STUDY OF PATTERN CORRELATION BETWEEN TIME LAPSE SEISMIC DATA AND SATURATION CHANGES A REPORT SUBMITTED TO THE DEPARTMENT OF ENERGY RESOURCES ENGINEERING OF STANFORD UNIVERSITY IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF SCIENCE By Darkhan Kuralkhanov June 2010
Transcript
STUDY OF PATTERN CORRELATION BETWEEN TIME LAPSE SEISMIC DATA AND SATURATION
CHANGES
A REPORT SUBMITTED TO THE DEPARTMENT OF ENERGY RESOURCES ENGINEERING
OF STANFORD UNIVERSITY
IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF SCIENCE
By Darkhan Kuralkhanov
June 2010
iii
I certify that I have read this report and that in my opinion it is fully adequate, in scope and in quality, as partial fulfillment of the degree of Master of Science in Petroleum Engineering.
__________________________________
Prof. Tapan Mukerji (Principal Advisor)
v
Abstract
Time-lapse seismic data has found its applicability in calibrating geological models,
history matching, determining well locations and optimizing production. Time-lapse
seismic data is used as a reservoir-monitoring tool as it can provide information on fluid
dynamics in the reservoir, which is based on the relation between variations of seismic
attributes and changes in formation pressure and fluid saturation. In his study Wu (2003)
established a correlation between saturation changes and seismic data changes. However
his methodology was applied for simple assumptions such as only two wells were
operating and one time interval was investigated. The understanding of the correlation
could be improved by testing the methodology under different conditions.
In this work we addressed those issues. Particularly we investigated the impact of
different template sizes on the correlation. After finding the best template we used it to
study how the correlation changes under the different fluid flow conditions. Moreover we
investigated how the correlation evolves over time for two, four and ten years time
interval.
The study showed that the template size should be approximately equal to the Fresnel
zone to get maximum correlation. The pattern correlation is always higher than the point-
to-point correlation. The pattern correlation shows high results (0.7) in the beginning of
the production but declines with time. If more than one injectors is used the correlation
worsens. The correlation has the same value for two and four years interval.
The effect of pressure on the correlation between saturation change and seismic data
change has not been studied here. However the pressure change also has some effect on
seismic data, thus would be interesting to incorporate the pressure model in the future
studies.
vi
vii
Acknowledgments
First of all I would like to express my gratitude to my Advisor, Tapan Mukerji for his
support and guidance during my studies at Stanford University. In moments when
everything was halted his advice always helped me to find the way out and move on. I
wish him to continue making valuable contributions to the science with help of brilliant
students.
I took a lot of classes from Energy Resources Engineering (ERE) Department at Stanford
University. They comprised the core of my research work and the basis for my future
endeavors. I want to thank the ERE Faculty for the excellent teaching.
I would like to thank my friends: Larisa, Archana, Hai and Maytham with whom we had
great time exploring Bay Area. Small Kazakh Community of Stanford University made
my path enjoyable as well in face of Zhanibek, Zhanara, Ernar, Aigerim, Karlygash, and
Daulet.
My family is always in my heart. I would like to say thanks to my parents, Kadylbek and
Zhemis for many things in my life. Dinara, Rakhat and Nurali are always in my thoughts.
These two years would have been impossible without generous contribution from
Stanford Center for Reservoir Forecasting (SCRF). Thus, I would like to thank all the
affiliates for being interested in the research we conduct. Finally SCRF members, it was
great hearing your talks every week. My knowledge was broadened during those talks.
Thank you for being part of my learning process and life.
