontre o valor de x de modo que 'A A= .
11 0
xA
= −
Solução.1 1
'0
Ax
− =
Como 'A A= é uma condição do exercício, então:
1 1 10 1 0
xx
− = −
Isto será válido apenas se 1x = − .
Observação. Outra forma de definir a matriz simétrica é usando a matriz transposta. Assim, diremos que uma matriz é simétrica se ela coincide com a sua transposta, isto é, 'A A= .
Na literatura é também usual encontrar a transposta de uma matriz denotada como AT ou At, mas usaremos tal notação pelo fato de ser a forma como trabalharemos computacionalmente com alguns softwares como MATLAB® ou SCILAB, durante as nossas aulas ou no ambiente virtual.

35
1.3.6 Propriedades da Matriz Transposta
( ') 'A A=1)
( ) ' ' 'A B A B+ = +2)
( ) ' ' 'AB B A=3)
( ) ' ', A A = ∈4)
• Prova da Propriedade 3
( ) ' ' 'AB B A= .
Sejam [ ]ik m pA a ×= , [ ]kj p nB b ×=
1
p
ik kjk m n
AB a b= ×
=
∑
[ ]ij m nc ×=
Com,
1
p
ij ik kjk
c a b=
= ∑
Pela definição de transposta de uma matriz,
( ) ' [ ]ji n mAB c ×=
1
p
jk kik
a b=
= ∑ (1)
Pode-se verificar que:
1 1
p p
jk ki jk kik k
b a a b= =
=∑ ∑ (2)
Por outro lado:
' [ ] , ' [ ]jk n p ki p mB b A a× ×= = , ' [ ] , ' [ ]jk n p ki p mB b A a× ×= = ,
Observe que { }1, ,k p∈ , e
1' '
p
jk kik n m
B A b a= ×
=
∑

36
(deixamos ao leitor a tarefa de pesquisar a propriedade do so-matório usado), substituindo (2) e (1):
1( ) '
p
jk kik n m
AB b a= ×
=
∑
Logo,
( ) ' ' 'AB B A= .
Agora é com você!
Exercício 6. Prove as demais propriedades, justificando todos os passos do seu procedimento.
Exercício 7. Prove que se 'A A= − , então A é anti-simétrica.
Exercício 8. Dado uma escalar não nulo , prove que, se A é uma matriz simétrica e B é uma matriz anti-simétrica, então, /A é simétrica e /B é anti-simétrica.
Exemplo 12. Prove que toda matriz quadrada pode ser colocada como a soma de uma matriz simétrica com outra anti-simétrica.
Solução. Seja ij nA a = . Em primeiro lugar vejamos que 'A A+ é
uma matriz simétrica.
De fato:' '' 'A A A A+ = + (pela propriedade de transposta)
( ' ) 'A A= + (usando a definição de transposta)
e usando comutatividade:
' ( ') 'A A A A+ = + .
Isto é, 'A A+ é uma matriz simétrica.
Também 'A A− é anti-simétrica, e neste caso, na prova, usaremos as propriedades dadas acima.
( ' )A A− =
'' 'A A= −
'A A= −
( ' )A A= − −

37
Isto é, 'A A− é uma matriz anti-simétrica.
Agora, observe que:
' '2 2
A A A AA + − = +
, pois já foi visto que se uma matriz é
simétrica, vezes a matriz também é simétrica.
Isto é, A é a soma de uma matriz simétrica com outra anti-simétrica.
1.3.7 Potência de uma Matriz: Ap
Seja A uma matriz quadrada e p um inteiro positivo, a potência p da matriz A , denotada por pA está definida por:
vezes
p
pA A A=
Exemplo 13. Se [ ]nA i j= − , calcular 3A , para 2,3,4n = .
Solução. Pela lei de formação fornecida obtemos facilmente o va-lor de A:
Se 2n = , 0 11 0
A−
=
.
Assim,
2 0 1 0 1 1 01 0 1 0 0 1
A AA− − −
= = = −
3 2 1 0 0 1 0 10 1 1 0 1 0
A AAA A A− −
= = = = − −
De forma similar, resolva quando 3n = e 4n = .
Para tanto, seguem algumas informações que serão úteis ao longo do exercício:
Calcular 1) pA equivale a calcular 1.pA A− . Assim se quiser en-contrar 50A , teria primeiro que ter calculado 49A e multipli-car o resultado por A (para o que previamente teria calcula-do o valor de 48A e assim por diante).
Por definição se 2) 0p = e A O≠ então 0A I= .

38
1.3.8 Traço de uma Matriz
Dada ij nA a = , o traço de A , denotado por ( )Tr A , é o número
dado pela soma dos elementos diagonais. Isto é:
1( )
n
iii
Tr A a=
= ∑
Por exemplo, se
1 1 1 00 0 2 5
( ) 1 0 7 5 133 4 7 10 0 0 5
A Tr A
− = ⇒ = + + + =
1.3.9 Propriedades do Traço
( ) ( ) ( )Tr A B Tr A Tr B+ = +1)
( ) ( )Tr A Tr A =2)
( ') ( )Tr A Tr A=3)
( ) ( )Tr AB Tr BA=4)
• Prova da Propriedade 1
( ) ( ) ( )Tr A B Tr A Tr B+ = +
Sejam ij nA a = e ij n
B b = duas matrizes quadradas.
Pela definição do traço,
1( ) ( )
n
ii iii
Tr A B a b=
+ = +∑ ,
e pela propriedade do somatório:
1 1
n n
ii iii i
a b= =
= +∑ ∑
( ) ( )Tr A Tr B= +
Agora é com você!
Exercício 9. Prove as outras propriedades.

39
Exercícios Resolvidos
1) Dada a matriz 2 3
1 1 70 5 2
A×
− = −
, encontre a sua transposta.
Solução.
3 2
1 0' 1 5
7 2A
×
= − −
2) Encontre o traço de matriz identidade.
Solução. Seja nI a matriz identidade de ordem n .
1( ) 1
n
ni
Tr I n=
= =∑ .
3) Encontre o traço de uma matriz diagonal e de uma matriz triangular de qualquer ordem.
Solução. Usando a notação simplificada, temos a matriz diagonal { }1 2, , , nD diag d d d= . Assim:
1( )
n
ii
Tr D d=
= ∑ .
Deixamos para você o cálculo do traço no caso de se ter uma matriz triangular.
1.3.10 Propriedades de Somatórios
Os seguintes itens fornecem algumas propriedades de somató-rios úteis para a prova das propriedades listadas anteriormente.
1 1
n n
i ji i
b b= =
=∑ ∑a)
1 1 1( )
n n n
i i i ii i i
a b a b= = =
+ = +∑ ∑ ∑b)
1 1
n n
i k k ii i
b a a b= =
=∑ ∑c)
1 1 1 1
n m m n
ij iji j j i
b b= = = =
=∑∑ ∑∑d)

40
Observação. No ambiente virtual de aprendizagem (e no final des-te capítulo) você encontrará um resumo de todas as propriedades até aqui utilizadas, que servirá de ajuda para estudar as proprie-dades das matrizes junto com as propriedades das operações.
1.4 Determinantes
1.4.1 Menor de uma Matriz: Mij
Dada uma matriz quadrada, [ ]ij nA a= , menor de uma matriz, de-notado por ijM , é uma submatriz de ordem ( 1)n − obtida ao can-celarmos a linha i e a coluna j . Isto é:
Assim, se:
11 12 1 1
21 22 2 2
1 2
1 2
j n
j n
i i ij in
m m mj mn
a a a aa a a a
Aa a a a
a a a a
=
( )1ij ij nM a
− ⇒ =
Com:
( ) ( )
( ) ( )( ) ( )( ) ( )
( ) ( )( ) ( )( ) ( )
( ) ( )
11 11 1 1 1
1 1 1 1 1 1 1
1 1 1 1 1 1 1
1 1 1
nj j
i i j i j i nij
i i j i j i n
m nnn j n j
a a a a
a a a aM
a a a a
a a a a
− +
− − − − + −
+ + − + + +
− +
=
Exemplo:
Se2 3 4 5 60 0 1 3 42 1 3 2 00 0 0 1 01 1 1 1 1
A
= − −
,

41
então, o menor 34M é obtido ao eliminarmos a linha 3 e a coluna 4, isto é:
34
2 3 4 60 0 1 40 0 0 01 1 1 1
M
=
.
Similarmente ao eliminarmos a linha 1 e coluna 1, obtemos o menor 11M .
11
0 1 3 41 3 2 0
0 0 1 01 1 1 1
M
− = −
.
Agora é com você!
Exercício 10. Verifique que ij nA a = (com 2n elementos) possui
2n menores.
Nesta parte da teoria assumimos que você está familiarizado com o cálculo de determinantes de matrizes de ordem 2 e 3. O valor do determinante de uma matriz A é denotado nas formas det ( )A , det A ou A . Por exemplo, se:
0 11 0
A = −
, então det ( ) (0)(0) ( 1)(1) 1A = − − = − .
Similarmente, se:1 2 34 5 67 8 9
B =
, então:
det ( ) (1)(5)(9) (2)(6)(7) (3)(4)(8) (3)(5)(7) (1)(6)(8) (2)(4)(9)B = + + − − − =
45 54 96 105 48 72 0= + + − − − = .
Com esses exemplos, estamos relembrando de forma rápida que o determinante de uma matriz de ordem 2 calcula-se de uma única maneira: diferença da diagonal principal pela diagonal secundá-ria. E o determinante de uma matriz de ordem 3 calcula-se pela Regra de Sarrus.
Para lembrar esta regra pesquise na Internet ou
em algum material de matemática do ensino
médio.

42
1.4.2 Cofator de uma Matriz: Aij
O cofator ijA do elemento na posição ( , )i j de uma matriz A é dado pelo valor do determinante ijM , vezes o valor ( 1)i j+− . Isto é:
( 1) det ( )i jij ijA M+= −
Ou:
( 1) i jij ijA M+= −
Exemplo 14. Se
2 3 4 60 0 1 40 0 0 01 1 1 1
A
=
, calcule A44 , A11 , A31 , A33 , A14 , A23 e A32.
Solução.
4 444 44
2 3 4( 1) ( 1) 0 0 1 0
0 0 0A M+= − = + =
1 111 11
0 1 4( 1) ( 1) 0 0 0 0
1 1 1A M+= − = + =
3 131 31
3 4 6( 1) ( 1) 0 1 4 19 18 1
1 1 1A M+= − = + = − =
3 333 33
2 3 6( 1) ( 1) 0 0 4 12 8 4
1 1 1A M+= − = + = − =
1 414 14
0 0 1( 1) ( 1) 0 0 0 0
1 1 1A M+= − = − =

43
2 323 23
2 3 6( 1) ( 1) 0 0 0 0
1 1 1A M+= − = − =
3 232 32
2 4 6( 1) ( 1) 0 1 4 (18 14) 4
1 1 1A M+= − = − = − − −
Observe as mudanças de sinais dos elementos nas posições ( , )i j , isto é, ( 1) i j+− :
+ − + −− + − ++ − + −− + − +
Em geral, para uma matriz de qualquer ordem, as mudanças de sinais dos elementos nas posições ( , )i j ( 1)( )i j+− são:
+ − +− + −+ − +
1.4.3 Determinante de A usando Cofatores
Dada A uma matriz de ordem n , ij nA a =
Se 2n = , os menores e os cofatores da linha um da matriz de or-dem dois são dados respectivamente por:
11 22 11 22, M a A a= =
12 21 12 21, M a A a= = −
E o valor do determinante:
11 1211 22 21 12
21 22
det ( )a a
A a a a aa a
= = −
11 11 12 12| | ( | |)a M a M= + −
11 11 12 12a A a A= + .

44
Se 3n = , o valor do determinante da matriz (colocado em função dos cofatores relativos à primeira linha) será:
11 12 13
21 22 23
31 32 33
det ( )a a a
A a a aa a a
=
11 22 33 12 23 31 13 21 32 31 22 13 32 23 11 33 21 21a a a a a a a a a a a a a a a a a a= + + − − −
11 22 33 32 23 12 23 31 33 21 13 21 32 31 22( ) ( ) ( )a a a a a a a a a a a a a a a= − + − + −
11 11 12 12 13 13( | |) ( | |) ( | |)a M a M a M= + + − + +
3
11 11 12 12 13 13 1 11
j jj
a A a A a A a A=
= + + = ∑
Também usando a segunda linha,
21 21 22 22 23 23| | ( | |) ( | |) ( | |)A a M a M a M= − + + + −
3
21 21 22 22 23 23 2 21
j jj
a A a A a A a A=
= + + = ∑
Por exemplo, se 1 2 34 5 67 8 9
A =
o determinante usando a segunda linha é dado por:
21 22 23| | 4 5 6A A A A= + +
21 22 234( ) 5( ) 6( )M M M= − + + + −
4(18 24) 5(9 21) 6(8 14)= − − + − − −
24 60 36 0= − + =
No caso geral de uma matriz de ordem n , o cálculo do determinan-te da matriz referido a linha 1 (ou a qualquer linha k ) é dado por:
11 11 12 12 1 1| | n nA a A a A a A= + + +
1 1 1 11 1
n n
i i j ji j
a A a A= =
= =∑ ∑
Referindo o desenvolvimento do determinante para qualquer li-nha k , temos:

45
1
n
kj kjj
A a A=
= ∑
onde k é um valor fixo.
Usando a matriz do Exemplo 14 e calculando o determinante pelo desenvolvimento da linha 3, temos:
31 32 33 340 0 0 0 0A A A A A= + + + =
Note que, nessa matriz não nos importa o valor do cofator (34) muito menos os dos outros que já foram calculados.
Similarmente é possível fazer o desenvolvimento por colunas. Veja,
Desenvolvendo usando a primeira coluna:1)
11 11 21 21 1 1n nA a A a A a A= + + +
Deixamos pra você chegar no seguinte desenvolvimento 2) para uma coluna k qualquer:
1
n
ik iki
A a A=
= ∑ , k um valor fixo.
Nota. O desenvolvimento dado acima para encontrarmos o valor do determinante (seja usando as linhas ou as colunas) é comu-mente conhecido como o desenvolvimento de Laplace.
1.4.4 Definição Geral do Determinante de uma Matriz
• Permutação
Dado n números 1,2, , n (ou n objetos distintos) uma permu-tação destes números (ou objetos) consiste em dispô-los em uma determinada ordem.
Exemplo. Se 3n = , os números 1, 2 e 3 podem ser colocados como (1 2 3), (3 2 1), etc.
Se 4n = , os números 1, 2, 3 e 4 podem ser colocados como (1 2 3 4), (2 1 3 4), etc.
Notação. Uma permutação de n números é denotada por
1 2( )nj j j.
Astrônomo e matemático francês, Marquês de Pierre
Simon de Laplace (1749-1827) ficou conhecido como
o “Newton francês”. Sua carreira foi importante por suas contribuições
técnicas para as ciências exatas, tanto pelo ponto
de vista filosófico que ele desenvolveu durante
sua vida, quanto pela parcela que tomou parte
na formação das modernas disciplinas científicas.
46
• Número de Permutações
Dados os números 1) 1 e 2 há duas permutações (1 2) e (2 1), ou seja, 2! permutações.
No caso dos números 2) 1, 2 e 3 as permutações (1 2 3) e (3 2 1), são dois exemplos, no total existem 3! permutações. Quais são?
Dado 3) n números, 1,2, , n , existem !n permutações.
Agora é com você!
Exercício 11. Calcule o número de permutações possíveis de 4 números.
• Inversão
É o número de mudanças necessárias em uma permutação para voltá-la na sua posição ordenada inicial.
Notação. Uma inversão de n números será denotada por:
1 2( )nJ J j j j=
Por exemplo, nas permutações dadas acima:
(1 2 3) 0J = , (1 2 3 4) 0J = e (3 2 1) 3J = .
No último caso, embora o número 2 esteja na posição que lhe cor-responde, para colocarmos os números 3 e 1 nos seus lugares será necessário fazermos:
(3 2 1) (2 3 1) (2 1 3)→ → e por último (1 2 3) .
Ou (3 2 1) (3 1 2) (1 3 2)→ → e por último (1 2 3) .
Em ambos os casos haverá 3 inversões.
Exemplo 15. Construir uma tabela do número de inversões pos-síveis de 2 e 3 números.

47
Solução. Se 2n = ,
Permutação Nº. de inversões
12 (1 2) 0J =
21 (2 1) 0J =
Se 3n = ,
Permutação Nº. de inversões
123 (1 2 3) 0J =
132 (1 3 2) 1J =
213 (2 1 3) 1J =
231 (2 3 1) 2J =
312 (3 1 2) 2J =
321 (3 2 1) 3J =
Agora é com você!
Exercício 12. Verifique que o número de inversões da permutação J (4 3 2 1) é igual a 6.
Exemplo 16. Construir uma tabela do número de inversões de 4 números.
Solução. Neste caso o número de inversões para cada permutação
1 2 3 4( )j j j j será dada por 1 2 3 4( )J J j j j j= . O resultado será colocado na segunda coluna da tabela.
Permutação Nº. de inversões
1234 0
1243 1
1324 1
1342 2

48
1432 3
1423 3
2134 1
2143 :
2314 :
2341 :
2431 :
Agora é com você!
Exercício 13. Agora fica por sua conta completar a tabela forneci-da no Exemplo 16.
• Determinante
Definição. Dada a matriz de ordem n , ij nA a = , o determinan-
te de A , é definido por:
1 21 2det ( ) ( 1)n
Jj j njA a a a
= −∑
Onde 1 2( )nJ J j j j= indica o número de inversões da permuta-ção 1 2( )nj j j
, indica que o somatório é estendido a todas as 2!n = permutações dos números 1,2, , n .
Exemplo 17. Verifique o uso da definição nos casos dos determi-nantes de ordem 2 e 3.
Solução. Na solução deste exemplo serão usados os resultados ob-tidos no Exemplo 15.
Se 2n = , então 2 = , assim:
1 2
1 2
( ) 0 11 2 11 22 12 21 11 22 12 21det ( ) ( 1) ( 1) ( 1) .J j j
j jA a a a a a a a a a a
= − = − + − = −∑
Se 3n = , 6 = e assim:
1 2 3
1 2 3
( )1 2 3det ( ) ( 1) J j j j
j j jA a a a
= −∑
11 22 33 12 23 31 13 21 32 31 22 13 32 23 11 33 21 21a a a a a a a a a a a a a a a a a a= + + − − −

49
Agora é com você!
Exercício 14. a) Obter o desenvolvimento para o caso de um de-terminante de ordem 4.
b) Verifique a relação desse desenvolvimento com o desenvol-vimento dos cofatores.
• Propriedades do Determinante
Se 1) A possui uma linha (ou colunas) de zeros, então, det ( ) 0A = .
Se 2) A possui duas linhas (ou colunas) iguais, então, det ( ) 0A = .
Se 3) B é obtida de A multiplicando uma linha (ou coluna) por um escalar , então, det ( ) det ( )B A= .
Se 4) B é obtida por troca das posições relativas de duas li-nhas (ou colunas) da matriz A , então, det ( ) det ( )B A= − .
Se 5) B é obtida de A , substituindo a linha i (ou coluna) por ela somada a um múltiplo escalar de outra linha j (ou colu-na) ( )j i≠ então, det ( ) det ( )B A= .
det ( ) det ( ')A A=6) .
det ( ) det ( ) det ( )AB A B=7) .
Observações. Não é objetivo do presente material didático fazer as demonstrações das propriedades anteriores, porém as mesmas podem ser provadas a partir da definição do determinante.
Na seção 1.4.3, ao calcular o determinante usando cofato-res, usamos o desenvolvimento (referidos às linhas) dado por
1det ( )
n
ki kii
A a A=
= ∑ , onde k é um valor fixo. Já foi comentado que o
mesmo resultado pode ser obtido usando as colunas.
Podemos enunciar uma oitava propriedade usando desenvolvi-mentos similares.
Mais detalhes a respeito destas demonstrações
podem ser encontrados no livro de Álgebra Linear do
Callioli, citado no final deste capítulo.

50
10
n
ki lii
a A=
=∑8) , l k≠ , ,k l valores fixos.
Verifiquemos a propriedade com o seguinte exemplo. Se 1k = , 2l = e 2n =
2
1 2 11 21 12 221
i ii
a A a A a A=
= +∑
assim se1 23 4
A =
então,
21 2A = − e 22 1A = ,
dessa forma,
2
1 21
1( 2) 2(1) 0i ii
a A=
= − + =∑ .
Também, ao usarmos o desenvolvimento pelas colunas, en-contramos também que:
2
2 11
2(4) 4( 2) 0k kj
a A=
= + − =∑ .
1.5 Matriz Adjunta: Adj (A)Dada ij n
A a = , a matriz adjunta de A é dada por
( ) ( ) '( )Adj A Cof A= .
Onde ( )Cof A é a matriz cujos elementos são os cofatores ijA da matriz A , ou seja, a matriz onde cada elemento é o cofator ( , )i j do elemento ija da matriz A . Um exemplo para esta definição é o seguinte:
Se 1 22 4
B−
= − , então:
4 2( )
( 2) 1Cof B
− − = − −
.
Assim,'4 2 4 2
( )( 2) 1 2 1
Adj B− − −
= = − − − .

51
Exemplo 18. Calcule a matriz adjunta de A dada por:
2 1 03 1 4
1 6 5A
= −
.
Solução. A matriz de cofatores de A e dada por:
11 12 13
21 22 23
31 32 33
19 19 19( ) 5 10 11
4 8 5
A A ACof A A A A
A A A
− − = = − − −
.
Pois 11 19A = − , 12 19A = , etc.
Assim,( ) ( ) 'Adj A Cof A=
'19 19 195 10 11
4 8 5
− − = − − −
19 5 419 10 819 11 5
− − = − − −
.
Também, o determinante da matriz A , det ( ) 19A = − .
Observe que:
3
19 0 0. ( ) 0 19 0 det ( ).
0 0 19A Adj A A I
− = − = −
Isto é,
3( ). det ( ).Adj A A A I=
Com isso, podemos enunciar o seguinte teorema:
Teorema. Se A é uma matriz de ordem n ,
( ). . ( ) det ( ) nAdj A A A Adj A A I= = .

52
Demonstração.
11 1 11 1
1 1
. ( )n n
n nn n nn
a a A AA Adj A
a a A A
=
( )
( )
( )
( ) ( )
1 1 1 2 1 3 1 111 1 1 1 1
2 1 2 2 2 3 2 211 1 1 1 1
3 1 3 2 3 3 3 311 1 1 1 1
11 11
n n n n n
j j j j j j j j njn jj j j j j
n n n n n
j j j j j j j j njn jj j j j j
n n n n n
j j j j j j j j njn jj j j j j
n
jn j n jj
a A a A a A a A a A
a A a A a A a A a A
a A a A a A a A a A
a A a A
−= = = = =
−= = = = =
−= = = = =
− −=
=
∑ ∑ ∑ ∑ ∑
∑ ∑ ∑ ∑ ∑
∑ ∑ ∑ ∑ ∑
∑
( ) ( ) ( ) ( )
( )
2 31 1 1 11 1 1 1
1 2 3 11 1 1 1 1
n n n n
j j njn j n j n j n jj j j j
n n n n n
nj j nj j nj j nj nj njn jj j j j j
a A a A a A
a A a A a A a A a A
− − − −= = = =
−= = = = =
∑ ∑ ∑ ∑
∑ ∑ ∑ ∑ ∑
Usando a Propriedade 8 dos determinantes nos elementos fora da diagonal principal, temos:
1 11
2 21
3 31
1
0 0 0
0 0 0
. ( )0 0 0
0 0 0
n
j jj
n
j jj
n
j jj
n
nj njj
a A
a A
A Adj Aa A
a A
=
=
=
=
=
∑
∑
∑
∑
Pelo desenvolvimento de Laplace (por linhas) temos o valor do de-terminante:
1det ( )
n
kj kjj
A a A=
= ∑ , para cada 1,2, ,k n=

53
isto é:
det ( ) 0 00 det ( ) 0
. ( )
0 0 det ( )
AA
A Adj A
A
=
,
det ( ) nA I= .
De forma similar, pode se encontrar
( ). det ( ) nAdj A A A I= .
Assim, temos demonstrado que
. ( ) ( ). det ( ) nA Adj A Adj A A A I= = .
1.6 Inversa de uma Matriz
1.6.1 Matriz Singular
Definição. Uma matriz é dita singular se o seu determinante é nulo. Caso contrário, dizemos que a matriz é não singular.
Por exemplo, a matriz1 22 4
B−
= −
é uma matriz singular pois det ( ) 0B = .
Já, a matriz identidade de ordem 3 é não singular, pois 3det ( ) 1I = . Em geral uma matriz identidade de ordem qualquer é não singular.
1.6.2 Matriz Inversa
Definição. Seja A uma matriz quadrada de ordem n . Dizemos que A é inversível se existe uma única matriz B (da mesma or-dem) tal que:
nAB BA I= = .
B é denominada matriz inversa de A .
Você saberia dizer por quê? Pense a respeito!

54
Notação. 1B A−= .
Por exemplo, se 2 1
0 3A
− =
a matriz
1 12 6
10 3B
− =
é a respec-
tiva matriz inversa, pois:
1 00 1
AB BA = =
.
Propriedade. Se A é inversível, então, A é não singular.
Prova. Será suficiente encontrar que o det ( )A não é nulo. De-monstrando por absurdo, supomos o contrário, isto é, det ( ) 0A = , e devemos chegar numa contradição.
Assim usando a Propriedade 7 dos determinantes:
det ( ) det ( ).det ( )AB A B=
0.det ( )B=
0= .
Por outro lado, termos por hipótese que A é inversível, então exis-te B tal que AB I= , assim
det ( ) det ( )AB I=
1= .
Assim, 0 1= , impossível, é uma contradição!
Uma vez que a contradição foi encontrada, então o enunciado é verdadeiro. Assim a propriedade fica demonstrada. Logo, A é não singular.
Conhecendo que det ( ) 0A ≠ , para A inversível, uma forma de verificar a existência da matriz inversa será encontrar o valor do determinante da matriz. Após essa verificação, o passo seguin-te será encontrarmos a matriz inversa, 1A− . Como exemplo, nos
casos das matrizes 2 1
0 3A
− =
e
1 22 4
B−
= − , podemos afirmar
que apenas A possui inversa.
Como obtermos 1A− ?
Geralmente uma contradição é denotada pelo símbolo ⇒⇐ . O mesmo poderá ser usado nas próximas provas.

55
1.6.3 Cálculo da Matriz Inversa usando a Matriz Adjunta
Sabendo que existe 1A− , então,
1 1AA A A I− −= = .
Observe pela propriedade da matriz adjunta que
( ) ( ). .det ( ) det ( ) nAdj A Adj AA A I
A A
= =
.
Assim,, a única possibilidade será:
1 ( )det ( )Adj AA
A− = .
Exemplo 19. Se 2 1
0 3A
− =
, encontrar 1A− .
Solução. Encontramos facilmente que det ( ) 6A = − , e também a matriz adjunta
3 0( )
1 2Adj A
= − − ,
Assim,
11 1( ) 2 6
1det ( ) 0 3
Adj AAA
−−
= =
.
Agora é com você!
Exercício 15. Seja 2 1 03 1 4
1 6 5A
= −
, verifique se sua matriz inversa é
1
5 41 19 1910 81 19 19
5111 19 19
A−
− −= − −
.

56
1.6.4 Propriedades da Inversa de uma Matriz
Se A e B são inversíveis, então:
1 1 1( )AB B A− − −=1)
1 1( )A A− − =2)
1 1( ) ( )t tA A− −=3)
1 1det ( )det ( )
AA
− =4)
• Prova da Propriedade 1
1 1 1( )AB B A− − −=
Em primeiro lugar, vejamos se existe 1( )AB − . Calculando det ( )AB :
det ( ) det ( ) det ( )AB A B= .
Por hipótese existem as inversas das matrizes A e B ( 1 A−∃ , 1 B−∃ ), isto é, det ( ) 0A ≠ e det ( ) 0B ≠ . Assim det ( ) 0AB ≠ e com isso
1 ( )AB −∃ , isto é,
1( ) ( )AB AB I− = . (1)
Como 1A A I−⋅ = e 1B B I−⋅ = .
Na segunda parte desta última relação, multiplicamos em ambos os lados pela inversa de A (pela direita)
1 1 1( )B B A I A− − −⋅ ⋅ = ⋅
Associando e multiplicando por I ,
1 1 1( )B B A A− − −⋅ ⋅ = ,
multiplicando à esquerda por A :
1 1 1( )( )A B B A A A− − −⋅ ⋅ ⋅ = ⋅ ,
associando novamente e sabendo que 1AA I− = ,
(2)
Você também pode consi-derar os seguintes passos após a expressão (2):

57
Sendo que a existência da matriz inversa é única e comparando as expressões (1) e (2) concluímos que
1 1 1( ) ( )AB B A− − −= .
Agora é com você!
Exercício 16. Demonstre as outras propriedades, justificando o seu procedimento.
Ao calcular a matriz inversa de A , usando a matriz adjunta vi-
mos que 1 ( )det ( )Adj AA
A− = , e nos exemplos aplicamos essa relação
para matrizes de ordem 2 e 3. E se 4n = ou 5n = ? O procedi-mento acaba sendo mais tedioso para matrizes dessas ordens ou de ordem superior. Vejamos agora como podemos obter es-sas matrizes de uma outra forma.
1.6.3 Cálculo da Matriz Inversa por Operações Elementares
Seja A uma matriz não singular, portanto existe 1A− e det ( ) 0A ≠ . Por definição, sabemos que
1 1AA A A I− −= = .
Então, a idéia é encontrarmos uma matriz que ao ser multiplicada por A (à direita ou á esquerda) resulte a matriz identidade. Para conseguir esse objetivo, sem necessidade de usar conceito de ma-triz adjunta, forneceremos alguns conceitos a seguir.
Por exemplo, as mudanças efetuadas numa matriz identidade for-neceram a definição de uma matriz elementar. Em termos gerais, qualquer mudança do mesmo tipo fornecerá o que definiremos agora de operação elementar em uma matriz.
• Operações Elementares
Uma operação elementar por linha (ou coluna) numa matriz é a mudança efetuada na matriz de tal forma que seja efetuada:

58
a troca de uma linha (ou coluna) por outra linha (ou coluna); 1)
a multiplicação de uma linha (ou coluna) por um valor2) ∈ , com 0 ≠ ;
a soma de uma linha (ou coluna) multiplicada pelo valor3) ∈ , ( 0 ≠ ) numa outra linha (ou coluna).
Se il e jl representam a linhas i e j da matriz e é o escalar ci-tado anteriormente, então, as operações elementares dadas acima serão denotadas respectivamente por:
i jl l↔1) ,
il2) ,
j i jl l l← +3) .
Seja A uma matriz, se uma (ou várias) operação elementar for efe-tuada nessa matriz, obteremos uma matriz diferente, que a deno-taremos com à . Assim o processo efetuado será denotado por:
( )( )
operação çõeselementar esA Ã→
Exemplos:
Foi feita uma operação elementar na matriz identidade de a) ordem 2, 2I , ao trocarmos a linha 1 pela linha 2 da matriz obtendo a seguinte matriz elementar:
0 11 0
à =
.
a operação efetuada é denotada por
1 22
l lI Ã↔→ .
Dada a matriz de ordem 4 b)
1 0 6 10 1 0 03 0 2 00 1 0 1
A
= − −
.

59
Ao fazermos a operação elementar que multiplica na linha 3 da matriz por –2, obtemos a seguinte matriz:
1 0 6 10 1 0 06 0 4 0
0 1 0 1
Ã
= − −
.
Indicamos isso com:
( ) 32
1 0 6 10 1 0 06 0 4 0
0 1 0 1
IA −
→ − −
.
Dada a matriz de ordem 3,c)
1 8 20 1 05 1 3
B = −
,
ao fazermos duas operações elementares, obtemos a seguin-te matriz B :
( )2 3 2
1
33
3 24 615 2 95 1 3
l l llB B← − +
→ − − = −
Assim, a matriz B foi obtida:
multiplicando a linha 3 por –3 e somando-la na linha 2 •da matriz B,
multiplicando a linha 1 por 3.•
Observação. A operação elementar 2 3 2( 3)l l l← − + indica a linha onde a soma das linhas está acontecendo. No caso, a soma será efetuada na linha 2 da matriz.

60
Agora é com você!
Exercício 17. Dadas as matrizes 2 0
0 2A
− = −
e
1 0 0 00 1 0 01 0 1 00 0 0 1
B
=
,
encontre à e B , após as operações elementares efetuadas em A e
B respectivamente. As operações são indicadas por: 1 2
12l l
lA Ã↔→
e 4 3 4
21 2
25
l l ll
l lB B← +
−↔
→ .
Exercício 18. Quais operações elementares devem ser feitas de modo a levar a matriz C na sua forma triangular superior?
1 3 30 1 11 2 0
C =
.
• Forma Escada de uma Matriz
Ao efetuarmos operações elementares por linhas numa matriz dizemos que ela está na forma escada se, após operações elemen-tares na matriz inicial, na matriz resultante obtém-se:
O primeiro elemento não nulo de uma linha não nula deve a) ser igual a 1.
Na coluna que contém o primeiro elemento não nulo de al-b) guma linha tem todos os seus outros elementos (da coluna) iguais à zero.
Toda linha nula ocorre abaixo de todas as linhas não nu-c) las (isto é, daquelas que possuem pelo menos um elemento não nulo).
Se as linhas d) 1, , r , são linhas não nulas, e se o primeiro ele-mento não nulo da linha i ocorre na coluna ik (a coluna k referida à linha i ), então, 1 2 rk k k< < < . (Exemplo se 1i = e 1 3k = , então para 2i = , 1 2k k< significa que 2k será maior que 3 e assim por diante).

61
Exemplos:
As seguintes matrizes encontram-se na forma escada:
0 1 00 0 0
A =
,
1 1 00 1 00 0 1
B−
=
,
1 1 0 00 1 1 00 0 1 30 0 0 1
C
− =
.
Já as seguintes matrizes não estão na forma escada:
0 1 01 0 00 0 1
D =
,
1 1 0 00 1 1 00 1 1 10 0 0 0
E
= −
.
Agora é com você!
Exercício 19. Deixamos para você a explicação do porquê as ma-trizes , , , e A B C D E encontram-se ou não na forma escada redu-zida por linhas.
Observações:
Na prática, a forma escada serve para levar uma matriz 1) na sua forma triangular, na qual os elementos da diagonal principal sejam uns ou zeros.
A prática de reduzir uma matriz usando operações elemen-2) tares é um exercício muito útil para obter a inversa de uma matriz e resolver sistemas lineares.
• Operações Elementares versus Matrizes Elementares
Operações elementares dão origem a matrizes elementares (de-finidas na seção 1.2) e o produto da seqüência de tais matrizes nos conduzirá a matriz inversa. Veremos isso com os exemplos e exercícios seguintes.
Exemplo 20. Dada a matriz A , convertê-la numa matriz triangu-lar superior.

62
1 2 3 40 0 1 11 2 0 01 1 9 3
A
− = −
Solução.
1 2 3 40 0 1 11 2 0 01 1 9 3
− −
3 1 3
4 1 4
l l ll l l←− +← +→
1 2 3 40 0 1 10 0 3 40 3 12 7
− − −
2 4
23
l ll↔→
4 3l l↔→
1 2 3 470 1 43
0 0 1 10 0 3 4
−
− −
4 3 4
4
3
7
l l ll
← +−→
1 2 3 470 1 43
0 0 1 10 0 0 1
Ã
= −
.
Assim, Ã é uma matriz triangular superior.
Exemplo 21. Encontre matrizes elementares que representam as operações elementares efetuadas no Exemplo 20.
Solução. No Exemplo 20, foram efetuadas sete operações elemen-tares. Cada uma delas representará, respectivamente, as matrizes elementares 1 7, ,E E . Assim a primeira operação 3 1 3l l l← − + dá origem a matriz elementar:
1
1 0 0 00 1 0 01 0 1 0
0 0 0 1
E
= −
.
Também a operação elementar 4 1 4l l l← + origina a matriz ele-mentar:
2
1 0 0 00 1 0 00 0 1 01 0 0 1
E
=
,
1 2 3 470 1 43
0 0 3 40 0 1 1
− −
−

63
similarmente, as operações elementares 2 4l l↔ e 2
3l
originam as matrizes elementares
3
1 0 0 00 0 0 10 0 1 00 1 0 0
E
=
, 4
1 0 0 010 0 03
0 0 1 00 0 0 1
E
=
.
Agora é com você!
Exercício 20. Quais foram as matrizes 5 6 7, ,E E E no exemplo an-terior?
Observe que nas matrizes do Exemplo 21
1
1 2 3 40 0 1 10 0 3 41 1 9 3
E A
− = − − −
e 2 1 2
1 2 3 40 0 1 1
( )0 0 3 41 1 9 3
E E A E
− = − − −
,
isto é,
2 1
1 2 3 40 0 1 10 0 3 40 3 12 7
E E A
− = − −
.
Similarmente,
3 2 1 3
1 2 3 4 1 2 3 40 0 1 1 0 3 12 7
( )0 0 3 4 0 0 3 40 3 12 7 0 0 1 1
E E E A E
− = = − − − − −
e
4 3 2 1
1 2 3 470 1 43
0 0 3 40 0 1 1
E E E E A
= − −
−
,

64
repetindo o processo, chegamos ao seguinte resultado:
7 6 5 4 3 2 1
1 2 3 470 1 43
0 0 1 10 0 0 1
E E E E E E E A
= −
.
Que é a matriz triangular superior obtida no Exemplo 20.
Agora usaremos os conceitos anteriores para aprender a calcu-lar a matriz inversa usando operações elementares.
O Exemplo 21 exibiu como ocorre o processo de redução de uma matriz de ordem 4 na sua forma triangular superior. Em geral esse será o processo para reduzir matrizes de ordem maior. Assim, se A é uma matriz não singular, encontraremos as matrizes elemen-tares que levam a matriz na forma de uma matriz identidade, isto é, encontraremos as matrizes elementares 1 2, , , kE E E tais que
3 2 1kE E E E A I= .
Assim, se 3 2 1kB E E E E= estaremos afirmando que
BA I= .
Com isso e usando a definição de matriz inversa, a inversa da matriz será dada por
13 2 1kA E E E E− = .
A matriz inversa não é mais do que o produto de matrizes ele-mentares!
Ilustremos esse processo com o seguinte exemplo:
Exemplo 22. Usando matrizes elementares, obter a matriz inversa da matriz:
1 2 3 40 0 1 11 2 0 01 1 9 3
A
− = −
.

65
Solução. Usando os resultados obtidos no Exemplo 21 (onde se encontraram 7 matrizes elementares,
1 7, ,E E , para reduzir a matriz na forma triangular superior) ob-tivemos que
1 2 3 40 0 1 11 2 0 01 1 9 3
A
− = −
operaçõeselementares→
1 2 3 470 1 43
0 0 1 10 0 0 1
−
.
Continuando o processo
1 2 3 470 1 43
0 0 1 10 0 0 1
−
3 4 3
42 2
73
l l lll l
← +−
← +→
1 2 3 40 1 4 00 0 1 00 0 0 1
1 4 1
2 3 2
44
l l ll l l
←− +←− +→
1 2 3 00 1 0 00 0 1 00 0 0 1
1 3 1
1 2 1
32
l l ll l l
←− +←− +→
1 0 0 00 1 0 00 0 1 00 0 0 1
I
=
.
Serão construídas mais 6 matrizes elementares 8 9 13, , ,E E E , e deixamos para você a tarefa de explicitá-las!
Temos então,
13 12 8 7 1E E E E E A I= ,
e assim,
13 12 8 7 1B E E E E E= .
Isto é,
1BA I A B−= ⇒ = .

66
Após fazermos o produto, a matriz pedida é:
113 8 1
8 18 17 27 7 21 34 9 19 1
7 7 21 3, , , ,1 4 1 07 7 71 3 1 07 7 7
A E E E−
− −
− −
= = − − −
.
Observações:
•Aotentarresolveroexemplo,vocêpodeveri-ficar que o conjunto de matrizes elementares encontradas no processo de escalonamento não será o único, pois dependerá da escolha das operações elementares efetuadas, não obstante a matriz inversa será a mesma, após terminado o processo, será a mesma.
•Fizemosquestãodeexibirumexemplocomuma matriz de ordem 4 com o objetivo de facilitar a compreensão do método, além de colocar uma prática que usualmente não se expõe em livros da literatura disponível.
• Um método prático
O processo anterior foi explicado para que você entenda passo a passo, como uma matriz é reduzida até ser obtida a matriz identi-dade. Na prática, toda vez que se queira obter a matriz inversa de uma matriz não singular, se procede da seguinte forma:
operações 1elementares[ ] [ ]A I I A−→ ,
ou seja, acrescentamos à direita uma matriz identidade da mes-ma ordem da matriz, se faz o processo de redução e o último resultado terá uma matriz identidade à esquerda e à direita terá a inversa da matriz dada.

67
Exemplo 23. Use o método prático para obter matriz inversa do Exemplo 22.
Solução.
assim,
1
8 18 17 27 7 21 34 9 19 1
7 7 21 31 4 1 07 7 71 3 1 07 7 7
A−
− −
− −
= − − −
.

68
Agora é com você!
Exercício 21. Use o método anterior para encontrar as matrizes inversas:
da matriz a) A fornecida no Exemplo 19
das matrizes b) A e B dadas no Exercício 3.
Exercícios Propostos
1) Dadas as matrizes, 1 2 12 3 2
1 4 5A
− = − −
, 1 0 32 1 43 1 17
B = − − − −
encontre
2C A B= +a)
2C B=b)
( )tr Ac) , ( )tr B e ( )tr AB .
Expresse as matrizes d) A e B como somas de uma matriz simétrica com outra anti-simétrica.
2) Sejam as matrizes A e B , de ordem 4. 4ijA a = com
se0 se
i
ijj i j
ai j
≥=
<, B uma matriz simétrica com ijb i j= + se i j≤ .
Encontre:
2 3C A B= −a) .
2C B=b) , C é uma matriz simétrica?
3) Se A e B são matrizes simétricas, justifique a verdade ou falsidade dos seguintes enunciados:
A B+a) é uma matriz simétrica.
ABb) é uma matriz simétrica.
Nota. Se sua resposta for verdade, prove. Caso contrário, exiba um contra-exemplo.

69
4) Quais são os valores de b para a matriz
1 1 1 11 1
1 1 11 1
b bA
bb b
=
ser simétrica?
5) Encontre o determinante, posto e nulidade das matrizes:
2 1 3 43 2 4 52 2 1 02 1 3 1
A
= −
,
1 1 2 12 3 0 21 1 2 2
1 2 1 1
B
− − = −
, 1 0 32 1 46 1 17
C = − − − −
Nota. Ao calcular o determinante use as operações elementares e o método de Laplace.
6) Considerando as matrizes dadas no Exercício 5, encontre a matriz inversa, se possível.
7) Usando apenas propriedades dos determinantes mostre que det ( ) det ( )A B= . As matrizes são
22
a c aA
b d b+
= + ,
a cB
b d
=
.
8) Crie situações do cotidiano e monte um enunciado para for-mular um problema. Nele deve fazer uso:
da soma de matrizesa)
da subtração de matrizesb)
do produto de matrizesc)

70
Resumo
Neste capítulo inserimos os conceitos básicos para a construção de todo o conteúdo deste livro. Em particular, quando falamos de matrizes, o aluno além de lembrar muitos conceitos já aprendidos no ensino médio, foi levado à reflexão e observação de proprieda-des antes desconhecidas, com a intenção de despertar a sua capa-cidade lógica e porque não dizer a sua capacidade de abstração, uma preparação aos conceitos que serão vistos no capítulo dos espaços vetoriais.
O aluno poderá encontrar também muita informação dos conte-údos aqui fornecidos (e também os conteúdos dos próximos capí-tulos) ao navegar na internet. Um exemplo, entre outros, que lhe pode ser útil é dado ao acessar:
<http://pt.wikibooks.org/wiki/Matem%C3%A1tica_Elementar:_Matrizes>.
Neste ponto dos conteúdos teóricos dados achamos conveniente fornecer à você um resumo simplificado das propriedades forne-cidas até aqui. O mesmo servirá como material de apoio para o desenvolvimento dos exercícios de prova.
Propriedades das Matrizes
Adição de matrizes
Sejam ij m nA a
× = , ij m n
B b×
= e ij m nC c
× = , então:
Comutatividade: • A B B A+ = +
Associatividade: • ( ) ( )A B C A B C+ + = + +
Elemento neutro: • A O A+ =
Elemento Oposto: • ( )A A O+ − =
Produto de uma matriz por um escalar
Dados ij m nA a
× = , ij m n
B b×
= e ∈ (um escalar real), então:
Distributividade: • ( )A B A B + = +
Distributividade: • ( ) A A A + = +
Esse material de apoio assim como algumas atividades serão encontradas no ambiente virtual de aprendizagem.

