51
State Estimation, Observability and BdD Bad Data EE 521 Analysis of Power Systems Chen-Ching Liu, Boeing Distinguished Professor Washington State University

State Estimation, Observability and B d DBad Data
EE 521 Analysis of Power Systems
Chen-Ching Liu, Boeing Distinguished ProfessorWashington State University

Concept of State Estimation (Wood, Wollenberg)
21
100 MW
2
60 MW
M12 (meter)
65 MW40 MWM13
M32
Use the measurements M13 = 5 MW = 0.05 p.u. and M32 = 40 MW = 0.40 p.u.
35 MW (TRUE VALUE)5 MW3
1
p.u.40.01
p.u.05.01
23
3113
x
x
ff f
10.0 ,002.0 findcan we,0213
23
x
Two measurements are sufficient. This example assumes meters are perfectly accurate.

If all 3 meters have some errors. For example,M12 = 62 MWM13 = 6 MWM32 = 37 MW
If only M13 & M32 are used, use DC load flow to show 2 92 25 MW 2 1 M12 58.25 MW
TRUE Values in parentheses)
92.25 MW
(100)
M13
M32
37 MW (40)(MATCHED)
p )64.25 MW
(65)
6 MW(5)
MATCHED
0331 MW
(35)
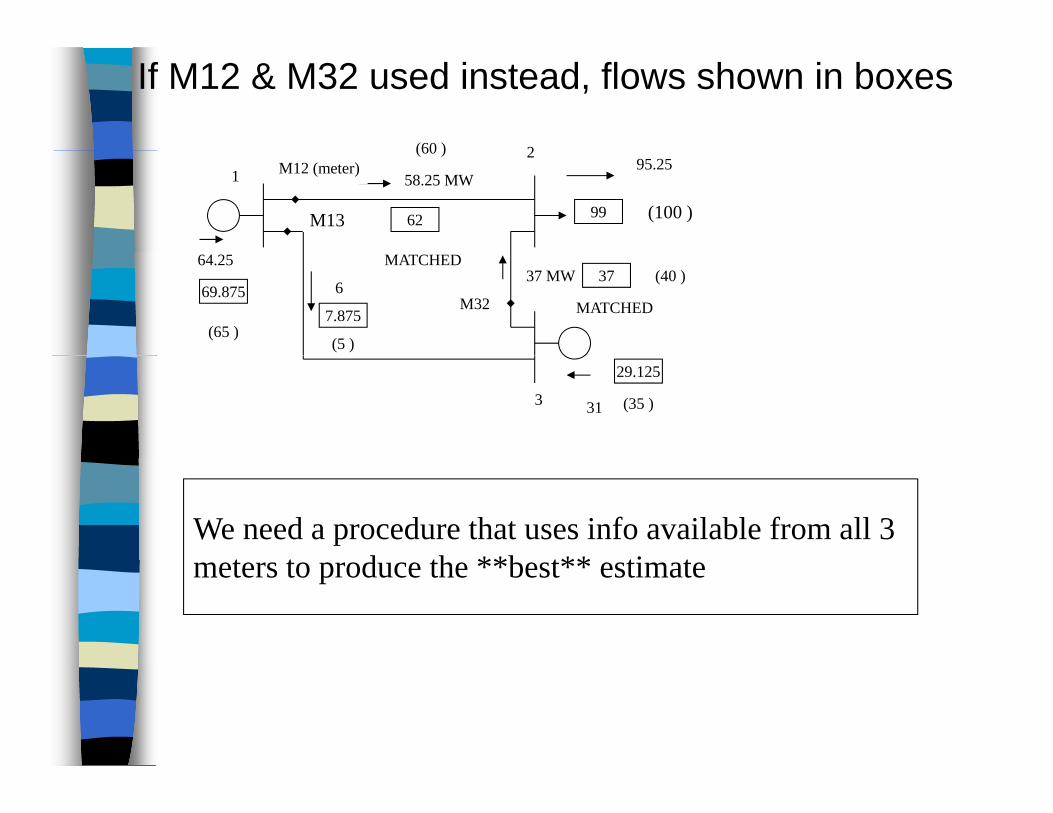
If M12 & M32 used instead, flows shown in boxes
2(60 )
1
(100 )
2
58.25 MW
M13
M12 (meter)
9962
95.25(60 )
64.2537 MW
M32
37 (40 )MATCHED
MATCHED69.875
(65 )
6
7.875
(5 )
313 (35 )
29.125
We need a procedure that uses info available from all 3 t t d th **b t** ti tmeters to produce the **best** estimate

Maximum Likelihood+
Xtrue
l r1-volts
Want to estimate the value of the 111
zz truemeas
Want to estimate the value of the voltage source xtrue
Note { mean value of Z meas}=Z true if Note { mean value of Z1meas}=Z1
true if 1has zero mean

Normal Distribution with Zero Mean
Probability density function (PDF) is normal
zz truemeas11 (random error)
Probability density function (PDF) is normal
-exp1 )( 2
2
i
deviation standard
2p
2)(
21
2
11
PDF( )variance1 PDF()
Small 1 better measurement quality
10

So the PDF of Z1meas
2
1
2
1 211exp
21 )(
)( zz truemeasPDF
If r1
is know, then
2
)( xmeas
2
11 21
1exp
21 )(
)(r
zmeas
Want to find an estimate that maximizes the probability density that the observed measurement Z1
meas would occur

Therefore, we can
2
meas1