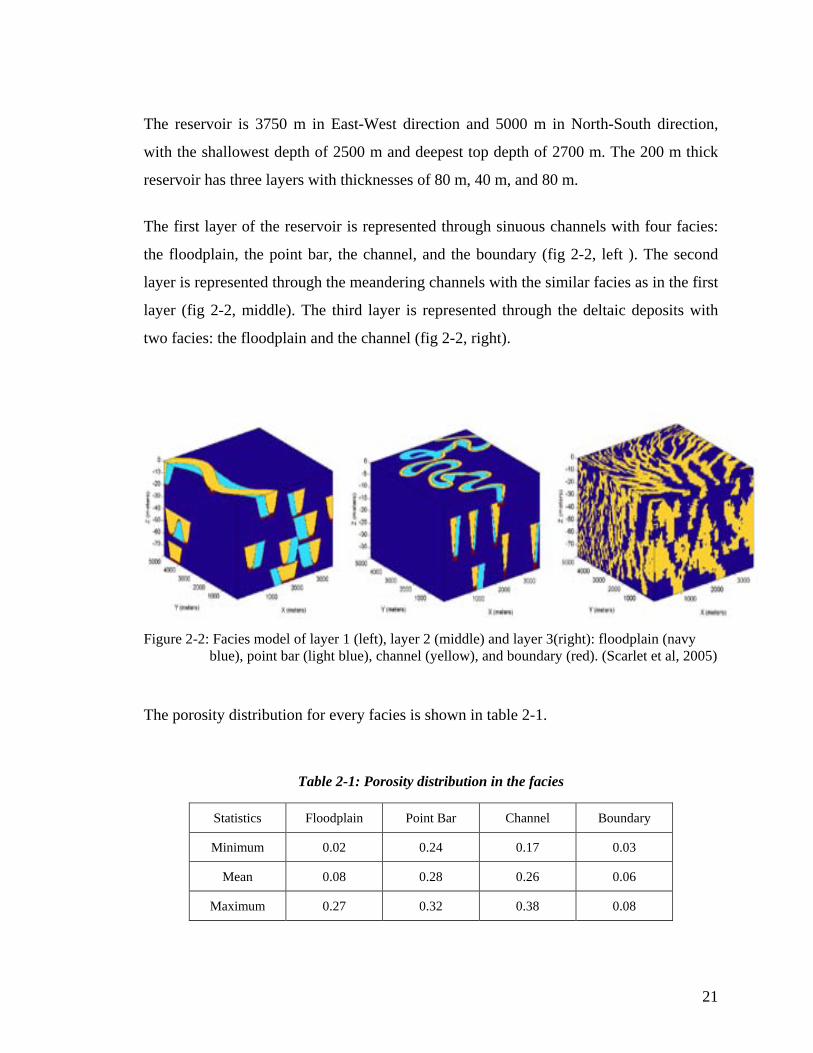
In the equations above, seis(i,j,k,t) and swat(i,j,k,t) represent the seismic amplitude and
water saturation at grid (i,j,k) and time t.
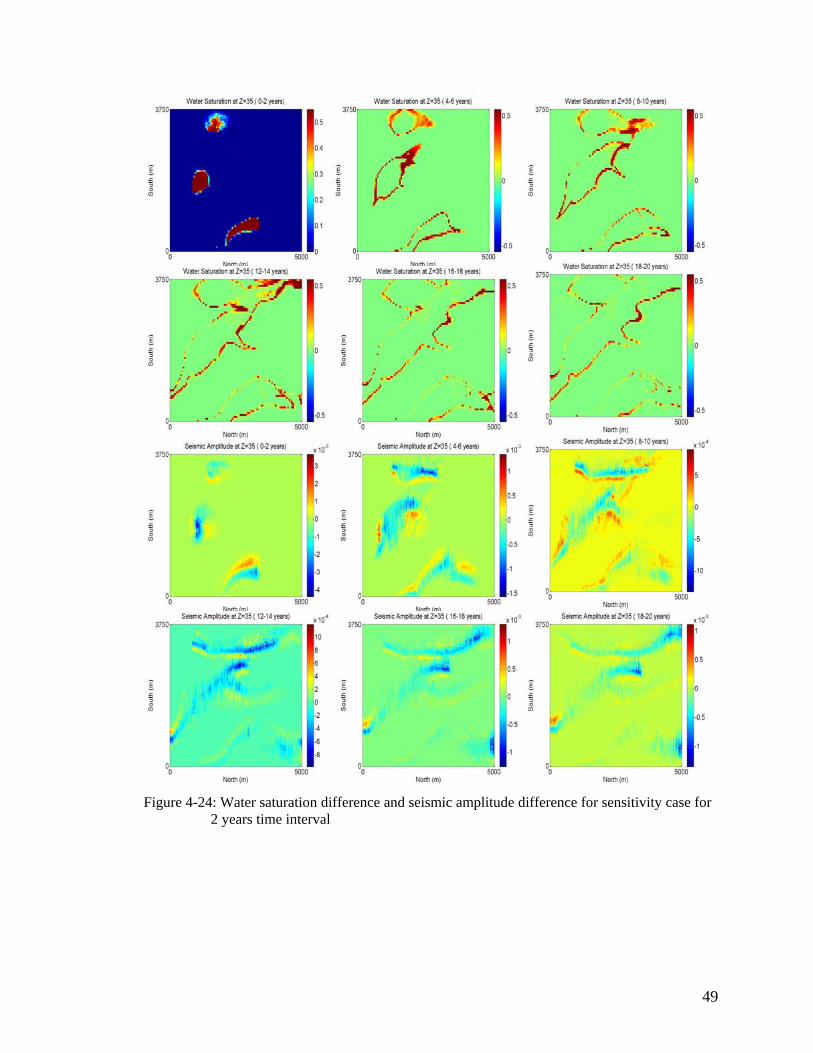
The water saturation change and seismic amplitude change for the base case is shown in
figure 4-1 through 4-3 and for the sensitivity case in figure 4-4 through 4-6. I chose to
show layers 35 in all the plots, because the most of the water went into this layer, thus its
representative of saturation change.
The water saturation change over two years time interval and seismic amplitude change
over the same time interval for layer 35 is shown in figure 4-1. It is apparent that the
water saturation change curve is thinner for 2 years comparing to 4 years, which is
thinner comparing to 10 years as time increases. It happened because the water injection
volume did not change, but the area increased resulting in the thin curve on the boundary
of the water front.
