Assigned Proposal Number:_______ Strategic University Research Partnership Proposal for FY2011 Due Date: October 1, 2010, by 4 PM PDT 1. Title of Proposal Design and Implementation of Autonomous Reconfigurable Wheels for Planetary Rovers 2. JPL Principal Investigator Name – Section Dr. Ashley W. Stroupe, Section 3478 Advanced Robotic Controls [email protected]3. Co-Investigator(s) (University and JPL Co-Is) Name – Affiliation – Email Olivier L. de Weck, Ph.D., dipl. Ing. Professor of Aeronautics and Astronautics Massachusetts Institute of Technology (MIT) [email protected]Dr. Afreen Siddiqi Research Scientist Engineering Systems Division MIT [email protected]4. Total Budget Request for FY11 New Proposal [ x ] Successor Proposal [ ] Budget Request: $100,000 5. Student Participants Name – Affiliation – academic level – Email Brittany Baker – MIT Department of Aeronautics and Astronautics, 2 nd year graduate student, [email protected]6. Topic Area— Place a “1” next to your primary area and a “2” next to your secondary (optional) area. Tip: Delete unused topical areas to recoup space. Primary Area In Situ Planetary Exploration Systems [1] Atmospheric, surface and subsurface mobility Secondary Areas Survivable Systems for Extreme Environments [2] Reliability systems for extended lifetimes Mission System Software and Avionics [2] Autonomous Operations 7. Objectives— State clearly and concisely the objectives of your work and the expected deliverables. One of the major mobility challenges on the MER rovers Spirit and Opportunity were uncertain terrain and soil conditions such as sand dunes. These caused both rovers to be stuck – for varying amounts of time - due to excessive sinkage and slippage (see Fig. 1). The JPL MER flight operations team spent a substantial amount of effort to extricate the rovers from their predicament as well as a number of sols were lost for science. One of the potential solutions to this problem on future rovers is the use of autonomous and reconfigurable wheels that can sense and adapt to the local terrain and soil conditions (see 1
Transcript
Assigned Proposal Number:_______
Strategic University Research Partnership Proposal for FY2011Due Date: October 1, 2010, by 4 PM PDT
1. Title of ProposalDesign and Implementation of Autonomous Reconfigurable Wheels for Planetary Rovers
2. JPL Principal Investigator Name – SectionDr. Ashley W. Stroupe, Section 3478Advanced Robotic Controls [email protected]
3. Co-Investigator(s) (University and JPL Co-Is) Name – Affiliation – Email
Olivier L. de Weck, Ph.D., dipl. Ing.Professor of Aeronautics and AstronauticsMassachusetts Institute of Technology (MIT) [email protected]
Dr. Afreen SiddiqiResearch ScientistEngineering Systems [email protected]
4. Total Budget Request for FY11New Proposal [ x ] Successor Proposal [ ] Budget Request: $100,000
5. Student ParticipantsName – Affiliation – academic level – EmailBrittany Baker – MIT Department of Aeronautics and Astronautics, 2nd year graduate student, [email protected]
6. Topic Area— Place a “1” next to your primary area and a “2” next to your secondary (optional) area. Tip: Delete unused topical areas to recoup space.Primary Area
In Situ Planetary Exploration Systems[1] Atmospheric, surface and subsurface mobility
Secondary Areas
Survivable Systems for Extreme Environments[2] Reliability systems for extended lifetimesMission System Software and Avionics[2] Autonomous Operations
7. Objectives— State clearly and concisely the objectives of your work and the expected deliverables.One of the major mobility challenges on the MER rovers Spirit and Opportunity were uncertain terrain and soil conditions such as sand dunes. These caused both rovers to be stuck – for varying amounts of time - due to excessive sinkage and slippage (see Fig. 1). The JPL MER flight operations team spent a substantial amount of effort to extricate the rovers from their predicament as well as a number of sols were lost for science. One of the potential solutions to this problem on future rovers is the use of autonomous and reconfigurable wheels that can sense and adapt to the local terrain and soil conditions (see Fig.2). The objectives of this project are to: (1) build and integrate reconfigurable wheels onto an existing rover testbed, (2) synthesize and optimize three different control architectures to autonomously reconfigure the wheels, (3) demonstrate and assess the effectiveness of using reconfigurable wheels while traversing a simulated Martian environment and (4) compare the three control strategies in terms of their stability, energy use and likelihood of excessive slippage and sinkage.
