Synchronization for general complex dynamical networks with sampled-data $ Nan Li , Yulian Zhang, Jiawen Hu, Zhenyu Nie College of Electromechanical Engineering, Zhejiang Ocean University, Zhoushan 316004, China article info Article history: Received 6 September 2010 Received in revised form 25 October 2010 Accepted 6 November 2010 Communicated by Z. Wang Available online 15 December 2010 Keywords: Complex networks Exponential synchronization Jensen’s inequality Linear matrix inequalities (LMIs) Sampled-data control abstract In this paper, the sampled-data synchronization control problem is investigated for a class of general complex networks with time-varying coupling delays. A rather general sector-like nonlinear function is used to describe the nonlinearities existing in the network. By using the method of converting the sampling period into a bounded time-varying delay, the addressed problem is first transformed to the problem of stability analysis for a differential equation with multiple time-varying delays. Then, by constructing a Lyapunov functional and using Jensen’s inequality, a sufficient condition is derived to ensure the exponential stability of the resulting delayed differential equation. Based on that, the desired sampled-data feedback controllers are designed in terms of the solution to certain linear matrix inequalities (LMIs) that can be solved effectively by using available software. Finally, a numerical simulation example is exploited to demonstrate the effectiveness of the proposed sampled-data control scheme. & 2010 Elsevier B.V. All rights reserved. 1. Introduction Complex dynamical networks are comprised a large set of nodes evolving according to their respective dynamical equations. Some of these nodes are usually coupled according to the network topology. In the real world, a large number of practical systems can be represented by models of complex networks, such as Internet, World Wide Web, food webs, electric power grids, cellular and metabolic networks, scientific citation networks, social net- works, etc. So far, the complex dynamical network has already been one of the most popular topics in the areas of scientific research. As we all know, the synchronization of all dynamical nodes is one of the most significant and interesting properties in a complex network. Therefore, the synchronization problem for complex dynamical networks has received increasing research attention, and a great deal of results have been available in the literature [1–3,7,9,11–15,18,19,21,22,26,29]. For example, the dynamical net- work model in terms of a differential equation with a coupling term has been proposed in [22], where the synchronization phenomenon of all dynamical nodes has been investigated for the considered net- works. Subsequently, some synchronization criteria have been estab- lished for a class of complex dynamical networks in [7,13], where the coupling delays have been taken into account. In [15], the synchro- nization problem has been investigated for an array of coupled complex discrete-time networks with the simultaneous presence of both the discrete and distributed time delays. In [14], the exponential synchronization problem has been studied for a class of stochastic delayed discrete-time complex networks and the corresponding synchronization criteria have been derived. Very recently, in [26], the global synchronization problem has been fully investigated for a class of discrete-time stochastic complex networks, where both randomly occurred nonlinearities and mixed time delays have been taken into account. Note that it is often the case that, for a complex network, all the behaviors of the dynamical nodes do not evolve synchronously. As such, it would be more interesting to study the condition that can guarantee the synchronization of all the nodes in complex net- works and how to achieve synchronization for an asynchronous complex network. A natural idea is to introduce a set of controllers to adjust the behaviors of the network nodes and accordingly achieve the network synchronization. This is referred to as the synchronization control problem. Some efforts have been made on this topic and various control schemes have been proposed. For example, in [31], an impulsive control scheme has been proposed to achieve synchronization for complex dynamical networks with unknown coupling, and the synchronization strategy considers the influence of all nodes in the dynamical network. In [28], the synchronization problem via pinning control has been studied and the derived pinning condition with controllers given in a high- dimensional setting can be reduced to a low-dimensional condition without the pinning controllers involved. In [33], the locally and globally adaptive synchronization control problems have been considered for an uncertain complex dynamical network and a set Contents lists available at ScienceDirect journal homepage: www.elsevier.com/locate/neucom Neurocomputing 0925-2312/$ - see front matter & 2010 Elsevier B.V. All rights reserved. doi:10.1016/j.neucom.2010.11.007 $ This work was supported by the Research Project of Zhejiang Ocean University under Grant X09Z4. Corresponding author. E-mail address: [email protected] (N. Li). Neurocomputing 74 (2011) 805–811