The same concept was observed for the sensitivity case.
46
Figure 4-21: Water saturation difference and seismic amplitude difference base case for 2 years
time interval
47
Figure 4-22: Water saturation difference and seismic amplitude difference base case for 4 years
time interval
48
Figure 4-23: Water saturation difference and seismic amplitude difference for base case for 10
years time interval
49
Figure 4-24: Water saturation difference and seismic amplitude difference for sensitivity case for
2 years time interval
50
Figure 4-25: Water saturation difference and seismic amplitude difference for sensitivity case
with 4 years time interval
51
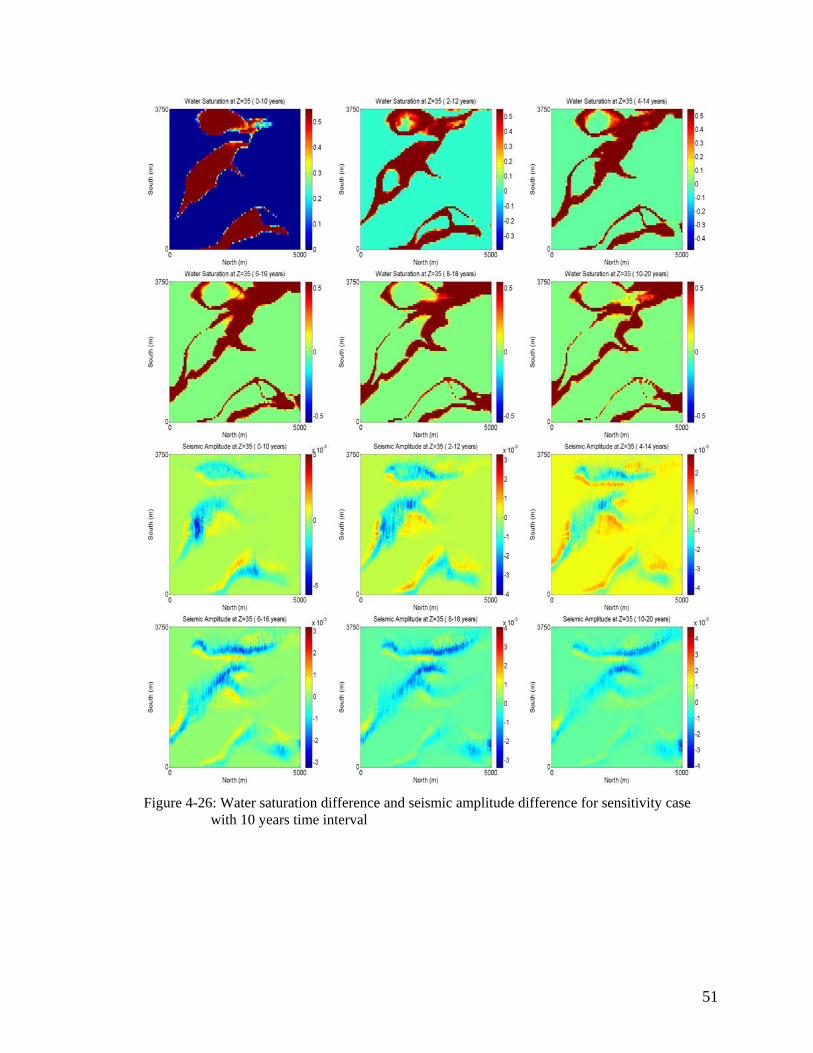
Figure 4-26: Water saturation difference and seismic amplitude difference for sensitivity case
with 10 years time interval
52
4.2. Impact of the Template Window Size on the Correlation
The correlation between the saturation change and seismic amplitude change depends on
the template size, which were studied in this section. The methodology is described
below.
First I evaluated the point-to-point correlation for the base and sensitivity cases for 0-2
years time interval. The correlation was 0.05 and 0.1 for the base and sensitivity case
respectively. The reason for such a poor correlation could be the different support level
between two data sets.
The next step was to consider patterns, which were created by using a 3D template (fig 4-
7). The template size varied in horizontal direction from 3 to 11 grids and in vertical
direction from 1 to 7 grids. The resulting data was used as input parameter into the
principal component analysis (PCA). The PCA is used to reduce the dimensionality and
the first principal components usually are the most representative realizations as they
contain most of the variations. After getting the first and second principal components for
the water saturation change and seismic amplitude change they were standardized. These
data were used to find the correlation.
The results are shown in table 4-1 and 4-2. According to the results horizontal increase of
the template size slightly changes the correlation with increment varying between 0.01
and 0.05. The vertical increase from 1 gird to 3 grids or from 5 grids to 7 girds is not
observed. However when I increased vertical size of the template from 3 to 5 grids, the
correlation increased from 0.05 to 0.71 for the base case and from 0.1 to 0.45 for the
sensitivity case. This template size is approximately equal to Fresnel zone over which we
smoothed out the seismic amplitude. Therefore it is recommended to choose template
size equivalent to Fresnel zone.
