PsychNology Journal, 2011 Volume 9, Number 2, 137 – 163 137 SQUARELAND: A Virtual Environment for Investigating Cognitive Processes in Human Wayfinding Kai Hamburger ∗1 and Markus Knauff 1 1 Experimental Psychology and Cognitive Science; Justus Liebig University Giessen (Germany) ABSTRACT We introduce a new virtual environment (VE) called SQUARELAND, consisting of a 10×10 block maze, which allows for all kinds of investigations in human wayfinding. It enables researchers to quickly implement experiments on indoor- and outdoor wayfinding, including variations of route length, route complexity, availability of landmarks, etc. The basic setup was programmed with the freeware GoogleSketchUp ® . We would like to invite the spatial cognition community to adopt this standardized and highly controllable research tool or at least parts of it, since this could improve comparability and reproducibility of different effects in wayfinding/navigation. Keywords: wayfinding, virtual environment, landmarks, salience, spatial cognition, cognitive maps, learning spatial information, psychology Paper Received 20/08/2010; accepted 27/12/2010. 1. Introduction Everyday we almost effortlessly make our way from home to our working place. We exactly know how to get to our best friends’ places. No doubt, we also know or find the way to the public swimming pool, to the movie theater, or to the shopping mall. Quite often we have knowledge of different routes to the same places, also depending on the means of locomotion: traveling by foot, with the bicycle, or by car. These remarkable performances normally remain to be unconscious and we just take them for granted. We only become aware of them when they fail: if we get lost. Cite as: Hamburger, K., & Knauff, M. (2011). SQUARELAND: A virtual environment for investigating cognitive processes in human wayfinding. PsychNology Journal, 9(2), 137 – 163. Retrieved [month] [day], [year], from www.psychnology.org. ∗ *Corresponding Author Kai Hamburger Justus Liebig University Giessen, Otto-Behaghel-Str. 10F, 35394 Giessen, Germany [email protected]
Transcript
PsychNology Journal, 2011 Volume 9, Number 2, 137 – 163
137
SQUARELAND: A Virtual Environment for Investigating Cognitive Processes
in Human Wayfinding
Kai Hamburger∗1 and Markus Knauff1
1Experimental Psychology and Cognitive Science; Justus Liebig University Giessen
(Germany)
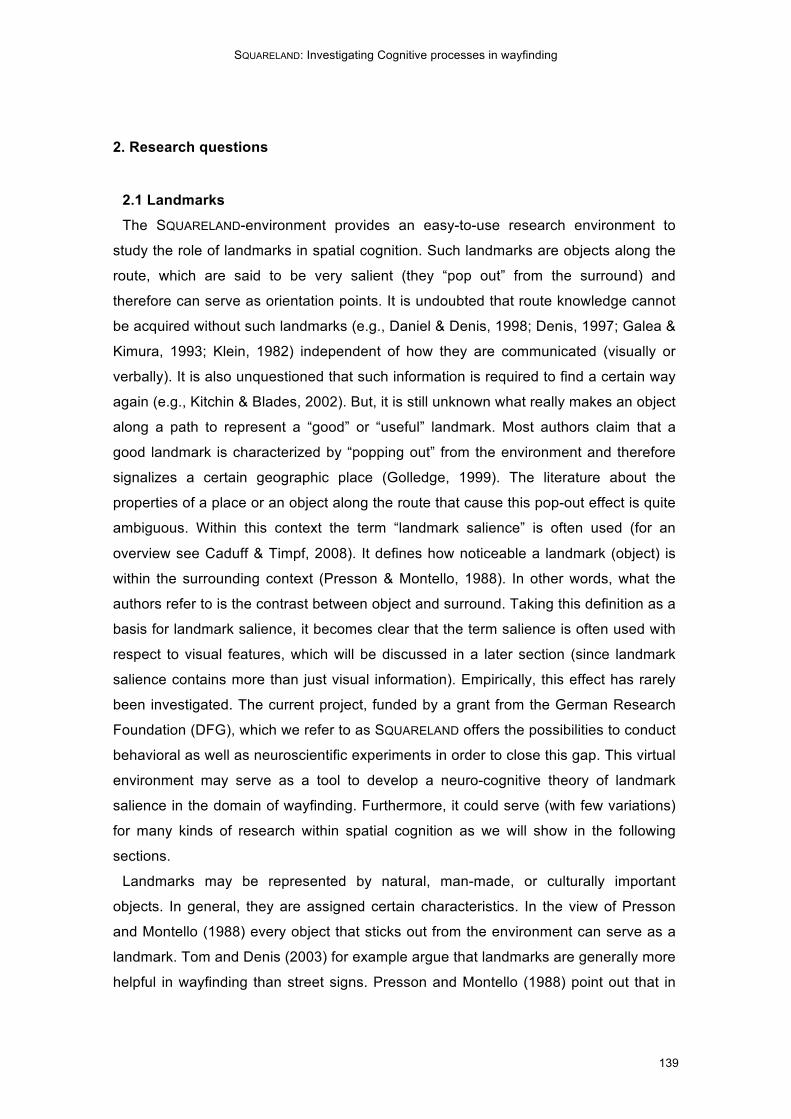
ABSTRACT We introduce a new virtual environment (VE) called SQUARELAND, consisting of a 10×10 block maze, which allows for all kinds of investigations in human wayfinding. It enables researchers to quickly implement experiments on indoor- and outdoor wayfinding, including variations of route length, route complexity, availability of landmarks, etc. The basic setup was programmed with the freeware GoogleSketchUp®. We would like to invite the spatial cognition community to adopt this standardized and highly controllable research tool or at least parts of it, since this could improve comparability and reproducibility of different effects in wayfinding/navigation.