Transcript
Neurocomputing 74 (2011) 805–811
Contents lists available at ScienceDirect
Neurocomputing
0925-23
doi:10.1
$This
under G� Corr
E-m
journal homepage: www.elsevier.com/locate/neucom
Synchronization for general complex dynamical networks withsampled-data$
Nan Li �, Yulian Zhang, Jiawen Hu, Zhenyu Nie
College of Electromechanical Engineering, Zhejiang Ocean University, Zhoushan 316004, China
a r t i c l e i n f o
Article history:
Received 6 September 2010
Received in revised form
25 October 2010
Accepted 6 November 2010
Communicated by Z. Wangproblem of stability analysis for a differential equation with multiple time-varying delays. Then, by
In this paper, the sampled-data synchronization control problem is investigated for a class of general
complex networks with time-varying coupling delays. A rather general sector-like nonlinear function is
used to describe the nonlinearities existing in the network. By using the method of converting the
sampling period into a bounded time-varying delay, the addressed problem is first transformed to the
constructing a Lyapunov functional and using Jensen’s inequality, a sufficient condition is derived to
ensure the exponential stability of the resulting delayed differential equation. Based on that, the desired
sampled-data feedback controllers are designed in terms of the solution to certain linear matrix
inequalities (LMIs) that can be solved effectively by using available software. Finally, a numerical
simulation example is exploited to demonstrate the effectiveness of the proposed sampled-data control
scheme.
& 2010 Elsevier B.V. All rights reserved.
1. Introduction
Complex dynamical networks are comprised a large set of nodesevolving according to their respective dynamical equations. Someof these nodes are usually coupled according to the networktopology. In the real world, a large number of practical systemscan be represented by models of complex networks, such asInternet, World Wide Web, food webs, electric power grids, cellularand metabolic networks, scientific citation networks, social net-works, etc. So far, the complex dynamical network has already beenone of the most popular topics in the areas of scientific research. Aswe all know, the synchronization of all dynamical nodes is one ofthe most significant and interesting properties in a complexnetwork. Therefore, the synchronization problem for complexdynamical networks has received increasing research attention,and a great deal of results have been available in the literature[1–3,7,9,11–15,18,19,21,22,26,29]. For example, the dynamical net-work model in terms of a differential equation with a coupling termhas been proposed in [22], where the synchronization phenomenon ofall dynamical nodes has been investigated for the considered net-works. Subsequently, some synchronization criteria have been estab-lished for a class of complex dynamical networks in [7,13], where thecoupling delays have been taken into account. In [15], the synchro-nization problem has been investigated for an array of coupled
ll rights reserved.
of Zhejiang Ocean University
complex discrete-time networks with the simultaneous presence ofboth the discrete and distributed time delays. In [14], the exponentialsynchronization problem has been studied for a class of stochasticdelayed discrete-time complex networks and the correspondingsynchronization criteria have been derived. Very recently, in [26],the global synchronization problem has been fully investigated for aclass of discrete-time stochastic complex networks, where bothrandomly occurred nonlinearities and mixed time delays have beentaken into account.
Note that it is often the case that, for a complex network, all thebehaviors of the dynamical nodes do not evolve synchronously. Assuch, it would be more interesting to study the condition that canguarantee the synchronization of all the nodes in complex net-works and how to achieve synchronization for an asynchronouscomplex network. A natural idea is to introduce a set of controllersto adjust the behaviors of the network nodes and accordinglyachieve the network synchronization. This is referred to as thesynchronization control problem. Some efforts have been made onthis topic and various control schemes have been proposed. Forexample, in [31], an impulsive control scheme has been proposed toachieve synchronization for complex dynamical networks withunknown coupling, and the synchronization strategy considers theinfluence of all nodes in the dynamical network. In [28], thesynchronization problem via pinning control has been studiedand the derived pinning condition with controllers given in a high-dimensional setting can be reduced to a low-dimensional conditionwithout the pinning controllers involved. In [33], the locally andglobally adaptive synchronization control problems have beenconsidered for an uncertain complex dynamical network and a set
N. Li et al. / Neurocomputing 74 (2011) 805–811806
of adaptive controllers has been designed for the networksynchronization.