53
Table 4-3: Base Case: Correlation between seismic amplitude difference and water saturation difference for 0-2 year time itnerval
Table 4-2: Sensitivity Case: Correlation between seismic amplitude difference and water saturation difference for 0-2 year time itnerval
54
Figure 4-27: a) Horizontal template, b) 3D template for seismic data, c) 3D template for water saturation (Source: Wu, 2003).
55
4.3. Correlation Evolution over Time
The template size of 7x7 was used for this study. The figures illustrate layer 35 as in the previous section.
4.3.1. Base Case
According to the figure 4-8 the correlation coefficient between the second PC of the
seismic data change and the first PC of the water saturation change gives the highest
value of 0.75 for time interval 0-2 and has a declining trend further until it reaches 10-12
time interval, after which it goes up. Whereas the first PC of water saturation change and
the first PC of seismic amplitude change performs slightly better than point-to-point
correlation over the entire 20 years.
Figure 4-9 shows the original water saturation difference and seismic amplitude
difference, first and second PC of water saturation difference and seismic amplitude
difference for time interval 0-2 and 2-4. This when the highest value for the correlation
was obtained. Figure 4-10 shows the same parameters as in figure 4-9, but for time
interval 10-12 and 12-14 years. This is when the worst correlation was obtained.
Figure 4-28: Correlation coefficient for the base case 2 years interval
56
Figure 4-29: Original, first and second PC of saturation change and seismic data change for the base case for time interval 0-2 and 2-4 years
57
Figure 4-30: Original, first and second PC of saturation change and seismic data change for the
base case for time interval 10-12 and 12-14 years
58
The correlations for the 4 years time interval has the same trend as for 2 years time
difference.
Actually the results repeated findings of Wu’s work. He got the pattern correlation
around 0.7 for time interval 0-2 and 0-4 years.
The apparent reason for the correlation coefficient to decline could be observed in figure
4-9 and 4-10. In figure 4-9 the water saturation change is given as a bulk of water at the
injector location, thus we have seismic amplitude at the same place. In figure 4-10 the
water saturation change is given as a thin curve at the front of the moving water. That
thin curve covers a big area resulting in the spread of the seismic amplitude over that big
area and smoothed by Fresnel zone. It is obvious that in this case the correlation would
be low.
Figure 4-31: Correlation coefficient for the base case 4 years interval
59
Figure 4-32: Original, first and second PC of saturation change and seismic data change for the
base case for time interval 0-4 and 2-6 years
60
Figure 4-33: Original, first and second PC of saturation change and seismic data change for the
base case for time interval 8-12 and 12-16 years
61
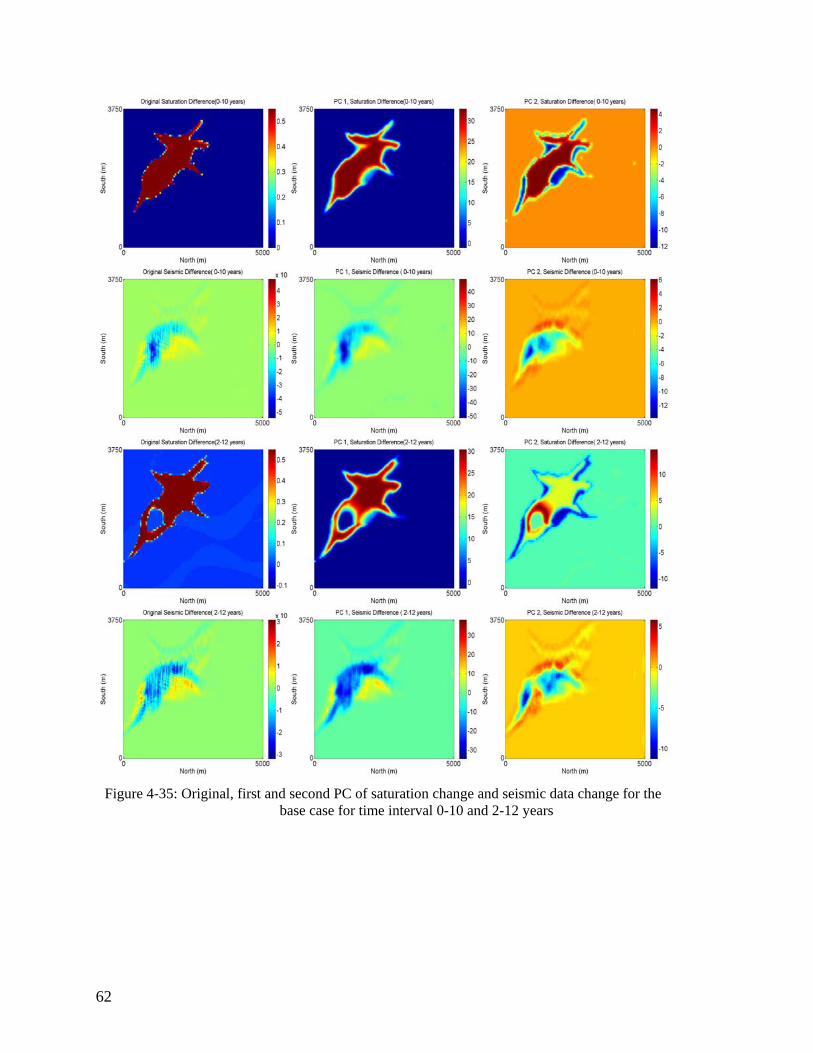
Correlation for 10 years worsened from 0.75 to 0.65, but still follows the same trend as
for 2 and 4 years time interval.
