Switched Reluctance Motor Switched Reluctance Motor for Electrical Drives for Electrical Drives of Electric Power Plants Equipment Electric Power Plants Equipment Vladimir Vladimir Kuzmichev Kuzmichev MPEI(TU), ORGRES MPEI(TU), ORGRES
Transcript
Switched Reluctance Motor Switched Reluctance Motor for Electrical Drives for Electrical Drives of
Electric Power Plants Equipment Electric Power Plants Equipment
Vladimir Vladimir KuzmichevKuzmichevMPEI(TU), ORGRESMPEI(TU), ORGRES
ContentsContents
� Overview of Switched Reluctance Motors� Electrical Drives Structure of Electric Power
Plants� Development Strategy of RAO “UES Russia” � Main Purposes and Stages of the Project� Some Results of my Work
Moscow Power Engineering Institute (Technical University)General Information
MPEI consists of 7 Technical Institutes• Institute of Electrical Power Engineering and Mechanics• Institute of Heat-Power Engineering and Technical Physics• Institute of Power Engineering Efficiency Problems• Institute of Electrical Engineering• Institute of Electrical Power Engineering• Institute of Automatics and Computer Engineering• Institute of Radio Engineering and Electronics
Moscow Power Engineering Institute (Technical University)General Information
There are• 70 Departments• 550 educational laboratories for students • 100 research laboratories
in MPEI
MPEI is • more than 1500 professors, associated professors and lecturers • 10 000 Russian students• nearly 500 foreign students from 40 countries• 500 Ph.D. students
Joint Stock Company "Firm ORGRES for adjustment, improvement of
technology and operation of power plants and networks"
Now ORGRES is a part of Russia Joint Stock Company Unified Energy System of Russia. Staff of the firm consists of 570 persons. Most of them are engineers.
Firm ORGRES is accredited by Gosstandart of Russia as directing agency for certification of the domestic and imported equipment,as well as communication facilities intended for use within power industry of the Russian Federation