8. Technical Approach— Describe your plan to achieve your objectives. Provide specific tasks, milestones, and responsibilities.
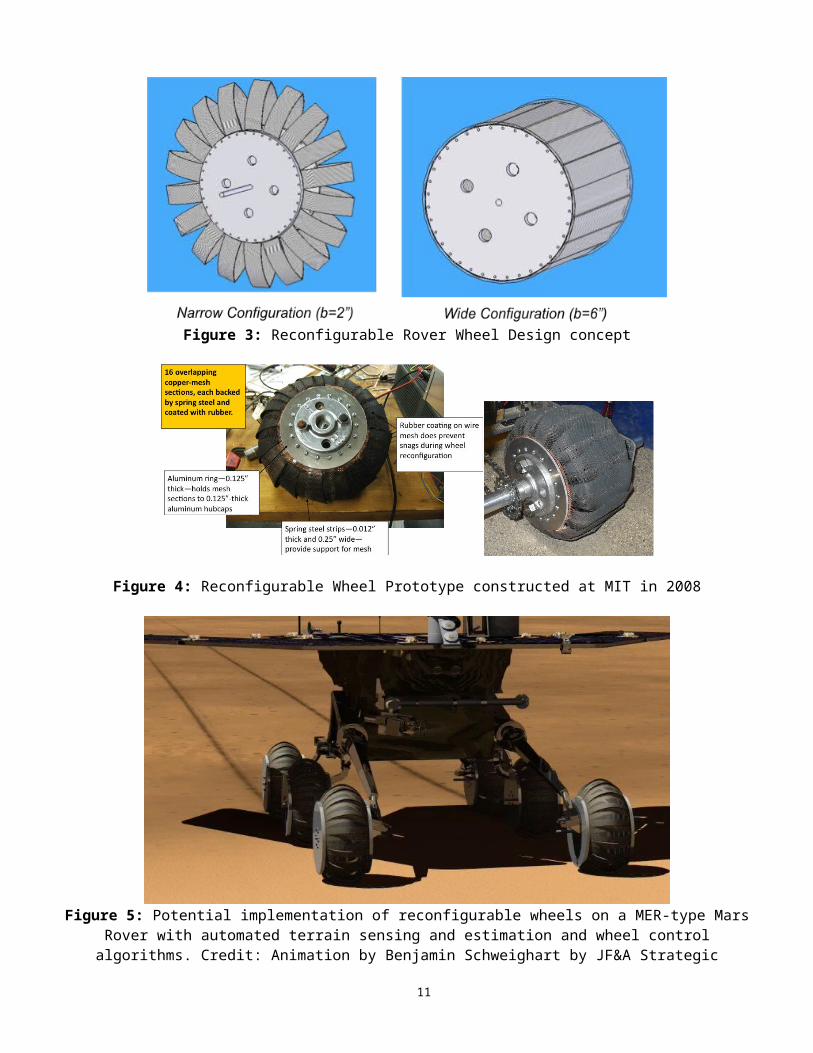
An early generation of reconfigurable wheels that can change both width and diameter as a function of soil conditions was prototyped at MIT under a 16.62X Experimental Design Project class in 2008/9 (see Fig. 3). The wheel features a set of partially overlapping mesh segments an axial linear actuator and a pre-loaded spring mechanism (see Fig. 4). On soft terrain the wheel moves to its widest position, providing the largest
possible contact area, drawbar pull and minimal sinkage similar to the use of balloon tires on Earth. On hard terrain the wheels become narrow and minimize friction similar to a racing bicycle wheel on a paved road. The prototype wheel design was tested in 2008 on a specially designed test track with three different simulated soil types and the consumed drive power, sinkage and drawbar pull were experimentally determined for different driving speeds and sprung mass loading conditions [Ref. 1]. The results were extremely encouraging and showed that the concept is viable.