Figure 4-34: Correlation coefficient for the base case 10 years interval
62
Figure 4-35: Original, first and second PC of saturation change and seismic data change for the
base case for time interval 0-10 and 2-12 years
63
Figure 4-36: Original, first and second PC of saturation change and seismic data change for the
base case for time interval 6-16 and 10-20 years
64
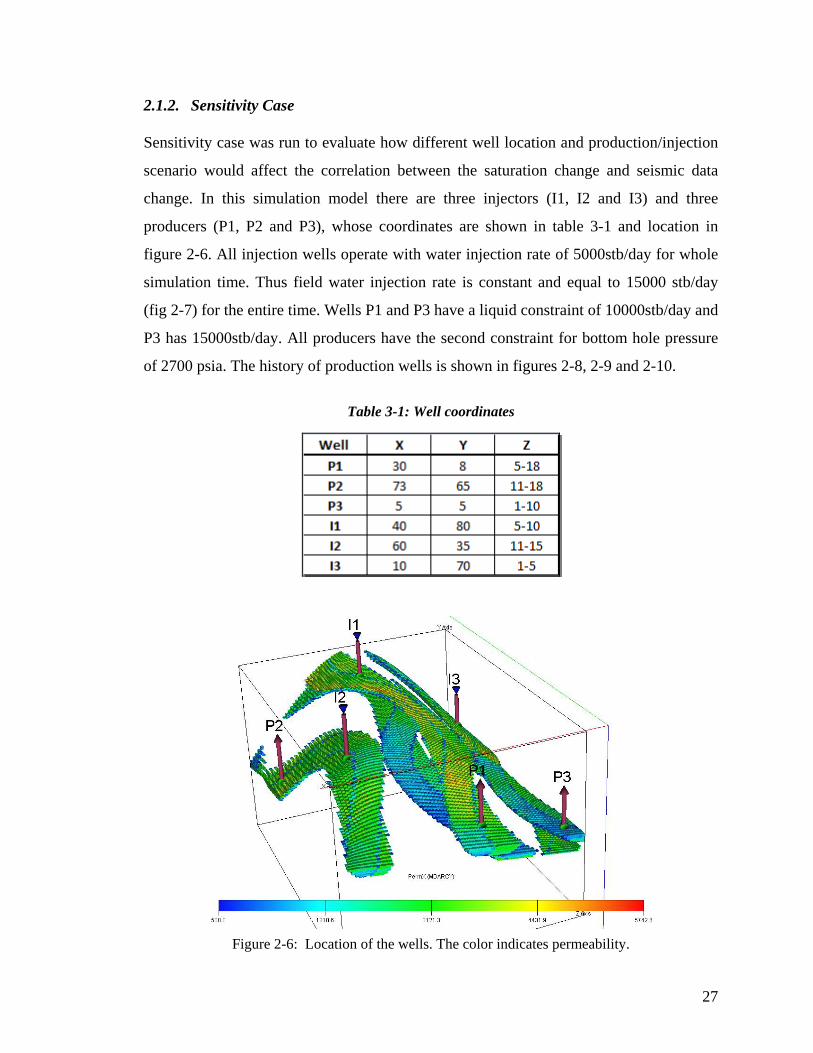
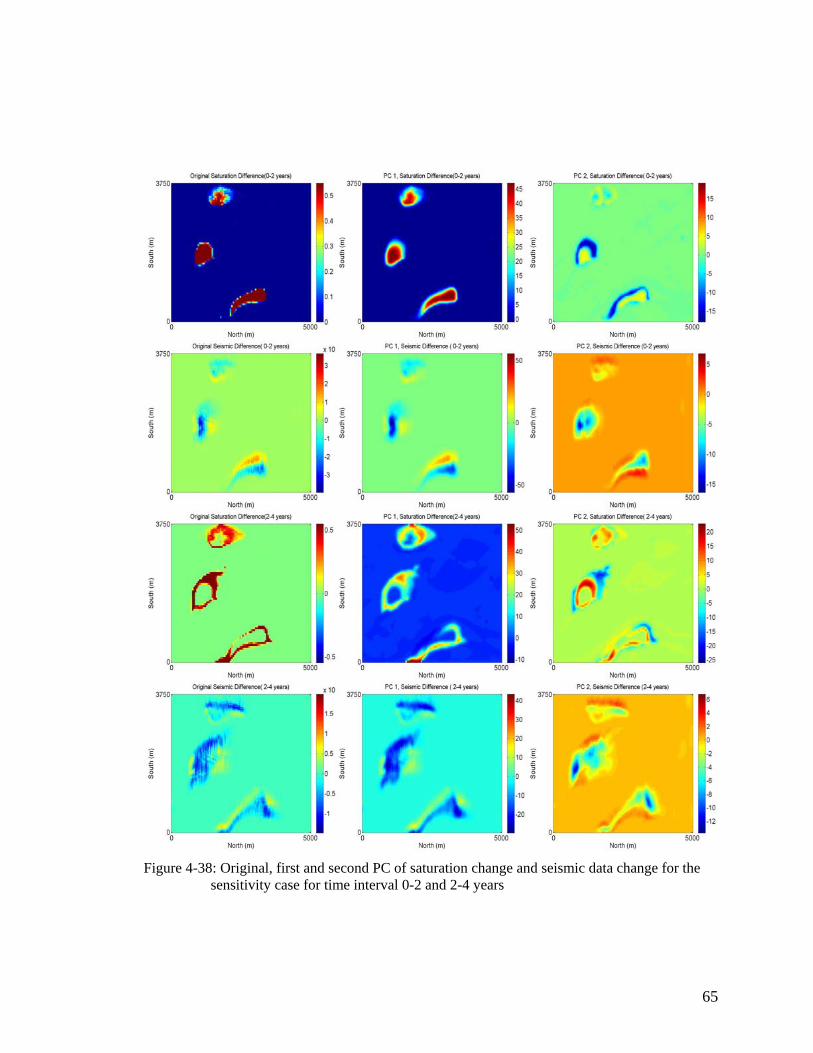
4.1.2. Sensitivity Case