On the other hand, as the rapid development of computerhardware, the sampled-data control technology has shown moreand more superiority over other control approaches. The sampled-data control theory also has rapidly developed. It is worthwhile tomention that, in [5,6], a new approach to dealing with the sample-data control problems has been proposed by converting the samp-ling period into a time-varying but bounded delay. By followingthis idea, in [30], the exponential synchronization sampled-datacontrol problem has been studied for neural networks with time-varying mixed delays, while the robust sampled-data H1 controlproblem for vehicle active suspension systems has been investi-gated in [8]. To the best of our knowledge, so far, the sampled-datasynchronization control problem has not been considered for thecomplex networks yet. Therefore, in this paper, we aim to design aset of sampled-data feedback controllers to achieve the synchro-nization of a class of general asynchronous complex networks withtime-varying coupling delays. The contributions of this work can besummarized as follows: (1) we make the first attempt to addressthe sampled-data synchronization control problem for a class ofgeneral complex networks with time-varying coupling delays; (2) asynchronization criterion depending on the sampling period is obtai-ned by constructing an appropriate Lyapunov functional and usingJensen’s inequality; and (3) a set of sampled-data feedback controllersis designed that can achieve the synchronization of the consideredcomplex network.
The remainder of this paper is organized as follows. Theexponential sampled-data synchronization control problem forcomplex networks with time-varying coupling delays is formu-lated in Section 2. In Section 3, a exponential synchronizationcriterion is derived and a set of sampled-data feedback controllersis designed for the considered complex network. An illustrativeexample is provided to show the effectiveness of the proposedsampled-data control scheme in Section 4. Finally, conclusions aregiven in Section 5.
Notation: The notation used here is fairly standard except whereotherwise stated. Rn denotes the n-dimensional Euclidean space.JAJ refers to the norm of a matrix A defined by JAJ¼
The notation XZY (respectively, X4Y), where X and Y are realsymmetric matrices, means that X�Y is positive semi-definite(respectively, positive definite). MT represents the transpose of thematrix M. I denotes the identity matrix of compatible dimension.
diagf� � �g stands for a block-diagonal matrix and the notation
diagnf�g is employed to stand for diagf�, . . . ,�zfflfflfflffl}|fflfflfflffl{n
g. Moreover, theasterisk � in a matrix is used to denote term that is induced bysymmetry. Matrices, if they are not explicitly specified, areassumed to have compatible dimensions.
2. Problem formulation and preliminaries
Consider a complex dynamical network consisting of N identicalcoupled nodes as follows:
_xiðtÞ ¼ f ðxiðtÞÞþcXN
j ¼ 1
GijAxjðt�tðtÞÞþuiðtÞ, i¼ 1,2, . . . ,N, ð1Þ
where xiðtÞARn and uiðtÞARn are, respectively, the state variableand the control input of the node i. f : Rn-Rn is a continuousvector-valued function. The scalar tðtÞ denotes the time-varyingdelay satisfying
0rtðtÞrm, _tðtÞrn, ð2Þ
where m and n are known positive constants. c40 is the couplingstrength, A¼ ðaijÞn�nARn�n is a constant inner-coupling matrix of
the nodes, and G¼ ðGijÞN�N is the outer-coupling matrix of thenetwork, where Gij is defined as follows: if there is a connectionbetween node i and node j ðja iÞ, then Gij¼Gji¼1; otherwise,Gij¼Gji¼0, and the diagonal elements of matrix G are defined by
Gii ¼�XN
j ¼ 1,ja i
Gij ¼�XN
j ¼ 1,ja i
Gji, i¼ 1,2, . . . ,N:
We denote the synchronization error by ei(t)¼xi (t)�s(t) wheresðtÞARn is the state trajectory of the unforced isolate node_sðtÞ ¼ f ðsðtÞÞ. Then, the error dynamics of complex network (1)can be obtained as follows:
_eiðtÞ ¼ gðeiðtÞÞþcXN
j ¼ 1
GijAejðt�tðtÞÞþuiðtÞ, i¼ 1,2, . . . ,N, ð3Þ
where gðeiðtÞÞ ¼ f ðxiðtÞÞ�f ðsðtÞÞ.In this paper, the following feedback controllers are adopted:
uiðtÞ ¼ KieiðtÞ, i¼ 1,2, . . . ,N,
where Ki is the feedback gain to be determined, and uiðtÞARn is acontinuous signal that will be sampled before it enters the complexnetwork.