1
)PDF( log max z
xz meas
x
2
1
1
21
1
2log-max r
zx
2
11
rx
z meas
or
2
121max r
x
2
11
min rx
z meas
or
2
12min
x

Find xest by
rx
z meas2
011
x 2
1
02
zrx measest
or
11
State EstimationR l ti tReal-time measurements:
* MW, MVAR line flows* MW, MVAR bus injections* B lt it d* Bus voltage magnitudes* Line currents
D t EData Errors:* Failures in measuring or telemetry equipment* Errors in the measuring instruments* N i i th i ti t* Noise in the communication system* Delays in the data transmission
B i SBasic Steps:* Hypothesize a system model* Estimate the state variables* Detect the presence of bad data* Identify the bad data
Benefits of State Estimation:
Can reduce # of transducers and remote terminal units.
Bad data detection and identification.

State Estimation: Problem Formulation
STATIC STATE ESTIMATOR
Measurements z
Structure SEstimated system state &
model
(Computer Algorithms)Parameter Values p
Notation: t: continuous, tn: discrete (n=1,2,…)Unknown independent variables:
• Node injection Complex, nonstationary, environmentally dependentvector-valued stochastic process
ty~
• True structure Binary type stochastic process
t~
• True parameter values Line, transformer, meter data
t~

Unknown State Variables: Node VoltagesThe power flow equation now reads
K titi
tttt xfy
~~~_~
,,
Known quantities: Measurements
line flows bus injections voltage magnitudes
tn_
line flows, bus injections, voltage magnitudes Pseudo measurements
nontelemetered information on line flows, injections,, j ,voltages.
Parameter values ntp_
note that: Parameter value error
S
nznn tvttp~
__
ntzv
_ S Structure ntS
_
nnn ttt CS___
(error)
Model for measurement:
)()()(),(),()(__~~~~~ tttttt nnznnnnbvxhz
Where : Error due to meter constraints, difference
)(tnzvbetween [ ] and the actual power system, meter nonlinearities, miscalibration noises A/D conversion errors
)(_ tnz
_h
noises, A/D conversion errors, communication noises, etc.
: bad data due to transient swings, major )(tnb g , jmeter-communication failures.
)(_ tn