In this case we had three wells injecting water at different location, but with the same
water injection rate. The correlation coefficient worsened form 0.75 to 0.47. This is
happened probably because there were many spots of water saturation change instead of
one. However the same trend is preserved as for the base case.
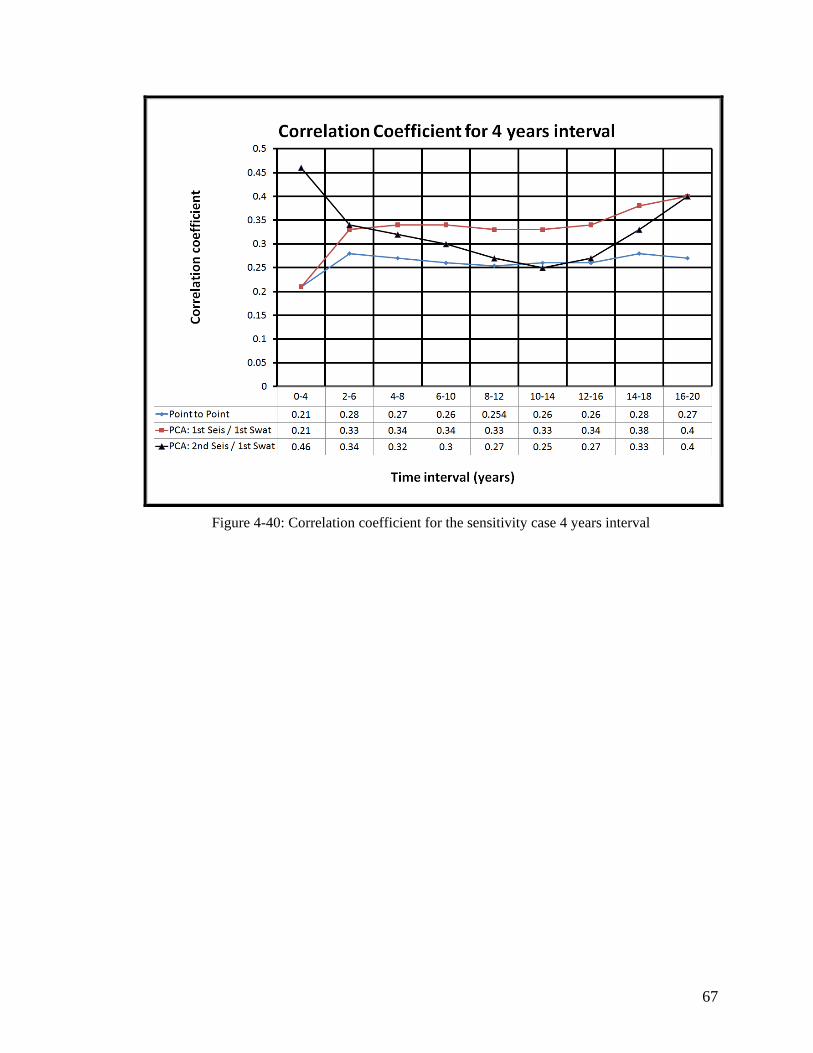
Also, it is noticeable that the second PC of the seismic data change can work only first 4
years, after that the first PC of the seismic data change shows better correlation.