ServicesORGRES performs all kinds of professional services in the field utilization of new equipment, advanced technologies and improvement of operation of power equipment at stages of designing, construction, putting into operation and operation :
Core activitiesThermal power plants and water-heating boilersHydroelectric power plantsBackbone and distribution electric networksDistrict-heating networks
Joint Stock Company "Firm ORGRES for adjustment, improvement of
technology and operation of power plants and networks"
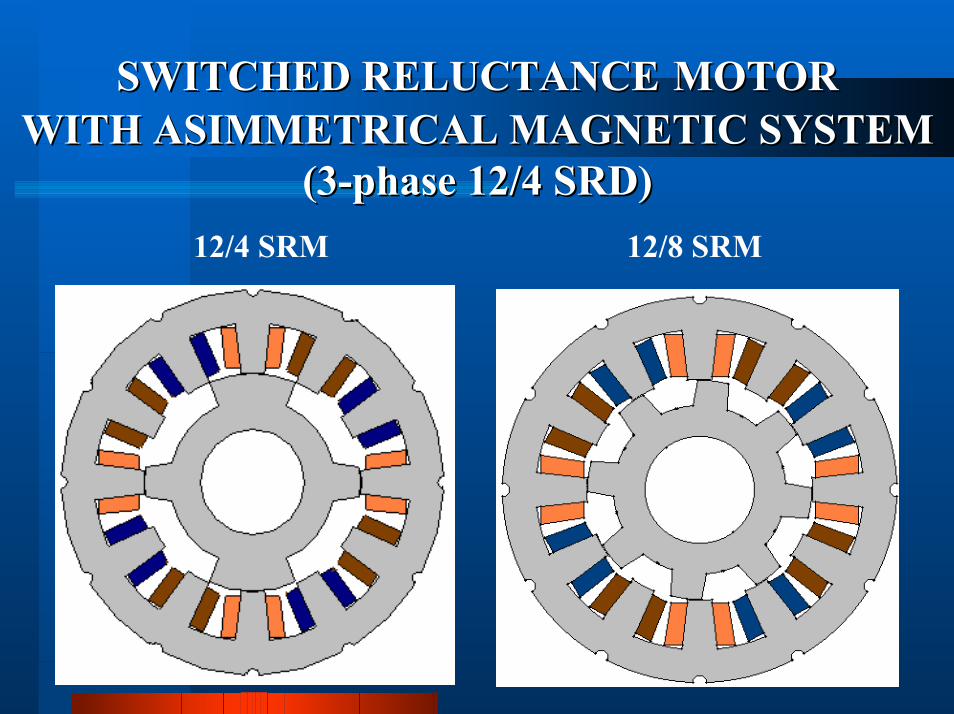
Structure Flowchart of Structure Flowchart of Switched Reluctance MotorSwitched Reluctance Motor
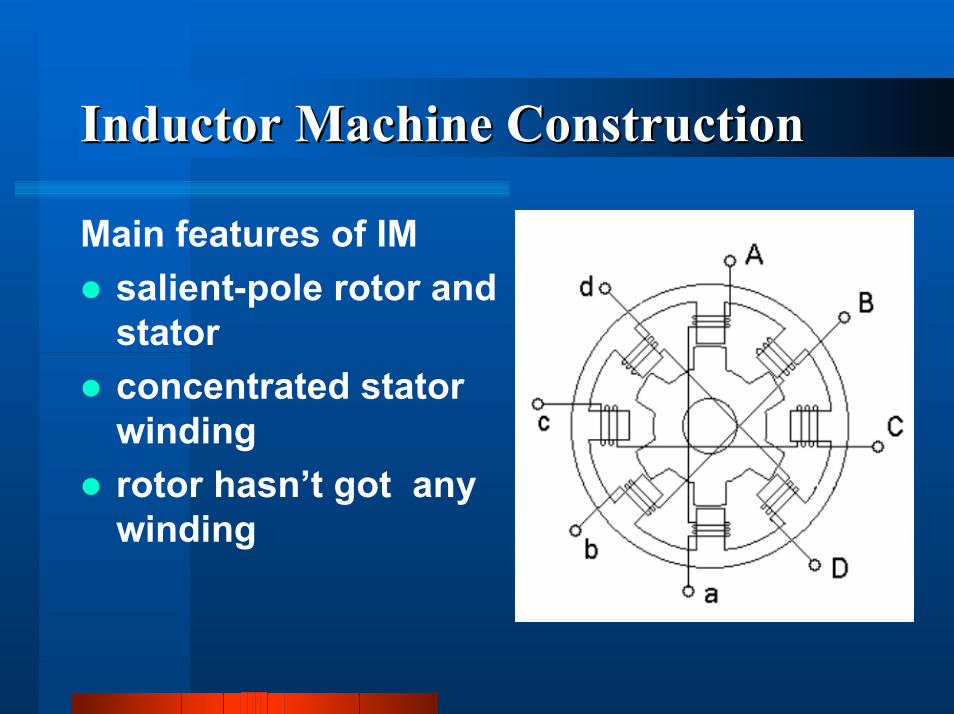
Inductor Machine ConstructionInductor Machine Construction
Main features of IM� salient-pole rotor and
stator� concentrated stator
winding� rotor hasn’t got any
winding
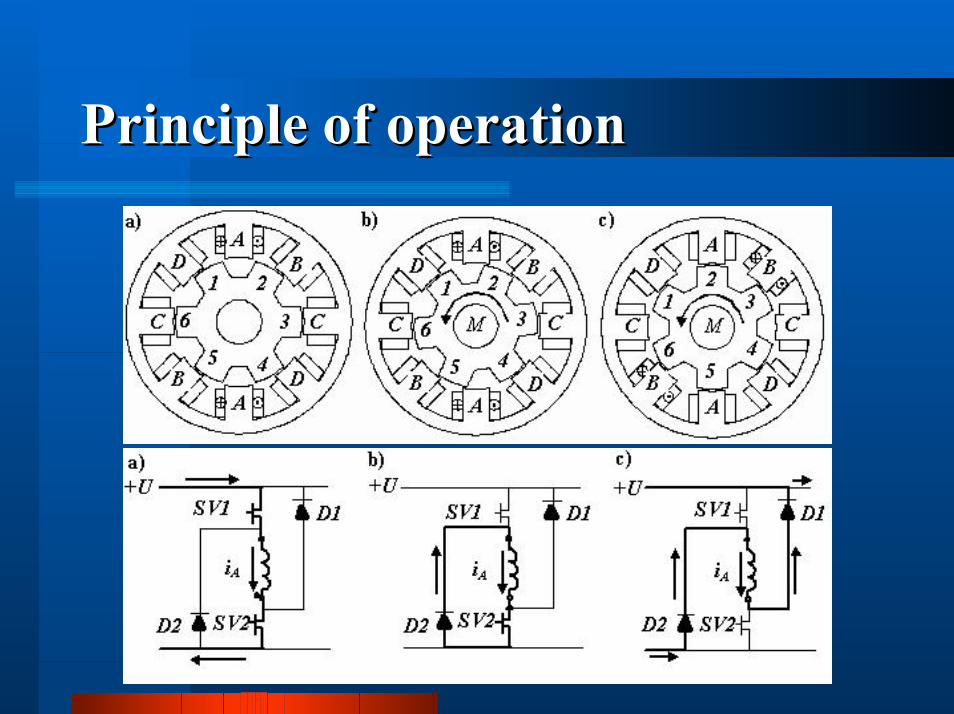
Principle of operationPrinciple of operation
Principle of operationPrinciple of operation
Advantages of Switched Reluctance Advantages of Switched Reluctance MotorMotor
� Simplicity and reducibility of construction� Low manufacturing and operating costs� Fault tolerance� High torque/inertia ratio and efficiency