Static State Estimator:1 Hypothesize model: determine1. Hypothesize model: determine
))(),(,()(____ tt nnxhxh
p
s
__
__
and the measurement error covariance matrix__
)()( tt TER
2. State estimate value of which minimizes the
)()(__tvtv nznzER
:)(^
tx n xresidual _ _
))(()()(___txhtzt nnn
3. Detection: Test to decide if bad data or structural error exist
___
4. Identification:Test to decide which measurements or structural data are incorrect

Four Basic Operations of Static State EstimationSCADA
Measurement z_ParameterStructure s
_
p_
Hypothesize modelassume vbc p,,
______000
obtain Rxh ),(__
E i i Fi d ( i i i )^ Modify
Estimation: Find (minimize )x_
_
Detection: Check assumptionsb i if i
Y
yinput
, by testing if is small enoughEND No
_00
____, bc
Identification: Logic to determine location of bad data & structural error

Estimation:Weighted least Square (WLS)Algorithm
M t M d lMeasurement Model(sym)
)(
z
_~__~
RE Tz
z
vv
bvxhz
Suppose no bad data b=0, then~
z~
vv
zvxhz~~
)(
To minimize the residual We minimize
__
)(__~~xhz
)]([)]([)(___
1
____xhzxhzx RJ T

Why: Assume that the n components of are jointlyGaussian, then the joint probability density function is given by
y~
function is given by
)()(1exp1)( 11/22/ yyRyyf mmy T
)()(
2p
R)(det)2()(
__
__
1/22/_~
yyyyyf mmy n
where R is the covariance matrix and is the mean ofym
~
y~
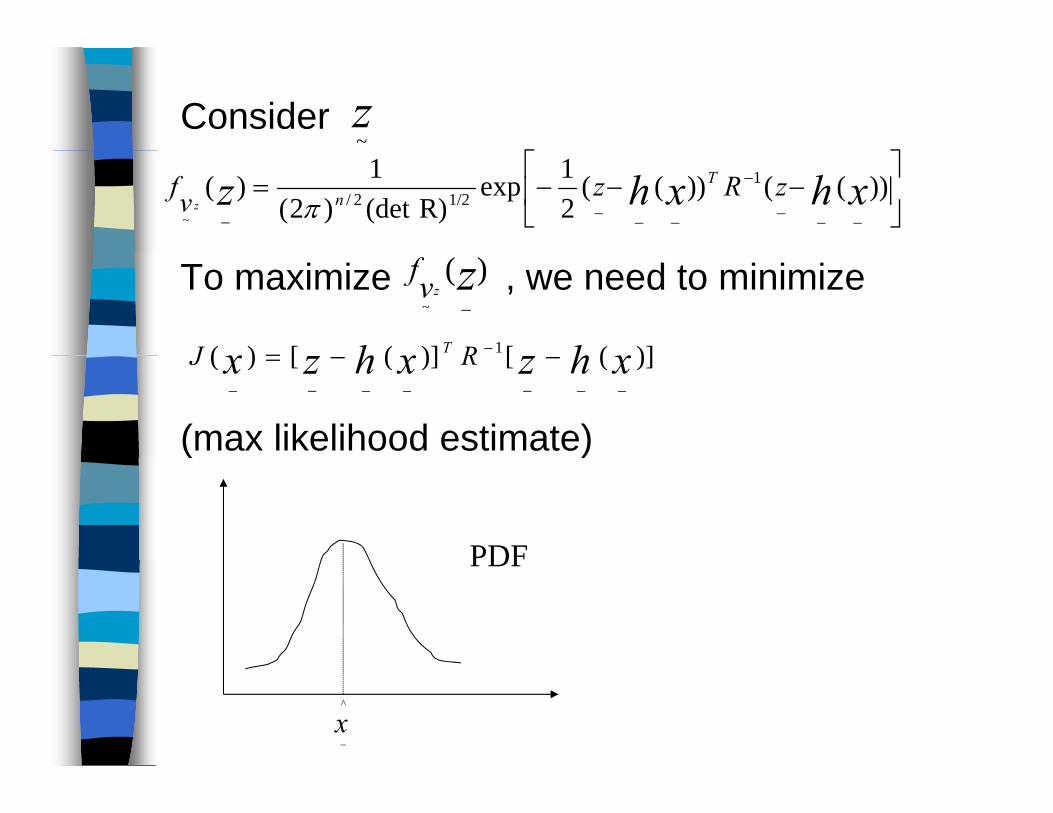
Consider
z~
))(())((
21exp
R) (det)2(1)(
___
1
___1/22/_~
xhxhz zRzvfT
nz
To maximize , we need to minimize)(_~zzvf
)]([)]([)( 1 xhxhx RJ T
(max likelihood estimate)
)]([)]([)(_______xhzxhzx RJ
( )
PDFPDF
x^
_

0))((2)(
_
_1
____
_
hxh
xhzxx
RJ
T
0))((
H where0))((2
___
1
_
_1
___
xhzxh
xhz
RH
HR
T
T
Necessary condition for optimality
(1)0)()(2)(
1_
xhzxx
RHJ
T
T
Where is the Jacobian
(1) 0)()(2____
_
xhzxx
RH
xh_H
To solve (1), the following iterative algorithm is usedx_
___
1
__1_(3) )]([)(][ xhzRxHxxG ii
Tiii
Note that if i= 1 converges to then_
^
_1_, xxx ii
x^xNote that if , i= 1,…,converges to thenix_ _x
)2( 0)]([___
1 xhzRH T

Question: How to choose Gi (Gain matrix)^^