For every i (i¼1,2,y,N), the sampled control input ui(t) isassumed to be generated by a zero-order hold function with asequence of hold times 0¼ t0ot1o � � �otko � � �
uiðtÞ ¼ uiðtkÞ ¼ KieiðtkÞ, tkrtotkþ1, ð4Þ
where tk denotes the sampling instant and satisfies limk-1tk ¼1.Moreover, the sampling period under consideration is assumed tobe bounded by a known constant p40, that is, tkþ1�tkrp for kZ0.
Remark 1. Note that the sampling periods considered here areonly required to be bounded, which means that the sampled-datafeedback controllers (4) can effectively deal with the case when thesampling periods are time varying. In this paper, we assume thatthe control inputs from all nodes are sampled by one sampler. It isworth pointing out that, in the case of multiple samplers, theproposed control approach is still feasible.
Define a sawtooth function as follows:
dðtÞ ¼ t�tk, tkrtotkþ1:
It is easily seen that
0odðtÞop, ð5Þ
and the control input of node i can be rewritten as
uiðtÞ ¼ Kieiðt�dðtÞÞ:
Consequently, the closed-loop error system of the complexnetwork (1) is obtained as follows:
_eiðtÞ ¼ gðeiðtÞÞþcXN
j ¼ 1
GijAejðt�tðtÞÞþKieiðt�dðtÞÞ, i¼ 1,2, . . . ,N,
ð6Þ
which can be further rewritten as the following compact form:
where U and V are constant matrices of appropriate dimensions.
N. Li et al. / Neurocomputing 74 (2011) 805–811 807
Remark 2. The nonlinearity description in (8) is quite general thatincludes the commonly Lipchitz condition and norm-boundedcondition as special cases. The examples of the application of sucha sector-like nonlinearity include the active function in geneticregulatory networks [25] and the quantization function in net-worked control systems [20].
We are now in a position to introduce the notion of exponentialsynchronization for the complex network (1).
Definition 1. The complex network (1) is said to be exponentiallysynchronized if the closed-loop error system (7) is exponentiallytable, i.e., there exist two constants a40 and b40 such that
JeðtÞJ2rae�bt sup�rryr0
JfðyÞJ2,
where r¼maxfm,pg and fð�Þ is the initial function of system (7)defined as eðtÞ ¼fðtÞ, tA ½�r,0�.
The main purpose of this paper is to design a set of controllerswith the form (4) to achieve the exponential synchronization of thecomplex network (1). In other words, we are interested in finding aset of feedback gain matrices Ki such that the error system (7) isexponentially stable.
Remark 3. Note that the coupling delays in (1) are time-varying,and hence the network model (1) generalizes the existing ones in[7,13]. Moreover, it should be mentioned that, to the best of ourknowledge, the sampled-data synchronization control problem forsuch a complex network with time-varying coupling delays has notbeen well studied yet.
3. Main results
In this section, we first analyze the stability and deriving thecorresponding exponential stability condition for the error sys-tem (7). Then, the sampled-data feedback controllers are desig-ned to achieve the exponential synchronization of the complexnetwork (1).
The following lemma will be used to derive our main results.
Lemma 1 (Jensen’s inequality [10]). For any constant matrix RARn�n, R¼ RT 40, scalar b40, and vector function x : ½0,b�-Rn,one has
b
Z b
0xT ðsÞRxðsÞ dsZ
Z b
0xðsÞ ds
!T
R
Z b
0xðsÞ ds
!
provided that the above integrals are well defined.
In the following theorem, a sufficient condition is given underwhich the error system (7) is exponentially stable.