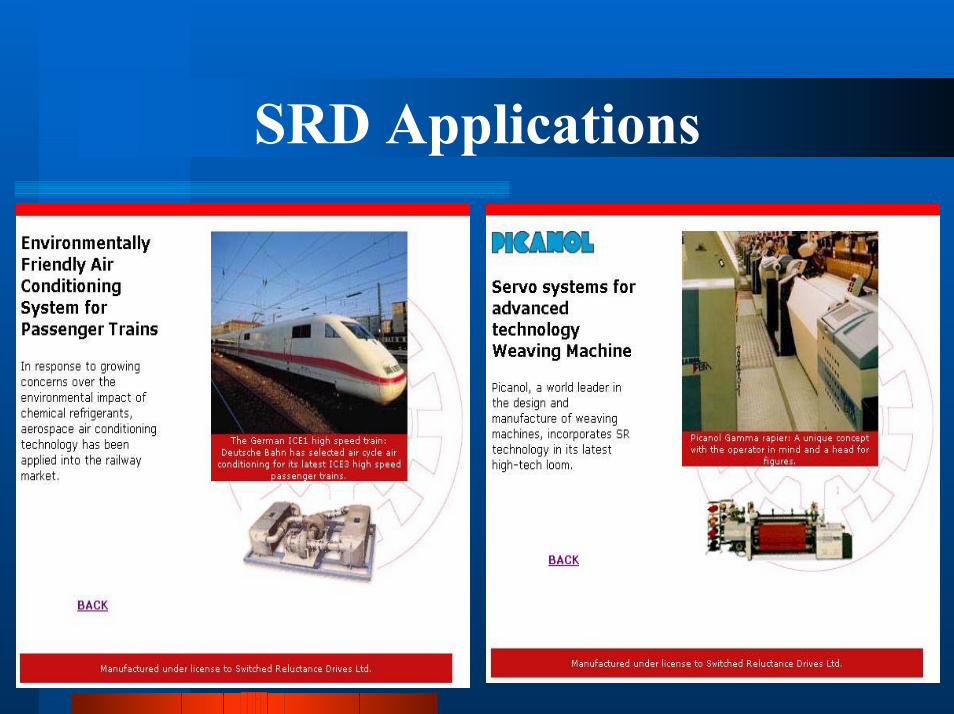
SRD Applications
SRD Applications
SRD Applications
SRD Applications
SRD Applications
Disadvantages of Switched Disadvantages of Switched Reluctance MotorReluctance Motor� High level of torque ripple� High level of acoustical noise
Electrical motors for controlElectrical motors for control--velocity drives (1990)velocity drives (1990)
23 %
10 %
62 %
1 %3 % 1 %
Induction motors Synchronous permanent magnets motorsDirect current motors Brashles motors Switched reluctance motors Other type of motors
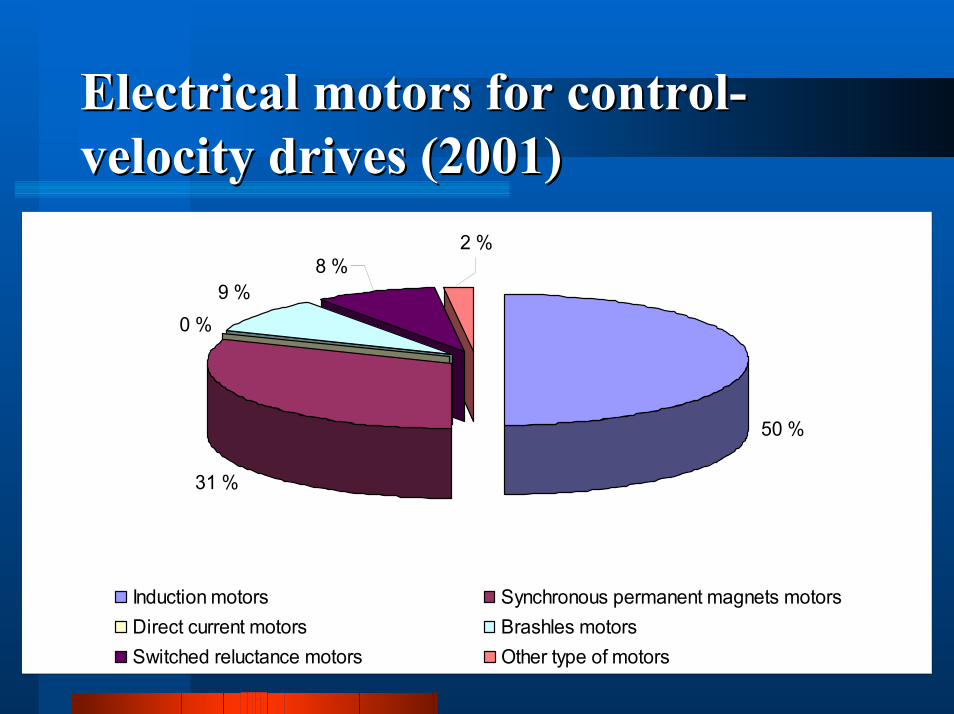
Electrical motors for controlElectrical motors for control--velocity drives (2001)velocity drives (2001)
50 %
31 %
0 %
2 %
9 %8 %
Induction motors Synchronous permanent magnets motorsDirect current motors Brashles motors Switched reluctance motors Other type of motors
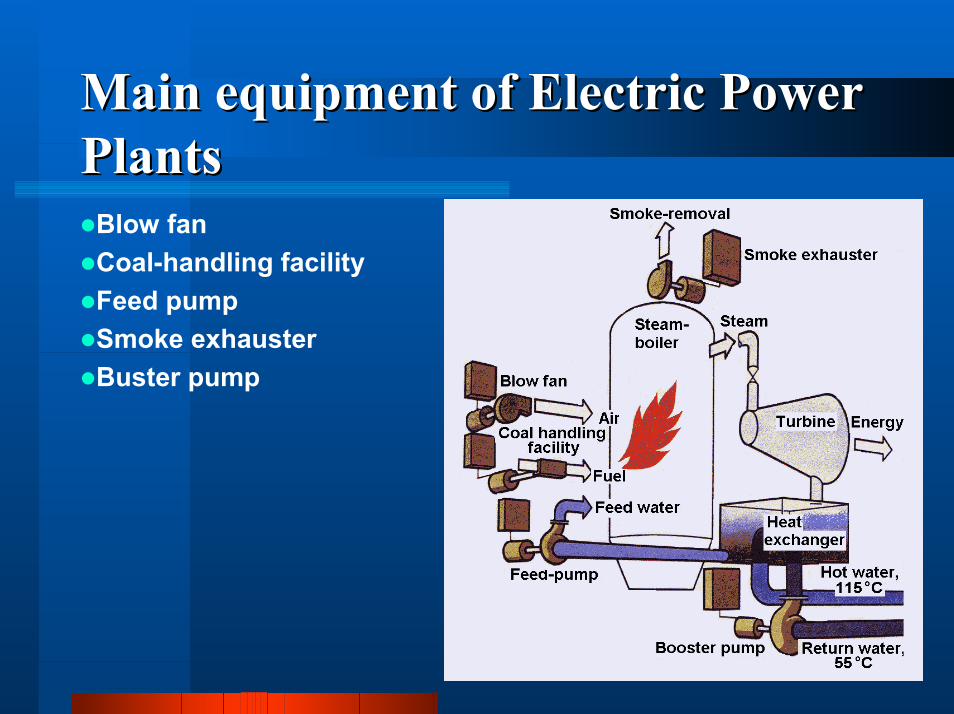
Main equipment of Electric Power Main equipment of Electric Power PlantsPlants�Blow fan�Coal-handling facility�Feed pump�Smoke exhauster�Buster pump