SQUARELAND was inspired by the virtual environment HEXATOWN (Gillner & Mallot,
1998; Mallot & Gillner, 2000; Steck & Mallot, 2000). Here, in contrast to HEXATOWN, we
did not make use of quite unnatural hexahedrons with 120 deg turns but rather a
simple square-shaped structure. The advantage is that this comes a bit closer to
structures in the real world (e.g., compare with the layout of major northern American
cities) and is also closer to the layout of indoor environments such as buildings, since
we here have “real” intersections with turns to the left, to the right, and no turns where
you have to go straight (T-junctions or dead-ends can be implemented as described
above). As a side note, it has also been reported in the literature that orthogonal
turnoffs are better adapted than oblique turns (Montello, 1991; 2005).
3.2 Core features and information for reproduction
For this project our virtual environment SQUARELAND was realized with the freeware
Google SketchUp 6.0® by Google® and can easily be controlled and manipulated. It is
available under www.uni-giessen.de/cms/cognition/squareland. In the default version,
SQUARELAND consists of ten-by-ten cuboids, 10 blocks in horizontal direction, and 10
blocks in vertical direction (Figure 1). Each block has a size of 5.5 x 5.5 x 2.75 meters
(LxWxH) in the virtual environment (or 11 x 11 x 2.75 meters), and each path between
the blocks has a width of 2.75 meters (Figure 4). The walls of the blocks consist of a
hedge structure so that they appear as natural hedges and not like an indoor building
structure, which could be misleading due to systematic structural information.
However, all these settings can be changed with very little effort. Particularity, Google
SketchUp 6.0® (or higher versions) offers many possibilities for material and texture.
Thus, it is also possible to present brick walls or even glass surfaces. Furthermore,
SQUARELAND: Investigating Cognitive processes in wayfinding
147
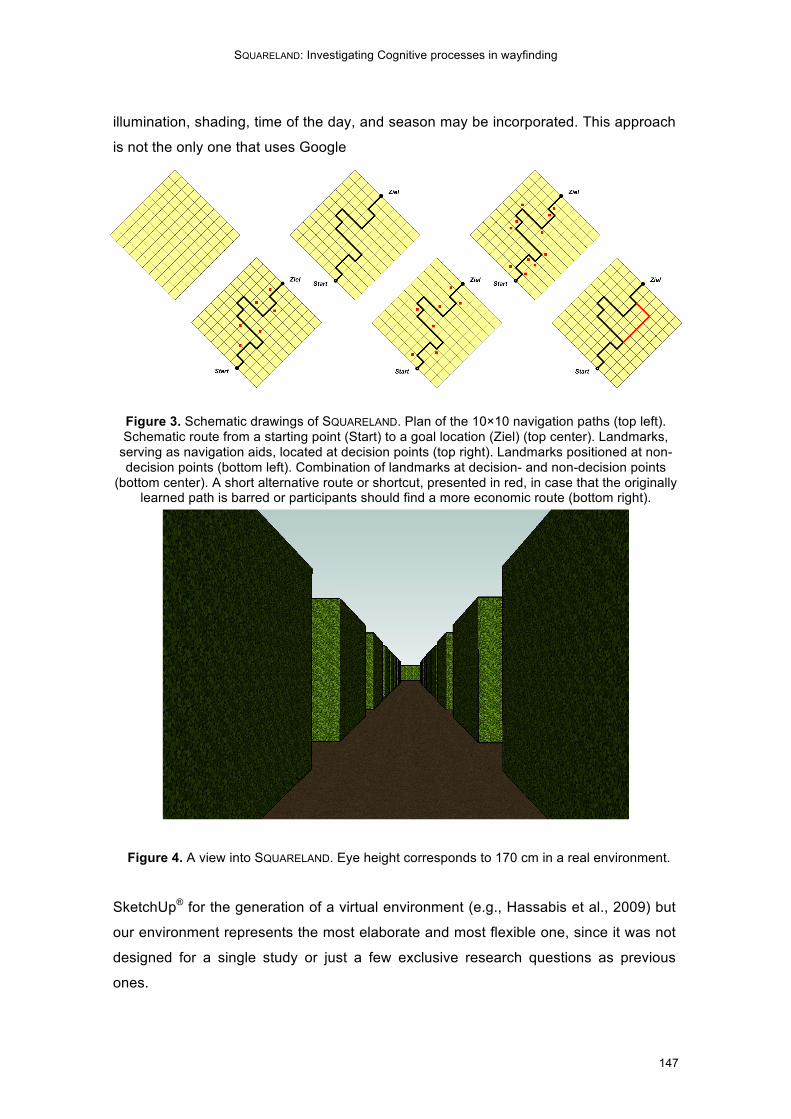
illumination, shading, time of the day, and season may be incorporated. This approach
is not the only one that uses Google
Figure 3. Schematic drawings of SQUARELAND. Plan of the 10×10 navigation paths (top left). Schematic route from a starting point (Start) to a goal location (Ziel) (top center). Landmarks,
serving as navigation aids, located at decision points (top right). Landmarks positioned at non-decision points (bottom left). Combination of landmarks at decision- and non-decision points
(bottom center). A short alternative route or shortcut, presented in red, in case that the originally learned path is barred or participants should find a more economic route (bottom right).
Figure 4. A view into SQUARELAND. Eye height corresponds to 170 cm in a real environment.