In parallel we developed a control architecture and computer simulation to show the potential benefits of reconfigurable wheels for a set of simulated planetary rover traverses [Ref. 2]. Our long-term objective is to prove the viability of reconfigurable wheels on a Mars-class planetary rover (see Fig. 5). The objective of this SURP research project is to now take the idea a step further by building several reconfigurable wheels, implementing them on a small scale existing rover testbed (ARC K-10) available at MIT and by then comparing different control schemes in terms of energy consumption, safety (to avoid excessive sinkage) and robustness under simulated Martian terrain and soil condition scenarios, potentially using JPL’s outdoor Mars Yard and potentially participating in the 2011 Desert RATS Campaign.
Milestone 1: Kickoff Meeting at JPL (January 2011)
Technical Approach for Objective 1 (build and integrate reconfigurable wheels onto rover testbed)
The technical approach for objective 1 is divided into four main steps. 1. Wheel redesign. Three improvements need to be made to the current reconfigurable wheel design
(Fig. 4). The linear actuator that provides the mechanical movement to change the wheel shape needs better protection from soil and dust particles. The wire mesh pieces need to be connected on the ends to make the assembly of the wheel easier. A protective coating or shield needs to be added to the wire mesh pieces to prevent soil particles from getting inside the wheel and to make the wheel more resistant to wear. The redesign will be completed by MIT personnel with input from JPL personnel. It is expected that the re-design will take approximately two months to complete.
2. Wheel fabrication. Between 4-6 reconfigurable wheels will need to be built (including a spare). All fabrication and assembly will be completed by MIT in the Aero/Astro machine shop following OSHA safety guidelines. We will be using NASA approved materials wherever possible, but the final assembly will not be space-qualified. Estimated build time for all the wheels is two months following design in step 1.1.
3. Obtain an actual rover platform. University and JPL personnel will work together to decide what rover platform would be most appropriate and most easily obtainable. We have already identified a potential candidate available at MIT and Aurora Flight Sciences, which is the ARC K-10 test rover.
4. Integration. Install wheels on the rover platform. This step will likely require some adjustments to both the wheels and potentially the rover interface. While the exact details of the integration plan will need to be worked out after the rover platform is chosen, in general, a support arm and axle that is strong enough to support each wheel will need to be constructed and installed. The number of drive motors for the wheels and their appropriate size and rating will need to be determined. It will also need to be determined how much power the drive motors will require and what power source will be used. Additionally, all necessary instrumentation (e.g. torque balance, optical encoder to measure wheel rotation) for the controllers will also need to be installed. MIT personnel will perform the actual hardware installation but JPL personnel will be consulted on all major decisions relating to wheel integration. In case we run into difficulties the backup plan is to only implement a subset of the rover wheels in the reconfigurable configuration and leave the other wheels as regular wheels. It is estimated that this step will take approximately six weeks to complete.
Technical Approach for Objective 2 (synthesize and optimize three different control architectures)
There are three design architectures for the wheel controllers that are of particular interest for this project (see below). A controller will need to be synthesized for each architecture. University and JPL personnel will
2
work together to finalize the design for these controllers (prototyping of controllers will be in Matlab/Simulink with a compatible digital signal processing (DSP) target processor). Actual implementation of the controllers will be done by MIT personnel after verification by JPL personnel. It is estimated that each controller will take approximately two months to design and build and test through simulation. However, the controllers can be developed in parallel as we work on the wheel hardware in step 1. Details regarding each of the control options are listed below:
1. Terry and Minor [Ref. 4] propose a specific parameter, wheel slip velocity, to be used in measuring traction loss. They develop a modified Kalman Filter based on system disturbances and a model of the DC motor used to power the wheel, which they use to estimate wheel slip velocity. Terry and Minor have successfully demonstrated the use of their techniques on a single axis mobile robot. One potential option for a controller would be to test whether Terry and Minor’s wheel slip velocity concept could be effective for reconfigurable wheels.
2. Iagnemma, Kang, Shibly, and Dubowsky [Ref. 5] developed a way to identify key terrain parameters using on-board sensors such as force sensors, IMUs, and tachometers. These terrain parameters combined with classical terramechanics equations [Ref. 3] can be used to estimate the amount of drawbar pull needed to successfully navigate that particular soil type. The appropriate wheel configuration can then be determined based on the estimates of how much drawbar pull is needed.