Development Strategy of RAO Development Strategy of RAO “UES Russia”“UES Russia”� Replacement up to 50% of power plants
equipment� Replacement all traditional drives on
variable drives
Purposes of the ProjectPurposes of the Project
� Development accurate and fast mathematical model of SRM
� Development of program for designing and simulation of SRM
� Designing SRMs for electrical power plant equipment
� Characteristics Comparison of induction motor and SRM
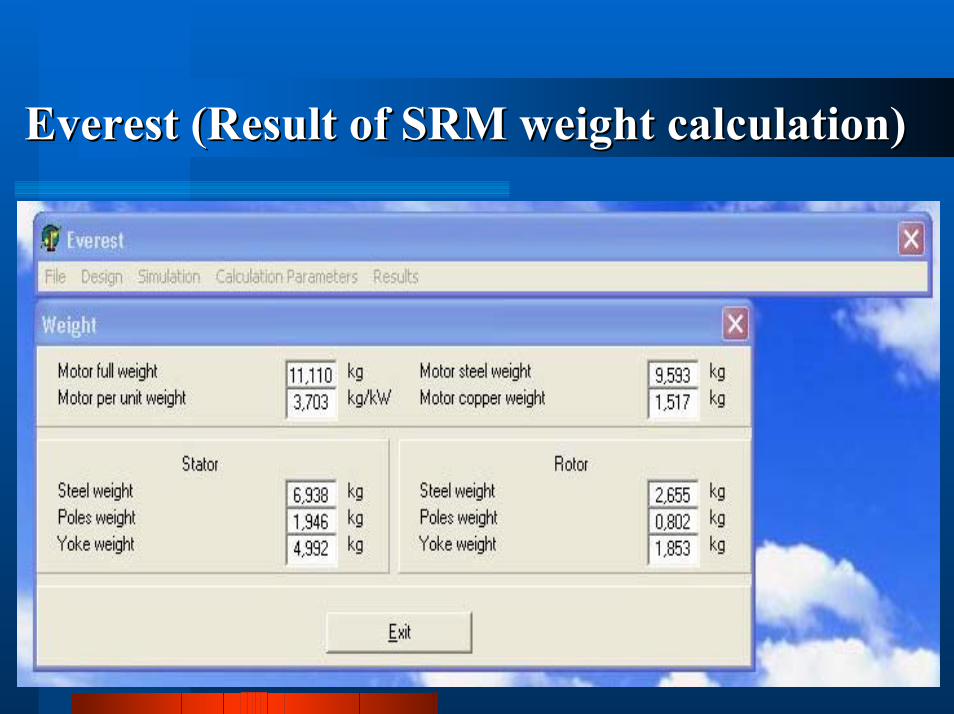
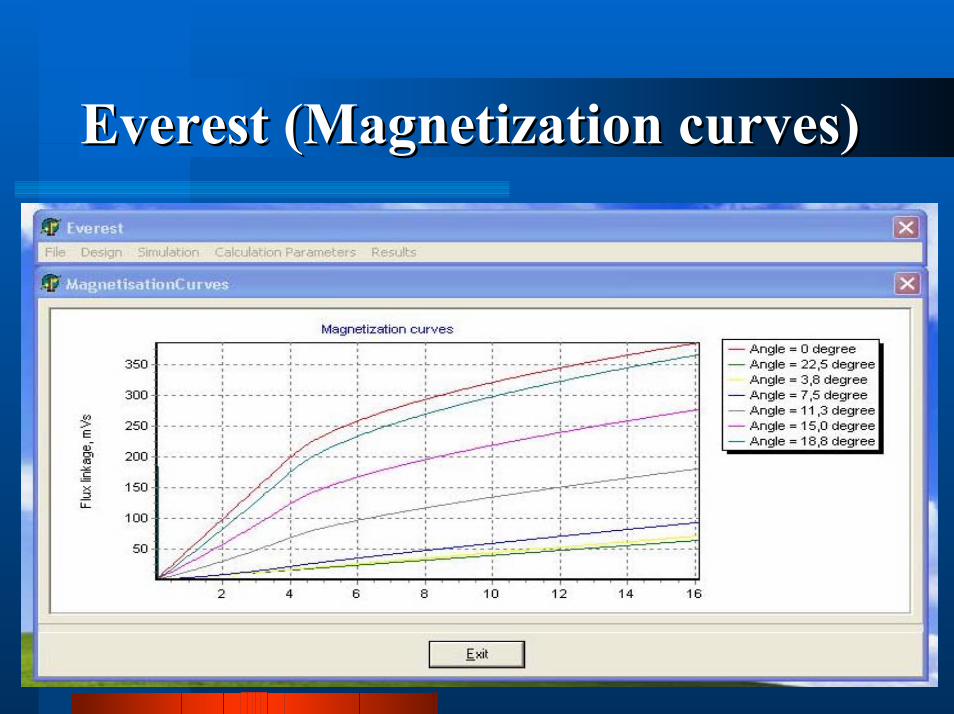
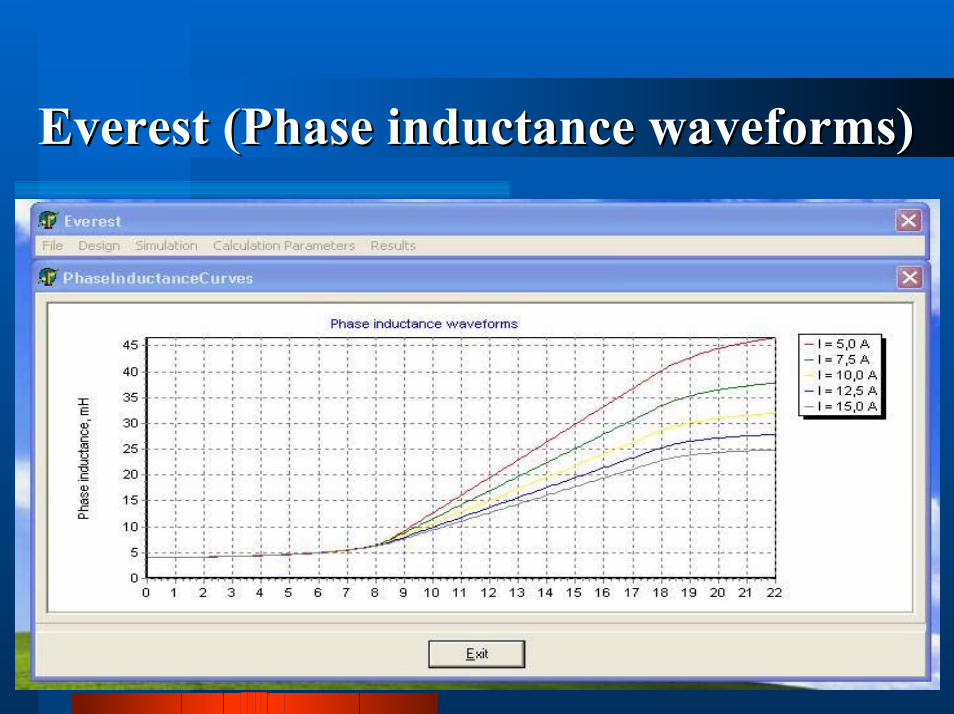
EverestEverest
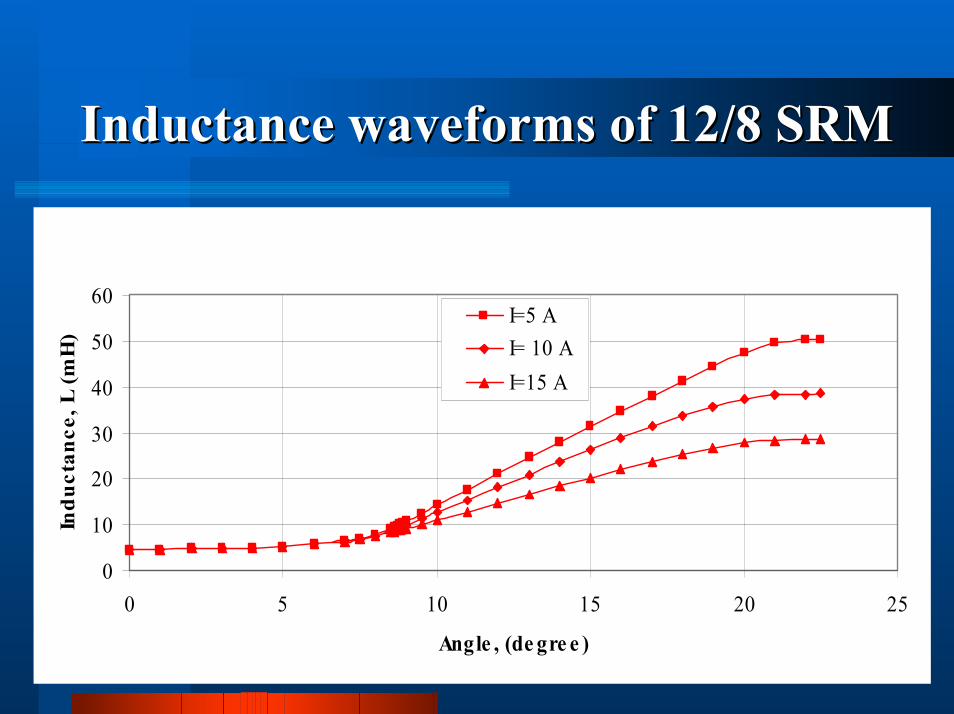
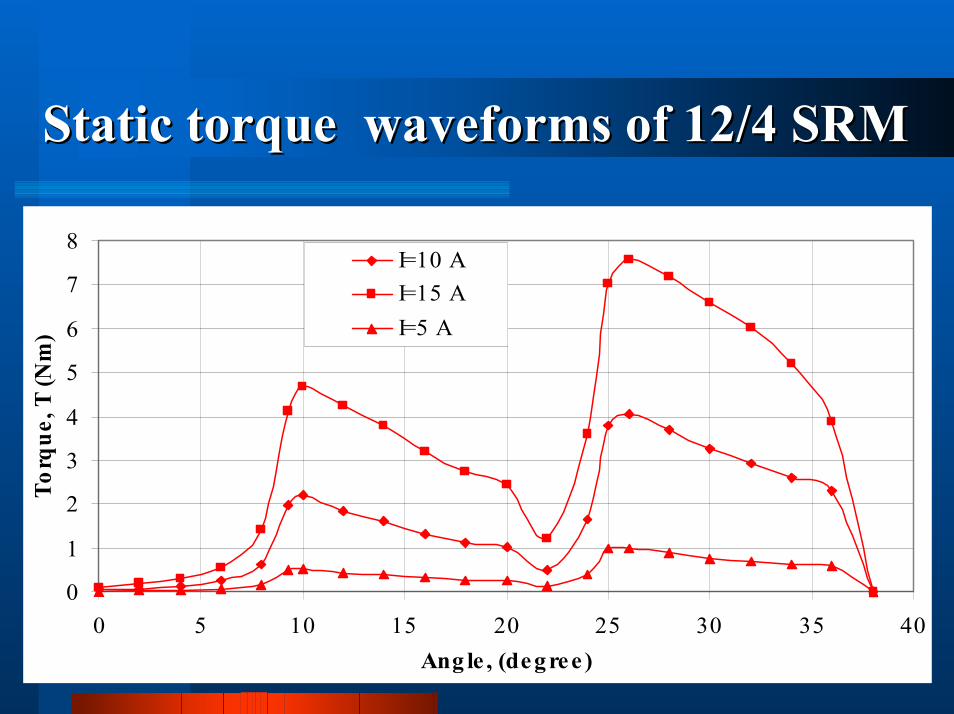
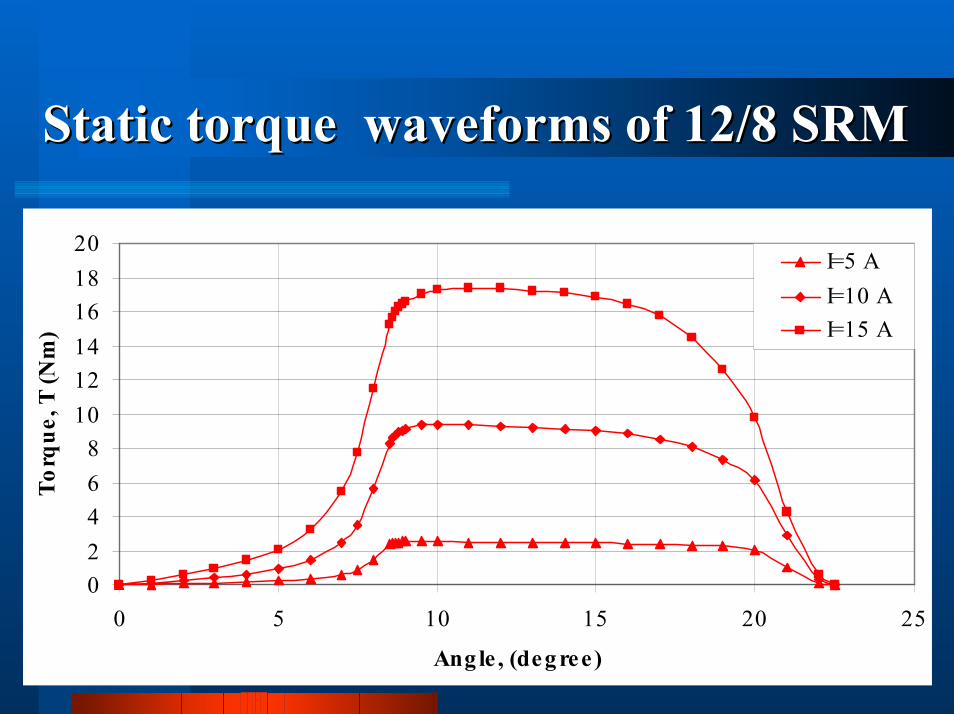
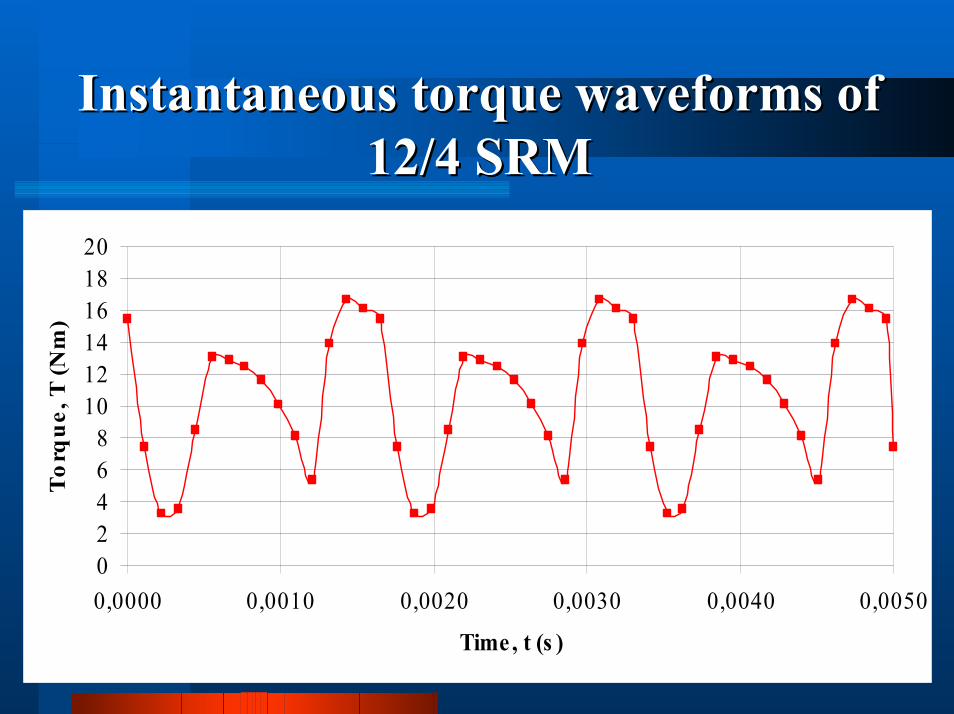
� Designing of SRM� Calculation of magnetization curves� Calculation of inductance waveforms� Calculation of torque waveforms
Everest Everest
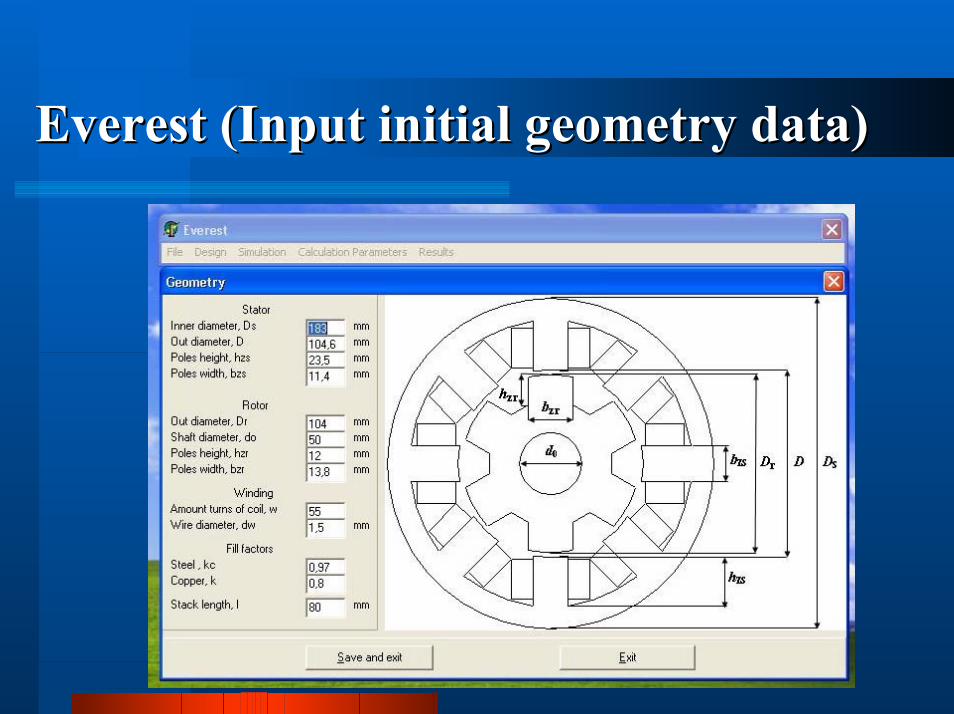
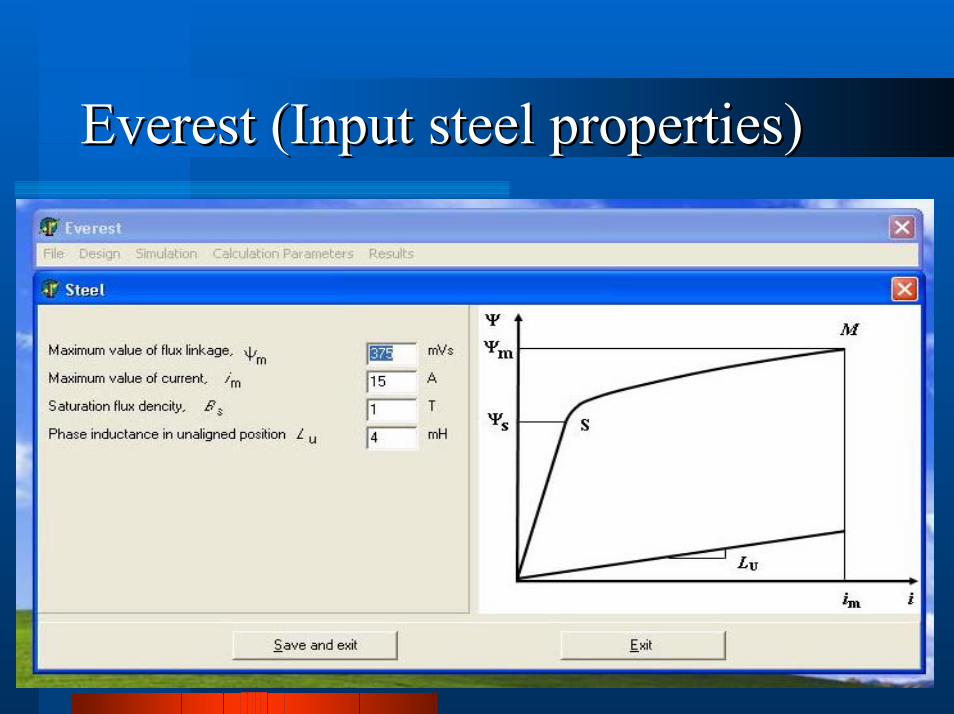
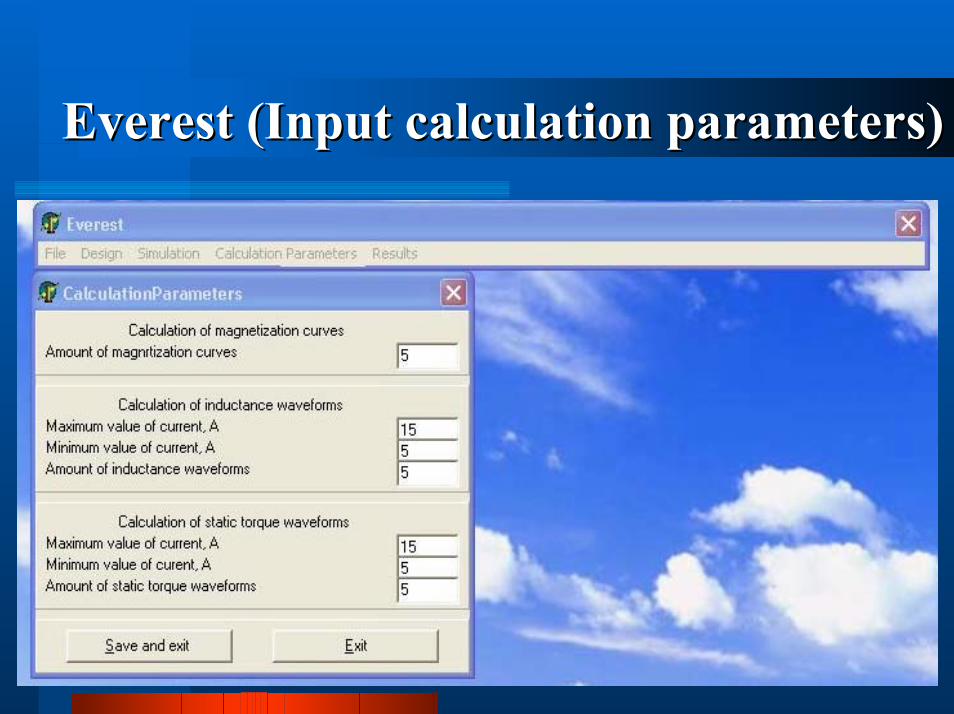