SketchUp® for the generation of a virtual environment (e.g., Hassabis et al., 2009) but
our environment represents the most elaborate and most flexible one, since it was not
designed for a single study or just a few exclusive research questions as previous
ones.
K. Hamburger, M. Knauff
148
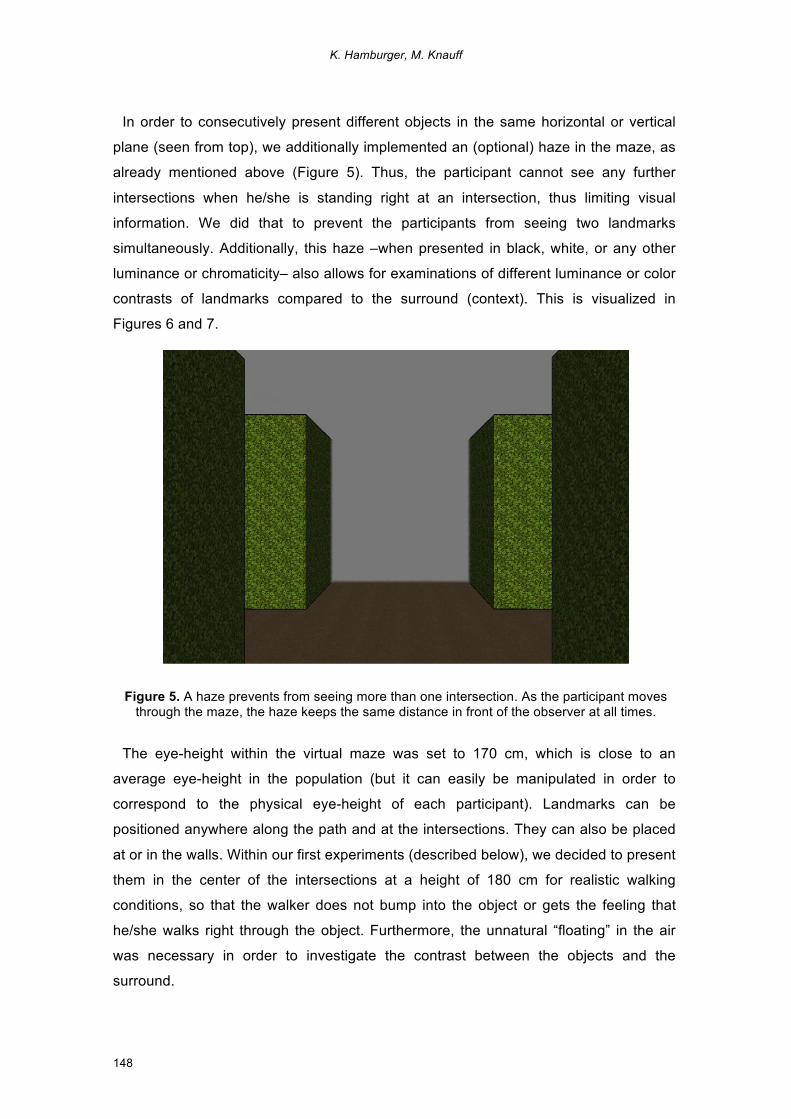
In order to consecutively present different objects in the same horizontal or vertical
plane (seen from top), we additionally implemented an (optional) haze in the maze, as
already mentioned above (Figure 5). Thus, the participant cannot see any further
intersections when he/she is standing right at an intersection, thus limiting visual
information. We did that to prevent the participants from seeing two landmarks
simultaneously. Additionally, this haze –when presented in black, white, or any other
luminance or chromaticity– also allows for examinations of different luminance or color
contrasts of landmarks compared to the surround (context). This is visualized in
Figures 6 and 7.
Figure 5. A haze prevents from seeing more than one intersection. As the participant moves
through the maze, the haze keeps the same distance in front of the observer at all times.
The eye-height within the virtual maze was set to 170 cm, which is close to an
average eye-height in the population (but it can easily be manipulated in order to
correspond to the physical eye-height of each participant). Landmarks can be
positioned anywhere along the path and at the intersections. They can also be placed
at or in the walls. Within our first experiments (described below), we decided to present
them in the center of the intersections at a height of 180 cm for realistic walking
conditions, so that the walker does not bump into the object or gets the feeling that
he/she walks right through the object. Furthermore, the unnatural “floating” in the air
was necessary in order to investigate the contrast between the objects and the
surround.