Theorem 1. Let the controller gain Ki (i¼1,2,y,N) be given. The error
system (7) is exponentially stable if there exist matrices P40, Qi40,Zi40 (i¼1,2,3) and a scalar l40 such that
Z2þð1�nÞZ340 ð9Þ
and
O11 PKþ1pZ1 0 O14 0 P�l ~VL 0
� �2pZ1
1pZ1 0 0 0 KT
� � �Q1�1pZ1 0 0 0 0
� � � O441mZ2 0 cðG� AÞT
� � � � �Q2�1mZ2 0 0
� � � � � �lI I
� � � � � � �R�1
26666666666664
37777777777775o0,
ð10Þ
where
O11 ¼ Q1þQ2þQ3�1
pZ1�
1
m ðZ2þð1�nÞZ3Þ�l ~UL,
O14 ¼ cPðG� AÞþ1
m ðZ2þð1�nÞZ3Þ,
O44 ¼�ð1�nÞQ3�1
m ðZ2þð1�nÞZ3Þ�1
m Z2,
R¼ pZ1þmZ2þmZ3,
~UL ¼UTLVLþVT
LUL
2, ~VL ¼�
UTLþVT
L2
,
UL ¼ diagNfUg, VL ¼ diagNfVg: ð11Þ
Proof. Construct the following Lyapunov functional:
VðetÞ ¼ eT ðtÞPeðtÞþ
Z t
t�peT ðsÞQ1eðsÞ dsþ
Z t
t�meT ðsÞQ2eðsÞ ds
þ
Z t
t�tðtÞeT ðsÞQ3eðsÞ dsþ
Z 0
�p
Z t
tþy_eTðsÞZ1 _eðsÞ ds dy
þ
Z 0
�m
Z t
tþy_eTðsÞZ2 _eðsÞ ds dyþ
Z 0
�tðtÞ
Z t
tþy_eTðsÞZ3 _eðsÞ ds dy
where P, Qi and Zi (i¼1,2,3) are the solutions to matrix inequalities(9)–(10).
Calculating the time derivative of V(et) along the trajectory of
system (7) and considering (2), one has_V ðetÞr2eT ðtÞP _eðtÞþeT ðtÞðQ1þQ2þQ3ÞeðtÞ�eT ðt�pÞQ1eðt�pÞ�eT ðt�mÞQ2eðt�mÞ
xðtÞ ¼ ½eT ðtÞ eT ðt�dðtÞÞ eT ðt�pÞ eT ðt�tðtÞÞ eT ðt�mÞ ~gTðeðtÞÞ�T ,
it can be obtained from (12)–(14) that
_V ðetÞrxTðtÞðFþFT RFÞxðtÞ, ð15Þ
N. Li et al. / Neurocomputing 74 (2011) 805–811808
where
F¼
O11 PKþ1pZ1 0 O14 0 P
� �2pZ1
1pZ1 0 0 0
� � �Q1�1pZ1 0 0 0
� � � O441mZ2 0
� � � � �Q2�1mZ2 0
� � � � � 0
2666666666664
3777777777775
,
O11 ¼ Q1þQ2þQ3�1
pZ1�
1
mðZ2þð1�nÞZ3Þ,
F ¼ ½0 K 0 cðG� AÞ 0 I�,
and O14, O44 and R are defined in (11).
From (8), it is not difficult to verify that the nonlinear function
~gðeðtÞÞ satisfies
eðtÞ
~gðeðtÞÞ
" #T ~UL~VL
� I
" #eðtÞ
~gðeðtÞÞ
" #r0, ð16Þ
where ~UL and ~VL are also defined in (11).
Consequently, for any scalar l40, it follows readily from (15)
and (16) that
_V ðetÞrxTðtÞðFþFT RFÞxðtÞ�l
eðtÞ
~g ðeðtÞÞ
" #T ~UL~VL
� I
" #eðtÞ
~g ðeðtÞÞ
" #
¼ xTðtÞðFþFT RFÞxðtÞ,
where
F ¼
O11 PKþ1pZ1 0 O14 0 P�l ~VL
� �2pZ1
1pZ1 0 0 0
� � �Q1�1pZ1 0 0 0
� � � O441mZ2 0
� � � � �Q2�1mZ2 0
� � � � � �lI
2666666666664
3777777777775
,
and O11 is defined in (11).
By using the Schur complement formula, it can be seen that the
inequality (10) is equivalent to FþFT RFo0, which implies_V ðetÞr�eJeðtÞJ2 where e¼�lmaxðFþFT RFÞ. Then, using a method
similar to the proof of Theorem 1 in [16], we can show the
exponential stability of system (7). This completes the proof of
Theorem 1. &
Remark 4. In Theorem 1, the stability analysis has been conductedby constructing an appropriate Lyapunov functional and usingJensen’s inequality (Lemma 1). It should be mentioned that somenewly developed approaches to dealing with time-delays can beemployed to further reduce the conservatism of the stabilitycondition. Research on deriving some less conservative resultsfor the sample-data control problem by using the delay-fractioningapproach [4,32] would be one of our future topics.