71
Associatividade: • ( ) ( )A A =
0.A O=•
Produto de Matrizes
Dados , kj p nB b
× = e jlC c = (ordem conveniente),
então:
( ) ( )A BC AB C=•
( )A B C AB AC+ = +•
( )A B C AC BC+ = +•
( ) ( ) ( )AB A B A B = =• , ∈ . (Um escalar real)
Observe que em geral AB BA≠ . Também AB O= , não implica A O= ou B O= .
Transposta de uma Matriz
Dados ij m nA a
× = , ij n p
B b×
= , então:
( ') 'A A=•
( ) ' ' 'A B A B+ = +•
( ) ' ' 'AB B A=•
( ) ' ',A A = ∈• , ∈
Traço de uma Matriz
( ) ( ) ( )Tr A B Tr A Tr B+ = +•
( ) ( )Tr A Tr A =•
( ) ( ')Tr A Tr A=•
( ) ( )Tr AB Tr BA=•
Inversa de uma matriz 1 1 1( )AB B A− − −=•
1 1( )A A− − =•
1 1( ) ( )t tA A− −=•
1 1det ( )det ( )
AA
− =•

72
Bibliografia Comentada
BOLDRINI, José et al. Álgebra linear. 3. ed. São Paulo: Harbra, 1980.
Esta referência auxiliará para complementar e estender alguns conceitos não apresentados que você possa estar interessado em aprofundar.
KÜHLKAMP, Nilo. Matrizes e sistemas de equações lineares. Florianópo-lis: Ed. UFSC, 2005.
Este livro , editado por um colega nosso possui múltiplos exemplos e problemas práticos aos quais o aluno pode consultar e assim acrescentar a sua prática. Também, se o aluno tiver o interesse, pode conhecer algumas das aplicações e problemas de matrizes e sistemas lineares.
SANTOS, Reginaldo. Um curso de geometria analítica e álgebra linear. Belo Horizonte: Ed. UFMG, 2001.
Esta referência é muito útil para aplicar os conceitos usando alguns recursos computacionais, assim como os detalhes de algumas provas úteis aos quais o aluno pode recorrer.
CALLIOLI, C. A. et al. Álgebra linear e aplicações. 6. ed. [S.l.]: Atual Editora, 2003.
Neste livro, além de contar com os conteúdos da Álgebra Linear e Aplicações, você encontrará as provas das propriedades do determinante de uma matriz usando a definição.

2 Sistemas Lineares


75
2 Sistemas Lineares
Este capítulo tem como objetivo fundamental fornecer as ferramentas necessárias que serão usadas nos próximos ca-pítulos. Para tal, apresentamos, na primeira seção, alguns conceitos trabalhados na matéria de Geometria Analítica, para motivar os conceitos que serão fornecidos logo depois e estabelecer sua conexão com os sistemas lineares de qual-quer ordem. Para um melhor entendimento do conteúdo, consideramos que você conheça algumas questões básicas, como os métodos convencionais para resolver sistemas de ordem dois e três, a regra de Cramer entre outros. A par-tir disso, levamos ao questionamento de o que fazer em casos onde esses métodos não são aplicáveis.
2.1 PreliminaresAntes de iniciarmos, lembraremos alguns conceitos de geometria analítica que serão importantes para entender melhor o conteúdo que será dado neste capítulo.
Uma vez que retas e planos são subconjuntos de 3 , fornecere-
mos as notações das retas dadas pelos eixos coordenados e dos planos dados pelos planos coordenados.
Lembremos a notação de um ponto P qualquer do espaço com coordenadas ,x y e z :
3( , , )P P x y z= ∈ .
Já, a notação de um vetor a com componentes 1 2 3, ,a a a é dada por:
1 2 3( , , )a a a a= .
A regra de Cramer é um teorema em álgebra
linear que dá a solução de um sistema de equações
lineares em termos de determinantes. Recebe este
nome em homenagem a Gabriel Cramer
(1704-1752).

76
0
( , , )a OP x y z= =
Figura 2.1 - O ponto P e o vetor a
2.1.1 Eixos coordenados
Os eixos coordenados são denotados na seguinte forma vetorial:
• Eixo X 3
x£ {x / x (1,0,0), } = ∈ = ∈
Figura 2.2 - O eixo coordenado X
• Eixo Y3
y£ {y / y (0,1,0), } = ∈ = ∈
Figura 2.3 - O eixo coordenado Y

77
• Eixo Z3
z£ {z / z (0,0,1), } = ∈ = ∈
Figura 2.4 - O eixo coordenado Z
2.1.2 Planos Coordenados
As formas vetoriais e cartesianas dos planos coordenados são da-das, respectivamente, da seguinte maneira:
• Plano XY
3xy {x / x (1,0,0) (0,1,0), , } Π = ∈ = + ∈
ou
xy {(x, y, z) / z 0}Π = =
Figura 2.5 - O plano xyΠ
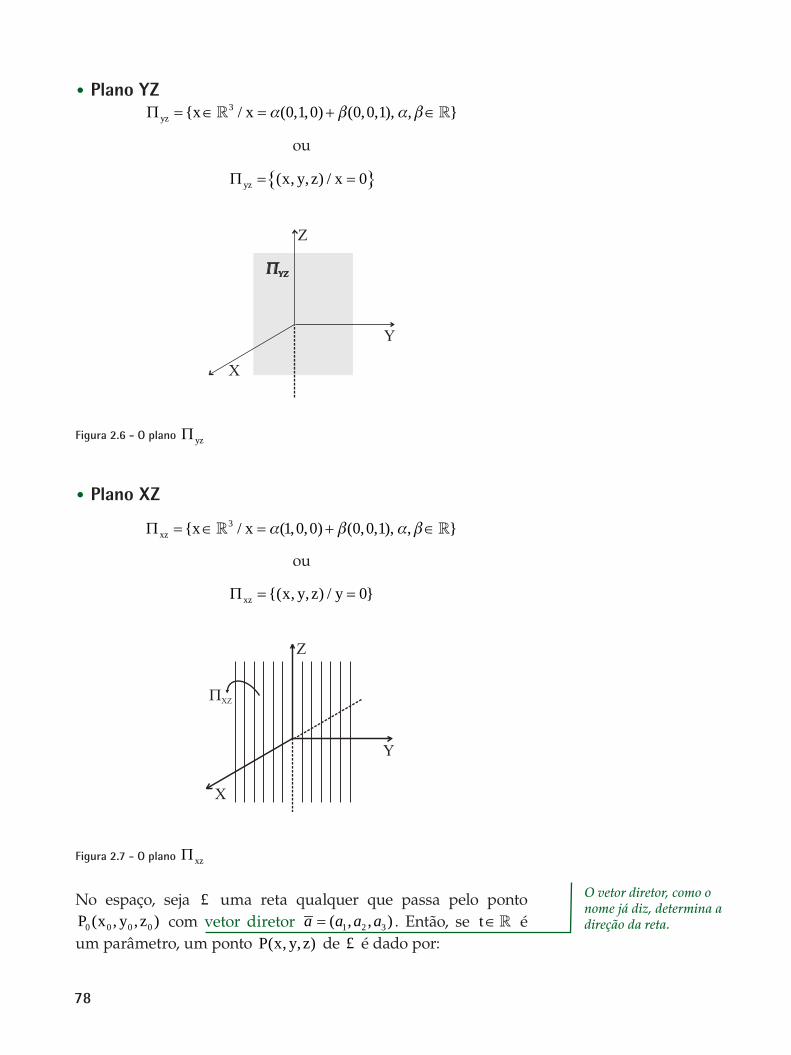
78
• Plano YZ3
yz {x / x (0,1,0) (0,0,1), , } Π = ∈ = + ∈
ou
{ }yz (x, y, z) / x 0Π = =
Figura 2.6 - O plano yzΠ
• Plano XZ3
xz {x / x (1,0,0) (0,0,1), , } Π = ∈ = + ∈
ou
xz {(x, y, z) / y 0}Π = =
Figura 2.7 - O plano xzΠ
No espaço, seja £ uma reta qualquer que passa pelo ponto
0 0 0 0P (x , y , z ) com vetor diretor 1 2 3( , , )a a a a= . Então, se t∈ é um parâmetro, um ponto P(x, y, z) de £ é dado por:
O vetor diretor, como o nome já diz, determina a direção da reta.

79
0 1x x ta= +
0 2y y ta= +
0 3z z ta= +
Esta equação é conhecida como a equação paramétrica da reta.
Observação: Navegando na internet ou usando o ambiente virtual, poderemos
encontrar alguns applets que mostram de uma forma animada o comportamento do parâme-tro. Tais animações encontram-se no sítio do colega Humberto José Bortolossi, da Universi-dade Federal Fluminense. Veja em:
<http://www.professores.uff.br/hjbortol/cederj/ applets/car/mgal-equacoes-parametricas-01.html>
Exemplo 1. Seja £ reta que passa pelo ponto (1,1, 2) e vetor dire-tor (1, 1,0)a = − . Encontre uma forma de equacionar £ que não envolva o parâmetro t .
Solução. A equação paramétrica de £ é:
x 1 x 1t t= + ⇒ = −
y 1 1 (x 1) 2 xt y= − ⇒ = − − = −
z 2 0 2 z 2t= + = ⇒ =
Assim, t∈ implica x∈ . Isto é, a reta pode ser equacionada na forma:
y 2 x£ :
z 2= −
=
ε
Figura 2.8 - Gráfico da reta £ do Exemplo 1
São equações equivalentes à equação geral da reta,
da forma x = f(t), y = g(t) e z = h(t), que relacionam
as coordenadas x , y e z dos pontos da reta com um
parâmetro t.Fonte:
<www.somatematica.com.br>

80
A equação cartesiana (ou geral) do plano Π que passa pelo ponto
0 0 0 0P (x , y , z ) e vetor normal (a, b,c)n = é dada por:
: ax by cz dΠ + + =
Exemplo 2. O plano definido pela face do tetraedro com vértice na origem (e no octante X Y Z+ + + ), como indicado na Figura 2.9, tem a equação:
: x y z 1Π + + =
Figura 2.9 - Plano definido pela face de tetraedro com vértice na origem
Agora é sua vez!
Verifique se você está acompanhando as discussões que fizemos. Resolva o exercício que deixamos abaixo:
Exercício 1. Encontre dois vetores do plano Π , mostrado na Figura 2.9 do Exemplo 2, e verifique que a equação é dada por x y z 1+ + = .
Exemplo 3. A reta £ do Exemplo 1 pode ser considerada como sendo a intersecção do plano 1 : x y 2Π + = e o plano 2 : z 2Π = , paralelo ao plano cartesiano xyΠ , conforme ilustrado na figura.
ε
Figura 2.10 - A reta £ obtida como interseção de dois planos

81
Com o desenvolvimento desta seção (onde os conceitos se origina-ram na Geometria Analítica) e antes de iniciarmos a formulação algébrica dos sistemas lineares, colocaremos as várias possibili-dades de posições relativas entre retas e planos e os respectivos conjuntos solução. Logo depois, veremos a conexão dessa seção com a formulação algébrica a ser fornecida neste capítulo.
2.2 Sistemas Lineares
Retas em 2
Em 2 , uma reta com os seus infinitos pares de pontos (x, y) é
equacionada na forma
ax by c+ = (1)
As posições relativas entre duas retas no plano são:
Concorrentesa) , isto é, a intersecção é um ponto. Assim, da-das duas equações, existe uma única solução.
Coincidentesb) , isto é, as retas são iguais. Isso equivale a di-zer que há muitas (ou, mais apropriadamente falando, in-finitas!) soluções ou ao resolver as duas equações existem infinitas soluções.
Paralelasc) , isto é, não há intersecção entre elas. Quer dizer que a solução dada por duas equações é o conjunto vazio (ou não existe solução).
ε ε ε ε εε
ε
ε
ε ε εε
Figura 2.11 - Posições relativas de retas no plano
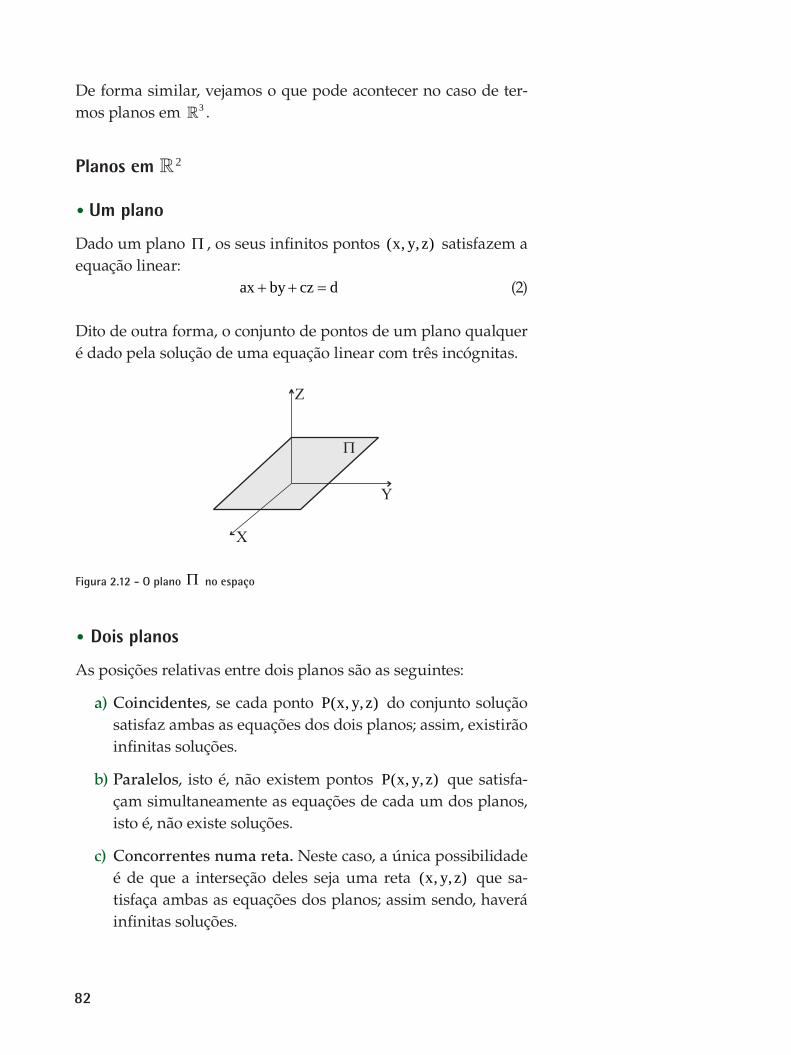
82
De forma similar, vejamos o que pode acontecer no caso de ter-mos planos em 3
.
Planos em 2
• Um plano
Dado um plano Π , os seus infinitos pontos (x, y, z) satisfazem a equação linear:
ax by cz d+ + = (2)
Dito de outra forma, o conjunto de pontos de um plano qualquer é dado pela solução de uma equação linear com três incógnitas.
Figura 2.12 - O plano Π no espaço
• Dois planos
As posições relativas entre dois planos são as seguintes:
Coincidentesa) , se cada ponto P(x, y, z) do conjunto solução satisfaz ambas as equações dos dois planos; assim, existirão infinitas soluções.
Paralelosb) , isto é, não existem pontos P(x, y, z) que satisfa-çam simultaneamente as equações de cada um dos planos, isto é, não existe soluções.
Concorrentes numa reta.c) Neste caso, a única possibilidade é de que a interseção deles seja uma reta (x, y, z) que sa-tisfaça ambas as equações dos planos; assim sendo, haverá infinitas soluções.

83
ε
Figura 2.13 - Posições relativas de dois planos no espaço
• Três Planos
As posições relativas entre três planos são as seguintes:
Concorrentes num ponto.a) Existe uma única possibilidade para que as equações dos planos sejam satisfeitas simulta-neamente, isto é, existe uma única solução. Observe na Fi-gura 2.14. Uma forma prática de visualizar esta situação é olharmos para uma esquina qualquer de uma sala de aula, na qual as paredes são consideradas como três pedaços de planos (Figura 2.15)
Interseção vazia.b) Não há pontos (x, y, z) satisfazendo simul-taneamente as equações dos planos e é dito que a interseção é vazia; assim, não existe solução. Nesta situação, um exemplo prático é olhar três faces quaisquer de um tijolo (cuja forma é um paralelepípedo), como indicado na Figura 2.15.
Figura 2.14 Planos concorrentes num ponto Figura 2.15 Planos não-concorrentes

84
Concorrentes numa retac) , isto é, a interseção dos planos é uma reta; portanto, existem infinitas soluções. Neste caso, um exemplo prático é observarmos um livro aberto em que as folhas representam pedaços de planos que se interceptam na lombada (e claro, teremos que imaginar uma lombada muito fina!). Assim a lombada seria um pedaço da reta interseção.
ε
ε
Figura 2.16 - Planos concorrentes numa reta
Em cada uma das situações dadas anteriormente, procura-se o conjunto solução de equações em duas 1 2(x , x ) ou três incógnitas
1 2 3(x , x , x ) , como foram dadas nas equações (1) e (2), respectiva-mente. Elas podem se encontrar na forma:
11 1 12 2 1
21 1 22 2 2
x xx x
a a ba a b
+ =+ =
,
para o caso da interseção de duas retas em 2 , ou na forma:
11 1 12 2 13 3 1
21 1 22 2 23 3 2
a x a x a x ba x a x a x b
+ + =+ + =
,
no caso de termos a interseção de três planos.
Dadas m equações com n incógnitas, um sistema linear, em ge-ral, é dado na forma:
11 1 12 2 1 1
21 1 22 2 2 2
1 1 2 2
x x xx x x
x x x
n n
n n
m m mn n m
a a a ba a a b
a a a b
+ + + =+ + + =
+ + + =
(SLg)
Em que SLg indica um Sistema Linear geral.
No ambiente virtual serão exibidas essas e outras situações práticas do nosso cotidiano que ilustram as posições relativas de retas e planos.

85
Assim, seA [a ]m n ij m n× ×= , 1 1X [x ]n i n× ×= e 1 1B [b ]m i m× ×= ,
o sistema dado pode ser representado matricialmente por
1 1A X Bm n n m× × ×= ,
ou, simplesmente,AX B= (SLm) .
Em que SLm indica um Sistema Linear na forma matricial.
A matriz A é conhecida como matriz de coeficientes, X é a ma-triz das incógnitas e B , a matriz dos termos independentes.
Observação. A ordem da matriz de coeficientes define a ordem do sistema. No caso, o sistema AX B= é de ordem m n× .
São exemplos de sistemas lineares:
9 24 0
x yx y
− =+ =
(1), 2 3 1x y z− + = (2), 10
7 2
x y zx zy z
+ + =− =+ =
(3)
onde (1) é um sistema de duas equações com duas incógnitas e (2) é um sistema de uma equação com três incógnitas. Já o sistema (3) possui três equações e três incógnitas.
Agora é com você!
Exercício 2. Com o intuito de verificar se você lembra do conte-údo da seção anterior, forneça uma interpretação geométrica dos sistemas lineares dados nos últimos exemplos.
No ensino médio, você ficou familiarizado com a solução de siste-mas de ordem dois ou três (e com duas ou três incógnitas), onde métodos convencionais ou a regra de Cramer sempre eram pos-síveis de serem aplicados. Existem sistemas onde isso pode não acontecer, por exemplo:
Exemplo 4. Resolver o seguinte sistema linear de equações de or-dem 3:
3 47 2 1
2 6 5
x y zx y zx y z
− + =− + − =
+ − =

86
Solução. Usaremos métodos convencionais para resolver o sistema.
Numerando cada equação:
3 47 2 1
2 6 5
x y zx y zx y z
− + =− + − =
+ − =
isolando z de (3), 2 6 5z x y= + − , e substituindo em (1) e (2), obtemos:
3 2 6 5 47 2(2 6 5) 1
x y x yx y x y− + + − =
− + − + − = ⇒ 5 5 9
5 5 9x y
x y+ =
− − = − (4)
Na última expressão, a primeira equação é igual à segunda, com exceção do sinal. Então, qual é a solução de (4), onde 5 5 9x y+ = ? Os métodos convencionais neste caso não fornecem uma resposta.
Também, se
3 1 1A 1 7 2
2 6 1
− = − − −
, observamos que det (A) 0= e o
método de Cramer não pode ser usado! Saberia justificar por quê?
Uma interpretação geométrica do sistema dado corresponde a ter-mos três planos se intersectando. A equação (4) junto com a (3) fazem-nos obter a seguinte resposta:
5 5 92 6 5
x yz x y+ == + −
ou 5 5 92 6 5x yx y z+ =+ − =
(5)
A expressão (5) corresponde a uma reta onde o parâmetro t não aparece explicitamente. Por exemplo, ao considerarmos z t= e uma manipulação algébrica simples no sistema (5), poderemos obter os valores , ,x y z em função do parâmetro t , da seguinte forma:
29 54 47 1 ,20 40
x t
y t t
z t
= −
= + ∈
= +
Essa forma é similar ao que foi trabalhado no Exemplo 1, não é? E lembrando a Figura 2.2.3, estamos numa situação em que temos infinitas soluções!
(1)
(2)
(3)

87
Observe que a resposta do Exemplo 4 foi fornecida com uma caracterização da
solução e graças aos conceitos aprendidos na Geometria Analítica, mas... como podemos re-solvê-lo analiticamente?
Exemplos como o anterior, em que os métodos convencionais ou a regra de Cramer não po-dem ser usados, serão o foco principal para o desenvolvimento dos conceitos nas próximas seções. Uma forma de contornarmos situações como as mostradas acima nos conduzirá ao uso do escalonamento de matrizes. Assim, es-ses sistemas serão caracterizados e as soluções serão facilmente encontradas.
2.2.1 Posto e Nulidade de uma Matriz
Posto de uma Matriz
Definição. Dada uma matriz A de ordem m n× , o posto da ma-triz é dado pela ordem da maior submatriz não singular da ma-triz dada.
Notação: p(A)
Exemplo 5. Encontre o posto da matriz
1 3 5A 0 1 2
0 2 4
= − −
.
Solução. Vejamos as submatrizes que podemos encontrar neste caso.
Se 1n =21[a ] 0= e há outras não nulas.
Se 2n =
Escolhemos 1
3 5A
1 2
= − e 2
0 1A
0 2−
=
dentre outras possíveis.

88
Calculamos os respectivos determinantes,
3 5det 11
1 2
= − ,
0 1det 0
0 2 −
=
Se 3n = , neste caso a única submatriz é a matriz dada com
det(A) 0= .
Assim sendo, e como det(A) 0= , podemos concluir que o posto da matriz A é igual a 2.
Observação. O método não é prático para matrizes de ordem maior, pois nesse caso teremos que calcular determinantes de matrizes de ordem maior que 3 ou 4. Por exemplo, se A é de ordem 7 com determinante nulo, estaremos obrigados a calcular determinantes de matrizes de ordem 5 ou 6! Logo depois de defi-nir a nulidade de uma matriz, apresentaremos uma forma prática de calcular o posto de uma matriz.
Nulidade de uma Matriz
Definição. Dada uma matriz A de ordem m n× , a nulidade da matriz é dada pela diferença entre o número de colunas e o seu posto.
Notação: nul(A)nul(A) pn= −
Exemplo 6. Encontrar a nulidade da matriz dada no Exemplo 5.
Solução. No Exemplo 5 obtivemos que p(A) 2= e, como 3n = , temos:
nul(A) 3 2 1= − =
Observações:
O posto e a nulidade de uma matriz são utilizados na reso-• lução de sistemas lineares.
O posto e a nulidade de uma matriz estão associados à di-• mensão do espaço linha e o espaço coluna da mesma. Esses conceitos serão vistos posteriormente.

89
Ao levar uma matriz na sua forma escada reduzida por linhas, no final do processo, poderemos obter linhas nulas como últimas li-nhas da matriz final. Pois bem, dizemos que são linhas linearmen-te independentes aquelas linhas não nulas da matriz resultante.
Por exemplo, sejam A , B e C três matrizes e A , B e C suas respectivas formas escadas:
0 1 0A
0 0 0
=
,
1 1 0 00 1 1 0
B0 0 0 00 0 0 0
− =
e
1 0 0C 0 1 2
0 0 1
=
,
então, a matriz A só tem uma linha linearmente independente, a matriz B tem duas linhas linearmente independentes e a matriz C três linhas linearmente independentes.
Teorema. Se A é uma matriz de ordem m n× , o posto da matriz é de-terminado pelo número de linhas linearmente independentes da matriz.
Assim, no caso anterior, as matrizes A , B e C têm postos 1, 2 e 3, respectivamente.
Exemplo 7. Use o teorema anterior para encontrar o posto das matrizes A e B :
1 3 5A 0 1 2
0 2 4
= − −
a) ,
4 5
1 2 2 0 11 1 0 1 0
B0 0 1 1 11 5 4 1 2
×
− − − − = − − −
b) .
Solução. a) 1 3 5
A 0 1 20 2 4
= − −
, após escalonamento, obtemos a

90
matriz
1 3 5A 0 1 2
0 0 0
= −
, esta matriz tem as duas primeiras li-
nhas linearmente independentes. Assim, p(A) 2= e, em conse-qüência, nul(A) 1= .
b) Similarmente, no caso da matriz B , após operações elementa-res, chegamos na forma:
1 2 2 0 10 3 2 1 1
B0 0 1 1 10 0 0 0 0
− − − − − =
,
assim,
p(B) 3= e nul(B) 5 3 2= − = .
Agora é sua vez!
Exercício 3. Considerando a matriz B do exemplo 7, use opera-ções elementares para reduzi-la até obter B .
Propriedade. Se A é uma matriz de ordem m n× , então p(A) mín{ , }m n≤ .
Para exibir esse resultado, usaremos como exemplo a matriz B do Exemplo 7, em que 4m = , 5n = , assim, p(B) mín{4,5} 4 p(B) 4≤ = ⇒ ≤ . De fato, p(A) 3= .
Observação. Usando a propriedade, observe que
Se • m n< , então p(A) m≤ .
Se • m n> , então p(A) n≤ .
Deixamos que você pesquise o processo de prova da propriedade.

91
2.2.2 Matrizes Equivalentes e Sistemas Equivalentes
Matrizes Equivalentes
Definição. Duas matrizes A e A são ditas matrizes equivalentes se uma delas é obtida ao fazermos operações elementares na outra.
Assim, se operaçõeselementaresA A→ , dizemos que as matrizes A e A são
equivalentes. Por exemplo, se
1 2 3A 0 0 1
1 2 0
=
, 1 2 3
A 0 0 10 0 0
=
e
3 24 6B
15 2 9
= − − ,
1 8 2B
0 118 39
=
,
então, as duplas de matrizes A , A e B , B são equivalentes, pois A e B foram obtidas após um processo de operações elementares.
Agora é sua vez!
Exercício 4. Quais operações elementares foram realizadas nas ma-trizes A e B para obtermos as matrizes A e B , anteriormente?
Propriedade. Matrizes equivalentes possuem o mesmo posto.
Um modo de exemplificar esta última propriedade é observar-mos que uma matriz elementar, E , é sempre equivalente à matriz identidade, I . Saberia dizer por quê? Sabendo-se que a matriz identidade possui n linhas linearmente independentes, então o seu posto será igual a n , p(I) n= , assim, p(E) n= .
Matriz Aumentada ou Ampliada
Dado o sistema (SLm), AX B= , a matriz aumentada ou ampliada do sistema, denotada por uA , é dada ao acrescentarmos na matriz de coeficientes, A , a matriz dos termos independentes, B .
Notação: uA [A B]= .

92
uA é uma matriz de ordem ( 1)m n× + , onde as n primeiras colu-nas são dadas pela matriz A e a última coluna é a matriz coluna dada por B . Por exemplo, a matriz aumentada do sistema
3 5 12 7 2
2 3
x y zx y z
y z
+ + =+ + =
+ =
é dada por:
u
1 3 5 1A 1 2 7 2
0 2 1 3
=
.
Ao fazermos operações elementares na matriz uA , estaremos mudando simultaneamente os elementos de B , ou seja, obtemos uma matriz uA [A B]=
. Com isso, podemos dizer que o sistema inicial foi mudado para um sistema da forma:
AX B= .
Sistemas Equivalentes
Dois sistemas, AX B= e AX B= , são ditos equivalentes se as matrizes aumentadas dos mesmos, uA [A B]= e uA [A B]=
, são matrizes equivalentes.
Exemplo 8. Encontre as matrizes aumentadas dos sistemas linea-res (SLg1) e (SLg2) dados abaixo e verifique se eles são equivalentes.
3 5 12 7 2
2 3
x y zx y z
y z
+ + =+ + =
+ = (SLg1) e
3 5 12 1
1
x y zy z
z
+ + =− + =
= (SLg2)
Solução. As matrizes aumentadas dos sistemas (SLg1) e (SLg2) são, respectivamente, dados por:
u1
1 3 5 1A 1 2 7 2
0 2 1 3
=
e u2
1 3 5 1A 0 1 2 1
0 0 1 1
= −
.
Veja que, fazendo as duas operações elementares, 2 1 2l l l←− + e
3
5l sobre a matriz u1A , obtém-se facilmente a matriz u2A , isto é,
operações1 2elementaresA Au u→ . Assim, u1A
e u2A são matrizes equivalentes.
93
Propriedade. Sistemas equivalentes possuem a mesma solução.
Assim, se a forma reduzida da matriz aumentada for mais sim-ples que a inicial (por exemplo, ter mudado para a forma triangu-lar ou diagonal), a propriedade dada diz que, ao resolvermos um sistema linear, é suficiente resolver o seu sistema equivalente.
Considerando os sistemas fornecidos no Exemplo 8 e usando sis-temas convencionais, podemos verificar facilmente que a solu-ção de ambos os sistemas é dada por 7x = − , 1y = , 1z = . Isto é,
711
X− =
, e pedimos que verifique o resultado!
Com o conteúdo teórico dado nas seções já apresentadas, estamos prontos para apresentar o método de solução usando escalona-mento. Para isto, precisamos caracterizar os sistemas lineares!
2.2.3 Caracterização dos Sistemas Lineares
Um sistema linear pode ser:
Possívela) (compatível, consistente), se possui solução.
Determinado:• quando a solução é única;
Indeterminado:• quando há infinitas soluções.
Impossívelb) (incompatível, inconsistente), se não possui so-lução.
Seja o sistema linear de m equações com n incógnitas da forma:
AX B=
Usando o conceito de posto de matrizes no caso da matriz A , p(A) , e da matriz aumentada uA , up(A ) , podemos caracterizar as soluções do sistema linear da seguinte forma:
O sistema é possível se a) up(A) p(A )= .Se p p(A)= , então o sistema é
Determinado, se • p n= .
Indeterminado, se • p n< .

94
O sistema é impossível se b) up(A) p(A )≠ .
Exemplo 9. Caracterizar cada sistema dado.
a) 12
x yx y
− + =− + =
b) 11
x yx y
− + =+ = −
Solução. a) Considerando 2m = e 2n = , o sistema pode ser co-locado na seguinte forma matricial:
A X B1 1 11 1 2
xy
=
− ⋅ = −
[ ] 2 2 1u u
1 1 1 1 1 1A A B A
1 1 2 0 0 3l l l←− +− −
= = → = −
e pela propriedade do posto de matrizes equivalentes, temos que p(A) 1= e up(A ) 2= . Como up(A ) p(A)≠ , então, o sis-tema é impossível.
b) Com 2m = e 2n = , o sistema AX B= é da forma:
1 1 11 1 1
xy
− ⋅ = −
[ ] . .u u
1 1 1 1 1 1A A B A
1 1 1 0 2 0op elem− −
= = → = −
.
Assim, p(A) 2= e up(A ) 2= , por serem iguais ( p 2= ), o sis-tema é possível. Como 2 pn = = , teremos então um sistema possível e determinado.
O sistema equivalente ao sistema dado é:
12 0
x yy
− + ==
,
assim, 1
0xy= −=
.
Portanto,1
X0
xy
− = =
é a solução do sistema dado.
95
Agora é sua vez!
Exercício 5. Com auxílio do conteúdo fornecido na seção 2.1, pede-se a interpretação geométrica dos sistemas dados no Exemplo 9.
Graus de Liberdade de um Sistema Linear
Quando um sistema linear é caracterizado como indeterminado, usa-se o conceito de graus de liberdade. O mesmo será denotado com g .
Assim, se um sistema de m equações com n incógnitas da forma AX B= é indeterminado, e se o posto da matriz de coeficientes é p , então up(A) p(A ) p n= = < , e assim, p 0n − > .
Os graus de liberdade do sistema serão definidos pelo valor dado por g pn= − .
Observações:
Os graus de liberdade do sistema são sempre um valor po-• sitivo.
O valor de g será associado ao número de variáveis livres • do sistema.
Exemplo 10. Dado o sistema
1x y− + = ,
encontre os graus de liberdade, indique as variáveis livres e en-contre a solução.
Solução. A representação matricial do sistema é
[ 1 1] [1]xy
− =
Neste caso, 1m = , 2n = e up(A) p(A ) 1= = Você saberia dizer por quê?
O sistema é possível e indeterminado; assim, g 2 1 1= − = . Dessa maneira, haverá uma variável livre. Essa variável pode ser escolhida como sendo qualquer uma das incógnitas do sistema x ou y . Sem perda de generalidade, escolheremos a segunda, y .

96
Quais são as soluções do sistema? Como o sistema possui infinitas soluções, consideramos y r= ∈ . Encontraremos todas as solu-ções por substituição direta:
1 1x y ry r= − + = − +=
Representando matricialmente:
1 1 1X ,
0 1x r
r ry r
− + − = = = + ∈
.
Assim, o conjunto de soluções do sistema dado é:
2 1 1/ ,
0 1x x
r ry y
− ∈ = + ∈
.
Observação. Fazendo 0r = ou 2r = , no sistema dado no Exem-plo 10, teremos, respectivamente:
1
1X
0−
=
ou 2
1X
2
=
.
Assim, 1X e 2X são ditas serem duas soluções particulares do sistema dado.
Exercício Resolvido1) Dado o sistema:
1 2 4
1 3 4
2 3 4
1 2 4
1 2 3 4
02
32 1
2 3
x x xx x xx x x
x x xx x x x
+ − =− + =+ − = −
+ − =+ − − =
Encontre:
A forma matricial do sistema.a)
O posto e a nulidade da matriz de coeficientes.b)
Os graus de liberdade do sistema.c)
A caracterização do sistema.d)
Calcular a solução (se existir).e)

97
Solução.
a) Considerando 5m = e 4n = , o sistema na forma AX B= é dado por:
1
2
3
4
1 1 0 1 01 0 1 1 20 1 1 1 31 1 0 2 12 1 1 1 3
xxxx
− − ⋅ =− − − − −
b) Escalonando Au = [A B]
1 1 0 1 00 1 1 2 20 0 0 1 10 0 0 1 10 0 0 1 1
− − − − − −
4 3 4
5 4 52
l l ll l l
l
← +←− +−
→
1 1 0 1 00 1 1 2 20 0 0 1 10 0 0 0 00 0 0 0 0
− − − −
,
assim, p p(A) 3= = e nul(A) 1= .
c) g(A) p 4 3 1n= − = − = .
d) Como up(A) p(A ) 3 4= = < , então o sistema é indeterminado e possui 1 variável livre.
e) O sistema equivalente é
1 2 4
2 3 4
4
02 2
1
x x xx x x
x
+ − =+ − = −
= −
considerando 3x como sendo a variável livre, isto é, 3x r= ∈ , temos:

98
4
3
1xx r= −=
⇒ 2
1 2 4
2 2( 1) 43
x r rx x x r= − + − = − −= − + = +
.
Assim, a solução X é igual a:
34
X ,
1
rr
rr
+ − − = ∈ −
,
as infinitas soluções, isto é, o conjunto solução, S , pode ser colocado na seguinte forma:
3 3 14 4 1
X , ,0 1
1 1 0
rr
S r r rr
+ − − − − = = ∈ = + ∈ −
.
A solução do exercício anterior nos fornece o método comumente conhecido como o método de Gauss .
2.2.4 Método de Gauss para Solução de Sistemas Lineares
Ao resolvermos os sistemas no Exemplo 10 e o exercício posterior a ele, optamos por escolher uma variável livre (ou várias, se fosse o caso) e, por substituição a partir dela (ou delas), encontramos as outras, usando o sistema equivalente. Este método é conhecido como o método de Gauss para sistemas lineares.
Observemos com detalhes o que foi feito no último exercício. Após o escalonamento, chegamos ao seguinte sistema equivalen-te, onde a quarta incógnita, 4x , ficou dada em forma explícita.
1 2 4
2 3 4
4
0 (1)2 2 (2)
1 (3)
x x xx x x
x
+ − =+ − = −
= −
Com a equação (3) , resolvemos 1x e 2x , e considerando a variável
livre: 3 (4)x r= ∈ (4)
(1)(2)(3)

99
Assim, substituindo (3) e (4) em (1) e (2), conseguimos o seguinte resultado:
2
1
4 (5)3 (6)
x rx r= − −= +
.
Considerando que 1 2 3 4[ ]tX x x x x= e os resultados dados em (6), (5), (4) e (3), temos a solução geral:
1
2
3
4
34
X ,
1
x rx r
rx rx
+ − − = = ∈ −
.
Agora é sua vez!
Exercício 6. Duas soluções do sistema no exercício resolvido são
1
45
X11
− = −
e 2
56
X21
− = −
. Para quais valores de r isto acontece?
Observação. É possível escolher qualquer uma das incógnitas como variável livre.
No exercício resolvido, nada impede escolhermos 1x ou 2x como variáveis livres. Vejamos,
se a variável livre é escolhida como 1x s= ∈ , teremos
Em (1)2 4 1
2
11
x x xx s= − = −= − −
Em (1)3 2 4
3
3
2 21 2( 1) 2
3
x x xx sx s
= − + −= + + − −= − +
Assim, obtemos a seguinte solução geral:
1
2
3
4
1X ,
31
x sx s
sx sx
− − = = ∈ − + −
(5)(6)

100
O conjunto solução, neste caso, é:
0 11 1
,3 11 0
S s s
− − = + ∈ − −
.
Considerando 4s = , obtemos a seguinte solução particular
1
45
X11
− = −
, que coincide com aquela obtida anteriormente.
Agora é sua vez!
Exercício 7. Qual é o valor de s para encontrarmos a outra solu-ção, 2X , do exercício 6?
Soluções como Combinação Linear de Vetores
Agora suponha que um dado sistema AX B= , onde 4n = e p 2= , tenha duas variáveis livres ( g 2= ) e que a solução geral fique ex-plicitada como sendo, por exemplo:
1 1 01 1 1
X , ,0 0 21 0 0
r s r s
− − = + + ∈ −
.
A solução deste exemplo hipotético é colocada como a soma de uma solução particular não nula e uma combinação linear de dois vetores. Isso indica que, em geral, podemos expressar a solução de um sistema linear indeterminado qualquer como uma soma de uma solução particular e uma combinação linear de vetores igual ao número de variáveis livres. Ou seja, toda vez que o sistema for indeterminado, a solução geral pode ser caracterizada por:
1 1 2 2X X X X Xp g gt t t= + + + +
onde as soluções X1 , X2 , ... , Xg serão denominadas soluções bási-cas e Xp é a solução particular.

101
Exemplificaremos este resultado nos dois exercícios seguintes, sendo que o primeiro será resolvido com detalhes.
Exercícios Resolvidos
2) Verifique que o seguinte sistema é indeterminado e que a so-lução pode ser colocada como a soma de uma solução particular e uma combinação linear de soluções básicas,
2 3 4
1 2 3 4
1 2 3 4
1 2 3 4
1 2 3
10 4 14 2
3 2 2 2 52 8 2 2 4
6 3 1
x x xx x x x
x x x xx x x x
x x x
− + =+ − + =
+ + + =− − + − = −
− + =
Solução. Considerando 5m = e 4n = , expressamos o sistema na seguinte forma matricial:
0 10 4 1 11 4 1 1 2
X3 2 1 2 52 8 2 2 4
1 6 3 0 1
− − = − − − − −
.
Usando o método de Gauss,

102
Como p p(A) p(A ) 2 4u= = = < , então o sistema é indeterminado. Os graus de liberdade do sistema são g 2= . Assim sendo, haverá duas variáveis livres.
O sistema equivalente é dado por:
1 2 3 4
2 3 4
4 2 (1)2 1 1 (2)5 10 10
x x x x
x x x
+ − + =
− + =
sejam 3x e 4x as variáveis livres, isto é,
3x s= , 4x r= com , (3)s r∈ (3)
Substituindo (3) em (2), obtemos:
21 2 1 (4)
10 5 10x s r= + − (4)
Similarmente, substituindo (3) e (4) em (1):
(5)
A solução geral é:
8 3 35 5 51 2 1
X , ,10 5 100 1 00 0 1
s r s r
− −
− = + + ∈
(1)
(2)
Dessa forma, a solução geral é apresentada como a soma de uma solução particular,
851
1000
, e uma combinação linear dos vetores (matrizes) coluna
352510
−
e
351
1001
− −
.

103
3) Verifique que o sistema dado abaixo é indeterminado e en-contre a solução geral.
1 2 3
1 2 3
1 2 3
4 6 12 8 12 2
2 3 0
x x xx x x
x x x
+ − =− − + = −
− + =
Solução. O sistema possui 3m = equações e 3n = incógnitas e a representação matricial dele é dado por:
1 4 6 12 8 12 X 2
2 3 1 0
− − − = − −
Após escalonamento (usando o método de Gauss), obtemos que g 1= , e considerando 3x como variável livre, encontramos a se-guinte solução geral:
3 1411 11
X ,2 1311 110 1
t t
= + ∈
.
2.2.5 Sistemas Homogêneos
Quando B 0= no sistema dado por AX B= , o sistema é dito ser homogêneo. Isto é, um sistema homogêneo é um sistema linear da forma:
AX O= , (SLh)
onde SLh indica ser um Sistema Linear homogêneo.
Observe que, neste caso, o posto da matriz é igual ao posto da matriz aumentada, uma vez que a última coluna da matriz au-mentada é nula e permanecerá inalterada após as operações ele-mentares. Dessa forma, o sistema é sempre possível!
Consideremos que A possua n linhas, então, se o sistema for de-terminado ( p n= ), haverá n linhas linearmente independentes e obteremos a solução nula, conhecida como solução trivial. Você pode verificar, ao fazer substituição direta, após o escalonamento,

104
que X O= . Já no caso do sistema ser indeterminado, haverá pelo menos uma solução básica diferente da trivial a partir da qual (ou das quais) todas as outras soluções são geradas.
Observação: Observe que, pelo desenvolvido na seção anterior, a solução particular neste caso será sempre nula.
Vejamos os seguintes exemplos.
Exemplo 11. Encontre a solução do seguinte sistema homogêneo:
1 2 3
1 2
1 2 3
2 03 0
0
x x xx x
x x x
+ − =+ =
− − =
Solução. Após escalonamento, temos o seguinte sistema equiva-lente:
1 2 3
2 3
2
2 000
x x xx x
x
+ − =+ =
=
sendo que 3n = e p 3= , então, o sistema é determinado. Assim, a solução é a solução trivial. Confirmamos isso resolvendo por subs-tituição direta a partir da última equação, conseguindo
0X 0
0
=
.
Você pode facilmente verificar esse resultado.
Exemplo 12. Encontre a soluções básicas do sistema homogêneo dado por:
1 4 62 8 12 X O
2 3 1
− − − = −
.
Solução. Você pode observar que o sistema dado corresponde à parte homogênea do sistema dado no último exercício resolvido. Nesse exercício, obtivemos um sistema indeterminado com um grau de liberdade, isto é, o sistema homogêneo possui uma solução básica da forma:
Poderia justificar por quê?