SQUARELAND: Investigating Cognitive processes in wayfinding
149
In case that anybody wants to rebuilt SQUARELAND for own research projects, we may
also provide additional information or help with setting up this environment (we may
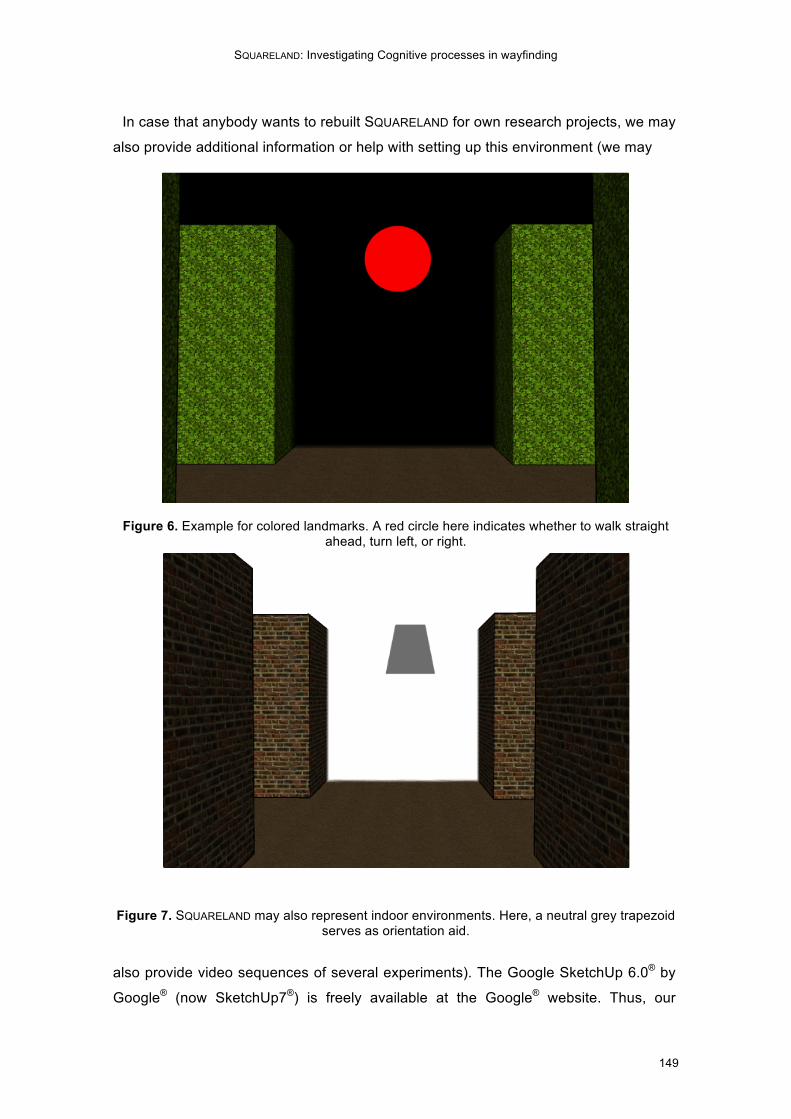
Figure 6. Example for colored landmarks. A red circle here indicates whether to walk straight
ahead, turn left, or right.
Figure 7. SQUARELAND may also represent indoor environments. Here, a neutral grey trapezoid serves as orientation aid.
also provide video sequences of several experiments). The Google SketchUp 6.0® by
Google® (now SketchUp7®) is freely available at the Google® website. Thus, our
K. Hamburger, M. Knauff
150
research tool is cost-saving, easy to handle (since the program is a 3D-drawing
program and no computer programming is required) for scientists as well as for
students. We already implemented it for our regular studies as well as experiments
within diploma and bachelor theses, since it is a hands-on setup and program that just
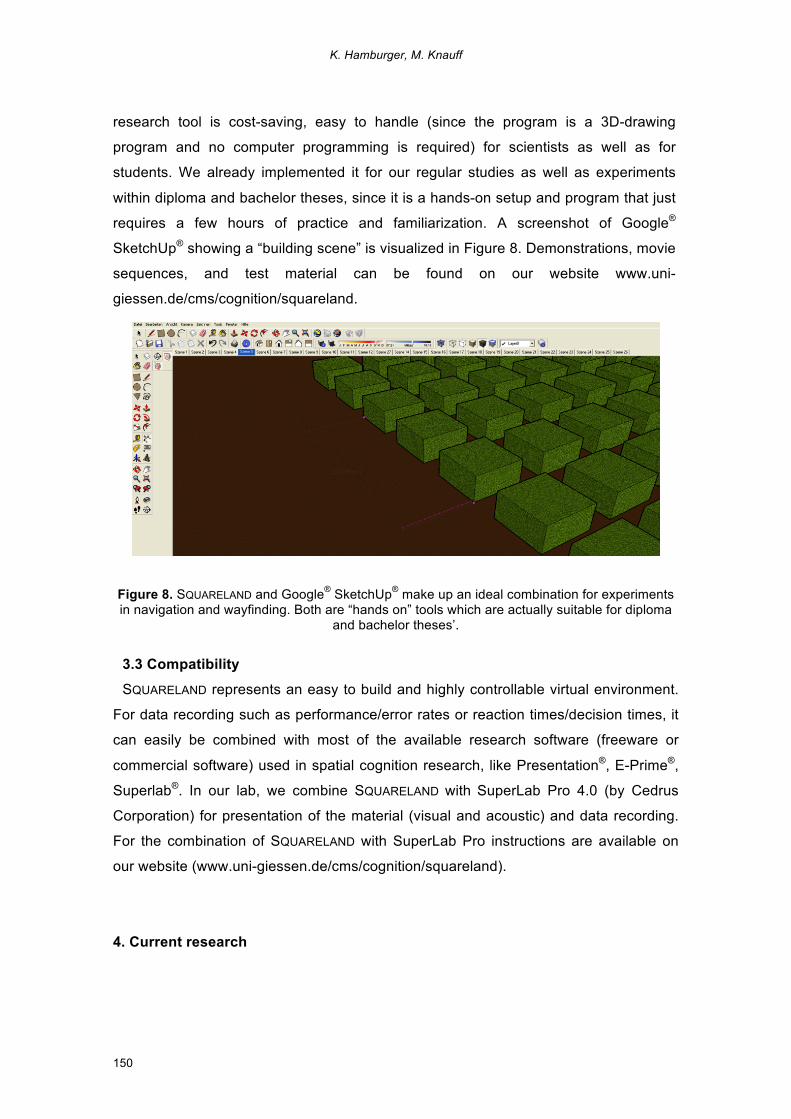
requires a few hours of practice and familiarization. A screenshot of Google®
SketchUp® showing a “building scene” is visualized in Figure 8. Demonstrations, movie
sequences, and test material can be found on our website www.uni-
giessen.de/cms/cognition/squareland.