Everest (Input of the initial data)Everest (Input of the initial data)
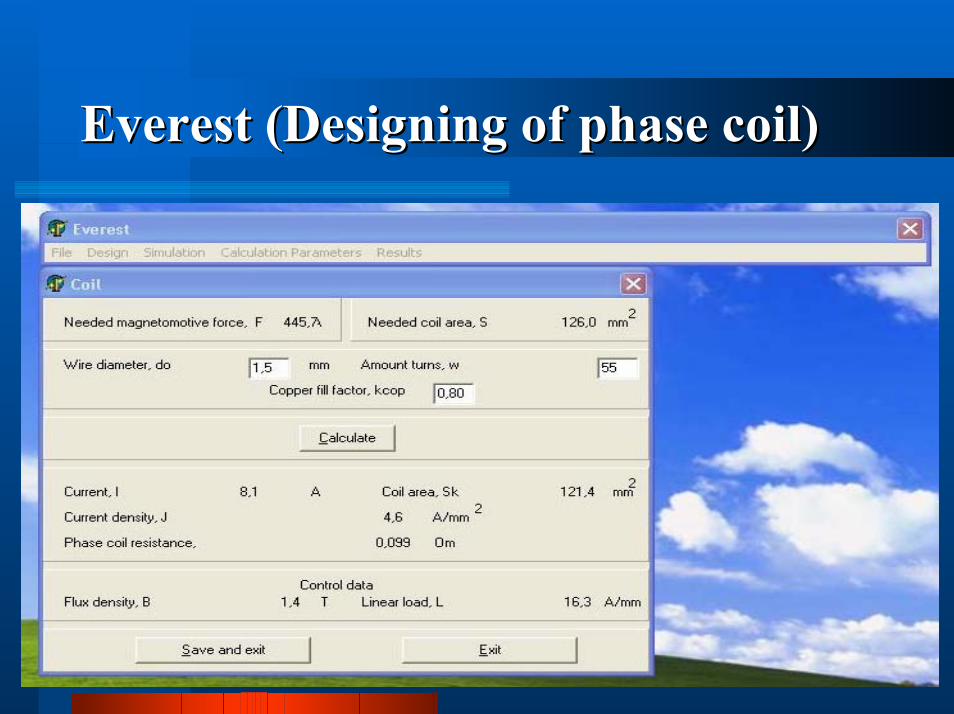
Everest (Designing of phase coil)Everest (Designing of phase coil)
HarmonicHarmonic spectrum of the spectrum of the torque torque waveforms of 12/4 SRMwaveforms of 12/4 SRM
0 5 10 15 20 25
5
10
15
Harmonic number, k
Am
plitu
de o
f the
k-h
arm
onic
, T (N
m)
Kk
k
HarmonicHarmonic spectrum of the spectrum of the torque torque waveforms of 12/8 SRMwaveforms of 12/8 SRM
0 5 10 15 20 25
10
20
30
Harmonic number, k
Am
plitu
de o
f the
k-h
arm
onic
, T (N
m)
30
0
Kk
251 k
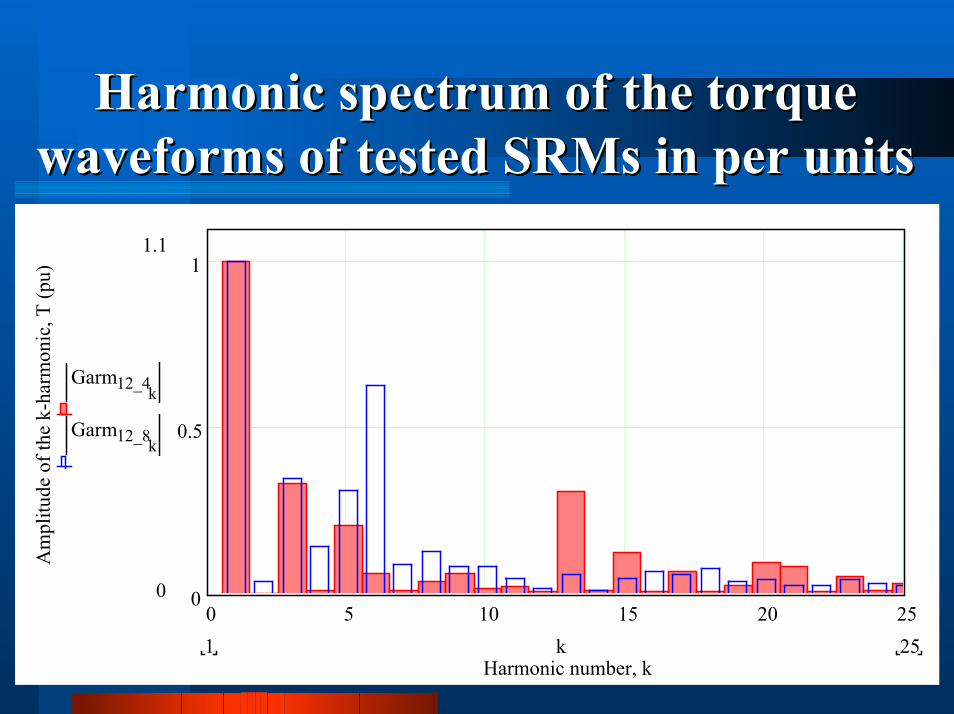
HarmonicHarmonic spectrum of the spectrum of the torque torque waveforms of tested waveforms of tested SRMsSRMs in per unitsin per units
0 5 10 15 20 250
0.5
1
Harmonic number, k
Am
plitu
de o
f the
k-h
arm
onic
, T (p
u)
1.1
0
Garm12_4k
Garm12_8k
251 k
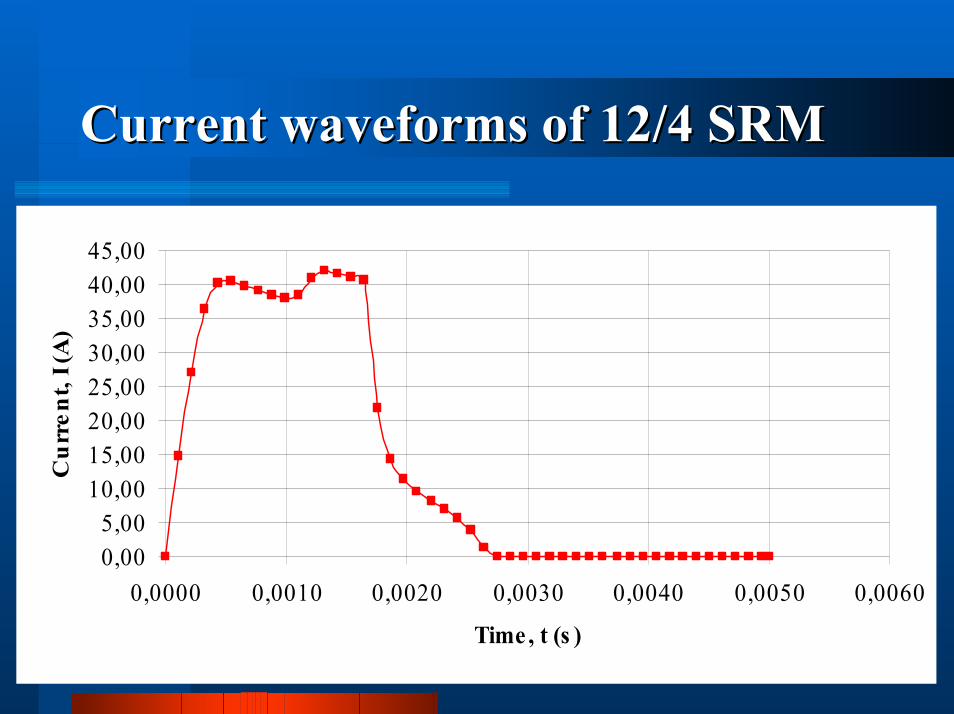
Current waveforms of 12/4 SRMCurrent waveforms of 12/4 SRM
0,005,00
10,0015,0020,0025,0030,0035,0040,0045,00