105
1
141113111
X
=
.
Podemos expressar a solução geral na forma:
1
1411
X X ,13111
t t t
= = ∈
.
Propriedades
Dado o sistema linear AX B= com parte homogênea AX O= . Listamos a seguir as seguintes propriedades.
Propriedade 1. A solução de um sistema linear é a soma da so-lução da parte homogênea, hX , com uma solução particular, X p , do sistema não-homogêneo.
Prova. Por hipótese, hX é solução do sistema homogêneo, isto é, AX Oh = e X p é uma solução particular do sistema não-homo-gêneo, ou seja, AX Bp = .
Vejamos se X Xp h+ é solução do sistema linear:
A(X X ) AX AXp h p h+ = + .
sendo que
AX Oh = e AX Bp = ,
então, (X X ) O B
Bp hA + = +
=.
Daí que X p hX+ é solução do sistema linear.
Exemplo 13. Verifique a propriedade com o sistema:
1 2 3
1 2
1 2 3
x + 2x - x = 1 x + 3x = 0 x - x - x = 0
106
Solução. A forma matricial do sistema dado é:
( )
1
2
3
1 2 1 10 1 1 0
10 1 0 0
A X B
xxx
− =
(1)
O respectivo sistema homogêneo é
AX O (2)= (2)
cujo sistema foi fornecido no Exemplo 11.
Ao resolvermos (2), obtivemos:
1 2 3
00 X 0
0hx x x
= = = ⇒ =
.
Ao resolvermos (2), temos1
X 00
p
=
.
Assim,
1
1X X X 0
0p
= + =
e a propriedade fica satisfeita.
Agora é sua vez!
Exercício 8. Anteriormente, resolvemos o sistema AX B= da for-ma:
1
2
3
4
0 10 4 1 11 4 1 1 2
(1)3 2 1 2 52 8 2 2 4
1 6 3 0 1
xxxx
− − = − − − −
(1)
Com solução geral:

107
8 3 35 5 51 2 1
X , ,10 5 100 1 00 0 1
s t s t
− −
− = + + ∈
,
A solução do sistema homogêneo respectivo, AX B= , é da forma:
3 35 52 1
X , , (2)5 101 00 1
h s t s t
− −
− = + ∈
(2)
Obtenha:a)
i) X p para 1t s= = .
ii) Xh para 2t = e 1s = − .
Verifique a Propriedade 1 usando as soluções obtidas nos b) itens (i) e (ii). Nota: utilize o mesmo conjunto de parâmetros.
Propriedade 2. Dado um sistema homogêneo com solução dife-rente da trivial:
Se a) X e Y são soluções, então X Y+ também é solução.
Se b) X é solução, então X também é solução, para qual-quer escalar real.
Prova. Deixamos a você a demonstração da Propriedade 2 como exercício.
Observação. A Propriedade 2 também pode ser formulada na se-guinte forma:
Se X e Y são soluções do sistema AX O= , então, X Y + também é uma solução do sistema.

108
No ambiente virtual, disponibilizaremos algumas atividades computacionais em
forma de protótipos, que foram desenvolvidas por alunos do curso de Licenciatura em Mate-mática da UFSC como aplicação do Trabalho de Conclusão de Curso e em atividades de exten-são. Com elas, você poderá praticar a resolução de sistemas lineares e problemas com siste-mas lineares de situações vindas do cotidiano. Quem sabe não seja o caso de alguns de vocês adotarem o gosto ao trabalhar com o compu-tador e possam, no futuro, produzir atividades usando matemática que depois sejam úteis no seu trabalho como professor. O que você acha?
2.3 Decomposição LUAlgumas vezes, é muito útil fatorar um número natural em um produto de outros números naturais (por exemplo, 6 2 3= ⋅ , 45 3 3 5= ⋅ ⋅ , etc). Dessa mesma forma, pode ser muito útil fatorar ou decompor uma matriz como o produto de duas ou mais matri-zes. Um exemplo disto é o seguinte:
3 1 1 0 3 19 5 3 1 0 2
− − = − −
O que você observa? Há alguma característica especial em cada uma das matrizes da fatoração dada?
A decomposição de matrizes é geralmente usada na resolução de sistemas de equações lineares pelo método da eliminação de Gauss e particularmente adequada para implementação em com-putadores.
O leitor deve saber que existem outros ti-pos de fatoração de matrizes igualmente
úteis. Na verdade, esses tópicos são muito ricos e existem livros inteiros, cursos e sítios na in-ternet que se dedicam à fatoração de matrizes!

109
Embora a utilidade desses conteúdos fuja do escopo deste texto, no nosso ambiente virtual você encontrará alguns desses materiais para sua informação.
Vejamos como podemos realizar tal fatoração, seja qual for a or-dem da matriz. Para tal, considere um sistema de equações linea-res da forma AX B= , em que A é uma matriz de ordem n .
Exemplo 14. Seja A uma matriz de ordem 3n = da forma:
2 1 3A 4 1 3
2 5 5
= − −
,
escalone-a até obter uma matriz triangular superior.
Solução. O escalonamento pedido pode seguir o seguinte pro-cesso:
2 1 3 2 1 3 2 1 3A 4 1 3 0 3 3 0 3 3 U
2 5 5 0 6 8 0 0 2
= − → − − → − − = −
.
Lembra, no capítulo anterior, do desenvolvimento realizado para calcularmos a matriz inversa? Pois bem, desta vez, um procedi-mento similar servirá para decompormos uma matriz qualquer.
Seguindo com o exemplo dado acima, podemos observar que na decomposição houve a participação de três matrizes elementares
1 2 3E ,E ,E e que
3 2 1E E E A U= .
O leitor pode verificar que essas matrizes elementares são da-das por:
1 2 3
1 0 0 1 0 0 1 0 0E 2 1 0 , E 1 1 0 , E 0 1 0
0 0 1 0 0 1 0 2 1
= − = =
.

110
Agora é sua vez!
Exercício 9. a) Verifique que o produto 3 2 1E E E A U= .
b) Considere 13 2 1L E E E− = , verifique matricialmente que
A LU= , também encontre L - a mesma será uma matriz triangular inferior com elementos diagonais iguais a 1.
Você observará que o método está sendo introduzido numa for-ma muito prática, ao estudar o Exemplo 14 e resolver o Exercício 9. Pois bem, essa prática fornecerá a metodologia para calcular a decomposição de uma matriz quadrada qualquer.
Suponha que A é uma matriz de ordem n que permite ser escalo-nada sem precisar da permutação das suas linhas:
operaçõeselementaresA U→
isto é, existem matrizes elementares 1 2E ,E , ,Ek tais que:
2 1E E E A Uk = .
Como visto anteriormente, cada matriz Ei é não-singular; as-sim, o produto 2 1E E Ek é também não-singular, isto é, existe
12 1(E E E )k
− , tais que
12 1A (E E E ) Uk
−= .
A matriz 12 1L (E E E )k
−= é uma matriz triangular inferior com elementos diagonais iguais a um (poderia dizer por quê?).
Dessa forma, obtemos a decomposição da matriz A como o pro-duto de uma matriz triangular inferior L por uma matriz trian-gular superior U , isto é,
A = LU.
É importante ressaltar que o procedimento mostrado anterior-mente foi desenvolvido sem a permutação das linhas da matriz. Em geral, ao escalonarmos uma matriz, poderemos precisar des-se tipo de operação elementar. Nesse caso, você pode recorrer à leitura das referências dadas pelos livros de Leon ou Poole.
Mais detalhes da metodologia, assim como um código computacional da mesma, podem ser encontrados no ambiente de aprendizagem da nossa disciplina.
Visite o ambiente da nossa disciplina e encontre mais informação!

111
A decomposição LU serve para calcular a matriz inversa, o deter-minante de uma matriz e para resolver sistemas lineares. É neste último ponto, a resolução de sistemas lineares, que enfocaremos a praticidade deste método no conteúdo desta seção.
Dado o sistema linearAX B= ,
em que foi calculado
A LU=
encontraremos X ao inserirmos uma nova variável vetorial Y que resolva o sistema
LY B= ,
Assim, ao termos encontrado Y , resolvemos
UX Y= .
Nas duas situações, você pode reparar que foram resolvidos dois sistemas numa forma recursiva. Vejamos isso com o seguinte exemplo.
Exemplo 15. Resolver o sistema AX B= usando decomposição LU de matrizes. Use a matriz A como sendo a do Exemplo 14 e
2B 0
5
= −
.
Solução. Com o método acima descrito e sabendo que
A LU= ,isto é :
1 0 0 2 1 30 1 0 0 3 32 2 1 0 0 2
A = − − −
,
temos LY B= ou
1 0 0 20 1 0 Y 02 2 1 5
= − −
, onde 1
2
3
Yyyy
=
.

112
Assim,
1
2
3 2 1
2 20 Y 0
95 2 2 9
yyy y y
= = ⇒ = −= − + − = −
Agora, resolvendo UX Y= ,
2 1 3 20 3 3 X 00 0 2 9
− − = −
,
3 3
2 3 2
1 2 3 1
92 9 1029 93 0 3 X
2 22 2 3 20 10 9
2
x x
x x x
x x x x
−= − ⇒ =
− − − = + ⇒ = ⇒ = = − − = ⇒ = −
A solução do sistema é dada pelo vetor .
Pratique agora!
Exercício 10. Verifique a respostas do Exemplo 15 usando outro método.
Exercício 11. Aplique a decomposição LU para resolver os siste-mas da forma AX B= dados abaixo.
2 1A
2 5−
=
a) , 5
B1
=
.
0 0 1 21 1 3 2
A0 2 1 11 1 1 0
− = −
b) ,
11
B01
= −
.
Nota. Um dos itens do Exercício 10 vai precisar da investigação do aluno de um método aqui não apresentado. Deixamos como um desafio a ser resolvido por você.

113
Observações:
O método é muito útil para resolver sistemas de ordem 1) 4n ≥ , em que será necessário fazer muitos cálculos.
Uma forma de reduzir os cálculos na mão é se fazer uso 2) de um Sistema Algébrico Computacional, conhecido na li-teratura como CAS (Computational Algebric System). Os softwares não-livres e livres mais comuns são Matlab (ou Matrix Laboratory), Maple, Mathematica, Scilab, Octave, etc.
Exercícios Propostos
1) Obtenha a solução geral de cada um dos sistemas dados abai-xo e explicite as soluções básicas se o sistema for homogêneo.
a) 2 x + y - 2 z + 3 w = 1 3 x + 2 y- z +2 w = 43 x + 3 y + 3 z - 3 w = 5
c) 1 2 3 4
1 2 3 4
1 2 3 4
x -2 x +3 x - 2x = 03 x - 7 x -2 x + 4x = 04 x +3 x + 5 x +2 x =0
b) x + 2 y - 3 z = -1 3 x -y +2 z = 75 x + 3 y -4 z = 2
d) x + 2 y - 3 z = 02 x + 5 y +2 z = 0 3 x - y - 4 z = 0
2) Dado o sistemax + y - z = 12 x + 3 y +a z = 3x + a y +3 z = 2
Determine os valores de “a” para termos um sistema incompatí-vel ou compatível (determinado ou indeterminado).
3) Se possível, faça a decomposição LU de cada uma das ma-trizes de coeficientes dos sistemas dados em A) e B). Resolva os sistemas usando o método de decomposição LU para sistemas li-neares.
Sugerimos acessar o ambiente da nossa
disciplina, onde poderá encontrar mais
informações.

114
Resumo
Neste capítulo, fornecemos as ferramentas fundamentais para re-solver sistemas lineares de tipo retangular, isto é, aqueles em que a matriz de coeficientes tem um número de linhas não necessaria-mente igual ao número de colunas. Fornecemos os conceitos que podem ser aplicados em sistemas de ordem maior ou igual a quatro, onde os métodos convencionais ficam difíceis de serem aplicados.
Os conceitos foram fornecidos acompanhados de exemplos e exer-cícios resolvidos e propostos. Para entendimento do conteúdo, é necessária a prática da solução dos exercícios e a persistência nos detalhes da teoria fornecida no capítulo anterior e neste próprio. Mais adiante, o aluno poderá perceber o quanto do aprendido será resgatado no capítulo que segue. Esperamos que você tenha tido um bom divertimento ao navegar neste capítulo, empolgan-do-se na metodologia utilizada!
Bibliografia Comentada
SANTOS, Reginaldo. Um curso de geometria analítica e álgebra linear. Belo Horizonte: Ed. UFMG, 2001.
Esta referência é muito útil para aplicar os conceitos usando alguns recursos computacionais. Usaremos esta referência no nosso trabalho no ambiente virtual.
BOLDRINI, José et. al. Álgebra linear. 3. ed. São Paulo: Harbra, 1980.
Com este livro, você pode pesquisar e ou aprofundar alguns dos conteúdos aqui fornecidos.
RORRES, Anton. Álgebra linear com aplicações. 8. ed. Porto Alegre: Bookman, 2001.
Neste livro, você pode encontrar uma gama de exercícios para acrescentar a sua prática.
115
POOLE, David. Álgebra linear. São Paulo: Pioneira Thomson Learning, 2004.
Nesta referência, você encontrará exercícios da última seção deste capítulo e aplicações muito interessantes dos capítulos aqui apresentados. Comentamos, por exemplo, o uso do código de barras, que é uma dessas aplicações no nosso cotidiano encontradas nesse livro. Fica então, a modo de convite, fazer uma leitura a respeito.

3 Espaços Vetoriais

119
3 Espaços Vetoriais
A estrutura de espaço vetorial, que será tratada neste capítu-lo, é o conceito básico da Álgebra Linear. Um espaço vetorial não é outra coisa que um conjunto de vetores que satisfazem um conjunto de regras (axiomas). Este conceito proporciona unidade e precisão aos assuntos essenciais da Matemáti-ca. Após introduzir o sistema axiomático e as proprieda-des fundamentais, estaremos em condições de entender as idéias mais importantes que se derivam deste conceito.
3.1 Introdução
3.1.1 Definição
Seja V um conjunto não vazio, K um corpo ‘+ ’ e ‘∗ ’, duas ope-rações que chamaremos soma e produto por escalar, respectiva-mente. Dizemos que o objeto ( ,K, ' ', ' ')V + ∗ é um espaço vetorial (EV) (ou que V é um espaço vetorial sobre o corpo K ) se, e somente se, verificam-se os seguintes axiomas:
EV1) A soma é uma composição interna em V , isto é, se ,u v V∈ , então u v V+ ∈ .
EV2) A multiplicação de u V∈ por um escalar é uma composi-ção externa em V , isto é, se é um escalar em K e u V∈ , então u V ∈ .
EV3) ...
A esta lista segue uma série de propriedades que completam a definição de espaço vetorial, que omitiremos por enquanto (não se preocupem, elas serão relacionadas depois).
Isto é o que você pode esperar, em geral, quando se procura por uma definição de espaço vetorial nos textos de Álgebra Linear.
Em álgebra abstrata, um corpo é uma estrutura
algébrica na qual estão definidas as operações de adição e multiplicação, que cumprem com as pro-priedades associativa, co-mutativa e distributiva.
O matemático Hermann Grassmann (1809-1877) é
geralmente creditado como o primeiro a introduzir a idéia de EV, em 1844. Porém, uma pessoa que realmente o estudou foi
o matemático italiano Giuseppe Peano (1852-1932), que em seu livro
Cálculo Geométrico, tornou claro o trabalho anterior
de Grassmann e descreveu as propriedades para um
EV da maneira como hoje o conhecemos. O livro de
Peano é também digno de nota por introduzir
operações em conjuntos, cujas anotações são: ,
e (que ainda usamos).
120
Para o leitor, que está começando com AL, esta definição pode ser formal demais para introduzir a idéia de EV. Em algum momen-to, deverá valorizar o rigor matemático da forma como a definição está sendo colocada acima, e gradativamente adotá-lo.
Agora, tomaremos um caminho alternativo para entender este conceito com maior facilidade. Valer-nos-emos, para isso, de exemplos de conjuntos (que são espaços vetoriais) com os quais você já tem alguma familiaridade.
Exemplos. Consideremos os seguintes conjuntos: o conjunto de ve-tores no plano 2
, o conjunto formado pelas funções :f → , denotado por ( )F , e o conjunto das matrizes quadradas de or-dem m com coeficientes reais, que denotaremos por Mm m× .
3.1.2 Vetores no Plano
Vetores não-nulos no plano podem ser representados geometri-camente por segmentos orientados. Essa representação geomé-trica nos ajudará a visualizar como as operações de multiplicação de um vetor por um escalar e de soma de vetores funcionam em
2 . Consideremos um ponto 1 2( , )x x no plano, que não esteja si-tuado na origem. É possível associar-lhe um segmento orientado com origem em (0,0) e extremo em 1 2( , )x x , que representamos como sendo o vetor 2x y+ ∈ , onde 1x e 2x são as respectivas componentes.
Vamos agora ao que nos interessa. Consideremos dois vetores x
e y , e um escalar ∈ . Para cada vetor 1
2
xxx
=
e para cada es-calar , o produto x é definido por:
1
2
xxx
=
,
que é um outro vetor que possui a mesma direção que x e que pode ter o sentido e comprimento mudado dependendo do va-lor de .
Por outro lado, a soma de dois vetores x e y é definida como:
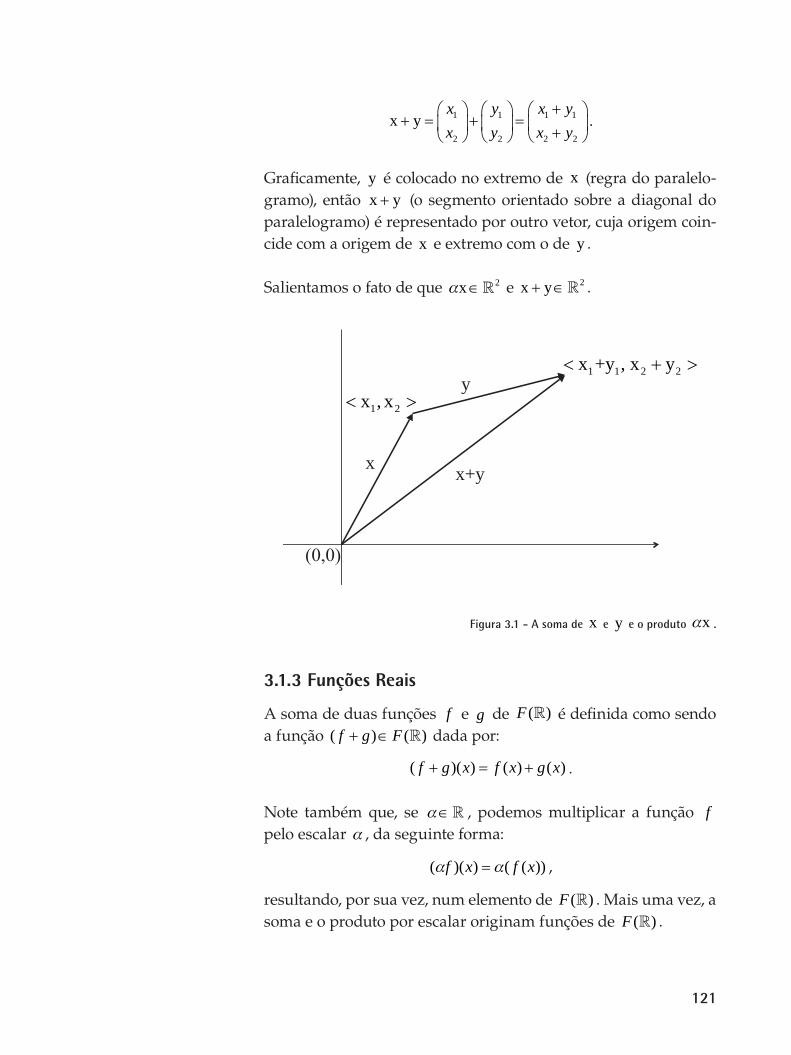
121
1 1 1 1
2 2 2 2
x yx y x yx y x y
+ + = + = +
.
Graficamente, y é colocado no extremo de x (regra do paralelo-gramo), então x y+ (o segmento orientado sobre a diagonal do paralelogramo) é representado por outro vetor, cuja origem coin-cide com a origem de x e extremo com o de y .
Salientamos o fato de que 2x ∈ e 2x y+ ∈ .
1 2x , x< >
1 1 2 2x +y , x y< + >y
x x+y
Figura 3.1 - A soma de x e y e o produto x .
3.1.3 Funções Reais
A soma de duas funções f e g de ( )F é definida como sendo a função ( ) ( )f g F+ ∈ dada por:
( )( ) ( ) ( )f g x f x g x+ = + .
Note também que, se ∈ , podemos multiplicar a função f pelo escalar , da seguinte forma:
( )( ) ( ( ))f x f x = ,
resultando, por sua vez, num elemento de ( )F . Mais uma vez, a soma e o produto por escalar originam funções de ( )F .

122
,
,
Figura 3.2 - A soma de funções e o produto por escalar.
3.1.4 Matrizes
Podemos somar duas matrizes quadradas de ordem n ( Mn n× ) (as quais denotamos como A ( )ij n na ×= e B ( )ij n nb ×= ), colocando A B ( )ij ij n na b ×+ = + , que é também uma matriz de Mn n× .
Com relação à multiplicação de A ( )ij n na ×= por um escalar ∈ , é natural definirmos A ( )ij n na ×= , que também pertence a Mn n× .
Você saberia dizer o que estes conjuntos citados anteriormente, com as operações de adição entre seus próprios elementos, por um lado, e a multiplicação de seus elementos por escalares, têm em comum?
Em todos os casos, a soma de um par de elementos do conjunto e/ou a multiplicação de qualquer elemento por um escalar resulta em outro ele-mento do mesmo conjunto.

123
Vejamos se conseguimos encontrar outras propriedades em co-mum que poderiam ser aplicadas a esses conjuntos.
Lembrando do estudado na disciplina Geometria Analítica, não será difícil entender o significado das seguintes igualdades, (aqui
, ∈ e x, y, z são vetores no plano).
x y y x+ = +1) ;
x (y z) (x y) z+ + = + +2) ;
se 3) 0 representa o vetor nulo, então 0 0x + = ;
o vetor 4) x− ( o oposto de x ) é tal que x ( x) 0+ − = ;
( x) ( )x =5) ;
( )x x x + = +6) ;
(x y) x y + = +7) ;
1 x x⋅ =8) .
Sugestão. Reproduza estes itens fazendo um esboço dos vetores resultan-tes em ambos os lados das igualdades e formule as propriedades algébri-cas correspondentes.
Verifica-se facilmente, a partir das propriedades dos números re-ais, que, com relação a quaisquer funções f , g e h em ( )F e para todo , ∈ , são válidos os seguintes resultados:
f g g f+ = +1) ;
( ) ( )f g h f g h+ + = + +2) ;
se 3) 0 representa a função nula, isto é, 0( ) 0x = para todo x , então 0 0f+ = ;
a função 4) f− definida por ( ( )) ( )f x f x− = − para todo x∈ é tal que ( ) 0f f− + = ;
( ) ( )f f =5) ;
( ) f f f + = +6) ;
( )f g f g + = +7) ;
1 f f⋅ =8) .

124
Agora, com relação a quaisquer matrizes A , B e C em Mn n× e para todo , ∈ , também são válidos os seguintes resultados:
A B B A+ = +1)
( ) ( )A B C A B C+ + = + +2) ;
se 3) O representa o função nula, isto é, (0 )ij n nO ×= , então A O A+ = ;
se 4) ( )ij n nA a ×= , então a matriz A− definida por ( )ij n nA a ×− = − é tal que ( )A A O+ − = ;
( ) ( )A A =5) ;
( )A A A + = +6) ;
( )A B A B + = +7) ;
1 A A⋅ =8) .
Observamos que os conjuntos considerados, quando munidos das operações de soma e multiplicação por escalares, apresentam propriedades algébricas comuns.
Na verdade, muitos outros conjuntos munidos das operações apropriadas apresentam propriedades semelhantes às anteriores.
E por isso que, em vez de investigar as propriedades de cada conjunto em particular, consideraremos um conjunto qualquer (desconside-rando a natureza de seus elementos) não vazio, V ( cujos elementos chamaremos genericamente de vetores), sobre o qual supomos es-tarem definidas uma operação de adição, isto é, para cada u, v V∈ , existe um único elemento de V associado, chamado a soma entre u e v e denotado por u v+ , e uma multiplicação por escalar, isto é, para cada u V∈ e ∈ , existe um único vetor associado, chamado de o produto de u pelo escalar e denotado por u .
Estamos agora em condições de introduzir o conceito de espaço vetorial.
3.2 Espaços Vetoriais
3.2.1 Definição
Diremos que um conjunto V , munido de duas operações: uma de adição e outra de multiplicação por escalar, é um espaço vetorial, se

125
para quaisquer u, v, w V∈ , e para todo escalar , ∈ , são váli-dos os seguintes axiomas:
Existe a operação de adição: u v+ está em V (fechado sob adição). Isto significa que a soma de dois elementos quaisquer de V é um único elemento em V .
EV1) u v v u+ = + para quaisquer u, v V∈ . A soma é comutativa em V .
EV2) u (v w) (u v) w+ + = + + para quaisquer u, v,w V∈ . A soma é associativa em V .
EV3) Existe um elemento 0 V∈ , chamado vetor nulo tal que0 u u+ = para todo u V∈ .
EV4) Para cada u V∈ existe u V− ∈ tal que u ( u) 0+ − = ; todo elemento de V admite o inverso aditivo ou oposto em V .
Existe a operação de multiplicação por escalar: u está em V (fechado sob multiplicação por escalar).
EV5) ( u) ( )u = para quaisquer u V∈ e , ∈ .
EV6) ( )u u u + = + para quaisquer u V∈ e , ∈ .
EV7) (u v) u v + = + para quaisquer u, v V∈ e ∈ ; distributividade em relação à soma em V .
EV8) 1u u= para qualquer u V∈ .
Observações:
Os elementos de 1) V são chamados de vetores.
Na maioria dos casos, os 2) escalares serão os números reais. Dessa maneira, nos referiremos a V como um espaço vetorial real (ou espaço vetorial sobre os números reais). É possível também tomarmos os escalares como números complexos ou pertencentes a . Os nossos exemplos serão de espaços veto-riais reais. Os escalares podem ser tomados de qualquer sis-tema numérico no qual podemos somar, subtrair, multiplicar e dividir de acordo com as leis habituais da aritmética.
O termo axioma é ori-ginado da palavra
grega (axioma), que significa algo que é considerado, ajustado ou adequado, ou que tem um significado evidente. En-tre os filósofos dos gregos antigos, um axioma era uma reivindicação que podia ser vista para ser verdade sem nenhuma necessidade de prova.
126
A definição de espaço vetorial não especifica quais elemen-3) tos formam o conjunto V . Também não especifica o que as operações chamadas “adição” e “multiplicação por escalar” devem ser.
O elemento 4) 0 , o vetor nulo , na propriedade EV3 é único, pois se existisse qualquer outro 0 ' V∈ satisfazendo a EV3,
teríamos: ( ) ( )por EV3 por EV1
0 ' 0 ' 0 0 0 ' 0= + = + = , isto é, 0 0 '= .
5) + e é soma e produto de escalares, respectivamente; u v+ é a soma de dois vetores em V ; u é o produto de um escalar por um vetor.
Outro exemplo de espaço vetorial, além dos apresentados no iní-cio do texto, é o conjunto dos vetores de 3
(vetores do espaço tri-dimensional), como foram apresentados em Geometria Analítica, munidos da adição e da multiplicação por escalar. Dessa forma, o adjetivo vetorial utilizado na definição acima deve ser entendido de uma forma mais ampla, sendo uma referência aos elementos de V , independentemente de serem ou não vetores 2
ou 3 .
3.2.2 Propriedades
Dos oito axiomas que definem um espaço vetorial, podemos deduzir várias outras propriedades. Alguma delas são relacionadas a seguir:
Seja u V∈ um espaço vetorial. Temos que:
O produto de qualquer escalar pelo vetor nulo é o vetor nulo, 1) isto é, para qualquer ∈ , 0 0 = .
O produto do escalar 2) 0 por qualquer vetor é o vetor nulo, isto é, para qualquer u V∈ , 0u 0= .
Se o produto de um escalar por um vetor é o vetor nulo, en-3) tão o escalar é 0 ou o vetor é o vetor nulo, isto é, se u 0 = , então 0 = ou u 0= .
O produto do oposto de um escalar por um vetor é igual ao 4) oposto de seu produto, isto é, para quaisquer ∈ e u V∈ , ( )u ( u) − = − .
Para quaisquer 5) , ∈ e u V∈ , ( )u u u − = − .

127
Para quaisquer 6) ∈ e u, v V∈ , (u v) u v − = − .
Para quaisquer 7) 1 2, , , , n ∈ e 1 2u , u , , un V∈
1 1u ( ) u
n n
j j j jj j
= =
=
∑ ∑ .
Para qualquer 8) u V∈ , ( u) u− − = .
Se 9) u w v w+ = + , então u v= .
Se 10) u, v V∈ , então existe um único w V∈ tal que u w v+ = .
A prova de algumas destas propriedades podem ser encontradas na bibliografia.
Qualquer dúvida, procure o tutor de seu pólo!
3.2.3 Exemplos
Talvez o exemplo mais simples de espaço vetorial seja o conjunto dos números reais com a adição e multiplicação por escalar em forma usual.
Mas geralmente, para cada n∈ , podemos transformar o con-junto das n -uplas ordenadas de números reais n
(um vetor de n
e uma matriz 1n× com componentes reais) em um es-paço vetorial, definindo a adição de duas n -uplas ordenadas
1 2x ( , , , )Tnx x x= e 1 2y ( , , , )T
ny y y= adicionando-se componen-te a componente, isto é, 1 1 2 2x y ( , , , )T
n nx y x y x y+ = + + + e o pro-duto de uma n -upla 1 2u ( , , , )T
nu u u= por um escalar ∈ por
1 2u ( , , , )Tnu u u =
Exemplo 1. Consideremos nV = com a soma e a multiplicação por escalar, definidas como anteriormente (as usuais). Para veri-ficarmos os oito axiomas de EV, consideremos 1 2x ( , , , )T
nx x x= ,
1 2y ( , , , )Tny y y= e 1 2z ( , , , )T
nz z z= . Tem-se que:
EV1) 1 1 2 2
1 1 2 2
x y ( , , , )
( , , , )y x
Tn n
Tn n
x y x y x yy x y x y x
+ = + + +
= + + += +

128
EV2) 1 1 1 2 2 2
1 1 1 2 2 2
1 1 1 2 2 2
x (y z) ( ( ), ( ), , ( ))
( , , , )
(( ) , ( ) , , ( ) )( )
Tn n n
Tn n n
Tn n n
x y z x y z x y zx y z x y z x y zx y z x y z x y z
x y z
+ + = + + + + + +
= + + + + + +
= + + + + + += + +
EV3) 1 2
1 2
1 2
0 x (0,0, ,0) ( , , , )
(0 ,0 , ,0 )
( , , , )x
T Tn
Tn
Tn
x x xx x x
x x x
+ = +
= + + +
==
EV4) 1 2 1 2
1 2 1 2
1 1 2 2
x ( x) ( , , , ) ( ( , , , ) )
( , , , ) ( , , , )
( , , , )
(0,0, ,0)0
T Tn n
T Tn n
Tn n
T
x x x x x xx x x x x xx x x x x x
+ − = + −
= + − − −
= − − −
==
EV5) 1 2
1 2
1 2
1 2
( x) ( ( , , , ) )
(( , , , ) )
( , , , )
( , , , )( )x
Tn
Tn
Tn
Tn
x x xx x x
x x xx x x
=
=
=
==
EV6) 1 2
1 2
1 1 2 2
1 2 1 2
( )x ( )( , , , )
(( ) , ( ) , , ( ) )
(( ), ( ), , ( ))
( , , , ) ( , , , )x x
Tn
Tn
Tn n
T Tn n
x x xx x x
x x x x x xx x x x x x
+ = +
= + + +
= + + +
= += +
EV7) 1 2 1 2
1 1 2 2
1 1 2 2
(x y) (( , , , ) ( , , , ) )
( , , , )
( ( ), ( ), , ( ))x y
T Tn n
Tn n
Tn n
x x x y y yx y x y x yx y x y x y
+ = +
= + + +
= + + += +

129
EV8) 1 2
1 2
1 2
1 x 1 ( , , , )
(1 ,1 , ,1 )
( , , , )x
Tn
Tn
Tn
x x xx x x
x x x
⋅ = ⋅
= ⋅ ⋅ ⋅
==
Nos seguintes exemplos deve-se conferir que os conjuntos são es-paços vetoriais.
Exemplo 2. Seja 2 ( )V P= o conjunto formado por todos os poli-nômios de grau menor ou igual a 2 com coeficientes reais. Defini-mos a adição e a multiplicação por escalar da seguinte maneira:
Se • 20 1 2( )p x a a x a x= + + e 2
0 1 2( )q x b b x b x= + + estão em 2P , en-tão 2
0 0 1 1 2 2( ) ( ) ( ) ( ) ( )p x q x a b a b x a b x+ = + + + + + é outro poli-nômio que tem grau no máximo 2 e, portanto, está em 2P . Aqui dizemos que a soma entre vetores, ou a soma vetorial é uma operação fechada.
Se • c é um escalar, então 20 1 2( )cp x ca ca x ca x= + + também
está em 2P . Também o produto por escalar é uma operação fechada.
Os dois primeiros axiomas são fáceis de verificar. Proceda como foi feito no exemplo anterior.
Você saberia dizer qual é o vetor nulo em 2P ?
Existe um polinômio cujo valor seja sempre igual a 0 para todo x ? O vetor nulo 0 é o polinômio zero, isto é, o polinômio cujos coeficientes são todos nulos: 0 0a = , 1 0a = e 2 0a = .
Confiramos EV4: o oposto de um polinômio 20 1 2( )p x a a x a x= + +
é o polinômio 2 20 1 2 0 1 2( ) ( )p x a a x a x a a x a x− = − + + = − − − .
A satisfação dos axiomas EV5 ao EV8 se segue das propriedades dos números reais.
Observe que, se mudarmos o enunciado neste exemplo para: “Seja
2 ( )V P= o conjunto formado por todos os polinômios de grau igual a 2 (e não menor ou igual a 2) com coeficientes reais”, não temos um espaço vetorial. Quais axiomas não são satisfeitos?

130
Confira se os conjuntos dos seguintes exemplos são espaços ve-toriais.
Exemplo 3. O conjunto das funções contínuas definidas num in-tervalo I ⊂ munido das operações de adição e multiplicação usuais.
Exemplo 4. O conjunto das matrizes m n× com coeficientes reais: ( )m nM × munido de operações análogas àquelas definidas para
matrizes quadradas.
Os espaços vetoriais acima citados envolvem operações com as quais você já deve estar familiarizado. O próximo exemplo é um pouco mais sofisticado do que os anteriores, no sentido de que definiremos as operações de adição e multiplicação por escalar em uma forma um pouco artificial (porém, que pode ser apro-priada em situações particulares), e por isso mostraremos as oito propriedades.
Exemplo 5. Como conjunto objeto de estudo, escolheremos o inter-valo semi-infinito (0, )V = ∞ , (o semi-eixo positivo da reta real). Este conjunto, quando agregado às operações de soma e multiplicação usuais, não é um espaço vetorial, visto que não possui elemento neutro para a adição: 0 V∉ (0 não pertence ao conjunto), logo, EV3 não é satisfeita. No entanto, se para ,x y V∈ e ∈, definirmos a soma entre x e y por x y xy⊕ = (o produto usual entre x e y) e o produto de x pelo escalar como x x = , então V se tor-na um espaço vetorial. De fato, verifiquemos uma a uma as oito propriedades:
EV1) temos x y xy yx y x⊕ = = = ⊕ para quaisquer x, y V∈ ;
EV2) x (y z) x(yz) (xy)z (x y) z⊕ ⊕ = = = ⊕ ⊕ para quaisquer x, y, z V∈ ;
EV3) se x V∈ , então como 1 V∈ , temos 1 x 1x x⊕ = = ; observe que, neste caso, 1 é o elemento neutro da adição, o qual denotaremos por o ;
EV4) se x V∈ , isto é, x 0> , então 1x V− ∈ e 1 1x x xx 1 o− −⊕ = = = ;
EV5) ( x) x (x ) x x ( ) x = = = = = para quaisquer x V∈ e , ∈ ;

131
EV6) ( )( ) x x x x ( x) ( x) ++ = = ⊕ = ⊕ para quaisquer x V∈ e + ∈ ;
EV7) (x y) (xy) (xy) x y ( x) ( y)x y ⊕ = = = = ⊕ = ⊕
(x y) (xy) (xy) x y ( x) ( y)x y ⊕ = = = = ⊕ = ⊕
para quaisquer x, y V∈ e ∈ ;
EV8) 11x x x= = para qualquer x V∈ .
3.2.4 Uma Definição Mais Formal
Você deve lembrar-se de que no início deste capítulo deixamos a definição de espaço vetorial, que chamamos de “um tanto formal ou rigorosa” em forma incompleta. Como prometido, essa defini-ção é colocada em forma íntegra.
Um conjunto V é um espaço vetorial sobre um corpo K , que denotamos como ( ,K, , )V + ∗ , se dadas duas operações: a soma vetorial definida em V , que denotamos como v w+ para todo v, w V∈ , e o produto escalar em V , que denotamos como v para todo v V∈ e K∈ , se cumpre as seguintes 10 propriedades (5 propriedades para a soma e 5 para o produto escalar).
Para a Soma
v w V+ ∈1) . A soma vetorial é uma operação fechada em V .
u (v w) (u v) w+ + = + +2) . Associatividade da soma vetorial em V .
Existe um elemento 3) 0 V∈ , tal que para todo v V∈ , v 0 v+ = . Existência do elemento neutro da soma vetorial em V .
Para todo 4) v V∈ , existe um elemento v V− ∈ , tal que v ( v) 0+ − = . Existência do elemento oposto respeito à soma vetorial em V .
v w w v+ = +5) . Comutatividade da soma vetorial em V .
Para o Produto por Escalar
v V ∈1) . O produto por escalar é uma operação fechada em V .
( v) ( )v =2) . Associatividade do produto entre escalares em V .
132
Se 3) 1 denota o elemento neutro da multiplicação do campo es-calar K , então 1v v= . Neutralidade do um do campo escalar.
(v w) v w + = +4) . Distributividade com respeito à soma vetorial.
( )v v v + = +5) . Distributividade com respeito à soma es-calar.
3.3 Subespaços Vetoriais
Considere o espaço vetorial 2 formado por todos os pontos
, com ,x y∈ .
À guisa de exemplo, consideremos dois subconjuntos de 2 : uma
reta que passa pela origem e o primeiro quadrante.
Definimos L como sendo um subconjunto de 2 formado pelos
pontos de uma reta que passa pela origem (0,0) , com equação 0x y + = , ou seja, 2{( , ) / 0}L x y x y = ∈ + = .
Observe que se ( , )( , )x y u v L∈ (dois pontos quaisquer da reta), temos que 0x y + = e 0u v + = , então ( ) ( ) 0x u y v + + + = , desde que ( , ) ( , ) (( ), ( ))x y u v x u y v L+ = + + ∈ . Portanto, a soma é fechada.
Vamos para os axiomas de espaço vetorial.
Note, primeiro de tudo, que 0 (0,0) L= ∈ ; assim, os axiomas do nulo e oposto são claramente satisfeitos em L . Também é fácil ver os de associatividade e comutatividade em relação à soma. Agora, se ( , )x y L∈ , então 0x y + = e ( , )cx cy L∈ também, des-de que ( ) ( ) 0cx cy + = . Podemos concluir que L satisfaz todos os axiomas de espaço vetorial? Confira. De fato, qualquer reta que passe pela origem é um espaço vetorial sobre 2
.
O que fizemos neste exemplo foi “extrair” de um espaço vetorial 2
outro espaço vetorial L “menor” e dizemos: L é um subespa-ço de 2
. Logo, L é fechado em relação à soma e à multiplicação por escalar, isto é, a soma de dois elementos em L é um elemento de L e a multiplicação de um elemento de L por um escalar tam-bém pertence a L .
Atenção: aqui mudamos levemente a notação introduzida num exemplo no inicio deste capítulo, e, que um ponto de foi denotado por .
133
Esta seção introduz uma das idéias mais importantes desta disci-plina. Começamos com um exemplo, vendo que há uma interação entre geometria e álgebra e que freqüentemente pode ser usada a intuição geométrica e lógica para introduzir propriedades e re-solver problemas. Agora, é necessário tornar-nos mais formais, estendendo este conceito para espaços vetoriais gerais. A noção de subespaço é simplesmente uma generalização algébrica de re-tas e planos que passam pela origem.
Dado o espaço vetorial V e o conjunto não vazio W V⊂ , se W é um espaço vetorial sobre o mesmo corpo K e com as mesmas leis de composição que em V , diremos que W é um subespaço de V .
3.3.1 Definição
Seja V um espaço vetorial. Dizemos que W V⊂ é um subespaço vetorial de V se forem satisfeitas as seguintes condições:
SE1) 0 W∈ , o vetor nulo está em W .
SE2) Se u, v W∈ , então u v W+ ∈ .
SE3) Se u W∈ , então u W ∈ para todo ∈.
Alternativamente, poderíamos dizer também que W é um subes-paço de V se, e somente se, W é um espaço vetorial.
Observações:
Note que todo subespaço vetorial 1) W de um espaço vetorial V é, ele próprio, um espaço vetorial.
O conjunto que consiste apenas no vetor nulo 2) {0} e o pró-prio V são chamados de subespaços vetoriais triviais.
Note que SE2 e SE3 podem ser reescritas equivalentemente como: se u, v W∈ e ∈ , então u v W+ ∈ . Assim, as condições para ser subespaço podem ser resumidas em:
0 W∈i) , o vetor nulo está em W .
Se ii) u, v W∈ e ∈ então u v W+ ∈ .