Figure 8. SQUARELAND and Google® SketchUp® make up an ideal combination for experiments in navigation and wayfinding. Both are “hands on” tools which are actually suitable for diploma
and bachelor theses’.
3.3 Compatibility
SQUARELAND represents an easy to build and highly controllable virtual environment.
For data recording such as performance/error rates or reaction times/decision times, it
can easily be combined with most of the available research software (freeware or
commercial software) used in spatial cognition research, like Presentation®, E-Prime®,
Superlab®. In our lab, we combine SQUARELAND with SuperLab Pro 4.0 (by Cedrus
Corporation) for presentation of the material (visual and acoustic) and data recording.
For the combination of SQUARELAND with SuperLab Pro instructions are available on
SQUARELAND: Investigating Cognitive processes in wayfinding
151
To show the flexibility and value of SQUARELAND, we here provide a brief overview of
some of the studies already realized within this project. In a first (pre-)experiment
participants had to detect different shapes and colors within the virtual environment
(Figure 9). Concerning fast (low-level) detection we could not find any significant
differences between the different shapes or colors (however, achromatic patterns were
less accurately and more slowly recognized compared to chromatic patterns within the
two surrounds; in contrast to our knowledge from perceptual research). What we rather
found was a moderate to high negative correlation between the detection performance
(reaction time and errors) and spatial IQ, measured with the IST2000R (Amthauer,
Brocke, Liepmann, & Beauducel, 2001). In other words, the higher the spatial abilities
were, the lower were the reaction times and errors. This issue could be of high interest
in future studies on navigation.
Figure 9. The hedge structure may also be replaced by more realistic urban scenes. Here, simple row houses are shown. More complex scenes with green areas, etc can easily be
implemented in SQUARELAND.
In a follow-up experiment participants were initially led through the SQUARELAND
environment (passively), in order to learn certain landmarks/objects and the
corresponding route information. They were asked to encode the different shapes or
colors of the objects (Figure 6) at the intersections and should also remember the
directions of the route (left turn, right turn, straight on). In the first experiment of this
series the participants had to pass a recognition task subsequently to the training
phase (Wahl, Hamburger, & Knauff, 2008a and b), while in the second experiment the
K. Hamburger, M. Knauff
152
navigation sequence (video) was shown again and participants had to indicate the
directions at each intersection where the landmarks/objects were located. Both
experiments showed some shapes and colors to be better remembered than others,
even though the effects were quite small and unsystematic in nature. Additionally, no
evidence for the necessity of a high contrast to the background –as suggested in quite
many definitions (e.g., Presson & Montello, 1988)– could be found. Taken together,
these results provide a good basis for future empirical work on landmark salience.
Within these experiments we also investigated the influence of instruction (remember
objects, remember path, just watch the video sequence). Task instruction did not
provide any significant differences or advantages for certain groups, e.g., participants
with the task to remember the objects did not outperform the participants who were
just asked to watch the movie sequence in the following recognition or navigation task.
In a third experiment (Hamburger et al., 2010), we investigated which learning form
provides the best route knowledge. For this, we compared three different learning
strategies (map, verbal description, exploration in VE). Learning from a SQUARELAND
map was followed by best navigation performance in the virtual maze. Performance of
the verbal description group was better than that of the exploration group, but
insignificant. Finally, we also found the expected effects of route length (more errors
and higher decision times), except for the map condition. There, participants showed
the identical performance no matter whether eight or 16 landmarks had to be learned
and then navigated. At present another focus is on indoor navigation using different
kinds of landmarks such as visual versus acoustic landmarks or famous versus
unknown landmarks (for an example see Figure 10).
The results obtained so far clearly indicate that further research on landmarks is
required (e.g., our empirical findings do not support theoretical assumptions like “high
contrast”, “low performance with more complex routes”, etc).
5. Proposals for and application of future work
The major aim within this project is to develop a neuro-cognitive theory of landmark
salience in human wayfinding. In order to realize this, SQUARELAND offers the
opportunity to combine behavioral experiments in the virtual environment (VE) with
brain imaging techniques (fMRI). The goals of this project are therefore the following:
SQUARELAND: Investigating Cognitive processes in wayfinding
153
• What exactly determines the salience of a landmark in wayfinding? This question
can be tackled by systematic variations of visual, semantic, and structural
characteristics of different landmarks.
• How can salience be measured quantitatively and how can it be defined formally?
This may be done by developing a scaling-unit for salience with behavioral and
brain imaging experiments and formalization of such data.
• Which neural processes and representations are involved in landmark-based
wayfinding? This can be investigated by means of fMRI experiments in order to
find whether different types of landmarks are associated with the same underlying
brain structures or not (e.g., verbal vs. visual representation). Furthermore, this
could also provide valuable insights in how they are correlated with differences in
wayfinding performance.
Figure 10. An example for indoor navigation with famous landmarks (Sydney opera).
The first series of questions will be dealing with the previously mentioned distinction
between visual, semantic, and structural characteristics of landmarks. The visual
features that distinguish between important and unimportant landmarks will first be
investigated by systematically varying shape or/and color of the different relevant
objects. These experiments very likely focus on bottom-up processing mechanisms
which are closely related to perceptual mechanisms (e.g., Itti & Koch, 2000, 2001;
K. Hamburger, M. Knauff
154
Peters et al., 2005). Such bottom-up mechanisms are interconnected with top-down
mechanisms during wayfinding (goals, etc).