We observe the same trend for 2, 4 and 10 years.
Figure 4-37 : Correlation coefficient for the sensitivity case 2 years interval
65
Figure 4-38: Original, first and second PC of saturation change and seismic data change for the
sensitivity case for time interval 0-2 and 2-4 years
66
Figure 4-39: Original, first and second PC of saturation change and seismic data change for the
sensitivity case for time interval 10-12 and 12-14 years
67
Figure 4-40: Correlation coefficient for the sensitivity case 4 years interval
68
Figure 4-41: Original, first and second PC of saturation change and seismic data change for the
sensitivity case for time interval 0-4 and 2-6 years
69
Figure 4-42: Original, first and second PC of saturation change and seismic data change for the
sensitivity case for time interval 8:12 and 12-16 years
70
Figure 4-43: Correlation coefficient for the sensitivity case 10 years interval
71
Figure 4-44: Original, first and second PC of saturation change and seismic data change for the
sensitivity case for time interval 0-10 and 2-12 years
72
Figure 4-45: Original, first and second PC of saturation change and seismic data change for the
sensitivity case for time interval 6-16 and 10-20 years
73
Chapter 5
5. Conclusions and Future Work
5.1. Summary and Conclusions
There was a research work performed to establish the pattern correlation between a
saturation change and seismic data change. According to the results of that study there
was a good pattern correlation (around 0.7) comparing to the poor point-to-point
correlation (around 0.3) between the saturation change and seismic data change. The
reason for this was a different support level between the seismic data and saturation data.
That work was performed for one injector and one producer operating under the constant
conditions in the second layer of Stanford V reservoir model for two years.
We conducted the further study of the pattern correlation. Particularly we studied what
kind of impact a different template size, well location and production/injection scenario
would have on the correlation. Also the correlation evolution was observed for 20 years
of production/injection period for time intervals of 2, 4 and 10 years. To conduct the
studies mentioned above the first layer of Stanford VI reservoir model was used, which
was more complex than Stanford V.
The data preparation part of the workflow included several procedures such as the fluid
flow simulation to obtain the saturation at different times and the forward seismic
simulation to obtain the time-lapse seismic data. There were two flow simulation
scenarios run: base case with two wells and sensitivity case with six wells. After the data
set was ready the seismic difference and saturation difference cubes were generated for 2,
4 and 10 years time intervals. Further we used the template (moving window) to generate
several realizations of the data set. These realizations were input for the principal
component analysis, which provided the principal components. The first and second
principal components accounted for the most variations in the data set. This modified
74
data set was used to evaluate the correlation between the saturation change and seismic
data change.
The study of the template size affect on the correlation showed that the increase of the
template size in the horizontal direction improves the correlation slightly, but the increase
in the vertical direction has a significant impact. In our case for example the increment of
the correlation varied between 0.01 and 0.05 when the template size was increased
horizontally. The increment of the correlation jumped from 0.4 to 0.6 when in vertical
direction the grid numbers increased from 3 to 5. But should be mentioned that there
were no effect when the grid size increased from 1 to 5 and from 5 to 7. I guess this one
is associated with Fresnel zone and filtering we used for the seismic data. So the best
would be to have the template size that accounts for the Fresnel zone.
The evolution of the correlation over the time showed two behaviors. First that the
correlation for the first principal component of seismic cube and the first component of
the saturation is better than the point-to-point correlation, but not much. Second is that
the correlation between the second principal component of the seismic amplitude
difference cube and the first component of the water saturation difference cube has a
good correlation coefficient of about 0.76 for the base case and 0.45 for the sensitivity
case for the first time interval of 2 and 4 years. This value is not constant, actually it
declines and reaches point-to-point correlation, after which it goes up. The reason for that
could be that in the beginning the water moves as a bulk of water and it correlates with
the seismic data change. But when for example time interval of 12-14 year is taken, then
the change in water saturation is usually represented by a thin curve on the front of the
water move. Such a small change gives the seismic response that is smoothed out over
the large area, thus reduces the correlation.
The above two studies was carried out for the base case with the one injection well and
one production well. In the sensitivity case three injectors and 3 producers were used.
The correlation was poorer than the base case.
75
5.2. Future Work
In this study I explored the correlation between the water saturation change and seismic
amplitude change under the different conditions. There are still some other methods and
techniques to improve understanding of the correlation between two data type of the data
sets:
• Pressure change also has an impact on the seismic data set, thus on the
correlation. Moreover there is a study that shows that the effect of the pressure
change should not be neglected as it has significant impact (Suman, 2009). Thus it
would be of interest to incorporate the pressure change when constructing the
seismic amplitudes and study how it affects the correlation.