3. MIT/JPL will also develop and test a new technique for wheel control. In order to ensure that the rover doesn’t get stuck, drawbar pull must remain positive, therefore an ideal controller would decide what configuration is needed based on drawbar pull. However, measuring drawbar pull while the rover is in motion is very difficult - which is why others have proposed techniques to make alternative measurements. Drawbar pull and torque are both functions of wheel width, wheel diameter, and soil properties (see Fig. 2). Within a given soil type, the soil properties can be considered constant – or similar- and theoretical values for both drawbar pull and torque could be solved for if soil properties were known. Since the dependent parameters (wheel size, soil properties) for torque and drawbar can be derived for a given soil type and since both drawbar pull and torque depend on the same parameters, we believe it should be possible to develop a controller based upon only wheel torque, optical encoder and accelerometer measurements and soil type estimation. Wheel torque can be determined based on voltage and current measurements of the drive motors. The details of this new controller will be worked out as part of this SURP project.
Milestone 2: A mid-project review would be held at the mid-point after 6 months at MIT (ca. June 2011)
Technical Approach for Objective 3 (demonstrate reconfigurable wheels on simulated terrain)
Once the design, fabrication, and integration phases are complete, testing will be conducted in a simulated Martian environment. We will verify and assess the feasibility of using reconfigurable wheels.
1. Laboratory Testing. The rover will be subjected to a series of test scenarios with varying levels of difficulty (e.g. softer soils and increasing levels of inclination or sand depth). Testing will consist of a go/no-go traversal experiment for each of the controllers in each of the testing scenarios. The time required for the rover to navigate each scenario will be recorded along with the amount of power consumed. The initial tests will be conducted at MIT and in JPL’s Mars Yard. Laboratory Testing will take approximately two months to conduct.
2. Field Testing. The preferred field site would be the Arizona desert as part of NASA’s 2011 RATS team. However, other test sites would also be possibilities if alternative options are needed. MIT and JPL personnel will conduct all testing jointly. Testing will take approximately three weeks to one month to complete.
Technical Approach for Objective 4 (data post-processing and final report)
1. Once testing is complete it is estimated that it will take MIT personnel about 2 months to analyze and document test results. Performance criteria will include traversability – whether or not the rover
3
was able to successfully navigate each test scenario, the amount of power consumed for each controller in each test scenario, and the amount of time it takes the rover to maneuver through each test scenario. Charts and graphs of the data will be produced and statistical analysis techniques will be employed to analyze and compare the performance of each of the different controllers.
2. A final report detailing the results and conclusions of the testing will be supplied to JPL and will be revised based on input from JPL personnel.
Milestone 3: A final review will be held at JPL at the end of the project (Dec 2011)
A detailed project plan with milestones and task dependencies is shown in Figure 6.
9. Successor Proposals Only— Describe the accomplishments of the predecessor award. N/A
10. Innovative Features— Describe the new and original features of the proposed work.Three aspects of this project represent original work.
1. First, reconfigurable wheels have never been integrated onto an actual rover platform before as far as we know. Finding a successful way to do this will provide new analysis capability that can improve current rover designs, provide new design options and expand rover capabilities.
2. Second, a new controller algorithm will explore the mathematical relationships between torque and drawbar pull. Investigating this relationship will provide valuable insight into better understanding wheel-soil interactions and provide a new option for a reconfigurable wheel controller design.
3. Finally, while several controllers for traction control have been successfully demonstrated by different research groups, no direct comparison of these controllers has ever been made. This project will test three controllers under the same test conditions in order to evaluate their relative effectiveness and determine which method would be best suited for implementation on future rovers.
11. Team Strengths— Describe the strengths each member of the team brings to the proposed effort.
Professor Olivier de Weck – has partnered with JPL for a number of exploration projects since 2001, primarily with section 312. He pioneered the idea of reconfigurable rover wheels with Dr. Siddiqi and worked with his students to design, build, and test the first prototype. Additionally, Professor de Weck is a leading expert in developing “changeable systems” for use in space applications.
Dr. Afreen Siddiqi – is a research scientist at MIT and obtained her PhD in 2007 for research on a theory of reconfigurability with applications to space systems. She has extensive industrial experience at National Instruments with control system design and DAQ instrumentation architecture.