134
Comentário. De fato, esta definição de subespaço vetorial é um resultado bastante útil para mostrar que um conjunto é um espa-ço vetorial.
Observe que SE3 implica diretamente que 3) W ≠ ∅ (W não é vazio).
Portanto, todo subespaço é um espaço vetorial e todo espaço ve-torial é um subespaço (dele mesmo e, possivelmente, de outros espaços vetoriais maiores). O termo subespaço é usado quando pelo menos dois espaços vetoriais estão sendo considerados, um deles incluído no outro.
Desse modo, o “problema dos subespaços” consiste em determi-nar quando um subconjunto de um espaço vetorial continua sa-tisfazendo todos os axiomas de espaço vetorial. O procedimento padrão para resolver este problema utiliza simplesmente a verifi-cação das regras i) e ii), dadas anteriormente.
3.3.2 Exemplos
Vejamos alguns exemplos:
Exemplo 6. Seja o espaço vetorial 3V = e o conjunto W for-mado pelas triplas ordenadas de 3V = , tais que a tercei-ra componente é igual à soma das duas primeiras, isto é,
31 2 3 3 2 1{( , , ) / }W x x x x x x= ∈ = + .
Afirmamos que W é um subespaço de V , desde que:
O vetor nulo i) 1 2 3x ( , , ) (0,0,0)x x x= = esteja em W : 3
1 2 3x ( , , ) (0,0,0)x x x= = ∈ e a condição 3 2 1x x x= + seja sa-tisfeita para este vetor (0 0 0)= + .
Sejam ii) 1 2 3x ( , , )x x x= e 1 2 3y ( , , )y y y= vetores de W , tais que 3 2 1x x x= + e 3 2 1y y y= + ; ou seja, 1 2 2 1x ( , , )x x x x= + e
1 2 2 1y ( , , )y y y y= + ; com ∈ calculamos x y+ e temos que
1 2 2 1 1 2 2 1
1 1 2 2 2 2 1 1
1 2 2 1
x y ( , , ) ( , , )( , , )( , , )
x x x x y y y yx y x y x y x yz z z z W
+ = + + += + + + + += + ∈
135
Então W é subespaço e a equação 1 2 3 0x x x+ − = define um plano que passa pela origem.
Exemplo 7. Seja S o conjunto de todos os polinômios de grau me-nor ou igual a n , com a propriedade (0) 0p = . Verifiquemos se S é, de fato, um subespaço vetorial de nP .
Se 1) 0, 1ja j= = (todos os coeficientes nulos), então ( ) 0p x = e (0) 0p = .
Se 2) é um escalar e ( )p x S∈ , então (0) 0 0p = = e p S ∈ .
Se 3) ( )p x S∈ e ( )q x S∈ , então ( )(0) (0) (0) 0 0 0p q p q+ = + = + = e, portanto, p q S+ ∈ .
Exemplo 8. Em qualquer espaço vetorial V , o vetor nulo forma o subespaço zero {0}
Exemplo 9. ( )C (o espaço das funções contínuas) é um subes-paço de ( )F porque a adição e multiplicação por escalar de fun-ções contínuas são ainda contínuas. Em geral, ( )kC (o espaço das funções com k -ésima derivada contínua) é também um su-bespaço de ( )F .
Exemplo 10. O subconjunto { ( ) : (2) 0}H f F f= ∈ = é também um subespaço de ( )F ; se (2) (2) 0f g= = , então:
( )(2) (2) (2) 0f g f g+ = + = e ( )(2) ( (2)) 0cf c f= = .
Exemplo 11. O subconjunto { ( ) : ( ) ( )}K f F f t f t= ∈ = − das fun-ções pares é também um subespaço de ( )F ; se ( ) ( )f t f t= − e
( ) ( )g t g t= − , então:
( )( ) ( ) ( ) ( ) ( ) ( )( )f g t f t g t f t g t f g t+ = + = − + − = + − e ( )( ) ( ( )) ( ( )) ( )cf t c f t c f t cf t= = − = − .
Por outro lado, o subconjunto { ( ) : (2) 1}H f F f= ∈ = não é um subespaço de ( )F pois não contém a função nula, que é o vetor zero do espaço vetorial ( )F .
Exemplo 12. 3P é um subespaço de 5P . Por outro lado, H (con-junto de polinômios de grau maior ou igual a 3 e menor ou igual a 5} não é um subespaço de 5P . Um contra-exemplo servirá para

136
mostrar que não é subespaço. Sejam 4( ) 1p t t= + e 4( )q t t= − . Te-mos que ,p q H∈ , porém ( )( ) 1p q t H+ = ∉ .
Exemplo 13. As soluções 1 2 3 1 2 3{( , , ) / 0}T x x x x x x= + + = da equação homogênea são um subespaço de 3
. Se 1 2 3( , , )x x x e 1 2 3( , , )y y y T∈ , então 1 2 3 0x x x+ + = e 1 2 3 0y y y+ + = ; somando ambas igualda-des, temos 1 1 2 2 3 3( ) ( ) ( ) 0x y x y x y+ + + + + = , que satisfaz a equação homogênea e, então, pertencem a T . E também temos que
1 2 3 1 2 3 1 2 3 1 2 3( , , ) ( , , ) ( ) ( ) ( ) 0x x x x x x x x x x x x = ⇒ + + = + + =
que satisfaz a equação homogênea e, portanto, pertence a T .
As soluções de 1 2 3 1 2 3{( , , ) / 1}T x x x x x x= + + = (os pontos de um plano que não passam pela origem) da equação não-homogênea não é um subespaço de 3
, já que não contém o zero (0,0,0) .
O primeiro quadrante 1 2 1 2{( , ) / 0, 0}T x x x x= ³ ³ de 2 não é
um subespaço, desde que (1,1) T∈ , porém ( 1)(1,1) ( 1, 1) T− = − − ∉ .
Os seguintes casos mostram outros conjuntos que não são subes-paços de 2
.
Figura 3.3 - Não são subespaços.
O gráfico seguinte mostra uma reta passando pela origem como sendo um subespaço; entretanto, uma reta que não passa pela ori-gem não é um subespaço.

137
Figura 3.4 - Retas no plano.
Exemplo 14. 2 não é um subespaço de 3
. Em verdade, 2 está
definido por uma dupla de números reais, sendo que 3 são tri-
plas de números, assim 2 não está contido em 3
. Defina um plano coordenado do espaço tridimensional como sendo um su-bespaço de 3
.
Exemplo 15. O conjunto ( )Sym n das matrizes simétricas é um subespaço do espaço vetorial 2 2M × das matrizes n n× . A matriz que resulta da soma de matrizes simétricas é simétrica. Por outro lado, a matriz nula é simétrica e então pertence a ( )Sym n .
Exemplo 16. Seja 2 2MV ×= e {matrizes inversíveis 2 2}W = × . Deter-mine se W é um subespaço de 2 2M × . Se W fosse um subespaço, a
matriz nula deveria estar nele. Porém, 0 0
00 0
=
não é inversível
e, por isso, não pode estar em W . Logo, W não é um subespaço.
Em alguns dos nossos exemplos, vimos que subespaços aparecem como sendo exemplos de espaços vetoriais. De fato, temos que um subespaço, com as operações herdadas da soma e multi-plicação por escalar, é um espaço vetorial. A prova consiste em conferir as oito propriedades, a maior parte destas são herda-das de um espaço vetorial maior.
3.3.3 Soma e Intersecção de Subespaços
Sejam H e K subespaços de um espaço vetorial V . Definimos a soma de dois subespaços como {u v / u , v }H K H K+ = + ∈ ∈ e a intersecção como {u / u v }H K H K∩ = ∈ ∧ ∈

138
Figura 3.5 - Soma e intersecção de subespaços.
Observamos que a soma e a intersecção de espaços vetoriais são adaptações da união e intersecção de subconjuntos de espaços vetoriais. Enquanto a intersecção permanece sendo a mesma, a soma é diferente da união, já que, em geral, a união de dois subes-paços não é um subespaço.
Definição. Sejam H e K subespaços de V . Dizemos que V é a soma direta de H e K , e escrevemos H K⊕ , se são satisfeitas as seguintes condições:
V H K= ⊕i)
{0}H K∩ =ii)
Exemplo 17. Seja 2V = e sejam 2{( , ) / 0}H x y y= ∈ = e 2{( , ) / 0}K x y x= ∈ = . Então V é a soma direta de H e K . Se 2{( , ) }V x y= ∈ satisfaz:
( , ) , ( , ) ( ,0) (0, ) ( , )x y V x y x y x y H K∈ = + ⇒ ∈ ⊕i)
( , ) 0, 0 (0,0) {0}x y H K x y H K∈ ∩ ⇒ = = ⇒ ∩ = =ii)
Portanto V H K= ⊕ .
A soma direta de subespaços tem conseqüências importantes, uma vez que nos permite “decompor” os espaços vetoriais em termos de subespaços, dos quais se espera que sejam de natureza mais simples. De fato, a maioria dos teoremas de decomposição tem suas raízes conceituais nesta idéia.
A soma e a intersecção de subespaços são subespaços vetoriais.

139
3.3.4 O espaço Nulo de A
Introduziremos agora um dos mais importantes subespaços de associado a uma matriz.
Suponhamos que A seja uma matriz m n× . As soluções do siste-ma Ax 0= determinam um subespaço de n
chamado de espaço nulo de A , que denotaremos por (A) { / Ax 0}nnul x= ∈ = .
Consideremos agora alguns exemplos que são de fácil resolução.
Exemplo 18. Determine (A)nul para cada uma das seguintes matri-zes.
2 0A
4 10
= − a) b)
1 7B
3 21−
= −
Solução. a) Para achar o espaço nulo de A , podemos escalonar a matriz ou resolver um sistema de duas equações com duas in-cógnitas. Neste caso, a última opção é a mais direta e temos que
1 2 0x x= = é a solução. Em termos de vetores, a nossa solução consiste em um único vetor {0} , e então (A) {0}nul = .
b) Aqui temos infinitas soluções da forma 1 27 ,x x = = , onde é um escalar. Assim, já que o espaço nulo de B está formado por todas as soluções de Bx 0= da forma x (7 , ) (7,1)T T = = ,
sendo um número real, então 7
(B)1
nul
=
.
Veremos na próxima seção uma forma mais adequada de escrever este último resultado.
Podemos observar que o espaço nulo está descrito por todos os vetores associados aos pontos localizados na reta que passa pela origem com equação 1 27 0x x− = .
Voltemos agora aos nossos exemplos anteriores. O espaço nulo para a primeira matriz foi {0} . Para a segunda matriz, o espaço nulo foi uma reta passando pela origem. Lembrando os conceitos mencionados previamente, podemos ver que em ambos os casos, obtiveram-se subespaços de 2
.
Outros subespaços associados a uma matriz
serão estudados em seções posteriores.
Veremos outros exemplos de espaços
nulos na seção de Bases de um espaço vetorial.

140
De fato, isso acontecerá sempre, como estabelece o teorema a seguir.
Teorema. Seja A uma matriz m n× , então o espaço nulo de A será um subespaço de n
.
Prova. Sabemos que este subespaço está formado por todas as so-luções do sistema homogêneo Ax 0= . Primeiro, deveríamos con-ferir que o vetor zero ( 0 ), que está em n
é solução do sistema, e então deduziremos que o espaço nulo não é vazio, o que, neste caso, é trivial (qual é o produto que deve ser feito para mostrar isto?). Logo, ao saber que o espaço nulo tem, no mínimo, um vetor, escolheremos dois vetores x e y do espaço nulo e um escalar , e conferiremos as leis de composição interna.
Começamos pela soma.
A(x y) Ax Ay 0 0 0+ = + = + =
A soma z x y= + é a solução para Az 0= , então a soma está no espaço nulo. Portanto, o espaço nulo é fechado sob a soma.
Logo, testamos a multiplicação por escalar.
( x) Ax 0 0A = = =
Se x está no espaço nulo, todo múltiplo de x também está e o espaço nulo é fechado sob multiplicação por escalar.
Então o espaço nulo é um subespaço de n . Para verificar se um
vetor de V está no espaço nulo de A , basta calcular Ax e ver se Ax 0= .
3.4 Espaços GeradosO tópico da seção anterior nos permite introduzir um conceito chave desta disciplina. Voltemos para o item (b) do exemplo an-terior. Neste exemplo, vimos que o espaço nulo está formado por todos os vetores da forma x (7 , ) (7,1)T T = = (onde é um nú-mero real).
Tentaremos expressar este resultado em uma forma mais com-pacta e adequada, o que nos facilitará, entre outras coisas, a intro-dução de novos conceitos.

141
Para isso, revisaremos um conceito que foi introduzido em um capítulo anterior. Quando foram estudadas as operações com ma-trizes, calculamos combinações lineares de linhas das matrizes e combinações lineares das colunas de uma matriz.
Podemos também considerar uma combinação linear de vetores.
Definição. Dizemos que o vetor w de um espaço vetorial V é uma combinação linear dos vetores 1 2, , , nv v v V∈ se exis-tirem escalares 1 2, , , nc c c , tal que w possa ser escrito como
1 1 2 2w n nc v c v c v= + + + .
Podemos observar que o espaço nulo mencionado acima pode ser visto, de fato, como todas as combinações lineares do vetor (7,1)T . Até pode parecer estranho falar de uma combinação linear de um único vetor, porém, de acordo com a definição, não há impedi-mento para considerá-lo desta forma.
Provavelmente, não é a primeira vez que tenha encontrado uma combinação linear de vetores. Na disciplina Geometria Analítica, foi introduzido o espaço euclidiano junto com o que chamamos de vetores canônicos. O conjunto de vetores canônicos para n
foi de-finido como 1 (1,0, ,0)Te = , 2 (0,1, ,0)Te = ,
, (0,0, ,1)Tne = .
Vimos que qualquer vetor 1 2u ( , , , )T nnu u u= ∈ pode ser escrito
como 1 1 2 2u e e en nu u u= + + + .
Em outras palavras, poderíamos ver o vetor u como uma combi-nação linear dos vetores da base canônica 2, , ,l ne e e .
Exemplo 19. Determine, em cada caso, se o vetor w é uma com-binação linear dos vetores 1v e 2v .
w ( 12,20)T= −a) , 1v ( 1,2)T= − , 2v (4, 6)T= −
w (4,20)T=b) , 1v (2,10)T= , 2v ( 3, 15)T= − −
w (1, 4)T= −c) , 1v (2,10)T= , 2v ( 3, 15)T= − −
Solução. Em cada um destes casos, precisamos resolver
1 1 2 2w v vc c= + , isto é, achar 1c e 2c .

142
a) 1 21 2
1 2
4 12w ( 12,20) ( 1,2) (4, 6)
2 6 20T T T c c
c cc c
− + = −= − = − + − → − =
Se o sistema for consistente (isto é, possuir no mínimo uma solu-ção), então w é uma combinação linear de dois vetores; se não existir solução, então w não é uma combinação linear.
Deixamos para você verificar que a solução do sistema é 1 4c = e
2 2c = − .
Logo, w é uma combinação linear de 1v e 2v e pode ser escrito como 1 2w 4v 2v= − .
b) Repetindo o procedimento que fizemos no item anterior e resol-
vendo o sistema, obtemos como solução 1322
c t= + e 2c t= , onde
t é um escalar. Isto significa que w é uma combinação linear de
1v e 2v e pode ser escrita em um número infinito de diferentes combinações lineares. Algumas delas são, por exemplo:
1 2 1 2 1 2 1 24w 2v (0)v , w 8v 4v , w (0)v v , w v 2v3
= + = + = − = −
c) Neste último caso, não temos solução, e então w não pode ser escrito como uma combinação linear de 1v e 2v .
Embora estes exemplos sejam muito simples, o procedimento para um número maior de vetores continua sendo o mesmo.
Neste ponto, podemos dizer que sabemos como funciona uma combinação linear e responder quando um vetor é combinação linear de outro conjunto de vetores, e dessa forma, estamos em condições de avançar para o principal conceito desta seção.
Definição. Seja 1 2{v , v , , v }nS = um conjunto de vetores em um espaço vetorial V e seja W o conjunto de todas as combina-ções lineares dos vetores 1 2v , v , , vn . Dizemos que W é o espa-ço gerado pelos vetores 1 2v , v , , vn e escrevemos span( )W S= ou
1 2span{v , v , , v }nW = ou 1 2[{v , v , , v }]nW = . Também dizemos que 1 2v , v , , vn gera W .

143
Com esta notação, voltando ao exemplo do espaço nulo, temos
simplesmente que 7
( )1
nul A
=
.
Temos o seguinte teorema:
T eorema. Sejam vetores de um espaço vetorial V e o
espaço gerado, então temos que:
a) W é um subespaço de V.
b) W é o menor subespaço de V que contém todos os vetores .
Exemplo 20. Descreva o espaço gerado pelos seguintes conjuntos de vetores.
1v (1,0,0)T=a) , 2v (0,1,0)T=
1v (1,0,1,0)T=b) , 2v (0,1,0, 1)T= −
1
1 0v
0 0
=
c) , 2
0 0v
0 1
=
1v 1=d) , 2v x= , 33v x=
Solução. a) O espaço gerado, 1 2[v , v ] é o conjunto de todas as combinações lineares de 1v , 2v que podem ser escritas como:
1 2v ( ,0,0) (0, ,0)T Ta bv a b+ = + , sendo a e b escalares.
Logo, o espaço gerado são todos os vetores da forma 3( , ,0)Ta b ∈ , sendo a e b escalares arbitrários.
b) Este caso é muito similar ao anterior. A combinação linear geral é: 1 2v v ( ,0, ,0) (0, ,0, ) ( , , , )T T Ta b a a b b a b a b+ = + − = −
Assim, 1 2[v , v ] são todos os vetores de 4 da forma ( , , , )Ta b a b−
para quaisquer escalares a e b .
c) Escrevemos a combinação linear destes vetores
1 2
0 0 0 0v v
0 0 0 0a a
a bb b
+ = + =
Atenção! Neste item, o procedimento é
análogo aos itens a) e b), apenas com a diferença
que não estamos trabalhando em .

144
O espaço gerado, 1 2span{v , v }W = , é o subespaço das matrizes diagonais das matrizes 2 2M × .
d) A combinação linear geral, neste caso, é 3
1 2 3v v va b c a bx cx+ + = + + . Aqui, 1 2 3[{v , v , v }] é o subespaço dos polinômios de 3P que não têm o termo quadrático.
Vejamos agora se conseguimos determinar o conjunto de vetores que geram os espaços dos exemplos anteriores, de tal forma que qualquer vetor possa ser escrito como uma combinação linear dos vetores do conjunto.
Exemplo 21. Determine um conjunto de vetores que gerem exata-mente cada um dos seguintes espaços vetoriais.
nV = a)
2 2V M ×=b)
nV P=c)
Solução. Necessitamos achar um conjunto de vetores, tal que o espaço gerado por este conjunto seja exatamente o espaço dado. Em outras palavras, devemos mostrar que o espaço gerado do nos-so conjunto seja, de fato, o mesmo que o espaço vetorial dado.
O que deve ser feito para mostrar isso? Suponhamos que queremos mostrar que A e B são dois conjuntos iguais. Para isto, primeiro devemos mostrar que cada a em A também está em B, e então mostraremos que B, no mínimo, conterá totalmente o A. Analoga-mente, se cada b em B está em A, B está contido em A. Portanto, se temos que A contém B e B contém A, podemos concluir que A e B são o mesmo conjunto.
Assim, para os nossos exemplos, em cada caso, necessitamos exibir um conjunto de vetores geradores, tal que cada vetor do espaço vetorial dado V esteja nesse conjunto, para depois mostrar que cada vetor do conjunto gerador deve estar no espaço vetorial dado.
a) Já mostramos que cada vetor de n pode ser escrito como uma
combinação linear dos vetores canônicos, 1 2, , , ne e e , e assim os vetores canônicos geram um espaço que, no mínimo, contém todo
Pense no que realmente precisa ser verificado!

145
n . Por outro lado, já que qualquer combinação linear dos vetores canônicos deve ser um vetor de n
, podemos concluir que n
deve conter o espaço gerado pelos vetores canônicos.
Logo, o espaço gerado pelo conjunto de vetores canônicos deve ser n
.
b) Em um exemplo anterior, vimos que um conjunto de matrizes gera o espaço das matrizes diagonais de 2 2M × . Há uma extensão natural para que este conjunto gere o espaço de todas as matrizes 2 2× , acrescentando mais dois vetores ao conjunto dado. De fato, o seguinte conjunto faz isso.
1 2 3 4
1 0 0 1 0 0 0 0v , v , v , v
0 0 0 0 1 0 0 1
= = = =
Claramente, qualquer combinação linear destas quatro matrizes será uma matriz 2 2× , e então o espaço gerado por estas matrizes deve estar contido em 2 2M × .
Por outro lado, dada qualquer matriz de 2 2M × , 2 2
a bM
c d ×
∈
pode ser escrita como uma combinação linear destes vetores.
1 2 3 4v v v va b
A a b c dc d
= = + + +
, e assim, todo 2 2M × deve es-
tar contido no espaço gerado por estes vetores, de tal forma que estes vetores geram 2 2M × .
c) Lembremos que nP é o conjunto de todos os polinômios de grau menor ou igual a n . Usando um dos exemplos anterio-res como guia, estendemos o conjunto em forma natural para
12
1 2 3v 1, v , v , , v nnx x x+= = = = . Uma combinação linear desses
vetores é um polinômio de grau: n ou menor, e então estará em
nP . Logo, o espaço gerado estará em nP . Agora, podemos escrever qualquer polinômio de grau n ou menor,
20 1 2p n
na a x a x a x= + + + +
como a seguinte combinação linear:
0 1 1 2 2 3 1p v v v n na a a a v += + + + +
Então, todo nP está contido no espaço gerado por estes vetores, o que significa que 2[{1, , , , }]nx x x é exatamente nP .

146
Ainda é necessário discutir um último assunto sobre espaços ge-rados, e uma boa forma de fazer isso é através de um exemplo.
Exemplo 22. Determine se os seguintes conjuntos geram 3 .
1 2 3v (2,0,1) , v ( 1,3,4) , v (1,1, 2)T T T= = − = −a)
1 2 3v (1,2, 1) , v (3, 1,1) , v ( 3,8, 5)T T T= − = − = − −b)
Solução. a) Claramente, o espaço gerado por esses vetores estará em 3
. O problema agora é determinar se 3 estará contido no
espaço gerado por esses vetores.
No exemplo anterior, conseguimos responder com facilidade a esta questão. Entretanto, neste caso, não parece ser tão evidente.
Para resolver este problema, consideremos o seguinte procedimento:
Escolhamos arbitrariamente um vetor de 3 , 1 2 3u ( , , )Tu u u= , e
tentemos encontrar escalares 1 2 3, ,c c c , de tal forma que seja pos-sível escrever u como uma combinação linear dos vetores dados
1 2 3v , v , v . Ou seja,
1 2 3 1 1 2 2 3 3 1 2 3u ( , , ) (2,0,1) ( 1,3,4) (1,1, 2)T T T Tu u u c v c v c v c c c= = + + = + − + −
Igualando os respectivos componentes, obtemos o seguinte siste-ma de equações:
1 2 3 1
2 3 2
1 2 3 3
23
3 4 2
c c c uc c u
c c c u
− + =+ =
+ − =
Que podemos escrever em forma matricial como:
1 1
2 2
3 3
2 1 10 3 11 4 2
c uc uc u
− = −
.
Agora precisamos saber se o sistema é consistente (isto é, se possui ao menos uma solução) para cada escolha de 1 2 3u ( , , )Tu u u= . Se denotarmos a matriz dos coeficientes como A e calcularmos o determinante, temos que .
Como o det(A) é não nulo, então a matriz dos coeficientes é inver-sível, e assim o sistema possui sempre solução independentemente da escolha de 1 2 3u ( , , )Tu u u= . Isto equivale a dizer que é possível
Atenção: deixamos para você conferir!
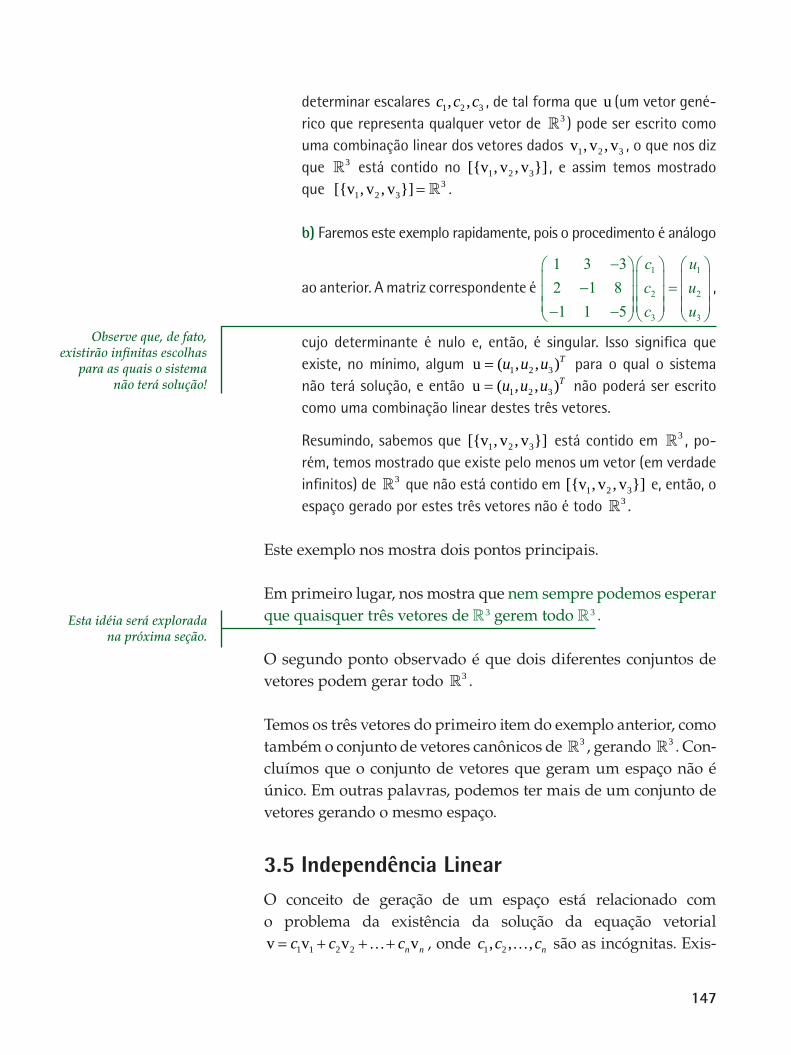
147
determinar escalares 1 2 3, ,c c c , de tal forma que u (um vetor gené-rico que representa qualquer vetor de 3
) pode ser escrito como uma combinação linear dos vetores dados 1 2 3v , v , v , o que nos diz que 3
está contido no 1 2 3[{v , v , v }] , e assim temos mostrado que 3
1 2 3[{v , v , v }] = .
b) Faremos este exemplo rapidamente, pois o procedimento é análogo
ao anterior. A matriz correspondente é ,
cujo determinante é nulo e, então, é singular. Isso significa que existe, no mínimo, algum 1 2 3u ( , , )Tu u u= para o qual o sistema não terá solução, e então 1 2 3u ( , , )Tu u u= não poderá ser escrito como uma combinação linear destes três vetores.
Resumindo, sabemos que 1 2 3[{v , v , v }] está contido em 3 , po-
rém, temos mostrado que existe pelo menos um vetor (em verdade infinitos) de 3
que não está contido em 1 2 3[{v , v , v }] e, então, o espaço gerado por estes três vetores não é todo 3
.
Este exemplo nos mostra dois pontos principais.
Em primeiro lugar, nos mostra que nem sempre podemos esperar que quaisquer três vetores de 3 gerem todo 3 .
O segundo ponto observado é que dois diferentes conjuntos de vetores podem gerar todo 3
.
Temos os três vetores do primeiro item do exemplo anterior, como também o conjunto de vetores canônicos de 3
, gerando 3 . Con-
cluímos que o conjunto de vetores que geram um espaço não é único. Em outras palavras, podemos ter mais de um conjunto de vetores gerando o mesmo espaço.
3.5 Independência LinearO conceito de geração de um espaço está relacionado com o problema da existência da solução da equação vetorial
1 1 2 2v v v vn nc c c= + + + , onde 1 2, , , nc c c são as incógnitas. Exis-
Observe que, de fato, existirão infinitas escolhas
para as quais o sistema não terá solução!
Esta idéia será explorada na próxima seção.
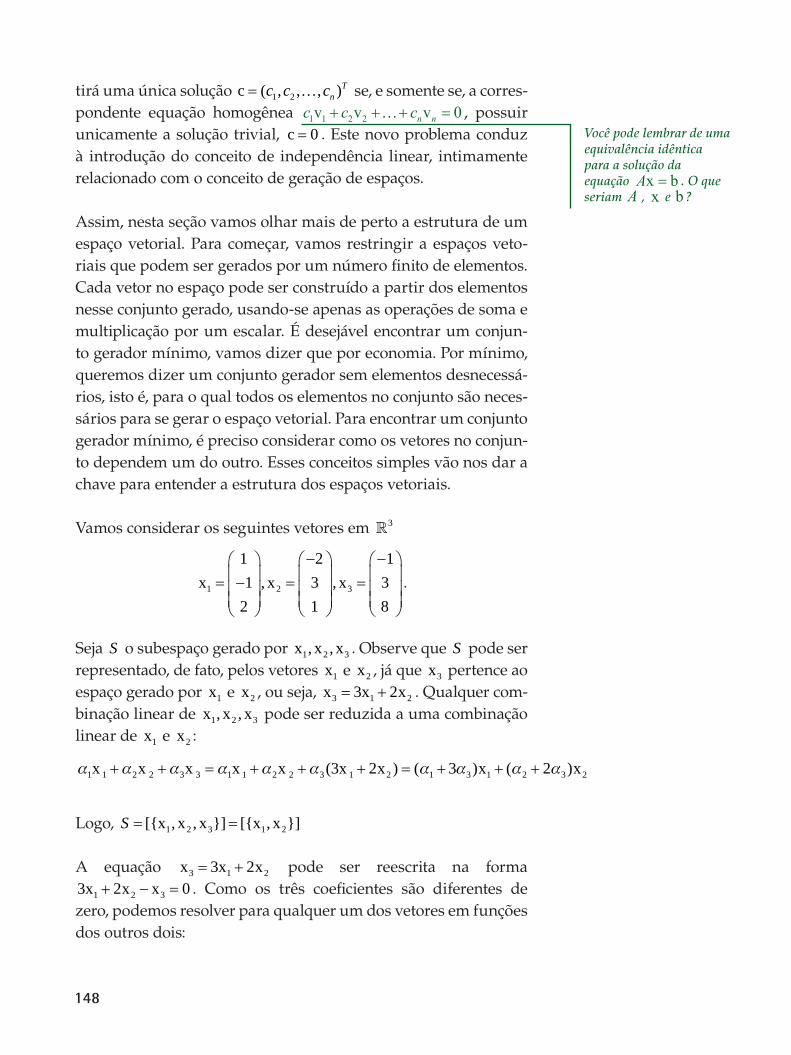
148
tirá uma única solução 1 2c ( , , , )Tnc c c= se, e somente se, a corres-
pondente equação homogênea , possuir unicamente a solução trivial, c 0= . Este novo problema conduz à introdução do conceito de independência linear, intimamente relacionado com o conceito de geração de espaços.
Assim, nesta seção vamos olhar mais de perto a estrutura de um espaço vetorial. Para começar, vamos restringir a espaços veto-riais que podem ser gerados por um número finito de elementos. Cada vetor no espaço pode ser construído a partir dos elementos nesse conjunto gerado, usando-se apenas as operações de soma e multiplicação por um escalar. É desejável encontrar um conjun-to gerador mínimo, vamos dizer que por economia. Por mínimo, queremos dizer um conjunto gerador sem elementos desnecessá-rios, isto é, para o qual todos os elementos no conjunto são neces-sários para se gerar o espaço vetorial. Para encontrar um conjunto gerador mínimo, é preciso considerar como os vetores no conjun-to dependem um do outro. Esses conceitos simples vão nos dar a chave para entender a estrutura dos espaços vetoriais.
Vamos considerar os seguintes vetores em 3
1 2 3
1 2 1x 1 , x 3 , x 3
2 1 8
− − = − = =
.
Seja S o subespaço gerado por 1 2 3x , x , x . Observe que S pode ser representado, de fato, pelos vetores 1x e 2x , já que 3x pertence ao espaço gerado por 1x e 2x , ou seja, 3 1 2x 3x 2x= + . Qualquer com-binação linear de 1 2 3x , x , x pode ser reduzida a uma combinação linear de 1x e 2x :
1 1 2 2 3 3 1 1 2 2 3 1 2 1 3 1 2 3 2x x x x x (3x 2x ) ( 3 )x ( 2 )x + + = + + + = + + +
Logo, 1 2 3 1 2[{x , x , x }] [{x , x }]S = =
A equação 3 1 2x 3x 2x= + pode ser reescrita na forma
1 2 33x 2x x 0+ − = . Como os três coeficientes são diferentes de zero, podemos resolver para qualquer um dos vetores em funções dos outros dois:
Você pode lembrar de uma equivalência idêntica para a solução da equação . O que seriam , e ?

149
1 2 3
2 1 3
3 1 2
2 1x x x3 33 1x x x2 2
x 3x 2x
= − +
= − +
= +
Temos, então, que 1 2 3 2 3 1 3 1 2[{x ,x , x }] [{x , x }] [{x ,x }] [{x ,x }]= = = .
Por causa da relação de dependência, o subespaço S pode ser gerado por qualquer dos dois vetores dados.
Por outro lado, não existe nenhuma relação de dependência entre
1x e 2x . De fato, se 1c e 2c forem escalares, tais que um deles é diferente de 0, e se 1 1 2 2x x 0c c+ = , então poderíamos resolver para um vetor em função do outro como:
21 2 1
1
x x ( 0)c cc
= − ≠ ou 12 1 2
2
x x ( 0)c cc
= − ≠ .
No entanto, nenhum dos dois vetores em pauta é múltiplo de ou-tro. Logo, 1[{x }] e 2[{x }] são subespaços próprios de S e a equa-ção 1 1 2 2x x 0c c+ = só será satisfeita se 1 2 0c c= = .
Podemos generalizar esses exemplos fazendo as seguintes obser-vações:
Se i) 1 2v , v , , vn gera um espaço vetorial V e um desses veto-res pode ser escrito como um combinação linear dos outros
1n − vetores, então esses outros 1n − vetores geram V .
Dados ii) n vetores 1 2v , v , , vn , é possível escrever um dos ve-tores como uma combinação linear de outros 1n − vetores se, e somente se, existem escalares 1 2, , , nc c c nem todos nu-los, tais que 1 1 2 2v v v 0n nc c c+ + + = .
Definição. Os vetores 1 2v , v , , vn , em um espaço vetorial V , são ditos linearmente independentes se a combinação linear dos vetores
1 2v , v , , vn for igual ao vetor nulo, isto é: 1 1 2 2v v v 0n nc c c+ + + = . Isto implica, necessariamente, que todos os escalares 1 2, , , nc c c devem ser iguais a zero.

150
Como conseqüência de (i) e (ii), vemos que se 1 2{v , v , , v }n é um conjunto gerador mínimo, então 1 2v , v , , vn são linearmente in-dependentes. Em contrapartida, se 1 2v , v , , vn são linearmente independentes e geram V , então 1 2{v , v , , v }n é um conjunto gerador mínimo para V . Um conjunto gerador mínimo é cha-mado de base.
Exemplo 23. Os vetores 11
e 12
são linearmente independen-
tes, pois se 1 2
1 1 01 2 0
c c + =
, então 1 2
1 2
02 0
c cc c+ =
+ =. E a única solu-
ção desse sistema é 1 2 0c c= = .
Definição. Os vetores 1 2v , v , , vn , em um espaço vetorial V , são ditos linearmente dependentes se existem escalares 1 2, , , nc c c nem todos nulos (pelo menos um deles diferente de zero), tais que 1 1 2 2v v v 0n nc c c+ + + = .
Exemplo 24. Seja x (1,2,3)T= . Os vetores 1 2 3x,e ,e ,e são linearmen-te dependentes, já que a combinação linear nula 1 2 3e e e x 0+ + − = não implica que todos os coeficientes 1 2, , , nc c c sejam nulos. (De fato, veja que neste caso 1 2 3 41, 2, 3, 1c c c c= = = = − ).
Definição. Seja 1 2{v , v , , v }nS = um conjunto de no mínimo dois vetores ( 2)n ≥ em um espaço vetorial V . Então S é linearmente dependente se, e somente se, um desses vetores pode ser escrito como uma combinação linear dos restantes.
As duas últimas definições estabelecem diferentes formas de ca-racterizar um conjunto linearmente dependente.
Veja, no exemplo anterior, que é imediato escrever x como uma combinação linear de 1 2 3, ,e e e .
Dado um conjunto de vetores 1 2{v , v , , v }n , em um espa-ço vetorial V , é trivial encontrar escalares 1 2, , , nc c c , tais que
1 1 2 2v v v 0n nc c c+ + + = . Basta definir 1 2 = 0nc c c= = = .
O conceito de base será estudado com mais detalhes logo adiante.

151
Se existem escolhas não-triviais de es-calares (quer dizer, escalares diferentes
de zero) para os quais a combinação linear é igual ao vetor nulo, então
o conjunto é linearmente dependente.
Se a única maneira de a combinação linear dos vetores ser igual ao vetor nulo for quando todos os escalares forem iguais a zero, então são linearmente independentes.
Uma Interpretação Geométrica Intuitiva da Independência Linear
Um vetor u é linearmente independente se a combinação linear nula u 0c = implica necessariamente que 0c = . Esta implicação se cumpre se, e somente se, u 0≠ . Então podemos concluir que u é linearmente independente, ou seja, u 0≠ .
u
u
Figura 3.6 - Independente e dependente.
O espaço gerado por um único vetor é uma reta passando pela ori-gem. Span{v} está formado por todos os múltiplos de v , que têm a mesma direção de v . Os pontos extremos desses vetores estão sobre uma reta cuja equação vetorial é 0r v rt= + , onde t é um escalar.
Dois vetores u , v são linearmente dependentes se existem e , ambos não nulos, tais que u v 0 + = . Se 0a ≠ , então temos u ( )v = − . Se 0 ≠ , então temos v ( )u = − . Assim, pode-mos concluir que:
Dois vetores são linearmente dependentes se um deles é múltiplo escalar do outro. Em outras palavras, os vetores são paralelos.

152
Poderia enunciar qual é a equivalência contrária?
Dois vetores são linearmente independentes se os vetores não são paralelos e, então, não são múltiplos entre si.
v
wv w
Figura 3.7 - Vetores linearmente independentes e dependentes.
O espaço gerado por dois vetores linearmente independentes é um plano contendo a origem. Para ver isto em 3
, sejam v e w dados por 1 2 3v ( , , )Tv v v= e 1 2 3w ( , , )Tw w w= , respectivamente. O plano ge-rado por v e w tem um vetor normal dado por , cuja equa-ção vetorial é 1 2 3(v w) ( 0, 0, 0) 0Tx x x× ⋅ − − − = , onde 1 2 3x ( , , )Tx x x= é um vetor que pertence ao plano gerado por v e w . Esta equação, em termos das componentes dos vetores, é dada por:
2 3 3 2 1 3 1 1 3 2 1 2 2 1 3( ) ( ) ( ) 0 (1)v w v w x v w v w x v w v w x− + − + − = (1)
Entretanto, se por outro lado escrevemos 1 2 3x ( , , )Tx x x= como uma combinação linear de v e w , (x v w) = + , temos:
1 1 1
2 2 2
3 3 3
x v wx v wx v w
= += += +
Que pode ser reescrito em forma matricial como, e após escalona-mento, como:
Que possui solução se, e somente se,
1 3 2 1 1 2 2 1 1 2 2 1 1 3 3 1( )( ) ( )( ) 0v x v x v w v w v x v x v w v w− − − − − = .
Isto é, produto vetorial de e .

153
Que não é outra coisa que a equação vetorial (1) anterior. Assim, vemos que dois vetores linearmente independentes geram um plano contendo esses vetores.
Para três vetores u, v, w serem linearmente dependentes, , , , em todos zeros, ficam u v w 0 + + = . Se 0 ≠ , então u ( )v ( )w = − + − está em um plano, em uma reta ou ain-da em um ponto, (dependendo do grau de dependência dos três vetores) gerado por v e w . Em particular, os três vetores estão no mesmo plano (coplanares). Argumentos similares podem ser colocados nos casos que outros coeficientes sejam zero. Coloque três lápis em uma mesa com os extremos das borrachas juntos para ter um exemplo gráfico de vetores coplanares. Assim:
Três vetores são linearmente dependentes se estes vetores •estão no mesmo plano.
A independência linear de três vetores pode ser entendida pela proposição contrária.
vw
u
wv
u
Figura 3.8 - Independência linear.
Estas idéias podem ser estendidas para o caso de vários vetores. As seguintes equivalências podem ser úteis para a compreensão dos conceitos.
“Vetores linearmente dependentes: significa que um deles é •uma combinação dos outros.”
Investiguemos a relação entre independência linear e geração de espaços.
A independência linear de um conjunto de vetores pode ser •visualizada geometricamente como um espaço se expandin-

154
do na medida em que cada um dos vetores acrescenta uma nova direção, aumentando a dimensão do espaço. Isto pode ser pensado em termos de máxima eficiência na geração do espaço, desde que todos os vetores sejam aproveitados. Ou seja, a eliminação de qualquer vetor produzirá um espaço gerado menor.
3.5.1 Propriedades da Independência Linear
A primeira propriedade está relacionada com a permanência da independência linear quando eliminamos vetores.
Se o conjunto • é linearmente independen-te. é linearmente independente.
É fácil entender esta propriedade da independência linear, no sentido que não há desperdício: se uma equipe de cinco pessoas é imprescindível para realizar uma determinada tarefa, então qual-quer subgrupo de quatro (ou três, duas ou uma delas) também é necessário, porém, não será capaz de realizar a tarefa em forma completa.
Formulemos a propriedade recíproca da propriedade acima:
Se • 1 2v , v , , vk são linearmente independentes e 1vk+ perten-ce ao espaço gerado por 1 2{v , v , , v }k , então 1 2 1v , v , , v , vk k+ são linearmente dependentes, de forma similar à geração de espaços.
Os procedimentos mostrados nos exemplos seguintes são úteis para determinar a independência linear de um conjunto de vetores.
Exemplo 25. Neste exemplo, mostraremos que os vetores
1v (1, 1,0,1)= − , 2v (3, 1,4,3)= − , 3v (2, 1,2,2)= − , 4v (0,1,4, 2)= − e
5v (1,0,3,0)= são linearmente dependentes, utilizando operações elementares sobre a matriz:
1 2 3 4 5
1 3 2 0 11 1 1 1 0
[ ]0 4 2 4 31 3 2 2 0
TA v v v v v
− − − = =
−
.
Atenção: compare com o efeito na geração de um espaço.

155
As colunas de A são os vetores 1 2 3 4 5[ ]v v v v v . Podemos usar as operações elementares por colunas sobre A (ou por linhas sobre TA ) para simplificar os vetores e obter a resposta. A forma escalonada por colunas é:
1 0 0 0 01 1 0 0 0
0 2 1 0 01 0 1 0 0
−
−
Observamos agora que os cinco vetores da forma escalonada são claramente linearmente dependentes. Por exemplo, a combinação linear com coeficientes 1 0c = , 2 0c = , 3 0c = , 4 1c = , 5 0c = (nem todos nulos) com as colunas da forma escalonada é igual ao vetor zero, e então o conjunto das colunas é linearmente dependente. Desde que a propriedade de independência linear de um conjun-to de vetores não mude pelas operações elementares, concluímos que 1 2 3 4 5v , v , v , v , v são linearmente dependentes.
O exemplo anterior nos conduz a observações interessantes. Pri-meiro, para vetores euclidianos, a preservação da independência linear sob operações elementares pode ser revista em termos de operações por colunas.
Se A é equivalente a B por operações por colunas, então colunas de B linearmente independentes correspondem a colunas de A , também linearmente independentes.
Em segundo lugar, observamos uma propriedade do tipo numé-rico dimensional.
Se • 1 2v , v , , v nn ∈ são linearmente independentes, então
k n≤ .
Aproveitemos este exemplo para introduzir o seguinte teorema. Se considerarmos apenas os vetores 1 2 3 4v , v , v , v , teremos:
1 2 3 4
1 3 2 01 1 1 1
A [v v v v ]0 4 2 41 3 2 2
− − − = =
−
.