• The synthetic models are very important in testing concepts, but the application of
this method to the real reservoir data set is of main importance. The next step
could be to try this method on a real reservoir data set and see what correlation
could be obtained under the real conditions.
• Kernel Principal Component Analysis has proven to be effective tool in working
with patterns than Principal Component Analysis. Also it is good to detect
curvatures.
77
Nomenclature
amp = Seismic amplitude imp = Seismic impedance ρ = Bulk density ρfl = Fluid density φ = Porosity ρfl1 = Fluid density for fluid 1 ρfl2 = Fluid density for fluid 2 Vp = Compressional velocity Vs = Shear velocity K2 = Bulk modulus for fluid 2 G2 = Shear modulus for fluid 2 Kmin = Bulk modulus of the mineral
Kfl = Bulk modulus of the fluid Kfl1 = Bulk modulus of the fluid 1
Kfl2 = Bulk modulus of the fluid 2
ttop = Two way travel time from the surface to the top of the reservoir ∆t = Two way travel time from the top to the bottom of the grid t = Two way travel time from the surface to the bottom of the grid seis(i,j,k,t) = Seismic amplitude at grid location (i,j,k) at time (t) swat(i,j,k,t) = Water saturation at grid location (i,j,k) at time (t) δseis(i,j,k,t) = Seismic Amplitude difference δswat(i,j,k,t) = Water Saturation difference
78
References
Aziz, K., Durlofsky, L., and Tchelepi, H., 2005, "Notes on Reservoir Simulation", Stanford University, Stanford, CA.
Beucher, H., Fournier, F., Doligez, B., and Rozanski, J., 1999, "Using 3D seismic-
derived information in lithofacies simulations. A case study", Paper SPE 56736, SPE Annual Technical Conference and Exhbition, Houston, TX.
Caers, J., 2005, “Petroleum Geostatistics”, Society of Petroleum Engineers. Castro, S., Caers, J. and Mukerji, T., 2005, “The Stanford VI Reservoir”, Stanford
Center for Reservoir Forecasting, Annual Report. Castro, S., 2007, “A Probabilistic Approach to the Joint Integration of 3D/4D
Seismic, Production Data and Geological Information for Building Reservoir Models”, PhD thesis, Stanford University, Stanford, CA.
Chen, G., Wrobel, Kelly., Tiwari, A., Zhang, J. and Payne, M., 2008, “4D Seismic in
Carbontes: From Rock Physics to Field Examples”, Paper IPTC 12065, International Petroleum Technology Conference, Kuala Lumpur, Malaysia.
Foster, D.G., 2007, “The BP 4-D Story: Experience Over the Last 10 Years and
Current Trends”, International Petroleum Technology Conference, Dubai, U.A.E. Gassmann, F., 1951, Über die Elastizität poroser Medien, Vierteljahrsschrift der
Naturforschenden Gesellschaft in Zürich, 96, 1-23. Goovaerts, P., 1997, “Geostatistics for Natural Resources Evaluation”, Oxford
University Press, New York. Jolliffe, I., 1986, “Principal Component Analysis”, Springer-Verlag, New York. Kelamis, P.G., Uden, R.C. and Dunderdale, I., 1997, “4D Seismic Aspects of
Reservoi Managment”, Paper OTC 8293, Offshore Technology Conference, Houston, TX.
79
Marschall, R. and Sherlock, D., 2002, “Some Aspects of 4-D Seismics for Reservoir
Monitoring”, Paper SPE 75150, SPE Improved Oil Recovery Symposium, Tulsa, OK.
Mukerji, T., Jorstad, A., Avseth, P., Mavko, G. and Granli, J., 2001, “Mapping
Lithofacies and Pore-Fluid Probabilities in a North Sea reservoir: Seismic Inversion and Statistical Rock Physics”, Geophysics 66(4), 988-1001.
Mukerji, T., Mavko, G., Mujicat, D. and Lucet, N., 1995, “Scale-Dependent Seismic
Velocity in Heterogeneou Media”, Geophysics 60 (4), 1222-1233. Mukerji, T., Mavko, G., and Rio, N., 1997, “Scales of Reservoir Heterogeneities and
Impact of Seismic Resolution of Geostatistical integration”, Mathematical Geology 29, 933-949.
Sheriff, R. and Geldart, L., 1995, “Exploration Seismology”, Second Edition,
Cambridge University Press. Scheeven, J.R. and Payrazyan, K., 1999, “Principal Component Analysis Applied to
3D Seismic Data for Reservoir Property Estimation”, Paper SPE 56734, SPE Annual Technical Confrence and Exhibition, Houston, TX.
Suman A., 2009, "Uncertainties in Rock Pore Compressibility and Effects on Seismic
History Matching", MS Thesis, Stanford University, Stanford, CA. Wu, J., 2007, “4D Seismic and Multiple-Point Pattern Data Integration Using
Geostatistics”, PhD thesis, Stanford University, Stanford, CA.