Brittany Baker – is a hands-on masters student at MIT and already has extensive experience in the design and testing of reconfigurable wheels. Brittany also has a background in controls where she is currently a Teaching Assistant (TA) for the main 16.60 undergraduate feedback controls class and she will leverage this experience in the development of control algorithms.
Dr. Ashley Stroupe - has been a Staff Engineer at JPL since December 2003 after obtaining a PhD in robotics at CMU. She worked in flight operations for the Mars Exploration Rovers, building sequences for rover driving and operating the robotic arm as well as doing long-term planning for rover traverse. She is also working on the development of the flight mission Mars Science Laboratory (MSL), evaluating terrain near potential landing sites. She is ideally positioned to lead this effort on the JPL side.
We will also loosely collaborate with a related effort under a NASA Phase II SBIR between MIT and Aurora Flight Sciences Inc. (Cambridge office) led by Prof. Jeffrey Hoffman. The benefit of this collaboration will be access to the ARC K-10 rover testbed.
4
12. Exchange of personnel— Describe any plans to have work performed at JPL by university personnel or at the university by JPL personnel. Please indicate if a student summer internship will be requested if proposal is awarded and how that internship will forward the proposed effort.
A summer internship will not be requested if the proposal is awarded. All fabrication and hardware integration will be done at MIT. We expect that the MIT personnel will travel to JPL for the project kickoff meeting in January 2011 and that there will be regular teleconferences (bi-weekly or monthly) and informal progress reviews during the first 6 months. The JPL PI is invited to come to MIT for the mid-term review in June 2011 and to inspect the integrated rover at MIT during this visit. After initial laboratory testing is complete at MIT the rover will be shipped to JPL around July 2011 for further testing in the JPL Mars Yard. During this period the software and controllers will undergo troubleshooting and fine-tuning. We then expect to drive to Arizona or the 2011 Desert RATS campaign to test the rover in more realistic field conditions.The MIT team will return to Massachusetts after the test campaign and perform data-post-processing and writing of the final report. The team will then return to JPL in Dec 2011 to conduct the final review. An alternative is to conduct the final review as a video- or teleconference.
13. Significance and Impact of Results on JPL Missions and Programs—Indicate specific missions/programs or types of missions.
As space exploration has expanded to include more robotic missions to Mars, engineers have experienced multiple challenges of rovers getting stuck in the soft Martian soils, particularly sand. In 2005, the Mars rover Opportunity got stuck in a sandpit and the JPL flight operations team had to work for over a month to free all six wheels that were mired up to their rims in soft sand (see Fig.1). Most recently, in January of 2010 after spending months trying to free the rover Spirit from the soft sand inside a small crater, mission managers announced that it would continue to perform scientific functions but would be retired from roaming the planet’s surface. As planetary rovers become more advanced and as mission objectives demand greater surface mobility while exploring more challenging terrain, new techniques must be developed to prevent future rovers from getting stuck as frequently as Spirit and Opportunity did.
Motivated by the challenges with Spirit and Opportunity, a number of techniques are currently being investigated as ways to improve wheel traction and rover mobility. In 2006, MIT proposed the idea of using reconfigurable wheels to address this problem [2]. Terramechanic equations suggest that wheel sizes that tend to provide more drawbar pull (the net horizontal force acting on the wheel) also require more operating power. The latter is undesirable since more power consumption translates to more weight and higher costs. Hence a reconfigurable wheel could have a nominal shape that would minimize power, but be able to change shape to provide more drawbar pull when necessary. In 2008 we were able to successfully design and fabricate a reconfigurable wheel (Fig. 4). Drawbar pull and power measurements for the wheel were conducted in different soil types and experimental data supported the hypothesis that a reconfigurable wheel could provide drawbar pull and power efficiency values that are at least 10% better than a benchmark wheel design [1].
While this earlier study provided a proof of concept, there are still many open questions that need to be investigated to address the practicality of implementation. Therefore the purpose of this project is to assess the feasibility of integrating autonomous reconfigurable wheels on actual rovers. The outcomes of this project could be beneficial for any future planetary rover projects that JPL is involved with. An autonomous reconfigurable wheel could potentially provide new design options for future rovers. Mission objectives could be expanded if these designs would allow rovers to traverse new environments on planetary surfaces and thereby possibly collect new data or perform new types of experiments. Successful integration of reconfigurable wheels would help reduce risk of rovers being rendered immobile and subsequently the possibility of mission failure. Minimization of power consumption may also reduce the mass of rovers. Other benefits – but also potential downsides - may also be made apparent once the project is completed.14. Plans for Follow-on Funding— Provide a realistic assessment of future funding potential. Discuss how this proposal may enhance the probability of such funding.