Suppose , then (3&4) yields
seriesTaylor (4)))(()()(________ iii xxxHxhxh
)()(^xHxH i ____
))(()(_
^
___
1
__ iiiT xxxHRxH
C ith (3)
))(()(___
1
__ iiT xhzRxH
Compare with (3)
)()( 1ii
T
ixRx HHG
(Information matrix)
__
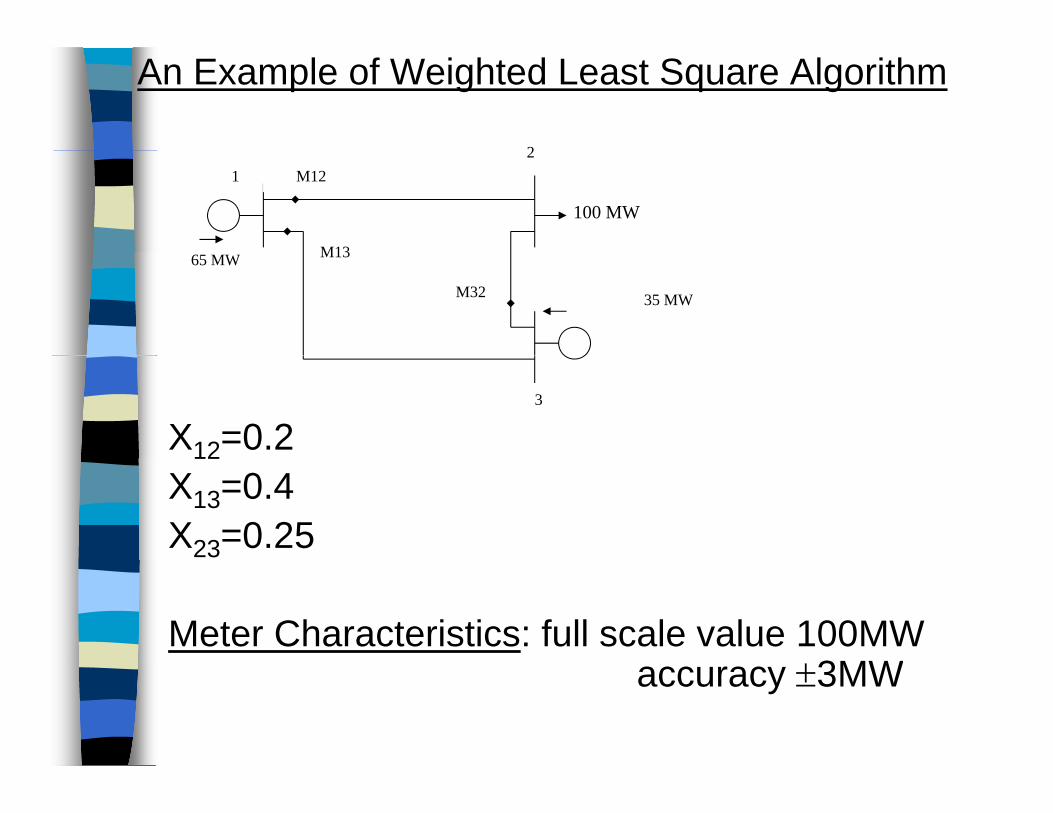
An Example of Weighted Least Square Algorithm
21
100 MW
2
M13
M12
35 MW
65 MW M13
M32
X12=0.23
12X13=0.4X23=0.25
Meter Characteristics: full scale value 100MW 3MWaccuracy 3MW

Interpretation: Normal distribution density N(0,1)
Prob{ 3 3} = 0 99
Mean-3-3MW
3+3MW
Prob{-3 3} = 0.99
The meter will give a reading within interval forg g 99% of the time.
= 1MW = 0.01 (p.u.)

DC Load Flow
11313
211212
BzBz
BBB
1121212
23232
0
-
z
Bz
BB
232
13
32
13
5- 5
- 0
0
zz
2
1
MatrixCovariance4- 0 0 2.5
1010
4-
4-
2
13
2
12
0 0
0 0
0 0
0 0
R
Matrix Covariance
10 10
4-2
32
13
0 0 0 0

WLS Estimatef (1)0))((1 hRHT from eq(1)0))((
___
1 xhzRHT
111^
0zx RHHRH TT
4
41
4
4
__
0.060.62
0 0
0 0
4-05-0 2.5 5
0 2.55- 5
0 0
0 0
4-05-0 2.5 5
1010
1010
^
1
44
028571.0
0.37 0 04- 0 5-
4- 0 0 04- 0 5-
10 10
R id l
^
2
094286.0
Residual
][][),(^
1^
21 xHzxHz RJ T
2.14 ______
Reading:Reading:
Power Generation, Operation & ControlJohn Wiley & Sons A WoodJohn Wiley & Sons, A. Wood, B. Wollenberg, 1996, Chapter 12.

Network Observability (Wu and Monticelli)
DC load flowLine flows )(
__
θθ
θBp
Bf
Line flows
Let Y=diag{Bij}, then the vector of line flow
)( jiijijθθBf
measurements can be written as
The true line flows are given by
__θHz
T θYAf The true line flows are given by
Where Y=diag{Bij}
__θYAf
j
H, A include the datum node (unreduced)

A network is said to be observable if any flow in the network can be observed by some sort of i di i i h findication in the set of measurements.
In other words, whenever there is any nonzeroIn other words, whenever there is any nonzero flow in the network, at least one of the measurements should be nonzero.

Definition: A network is said to be observableif for all such that the line flows
_
00 fz
0__ Hz
___
____
0 TYAf
Any state for whichIs called an unobservable state .