For investigating the issue of semantic contributions to landmark salience, features
such as famousness, familiarity, how well a landmark may be labeled verbally, and
perceptibility of its function will be systematically manipulated. With these semantic
landmark features we investigate the top-down processing of landmarks, e.g.,
attention, experience, knowledge. Most important here will be the influence of
knowledge and language on the usefulness of landmarks. Associated questions are: Is
the object to deal with familiar or unfamiliar? May the objects be named/labeled easily
or not? May these objects be assigned with a specific function? Furthermore, we hope
to find evidence whether landmarks are preferably represented in a visual or a
semantic form. Here comes the distinction between ‘visualizer’ and ‘verbalizer’ in
visual imagery into play (Richardson, 1977).
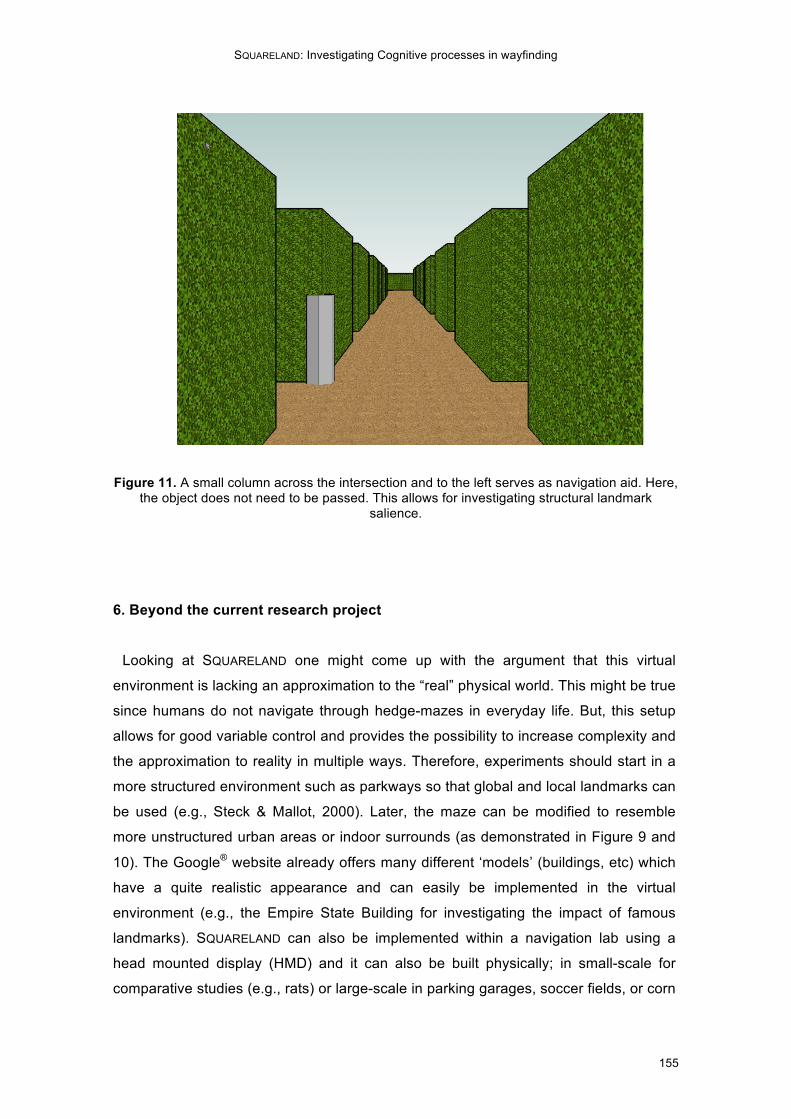
A third group of landmark features to be investigated are the structural
characteristics. These include features that are directly relevant for wayfinding, but
cannot simply be explained in perceptual or conceptual terms. The position of the
landmark close to the route or further away from it as well as its location at a decision
point or a non-decision point belongs to this structural category. An example of
structural features is shown in Figure 11 (position behind the intersection, which
therefore does not need to be passed).
All these features may be investigated systematically with the SQUARELAND setup.
Additionally, it is possible to compare these results with the already existing theoretical
models on landmark salience in order to find out whether they turn out to be
appropriate assumptions about how humans use landmark information. Maybe these
models get support from our empirical data or need to be revised. Finally, the neural
mechanisms involved in landmark-based wayfinding and landmark properties will be
addressed.
SQUARELAND: Investigating Cognitive processes in wayfinding
155
Figure 11. A small column across the intersection and to the left serves as navigation aid. Here,
the object does not need to be passed. This allows for investigating structural landmark salience.
6. Beyond the current research project
Looking at SQUARELAND one might come up with the argument that this virtual
environment is lacking an approximation to the “real” physical world. This might be true
since humans do not navigate through hedge-mazes in everyday life. But, this setup
allows for good variable control and provides the possibility to increase complexity and
the approximation to reality in multiple ways. Therefore, experiments should start in a
more structured environment such as parkways so that global and local landmarks can
be used (e.g., Steck & Mallot, 2000). Later, the maze can be modified to resemble
more unstructured urban areas or indoor surrounds (as demonstrated in Figure 9 and
10). The Google® website already offers many different ‘models’ (buildings, etc) which
have a quite realistic appearance and can easily be implemented in the virtual
environment (e.g., the Empire State Building for investigating the impact of famous
landmarks). SQUARELAND can also be implemented within a navigation lab using a
head mounted display (HMD) and it can also be built physically; in small-scale for
comparative studies (e.g., rats) or large-scale in parking garages, soccer fields, or corn
K. Hamburger, M. Knauff
156
fields to provide the possibility of physical navigation (including both wayfinding and
locomotion; Montello, 2005).