0,0000 0,0010 0,0020 0,0030 0,0040 0,0050 0,0060
Time , t (s )
Cu
rren
t, I (
A)
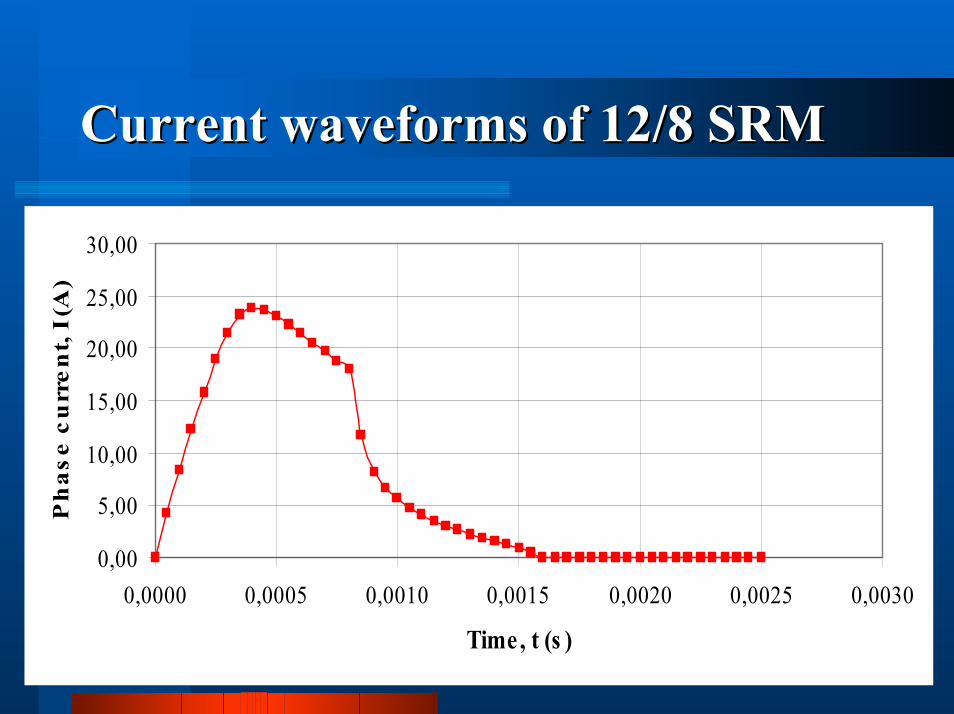
Current waveforms of 12/8 SRMCurrent waveforms of 12/8 SRM
0,00
5,00
10,00
15,00
20,00
25,00
30,00
0,0000 0,0005 0,0010 0,0015 0,0020 0,0025 0,0030
Time, t (s )
Ph
ase
curr
ent,
I (А
)
HarmonicHarmonic spectrum of the spectrum of the current current waveforms of 12/4 SRMwaveforms of 12/4 SRM
0 5 10 15 20 250
10
20
Harmonic number, k
Am
plitu
de o
f the
k-h
arm
onic
, I (A
)
25
0
Kk
251 k
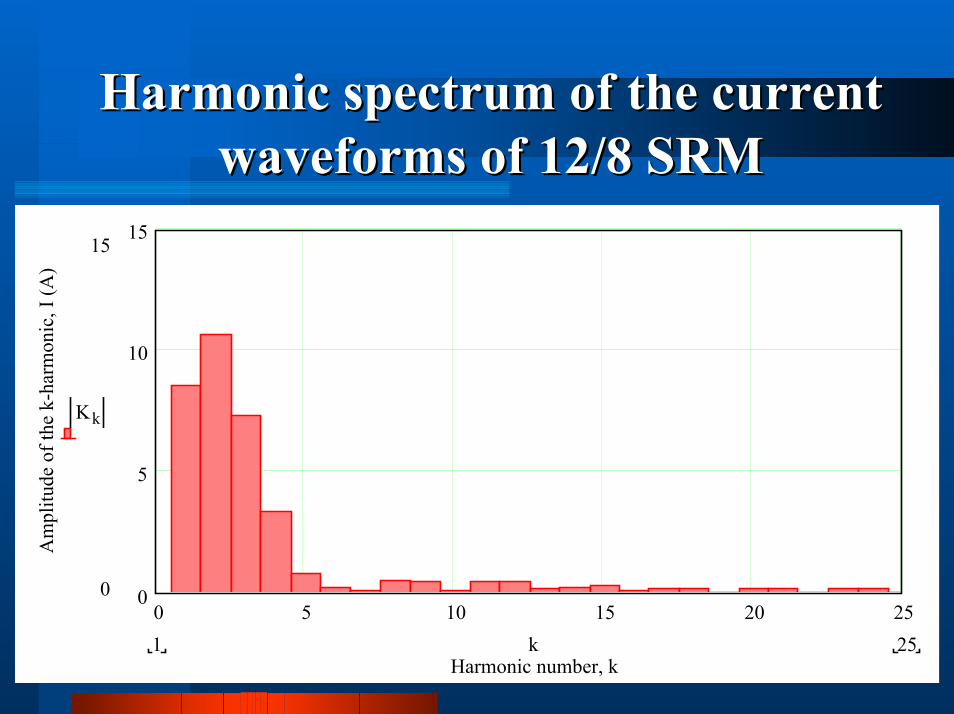
HarmonicHarmonic spectrum of the spectrum of the current current waveforms of 12/8 SRMwaveforms of 12/8 SRM
0 5 10 15 20 250
5
10
15
Harmonic number, k
Am
plitu
de o
f the
k-h
arm
onic
, I (A
)
15
0
Kk
251 k
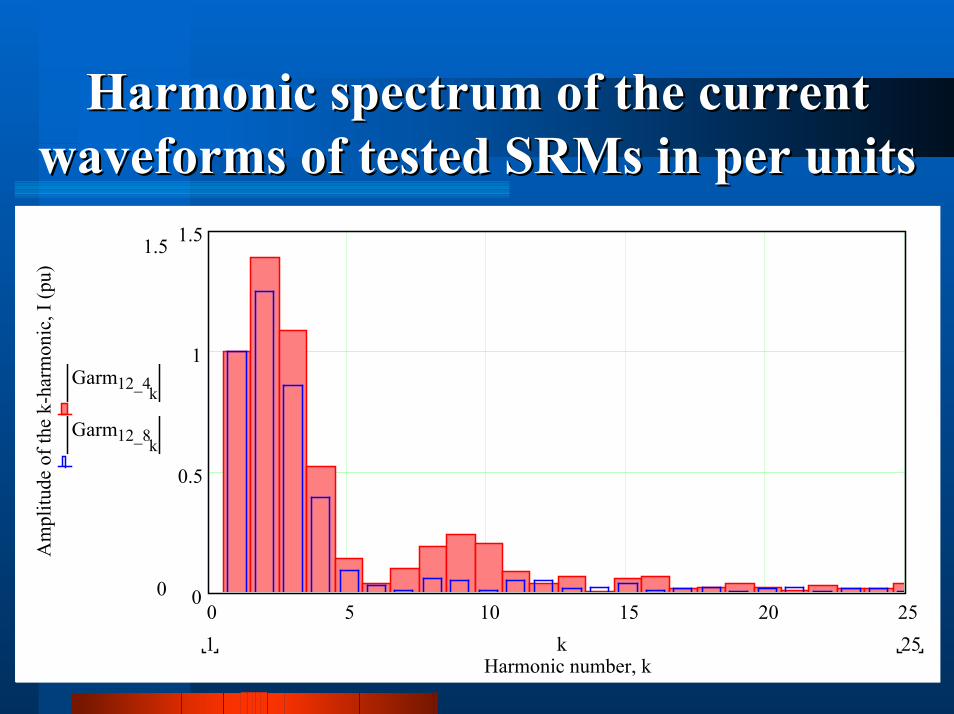
HarmonicHarmonic spectrum of the spectrum of the current current waveforms of tested waveforms of tested SRMsSRMs in per unitsin per units
0 5 10 15 20 250
0.5
1
1.5
Harmonic number, k
Am
plitu
de o
f the
k-h
arm
onic
, I (p
u)
1.5
0
Garm12_4k
Garm12_8k
251 k