In the following, we will deal with the controller designproblem, and derive the explicit expression of the controller gainmatrices in terms of LMIs. The following theorem can be obtainedfrom Theorem 1.
Theorem 2. The complex network (1) is exponentially synchronized
by the sampled-data feedback controllers (4) if there exist matrices
P¼ diagfP1,P2, . . . ,PNg40, Qi40, Zi40 (i¼1,2,3), X ¼ diagfX1,X2, . . . ,XNg and a scalar l40 such that
Z2þð1�nÞZ340 ð17Þ
and
O11 Xþ1pZ1 0 O14 0 P�l ~VL 0
� �2pZ1
1pZ1 0 0 0 XT
� � �Q1�1pZ1 0 0 0 0
� � � O441mZ2 0 cðG� AÞT P
� � � � �Q2�1mZ2 0 0
� � � � � �lI P
� � � � � � �2PþR
266666666666664
377777777777775o0,
ð18Þ
where O11, O14, O44, R, and ~VL are defined in Theorem 1. Moreover, if
the LMIs (17) and (18) are solvable, the desired controllers gain
matrices are given as
Ki ¼ P�1i Xi, i¼ 1,2, . . . ,N: ð19Þ
Proof. By considering the inequality�PR�1Pr�2PþR, the LMI (18)implies
O11 Xþ1pZ1 0 O14 0 P�l ~VL 0
� �2pZ1
1pZ1 0 0 0 XT
� � �Q1�1pZ1 0 0 0 0
� � � O441mZ2 0 cðG� AÞT P
� � � � �Q2�1mZ2 0 0
� � � � � �lI P
� � � � � � �PR�1P
266666666666664
377777777777775o0:
ð20Þ
Then, noting the relation X¼PK and performing a congruence
transformation of diag{I, I, I, I, I, I, P�1} to the LMI (20), we
obtain the LMI (10). The rest of the proof follows directly from
Theorem 1. &
To this end, the sampled-data synchronization control problemaddressed in previous section has been solved in terms of a solution tothe LMIs (17) and (18). According to Theorem 2, the controllers givenby (20) can achieve the exponential synchronization of the complexnetwork (1) with sampled data. It should be pointed out that the mainresults obtained in this paper can be extended to complex networkswith various time-delays such as mixed time-delays [17,23] anddistributed delays [24,27]. In next section, the effectiveness of thedeveloped sampled-data control approach is shown by a numericalsimulation example.
4. An illustrative example
In this section, a simulation example is presented to demon-strate the effectiveness of the proposed synchronization controlscheme for the complex network (1).
Consider a complex network (1) with three nodes. The outer-coupling matrix is assumed to be G¼ ðGijÞ3�3 with
Gij ¼
�1 0 1
0 �1 1
1 1 �2
264
375:
The inner-coupling matrix and coupling strength are given asA¼diag{1,1,1} and c¼0.5, respectively. The time-varying delay ischosen as tðtÞ ¼ 0:2þ0:05sinð10tÞ. Accordingly, we have m¼ 0:25and n¼ 0:5.