SQUARELAND, as we described it thus far, is not limited to the research questions that
we suggested. It represents much more than that and offers quite many possibilities to
study human spatial cognition. For example, while investigating issues on semantic
salience the influence of language components can systematically be integrated.
Words and names could be presented instead of landmark images (Pazzaglia &
Taylor, 2007). This could be realized in a congruent fashion of presentation and
retrieval (word/word; image/image) or in an incongruent way (word/image;
image/word). This is also interesting for questions on modality-specific processing
within the brain (Meilinger & Knauff, 2008). If the information were modality-specific
then we should obtain something like translation costs from one modality (e.g., vision)
to another (e.g., language).
So far everything was concerned with finding certain ways –which were previously
learned– again. However, it is also possible to have participants learn different routes
within the maze and let them then navigate on new and more economic routes through
the maze (Figure 3, bottom right). Or, it is also possible to block a path so that the
participants are required to find an appropriate detour. All this is related to survey-
knowledge. Within this context global landmarks become even more important (Elias,
Paelke, & Kuhnt, 2006), which may be used in SQUARELAND as well (by just lowering
the wall height).
SQUARELAND may also be implemented in comparative studies as briefly mentioned
above. Within the virtual setup as well as a physical setup of the maze it is possible to
realize similar experiments on the salience of landmarks with rats or other mammals
(e.g., Hölscher, Schnee, Dahmen, Setia, & Mallot, 2005). Such experiments could
provide valuable insights into similarities and dissimilarities of sensoric and cognitive
processes. Finally, SQUARELAND (real and virtual) allows for controlled studies with
blind participants. Within this context (also with unimpaired participants) the use of
auditory landmarks, instead of visually presented material, is of great relevance, e.g.,
to examine the role of semantics, modality-specific processing, translation costs, etc.
We could use certain sounds as landmarks at decision and non-decision points.
Besides blind participants, this project also allows for the inclusion of patients,
preferably with parietal lesions. This might also lead to valuable insights into
processing mechanisms of human navigation, since these patients show different
limitations in navigation performance and spatial abilities.
SQUARELAND: Investigating Cognitive processes in wayfinding
157
The superordinate aim of this project –including behavioral cognitive psychological
methods as well as neuroscientific experiments– is a neuro-cognitive theory of
salience and usefulness of landmarks in wayfinding. It is not just supposed to
supplement current models, but rather implemented to identify how the human brain
processes and makes use of landmark information. These findings could be seminal
for areas such as city planning, and navigation aids or navigation systems.
A major aim of this research amongst our empirical findings that we will obtain is to
provide the community with a new virtual environment research setup that is easy to
use and enables spatial cognition researchers to quickly implement experiments on
indoor- and outdoor wayfinding, including the variation of route length, route
complexity, availability of landmarks, etc. We hope that this also helps to standardize
the experiments that are done in different groups. This could lead to better comparable
findings and faster progress in understanding the fascinating ability of human (and
other animals) wayfinding in natural and virtual environments.
Therefore, we would like to encourage scientists from the spatial cognition
community and the many different research areas to adopt this simple, highly
controllable, cost-saving, hands-on research tool SQUARELAND and help us to improve
it to make it an excellent contribution for future empirical research.
7. Acknowledgement
The research project SQUARELAND is supported by the German Research Foundation
(DFG grant HA5954/1-1). We thank Nadja Stein and Johanna Weinberg for their help
setting up the experiments, and Florian Röser and Cate Trillmich for valuable
comments on the manuscript.
8. References
Abbott, E. A. (1880). Flatland: A Romance of Many Dimensions. Stilwell, KS:
Digireads.com Publishing.