156
E agora a sua respectiva forma escalonada por colunas é:
1 0 0 01 1 0 0
0 2 1 01 0 1 0
−
−
Claramente esta matriz é singular.
Teorema. Sejam 1 2x , x , , xn , n vetores em n , com 1 2x (x , x , , x )T
n= para 1, ,i n= . Se 1 2[x , x , , x ]nA = , então os vetores 1 2x , x , , xn são linearmente dependentes se, e somente se, A é singular.
Demonstração. A combinação linear nula
1 1 2 2x x x 0n nc c c+ + + = é equivalente ao sistema de equações:
1 11 2 12 1
1 21 2 22 2
1 1 2 2
x x x 0x x x 0
x x x 0
n n
n n
n n n nn
c c cc c c
c c c
+ + + =+ + + =
+ + + =
Definido 1 2c ( , , , )Tnc c c= , o sistema pode ser escrito em forma
matricial como c 0A = .
Essa equação tem uma solução não trivial se, e somente se, a A é singular. Portanto, 1 2x , x , , xn são linearmente dependentes se, e somente se, A é singular.
Podemos usar o teorema anterior para testar se n vetores são li-nearmente independentes em n
. Basta formar a matriz A , cujas colunas são os vetores a serem testados. Para determinar se A é ou não singular, basta calcular o valor do determinante de A . Se det(A) 0= , os vetores são linearmente dependentes. Se det(A) 0≠ , os vetores são linearmente independentes.
Voltando ao exemplo anterior, temos que:
1 3 2 01 1 1 1
det(A) 00 4 2 41 3 2 2
− − −= =
−
e então os vetores são linearmente dependentes.

157
Determinantes podem ser usados para decidir se um conjunto de vetores de um espaço vetorial de funções que sejam suficien-temente suaves (possuam derivadas contínuas) é linearmen-te independente. Sejam ( )f x , ( )g x C (1) então, o determinante
( ) ( )'( ) '( )
f x g xW
f x g x= é conhecido como Wronskiano de f e g . Po-
demos provar que f e g são linearmente independentes, caso seu Wronskiano não seja identicamente nulo, isto é, caso exista algum x , tal que 0W ≠ .
Exemplo 26. Verifique que o conjunto 2 2{sen ,cos }x x é linearmente independente, usando o Wronskiano 2 2(sen ,cos )W x x .
Chamando 2( ) senf x x= e 2( ) cosg x x= ,
2 22 2
3 3
2 2
sen cos(sen ,cos ) ( )
2sen cos 2sen cos
2sen cos 2sen cos2sen cos (sen cos )2sen cos
x xW x x W x
x x x x
x x x xx x x xx x
= =−
= − −
= − += −
E, por exemplo, 14
W = −
, ou seja, o wronskiano não é identica-
mente nulo e o conjunto 2 2{sen ,cos }x x é linearmente independente.
É possível generalizar este resultado para um conjunto de fun-ções 1 2( ), ( ), , ( )nf x f x f x .
Teorema. Sejam 1 2v , v , , vn em um espaço vetorial V . Um vetor pode ser escrito de maneira única, como uma combinação linear 1 2v , v , , vn se, e somente se, 1 2v , v , , vn são linearmente independentes.
Demonstração. Se 1 2v [{v , v , , v }]n∈ , então v pode ser escrito como uma combinação linear:
1 1 2 2v v v v (1)n n = + + + (1)
Suponha que v também possa ser expresso como uma outra com-binação linear:
1 1 2 2v v v v (2)n n = + + + (2)
é o espaço vetorial de todas as funções
com derivada contínua.
Wronskiano é um ope-rador que se aplica
especialmente no estudo de equações diferenciais, para determinar se o con-junto solução é linearmen-te independente. O nome desse operador é uma ho-menagem ao matemático polonês Josef Wronski.

158
Vamos mostrar que se 1 2v , v , , vn são linearmente independentes, então i i = , e por outro lado, se são linearmente dependentes, então é possível escolher os i diferentes dos i , isto é, i i ≠ .
Se 1 2v , v , , vn são linearmente independentes, subtraindo (1) de (2), obtemos 1 1 1 2 2 2( )v ( )v ( )v 0n n n − + − + + − = .
Pela independência linear de 1 2v , v , , vn , os coeficien-tes desta última equação devem ser todos iguais a zero. Logo,
1 1 2 2, , , n n = = = .
Portanto, a representação é única quando 1 2v , v , , vn são linear-mente independentes.
Por outro lado, se 1 2v , v , , vn são linearmente dependentes, exis-tem ic , nem todos nulos, tais que 1 1 2 20 v v vn nc c c= + + + .
Escolhendo, então, i i ic = + , ( 1, , )i n= e depois somando, obtemos
1 1 1 2 2 2 1 1 2 2v ( )v ( )v ( )v v v vn n n n nc c c = + + + + + + = + + +
Como os ic não são todos nulos, i i ≠ para pelo menos um valor de i . Portanto, se 1 2v , v , , vn são linearmente dependen-tes, a representação de um vetor como uma combinação linear de
1 2v , v , , vn não é única.
Para determinar se um conjunto de vetores é ou não linearmente independente em n
, precisamos resolver um sistema homogê-neo de equações lineares. Uma situação ocorre com outros espa-ços vetoriais, como se mostra nos exemplos a seguir.
Exemplo 27. Determine quando 2 2{1 , ,1 }S x x x x= + + + é linear-mente independente em 2P .
Solução. Considere a seguinte combinação linear:
2 2(1 ) ( ) (1 ) 0x x x x + + + + + = .
Reagrupando convenientemente os termos do lado esquerdo da equação, podemos escrever
2
2
( ) ( ) ( ) 00 1 0 0 0
x xx x
+ + + + + =
⋅ + ⋅ + ⋅ =

159
Sabemos que um polinômio é identicamente nulo quando todos os seus coeficientes são zero. Assim, igualando os respectivos coefi-cientes das potências de x , temos: 0 + = , 0 + = , 0 + = , que possui apenas a solução trivial 0 = = = .
Logo, S é linearmente independente.
Exemplo 28. Mostre que o conjunto de 2 2M × , formado por
1 1 1 0 1 2, ,
0 3 2 1 6 9S
− − =
, é um conjunto linearmente de-
pendente e, em seguida, escreva um destes vetores como uma combinação linear dos outros.
Solução. Considere a seguinte cominação linear nula
1 1 1 0 1 2 0 00 3 2 1 6 9 0 0
− −
+ + =
.
Esta equação é equivalente ao sistema:
02 0
2 6 03 9 0
− − =− =+ =
+ + =
,
onde , , é solução, sendo k arbitrário.
Logo, S é linearmente dependente. Por exemplo, se escolhermos 1k = , temos que:
1 1 1 0 1 2 0 02 3
0 3 2 1 6 9 0 0− −
− − + =
,
e assim, podemos escrever
1 1 1 0 1 23 10 3 2 1 6 92 2
− − = − +
,
ou também
1 2 1 1 1 02 3
6 9 0 3 2 1− −
= +
,
ou ainda1 0 1 1 1 22 1
2 1 0 3 6 93 3− −
= − +
.
Atenção: verifique essa solução!

160
3.6 Bases e Dimensão
O conjunto de vetores {(1,1) , (1, 1) }T TS = − gera 2 , isto é, qualquer
vetor em 2 é uma combinação linear de (1,1)T e (1, 1)T− .
O conjunto de vetores {(1,1) , (1, 1) , (1,0) }T T TT = − também gera 2 .
Os conjuntos S e T diferem entre si: S é linearmente indepen-dente, enquanto T é linearmente dependente, o que faz diferença quando escrevemos um vetor como uma combinação linear dos vetores de cada um dos conjuntos.
Por exemplo, para escrevermos (2, 4)T em termos dos vetores de S , conseguimos de uma única maneira: (2, 4) 3(1,1) (1, 1)T T T= − − .
Entretanto, em termos dos vetores de T , temos várias possibili-dades:
(2, 4) 3(1,1) (1, 1) 0(1,0)(2,4) 0(1,1) 4(1, 1) 6(1,0)(2,4) 4(1,1) 0(1, 1) 2(1,0)
T T T T
T T T T
T T T T
= − − +
= − − +
= + − −
ou, em geral, (2, 4) ( 4)(1,1) (1, 1) ( 2 2 )(1,0)T T T Tk k k= + + − + − − .
O ponto chave é: se um conjunto de vetores gera V e esse conjun-to for linearmente dependente, então a representação de um vetor x em termos dos vetores desse conjunto não é única.
Para se ter unicidade, o conjunto gerador deve ser também line-armente independente. Um conjunto assim é chamado de uma base para V .
Em geral, considere a equação vetorial 1 1 2 2v v v vn nc c c+ + + = em um espaço vetorial V , onde 1 2, , , nc c c são as incógnitas. A existência de soluções para todo v V∈ é equivalente a ter V gera-do pelos vetores 1 2v , v , , vn . Entretanto, a propriedade de indepen-dência linear sobre 1 2v , v , , vn garantirá a unicidade da solução.
Definição. Os vetores 1 2v , v , , vn formam uma base para o es-paço vetorial V se, e somente se, 1 2v , v , , vn são linearmente in-dependentes e geram V .

161
Assim, para determinar se um conjunto de vetores é uma base para V , é suficiente verificar se o conjunto gera V e é linearmente independente.
Exemplo 29. Mostre que o conjunto {(1,2) , (3, 1) }T TS = − é uma base para 2
.
Solução. Devemos mostrar que S é linearmente independente, o que equivale a mostrar que (1, 2) (3, 1) (0,0)T T T + − = tem como única solução 0 = = , ou que (1, 2) (3, 1) ( , )T T Ta b + − = tem uma única solução para qualquer ( , )Ta b .
Estas equações podem ser escritas matricialmente (em sua forma aumentada) como:
1 32 1
ab
−
e 1 3 02 1 0 −
.
Em vez de resolver ambos os sistemas separadamente, (por econo-mia) o resolvemos simultaneamente, trabalhando com uma matriz duplamente aumentada:
1 3 02 1 0
ab
−
.
Escalonando, obtemos:
gereção
independência linear
1 3 00 1 ( 2 ) 7 0
ab a
− +
.
Achamos, para geração, que ( 3 ) 7 , (2 ) 7a b a b = + = − e, para independência linear, que 0 = = . Já que S é linearmente inde-pendente e gera 2
, é uma base para 2 .
Neste exemplo, os coeficientes da combinação linear são únicos para um vetor ( , )Ta b dado. O que é verdade, em geral.
Teorema. Seja 1 2{v , v , , v }nS = uma base para um espaço ve-torial V . Seja v um vetor em V . Os coeficientes na representação
1 1 2 2v v v vn nc c c= + + + são únicos.

162
Prova. Suponhamos que temos duas representações para v :
1 1 2 2v v v vn na a a= + + + e 1 1 2 2v v v vn nb b b= + + + . Mostrare-mos que os coeficientes são iguais.
Para isto, formamos a soma v ( v)+ − , que é igual a 0 . Recombi-nando os diferentes termos, obtemos
1 1 1 2 2 20 v ( v) ( )v ( )v ( )vn n na b a b a b= + − = − + − + + − .
Desde que S seja uma base com um conjunto de vetores linear-mente independentes, os coeficientes da combinação linear devem ser todos iguais a zero. Isto é, 1 1 2 2, , , n na b a b a b= = = , os coefi-cientes da combinação linear original são os mesmos.
Exemplo 30. Os vetores canônicos 1e (1,0,0)= , 2e (0,1,0)= e
3e (0,0,1)= geram 3
e são linearmente independentes. Logo, o conjunto 1 2 3{e ,e ,e } é uma base para 3
. Este fato se estende natu-ralmente para os vetores canônicos de n
.
Exemplo 31. Os monômios 1, , , nt t geram nP e são linearmente independentes. Logo, são uma base para nP .
Exemplo 32. As seguintes igualdades:
11 12 21 22
1 0 0 1 0 0 0 0E E E E
0 0 0 0 1 0 0 1a b
A a b c d a b c dc d
= = + + + = + + +
têm duas implicações. Qualquer matriz 2 2× é uma combinação li-near de 11 12 21 22E , E ,E ,E . Se a combinação linear de 11 12 21 22E ,E ,E ,E (com , , ,a b c d como coeficientes) é a matriz nula, então todos os coeficientes de A (que são , , ,a b c d ) devem ser zero.
A primeira implicação significa exatamente que 2 2M × é gerado por
11 12 21 22E , E ,E ,E e a segunda que 11 12 21 22E , E ,E ,E são linearmente independentes. Logo, 11 12 21 22{E ,E ,E ,E } é uma base para 2 2M × .
Em geral, seja Eij uma matriz m n× , cujas entradas são todas iguais a zero, exceto na entrada correspondente a ,i j , que é igual a um para qualquer vetor 1 1 1b ( , , )Tb b b= . Então, {E :1 ,1 }ij i m j n≤ ≤ ≤ ≤ é uma base para m nM × .

163
Exemplo 33. O sistema
1 2 3
1 2 3
1 2 3
3 22
2 2 6
x x xx x x
x x x
+ − =− + =+ + =
tem uma única solução (confira!). Já que o número de linhas e colunas é igual, sabemos que o sistema mais geral:
1 2 3 1
1 2 3 2
1 2 3 3
3
2 2
x x x bx x x b
x x x b
+ − =− + =+ + =
possui uma única solução para qualquer vetor 1 1 1b ( , , )Tb b b= (por quê?). Já que esse sistema é a mesma coisa que a equação vetorial:
1 2 3 1 2 3(3,1, 2) (1, 1,2) ( 1,1,1) ( , , )x x x b b b+ − + − =
e isto implica que os vetores (3,1, 2) , (1, 1, 2)− , ( 1,1,1)− geram 3 ,
e a unicidade implica que os três vetores são linearmente inde-pendentes. Concluímos, então, que os três vetores formam uma base para 3
.
Os argumentos utilizados neste último exemplo se aplicam, em geral, a conjuntos de vetores euclidianos. Uma base para n
sem-pre significa a existência de n vetores linearmente independentes.
Se as colunas de uma matriz A formam uma base para n , en-
tão A deve ser uma matriz n n× . Você precisa de n vetores de n
linearmente independentes para gerar todo n . É interessante a
seguinte equivalência:
Colunas de • A formam uma base de n ⇔ Ax b= tem uma
única solução para qualquer b .
Exemplo 34. Em muitas aplicações, é necessário encontrar um subespaço particular de um espaço vetorial. Isto pode ser feito encontrando-se os elementos de uma base para o subespaço. Por exemplo, para encontrar todas as soluções do sistema
1 2 3
1 2 4
02 0
x x xx x x+ + =+ + =
164
precisamos encontrar o núcleo da matriz 1 1 1 02 1 0 1
A =
, que é o subespaço de 4
gerado pelos vetores:
12
10
−
e
1101
−
.
Como esses dois vetores são linearmente independentes, eles for-mam uma base para 4
.
Exemplo 35. Mostre que o conjunto {(1,2) , (3, 1) , (1,0) }T T TS = − não é uma base para 2
.
Solução. O conjunto S é linearmente dependente, já que, por exemplo, (1, 2) 2(3, 1) 7(1,0) (0,0)T T T T+ − − = . Então S não pode ser uma base para 2
.
Comentário. Apenas temos que mostrar que uma das condições dadas na definição de base não é satisfeita, neste caso a indepen-dência linear.
Exemplo 36. O espaço vetorial formado apenas pelo vetor zero não possui uma base porque qualquer subconjunto de vetores, incluindo o vetor zero, é linearmente dependente.
Para mostrar que nem todo espaço possui uma base, precisamos decidir sob quais condições um espaço vetorial dado possui uma base ou não. O conceito de conjuntos de vetores geradores nos ajudará a responder essa questão.
Teorema. Se 1 2{v , v , , v }nS = é um conjunto de vetores não nulos que geram um subespaço W de um espaço vetorial V , então algum subconjunto de S é uma base para W (que pode ser o próprio S).
Prova. Se S for um conjunto linearmente independente, então, por definição, S é uma base para W . Se S for linearmente dependen-te, então, no mínimo, um dos vetores pode ser escrito como uma combinação linear dos outros. Suponhamos que vn seja tal vetor (se não for o caso, role os vetores em S até que isto seja verdade).

165
Postulamos que 1 2 1' {v , v , , v }nS −= continua gerando W .
Para ver isto, seja um vetor x em W que escrevemos como:
1 1 2 2 1 1x v v v vn n n nc c c c− −= + + + +.
Agora, como 1 1 2 2 1 1v v v vn n nd d d − −= + + + (é o vetor que esta-mos supondo ser uma combinação linear dos outros), substituindo na expressão anterior e remanejando a equação, temos:
1 1 1 2 2 2 1 1x ( )v ( )v ( )n n n n nc c d c c d c c d− −= − + − + + − .
Logo, 'S gera W .
Se 'S é linearmente independente, 'S é uma base de W . Se 'S é linearmente dependente, um dos vetores de 'S é uma combinação linear dos outros.
Agora, podemos argumentar como antes e repetir o processo, eliminando vetores até encontrar fatalmente um conjunto linear-mente independente que gere W . (Se reduzirmos o conjunto a um único vetor, esse conjunto é linearmente independente, já que S foi definido como um conjunto de vetores não nulos). O conjunto resultante é uma base para W .
Então, temos um resultado fundamental:
Qualquer espaço vetorial finito gerado por um conjunto de vetores não nulos
possui uma base.
Exemplo 37. Seja V o conjunto de todos os polinômios munido com as operações usuais. O espaço vetorial gerado V não é finito. De fato, se tomamos qualquer subconjunto finito S de V , então haverá um termo de grau máximo, digamos pt , no conjunto. O polinômio 1pt + não está agora no espaço gerado S , e então S não pode gerar V .
Restringiremos o nosso estudo às bases de espaços vetoriais finitos.

166
No Exemplo 35, mostramos que qualquer conjunto de três ou mais vetores de 2
não pode ser uma base para 2 . Esses vetores
poderiam ser coplanares e formar um conjunto linearmente de-pendente. Um conjunto de apenas um vetor (três é demais, um é pouco) tampouco pode ser uma base para 2
, já que gera apenas uma reta através da origem. Podemos concluir, então, que qual-quer base para 2
deve conter exatamente dois vetores. Veja o seguinte teorema.
Teorema. Se 1 2{v , v , , v }nS = é uma base para V , então qualquer conjunto de 1n + (ou mais) vetores é linearmente dependente, e en-tão, não é uma base para V . Por outro lado, qualquer conjunto de
1n − (ou menos) vetores não é suficiente para gerar V , e então, não é uma base para V .
Prova. i) Seja 1 1 2 2 1 1{ w w w w }n n n nT c c c c + += + + + + , isto é, Tcontém exatamente 1n + vetores. Mostraremos que T não pode ser uma base, evidenciando que T é linearmente dependente. Para isso, consideremos
1 1 2 2 1 1w w w w 0 (1)n n n nc c c c + ++ + + + = (1)
Cada kw pode ser escrito como
1 1 2 2w v v vk k k nk na a a= + + +, 1,2, , 1k n= + ,
desde que S gera V . Substituindo cada w k na equação (1), temos:
1 1 1
1 1 1 1 1w v v 0
n n n n n
k k k jk j jk k jk k j j k
c c a a c+ + +
= = = = =
= = =
∑ ∑ ∑ ∑ ∑
Já que S é linearmente independente.1
10
n
jk kk
a c+
=
=∑ , 1, ,j n∀ =
Este é um sistema de equações homogêneo que tem menos equa-ções ( )n que incógnitas ( 1)n + ; de tal forma, existe uma solução distinta da trivial para 1 2 1, , , ,n nc c c c + . Isto significa que T é li-nearmente dependente.
Agora, suponhamos que T contenha mais que ( 1)n + vetores. Seja T um subconjunto de ( 1)n + vetores, que deve ser linear-mente dependente (como acabamos de mostrar). Como T T⊂ , o conjunto T contém um subconjunto linearmente dependente, e então deve ser linearmente dependente.

167
ii) Suponhamos agora que T contém 1n − vetores e gera V .
Então, por um teorema anterior, T deve possuir uma base para V . Se contém r vetores, devemos ter que 1r n≤ − . Já que é uma base e S tem 1r + ou mais vetores, devemos concluir, le-vando em consideração o item i, que S é linearmente dependente. Isto contradiz o fato que S é uma base.
Neste ponto, sabemos que um espaço vetorial finito gerado por um conjunto de vetores não nulos tem uma base e é de dimensão finita.
O teorema diz que o número de vetores em uma base é único. Se acharmos uma base S para V e S tiver sete vetores, então qualquer base deverá ter sete vetores. Podemos ter infinitas bases para V , porém cada uma delas terá apenas sete vetores. Este fato nos leva a definir a dimensão de um espaço vetorial como sendo o número de vetores que formam a base para V .
Definição. Se uma base S tem n vetores, a dimensão de V é n , e escrevemos dim( )V n= , e dizemos V é de dimensão finita. Em particular, V é chamado como um espaço vetorial n -dimensional quando a base para V tem n vetores.
A dimensão do espaço vetorial contendo o vetor zero, unicamen-te, está definida como sendo zero. Agora vamos aos exemplos. Estaremos interessados em determinar uma base e sua dimen-são para diferentes espaços vetoriais. Veja que o procedimento será repetido em cada caso: propor uma base (a partir de uma heurística) e testar geração e independência linear. Nos seguin-tes exemplos, mostram-se as bases canônicas de diferentes espa-ços vetoriais.
Exemplo 38. Mostre que n tem a base (canônica) 1 2{e ,e , ,e }n ,
onde
j-ésimacomponente
e 0, , 1 , ,0T
j
= .
Solução. Para testar geração, consideremos qualquer vetor
1 2x ( , , , )T nnx x x= ∈ e observemos que
1 1 2 2x e e en nx x x= + + + .

168
Para testar independência linear, consideremos a combina-ção linear nula 1 1 2 2e e e 0n nc c c+ + = . Logo, encontramos que
1 2 0nc c c= = = = . Assim, 1 2{e ,e , ,e }n é uma base para n ,
e dim( )n n= .
É natural associar a base canônica com alguns espaços que nos são familiares:
• 1 → → um objeto unidimensional
• 2 → → um objeto bidimensional
• 3 → → um objeto tridimensional
Comentário. Observando alguns dos exemplos anteriores, vemos que existem diversas bases possíveis para 2
. Em geral, para um espaço vetorial finito, não nulo, existe um número infinito de ba-ses. Entretanto, o número de elementos, em qualquer uma dessas bases, é sempre o mesmo, e lembre-se que este número é a dimen-são do espaço.
Exemplo 39. Mostre que 2 3M × tem dimensão 6.
Solução. A base canônica é
1 0 0 0 1 0 0 0 1 0 0 0 0 0 0 0 0 0, , , , ,
0 0 0 0 0 0 0 0 0 1 0 0 0 1 0 0 0 1S
=
Assim, ( )2 3dim 6M × = , igual ao número de vetores em S .
Exemplo 40. O espaço vetorial nP , polinômios de grau n , tem dimensão 1n + .
Solução. Uma base é {1, , , }nS x x= . Confiramos primeiro a in-dependência linear. A equação 0 1 11 0n
na a x a x−+ + + = se satis-faz somente se o polinômio do lado esquerdo for zero para todo número real x . E isto acontece somente se todos os coeficientes são nulos, isto é, somente se 1 2 0na a a= = = = . Logo, S é line-armente independente. Pode ser visto que S gera nP pelo fato de que qualquer polinômio em nP é da forma 0 1 11 n
na a x a x−+ + + .
Agora que sabemos o que é base de um espaço vetorial, iremos colocar o que se conhece como o segundo problema fundamental da álgebra linear.
.
169
O Problema das Bases
Seja V um espaço vetorial. O problema das bases (PB) pode ser colocado de duas maneiras:
Problema 1. Construir uma base para V , selecionando vetores de V .
Problema 2. Dado um conjunto S de vetores em V , construir uma base para V acrescentando ou eliminando alguns (mas não todos) vetores de S , ou algumas vezes ambas as coisas.
Antes de começar a resolver estes problemas, poderíamos nos per-guntar se há alguma garantia de que realmente exista resposta para eles. Lembre-se do Teorema da página 166, que nos diz: “jo-gue fora os vetores dependentes para obter um conjunto gerador e assim obter uma base”, o qual poderá nos ajudar nesse momento.
Exemplo 41. (Problema 2 do PB). Seja {(1,0,3) , (2,1, 4) }T TS = . Ache uma base T para 3
que contenha S .
Solução 1. Já que 3 tem dimensão 3, sabemos que T deve con-
ter exatamente três vetores. O conjunto S já é linearmente inde-pendente, assim, devemos acrescentar somente um vetor a este conjunto. O novo vetor que juntaremos aos do conjunto S deve ser tal que o conjunto T seja linearmente independente. Isto signi-fica que o novo vetor não deve pertencer ao espaço gerado pelos vetores que já estavam em S .
Então, primeiro determinamos o espaço gerado pelos vetores:
.
E agora o que devemos garantir é que o novo vetor não seja da forma ( 2 , ,3 4 )T + + .
Vejamos como fazer isto. Suponhamos que o nos-so novo vetor seja 1 2 3( , , )Tx x x x= , e forçamos a equação
1 2 3( 2 , ,3 4 ) ( , , )T Tx x x + + = para não ter solução para e . Isto nos leva, resolvendo esse sistema, a escolher x , de tal forma que 3 1 23 2 0x x x− + ≠ , para conseguirmos ter um ve-tor que não pertença [(1,0,3) , (2,1, 4) ]T T . Logo, (0,1,0)T fun-ciona (de fato, existem infinitas escolhas), e então o conjunto {(1,0,3) , (2,1, 4) , (0,1,0) }T T T é uma base para 3
.
Deixamos pra você conferir!

170
Solução 2. Se o terceiro vetor 1 2 3( , , )Tx x x x= fosse escolhido de tal forma que 1 2 3{(1,0,3) , (2,1, 4) , ( , , ) }T T Tx x x seja linearmente dependente, então:
1 2 3
1 0 32 1 4 0x x x
=
devido a uma das linhas ser uma combinação linear das outras. Como o nosso propósito é justamente o contrário, se requerermos que
1 2 3
1 0 32 1 4 0x x x
≠ ,
obtemos novamente 3 1 23 2 0x x x− + ≠ , que é a mesma condição obtida na Solução 1.
Solução 3. (Tentativa e erro)
Chutaremos como candidato ao terceiro vetor os vetores canônicos, até que algum deles funcione. Tentaremos inicialmente com e conferiremos a independência linear. Para isso, formamos a seguin-te combinação linear nula:
(1,0,3) (2,1,4) (1,0,0) (0,0,0)T T T T + + = ,
o que nos leva a resolver
1 2 1 0 1 2 1 00 1 0 0 0 1 0 03 4 0 0 0 0 1 0
→
.
Nossa primeira tentativa teve sucesso, os vetores são linearmente independentes e formam a base {(1,0,3) , (2,1, 4) , (1,0,0) }T T T .
Neste exemplo usamos implicitamente o seguinte teorema.
T eorema: Seja e um subconjunto de V. As seguintes afir-
mativas são equivalentes:
O conjunto 1) S é uma base para V,
Atenção: Tente você com outro vetor canônico!

171
O conjunto 2) S é linearmente independente,
O conjunto 3) S gera V.
Observe que, se tivéssemos disposto deste teorema, os exemplos anteriores teriam sido resolvidos com a metade do trabalho. Seria suficiente mostrar independência linear.
Exemplo 42. (Problema 1 do PB). Ache uma base para o espaço solução de:
1 2 3 4
2 3 4
1 2 3 4
2 00
3 4 2 5 0
x x x xx x x
x x x x
+ − + =+ − =
+ − + =
.
Solução: Resolvendo o sistema, temos que 3x = , 4x = , e então
.
Já que {(2, 1,0,1) ( 3,1,1,0) }T TS = − + − gera o espaço solução e é linearmente independente, S é uma base para o espaço solução.
Estes dois últimos exemplos mostram que resolver o PB não se-gue um procedimento padrão ou a utilização de uma fórmula. Requer habilidade, versatilidade e uma familiaridade com vários conceitos anteriores.
Exemplo 43. O conjunto span( ) [(1, 1,2) , (0,5, 8) , (3, 2, 2) , (8, 2,0) ]T T T TS = − − − é um espaço vetorial. Ache uma base para esse espaço.
Solução. Devemos eliminar os vetores que são combinação linear dos outros. Para descobrir essa dependência, consideremos a se-guinte combinação linear:
(1, 1, 2) (0,5, 8) (3,2, 2) (8,2,0) (0,0,0) (1)T T T T Ta b c d− + − + − + = (1)
Se escrevemos esse sistema em forma matricial e escalonamos por linhas, temos:
1 0 3 8 0 1 0 3 8 01 5 2 2 0 0 1 1 2 0
2 8 2 0 0 0 0 0 0 0
− → − −
.
Deixamos pra você conferir!

172
As soluções são , , 2 , 3 8d d c c b c d a c d= = = − − = − − . Temos duas variáveis livres.
Escolhendo 1d = , 0c = , temos (8, 2,0) 8(1, 1,2) 2(0,5, 8)T T T= − + − .
Escolhendo 0d = , 1c = , temos (3, 2, 2) 3(1, 1,2) (0,5, 8)T T T− = − + − . Logo, (8, 2,0)T e (3, 2, 2)T− dependem de (1, 1, 2)T− e (0,5, 8)T− , e então o span( ) [(1, 1,2) , (0,5, 8) ]T TS = − − . A dimensão de S é dois.
No exemplo anterior, as colunas da matriz aumentada que cor-respondem ao lado esquerdo da equação (1) são os vetores de S . Além disso, o número de linhas (duas) não nulas da forma esca-lonada é igual á dimensão do span( )S .
Em geral, para problemas em n , como no caso do exemplo 41,
contamos com a ajuda de um teorema. Observamos que, para uma matriz A , m n× , se considerarmos as linhas como vetores de n , então o espaço gerado por esses vetores é chamado o espa-
ço linha de A .
Teorema. Se 1 2{v , v , , v }nS = é um conjunto de vetores de n e A é a
matriz construída pondo 1v na linha 1, 2v na linha 2, e assim por diante; e se B é a matriz que resulta reduzindo A à forma escalonada por linhas, então as linhas não nulas de B formam uma base para o espaço linha de A . Isto é, as linhas não nulas de B formam uma base para span( )S .
Prova. Seja a matriz
1
2
T
T
Tn
vv
A
v
=
.
No processo de escalonar uma matriz por linhas, usamos as opera-ções elementares por linhas. Lembrando do procedimento para re-alizar essas operações, temos que, se forem obtidas linhas de zeros, essas linhas devem ser combinações lineares das outras linhas do conjunto. As linhas restantes (não nulas) resultam das combina-ções lineares dos vetores linearmente independentes do conjunto original. Então, o espaço gerado pelas linhas não nulas é o mesmo que o gerado por S . Assim, as linhas não nulas, sendo independen-tes, formam uma base para span( )S e dim(span( ))S número de linhas não nulas.

173
Exemplo 44. Resolver novamente o Exemplo 41 usando o teorema anterior.
Solução. Construimos A e a escalonamos por linhas,
1 1 21 1 280 5 8 0 15
3 2 2 0 0 08 2 0 0 0 0
− − − − → −
Pelo teorema, 8span( ) (1, 1,2) , 0,1,5
TTS
= − −
e dim(span( )) 2S = .
3.6.2 Mudança de Bases
Muitos problemas aplicados podem ser simplificados mudando-se de um sistema de coordenadas para outro. Mudar sistemas de coordenadas em um espaço vetorial é, essencialmente, a mesma coisa que mudar de base. Por exemplo, ao descrever o movimento de uma partícula no plano em um instante particular, é muitas vezes conveniente usar uma base de 2
formada por um vetor tangente unitário T e um vetor normal unitário N, em vez da base canônica 1 2{e ,e } .
Nesta seção, vamos discutir o problema de mudar de um sistema de coordenadas para outro.
Vamos mostrar que isso pode ser feito multiplicando-se um vetor de coordenadas dado x por uma matriz inversível S .
O produto y xS= vai ser o vetor de coordenadas para o novo sis-tema.
3.6.3 Mudanças de Coordenadas em 2
A base canônica para 2 é 1 2[e ,e ] . Qualquer vetor x em 2
pode ser escrito como uma combinação linear dessa base
1 2 1 1 2 2x ( , ) e eTx x x x= = + .
Os escalares 1x e 2x são as coordenadas de x em relação à base canônica. De fato, para qualquer base 1 2{u ,u } para 2
, um dado

174
vetor x pode ser representado de maneira única como uma com-binação linear 1 1 2 2u ux = + .
Os escalares 1 , 2 são as coordenadas de x em relação à base
1 2{u ,u }. Vamos ordenar os elementos da base, de modo que 1u seja o primeiro vetor da base e 2u seja o segundo, e vamos de-notar a base ordenada por 1 2[u , u ] . Podemos, então, nos referir ao vetor 1 2( , )T como sendo o vetor de coordenadas de x em relação à base 1 2{u ,u } .
Exemplo 45. Sejam 1u (2,1)T= e 1u (1,4)T= . Os vetores são line-amente independentes, e portanto, formam uma base para 2
. O vetor x (7,7)T= pode se escrito como uma combinação linear
1 2x 3u u= + .
Logo, o vetor de coordenadas de x em relação a [u1, u2] é (3,1)T .
Geometricamente, esse vetor no diz como sair da origem e chegar ao ponto (7,7) , movendo-nos primeiro na direção de 1u , e depois na direção de 2u .
O vetor de coordenadas de x em relação à base ordenada 1 2[u , u ] é (1,3)T . Geometricamente, esse vetor nos diz como sair da ori-gem e chegar a (7,7) , movendo-nos primeiro na direção de 2u , e depois na direção de 1u .
Figura 3.9 - Combinação linear

175
Uma vez decididos a trabalhar com uma nova base, temos o pro-blema de encontrar as coordenadas em relação a essa nova base. Por exemplo, em vez de usarmos a base canônica para o 2
, usar-mos uma base diferente,
1
3u
2
=
, 2
1u
1
=
.
De fato, podemos mudar nos dois sentidos entre os dois sistemas de coordenadas. Vamos considerar os dois problemas seguintes:
Dada um vetor 1) 1 2x ( , )Tx x= , encontre suas coordenas em re-lação a 1u e 2u .
Dado um vetor 2) 1 1 2 2x u u = + , encontre suas coordenadas em relação a 1e e 2e .
Vamos resolver o item 2 primeiro (mais fácil). Para mudar da base
1 2[u , u ] para a base 1 2[e ,e ], precisamos expressar os elementos da base antiga, 1u e 2u , em termos dos elementos da nova base, 1e e 2e .
1 1 2
2 1 2
u 3e 2eu e e= += +
Temos, então, que
1 1 2 2 1 1 1 2 2 1 2 2
1 2 1 1 2 2
u u (3 e 2 e ) ( e e )(3 )e (2 )e
+ = + + += + + +
.
Logo, o vetor de coordenadas de 1 1 2 2u u + em relação a 1 2[e ,e ] é
1 2 1
1 2 2
3 3 12 2 1
x
+ = = +
, definindo ( )1 2
3 1u ,u
2 1U = =
.
Temos que, dado qualquer vetor de coordenadas 1 2( , )T = em relação a 1 2[u , u ] , para encontrar o vetor de coordenadas x corres-pondentes em relação a 1 2[e ,e ] , basta multiplicar U e .
x (1)U= (1)
A matriz U é chamada de matriz de mudança de base de 1 2[u , u ] para 1 2[e ,e ] .
Para resolver o problema 1, precisamos encontrar a matriz de mu-dança de base de 1 2[e ,e ] para 1 2[u , u ] . A matriz U é inversível, já que suas colunas são vetores linearmente independentes.

176
Da equação (1), temos que: 1xU −= .
Logo, dado um vetor: 1 2 1 1 2 2x ( , ) e eTx x x x= = + , basta multiplicá-lo por 1U − para encontrar seu vetor de coordenadas em relação a 1 2[u , u ] . 1U − é a matriz de mudança de base de 1 2[e ,e ] para
1 2[u , u ] .
Exemplo 46. Sejam 1
3u
2
=
, 2
1u
1
e 7
x4
=
. Encontre as coor-
denadas de x em relação a 1 2[u , u ] .
Solução. Pela discussão precedente, a matriz de mudança de base
de 1 2[e ,e ] para 1 2[u , u ] é a inversa de 1 2
3 1(u , u )
2 1U = =
.
Logo, 1 1 1 7 3x
2 3 4 2U − − −
= = = − .
O vetor de coordenadas desejado é 1 2x 3u 2u= − .
Exemplo 47. Seja 1b (1, 1)T= − e 1b ( 2,3)T= − . Encontre a matriz de mudança de base de 1 2[e ,e ] para 1 2[b , b ] e determine as coordena-das de x (1,2)T= em relação a 1 2[b , b ] .
Solução. A matriz de mudança de base de 1 2[b , b ] para 1 2[e ,e ] é
( )1 2
1 2b , b
1 3B
− = = −
.
Logo, a matriz de mudança de base de 1 2[e ,e ] para 1 2[b , b ] é
1 3 21 1
B− =
.
O vetor de coordenadas de x em relação a 1 2[b , b ] é
1 3 2 1 7x=
1 1 2 3B −
= =
.
E, portanto, 1 2x 7b 3b= + .
Se 11 12
21 22
=
s sS
s s é a matriz de mudança de base de uma base
ordenada 1 2[v , v ] em 2 para outra base ordenada 1 2[u , u ] , en-
tão 1 1 2v 1v 0v= + . O vetor de coordenadas de 1v em relação a
1 2[u , u ] é dado por 11 12 111
21 22 21
1s
0s s ss s s
= =
.

177
Analogamente, para 2v , 2 1 2v 0v 1v= + .
E seu vetor de coordenadas em relação a 1 2[u , u ] é dado por
11 12 122
21 22 22
0s
1s s ss s s
= =
.
Logo,
1 11 1 21 2
2 12 1 22 2
v u(1)
v us s us s u
= += +
(1)
Em geral, se os elementos da base antiga 1v e 2v são escritos em termos da nova base 1 2[u , u ] , o vetor de coordenadas 1 11 21s ( , )Ts s= correspondente a 1v é a primeira coluna da matriz mudança de base S e o vetor de coordenadas 2 12 22s ( , )Ts s= correspondente a 2v é a segunda coluna de S . Logo, S é a transposta da matriz de coeficientes em (1).
Exemplo 48. Encontre a matriz de mudança de base de 1 2[v , v ] para 1 2[u , u ] , onde
1
5v
2
=
, 2
7v
3
=
, 1
3u
2
=
, 2
1u
1
=
.
Solução. Precisamos escrever 1v e 2v em termos dos elementos da nova base 1u e 2u ,
1 11 1 21 2
2 12 1 22 2
v u uv u u
s ss s
= += +
.
A primeira equação pode ser escrita como 11 21
11 21
3522s ss s+
= + .
A solução desse sistema é 11 21( , ) (3, 4)T Ts s = − . Analogamente, a
segunda equação nos leva ao sistema 12 22
12 22
3723s ss s
+ = +
, cuja so-lução é 12 22( , ) (4, 5)T Ts s = − .
Portanto, 3 44 5
S = − −
é a matriz de mudança de base de 1 2[v , v ] para 1 2[u , u ] .
Um método alternativo para mudar de uma base 1 2[v , v ] para outra base 1 2[u , u ] é mudar primeiro de 1 2[v , v ] para a base ca-nônica 1 2[e ,e ] e depois mudar para 1 2[u , u ] .

178
Dado um vetor x em 2 , se c é o vetor de coordenadas de x em
relação a 1 2[v , v ] e d é o vetor de coordenadas de x em relação a
1 2[u , u ] , então
1 1 2 2 1 1 2 2 1 1 2 2v v e e u uc c x x d d+ = + = + .
Como V é a matriz de mudança de base de 1 2[v , v ] para 1 2[e ,e ] e 1−U é a matriz mudança de base de 1 2[e ,e ] para 1 2[u , u ] , tem-se
que c xV = e 1x dU − = .
E, portanto, 1 1c xU V U d− −= = .
Logo , 1U V− é a matriz mudança de base de 1 2[v , v ] para 1 2[u , u ] .
Figura 3.10 - Mudança de base
Exemplo 49. Sejam 1 2[v , v ] e 1 2[u , u ] as bases ordenadas do exem-plo anterior. A matriz de mudança de base de 1 2[v , v ] para 1 2[u , u ] é dada por:
1 1 1 5 7 3 42 3 2 3 4 5
U V− − = = − − −
.
3.6.4 Mudança de Base em um Espaço Vetorial Geral
Tudo que fizemos até agora pode ser generalizado facilmente para qualquer espaço vetorial de dimensão finita. Vamos come-çar definindo vetores de coordenadas em um espaço vetorial de dimensão n .
Definição. Seja V um espaço vetorial com base ordenada
1 2[v , v , , v ]nE = . Se v é um elemento qualquer de V , então v pode ser escrito na forma 1 1 2 2v v v vn nc c c= + + + , na qual
1 2, , , nc c c são escalares. Podemos associar, então, a cada vetor v

179
um único vetor 1 2c ( , , , )Tnc c c= em n
. O vetor c , assim defini-do, é chamado de vetor de coordenadas de v em relação à base ordenada E e é denotado por [v]E. Os ic são as coordenadas de v em relação a E.
Os exemplos considerados até agora trataram apenas de mudan-ças de coordenadas em 2
. Técnicas análogas podem ser usadas em n
, cujas matrizes de mudança de base serão n n× .
Exemplo 50. Sejam
1 2 3
1 2 3
[v , v , v ] [(1,1,1) , (2,3, 2) , (1,3, 4) ]
[u ,u ,u ] [(1,1,0) , (1, 2,0) , (1, 2,1) ]
T T T
T T T
EF= =
= =.
Encontre a matriz de mudança de base de E para F . Sejam
1 2 3x 3v 2v v= + − e 1 2 3y v 3v 2v= − + ou 3
[x] 21
E
= −
e 1
[y] 32
E
= −
.
Determine as coordenadas de x e y em relação à base ordenada F .
Solução. Como no último exemplo, a matriz mudança de base é dada por:
1
2 1 0 1 2 1 1 1 3 1 1 1 1 3 5 1 1 0
0 0 1 1 2 4 0 0 4U V−
− − = − − = − −
.
Os vetores de coordenadas de x e y em relação à base ordenada F são dados por:
1 1 3 3 8[x] 1 1 0 2 5
0 0 1 1 3F
− = − − = − −
e
1 1 3 1 8[y] 1 1 0 3 2
0 0 1 2 3F
− − = − − − =
.
O leitor pode verificar que
1 2 3 1 2 3
1 2 3 1 2 3
8u 5u 3u 3v 2v v8u 2u 3u v 3v 2v
− + = + −− + + = − +
.

180
Exemplo 51. Suponha que queremos mudar, em 2P , da base orde-nada 2[1, , ]x x para a base ordenada 2[1, 2 , 4 2]x x − .
Solução. Como 2[1, , ]x x é a base canônica para 2P , é mais fá-cil encontrar a matriz mudança de base de 2[1, 2 , 4 2]x x − para
2[1, , ]x x .
Como2
2
2 2
1 1 (1) 0 ( ) 0 ( )2 0 (1) 2 ( ) 0 ( )
4 2 2 (1) 0 ( ) 4 ( )
x xx x x
x x x
= ⋅ + ⋅ + ⋅
= ⋅ + ⋅ + ⋅
− = − ⋅ + ⋅ + ⋅
,
a matriz mudança de base é1 0 20 2 00 0 4
S−
=
.
A inversa de S vai ser a matriz que muda da base 2[1, , ]x x para a base 2[1, 2 , 4 2]x x − ,
1
1 0 1 20 1 2 00 0 1 4
S −
=
.
Dado qualquer ( ) 2p x ax bx c= + + em 2P , para encontrar as co-ordenadas de ( )p x em relação a 2[1, 2 , 4 2]x x − , basta multiplicar
1 0 1 2 20 1 2 0 20 0 1 4 4
a a cb bc c
+ =
.
Logo, 2( ) ( 4) ( ) ( 2) ( ) ( 2) (1)p x c x b x a c= ⋅ + ⋅ + + ⋅ . Vimos que a matriz de mudança de base é inversível. De fato, podemos pensar em qualquer matriz inversível como uma matriz de mudança de base.
Em muitos problemas de aplicação, é importante usar o tipo certo de base para o caso em questão. Veremos, em Álgebra Linear II, que a chave para a resolução de quadrados mínimos é usar um tipo especial de base: a base ortonormal. Também vamos consi-derar um número de aplicações envolvendo autosistemas (autova-lores e autovetores) associados a uma matriz n n× . A chave para resolver esse tipo de problema é mudar para uma base para n
, formada pelos autovetores da matriz.