_
*
_
T
_
*
_0A ,0 H*
_
For an unobservable state *Let then branch (i, j) is an unobservable branch.
_0 ,A *
ij*
_
T*
_ if
unobservable branch.

Q:How to check the observability of the t k?network?
We will show that
The network is observable if and only if has a full rank, where is obtained from H by deleting any column.
_
H_
H
Why: (A:unreduced)____10 AT
where any real number and = [1,1,…1]T
(1) If th t k i b bl th
_1
(1) If the network is observable, then
_____00 TAHz

So we obtain(i (th l i ))
10____
H
(i.e., (the column sum is zero)) __01 H
Define H= To show has a full rank _H
_h
_H
___
Now suppose
00____
H
0_
_
_
_H
Let then
_
_
_ 0
0
0_
__0
or
H
Hence is of full rank.
0__
or
_H

(2) On the other hand, if is of full rank, and, then
H_
0___
HZ
_
k
k
k
hH
hHhH
__
_
_
_
_
__
_
0
Now k
TT
hHHH_
_1
___
_
__
Nowthe column sum of H is always equal to zero (why) 1 ( y)
hence 0
1
1
_
_
hH
or
1
1
__
_1
__
__
_
hHHH
hHTT
ityobservabil
therefore,
01___
_
_
__
AT
k
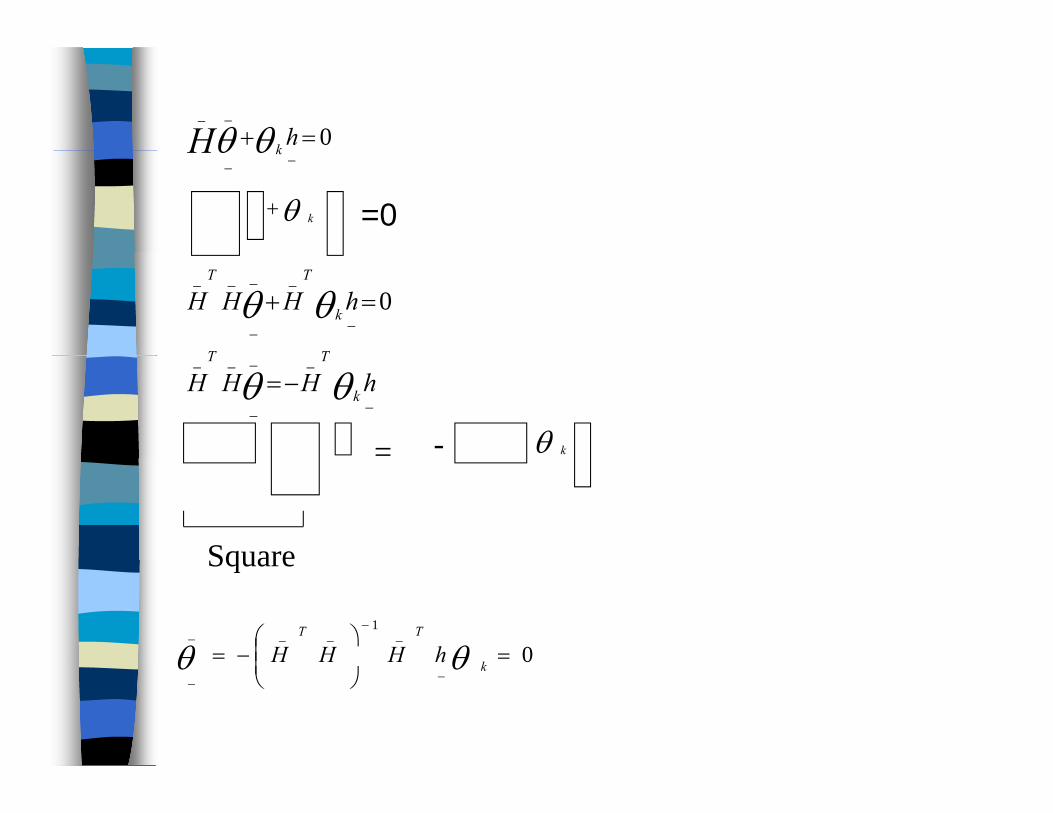
0__
hkH __kH
=0 k
_
__
_
__0hHHH
TT
k
TT
_
__
_
__hHHH k
TT
= - k
SquareSquare
0_
1___
k
TT
hHHH__
k

ExampleLi 1 21
Line 4Li 2