5
If successful we would like to propose a follow-on project to the NASA STTR program (phase 1/phase 2) in the area of planetary surface mobility and reconfigurable systems design. We will also consider submitting proposals to DARPA in the are of agile systems/robotics to the DARPA Tactical Technology Office (TTO).
15. JPL Principal Investigator Signature
Name: Dr. Ashley Stroupe Signature:
16. JPL PI Division Manager (or designee) Signature
Name: Signature:
17. University Co-Investigator Signature
Name: Prof. Olivier L. de Weck Signature:
18. University Representative with Signature Authority, if required by university (signature may also be provided instead on a letter attached with university budget backup)
Name: Mr. Michael Corcoran, MITOffice of Sponsored Programs Signature:
6
19. Figures, Graphics, Tables, etc.(Please do not use "text-wrapping" when incorporating.)
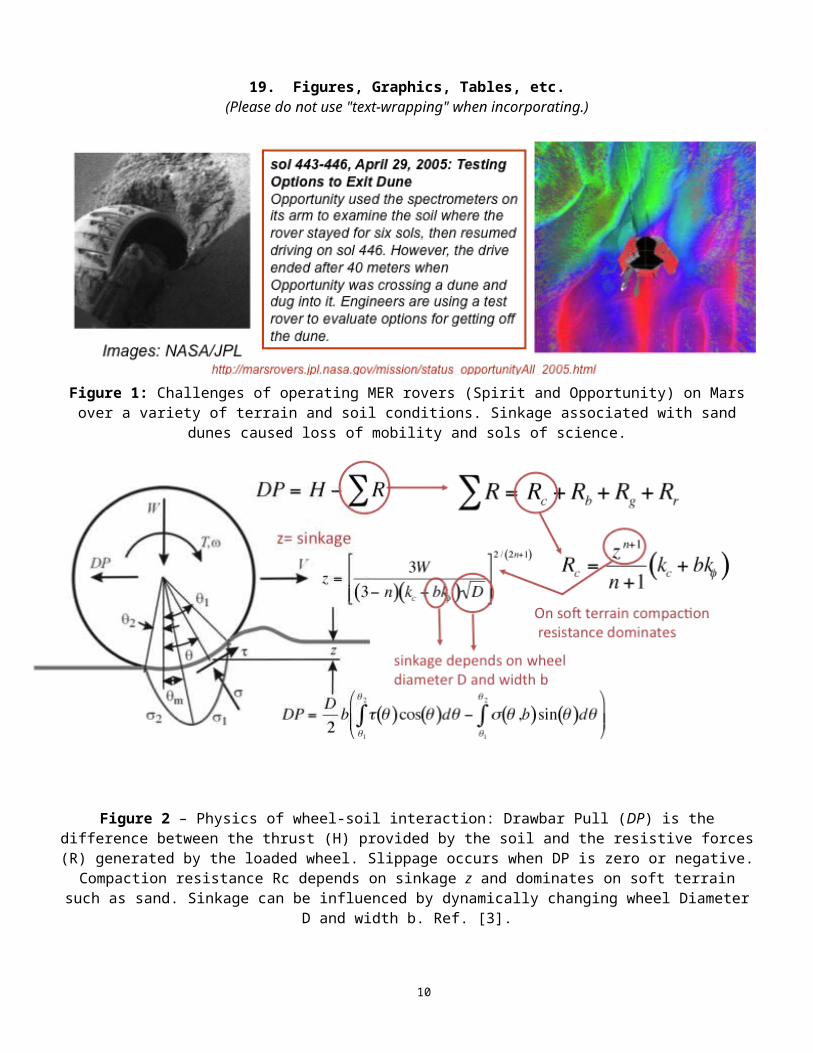
Figure 1: Challenges of operating MER rovers (Spirit and Opportunity) on Mars over a variety of terrain and soil conditions. Sinkage associated with sand dunes caused loss of mobility and sols of science.