181
3.7 Subespaços Associados a Matrizes eComputação de Bases
Formalizaremos alguns dos conceitos colocados em seções an-teriores, acrescentando outros subespaços associados com uma matriz.
Definição. Seja A uma matriz m n× .
O 1) espaço nulo de A , nul( )A é o subespaço de n que con-
siste nas soluções do sistema linear homogêneo x 0A = .
O 2) espaço linha de A , lin( )A é o subespaço de n gerado
pelas linhas de A .
O 3) espaço coluna de A , col( )A é o subespaço de m gerado
pelas colunas de A .
3.7.1 Uma Base para o Espaço Nulo
Exemplo 52. O espaço nulo da matriz
1 3 2 0 11 1 1 1 0
0 4 2 4 31 3 2 2 0
A
− − − =
−
está formado por todas as soluções do sistema homogêneo x 0A = . Reduzindo esta matriz a sua forma escalonada por linhas, temos:
1 0 1 2 0 1 40 1 1 2 0 1 40 0 0 1 1 20 0 0 0 0
−
.
Daqui, fica fácil derivar as soluções do sistema homogêneo:
1 3 5
2 3 5
3
4 5
5
(1 2) (1 4)(1 2) (1 4)
é qualquer um(1 2)
é qualquer um
x x xx x xxx xx
= − −= − −
= −

182
Logo, ( )nul A consiste de vetores da forma:
3 5
13 5
2
3 3 5 3 53
45
5
5
112 4 42
112 4 42 u+x v01
102 2
0 1
x x
xx xx
x x x x xxx xx
x
− − − − − − − − = = = + = − −
.
Já que 3x e 5x são arbitrários, temos que nul( ) {u, v}A span= . Além disso, os seguintes argumentos mostram que u e v são linear-mente independentes. Para ter 3 5u x v 0x + = , a terceira e a quinta coordenadas devem ser nulas, isto é, 3 5 0x x= = . Em conseqüên-cia, u e v formam uma base de nul( )A .
O que temos feito neste exemplo se aplica ao caso mais geral. Po-demos esboçar um procedimento para achar a base do espaço nulo.
Definição. Chamamos a nulidade de A a dimensão do espaço nulo de A , isto é, nulidade de dim(nul( ))A A= .
Para o exemplo anterior, a dim(nul( )) 2A = .
Se a solução geral de x 0A = é 1 1 2 2v v vk kx c c c= + + + , onde
1 2, , , kc c c são as variáveis livres, temos que 1 2v , v , , vk formam uma base para nul( )A .
As bases dos núcleos das transformações lineares podem ser achadas de uma maneira similar a nulidade. Isto é um assunto a ser tratado no próximo capítulo.
3.7.2 Uma Base para o Espaço Linha
A partir do seguinte teorema, teremos um procedimento padrão para determinar a base do espaço linha de uma matriz.
Teorema. Duas matrizes equivalentes por linhas têm o mesmo es-paço linha.
183
Logo, a forma escalonada por linhas de uma matriz fornece-nos o espaço linha.
Do exemplo anterior, temos que a forma escalonada por linhas:
1 0 1 2 0 1 40 1 1 2 0 1 40 0 0 1 1 20 0 0 0 0
−
.
Logo, como os vetores linha (não nulos) são linearmente indepen-dentes, formam uma base e
1 0 00 1 0
lin( ) span , ,1 2 1 2 00 0 11 4 1 4 1 2
A
= −
.
Definição. O posto de uma matriz A , posto( )A , é a dimensão de seu espaço linha.
No exemplo anterior, temos que dim(lin( )) posto( ) 3A A= = .
3.7.3 Uma Base para o Espaço Coluna
Exemplo 53. O espaço coluna da matriz
1 3 2 0 11 1 1 1 0
0 4 2 4 31 3 2 2 0
A
− − − =
−
é gerado pelos cinco vetores coluna. Levando à forma escalonada por linhas, temos:
1 3 2 0 10 2 1 1 00 0 0 2 10 0 0 0 0
A
− =
.
Já que [col 3] e [col 5] não têm pivô, a [col 5] é uma combinação linear de [col 1] e [col 4], e a [col 3] é a uma combinação linear de [col 1] e [col 2], temos que o espaço coluna de A:

184
Col[A] = span{[col 1], [col 2], [col 3], [col 4], [col 5]}= span{[col 1], [col 2], [col 3], [col 4]}= span{[col 1], [col 2], [col 4]}.
Por outro lado, se mantemos apenas [col 1], [col 2], [col 4], então
1 3 01 1 1
0 4 41 3 2
− −
−
,
cuja forma escalonada é1 3 00 2 10 0 20 0 0
−
,
onde todas as colunas possuem pivô. Então, já que essas três colunas são linearmente independentes e geram col( )A , concluímos que
1 3 01 1 1
col( ) span , ,0 4 41 3 2
A
− − = −
.
O que temos neste exemplo pode ser aplicado a qualquer matriz.
As colunas sem pivô são combinação linear das colunas que 1) a precedem. Assim, elas podem ser eliminadas sem afetar o espaço coluna.
As colunas com pivô são linearmente independentes.2)
E nos conduz a um procedimento padrão para determinar uma base para o espaço coluna. Para uma matriz A, as colunas pivôs de A formam uma base de col( )A .
Frisamos que são as colunas de A , e não as colunas da forma escalonada por linhas, que formam a base.
Teorema. Seja A uma matriz m n× , então a dimensão do espaço linha é igual à dimensão do espaço coluna.
Veja como este teorema se aplica no exemplo anterior, comparando as dimensões dos espaços envolvidos.

185
3.8 Espaços Linha/Coluna e osSistemas Lineares
Os conceitos de espaço linha e espaço coluna são úteis no estudo de sistemas lineares. O sistema x bA = pode se escrito na forma
11 1 12 2 1 11 12 11
21 1 22 2 2 21 22 211 2
1 1 2 2 1 2 1
1
21 1 2 2
x b
a a a
n n
n nn
m m mn n m m m
n n
m
a x a x a x a a aa x a x a x a a a
A x x x
a x a x a x a a a
bb
x x x
b
+ + + + + + = = + + +
+ + + = + + + =
11 1 12 2 1 11 12 11
21 1 22 2 2 21 22 211 2
1 1 2 2 1 2 1
1
21 1 2 2
x b
a a a
n n
n nn
m m mn n m m m
n n
m
a x a x a x a a aa x a x a x a a a
A x x x
a x a x a x a a a
bb
x x x
b
+ + + + + + = = + + +
+ + + = + + + =
Segue-se que o sistema x bA = é compatível se, e somente se, b pode ser escrito como uma combinação linear dos vetores colu-nas de A . Temos, então, as seguintes caracterizaçações de siste-mas compatíveis:
x bA =• é compatível se, e somente se, b pertence ao espa-ço coluna de A.
Fazendo b 0= , temos que x 0A = , então temos:
O sistema • x 0A = tem apenas a solução trivial x 0= se, e somente se, os vetores colunas de A são linearmente in-dependentes.
Podemos inferir que, para uma matriz n n× :
Uma matriz A é inversível se, e somente se, os vetores co-•lunas de A formam uma base para n
.
Se A é uma matriz m n× , então a soma do posto de A com a nu-lidade de A é igual a n .
posto( ) dim(nul( ))A A n+ = .

186
3.9 Mais Exemplos sobre Computação de Bases
Exemplo 54. Queremos achar uma base do conjunto
1 1 2 1 4 2 3 3span , , , (1)
1 1 1 3 2 1 3 2H
− − = − −
(1)
Considere uma aplicação que leva matrizes 2 2× em vetores de 4
, da seguinte forma:a
a b bc d c
d
→
.
Observação. Pense em uma aplicação que transforme uma ma-triz em um vetor.
Temos 1 2 4 3
1 1 1 2 1 1 4 2 2 3 3 3, , ,
1 1 1 1 3 1 2 1 2 3 2 31 3 1 2
− − − − → → → → − − − −
Com esses vetores, construímos uma matriz e, como no caso an-terior, o nosso problema consiste em determinar uma base do es-paço coluna de
1 2 4 31 1 2 3
(2)1 1 2 31 3 1 2
− − − −
(2)
cuja forma escalonada é
1 2 4 30 1 2 00 0 5 10 0 0 0
.
As três primeiras colunas da matriz (2) formam uma base do espaço coluna e, então, as primeiras três matrizes 2 2× de (1)
1 1 2 1 4 2, ,
1 1 1 3 2 1 − − −
formam uma base de span( )H .
O conceito de aplicação linear será estudado com detalhe no próximo capítulo.
.

187
Exemplo 55. Gostaríamos de achar uma base para
2 2{[1 , 2 , 2 ]}T t t t t t= + + + .
Novamente, usaremos uma técnica análoga à utilizada no exem-plo anterior, que consiste em converter cada um destes vetores (po-linômios) em vetores de 3
pela aplicação 2[ ] ( , , )a bt ct a b c+ + = , e outra vez o problema se converte em determinar o espaço coluna de uma matriz.
Temos que 2
1 01 1 , 2 1
0 2t t t
+ → + →
e então a matriz procurada é
1 0 01 1 10 2 2
.
Utilizando operações elementares por linha, obtemos 1 0 01 1 10 0 0
.
As duas primeiras colunas formam uma base para o espaço colu-na. Correspondentemente 1 t+ e 22t t+ formam uma base para T .
Exemplo 56. O espaço coluna de
1 3 2 0 11 1 1 1 0
0 4 2 4 31 3 2 2 0
A
− − − =
−
é gerado pelos cinco vetores coluna. Os cinco vetores geradores podem ser simplificados utilizando as operações elementares por coluna para produzir a forma escalonada por colunas:
1 0 0 0 01 1 0 0 0
0 2 1 0 01 0 1 0 0
B
− =
−
Já que as colunas nulas não contribuem para gerar o espaço, temos: col( ) col(B) span(primeiras três colunas de )A B= = .
Além disso, as três primeiras colunas de B são linearmente inde-pendentes. Logo, as colunas não nulas de B são:
Estudaremos um método alternativo para determinar outra base, a
base do espaço coluna.

188
[col 1] de (1, 1,0,1)B = −
[col 2] de (0,1,2,0)B =
[col 3] de (0,0,1, 1)B = −
e formam uma base de col( )A . Agora col( ) col( )B A= .
O que temos feito pode ser aplicado a qualquer matriz A . Em resumo, temos:
Se 1) B é a forma escalonada de A , então col( ) col( )B A= .
As colunas não nulas de 2) B são linearmente independentes e geram col( )B .
Para uma matriz A , as colunas não nulas da forma escalonada por colunas formam uma base para col( )A .
Sugestão. Refaça os exemplos 55 e 56 utilizando esta técnica.
Exercícios PropostosSeção 1 - Espaços Vetoriais
1) Considere os vetores 1x (8,6)T= e 2x (4, 1)T= − em 2 .
a) Encontre o comprimento de cada vetor.
b) Seja 3 1 2x x x= + . Determine o comprimento de 3x . Qual a relação entre seu comprimento e a soma dos comprimen-tos de 1x e 2x ?
c) Desenhe um gráfico ilustrando como 3x pode ser construí-do geometricamente usando 1x e 2x . Use esse gráfico para dar uma interpretação geométrica da sua resposta em (b).
2) Repita o exercício 1 para os vetores 1x (2,1)T= e 2x (6,3)T= .
3) Seja C o conjunto dos números complexos. Defina a soma em C por ( ) ( ) ( ) ( )a bi c di a c b d i+ + + = + + + e defina a multiplicação por um escalar por ( )a bi a bi + = + , para todos os números
Atenção: frisamos que são as colunas da forma escalonada por colunas as que determinam esta base, e não as colunas de A.
189
reais . Mostre que C é um espaço vetorial em relação a essas operações.
4) Mostre que m n× , com as operações usuais de soma e multi-
plicação por um escalar, satisfaz os oito axiomas de espaços ve-toriais.
5) Mostre que [ , ]C a b , com as operações usuais de soma e mul-tiplicação por um escalar, satisfaz os oito axiomas de espaços ve-toriais.
6) Seja P o conjunto de todos os polinômios. Mostre que P , com as operações usuais de soma e multiplicação por um escalar para funções, forma um espaço vetorial.
7) Sejam x , y e z vetores de um espaço vetorial V . Mostre que, se x y x z+ = + , então y x= .
8) Seja S o conjunto de todos os pares ordenados de números reais. Defina a multiplicação por um escalar e a soma em S por
1 2 1 2
1 2 1 2 1 1
( , ) ( , )( , ) ( , ) ( ,0)
x x x xx x y y x y
=⊕ = +
,
usando o símbolo ⊕ para denotar a soma nesse sistema, para evitar confusão com a soma usual de x y+ de vetores linhas. Mostre que S , junto com a multiplicação usual por um escalar e a operação ⊕ , não é um espaço vetorial. Quais dos oito axiomas não são válidos?
9) Seja V o conjunto de todos os pares ordenados de números reais com a soma definida por 1 2 1 2 1 1 2 2( , ) ( , ) ( , )x x y y x y x y+ = + + e a multiplicação por um escalar definida por 1 2 1 2( , ) ( , )x x x x = . Como a multiplicação por um escalar é definida de maneira dife-rente da usual, usamos um símbolo diferente para evitar confu-são com a multiplicação usual de um vetor linha por um escalar. V é um espaço vetorial em relação a essas operações? Justifique sua resposta.

190
10) Denote por + o conjunto dos números reais positivos.
Defina a operação de multiplicação por um escalar por x x = para cada x +∈ e para cada número real . Defina a operação de soma por x y x y⊕ = ⋅ para todos ,x y +∈ .
Então, para esse sistema, o produto do escalar 3− por 12
é dado por 31 13 8
2 2
− − = =
e a soma de 2 com 5 é dada por 2 5 2 5 10⊕ = ⋅ = .
+ é um espaço vetorial em relação a essas operações? Justifique sua resposta.
11) Seja o conjunto de todos os números reais. Defina a mul-tiplicação por um escalar por x x = ⋅ (a multiplicação usual de números reais) e a soma, denotada por ⊕ , por max( , )x y x y⊕ = (o máximo entre dois números). é um espaço vetorial em rela-ção a essas operações? Justifique sua resposta.
Seção 2 - Subespaços
1) Determine se cada conjunto a seguir é ou não um subespaço de 2 .
a) 1 2 1 2{( , ) / 0}Tx x x x+ =
b) 1 2 1 2{( , ) / 0}Tx x x x⋅ =
c) 1 2 1 2{( , ) / 3 }Tx x x x=
d) 1 2 1 2{( , ) / 3 1}Tx x x x= +
2) Determine se cada conjunto a seguir é ou não um subespaço de 3 .
a) 1 2 3 1 3{( , , ) / 1}Tx x x x x+ =
b) 1 2 3 1 2 3{( , , ) / }Tx x x x x x= =
c) 1 2 3 3 1 2{( , , ) / }Tx x x x x x= +
d) 2 21 2 3 3 1 2{( , , ) / }Tx x x x x x= +
3) Determine se cada conjunto a seguir é ou não um subespaço de 2 2× .

191
a) O conjunto de todas as matrizes diagonais 2 2× .
b) O conjunto de todas as matrizes triangulares inferiores a 2 2× .
c) O conjunto de todas as matrizes 2 2× , tais que 12 1a = .
d) O conjunto de todas as matrizes 2 2× , tais que 11 0b = .
e) O conjunto de todas as matrizes simétricas 2 2× .
f) O conjunto de todas as matrizes singulares 2 2× .
4) Determine o núcleo de cada uma das matrizes a seguir.
a) 2 13 2
c) 1 3 42 1 11 3 4
− − − − −
b) 1 2 3 12 4 6 3
− − − −
d) 1 1 1 22 2 3 11 1 0 5
− − − − −
5) Determine se cada conjunto a seguir é ou não um subespaço de P4 . (Cuidado!)
a) O conjunto dos polinômios em 4P de grau par.
b) O conjunto dos polinômios de grau 3.
c) O conjunto dos polinômios ( )p x em 4P , tais que (0) 0p = .
d) O conjunto dos polinômios em 4P que tem pelo menos uma raiz real.
6) Determine se cada conjunto a seguir é ou não um subespaço de [ 1,1]C − .
a) O conjunto das funções f em [ 1,1]C − , tais ( 1) (1)f f− = .
b) O conjunto das funções ímpares em [ 1,1]C − .
c) O conjunto das funções não decrescentes em [ 1,1]− .
d) O conjunto das funções em f em [ 1,1]C − , tais ( 1) 0f − = e (1) 0f = .

192
e) O conjunto das funções f em [ 1,1]C − , tais ( 1) 0f − = ou (1) 0f = .
7) Determine se cada conjunto a seguir é ou não um conjunto gerador para 2
.
a) 2 3
,1 2
d) 1 1 2
, ,2 2 4
− − −
b) 2 4
,3 6
e) 1 1
,2 1
−
c) 2 1 2
, ,1 3 4
−
8) Quais dos conjuntos a seguir são ou não conjuntos geradores para 3
? Justifique suas respostas.
a) {(1,0,0) , (0,1,1) , (1,0,1) }T T T
b) {(1,0,0) , (0,1,1) , (1,0,1) , (1, 2,3) }T T T T
c) {(2,1, 2) , (3, 2, 2) , (2, 2,0) }T T T− −
d) {(2 , 1 , -2)T, (-2 , -1 , 2 )T, (4 , 2 , -4)T}
e) {(1,1,3) , (0, 2,1) }T T
9) Sejam 1
123
x− =
, 2
342
x =
, 266
x =
, 92
5y
− = −
.
a) 1 2[{ , }]x x x∈ ?
b) 1 2[{ , }]y x x∈ ?
10) Quais dos conjuntos a seguir são conjuntos geradores para
3P ? Justifique suas respostas.
a) 2 2{1, , 2}x x −
b) 2{2, , 2 3}x x +
c) 2{ 2, 1, 1}x x x+ + −
d) 2{ 2 , 1}x x x+ −

193
11) Em 2 2× , sejam
11 12
21 22
1 0 0 10 0 0 0
0 0 0 01 0 0 1
E E
E E
= =
= =
11 12
21 22
1 0 0 10 0 0 0
0 0 0 01 0 0 1
E E
E E
= =
= =
Mostre que 11 12 21 22, , ,E E E E geram 2 2× .
12) Seja S o espaço vetorial das seqüências infinitas definido no exercício 15 da seção 1. Seja 0S o conjunto das seqüências { }na , tais que 0na → quando n →∞ . Mostre que 0S é um subespaço de S .
13) Prove que, se S é um subespaço de 1 , então {0}S = ou
1S = .
14) Seja A uma matriz n n× . prove que as seguintes afirmações são equivalentes:
a) N( ) {0}A = .
b) A é inversível.
c) Para cada nb∈ , o sistema xA b= tem uma única solução.
Seção 3 - Independência Linear
1) Determine se os vetores dados são ou não linearmente inde-pendentes em 2
.
a) 2 3
,1 2
b) 2 4
,3 6
c) 2 1 2
, ,1 3 4−
d) 1 1 2
, ,2 2 4− − −
e) 1 1
,2 1
−
2) Determine se os vetores são ou não linearmente independen-tes em 3
.

194
a) 1 0 10 , 1 , 00 1 1
d) 2 2 41 , 1 , 22 2 4
− − − −
b) 1 0 1 10 , 1 , 0 , 20 1 1 3
e) 1 01 , 23 1
c) 2 3 41 , 2 , 22 2 4
− − −
3) Descreva geometricamente o espaço gerado por cada um dos seguintes vetores no exercício 2.
4) Determine se os vetores dados são ou não linearmente inde-pendente em 2 2×
.
a) 1 0 0 1
,1 1 0 0
b) 1 0 0 1 0 0
, ,0 1 0 0 0 1
c) 1 0 0 1 2 3
, ,0 1 0 0 0 2
5) Determine se os vetores dados são ou não linearmente inde-pendentes em 3P .
a) 2 21, , 2x x − c) 22, 1, 1x x x+ + −
b) 22, , , 2 3x x x + d) 22, 1x x+ −
6) Dados os vetores (funções) 2x e x , mostre que:
a) esses dois vetores são linearmente independentes em C [ -1,1];
b) esses dois vetores são linearmente independentes em C [ 0,1].

195
Seção 4 - Base e Dimensão
1) Indique se os vetores dados no Exercício 1 da seção 3 formam ou não base para 2
.
2) Indique se os vetores dados no Exercício 2 da seção 3 formam ou não uma base para 3
.
3) Considere os vetores 1
21
x =
, 2
43
x =
, 3
73
x = −
a) Mostre que 1x e 2x formam uma base para 2 .
b) Por que 1x , 2x , 3x têm que ser linearmente dependente?
c) Qual a dimensão de 1 2 3[{ , , }]x x x ?
4) Considere os vetores 1
32
4x
= −
, 2
324
x− =
, 3
648
x− = −
. Qual a dimensão de 1 2 3[{ , , }]x x x ?
5) Considere 1
213
x =
, 2
31
4x
= −
, 3
264
x =
a) Mostre que 1x , 2x , 3x são linearmente dependentes.
b) Mostre que 1x , 2x são linearmente independentes.
c) Qual a dimensão de 1 2 3[{ , , }]x x x ?
d) Descreva geometricamente 1 2 3[{ , , }]x x x .
6) Alguns dos conjuntos do exercício 2 da seção 2 formam su-bespaços de 3
. Em cada um desses casos, encontre uma base para o subespaço e determine sua dimensão.
7) Encontre uma base para o subespaço S de 4 formado por
todos os vetores da forma ( , 2 , , )Ta b a b c b c+ − + , onde a , b , c são números reais. Qual a dimensão de S ?
8) Considere os vetores 1 (1,1,1)Tx = e 2 (3, 1, 4)Tx = − .

196
a) 1x e 2x geram 3 ? Explique.
b) Seja 3x um terceiro vetor em 3 . Defina 1 2 3{ , , }X x x x= .
Que condição (ou condições) X tem que satisfazer para que 1x , 2x , 3x formem uma base para 3
?
c) Encontre um terceiro vetor 3x que estenda o conjunto
1 2{ , }x x a uma base para 3 .
9) Os vetores 1
122
x =
, 2
254
x =
, 3
132
x =
, 4
274
x =
, 5
110
x =
ge-ram 3
.
Retire algum (ou alguns) elemento de 1 2 3 4 5{ , , , , }x x x x x de modo a obter uma base para 3
.
10) Seja S o subespaço de 3P formado por todos os polinômios da forma 2 2 3ax bx a b+ + + . Encontre uma base para S .
11) Alguns dos conjuntos do exercício 3 da seção 2 formavam subespaços de 2 2×
. Em cada um desses casos, encontre uma base para o subespaço e determine sua dimensão.
12) Encontre a dimensão do subespaço gerado por
21,cos(2 ),cos ( )x x em [ , ]C − .
13) Encontre a dimensão do subespaço 3P gerado pelos vetores dados em cada um dos itens a seguir.
a) 2, 1, 1x x x− − c) 2 2, 1, 1x x x x− − +
b) 2 2, 1, 1, 1x x x x− + − d) 2 , 2x x −
Seção 5 - Mudança de Base
1) Para um dos itens a seguir, encontre a matriz que correspon-de à mudança de base 1 2[ , ]u u para a base 1 2[e ,e ] .
a) 1 (1,1)Tu = , 2 ( 1,1)Tu = −
b) 1 (1, 2)Tu = , 2 (2,5)Tu =
c) 1 (0,1)Tu = , 2 (1,0)Tu =

197
2) Para cada uma das bases coordenadas 1 2[ , ]u u no exercício 1, encontre a matriz mudança de base de 1 2[e ,e ] para 1 2[ , ]u u .
3) Sejam 1 (3, 2)Tv = e 2 (4,3)Tv = para cada uma das bases orde-nadas 1 2[ , ]u u no exercício 1, encontre a matriz mudança de base de 1 2[v , v ] para 1 2[ , ]u u .
4) Seja [(5,3) , (3, 2) ]T TE = e sejam (1,1)Tx = , (1, 1)Ty = − e (10,7)Tz = . Encontre os vetores de coordenadas [ ]Ex , [ ]Ey e [ ]Ez .
5) Sejam 1 (1,1,1)Tu = , 2 (1, 2, 2)Tu = e 3 (2,3, 4)Tu = .
a) Encontre a matriz mudança de base de 1 2 3[e ,e ,e ] para
1 2 3[ , , ]u u u .
b) Encontre as coordenadas de cada um dos vetores a seguir, em relação a 1 2 3[ , , ]u u u .
i) (3, 2,5)T ii) (1,1, 2)T iii) (2,3, 2)T
6) Sejam 1 (4,6,7)Tv = , 2 (0,1,1)Tv = e 3 (0,1, 2)Tv = e sejam 1u , 2u e 3u os vetores dados no exercício 5.
a) Encontre a matriz mudança de base de 1 2 3[ , , ]v v v para
1 2 3[ , , ]u u u .
b) Se 1 2 32 3 4x v v v= + − , determine as coordenadas de x em relação a 1 2 3[ , , ]u u u .
7) Considere 1
12
v =
, 2
23
v =
, 3 51 2
S = −
. Encontre vetores 1w
e 2w tais que S é a matriz mudança de base de 1 2[ , ]w w para 1 2[ , ]v v .
8) Considere 1
26
v =
, 2
14
v =
, 4 12 1
S =
. Encontre vetores 1u
e 2u , tais que S é a matriz mudança de base de 1 2[ , ]v v para 1 2[ , ]u u .
9) Sejam [ ,1]x e [2 1,2 1]x x− + duas bases ordenadas para 2P .
a) Encontre a matriz mudança de base que representa a mu-dança de coordenadas de [2 1,2 1]x x− + para [ ,1]x .

198
b) Encontre a matriz mudança de base que representa a mu-dança de coordenadas de [ ,1]x para [2 1,2 1]x x− + .
10) Encontre a matriz mudança de base que representa a mu-dança de coordenadas em 3P da base ordenada 2[1, , ]x x para a base ordenada 2[1,1 ,1 ]x x x+ + + .
Seção 6 - Espaço Linha e Coluna
1) Para cada uma das matrizes a seguir, encontre uma base para o espaço linha, uma base para o espaço coluna e uma base para o núcleo.
a) 1 3 22 1 44 7 8
c) 1 3 2 12 1 3 23 4 5 6
−
b) 3 1 3 4
1 2 1 23 8 4 2
− − − −
2) Em cada um dos itens a seguir, determine a dimensão do subespaço de 3
gerado pelos vetores dados.
a) 12
2
−
, 22
4
−
,
336
−
c) 11
2
−
, 2
24
−
,
32
5
−
, 21
3
−
b) 111
,
123
,
231
3) Seja 1 2 2 3 1 42 4 5 5 4 93 6 7 8 5 9
A =
.
a) Calcule a forma escalonada reduzida por linhas U de A. Quais os vetores colunas de U que correspondem às va-riáveis livres? Escreva cada um desses vetores colunas

199
como uma combinação linear dos vetores colunas corres-pondentes às variáveis líderes.
b) Quais os vetores colunas de A que correspondem às va-riáveis líderes de U ? Esses vetores colunas formam uma base para o espaço coluna de A. Escreva cada um dos vetores colunas de A como uma combinação linear dos vetores dessa base.
4) Para cada uma das escolhas de A e b a seguir, determine se b pertence ao espaço coluna de A e diga se o sistema xA b= é ou não compatível.
a) 1 22 4
A =
, 48
b =
d) 1 1 21 1 21 1 2
A =
, 123
b =
b) 3 61 2
A =
, 11
b =
e) 0 11 00 1
A =
, 252
b =
c) 2 13 4
A =
, 46
b =
f) 1 22 41 2
A =
, 5
105
b =
5) Para cada um dos sistemas compatíveis no Exercício 4, exami-ne os vetores colunas da matriz de coeficientes para determinar se o sistema tem uma solução ou uma infinidade de soluções.
6) Quantas soluções o sistema xA b= vai ter se b pertencer ao espaço coluna de A e se os vetores colunas de A forem linear-mente independentes? Explique.
7) Seja A uma matriz m n× com m n> . Seja mb∈ e suponha que N( ) {0}A = .
a) O que você pode concluir sobre os vetores colunas de A? Eles são linearmente independen tes? Eles geram m
? Explique.

200
b) Quantas soluções o sistema xA b= vai ter se b não per-tencer ao espaço coluna de A? Quan tas soluções o sistema vai ter se b pertencer ao espaço coluna de A? Explique.
8) Sejam A e B matrizes 6 5× . Se dim(N( )) 2A = , qual o posto de A ? Se o posto de B for 4, qual vai ser a dim N(B)?
9) Sejam A e B matrizes equivalentes por linhas.
a) Mostre que a dimensão do espaço coluna de A é igual à dimensão do espaço coluna de B .
b) Os espaços colunas de A e B são necessariamente iguais? Justifique sua resposta.
10) Prove que um sistema linear xA b= é compatível se, e so-mente se, o posto de ( / )A b for igual ao posto de A .
11) Seja A uma matriz m n× .
a) Se B é uma matriz m m× inversível, mostre que BA e A têm o mesmo núcleo e, portanto, o mesmo posto.
b) Se C é uma matriz n n× inversível, mostre que AC e A têm o mesmo posto.
Resumo
O conceito e as principais propriedades dos espaços vetoriais fo-ram definidos e desenvolvidos ao longo deste capítulo.
Alguns, tais como nE (espaço euclidiano, n -dimensional), foram obtidos como generalizações diretas de espaços de duas e três dimensões; entretanto, outros, tais como espaços dos polinômios, das funções, ou das matrizes, surgiram por problemas que apare-cem em cálculo, equações diferenciais e na matemática aplicada. Não obstante que, nos exemplos, cada um dos conjuntos consi-derados tenha diferente natureza, os espaços de dimensão finita
Tópicos que serão estudados futuramente.

201
têm características comuns, tais como as propriedades, a estrutu-ra dos subespaços, bases, dimensão, etc.
O problema da determinação da base de um espaço vetorial po-der ser visto como um dos problemas fundamentais da álgebra linear. A compreensão deste conceito se tornará extremamente importante quando for discutido o problema de diagonalização das matrizes. Sua importância prática encontra-se na análise de problemas aplicados.
O teorema fundamental deste capítulo garantiu a existência de uma base para todo espaço de dimensão finita. De fato, a prova demonstrou que uma base pode ser construída por qualquer con-junto de vetores que gerassem V .
Para uma base dada, a representação de um vetor x em V é úni-ca; os coeficientes da combinação linear de vetores da base são chamados as coordenadas de x nessa base.
As bases ortonormais têm boas propriedades, que serão explora-das na disciplina Álgebra Linear II.
As bases para um espaço vetorial não são únicas. Se forem dadas duas bases para um mesmo espaço vetorial V e para um vetor x que está em V , as coordenadas de x , em relação a ambas as bases, estão relacionadas pela matriz de mudança de base. As matrizes de mudança de base serão usadas nas representações de funções importantes, chamadas transformações lineares.
Em Cálculo, foi necessário introduzir a estrutura dos números reais antes de desenvolver o conceito de uma função (domínios e imagens eram subconjuntos de ).
Já que as aplicações lineares que estudaremos no próximo capí-tulo possuem seus respectivos domínios e imagens como sendo espaços vetoriais, os assuntos estudados neste capítulo são indis-pensáveis para introduzir o conceito de transformação linear.

202
Bibliografia Comentada
STEVE, Leon J. Álgebra linear com aplicações. 4. ed. [S.l.]: LTC, [200-?].
Este livro é apropriado para alunos que tenham conceitos básicos de matrizes e tenham passado por um curso de Geometria Analítica. O estudante deve estar também familiarizado com as noções básicas de Cálculo Diferencial e Integral. Esta nova edição, ao mesmo tempo que mantém a essência das edições anteriores, incorpora uma série de melhorias substanciais: - Conjunto de Exercícios Computacionais em cada Capítulo; - Mais Motivação Geométrica; - Nova Aplicação Envolvendo Teoria dos Grafos e Redes; - Motivação Adicional para a Definição de Determinantes; - A seção sobre Mudança de Base foi transferida para o Cap. 3; - Revisões Importantes na seção sobre Espaços Munidos de Produto Interno; - A seção sobre Normas Matriciais foi transferida para o Cap. 7; - Nova Aplicação: Aproximação de Funções por Polinômios Trigonométricos; - Revisões no Cap. 6.
POOLE, David. Álgebra linear. São Paulo: Pioneira Thomson Learning, 2004.
Este livro foi estruturado de forma bastante flexível, com a preocupação central de que a álgebra linear constitua um assunto estimulante o suficiente e de fácil aprendizado, tornando-a mais acessível ao estudante. Escrito de forma clara, direta e objetiva, aborda temas como Vetores, Matrizes, Autovalores e Autovetores, Ortogonalidade, Espaços Vetoriais, e Distância e Aproximação. A apresentação de conceitos-chave com antecedência, a ênfase em vetores e geometria e os inúmeros exercícios e exemplos que reforçam o fato de a Álgebra Linear ser uma ferramenta valiosa para a modelagem de problemas da vida real consistem no principal diferencial deste livro. A apresentação de pequenos esboços biográficos de muitos dos matemáticos que contribuíram para o desenvolvimento da Álgebra Linear é outro diferencial, valorizando a história da matemática.
LAY, David C. Álgebra linear e suas aplicações. 2. ed. [S.l]: LTC, [200-?].
O texto fornece uma introdução elementar e moderna da álgebra linear e algumas de suas aplicações interessantes, acessível

203
a alunos com a maturidade que dois semestres completos de matemática em nível de terceiro grau, em disciplinas de cálculo em geral, lhes conferem. O objetivo é ajudar os alunos a dominar os conceitos e habilidades básicos que usarão mais tarde em suas carreiras. Os tópicos escolhidos seguem as recomendações do Linear Algebra Curriculum Study Group, que, por sua vez, baseiam-se em uma cuidadosa pesquisa sobre as necessidades reais dos alunos e em um consenso entre os profissionais dos muitos campos que usam a Álgebra Linear.


Transformações Lineares4

207
4 Transformações Lineares
Este capítulo tem como objetivos principais introduzir a noção de transformação linear e mostrar as relações que existem entre as transformações lineares e as matrizes.
Começamos introduzindo a definição de transformação linear e apresentando exemplos que ilustram os efeitos geométricos de algumas transformações no plano. A seguir, mostramos a asso-ciação que existe entre matrizes e transformações lineares, isto é, que toda transformação linear T de um espaço vetorial V de dimensão n num espaço vetorial W de dimensão m pode ser re-presentada por uma matriz m nA × . Esta última idéia nos permite considerar a relação entre as diferentes matrizes que representam o mesmo operador linear. Em muitas aplicações é desejável uma base específica de modo que a matriz que representa a transfor-mação linear seja diagonal ou tenha alguma outra forma simples.
4.1 IntroduçãoUma transformação linear é uma aplicação que leva vetores de um espaço vetorial em outro.
Denotaremos uma transformação linear como :T V W→ , onde T é a transformação linear (uma aplicação, mapeamento, função, etc.) de V em W , onde V (um espaço vetorial) é o domínio e W (um espaço vetorial) é o contradomínio. Para x m∈ , o vetor (x) mT ∈ é chamado de imagem de x (sob a ação de T).
x(x)
Figura 4.1 - Domínio, contradomínio e imagem de : n mT →
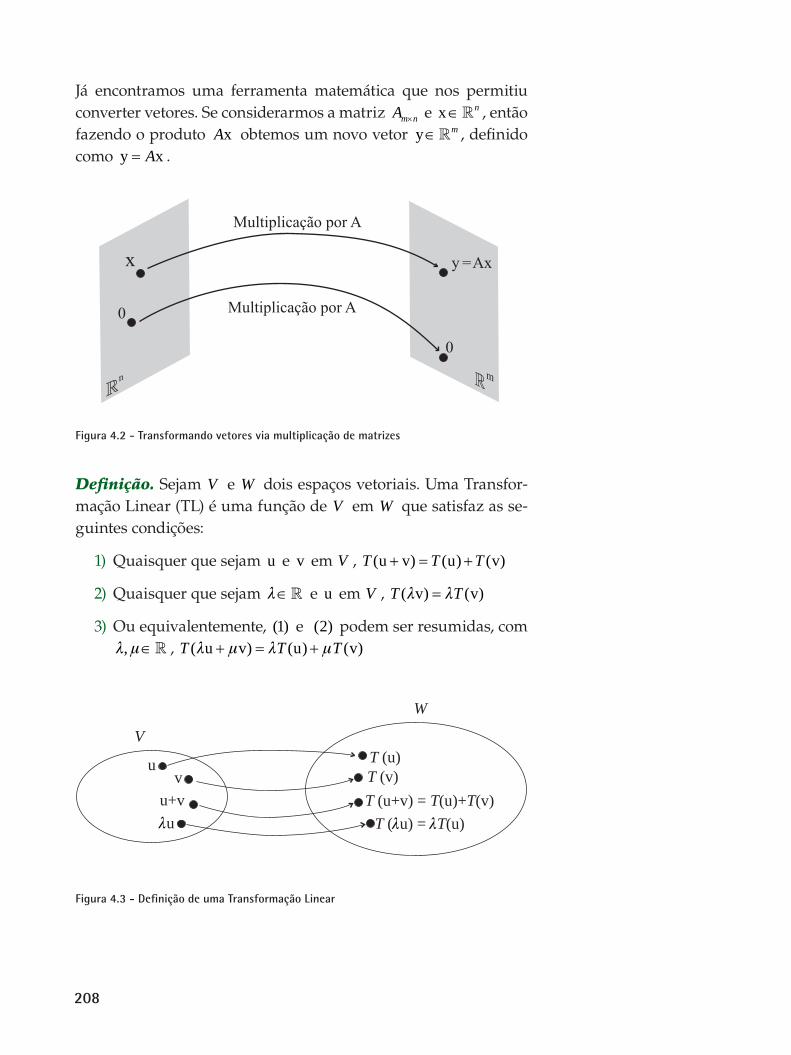
208
Já encontramos uma ferramenta matemática que nos permitiu converter vetores. Se considerarmos a matriz m nA × e x n∈ , então fazendo o produto xA obtemos um novo vetor y m∈ , definido como y xA= .
Figura 4.2 - Transformando vetores via multiplicação de matrizes
Definição. Sejam V e W dois espaços vetoriais. Uma Transfor-mação Linear (TL) é uma função de V em W que satisfaz as se-guintes condições:
Quaisquer que sejam 1) u e v em V , (u v) (u) (v)T T T+ = +
Quaisquer que sejam 2) ∈ e u em V , ( v) (v)T T =
Ou equivalentemente, 3) (1) e (2) podem ser resumidas, com , ∈ , ( u v) (u) (v)T T T + = +
V
W
uv
λ
T (u)
u+vu
T (v)T (u+v) = T(u)+T(v)
T (λu) = λT(u)
Figura 4.3 - Definição de uma Transformação Linear
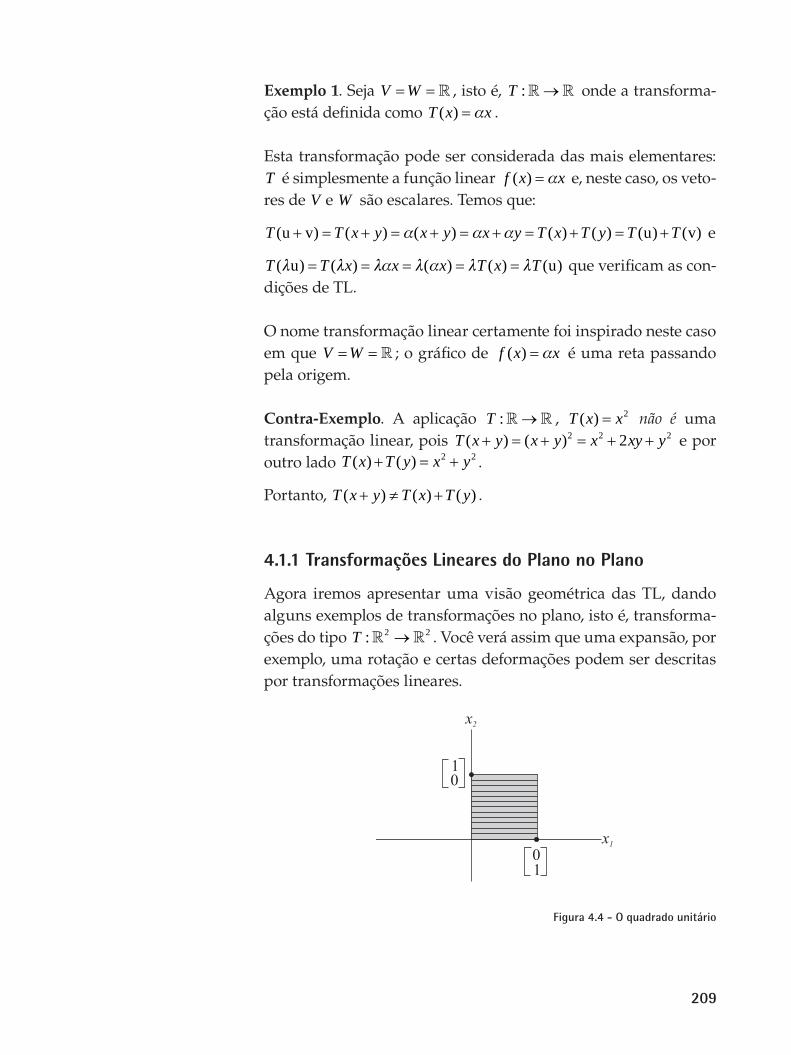
209
Exemplo 1. Seja V W= = , isto é, :T → onde a transforma-ção está definida como ( )T x x= .
Esta transformação pode ser considerada das mais elementares: T é simplesmente a função linear ( )f x x= e, neste caso, os veto-res de V e W são escalares. Temos que:
(u v) ( ) ( ) ( ) ( ) (u) (v)T T x y x y x y T x T y T T + = + = + = + = + = + e
( u) ( ) ( ) ( ) (u)T T x x x T x T = = = = = que verificam as con-dições de TL.
O nome transformação linear certamente foi inspirado neste caso em que V W= = ; o gráfico de ( )f x x= é uma reta passando pela origem.
Contra-Exemplo. A aplicação :T → , 2( )T x x= não é uma transformação linear, pois 2 2 2( ) ( ) 2T x y x y x xy y+ = + = + + e por outro lado 2 2( ) ( )T x T y x y+ = + .
Portanto, ( ) ( ) ( )T x y T x T y+ ≠ + .
4.1.1 Transformações Lineares do Plano no Plano
Agora iremos apresentar uma visão geométrica das TL, dando alguns exemplos de transformações no plano, isto é, transforma-ções do tipo 2 2:T → . Você verá assim que uma expansão, por exemplo, uma rotação e certas deformações podem ser descritas por transformações lineares.
Figura 4.4 - O quadrado unitário

210
a) Expansão (ou Contração Uniforme)
Uma expansão (dilatação) ou contração (compressão) é uma TL do tipo (u) u,T k k= ∈ .
Exemplo 2. Considere, por exemplo, a transformação
1 1
2 2
2(x) 2x 2
2x x
Tx x
= = =
, para todo 2x ∈ .
Como (x y) 2(x y) 2x 2y (x) (y)T T T+ = + = + = + e ( x) 2( x) (2x) (x)T T = = = , assim temos uma TL. Podemos
pensar no efeito que T produz, como “esticando” cada vetor por um fator de 2, isto é, modificando apenas o módulo.
1 2 1 2( , ) ( , )T Tx x kx kx→
Figura 4.5 - Expansões e contrações
b) Projeção (sobre o eixo OX
)
Exemplo 3. Seja a TL definida por 1 1(x) eT x= .