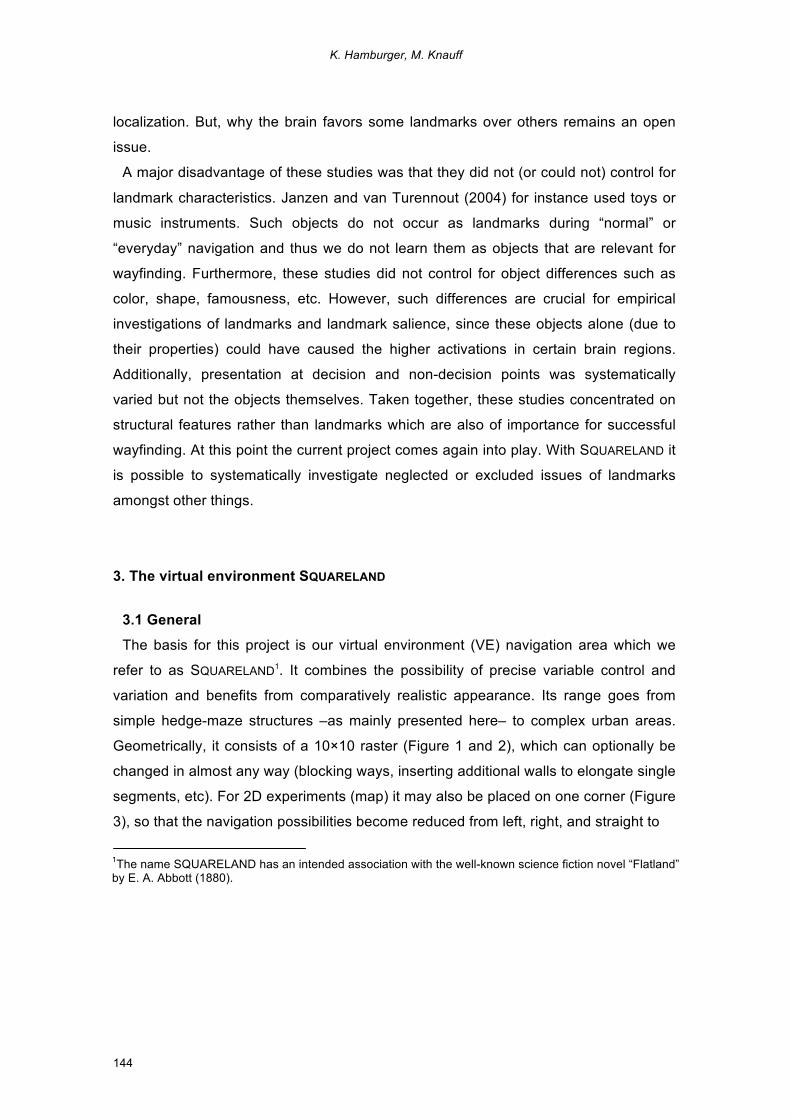
Aguirre, G. K., Detre, J. A., Alsop, D. C., & D’Esposito, M. (1996). The
parahippocampus subserves topographical learning in man. Cerebral Cortex, 6,
823-829.
K. Hamburger, M. Knauff
158
Amthauer, R., Brocke, B., Liepmann, D., & Beauducel, A. (2001). Intelligenz-Struktur-
Test 2000 R (2., erweiterte und revidierte Auflage). Göttingen: Hogrefe.
Bar, M., & Aminoff, E. (2003). Cortical analysis of visual context. Neuron, 38, 347-358.
Blades, M., & Medlicott, L. (1992). Developmental differences in the ability to give route
directions from a map. Journal of Environmental Psychology, 12, 175-185.
Burgess, N., Jeffrey, K. J., & O’Keefe, J. (Eds.) (1999). The Hippocampal and Parietal
Foundations of Spatial Cognition. Oxford: University Press.
Burgess, N., Maguire, E. A., & O’Keefe, J. (2002). The human hippocampus and
spatial and episodic memory. Neuron, 35, 625-641.
Burgess, N., Spiers, H. J., & Paleologou, E. (2004). Orientational manoeuvres in the
dark: dissociating allocentric and egocentric influences on spatial memory.
Cognition, 94, 149-166.
Caduff, D., & Timpf, S. (2008). On the assessment of landmark salience for human
navigation. Cognitive Processing, 9, 249-267.
Coluccia, E., Mammarella, I. C., De Beni, R., Ittyerah, M., & Cornoldi, C. (2007).
Remembering object position in the absence of vision: egocentric, allocentric, and
egocentric decentred frames of reference. Perception, 36, 850-864.
Couclelis, H., Golledge, R. G., & Tobler, W. (1987). Exploring the anchorpoint
hypothesis of spatial cognition. Journal of Environmental Psychology, 7, 99-122.
Daniel, M. P., & Denis, M. (1998). Spatial descriptions as navigational aids: a cognitive
analysis of route directions. Kognitionswissenschaft, 7, 45-52.
Denis, M. (1997). The description of routes: A cognitive approach to the production of
spatial discourse. Current Psychology of Cognition, 16, 409-458.
Denis, M., Pazzaglia, F., Cornoldi, C., & Bertolo, L. (1999). Spatial discorse and
navigation: an analysis of route directions in the City of Venice. Applied Cognitive
Psychology, 13, 145-174.
Dragoi, G., Harris, K. D., & Buzsáki, G. (2003). Place representation within
hippocampal networks is modified by long-term potentiation. Neuron, 39, 843-853.
Ekstrom, A. D., Kahana, M. J., Caplan, J. B., Fields, T. A., Isham, E. A., Newman, E.
L., & Fried, I. (2003). Cellular networks underlying human spatial navigation.
Nature, 425, 184-187.
Elias, B., Paelke, V., & Kuhnt, S. (2006). Kartographische Visualisierung von
Landmarken. Deutsche Gesellschaft für Kartographie, Kartographische Schriften,
Band 10: Aktuelle Entwicklungen in Geoinformation und Visualisierung, Beiträge
des Seminars GEOVIS 2006, Potsdam, 73-81.
SQUARELAND: Investigating Cognitive processes in wayfinding
159
Epstein, R., & Kanwisher, N. (1998). Cortical representation of the local visual
environment. Nature, 392, 598-601.
Galea, L. A. M., & Kimura, D. (1993). Sex differences in route-learning. Personality and
Individual Differences, 14, 53-65.
Galler, I. (2002). Identifikation von Landmarks in 3D-Stadtmodellen. Unpublished


































![Investigating the Environment through Hands-on Activities · Investigating the Environment through Hands-on Activities Lesson 1: Ecosystems and Soils [70 minutes in length] Objectives:](https://static.documents.pub/doc/80x56/5f0e10907e708231d43d7112/investigating-the-environment-through-hands-on-activities-investigating-the-environment.jpg)