The nonlinear function f ð�Þ is taken as
f ðxiÞ ¼�0:5xi1þtanhð0:2xi1Þþ0:2xi2
0:95xi2�tanhð0:75xi2Þ
" #, i¼ 1,2,3:
N. Li et al. / Neurocomputing 74 (2011) 805–811 809
It can be easily verified that f ð�Þ satisfies (8) with
U ¼�0:5 0:2
0 0:95
� �, V ¼
�0:3 0:2
0 0:2
� �: ð21Þ
In this example, we set the sampling period as p ¼ 0.02. By usingthe Matlab (with YALMIP 3.0 and SeDuMi 1.1), the LMIs (17) and(18) can be solved and a feasible solution is given by
P1¼0:8117 �0:0670
�0:0670 0:4922
� �, P2¼
0:8118 �0:0670
�0:0670 0:4922
� �,
P3¼0:8029 �0:0684
�0:0684 0:5016
� �,
Q1 ¼
0:4120 �0:0226 �0:0236 0:0018 �0:0809 0:0046
�0:0226 0:2545 0:0018 0:0066 0:0022 �0:1007
�0:0236 0:0018 0:4121 �0:0226 �0:0809 0:0046
0:0018 0:0066 �0:0226 0:2545 0:0022 �0:1007
�0:0809 0:0022 �0:0809 0:0022 0:4142 �0:0205
0:0046 �0:1007 0:0046 �0:1007 �0:0205 0:2668
2666666664
3777777775
,
Q2 ¼
0:4095 �0:0262 �0:0100 �0:0007 �0:0718 0:0093
�0:0262 0:2433 �0:0007 �0:0044 0:0093 �0:0562
�0:0100 �0:0007 0:4095 �0:0263 �0:0717 0:0093
�0:0007 �0:0044 �0:0263 0:2433 0:0093 �0:0562
�0:0718 0:0093 �0:0717 0:0093 0:4285 �0:0315
0:0093 �0:0562 0:0093 �0:0562 �0:0315 0:2450
2666666664
3777777775
,
Q3 ¼
0:4462 �0:0331 0:0164 �0:0065 �0:1164 0:0175
�0:0331 0:2271 �0:0065 �0:0027 0:0182 �0:0594
0:0164 �0:0065 0:4462 �0:0331 �0:1164 0:0175
�0:0065 �0:0027 �0:0331 0:2271 0:0182 �0:0594
�0:1164 0:0182 �0:1164 0:0182 0:5115 �0:0469
0:0175 �0:0594 0:0175 �0:0594 �0:0469 0:2255
2666666664
3777777775
,
0 1 20
50
100
T
x 11 a
nd s
1
0 1 2−100
0
100
T
x 21 a
nd s
1
0 1 20
50
100
T
x 31 a
nd s
1
Fig. 1. State xi1 of the uncontrolle
Z1 ¼
0:0189 0:0010 0:0012 0:0001 0:0011 0:0002
0:0010 0:0348 0:0001 0:0033 0:0003 0:0034
0:0012 0:0001 0:0189 0:0010 0:0011 0:0002
0:0001 0:0033 0:0010 0:0348 0:0003 0:0034
0:0011 0:0003 0:0011 0:0003 0:0163 0:0010
0:0002 0:0034 0:0002 0:0034 0:0010 0:0307
2666666664
3777777775
,
Z2 ¼
0:1658 0:0006 0:0093 �0:0009 �0:0120 0:0021
0:0006 0:1851 �0:0010 0:0119 0:0020 �0:0139
0:0093 �0:0010 0:1658 0:0006 �0:0120 0:0021
�0:0009 0:0119 0:0006 0:1851 0:0020 �0:0139
�0:0120 0:0020 �0:0120 0:0020 0:1906 �0:0022
0:0021 �0:0139 0:0021 �0:0139 �0:0022 0:2162
2666666664
3777777775
,
Z3 ¼
0:3918 �0:0146 �0:0168 �0:0003 �0:0187 0:0114
�0:0146 0:3137 �0:0003 �0:0399 0:0076 0:0294
�0:0168 �0:0003 0:3918 �0:0146 �0:0187 0:0114
�0:0003 �0:0399 �0:0146 0:3137 0:0076 0:0294
�0:0187 0:0076 �0:0187 0:0076 0:4214 �0:0230
0:0114 0:0294 0:0114 0:0294 �0:0230 0:3317
2666666664
3777777775
,
X1 ¼�0:5196 �0:0137
�0:0137 �0:8443
� �, X2 ¼
�0:5197 �0:0136
�0:0136 �0:8442
� �,
X3 ¼�0:2854 �0:0245
�0:0245 �0:6364
� �,
l¼ 1:5020: ð22Þ
Therefore, the gain matrices of the desired controllers can beobtained as follows:
K1 ¼ P�11 X1 ¼
�0:6497 �0:1602
�0:1162 �1:7369
� �,
K2 ¼ P�12 X2 ¼
�0:6498 �0:1602
�0:1162 �1:7369
� �,
3 4 5 6ime (t)
3 4 5 6ime (t)
3 4 5 6ime (t)
d complex network (i¼1,2,3).