211
Se 1
2
xxx
=
, temos 1
1
1(x)
0 0x
T x = =
. Se 1
2
yyy
=
, temos
1 1
2 2
x yx yx y
+ + = +
e, portanto:
1 1
1 1
1 1
1 1 1 1
( x y)0
0 0
0 0( e ) ( e )
(x) (y)
x yT
x y
x y
x yT T
+ + =
= +
= +
= += +
Logo, temos uma transformação linear que projeta todos os veto-res do plano sobre o eixo das abscissas.
Projeção no eixo • 1x do vetor 1 2( , )Tx x 1 2 1( , ) ( ,0)T Tx x x→
Projeção no eixo • 2x do vetor 1 2( , )Tx x 1 2 2( , ) (0, )T Tx x x→
Figura 4.6 - Projeções do quadrado unitário
c) Reflexões
• Em torno do eixo OX
Exemplo 4. Considere a aplicação definida por 1 2(x) ( , )TT x x= − para todo 2x ∈ .

212
Como
1 1
2 2
1 1
2 2
( x y)( )
(x) (y)
x yT
x y
x yx y
T T
+ + = − +
= + − − = +
Logo T é uma transformação linear. Este operador reflete um ve-tor x em relação ao eixo das abscissas.
1 2 1 2( , ) ( , )T Tx x x x→ −
Figura 4.7 - Reflexões
• Pela origem
Exemplo 5. A aplicação definida por 1 2(x) ( , )TT x x= − − para todo 2x ∈ , inverte os vetores em torno da origem.
1 2 1 2( , ) ( , )T Tx x x x→ − −
Figura 4.8 - Reflexão em relação à origem

213
• Em relação à reta y x= − ( 2 1x x= − )
A aplicação definida por 2 1(x) ( , )TT x x= − − para todo 2x ∈ , in-verte os vetores em torno da reta y x= − .
1 2 2 1( , ) ( , )T Tx x x x→ − −
Figura 4.9 - Reflexão em relação as retas 2 1x x= − e 2 1x x=
d) Rotações
O operador • 2 1(x) ( , )TT x x= − roda cada vetor 2x ∈ em 90º em torno da origem, no sentido anti-horário.
Podemos encontrar uma aplicação que generaliza o caso an-•terior: a rotação de um vetor em um ângulo qualquer (com o sentido de rotação pré-determinado). A transformação pode ser conseguida considerando as seguintes relações:
'1 cos( ) cos cos sen senx r r = + = − ,
Porém, 1cosr x = e 2senr x = .
Então, '1 1 2cos senx x x = − .
Analogamente,
'2 2 1sen ( ) ( sen sen cos cos ) cos senx r r r x x = + = + = + .

214
Logo, a aplicação '
1 21'
1 22
cos sen(x)
sen cosx xx
Tx xx
− = = +
descreve
a rotação de um vetor em um ângulo (neste caso, no sen-tido anti-horário).
Figura 4.10 - Rotação anti-horária em um ângulo
Se considerarmos o caso particular com 2
= , obtemos como re-sultado novamente 2 1(x) ( , )TT x x= − .
e) Cisalhamento Horizontal
O cisalhamento horizontal é dado pela relação 1 2
2
(x)x x
Tx+
=
.
Ele consiste na modificação da primeira coordenada do vetor
1
2
xxx
=
. Como
1 1 2 2
2 2
1 2 1 2
2 2
( )( x y)
(x) (y)
x y a x yT
x y
x ax y ayx y
T T
+ + + + = +
+ + = +
= +
1 1 2 2
2 2
1 2 1 2
2 2
( )( x y)
(x) (y)
x y a x yT
x y
x ax y ayx y
T T
+ + + + = +
+ + = +
= +
1 1 2 2
2 2
1 2 1 2
2 2
( )( x y)
(x) (y)
x y a x yT
x y
x ax y ayx y
T T
+ + + + = +
+ + = +
= +
é uma transformação linear.

215
Figura: 4.11 - Cisalhamentos
f) Translação
Considere o vetor 1
2
aaa
=
e a seguinte aplicação:
1 1
2 2
(x) x ax a
Tx a
+ = + = +
.
Esta não é uma transformação linear a não ser que a seja o vetor nulo.
De fato:1 1 1
2 2 2
1 1 1
2 2 2
( )(x y)
( )
(x) y (x) (y)
x y aT
x y a
x a yx a y
T T T
+ + + = + +
+ = + + = + ≠ +
1 1 1
2 2 2
1 1 1
2 2 2
( )(x y)
( )
(x) y (x) (y)
x y aT
x y a
x a yx a y
T T T
+ + + = + +
+ = + + = + ≠ +
1 1 1
2 2 2
1 1 1
2 2 2
( )(x y)
( )
(x) y (x) (y)
x y aT
x y a
x a yx a y
T T T
+ + + = + +
+ = + + = + ≠ +

216
Logo veremos que o uso de uma proprie-dade das TL simplificará a demonstração
deste último exemplo. (Antecipando: a imagem do vetor nulo deve ser o vetor nulo).
4.1.2 Transformações Lineares de n em m
Exemplo 6. A aplicação 2:T → definida através da expressão
1 2(x)T x x= + é uma TL já que
1 1 2 2
1 2 1 2
( x y) ( ) ( )( ) ( )
(x) (y)
T x y x yx x y y
T T
+ = + + += + + += +
Exemplo 7. A aplicação 2 3:T → definida por
2 1 1 2(x) ( , , )TT x x x x= + é linear, pois
2 2 1 1 1 1 2 2
2 1 1 2 2 1 1 2
(x y) ( , , )
( , , ) ( , , )(x) (y)
T
T T
T x y x y x y x yx x x x y y y y
T T
+ = + + + + +
= + + += +
e
2 1 1 2
2 1 1 2
( x) ( , , )
( , , )(x)
T
T
T x x x xx x x x
T
= +
= +=
Este exemplo nos permite introduzir uma relação entre matrizes e transformações lineares.
Se definirmos a matriz A como
, então, com 2x ∈temos:
21
1 2 1 1 22
1 2
0 1x 1 0 ( , , ) (x)
1 1
T
xx
A x x x x x Tx
x x
= = = + = +
.
Em geral, se A é uma matriz m n× , podemos definir um Opera-dor linear : n mT → por (x) xT A= , x n∈ .
Como apareceu essa última matriz? Não se preocupe, logo estudaremos uma técnica para encontrar esse tipo de matrizes, isto é, matrizes que representam transformações lineares. E, a seguir, veremos que toda transformação linear tem uma matriz associada e vice-versa.

217
De fato, ( x y) ( x y)
x y(x) (y)
T AA AT T
+ = += += +
.
Podemos, então, considerar cada matriz m nA × como um opera-dor linear de n
em m .
Vimos, no exemplo anterior que o operador poderia ter sido defi-nido em termos de uma matriz.
Voltemos a reconsiderar as transformações no plano mencionadas anteriormente, agora como sendo definidas através de matrizes:
Expansão•
1
2
2(x) 2x
2x
Tx
= =
ou 1
2
2 0(x) x
0 2x
T Ax
= =
Projeção•
11 1(x) e
0x
T x = =
ou 1
2
1 0(x) x
0 0x
T Ax
= =
Reflexões•
1
2
(x)x
Tx
= −
ou 1
2
1 0(x) x
0 1x
T Ax
= = −
e 1
2
(x)x
Tx
− = −
ou 1
2
1 0(x) x
0 1x
T Ax
− = = −
Rotações•
2
1
(x)x
Tx
− =
ou 1
2
0 1(x) x
1 0x
T Ax
− = =
e
1 2
1 2
cos sen(x)
sen cosx x
Tx x
− = +
ou 1
2
cos sen(x) A
sen cosx
T xx
− = =
Cisalhamento Horizontal•
1 2
2
(x)x ax
Tx+
=
ou 1
2
1(x) x
0 1xa
T Ax
= =

218
Considere a seguinte matriz (sendo k um escalar) 0
0k
Ak
=
.
Se (x) xT A= , então teremos:
uma dilatação se • 1k >
a identidade se • 1k =
uma contração se • 0 1k< <
a transformação nula se • 0k =
Se V é um espaço vetorial, então o operador identidade é defi-nido por (x) x xT I= = . (onde I é a matriz identidade). E, desse modo, o operador leva V em si mesmo.
Para obter estas matrizes foi utilizado um procedimento heurístico, surgido da expe-
riência adquirida quando realizamos produto de matrizes, o que foi possível devido aos espa-ços e as matrizes resultantes serem de dimen-são pequena.
4.2 Operações com Transformações Lineares
4.2.1 Soma, Multiplicação por Escalar, Composição e Inversa
Se aceitarmos que há uma correspondência entre matrizes e trans-formações lineares, é possível indagar sobre as correspondências entre as operações indicadas nas colunas da seguinte tabela.
Matriz Transformação linear
Multiplicação por escalar: c A⋅ ?
Soma de matrizes: A B+ ?
Produto de matrizes: A B⋅ ?
Inversa de matrizes: 1A− ?
As duas primeiras equivalências podem ser respondidas com facilidade. Sabemos que de Ax temos que ( ) ( )c A x c A x⋅ = ⋅ e ( )A B x Ax Bx+ = + o que nos induz a introduzir as seguintes de-finições:

219
Para a transformação linear : n mT → e o escalar c, a multi-plicação por escalar cT está definida como ( )(x) ( (x))cT c T= .
E também para as transformações lineares T , : n mS → , a adição T S+ está definida pela expressão ( )(x) (x) (x)T S T S+ = + .
Exemplo 8. Seja T e S uma reflexão em torno do eixo das abscissas e uma rotação de 90º graus no sentido anti-horário no plano 2R , respectivamente. A figura seguinte ilustra o efeito da soma T S+ .
x
xx
(x)
Figura. 4.12 - Soma de transformações
A expressão para a soma é
1 2 2 1 1 2 1 2( )(x) (x) (x) ( , ) ( , ) ( , )T T TT S T S x x x x x x x x+ = + = − + − = − − .
O que corresponde em termos matriciais a:
rotaçãoreflexão
1 1 1 2
2 2 1 2
1 0 0 1 1 10 1 1 0 1 1
x x x xx x x x
−− − + = = −− −
Para responder a seguinte questão: “qual é a operação entre as transformações lineares que corresponde ao produto de matri-zes?” teremos que ser um pouco mais cuidadosos.
Se : m nT → e : n pS → são duas transformações lineares, podemos aplicar T e depois S para formar a composta das duas

220
transformações que denotamos por S T . Note que para que S T faça sentido, o contradomínio de T e o domínio de S devem ser o mesmo (neste caso n
), e a transformação resultante S T vai do domínio de T ao contradomínio de S , (neste caso : m pS T → ). A figura mostra esquematicamente como essa composta funcio-na. A definição formal da composta de transformações pode ser obtida lembrando da definição correspondente da composta de funções ordinárias.
Figura 4.13 - A composta de transformações
Claro que gostaríamos que S T também fosse uma TL. Podemos demonstrar isso verificando que (a composta de transformações) satisfaz a definição de transformação linear (TL) (o que será feito na próxima seção), mas, como no momento assumimos que trans-formações lineares podem ser definidas por meio de matrizes, usaremos esse fato para prová-lo.
Teorema. Sejam : m nT → e : n pS → duas transformações lineares e sejam p nA × e n mB × as respectivas matrizes de S e T . Então
: m pS T → é uma transformação linear e suas matrizes são rela-cionadas por p m p n n mC A B× × ×= , onde p mC × é a matriz de S T .
Demonstração. Se v m∈ , aplicando consecutivamente T e S , temos: (v) nT ∈ e ( (v)) ( )(v) pS T S T= ∈ .
Assim temos que:
( )(v) ( (v)) ( v) ( v) v vS T S T S B A B AB C= = = = =
E então definir uma nova transformação linear, digamos : m pR → como (v) vR C= .
Agora também podemos dizer que a matriz da composta é o pro-duto das matrizes e para as transformações lineares : m nT →

221
e : n pS → , a composição de S com T está definida como ( )(v) ( (v))S T S T= .
Exemplo 9. Considere novamente o exemplo anterior onde
1 2(x) ( , )TT x x= − e 2 1(x) ( , )TS x x= − e calculemos S T e T S .
Solução. 1 2 2 1( )(x) ( (x)) (( , ) ) ( , )T TS T S T S x x x x= = − = ou em forma matricial
rotação reflexão
1 1 2
2 2 1
0 1 1 0 0 1( )(x)
1 0 0 1 1 0x x x
S Tx x x
− = = = −
Calculemos agora T S
2 1 2 1( )(x) ( (x)) (( , ) ) ( , )T TT S T S T x x x x= = − = − − ou
rotaçãoreflexão
1 1 2
2 2 1
1 0 0 1 0 1( )(x)
0 1 1 0 1 0x x x
T Sx x x
−− − = = = −− −
A definição da composição de transformações lineares nos per-mitirá introduzir com facilidade a noção de transformação inversa e completar a equivalência que fizemos anteriormente.
Considere uma rotação de 90° no sentido horário em torno da ori-gem, seguida por uma rotação de 90° no sentido anti-horário, que denotamos por 90R− e 90R , respectivamente. Sem dúvida, isso deixa inalterado qualquer vetor de 2
. Podemos expressar esse efeito atra-vés de uma composição de 90R com 90R− como 90 90( )(v) vR R− = .
Já definimos uma transformação linear que chamamos identidade (v) vI = de n
em n , que possui essa característica. Assim pode-
mos escrever, para este caso em particular 90 90(v) ( )(v) vI R R−= = .
Duas transformações que estão relacionadas desse modo são cha-madas de transformações inversas.
Definição. Considere T e S como transformações lineares de n
em n . Então T e S são transformações inversas se
S T T S I= = .

222
Já que nessa definição há uma simetria na relação T e S , dizemos que, quando essa situação ocorre, S é a inversa de T e T é a in-versa de S . Além disso, dizemos que T e S são inversíveis.
Em termos de matrizes, se considerarmos n nA × e n nB × as respectivas matrizes de S e T , vemos imediatamente que, se T e S são trans-formações lineares inversas, tais que ( )(x) x x xS T AB I= = = .
Precisamos ter também ( )(x) x x xT S BA I= = = (Verificar!). Isso mostra que A e B são matrizes inversas.
E mostra algo mais: se uma transformação linear T é inversível, sua matriz canônica tem que ser inversível, e já que matrizes in-versas são únicas, isso significa que a inversa de T também é úni-ca. Portanto, podemos usar a notação de 1T − para nos referirmos a inversa de T . Dessa forma podemos reescrever as equações an-teriores como 1 1 1 1( )(x) x x x ( )(x)T T B B BB T T− − − −= = = = a qual mostra que a matriz de 1T − 1( )B− é a matriz inversa de 1( )T B− . Acabamos de provar o teorema a seguir.
Teorema. Se B é uma transformação inversível, então sua matriz canônica também é inversível e .
Exemplo 10. Determine se a projeção sobre o eixo das abscissas é uma TL inversível.
Solução. A matriz canônica dessa projeção é 1 00 0
, a qual não é
inversível, portanto uma projeção não é inversível. O que é um fato curioso. Tentemos entender: uma projeção leva (“esmaga”) todos os vetores de 2
sobre o eixo x ,
11 1(x) e
0x
T x = =
, 2x∀ ∈ .
Para “desfazer” esse efeito, ou seja, recuperar 1 2x ( , )Tx x= preci-saríamos de uma transformação que leve 1( ,0)Tx para 1 2( , )Tx x . No entanto, existem infinitos candidatos para serem a imagem de
1( ,0)Tx sob essa hipotética transformação inversa, já que não te-mos como determinar 2x no vetor imagem para cada 1( ,0)Tx no domínio de 1T − .
11 1(x) e
0x
T x = =
ou 1
2
1 0(x) x
0 0x
T Ax
= =
Lê-se: “a matriz da transformação inversa é a inversa da matriz da transformação original”

223
4.2.2 Transformações Lineares em Espaços de Funções
Exemplo 11. Seja o operador derivada de uma função real f , , definida por ( ) 'D f f= .
D é uma TL, uma vez que
( ) ( ) '' '( ) ( )
D f g f gf gD f D g
+ = += += +
Exemplo 12. Seja : [ , ]T C a b → uma aplicação definida por
( ) ( )b
a
T f f x dx= ∫ .
Se f e g são dois vetores em [ , ]C a b , então
( ) ( )( )
( ) ( )
( ) ( )
b
ab b
a a
T f g f g x dx
f x dx g x dx
T f T g
+ = +
= +
= +
∫
∫ ∫
T é uma TL.
Exemplo 13. Sejam nV P= , 1nW P += espaços de polinômios de grau n e 1n + , respectivamente, e a aplicação 1: n nT P P +→ defi-nida por:
2 10 1( ( )) ( ) n
nT p x xp x a x a x a x += = + + + .
Sejam ( )p x e ( )q x vetores de nP e k um escalar, temos que:
( ) ( )( ) ( ( )) ( ) ( )T kp x kp x x kp x kxp x kT p= = = = e
( ) ( )( ) ( ( ) ( )) ( ) ( ) ( ) ( )T p q x p q x x p x q x xp x xq x T p T q+ = + = + = + = +
Portanto T é uma TL.
Exemplo 14. Seja ( ) { : / é contínua}V C f f= = → . Considere a aplicação : ( )J C → , onde ( ) (0)J f f= . Com k um escalar, temos:
( ) ( )(0) (0) (0) ( ) ( )J f g f g f g J f J g+ = + = + = + e
( ) ( )(0) (0) ( )J kf kf kf kJ f= = =
e assim J é uma TL.
C 1 [a,b] e C [a,b] são os espaços das funções com primeira derivada contínua e das funções contínuas no intervalo [a,b], respectivamente.

224
Exemplo 15. Seja nV W P= = , : n nT P P→ e considere a transfor-mação
20 1 2( ( )) ( ) ( ) ( ) ( )n
nT p x p ax b a a ax b a ax b a ax b= + = + + + + + + + .
Agora temos
( ) ( )( ) ( ( )) ( )T kp kp ax b k p ax b kT p= + = + = e
( ) ( )( ) ( ) ( ) ( ) ( )T p q p q ax b p ax b q ax b T p T q+ = + + = + + + = +
Portanto, T é uma TL.
Observação. Note que para provar que estas transformações são lineares foram utilizadas propriedades das funções contínuas e deriváveis.
Nas próximas seções serão estabelecidos teoremas, propriedades e alguns resulta-
dos que darão uma estrutura muito útil sobre as transformações lineares.
4.2.3 Propriedades das Transformações Lineares
Se T é uma TL de um espaço vetorial V e um espaço vetorial W , isto é, :T V W→ , temos que:
(0 ) 0V WT =i) (onde 0V e 0W são os vetores nulos de V e W , respectivamente)
Prova. Esta afirmação segue-se da condição ( u) (u)T T = com 0 = . Podemos resumir esta propriedade desta maneira: toda
transformação linear leva o vetor nulo no vetor nulo.
1 1 2 2 1 1 2 2( u u u ) (u ) (u ) (u )n n n nT T T T + + + = + + + ii) .
Prova. Esta afirmação pode ser provada facilmente usando indu-ção matemática.
Veja que esta igualdade é óbvia para 1k = , já que 1 1 1 1( u ) (u )T T = porque T é uma TL. Suponha agora que é verdadeira para k :
1 1 2 2 1 1 2 2( u u u ) (u ) (u ) (u )k k k kT T T T + + + = + + +
Com esta propriedade fica mais fácil verificar que uma translação não é uma TL. Se T (0) ≠ 0, T não é uma TL. Mas, cuidado! T (0) = 0 não é suficiente para que T seja uma TL. Encontre um contra-exemplo!

225
E agora queremos provar para 1k + . Somando 1 1(u )k kT + + a am-bos da última igualdade, obtemos:
1 1 2 2 1 1 1 1 2 2 1 1( u u u ) (u ) (u ) (u ) (u ) (u )k k k k k k k kT T T T T T + + + ++ + + + = + + + +
O lado direito já está da forma que queremos. Usando novamente as condições de TL no termo da esquerda conseguimos escrever esta igualdade da forma:
1 1 2 2 1 1 1 1 2 2 1 1( u u u u ) (u ) (u ) (u ) (u )k k k k k k k kT T T T T + + + ++ + + + = + + + +
que era o que queríamos provar. A transformação de uma combi-nação linear de vetores é igual à combinação linear dos vetores transformados.
Exemplo 16. Determinar qual é a transformação linear T de 2 3→ , tal que 1(e ) (2, 10)TT = − e 2(e ) (0,0,1)TT = .
Seja 11 1 2 2
2
x e ex
x xx
= = +
um vetor arbitrário. Pela aplicação da
transformação que estamos procurando sobre este vetor e usando a propriedade anterior temos:
1 1 2 2
1 1 2 2
1 2
1 1 2
(x) ( e e )T(e ) T(e )
(2, 1,0) (0,0,1)
(2 , , )
T T
T
T T x xx xx x
x x x
= += +
= − +
= −
Exemplo 17. Sejam 2 2V M ×= (espaço das matrizes quadradas 2 2× ) e 4W P= (espaço dos polinômios de grau 4). Qual é a transforma-ção linear 2 2 4:T M P× → , tal que:
4
3 2
2 3
4
1 00 0
0 10 0
0 01 0
0 00 1
T x x
T x x
T x x
T x x
= +
= +
= +
= +
226
Uma matriz 2 2A M ×∈ é da forma a b
Ac d
=
e pode ser escrita
como
1 0 0 1 0 0 0 00 0 0 0 1 0 0 1
a ba b c d
c d
= + + +
, portanto:
1 0 0 1 0 0 0 00 0 0 0 1 0 0 1
1 0 0 1 0 0 0 00 0 0 0 1 0 0 1
1 0 0 1 0 00 0 0 0 1 0
a bT T a b c d
c d
T a T b T c T d
aT bT cT
= + + +
= + + +
= + +
4 3 2 2 3 4
2 3 4
0 00 1
( ) ( ) ( ) ( )( ) ( ) ( ) ( )
dT
a x x b x x c x x d x xa d x b c x b c x a d x
+
= + + + + + + +
= + + + + + + +
Logo, para todo vetor 2 2v M ×∈ (este vetor represen-ta uma matriz), a nossa transformação fica definida como
2 3 4(v) ( ) ( ) ( ) ( )T a d x b c x b c x a d x= + + + + + + + , um polinômio de grau 4.
iii) ( u) (u)T T− = −
Prova. Para provar esta propriedade observe que:
0 (0 ) (u ( u)) (u) ( u)W VT T T T= = + − = + −
O que significa que ( u)T − é o inverso aditivo de (u)T , isto é, ( u) (u)T T− = − .
Exemplo 18. Uma transformação linear importante é aquela que se obtém usando-se o produto escalar. Seja o espaço n
com o produto escalar usual .,. e 0v n∈ um vetor qualquer prefixa-do. Seja a aplicação : nT → definida por 0(v) v , vT = . Mos-traremos que é uma TL utilizando as propriedades do produto escalar. Verifiquemos as condições das transformações lineares. Sejam v, w n∈ e k um escalar, temos que:
0 0( v) v , v v , v (v)T k k k kT= = = e
0 0 0(v w) v , (v w) v , v v , w (v) (w)T T T+ = + = + = +
assim, o produto escalar é uma TL.

227
4.2.4 Composição de Transformações Lineares
Definição. Se :T U V→ e :S V W→ são transformações lineares, a composição de S com T é a aplicação que denotamos por S T (lê-se “S composta com T ”) definida por ( )(u) ( (u))S T S T= , onde u é um elemento de U . Observe que S T é uma aplicação de U em W . Note também que, para a definição fazer sentido, a imagem de T deve estar contida no domínio de S.
Exemplo 19. Sejam duas transformações lineares definidas por:
21 1 1 2
1 2
: , (a) ( ): , ( ( )) ( )
T P T a a a xS P P S p x xp x
→ = + +→ =
Encontre ( )(a)S T .
Solução.
21 1 2 1 1 2 1 1 2( )(a) ( (a)) ( ( ) ) ( ( ) ) ( )S T S T S a a a x x a a a x a x a a x= = + + = + + = + +
Teorema. Se :T U V→ e :S V W→ são transformações lineares, então :T U W→ é uma transformação linear.
Demonstração. Sejam u e v em U e ∈ um escalar, iremos conferir as condições de TL usando o fato de que S e T são trans-formações lineares:
( )(u v) ( (u v))( (u) (v))( (u)) ( (v))
( )(u) ( )(v)
S T S TS T TS T S TS T S T
+ = += += += +
( )( v) ( ( v))( (v))
( (v))( )(v)
S T S TS T
S TS T
====
As propriedades algébricas das transformações lineares espelham as das transformações matriciais, as quais, por sua vez, estão rela-cionadas com as propriedades algébricas das matrizes. Por exem-plo, a composição das transformações lineares é associativa. Para
Em uma seção anterior, definimos a composição
de transformações lineares por matrizes. A definição
se estende de maneira natural para TL em geral.

228
ver isto, considere as seguintes transformações lineares R , S e T , então ( ) ( )R S T R S T= , desde que essas composições façam sentido.
4.3 A Imagem e o Núcleo de umaTransformação Linear
Definição. Seja :T V W→ uma transformação linear e seja S um subespaço de V ( S V⊂ ). A imagem de S , denotada por ( )T S é o conjunto de vetores w W∈ tais que existe um vetor v S∈ , que satisfaça (v) wT = . Ou seja
Im( ( )) { / (v) w para algum v }T S w W T S W= ∈ = ∈ ⊆
A imagem de todo o espaço vetorial V (quando S V= ), Im( ( ))T V , é chamada de imagem de T .
Definição. Seja :T V W→ uma transformação linear. O conjunto de todos os vetores v V∈ em que (v) 0T = é chamado núcleo de T , sendo denotado por Ker( )T . Isto é,
Ker( ) {v / (v) 0 }WT V T V= ∈ = ⊆
É fácil ver que Ker( )T é um subconjunto de V e que, se S é um su-bespaço qualquer de V , então Im( ( ))T S é um subconjunto de W .
Figura 4.14 - Subespaços associados a uma transformação linear
Teorema. Se :T V W→ é uma transformação linear e S é um su-bespaço de V , então:
A palavra kernel é de-rivada do termo cyr-
nel, do inglês antigo, uma forma da palavra corn, que significa grão. Tal como um grão, o kernel de uma transformação line-ar é o seu núcleo, no sen-tido de carregar muitas informações sobre pro-priedades importantes da transformação.

229
• Ker( )T é um subespaço de V
Demonstração. Vamos mostrar que o núcleo de V é fechado sob as operações de adição e multiplicação por escalar.
Seja v Ker( )T∈ , isto é, (v) 0WT = , e é um escalar, então:
( v) (v) 0 0 v Ker( )W WT T T = = = ⇒ ∈
Por outro lado, se 1 2v , v Ker( )T∈ , isto é, 1(v ) 0WT = e
2(v ) 0WT = , então:
1 2 1 2 1 2(v v ) (v ) (v ) 0 0 0 v v Ker( )W W WT T T T+ = + = + = ⇒ + ∈
Im( ( ))T S• é um subespaço de W
Demonstração. A demonstração é semelhante à anterior. Se w Im( ( ))T S∈ , então w (v)T= para algum v S∈ .
Para qualquer escalar , temos w (v) ( v)T T = = . Como v S = , w Im( ( ))T S = e ( )T S é fechado sob a multiplicação
por escalar.
Se 1 2w , w Im( ( ))T S∈ , existem 1 2v , v V∈ tais que 1 1(v ) wT = e 2 2(v ) wT = . Logo, 1 2 1 2 1 2w w (v ) (v ) (v v )T T T+ = + = + e Im( ( ))T S é fechado sob a adição.
Exemplo 20. Seja a transformação 2 2:T → definida por
1(x)0x
T =
.
Um vetor x pertence ao núcleo de T se e somente se 1 0x = , isto é,
11
0(x) 0 0
0 0x
T x = ⇔ = ⇔ =
Logo, os vetores de Ker( )T têm primeira componente nula,
1 2 2 2 22
0x 0e e ex x
x
= = + =
, então Ker( )T é o subespaço unidi-
mensional de 2 gerado por 2e .

230
Escrevendo y (x)T= , o vetor y estará na imagem de T se e so-mente se y é um múltiplo de 1x , isto é,
11 1 2 1 1y (x) e 0e e
0x
T y x x = = ⇔ = + =
.
Logo, 21Im( ) ( ) eT T= = é o subespaço unidimensional de 2
gerado por 1e .
Exemplo 21. Seja 3 2→ a transformação linear definida por
1 2 2 3(x) ( , )TT x x x x= + + .
O núcleo de T pode ser determinado impondo a condição
1 2 2 3(x) 0 ( , ) (0,0)T TT x x x x= ⇔ + + =
ou equivalentemente, x Ker( )T∈ se e somente se
1 21 2 2 3
2 3
0( , ) (0,0)
0T T x x
x x x xx x
+ =+ + = ⇔ + =
.
A solução deste sistema está dada (fazendo a variável livre 3x a= ) por todos os vetores de 3
da forma (1, 1,1)Ta − .
Logo, 3Ker( ) {x / x (1, 1,1) , }TT a a= ∈ = − ∈ .
Agora passemos a determinar a imagem, que deve ser um subespa-
ço de 2 . Se y Im( )T∈ , então 1 2
1 2 32 3
1 1 0y
0 1 1x x
x x xx x
+ = = + + +
.
Então os vetores da imagem são gerados pela combinação linear
dos vetores 1 1 0
, ,0 1 1
, que geram todo 2 , logo 2Im( )T = .
Exemplo 22. Seja 3 3:T → a projeção ortogonal sobre o plano 1 2x x , 1 2(x) ( , ,0)TT x x= .
Temos que 1 2 1 2( , ,0) (0,0,0) 0, 0T Tx x x x= ⇔ = = . Como nada é dito sobre a variável 3x , temos que 3x é qualquer; logo,
3Ker( ) {x / x (0,0,1) , }TT a a= ∈ = ∈ , ou seja, o núcleo de T são todos os vetores que estão sobre o eixo 3x .
A imagem desta transformação é dada diretamente pela sua de-finição, o plano 1 2x x .

231
Para determinar o núcleo de uma transfor-mação linear será necessário
resolver um sistema homogêneo.
Exemplo 23. Seja 3 3:T → a transformação linear que é a pro-jeção ortogonal sobre a reta cujas equações paramétricas são:
1
2
3
1 22 23
x tx tx t
= += −= +
Ache a transformação linear, seu núcleo e imagem.
Solução. Estas são as equações paramétricas de uma reta de 3
que passa pelo ponto (1, 2,3) na direção do vetor u (2, 2,1)T= − (o vetor diretor da reta). Projetar um vetor sobre uma reta é o mesmo que encontrar a projeção ortogonal sobre o vetor diretor dessa mesma reta.
ˆ(x) x= x,u uuT proj= onde uu
| u |= .
Para o nosso caso
1 2 3
1 2 3 1 2 3 1 2 3
(2, 2,1)(x) ( , , ) , (2, 2,1)9
1 (4 4 2 , 4 4 2 ,2 2 ) (0,0,0)9
TT T
T T
T x x x
x x x x x x x x x
−= − =
= − + − + − − + =
Para encontrar o núcleo devemos ter,
1 2 3 1 2 3 1 2 31 (4 4 2 , 4 4 2 ,2 2 ) (0,0,0)9
T Tx x x x x x x x x− + − + − − + =
Que leva ao seguinte sistema homogêneo
1 2 3
1 2 3
1 2 3
4 4 2 04 4 2 0
2 2 ) 0T
x x xx x x
x x x
− + =− + − =
− + =
cuja solução é ( , . 2 2 )Ta b a b− − .
Portanto,
31 2 1 2Ker( ) {x / x ( , , 2 2 ) } [(1,0, 2) , (0,1 2) ]T T TT x x x x= ∈ = − − = − −

232
Para determinar a imagem, fazemos
1 2 3
1 2 3 1 2 3
1 2 3
4 4 2 4 4 24 4 2 4 4 2
2 2 12 2 )T
x x xx x x x x x
x x x
− + − − + − = − + + −
−− +
Logo, todo vetor que pertence à imagem de T é gerado pelos vetores
1
22
1y
= −
, 2
221
y−
= −
, 3
22
1y
= −
.
que são linearmente dependentes. Podemos então escrever que Im( ) [(2, 2,1) ]TT = − (Verificar o porquê!) e é um subespaço unidi-mensional de 3
. Veja que este vetor coincide com o vetor diretor da reta como era de se esperar.
Exemplo 24. Seja 3 3:D P P→ o operador derivada, dado por ( ( )) '( )D p x p x= .
O núcleo de D consiste em todos os polinômios de grau zero,
0( )p x a= de tal forma que 0( ) 0D a = e então, 0Ker( )D P= .
4.4 Transformações Injetoras, Sobrejetoras eIsomorfismos
Definição. Dada uma aplicação :T V W→ , diremos que T é inje-tora se dados u, v V∈ com (u) (v)T T= tivermos u v= . Ou equiva-lentemente, com u v≠ , então (u) (v)T T≠ . Em outras palavras, T é injetora se as imagens de dois vetores distintos são distintas.
Figura 4.15 - Transformações injetoras e não injetoras
Seria conveniente recordar nesse momento as noções de função injetora e sobrejetora, pois estenderemos estes conceitos para as transformações lineares e posteriormente estabeleceremos a relação entre estes conceitos e os de núcleo e imagem.

233
Definição. Uma aplicação :T V W→ será sobrejetora se a imagem de T coincidir com W , ou seja, ( )T V W= .
Observação. Na definição anterior, vimos que uma função será sobrejetora se, dado w W∈ existir v V∈ , tal que (v) wT = .
Figura 4.16 - Transformações sobrejetoras e não sobrejetoras
Teorema. Seja :T V W→ , uma aplicação linear. Então, Ker( ) {0}T = se e somente se T é injetora.
Ker( ) {0} é injetoraT T= ⇔
Corolário. Seja :T V W→ uma aplicação linear injetora. Então, T leva vetores linearmente independentes em vetores linearmente independentes.
Teorema. Seja :T V W→ , uma aplicação linear. Então,
dim(ker( )) dim(Im( )) dim( )T T V+ =
Corolário. Se dim dimV W= , então T é injetora se T é sobrejetora.
Corolário. Seja :T V W→ uma aplicação linear injetora. Se dim dimV W= , então T leva base em base.
Exemplo 25. Seja : n nT P P→ , dada por ( ( )) ( )T p x xp x= . Verifique se T é bijetora.
Solução. Devemos verificar se T é injetora e sobrejetora ao mes-mo tempo. Para isso, usaremos os teoremas e corolários dados an-teriormente.
Este teorema afirma que uma TL injetora só tem o vetor nulo no seu núcleo. E, por outro lado, se uma
TL tiver somente 0 no seu núcleo, então quaisquer
dois vetores distintos devem ter imagens distintas também.

234
Para ver que é injetora, devemos apenas calcular o núcleo de T :
( ( )) ( )T p x xp x=
0 1 0 12 1
0 1
( ) ( )n nn n
nn
T a a x a x x a a x a xa x a x a x +
+ + + = + + +
= + + +
Quais os polinômios tal que ( ( )) 0T p x = ?
2 10 1 0 1( ( )) 0 0 ( ) 0n
n nT p x a x a x a x a a a p x+= ⇔ + + + ⇔ = = = = ⇔ =
( )p x é o polinômio nulo Ker( ) { / ( ) 0, } {0}nT p P p x x= ∈ = ∀ ∈ = (observe que neste caso o vetor nulo de nP é o polinômio nulo de grau n). Portanto, T é injetora.
Como dim 1nP n= + e 1dim 2nP n+ = + e dim(Ker( )) 0T = , temos que:
dim(ker( )) dim(Im( )) 10 dim(Im( ) 1
dim(Im( )) 1
T T nT n
T n
+ = ++ = +
= +
Note que 1dim(Im( )) 1 dim 2nT n P n+= + ≠ = + , então:
1Im( ) nT P +≠ . Portanto, T não é sobrejetora.
Quais são os polinômios que estão faltando na imagem de T ?
Quando uma transformação linear :T V W→ for injetora e sobre-jetora ao mesmo tempo, dá-se o nome de isomorfismo.
Sob o ponto de vista da Álgebra Linear, espaços vetoriais isomorfos são, por assim dizer, idênticos.
Temos então que espaços isomorfos devem ter a mesma dimen-são. Logo, um isomorfismo leva base em base. Alem disso, um isomorfismo :T V W→ tem uma aplicação inversa, que é linear e é também um isomorfismo.
De forma análoga ao que fizemos com o conceito de composição de transformações lineares, voltamos para as nossas definições das transformações inversas definidas por matrizes. Repetiremos estas definições para as transformações inversas, num contexto mais geral. Estamos agora em condições de estabelecer relações e propriedades com maior formalidade.
Estes termos são deri-vados de dois vocá-
bulos gregos: “iso” que significa igual e “morfos” que significa forma.

235
Definição. Seja :T V W→ uma transformação linear. Se existe uma aplicação 1 :T V W− → tal que 1T T I− = e 1T T I− = , en-tão dizemos que T é inversível e que 1T − é a inversa de T .
Propriedades:
Seja 1) :T V W→ uma transformação linear. Se existe 1T − , a inversa de T , então 1T − é uma transformação linear.
Se 2) T é um isomomorfismo, então T é inversível e além dis-so, 1T − também é um isomorfismo.
Podemos concluir que, se :T V W→ é uma transforma-ção linear inversível (um isomorfismo), 1 2E [v , v , , v ]n= e
1 2F [w , w , , w ]m= são bases para V e W , A é a matriz de repre-sentação para T , então A é inversível.
Dois espaços vetoriais são isomorfos se existe uma transformação linear inversível entre eles. Uma transformação linear com essa propriedade é um isomorfismo.
Em particular, se um espaço vetorial tem uma base de dimensão finita, então é isomorfo com o espaço euclidiano. Lembramos que se um espaço vetorial é gerado por um número finito de vetores, então tem uma base de dimensão finita.
Exemplo 26. O espaço vetorial dos polinômios nP com coeficien-tes reais de grau máximo n, é isomorfo com 1n+
?
Solução. Para prová-lo, devemos construir um isomorfismo, isto é, uma aplicação linear bijetora 1n
nP +→ . Para isso consideremos as bases canônicas de 1n+
e nP , 1 2 1{e ,e , ,e }n+ e 2{1, , , , }nt t t , respectivamente, e definimos, 1 2 1(1) e , ( ) e , , ( ) en
nT T t T t += = = Consideremos a aplicação linear de T em um vetor de nP e usemos a última definição dada
20 1 2 0 1
0 1 1 2 1
0 1 2
( ) (1) ( ) ( )e e e
( , , , , )
n nn n
n nT
n
T a a t a t a t a T a T t a T ta a aa a a a
+
+ + + + = + + += + + +
=
Claramente T é linear (pela própria construção) e Ker( ) {0}T = . Logo, é injetora.

236
Como 1dim( ) dim( ) 1nnP n+ = = + é sobrejetora, logo é um iso-
morfismo e é dado como
20 1 2 0 1 2( , , , )n T
n na a t a t a t a a a a+ + + + ⇔
Observação. Este fato pode ser usado na conversão de alguns pro-blemas envolvendo polinômios em vetores de espaços euclidianos.
Exemplo 27. O espaço vetorial das matrizes 2 2M × é isomorfo com 4
. As coordenadas em relação à base
1 0 0 1 0 0 0 0, , ,
0 0 0 0 1 0 0 1
é o isomorfismo ( , , , )Ta ba b c d
c d
↔
.
Para ver isto, proceda em forma análoga ao exemplo anterior.
Dado um isomorfismo, resolver uma questão da Álgebra Linear (que pode ser uma definição, um conceito, uma propriedade, um teorema e sua prova, etc.) em um espaço vetorial é equivalente a re-solver a mesma questão em um outro espaço vetorial, onde tenha-mos alguma familiaridade ou facilidade, ou ainda a questão a ser resolvida seja mais simples. Em particular, para espaços vetoriais finitos, as coordenadas identificam a álgebra linear de um espaço vetorial mais geral com a álgebra linear de um espaço euclidiano.
Para uma transformação linear, :T V W→ as seguintes afirma-ções são equivalentes:
T• é inversível.
T• é bijetora.
Im( )T W=• , ker( ) {0}T = .
Se T for uma TL definida por uma matriz A, na forma (x) xT A= en-tão o núcleo ker( )T e a imagem Im( )T de T podem ser determinados através da análise da matriz A na sua forma reduzida por linhas.
Exemplo 28. Dada a transformação linear 3 3:T → , definida por
1 2 3 1 2 3 1 2 3(x) ( 2 2 , 3 , 2 )TT x x x x x x x x x= + + + + + +
Atenção: aproveite a informação que pode ser obtida analisando uma matriz para determinar o que quer saber de uma TL.

237
mostre que existe a inversa de a) T
explicite b) 1(x)T −
Solução. Veja que dim dim 3V W= = ( 3V W= = ); mostrare-mos que Ker( ) {0}T = e usaremos o corolário adequado para con-cluir que é um isomorfismo.
Sabemos que 1 3 3:T − → é uma TL, tal que 1 1T T T T I− −= = .
Uma forma de proceder é da seguinte maneira: determinamos a matriz da transformação (não deixe de fazer isso, deve ser 3 3× ) e escrevemos a transformação como (x) x yT A= = , logo forma-mos a matriz aumentada [ | y]A e a levamos na forma escalonada reduzida por linhas
1 1 2 3
2 1 2 3
3 1 3
1 2 2 1 0 0 5 2 41 1 3 0 1 0 21 2 1 0 0 1
y y y yy y y yy y y
− + + ↔ − − −
.
Agora resolveremos praticamente ambos os itens em forma simul-tânea: para determinar Ker( )T devemos encontrar a solução de
(x) 0T = para o qual fazemos y 0= ; resolvendo o sistema homo-gêneo temos que Ker( ) {0}T = .
A expressão explícita da inversa está dada pela última coluna da forma escalonada reduzida, logo
11 2 3 1 2 3 1 2(y) ( 5 2 4 ,2 , )TT y y y y y y y y− = − + + − − − .
Consideremos uma outra técnica para obter a inversa.
Temos que 1 1( )(x) ( (x)) (x) xT T T T I− −= = = . Pondo 1y (x)T −= temos (y) xT = , ou seja,
1 2 3 1 2 3 1 2 3 1 2 3(y) ( 2 2 , 3 , 2 ) ( , , )T TT y y y y y y y y y x x x= + + + + + + = .
Esta equação pode ser reescrita como
1 2 3 1
1 2 3 2
1 2 3 3
2 23
2
y y y xy y y xy y y x
+ + = + + = + + =
e resolvendo para y temos

238
1 1 3
2 1 2 3
3 1 2 3
25 2 4
y x xy x x xy x x x
= − = − − = − + +
, assim
11 2 3 1 2 3 1 3(y) ( 5 2 4 ,2 , )TT y y y y y y y y− = − + + − − −
Simplesmente poderíamos considerar inversão da matriz da trans-formação
1
1 2 2 5 2 41 1 3 2 1 11 2 1 1 0 1
A A−
− = → = − − −
, e escrever
1 1 1
1
1 2 3
1 2 3
1 3
( (x)) ( x) (y)y
5 2 42 1 1 y1 0 1
5 2 42
T T T A TA
y y yy y y
y y
− − −
−
= =
=
− = − − −
− + + = − − −
Obtendo mais uma vez a expressão da transformação inversa.
Podemos também escrever a expressão da inversa obtida em for-ma padrão, trocando y por x , para obter
11 2 3 1 2 3 1 3(x) ( 5 2 4 ,2 , )TT x x x x x x x x− = − + + − − − .
Observações:
Em todos os procedimentos utilizados, o custo computacio-a) nal foi praticamente o mesmo. Demandou a resolução de um sistema linear de equações ou o cálculo da inversa de uma matriz.
Um resultado que ainda não foi provado formalmente e que b) nos permitiria mostrar a existência da transformação inver-sa é o seguinte: “Se a matriz de representação for inversível, então existe a inversa da transformação”.
Por este motivo (e muitos outros que aparecerão ainda), a repre-sentação matricial de uma transformação linear se torna um dos problemas básicos da Álgebra Linear.