Line 1 2
Line 2
iLine 34 3
10011001 114
zz
011001101001
4
3
2
32
23
41z
zzz
Node Incidence Matrix
011000111001
32
A
11000110

Delete one column of H
00
00
11
_
H
1
11
100H
Rank = 2H_
is not of full rank H_
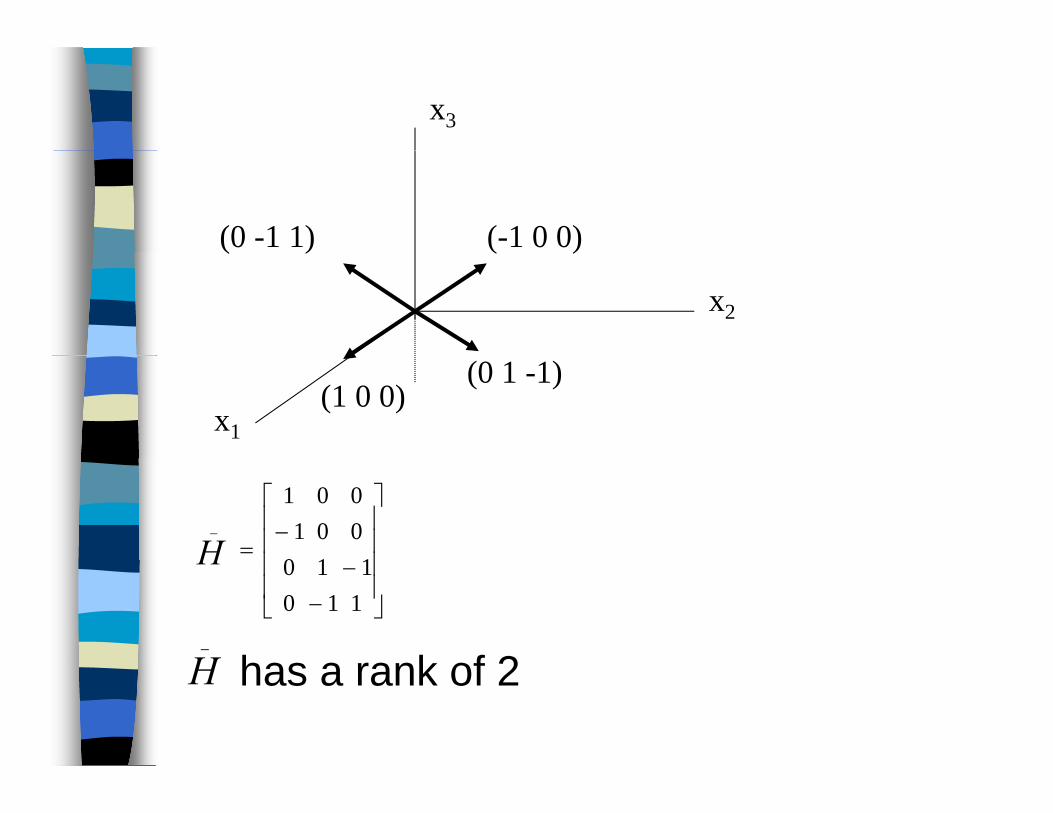
x3
(-1 0 0)(0 -1 1)
x2
( )( )
x1(1 0 0)
(0 1 -1)
1
00
100
01
1_
H
has a rank of 2
1
11
100H
H_
has a rank of 2H

*
_
*
*
TA
*
3*
2*
1*
34
23
12
10011100
01100011
*
*
*
Now suppose (zero measurements)
4*
14
1001*
_
* 0HThen , and Line flows
_0*
4*
1 0*
3*
2
0*
*
3*
2*
23
2*
1*
12
Unobservable branches
0*
*
4*
1*
14
4*
3*
34
Unobservable state: 1= 4 , 2 = 3
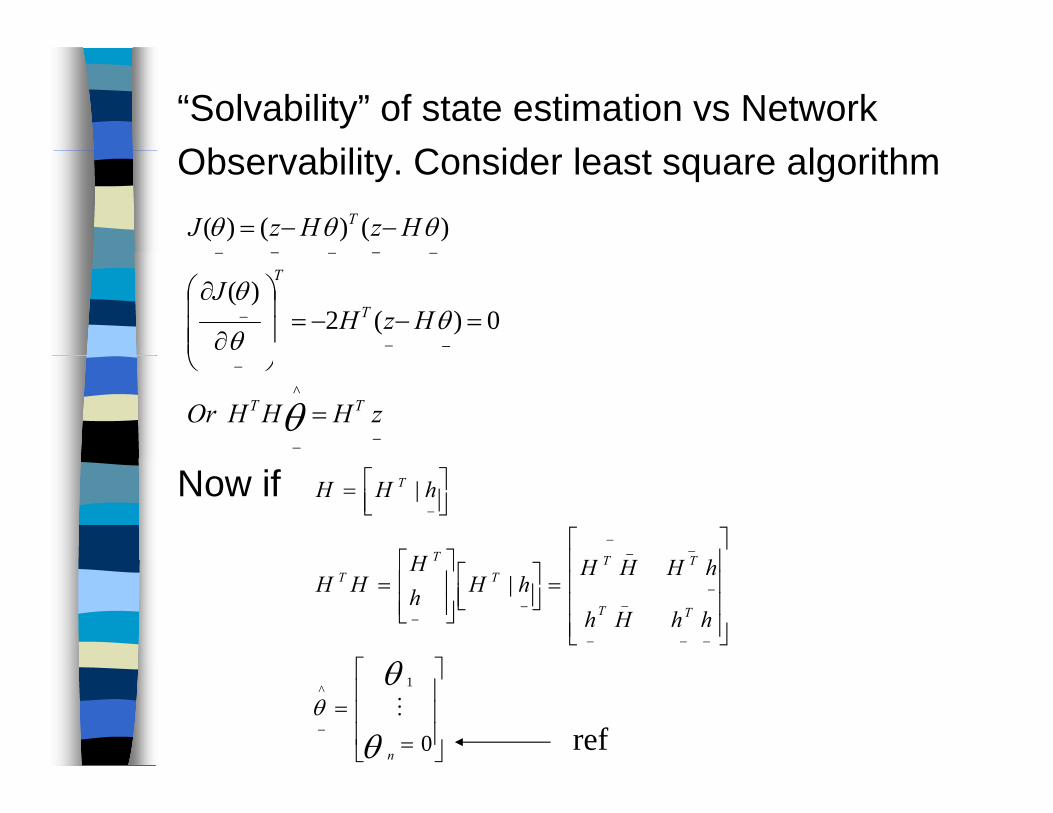
“Solvability” of state estimation vs Network Ob bilit C id l t l ithObservability. Consider least square algorithm
)()()( HzHzJ T
__
_
_____
0)(2)(
HzHJ
T
T
__
^
_
zHHHOr TT
Now if
|
__
_
_
TTT
T
hHHHH
hHH
|
__
_
_
__
_
TT
TTT
TT
hhHh
hHHHhHh
HHH
0
1^
_
n
ref

0
1 _
_
_
___
hhh
hHHHH
TT
TT
T H
1
0
_
_
__
___
_
zHHH
hhHh
T
TT
TT
1
1
_
_
_
__
_
__
_
_
zHHH
zhHhTT
TT
Now suppose the network is observable, then is of full rank, therefore exists, and
_
H1
__
HH
T
zHHHT
_
_1
__
_1