Figure 2 – Physics of wheel-soil interaction: Drawbar Pull (DP) is the difference between the thrust (H) provided by the soil and the resistive forces (R) generated by the loaded wheel. Slippage occurs when DP is zero or negative. Compaction resistance Rc depends on sinkage z and dominates on soft terrain such as
sand. Sinkage can be influenced by dynamically changing wheel Diameter D and width b. Ref. [3].
Figure 4: Reconfigurable Wheel Prototype constructed at MIT in 2008
Figure 5: Potential implementation of reconfigurable wheels on a MER-type Mars Rover with automated terrain sensing and estimation and wheel control algorithms. Credit: Animation by Benjamin Schweighart by
JF&A Strategic Visualization with input and original drawings by O. de Weck and B. Baker (MIT).
8
Figure 6: Project Management Plan for reconfigurable wheel SURP project
References
[1] N. Steber and B. Baker, “Reconfigurable Wheels for Planetary Surface Rovers.” 16.622 Final Report, Department of Aeronautics and Astronautics, Massachusetts Institute of Technology, 2008.
[2] A. Siddiqi, O.L. de Weck, and K. Iagnemma, “Reconfigurability in Planetary Surface Vehicles: Modelling Approaches and Test Study.” Journal of the British Interplanetary Society (JBIS), Vol. 59, pp. 450-460, 2006
[3] J. Y. Wong, Theory of Ground Vehicles. 3rd ed. John Wiley & Sons, 2001
[4] J. D. Terry and M. A. Minor, “Traction Estimation and Control for Mobile Robots Using the Wheel Slip Velocity.” Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, September 2008.
[5] K. Iagnemma, S. Kang, H. Shibly and S. Dubowsky, “Online Terrain Parameter Estimation for Wheeled Mobile Robots with Application to Planetary Rovers.” IEEE Transactions on Robotics, Vol. 20 pp. 921-927, 2004
9
20. SURP Budget SheetCategory Dollars
DIRECT COST
1. Salaries— (Itemize) Only “itemize” the person names or job classifications and the number of hours for each. Show one total $ salary figure for labor. Itemize names and hours (or FTE) here
$
2. Labor Fringe — Employee Benefits $
3. Cat A Labor— (Itemize) Only “itemize” the person names or job classifications and the number of hours for each. Show one total $ figure for labor. Itemize names & hours here
$
4. Procurements–PO (Equipment, Materials and Supplies) (Itemize) Itemize here
$
5. Procurement–RSA (or PS) for University Subcontract(s) (Important! See notes #1 and #2 below)Itemize and indicate whether the subcontract will be a RSA or PS type.
$ 75,000
6. Procurements– PS (Itemize) Itemize other (non-university) subcontracts
$
7. Services— (Itemize) Include all in-house services at JPL Itemize here
$
8. Domestic Travel— Itemize where and why $
9. Other—(Itemize) (Chargebacks, etc.) $
10. Total Direct Costs (total of dollars 1 through 8) $
ALLOCATED DIRECT COSTS (ADC)11. Total Allocated Direct Costs (ADC)
ADC rates apply to SURP proposals, but not MPS. See your section administrator for help applying the current ADC rates for the various categories of direct costs above.
$
12. TOTAL BUDGET REQUEST (See Note #3 below.)Sum of Item #9 and #10
$ 100,000
Note #1: You must attach a budget breakdown from each university partner. There is no page limit and the format is the university’s choice. The budget breakdown should be adequate for reviewers to understand labor, procurements, subcontracts, services, travel, and university overhead.Note #2: Use a “RSA” type of subcontract to send funds to your university partner, except for the following circumstances. If your proposal involves hardware or software deliveries or if government furnished property will be sent to the university, then a RSA subcontract will not be allowed. Under these circumstances, use a “PS” type of subcontract. The ADC rates for these two types of subcontracts are significantly different and it is important to make the distinction in your planning stages.Note #3: Consider using the new institutional online Price Estimate Generator (PEG) for your budget estimation. Type “PEG” in your browser and follow instructions for requesting access.
10
21. Budget Details for University Partner(s)(Replace this page with your collaborator’s budget detail. There is no page limit and the format may be of