239
4.5 Representação Matricial de Transformações Lineares
Na seção anterior, mostramos que dada uma matriz m nA × é pos-sível definir uma transformação linear : n mT → dada por
(x) xT A= para cada x n∈ .
Agora, mostraremos que para cada transformação linear : n mT → existe uma matriz m nA × tal que (x) xT A= . Veremos também que qualquer operador linear definido entre dois espaços vetoriais de dimensão finita pode ser representado por uma matriz.
Teorema. Seja : n mT → , então existe uma matriz m nA × tal que (x) xT A= para cada x n∈ . De fato, o j-ésimo vetor coluna da ma-
triz A é dado por
a (e ), 1, 2, ,j jT j n= =
Demonstração. Seja a matriz m nA × (explicitada através de suas colunas):
1 2(a ,a , , a , , a )j nA = , onde 1 2a ( , , , )Tj j j mja a a=
A matriz tem n colunas e cada coluna é um vetor com m com-ponentes.
Para 1,2, ,j n= definimos cada coluna como
1 2a ( , , , ) (e )Tj j j mj ja a a T= = .
E se x n∈ for um vetor arbitrário escrito na base canônica
1 1 2 2x e e en nx x x= + + +
Fazendo (x)T temos:
1 1 2 2
1 1 2 2
1
21 2
(x) T(e ) T(e ) T(e )a a a
(a ,a , ,a )
x
n n
n n
n
n
T x x xx x x
xx
xA
= + + += + + +
=
=

240
Mostramos que cada transformação linear : n mT → pode ser re-presentada em termos de uma matriz. O teorema mostra como cons-truir a matriz que representa um determinado operador linear.
Para obter a primeira coluna de A , aplique o operador linear T ao primeiro vetor da base de n
.
Repita o procedimento até obter todas as colunas de A .
Como usamos os elementos da base canônica de n , 1 2e ,e , , en ,
dizemos que A é a representação canônica de T ou a matriz de T em relação às bases canônicas. Veremos, a seguir, como repre-sentar um operador linear em relação a outras bases.
Exemplo 29. Encontre a transformação 3 2:T → dada por
1 2 2 3(x) ( , )TT x x x x= + + para cada x n∈ .
Solução. Queremos encontrar uma matriz A tal que (x) xT A= . Para fazer isso, construiremos a matriz obtendo suas colunas con-secutivamente calculando 1 1a (e )T= , 2 2a (e )T= e 3 3a (e )T= .
como segue
1 1
2 2
3 3
1a (e ) ,
0
1a (e ) ,
1
0a (e )
1
T
T
T
= =
= =
= =
E então escolhemos esses vetores como as colunas de A ,
1 1 00 1 1
A =
Podemos conferir o resultado calculando xA
11 2
22 3
3
1 1 0x
0 1 1
xx x
A xx x
x
+ = = +
Acabamos de ver como matrizes representam transformações li-neares de n
em m , poderíamos perguntar agora se é possível

241
encontrar uma representação análoga para operadores lineares de V em W , onde V e W são espaços de dimensão n e m , respec-tivamente. Veja o seguinte exemplo.
Exemplo 30. Considere o operador de diferenciação 1 1:D P P→ definido por ( )D a bx b+ = . Se usarmos a base ordenada padrão
(1, )E x= , então ( )E
aa bx
b
+ =
.
E pela aplicação do operador, temos :0
a bD
b
→
Qual a matriz que, aplicada no vetor ( , )Ta b produz o mesmo efei-to que esse operador? Novamente a nossa experiência nos leva a considerar
0 10 0
M =
que satisfaz
0 10 0 0
a a bM
b b
= =
Isto é, a aplicação de D está representada por M. Podemos notar que
( ( )) ( 0 ) 0 0 0D D a bx D b x x+ = + = + = e
0 1 0 1 0 00 0 0 0 0 0
MM = =
A matriz da aplicação D está representada por uma matriz nihil-potente de ordem 2, o que simplesmente significa que a segunda derivada de um polinômio de primeiro grau é zero. As matrizes consideradas nos exemplos dependem da base escolhida para os espaços envolvidos.
Veremos que em geral a matriz de representação de uma trans-formação linear depende das bases escolhidas para o domínio e a imagem. Faremos uma generalização do teorema anterior.
Para fazer isso, consideremos 1 2E [v , v , , v ]n= e 1 2F [w , w , , w ]m= bases ordenadas para V e W , respectivamente e uma transforma-ção linear :T V W→ .
Se v é um vetor arbitrário em V podemos expressá-lo em termos da base E como:
1 1 2 2v v v vn nx x x= + + +

242
Vamos mostrar que existe uma matriz m nA × que representa o ope-rador T no seguinte sentido:
Ax = y se e somente se
A matriz A deve caracterizar o efeito do operador T .
Prova. Pela linea ridade do nosso operador T , temos:
1 1 2 2T(v) (v ) (v ) (v )n nx T x T x T= + + +
Para cada , (1 )k k n≤ ≤ , (v )kT está em W e então pode ser repre-sentado em forma única em termos dos vetores da base F de W como: .
Assim,
1 11 1 21 2 1
2 12 1 22 2 2
1 1 2 2
(v)( w w w )( w w w )
( w w w )
m m
m m
n n n mn m
Tx a a ax a a a
x a a a
== + + ++ + + +++ + + +
Remanejando os termos apropriadamente, temos
11 1 12 2 1 1
21 1 22 2 2 2
1 1 2 2
(v)( )w( )w
( )w
n n
n n
m m mn n m
Ta x a x a xa x a x a x
a x a x a x
== + + ++ + + +++ + + +
Podemos enxergar os coeficientes de 1 2w , w , , wm na última ex-pressão, como sendo exatamente o produto das linhas de A pelo vetor 1 2x ( , , , )T
nx x x=
11 1 12 2 1 1 111 12 1
21 1 22 2 2 21 22 2 2 2
1 21 1 2 2
x
n n n
n n n
m m mn n nm m mn n
a x a x a x x xa a aa x a x a x a a a x x
A A
a a a x xa x a x a x
+ + + + + + = = =
+ + +
a coluna de A , (denotada por a k , 1 k n≤ ≤ ) é exatamente:
A notação utilizada aqui para os coeficientes da combinação linear aik nos ajudará a enxergar a matriz que estamos procurando.

243
1
2a ( (v ))
k
kk k F
mk
aa
T
a
= =
Então, a matriz A , cujas colunas são as coordenadas dos vetores
1 2(v ), (v ), , (v )nT T T , é a matriz desejada. A matriz é única para as bases escolhidas desde que as coordenadas dos vetores sejam únicas nessas bases.
Por outro lado também temos que o vetor de coordenadas de (v)T
em relação a 1 2[w , w , , w ]m são da forma 1
n
i ij jj
y a x=
= ∑ . Logo y xA= .
Acabamos de mostrar o seguinte teorema:
Teorema. Seja uma transformação linear :T V W→ e duas bases or-denadas 1 2E [v , v , , v ]n= e 1 2F [w , w , , w ]m= para V e W respec-tivamente, então existe uma matriz m nA × tal que F E[ (v)] [v]T A= . Seja A a matriz de (v)T em relação as bases ordenadas E e F. De fato, o j-ésimo vetor coluna da matriz A é dado por a [ (v )]j j FT= .
Se denotarmos por
x [v] nE= ∈• : vetor de coordenadas de v em relação a E .
y [w] mF= ∈• : vetor de coordenadas de w em relação a F .
Temos que
se e somente se Ax = y
Mais uma vez as colunas de A são
1 2 1 2(a ,a , , a ) ([ (v )] ,[ (v )] , ,[ (v )] )n F F n FA T T T= =
Exemplo 31. Considere o operador linear D definido por ( ) 'D p p= , que leva 3P em 2P . Dadas as bases ordenadas 2[ , ,1]x x
e [ ,1]x para 3P e 2P , respectivamente, queremos determinar uma representação matricial para D .

244
Solução. Para fazer isso, aplicamos D a cada um dos elementos da base de 3P .
2( ) 2 2( ) 0(1)( ) 1 0( ) 1(1)(1) 0 0( ) 0(1)
D x x xD x xD x
= = += = += = +
Em 2P , os vetores de coordenadas para 2( )D x , ( )D x e (1)D são:
2( ) (2,0)( ) (0,1)(1) (0,0)
T
T
T
D xD xD
→
→
→
A matriz que tem esses vetores por colunas é 2 0 00 1 0
A =
.
Se 2( )p x ax bx c= + + , o vetor de coordenadas de p em relação à base ordenada de 3P é ( , , )Ta b c . Para encontrar o vetor de co-ordenadas de ( )D p em relação à base ordenadas de 2P , basta multiplicar:
2 0 0 20 1 0
aa
bb
c
=
. Logo 2( ) 2D ax bx c ax b+ + = + .
Para encontrar a representação matricial de uma TL : n mT → em relação às bases ordenadas 1 2E [u ,u , , u ]n= e
1 2F [b ,b , , b ]m= , precisamos representar cada vetor (u )jT como uma combinação linear de 1 2b , b , , bn . O teorema a seguir mos-tra que encontrar essa representação é equivalente a resolver o sistema linear x (u )jB T= .
Teorema. Sejam 1 2E [u ,u , , u ]n= e 1 2F [b ,b , , b ]m= bases orde-nadas para n
e m , respectivamente. Se : n mT → é uma trans-
formação linear e A é a matriz de T em relação a E e F , então 1a (u )j jB T−= , onde 1 2(b , b , , b )mB = .
Demonstração. Se A é matriz de representação de T em relação a E e F , então para 1,2, ,j n= , temos
1 1 2 2(u ) b b b
aj j j mj m
j
T a a aB
= + + +
=
A matriz B é inversível, já que suas colunas formam uma base para m
, portanto 1a (u )j jB T−= .
245
Uma conseqüência desse teorema é que podemos determinar a matriz associada a um operador calculando a forma escalonada reduzida por linhas de uma matriz aumentada. O próximo coro-lário mostra como fazer isso.
Corolário. Se A é a matriz de representação de um opera-dor linear : n mT → em relação as bases 1 2E [u ,u , , u ]n= e
1 2F [b ,b , , b ]m= , então a forma escalonada reduzida por linhas da matriz
é
Demonstração. Seja 1 2(b , b , , b )mB = . A matriz
1 2( | (v ), (v ), , (v ))nB T T T
é equivalente por linhas a
1 1 1 11 2 1 2
1 2
( | (v ), (v ), , (v )) ( | (v ), (v ), , (v ))( | a ,a , , a )( | )
n n
n
B B T T T I B T B T B TII A
− − − −===
Exemplo 32. Seja a TL 2 3:T → definida por
2 1 2 1 2(x) ( , , )TT x x x x x= + − .
Encontre a matriz de T em relação as bases ordenadas
1 2E [u ,u ] [(1,2) , (3,1) ]T T= = e
1 2 3F [b ,b ,b ] [(1,0,0) , (1,1,0) , (1,1,1) ]T T T= = .
Solução. O procedimento de solução consiste em formar a ma-triz aumentada e depois levá-la a forma escalonada reduzida por linhas. Para isso, precisamos calcular previamente 1(v )T , 2(v )T ; assim temos que:
1 2 3 1 2
1 1 1 | 2 1 1 0 0 | 1 3(b ,b ,b | (v ), (v )) 0 1 1 | 3 4 0 1 0 | 4 2
0 0 1 | 1 2 0 0 1 | 1 2T T
− − = → − −

246
Logo, a matriz procurada é
1 34 21 2
A− −
= −
O leitor pode verificar que
1 1 2 3
2 1 2 3
(u ) b 4b b(u ) 3b 2b 2b
TT
= − + −= − + +
.
4.6 SemelhançaSabemos da Álgebra Matricial que há alguma facilidade em tra-balhar com matrizes diagonais para realizar determinadas opera-ções como inversão, determinantes, multiplicação, etc. Por exem-plo, se D é uma matriz diagonal, é muito mais fácil calcular (em termos de esforço computacional) xD e xnD do que xA e xnA . Quando crescem as dimensões dos espaços vetoriais também aumentam correspondentemente o tamanho das matrizes de re-presentação. Necessitamos, então, achar uma maneira de obter matrizes de representação o mais simples possível. Desta forma, cálculos envolvendo esses tipos de matrizes, em geral, serão mais fáceis e demandarão menor custo computacional.
Para resolver este problema, devemos descobrir como relacionar diferentes matrizes de representação para uma dada TL. Por uma questão de simplicidade, restringimos a nossa atenção ao caso quando V W= com as mesmas bases para V e W . Também por-que esse é o caso mais freqüente nas aplicações.
O objetivo de uma representação matricial para uma transformação linear T através
de uma matriz A é permitir uma análise de T trabalhando com A. Se a matriz A for simples, fácil de manipular, conseguiremos um ganho, senão, não teremos nenhuma vantagem.
Bases diferentes conduzem a diferentes matrizes. Daí, que uma escolha adequada das bases é de fundamental importância. Obviamente, é desejável trabalhar com as matrizes mais simples possíveis. Es-colher corretamente as bases não é uma tarefa trivial.

247
No exemplo a seguir consideraremos as representações de uma mesma TL selecionando duas bases diferentes com o objetivo de mostrar que as matrizes resultantes possuem diferentes estruturas.
Exemplo 33. Seja a TL de 2 em 2
, definida por
1 1 2(x) (2 , )TT x x x= + .
Solução. Como 1
2(e )
1T
=
e 2
0(e )
1T
=
, a matriz em relação a
1 2[e ,e ] é 2 01 1
A =
.
Usando uma base diferente, a matriz da TL muda. Por exemplo, se
usarmos como base 1
1u
1
=
e 2
1u
1−
=
.
Então, para determinar a matriz de T em relação a 1 2[u , u ] , preci-samos determinar 1 2(u ), (u )T T e escrever esses vetores como uma combinação linear de 1u e 2u . Podemos usar a matriz A para encontrar 1(u )T e 2(u )T .
1 1
2 2
2 0 1 2(u ) u
1 1 1 2
2 0 1 2(u ) u
1 1 1 0
T A
T A
= = =
− −
= = =
Para expressar esses vetores em termos de 1u e 2u , use a matriz de mudança de base de 1 2[e ,e ] para 1 2[u , u ] . Ela é, simplesmente
1 2
1 1(u ,u )
1 1U
− = =
.
Logo, a matriz de mudança de base 1 2[e ,e ] para 1 2[u , u ] é:
1
1 12 21 12 2
U −
= −
Para determinar as coordenadas de 1(u )T e 2(u )T , em relação a
1 2[u , u ] , multiplicamos esses vetores por 1U −
1 11 1
1 12 2
1 12 22 2(u ) u
1 1 2 02 21 1
2 12 2(u ) u1 1 0 12 2
U T U A
U T U A
− −
− −
= = = − − −
= = = −

248
1 11 1
1 12 2
1 12 22 2(u ) u
1 1 2 02 21 1
2 12 2(u ) u1 1 0 12 2
U T U A
U T U A
− −
− −
= = = − − −
= = = −
Então,
1 1 2
2 1 2
(u ) 2u 0u(u ) 1u 1u
TT
= += − +
E a matriz de T em relação a 1 2[u , u ] é 2 10 1
B−
=
.
Qual a relação entre A e B ? Observe que as colunas de B são
11
2u
0U A−
=
e 12
2 1u
0 1U A−− −
= =
Logo, 1 1 1 11 2 1 2( u , u ) (u ,u )B U A U A U A U AU− − − −= = = .
Portanto, se:
i) B é a matriz de T em relação a 1 2[u , u ]
ii) A é a matriz de T em relação a 1 2[e ,e ]
iii) U é a matriz de mudança de base de 1 2[u , u ] para 1 2[e ,e ]
Temos 1B U AU−= .
Os resultados que estabelecemos para esse operador linear par-ticular em 2
são típicos do que acontece em um contexto muito mais geral. Vamos mostrar a seguir que a última relação para B é válida para duas representações matriciais quaisquer de um ope-rador linear de um espaço vetorial de dimensão em si mesmo.
Teorema. Sejam 1 2E [v , v , , v ]n= e 1 2F [w , w , , w ]n= duas bases ordenadas para um espaço vetorial V e seja um operador linear T de V em V . Seja S a matriz de mudança de base de F para E . Se A é a matriz de T em relação a E e B é a matriz de T em relação a F , então 1B S AS−= .
Demonstração. Seja qualquer vetor x n∈ e seja
1 1 2 2v w w wn nx x x= + + + , ou seja Fx [v]= é o vetor de coor-denadas na base F . Defina y xS= , t yA= , z xB= .

249
Figura 4.17 - Matriz mudança de base
Pela definição S temos que Ey [v]= e, portanto
1 1 2 2v v vn nv y y y= + + + .
Como A é a matriz de T em relação a E e B é a matriz de T em relação a F , tem-se Et y [ (v)]A T= = e Fz x [ (v)]B T= = .
A matriz de mudança de base de E para F é 1S − , logo 1t zS − = .
Temos que 1 1 1x y t z xB S AS S A S B− − −= = = = = , então 1 x xS AS B− = para todo x n∈ e portanto, 1S AS B− = .
Outra maneira de ver o teorema é considerar a matriz do opera-dor identidade I em relação às bases ordenadas E e F . Então, se S é a matriz de I em relação às bases ordenadas E e F , A é a matriz de T em relação a E , 1S − é a matriz de I em relação às bases ordenadas F e E .
T pode ser escrito como um operador composto da forma I T I , e a representação de uma composição é o produto das matrizes associadas a cada componente. Logo, a matriz de I T I em re-lação a F é 1S AS− . Se B é a matriz de T em relação a F , então B tem que ser igual a 1S AS− .
Definição. Sejam A e B matrizes n n× . Dizemos que B é seme-lhante a A se existe uma matriz inversível 1S − tal que 1B S AS−= .

250
Figura 4.18 - Semelhança
Observe que, se B é semelhante a A, então A é semelhante a B. Logo, podemos dizer simplesmente que A e B são semelhan-tes. Pelo teorema, se A e B são duas matrizes representando o mesmo operador T , então A e B são semelhantes. Por outro lado, suponha que A é a matriz de T em relação à base ordenada
1 2[v , v , , v ]n e que 1B S AS−= para alguma matriz inversível S . Se os vetores 1 2w , w , , wn são definidos por:
1 11 1 21 2 1
2 21 1 22 2 2
1 1 2 2
w v v vw v v v
w v v v
n n
n n
n n n nn n
s s ss s s
s s s
= + + += + + +
= + + +
então 1 2[w , w , , w ]n é uma base ordenada de V e B é a matriz de T em relação a 1 2w , w , , wn .
Exemplo 34. Considere o operador linear 3 3:D P P→ definido por ( ) 'D p p= . Encontre a matriz B de D em relação a 2[1, , ]x x e a
matriz A de D em relação a 2[1, 2 , 4 2]x x − .
Solução. Aplicando o operador a cada vetor da base 21, ,x x , temos:
2
2
2 2
(1) 0 0(1) 0( ) 0( )( ) 1 1(1) 0( ) 0( )
( ) 2 0(1) 2( ) 0( )
D x xD x x x
D x x x x
= = + +
= = + +
= = + +
Logo, a matriz é dada por
0 1 00 0 20 0 0
B =
.

251
Aplicando agora o operador na base 21, 2 , 4 2x x − , temos:
2
2
2 2
(1) 0 0(1) 0(2 ) 0(4 2)(2 ) 2 2(1) 0(2 ) 0(4 2)
(4 2) 8 0(1) 4(2 ) 0(4 2)
D x xD x x x
D x x x x
= = + + −
= = + + −
− = = + + −
Portanto,
0 1 00 0 20 0 0
A =
.
A matriz de mudança de base S de 2[1, 2 , 4 2]x x − para 2[1, , ]x x e sua inversa são dadas por
1 0 20 2 00 0 4
S−
=
e 1
1 0 1 20 1 2 00 0 1 4
S −
=
.
Você pode verificar que 1A S BS−= .
Veremos agora como utilizar o último teorema dado para encon-trar uma matriz de representação “simples” para uma TL. Sendo assim, podemos perguntar se existe uma base E para V tal que a matriz A de representação de :T V V→ seja diagonal. Visto de um outro modo, isto significa que o nosso problema consiste em encontrar essa base.
Exemplo 35. Seja a TL de 2 em 2
, definida por
1 2 1 2( ) ( 3 , 2 2 )TT x x x x x= + + .
Se possível encontre uma base E para 2 , tal que a matriz de T
em relação à base E seja diagonal.
Solução. A matriz de T em relação à base canônica 1 2[e ,e ] é
1 32 2
A =
.
Essa matriz é diagonalizável. De fato, se escolhermos
1 31 2
S = −
, teremos 1 4 00 1
D S AS− = = −
o que significa que existe uma base para T para a qual a matriz
Uma matriz diagonal pertence à família das
matrizes que consideramos como “simples”.

252
de representação que é diagonal. Se tomarmos uma base para 2
formada pelas colunas de S , isto é,
1 2
1 3F [w , w ] ,
1 2
= = −
Logo, a matriz de T em relação à base F é diagonal. É fácil veri-ficar que essa solução está correta, calculando a matriz D direta-mente. Vemos que:
1 2
1 2
1 4 1 34 0 4w 0w
1 4 1 2
3 3 1 30 ( 1) 0w ( 1)w
2 2 1 2
T
T
− = = + = +
−
= = + − = + − − −
Assim, os vetores de coordenadas que formam as colunas da matriz
de representação nesta nova base são 40
e 01
−
.
Observação. O problema de encontrar uma matriz diagonal as-sociada a um operador linear será estudado na disciplina Álgebra Linear II.
4.7 Matrizes e Transformações Lineares,Equivalências e Propriedades
Seja T uma transformação linear de V em W (dim( ) dim( )V W n= = ) e A a matriz de representação de T em relação as bases de V e de W . As afirmações a seguir são equivalentes:
i) A é inversível, isto é, existe 1A−
ii) x bA = tem solução única
iii) x 0A = só admite a solução trivial
iv) A forma escalonada reduzida por linhas de A é a matriz identidade
v) A é um produto de matrizes elementares

253
vi) posto( )A n=
vii) nulidade( ) 0A =
viii) A tem n vetores coluna linearmente independentes
ix) O espaço coluna de A gera n
x) O espaço linha de A gera n
xi) O espaço nulo de A é o vetor nulo
xii) det( ) 0A ≠
xiii) T é inversível e a matriz associada com a transformação inversa 1T − é 1A−
xiv) T é injetora
xv) T é sobrejetora
xvi) T é um isomorfismo
xvii) ker( ) {0}T =
xviii) Im( )T W=
Exercícios Propostos
Seção 1 - Transformações Lineares
1) Mostre que cada uma das aplicações seguintes é uma trans-formação linear de 2
em 2 . Descre va geometricamente o que
cada uma delas faz.
a) 1 2( ) ( , )TL x x x= − d) 1( )2
L x x=
b) ( )L x x= − e) 2 2( ) eL x x=
c) 2 1( ) ( , )TL x x x=

254
2) Seja L a transformação linear de 2 em si mesmo definida
por 1 2 1 2( ) ( cos sen , sen cos )TL x x x x x = − + . Expresse 1x , 2x e ( )L x em coordenadas polares. Descreva geometricamente o efei-
to dessa transformação linear.
3) Seja a um vetor fixo não-nulo em 2 . Uma aplicação da forma
( )L x x a= + é chamada de translação. Mostre que uma translação não é uma transformação linear. Ilustre geometricamente o efeito de uma translação.
4) Determine se as transformações de 3 em 2
a seguir são ou não lineares.
a) 2 3( ) ( , )TL x x x= c) 1 2( ) (1 , )TL x x x= +
b) ( ) (0,0)TL x = d) 3 1 2( ) ( , )TL x x x x= +
5) Determine se as transformações de 2 em 3
a seguir são ou não lineares.
a) 1 2( ) ( , ,1)TL x x x= c) 1( ) ( ,0,0)TL x x=
b) 1 2 1 2( ) ( , , 2 )TL x x x x x= + d) 2 21 2 1 2( ) ( , , )TL x x x x x= +
6) Determine se as transformações de n n× em n n×
a seguir são ou não lineares.
a) ( ) 2L A A= c) ( ) 1L A A= +
b) ( ) TL A A= d) ( ) TL A A A= −
7) Determine se as transformações de 2P em 3P a seguir são ou não lineares.
a) ( ( )) ( )L p x xp x=
b) 2( ( ))L p x x px= +
c) 2( ( )) ( ) ( ) '( )L p x p x xp x x p x= + +
8) Para cada [0,1]f C∈ [0,1]C , defina ( )L f F= , onde 0
( ) ( )x
F x f t dt= ∫ , 0 1x≤ ≤ .

255
Mostre que L é uma transformação linear de [0,1]C em [0,1]C . Depois, encontre ( )xL e e 2( )L x .
9) Determine se as transformações de [0,1]C em 1 a seguir são
ou não lineares.
a) ( ) (0)L f f= c) ( ) [ (0) (1)] / 2L f f f= +
b) ( ) | (0) |L f f= d)
10) Se L é uma transformação linear de V em W , use indução matemática para provar que
1 1 2 2 1 1 2 2( v v v ) (v ) (v ) (v )n n n nL L L L + + + = + + + .
11) Seja 1 2{ , , , }nv v v uma base para um espaço vetorial V e sejam 1L e 2L duas transformações line ares de V em um espaço vetorial W . Mostre que, se 1 2( ) ( )i iL v L v= para cada 1,2, ,i n= , então 1 2L L= [isto é, mostre que 1 2( ) ( )L v L v= para todo v V∈ ].
12) Seja L , uma transformação linear de 1 em 2
e seja (1)a L= . Mostre que ( )L x ax= para todo 1x ∈ .
13) Seja L um operador linear de um espaço vetorial V nele mesmo. Defina, por recursão, o operador , 1nL n ≥ da seguinte maneira:
1L L=
1( ) ( ( ))k kL v L L v+ = para todo v V∈ .
Mostre que nL é um operador linear para todo 1n ≥ .
14) Sejam 1 :L U V→ e 2 :L V W→ transformações lineares e seja 2 1L L L= , a transformação definida por 2 1( ) ( ( ))L u L L u= para u U∈ . Mostre que L é uma transformação linear de U em W .
15) Determine o núcleo e a imagem de cada uma das transfor-mações lineares de 3
em 3 .
256
a) 3 2 1( ) ( , , )TL x x x x=
b) 1 2( ) ( , ,0)TL x x x=
c) 1 1 1( ) ( , , )TL x x x x=
16) Seja S o subespaço de 3 gerado por 1e e 2e . Para cada um
dos operadores lineares no Exercício 15, determine ( )L S .
17) Determine o núcleo e a imagem de cada uma das transfor-mações lineares de 3P em 3P dadas a seguir.
a) ( ( )) '( )L p x xp x=
b) ( ( )) ( ) '( )L p x p x p x= −
c) ( ( )) ( ) (1)L p x p x p= +
18) Seja :L V W→ uma transformação linear e seja T um su-bespaço de W . A imagem inversa de T , denotada por 1( )L T− , é de-finida por 1( ) {v | (v) }L T V L T− = ∈ ∈ . Mostre que 1( )L T− é um su-bespaço de W .
19) Uma transformação linear :L V W→ é dita injetora se
1 2( ) ( )L v L v= implica que 1 2v v= (isto é, dois vetores distintos
1 2,v v V∈ não podem ser levados no mesmo vetor w W∈ ). Mostre que L é injetora se e somente se ker( ) {0 }VL = .
20) Um operador linear :L V W→ é dito sobrejetora se ( )L V W= . Mostre que o operador 3 3:L → definido por
1 1 2 1 2 3( ) ( , , )TL x x x x x x x= + + + é sobrejetora.
21) Quais dos operadores no Exercício 15 são injetores? Quais são sobrejetores?
22) Seja A uma matriz 2 2× e seja AL o operador definido por
AL Ax= . Mostre que:
a) AL leva 2 no espaço coluna de A .
b) Se A é inversível, então AL é sobrejetora de 2 em 2
.

257
23) Seja D o operador derivada em 3P e seja 3{ | (0) 0}S p P p= ∈ = .Mostre que:
a) D de 3P em 2P é sobrejetora, mas não é injetora;
b) 3:D S P→ é injetora, mas não e sobrejetora.
Seção 2 - Representação Matricial deTransformações Lineares
1) Para cada uma das transformações lineares L no Exercício 1 da Seção 1, encontre a matriz A que representa L .
2) Para cada uma das transformações lineares L de 3 em 2
a se-guir, encontre uma matriz A, tal que ( )L x Ax= para todo x em 3
.
a) 1 2 3 1 2(( , , ) ) ( ,0)T TL x x x x x= +
b) 1 2 3 1 2(( , , ) ) ( , )T TL x x x x x=
c) 1 2 3 2 1 3 2(( , , ) ) ( , )T TL x x x x x x x= − −
3) Para cada uma das transformações lineares L de 3 em 3
a se-guir, encontre uma matriz A, tal que ( )L x Ax= para todo x em 3
.
a) 1 2 3 3 2 1(( , , ) ) ( , , )T TL x x x x x x=
b) 1 2 3 1 1 2 1 2 3(( , , ) ) ( , , )T TL x x x x x x x x x= + + +
c) 1 2 3 3 2 1 1 3(( , , ) ) (2 , 3 , 2 )T TL x x x x x x x x= + −
4) Seja L a transformação linear de 3 em 3
definida por
1 2 3 2 1 3 3 1 2( ) (2 , 2 , 2 )L x x x x x x x x x x= − − − − − − . Determine a matriz A de L em relação a base canônica e use-a para encontrar ( )L x para cada um dos vetores x a seguir.
a) (1,1,1)Tx =
b) (2,1,1)Tx =
c) ( 5,3, 2)Tx = −
5) Encontre a representação matricial canônica para cada um dos operadores lineares L em 2
descritos a seguir.

258
a) L roda cada vetor x de 45° no sentido anti-horário.
b) L reflete cada vetor x em relação ao eixo dos 1x e depois roda o vetor refletido de 90° no sentido trigonométrico.
c) L dobra o comprimento do eixo, depois roda o vetor obti-do de 30° no sentido trigonométrico.
d) L reflete cada vetor x em relação a reta 1 2x x= e depois projeta o vetor refletido sobre o eixo dos 1x .
6) Sejam 1
110
b =
, 2
101
b =
, 3
011
b =
e seja L a transformação
linear de 2 em 3
definida por 1 1 2 2 1 2 3( ) ( )L x x b x b x x b= + + + . En-contre a matriz A de L em relação às bases 1 2[ , ]e e e 1 2 3[ , , ]b b b .
7) Sejam 1
111
y =
, 2
110
y =
, 3
100
y =
e seja I o operador iden-
tidade em 3 .
a) Encontre as coordenadas de 1 2 3( ), ( ), ( )I e I e I e em relação a
1 2 3[ , , ]y y y .
b) Encontre uma matriz A tal que Ax é o vetor de coorde-nadas de x em relação a 1 2 3[ , , ]y y y .
8) Sejam 1 2 3, ,y y y , dados no exercício anterior e seja L a trans-formação linear de 3
em 3 definida por:
1 1 2 2 3 3 1 2 3 1 1 3 2 2 3 3( y y y ) ( )y (2 )y (2 )yL c c c c c c c c c c+ + = + + + + − +
1 1 2 2 3 3 1 2 3 1 1 3 2 2 3 3( y y y ) ( )y (2 )y (2 )yL c c c c c c c c c c+ + = + + + + − +
a) Encontre a matriz de L em relação à base ordenada
1 2 3[ , , ]y y y .
b) Escreva cada um dos vetores x a seguir como uma com-binação linear de 1 2 3, ,y y y e use a matriz encontrada em a) para determinar ( )L x .
i) (7,5, 2)Tx = ii) (3, 2,1)Tx = iii) (1, 2,3)Tx =

259
9) Seja L o operador linear de 2P em 2 definido por
1
0 (0)( ( )) ( )
pL p x p x dx =
∫ . Encontre uma matriz A tal que
( )L x A
+ =
.
10) O operador linear definido por ( ( )) '( ) (0)L p x p x p= + vai de
3P em 2P . Encontre a matriz de L em relação as bases ordenadas2[ , ,1]x x e [2,1 ]x− . Para cada um dos vetores ( )p x em 3P a seguir,
encontre as coordenadas de ( ( ))L p x em relação à base ordenada [2,1 ]x− .
a) 2 2 3x x+ − c) 3x
b) 2 1x + d) 24 2x x+
11) Seja S o subespaço de [ , ]C a b gerado por 2, ,x x xe xe x e . Seja D o operador derivada em S . Encontre a matriz de D em relação à base 2[ , , ]x x xe xe x e .
12) Seja L uma transformação linear de n em n
. Suponha que ( ) 0L x = para algum 0x = . Seja A a matriz de L em relação à base canônica 1 2[ , , , ]me e e . Mostre que A é singular.
13) Seja L um operador linear de um espaço vetorial V em si mesmo. Seja A a matriz de L em relação à base ordenada
1 2[ , , , ]nv v v (isto é, 1
( )n
j ij ii
L v a v=
= ∑ , 1,2, ,j n= ). Mostre que mA é
a matriz de mL em relação à 1 2[ , , , ]nv v v .
14) Sejam 1 2 3[ , , ]E u u u= e 1 2[ , ]F b b= , onde 1 (1,0, 1)Tu = − ,
2 (1, 2,1)Tu = , 3 ( 1,1,1)Tu = − e 1 (1, 1)Tb = − , 2 (2, 1)Tb = − . Para cada uma das transformações lineares L de 3
em 2 a seguir, en-
contre a matriz de L em relação às bases ordenadas E e F .
a) 3 1( ) ( , )TL x x x=
b) 1 2 1 3( ) ( , )TL x x x x x= + −
c) 2 1( ) (2 , )TL x x x= −

260
15) Suponha que 1 :L V W→ e 2 :L W Z→ são transformações li-neares e que E , F e G são bases ordenadas para V , W e Z , respec-tivamente. Mostre que, se A é a matriz de 1L em relação às bases E e F e se B é a matriz de 2L em relação às bases F e G, então a matriz C BA= e a matriz de 2 1 :L L V Z→ em relação a E e G .
(Sugestão: Mostre que 2 1[ ] [( )( )]E GBA v L L v= para todo v V∈ ).
16) Sejam V e W espaços vetoriais com bases ordenadas E e F , respectivamente. Se 1 :L V W→ é uma transformação linear e A é sua matriz em relação a E e F , mostre que:
a) ker( )v L∈ se e somente se [ ] ( )Ev N A∈ .
b) ( )w L V∈ se e somente se [ ]Fw pertence ao espaço coluna de A .
Seção 3 - Semelhança
1) Para cada uma das transformações lineares L de 2 em 2
a seguir, determine a matriz A que representa L em relação a
1 2[ , ]e e (ver Exercício 1 da Seção 2 e a matriz B que representa L em relação a 1 2[ (1,1) , ( 1,1) ]T Tu u= = − ).
a) 1 2( ) ( , )TL x x x= − d) 1( )2
L x x=
b) ( )L x x= − e) 2 2( ) eL x x=
c) 2 1( ) ( , )TL x x x=
2) Sejam 1 2[ , ]u u e 1 2[ , ]v v bases ordenadas de 2 , onde 1
11
u =
,
2
11
u−
=
e 1
21
v =
, 2
10
v =
. Seja L a transformação linear de-
finida por 1 2( ) ( , )TL x x x= − e seja B a matriz de L em relação a
1 2[ , ]u u (do item a) do exercício anterior):
a) Encontre a matriz mudança de base S de 1 2[ , ]u u para
1 2[ , ]v v .

261
b) Encontre a matriz A que representa L em relação a 1 2[ , ]v v calculando 1SBS − .
c) Verifique que
1 11 1 21 2
2 12 1 22 2
( ) v v( ) v v
L v a aL v a a
= += +
3) Seja L a transformação linear em 3 definida por
1 2 3 2 1 3 3 1 2( ) (2 , 2 , 2 )TL x x x x x x x x x x= − − − − − −
e seja A a matriz de L em relação a 1 2 3[ , , ]e e e (ver Exercício 4 da Se-ção 3). Se 1 (1,1,0)Tu = , 2 (1,0,1)Tu = e 3 (0,1,1)Tu = , então 1 2 3[ , , ]u u u é uma base ordenada para 3
.
a) Encontre a matriz mudança de base U de 1 2 3[ , , ]u u u para
1 2 3[ , , ]e e e .
b) Determine a matriz B que representa L em relação a
1 2 3[ , , ]u u u calculando 1U AU− .
4) Seja L o operador linear de 3 em 3
definido por ( )L x Ax= , onde
3 1 22 0 22 1 1
A− −
= − − −
e sejam 1
1v 1
1
=
, 2
1v 2
0
=
e 3
0v 2
1
= −
.
Encontre a matriz mudança de base V de 1 2 3[ , , ]v v v para 1 2 3[ , , ]e e e e use-a para encontrar a matriz B que representa L em relação a 1 2 3[ , , ]v v v .
5) Seja L o operador em 3P definido por
( ( )) '( ) ''( )L p x xp x p x= + .
a) Encontre a matriz A que representa L em relação à 2[1, , ]x x .
b) Encontre a matriz B que representa L em relação à [1, x, 1 + x2].
c) Encontre a matriz S tal que 1B S AS−= .
d) Se 20 1 2( ) (1 )p x a a x a x= + + + calcule ''( ( ))L p x .

262
6) Seja V o subespaço de [ , ]C a b gerado por 1, xe , xe− e seja D o operador derivada em V .
a) Encontre a matriz mudança de base S que corresponde a mudança das coordenadas em relação a [1, , ]x xe e− para [1,cosh ,senh ]x x . Lembrete:
( ) ( )cosh ,senh2 2
x x x xe e e ex x− − + −
= =
b) Encontre a matriz A que representa D em relação à [1,cosh ,senh ]x x .
c) Encontre a matriz B que representa D em relação à [1, , ]x xe e− .
d) Verifique que 1B S AS−= .
7) Prove que, se A é semelhante a B e se B é semelhante a C , então A é semelhante a C .
8) Suponha que 1A SAS −= , onde A é uma matriz diagonal com elementos diagonais 1 2, , , n .
a) Mostre que i i iAs s= , 1, ,i n= .
b) Mostre que, se 1 1 2 2 n nx s s s = + + + , então
1 1 1 2 2 2xk k k kn n nA s s s = + + +
c) Suponha que | | 1i < para 1, ,i n= . O que acontece com kA x quando k → ∞ ? Explique.
9) Suponha que A ST= , onde S é inversível. Seja B TS= . Mos-tre que B é semelhante a A .
10) Sejam A e B matrizes n x n. Mostre que, se A é semelhante a B , então existem matrizes S e T n x n, com S inversível, tais que A ST= e B TS= .
11) Mostre que, se A e B são matrizes semelhantes, então det( ) det( )A B= .

263
12) Sejam A e B matrizes semelhantes. Mostre que:
a) tA e tB são semelhantes.
b) kA e kB são semelhantes para todo inteiro positivo k .
13) Mostre que, se A é semelhante a B e se A é inversível, en-tão B também é inversível e 1A− e 1B− também são semelhantes.
14) O traço de uma matriz n nA × , denotado por tr( )A , é a soma de seus elementos diagonais, isto é, 11 22tr( ) nnA a a a= + + + . Mos-tre que:
a) tr( ) tr( )AB BA= .
b) se A é semelhante a B , então tr( ) tr( )A B= .
15) Sejam A e B matrizes semelhantes e seja um escalar arbitrário. Mostre que:
a) A I− e B I− são semelhantes.
b) 1 1 1 1det( ) det( )n n n nA I B IL L L L B B B B − − − −− = − .
Resumo
O conceito de transformações lineares, um tópico de extrema im-portância da Matemática, tem sido definido e analisado à luz de seu núcleo (kernel), imagem e também através da matriz associa-da à transformação.
Achar a matriz de representação de uma transformação linear pode ser considerado como um dos principais problemas básicos da Álgebra Linear.
Os conceitos aprendidos nesta primeira disciplina são ferramen-tas matemáticas básicas da Álgebra Linear. Com uma boa fami-liaridade em álgebra matricial, transformações lineares e espaços vetoriais, estaremos prontos para compreender e enfrentar outros importantes problemas da Álgebra Linear como: o conceito de
264
ortogonalidade, o estudo de auto-sistemas (autovalores e autove-tores de uma matriz) e o problema de diagonalização; tópicos cor-respondentes à disciplina de Álgebra Linear II.
Bibliografia Comentada
STEVE, Leon J. Álgebra linear com aplicações. 4. ed. [S.l.]: LTC, [200-?].
Este livro é apropriado para alunos que tenham conceitos básicos de matrizes e tenham passado por um curso de Geometria Analítica. O estudante deve estar também familiarizado com as noções básicas de Cálculo Diferencial e Integral. Esta nova edição, ao mesmo tempo que mantém a essência das edições anteriores, incorpora uma série de melhorias substanciais: - Conjunto de Exercícios Computacionais em cada Capítulo; - Mais Motivação Geométrica; - Nova Aplicação Envolvendo Teoria dos Grafos e Redes; - Motivação Adicional para a Definição de Determinantes; - A seção sobre Mudança de Base foi transferida para o Cap. 3; - Revisões Importantes na seção sobre Espaços Munidos de Produto Interno; - A seção sobre Normas Matriciais foi transferida para o Cap. 7; - Nova Aplicação: Aproximação de Funções por Polinômios Trigonométricos; - Revisões no Cap. 6.
POOLE, David. Álgebra linear. São Paulo: Pioneira Thomson Learning, 2004.
Este livro foi estruturado de forma bastante flexível, com a preocupação central de que a álgebra linear constitua um assunto estimulante o suficiente e de fácil aprendizado, tornando-a mais acessível ao estudante. Escrito de forma clara, direta e objetiva, aborda temas como Vetores, Matrizes, Autovalores e Autovetores, Ortogonalidade, Espaços Vetoriais, e Distância e Aproximação. A apresentação de conceitos-chave com antecedência, a ênfase em vetores e geometria e os inúmeros exercícios e exemplos que reforçam o fato de a Álgebra Linear ser uma ferramenta valiosa para a modelagem de problemas da vida real consistem no principal diferencial deste livro. A apresentação de pequenos esboços biográficos de muitos dos matemáticos que contribuíram para o desenvolvimento da Álgebra Linear é outro diferencial, valorizando a história da matemática.

265
LAY, David C. Álgebra linear e suas aplicações. 2. ed. [S.l]:LTC, [200-?].
O texto fornece uma introdução elementar e moderna da álgebra linear e algumas de suas aplicações interessantes, acessível a alunos com a maturidade que dois semestres completos de matemática em nível de terceiro grau, em disciplinas de cálculo em geral, lhes conferem. O objetivo é ajudar os alunos a dominar os conceitos e habilidades básicos que usarão mais tarde em suas carreiras. Os tópicos escolhidos seguem as recomendações do Linear Algebra Curriculum Study Group, que, por sua vez, baseiam-se em uma cuidadosa pesquisa sobre as necessidades reais dos alunos e em um consenso entre os profissionais dos muitos campos que usam a Álgebra Linear.














![arXiv:math/0010173v3 [math.NA] 8 Nov 2000arXiv:math/0010173v3 [math.NA] 8 Nov 2000 Hot-pressing process modeling for medium density fiberboard (MDF) Technical Report 1 . Noberto Nigro](https://static.documents.pub/doc/80x56/6012bac63d7f345093017eb6/arxivmath0010173v3-mathna-8-nov-2000-arxivmath0010173v3-mathna-8-nov-2000.jpg)