is solved uniquely. (Solvability)* Pseudo measurements are often used for
estimation of unobservable states.

Identification of Bad DataWeighted Least Square
T
___
1
___
__
T
xhzRxhz
rr
J
T
The WLS estimate satisfies
2
1
m
i i
ir
x
The WLS estimate satisfies
2
_
___
1
xxhzRH
xxddJ T
x_
J bithih
2 __
1 0__
hH
rRHd
xx
T
now
Jacobiantheis where
____
_
_
_
vxhz
xH d
1
00
_
b
dIth meter is bad
___bvv z
0
d: size of bad data

Define the state estimation errorxxx
Suppose is small, andx
___
x_
xhxh H
1
_____
& ,Then 0
T xhvxhRH
xhxh xH
1
,______,
0
0
T hh
xhvxhRH
11
______
1
_0
T
T xhvHxhRH x
Also, for ,covariance matrix 11where
x
T HRHzvv
_
_
(why?) E__
x
T
Xx

Now for the residual vectorzzr___
xhvxh____
xhvHxh x_____
vvRHxH T
_
1
_
_
vRHxHI T 1
_
_
Where the residual sensitivity matrixvr W
__
T 1
RH TxHIW 1

For , the residual covariancezvv__
rE rrT
WRxHR
rE
H
rrT
(why?)
__
Now define the diagonal matrix rdiagD
*Weighted residualg
1
* Normalized residual
rRrw
_
1
_
Normalized residual
rDrN
_
1
_

Then for , covarianceszvv__
rr UwwET
W__
AndRR r 11
rr UNE N
T
DD r
N
11
__
Note that diagonal elements of UN are all equal to 1to 1.