ConclusionConclusionResearch results have shown that the new type
SRD:� supports more effective electromechanical
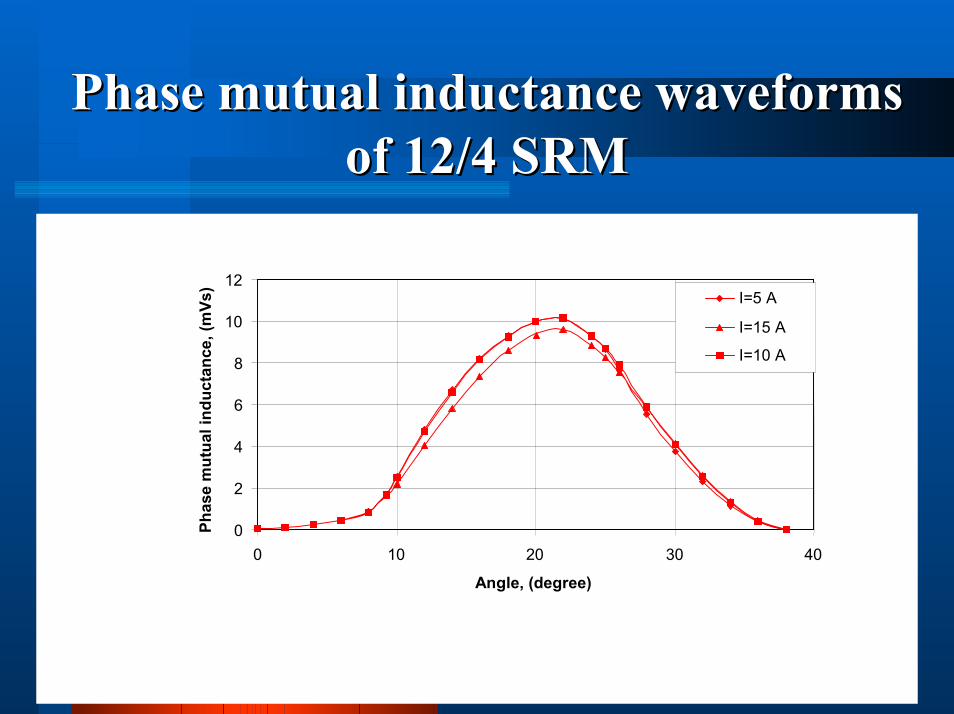
conversion of energy;� has more high mutual inductance;� has approximately two times lower average static
torque;� has two time lower voltage pulses frequency;� has approximately two time lower rated power;� has lower torque ripple;� has lower level vibrationthan the conventional SRD.
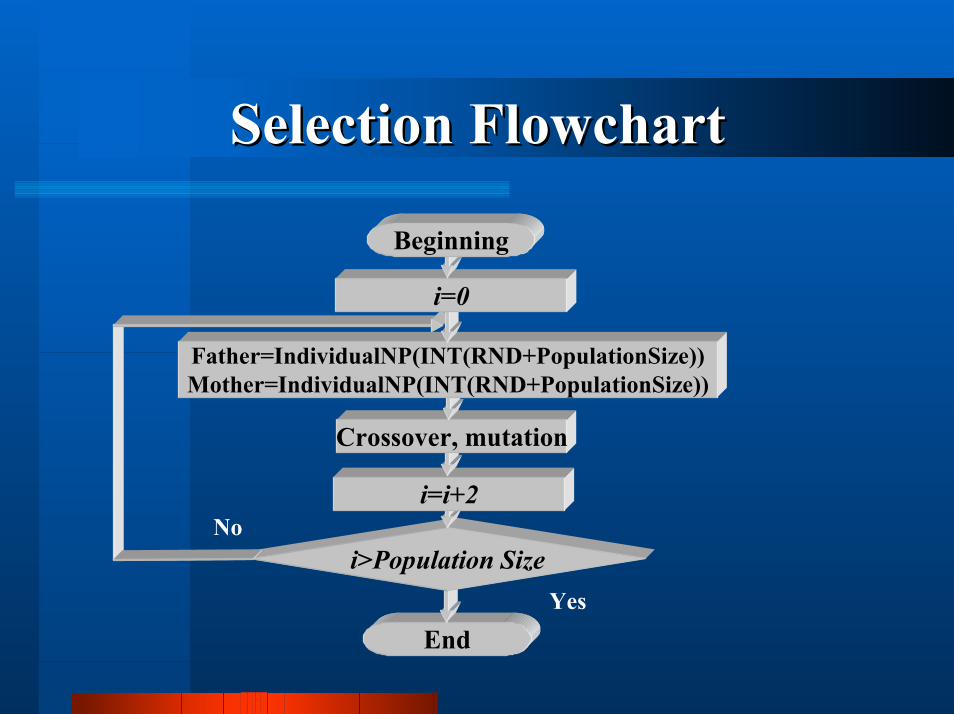
Optimization of SRM by Genetic Algorithm.Optimization of SRM by Genetic Algorithm.General Flowchart
End
Exit condition
Selection, crossover, mutation
General FlowchartBeginning
Prepare primary population
Yes
Calculation of population’s average cost function Generation of a new population
No
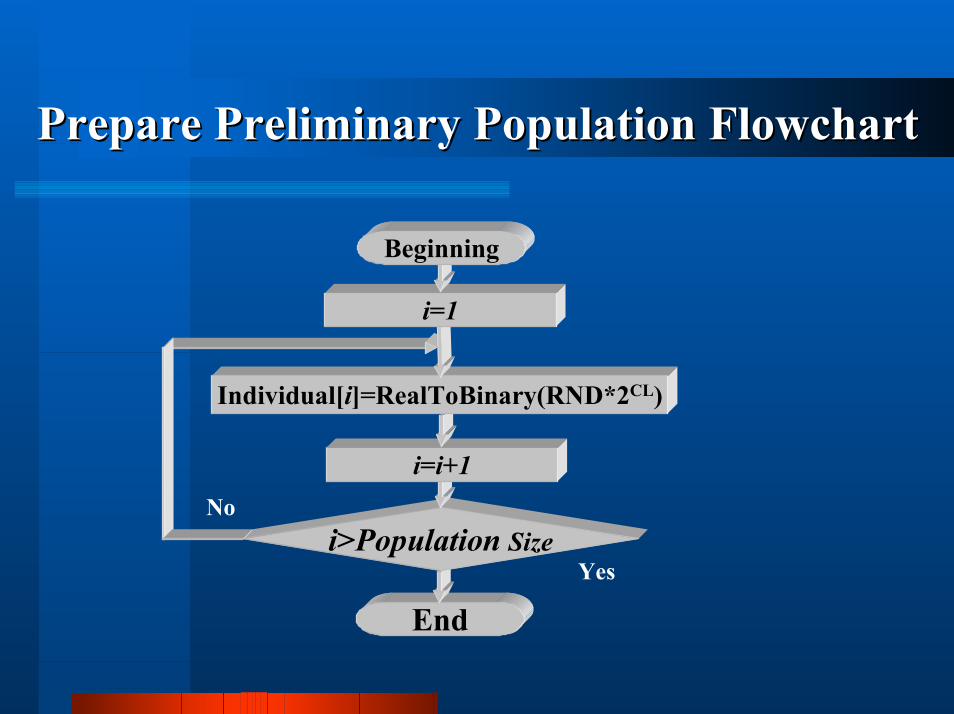
Prepare Preliminary Population Flowchart
End
i>Population Size
i=i+1
Individual[i]=RealToBinary(RND*2CL)
Prepare Preliminary Population Flowchart
Beginning
i=1
No
Yes
Calculation of population’s average cost function. Generation of a new population