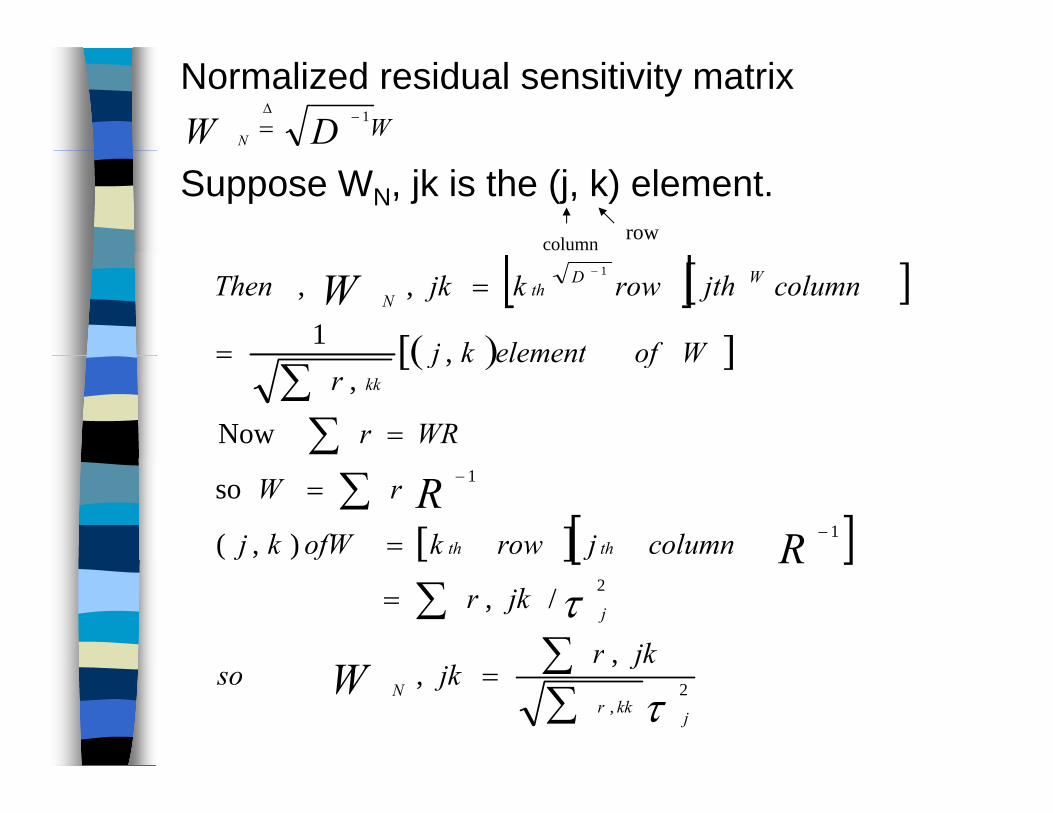
Normalized residual sensitivity matrix1WDW N
Suppose WN, jk is the (j, k) element.
column row
1
, ,1 WD
thN
Wofelementkj
columnjthrowkjkThen W
Now
,, kk
WRr
Wofelementkjr
1
1
),(
so
thth columnjrowkofWkj
rW
RR
2
,
/, j
jkr
jkrR
2,
,,
jkkr
N
jkjkso W

zvvxx___
and with
SHOWWR-1W=R-1W
zJ vWRvx T
Z
1
_
(why?)
If is normal, then has Chi-squared distribution with K = m – n degrees of freedom (m is # of measurements,
Z ____ zv
_
xJ_
g ( ,n is # of states).As K become large (K>>30), the standardized
d i blrandom variables
KJ x
become zero mean and normal N(0,1).
K2

Bad data detection
HypothesesH : no bad data or structural errorsH0 : no bad data or structural errorsH1 : H0 is not true
Let Pe : prob. of rejecting H0 when H0 is actually tr e (“False alarm”)true (“False alarm”)
Pd : prob. of accepting H1 when H1 is true(d t ti )(detection)

t t
1. - test
xJ_
Accept H0 if Reject H0 (accept H1) otherwise
1
1Reject H0 (accept H1), otherwise when is normal, K is large and H0
i t th i N(0 1) S 1 65zv
_
1
is true, then is N(0,1). So = 1.65 corresponds to Pe = 0.005
1

2. RN – testA t H if
Accept H0 if Reject H0 otherwise
mkkNr ,...,1, ,
3 R – test3. Rw testAccept H0 isR j t H th i
mkkwr ,...,2,1, ,
Reject H0 otherwise

For single or multiple non-interacting Bad data
Ordered residual search:weighted (normalized) residuals
Nrrweighted (normalized) residuals
put into a descending order of magnitude.The measurement z corresponding to the
Nw rr__
The measurement zi corresponding to the largest residual rw
max (rnmax) is removed first,
etcetc.Grouped residual search:
the p largest residuals in or removedr Nrthe p largest residuals in or removed simultaneously and then put back one after another until bad data is detected.
wr_
Nr_
References[1] “Bad Data Analysis for Power System State Estimation,” E. Handschin et al.IEEE Trans. Power Apparatus and Systems, Mar/April 1975, pp. 329-337.[2] A M ti lli “El t i P S t St t[2] A, Monticelli, “Electric Power System State Estimation,” Proceedings of the IEEE, Feb. 2000, pp. 262-282.

