N. Li et al. / Neurocomputing 74 (2011) 805–811810
K3 ¼ P�13 X3 ¼
�0:3638 �0:1402
�0:0984 �1:2877
� �: ð23Þ
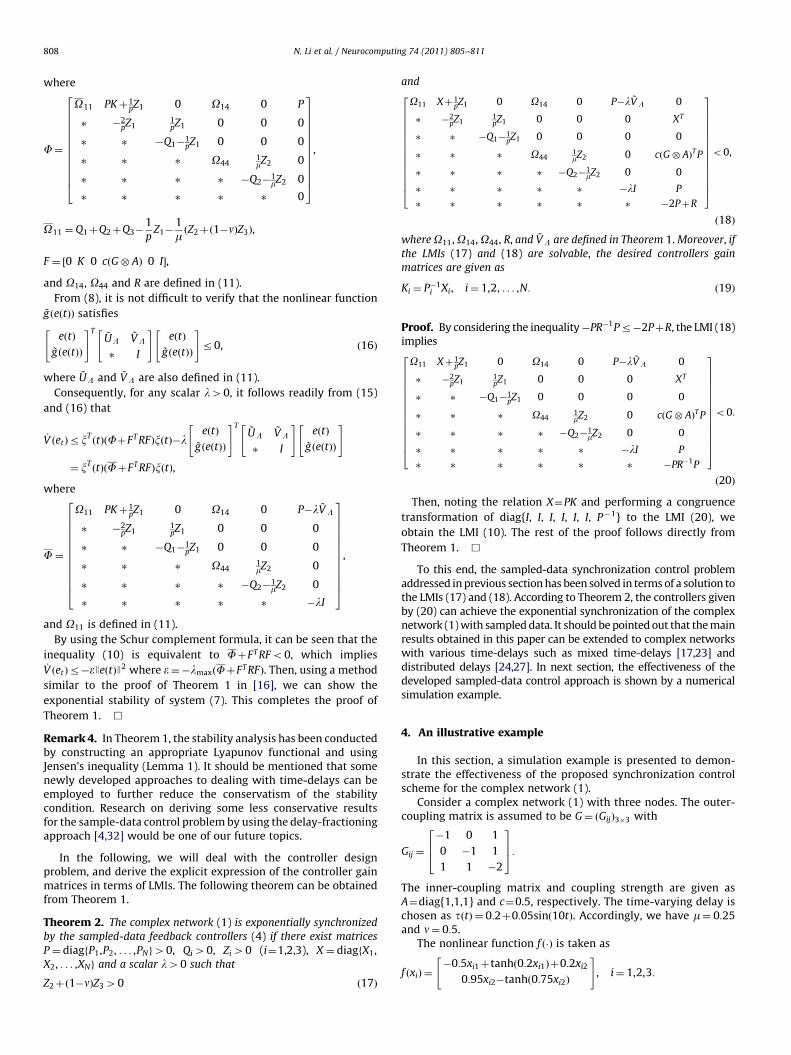
In the simulation, we set the initial values of the consideredthree nodes and the unforced isolate node as x1ð0Þ ¼ ½4 3�T ,x2ð0Þ ¼ ½�2 �1�T , x3ð0Þ ¼ ½2 5�T and Sð0Þ ¼ ½1 0�T , respectively.Simulation results are presented in Figs. 1–4. Figs. 1 and 2 plotthe state trajectories of the complex network in the case of controlinput-free while the state trajectories of the controlled complexnetwork are shown in Figs. 3 and 4. From the simulation results, itcan be seen that the designed sampled-data feedback controllersachieve the exponential synchronization of the considered com-plex network well.
0 1 20
500
T
x 12 a
nd s
2
0 1 2−500
0
500
T
x 22 a
nd s
2
0 1 20
500
T
x 32 a
nd s
2
Fig. 2. State xi2 of the uncontrolle
0 5 10 15−4
−3
−2
−1
0
1
2
3
4
5
Time (t)
s1(t)
x11(t)
x21(t)
x31(t)
Fig. 3. State xi1 of the controlled complex network (i¼1,2,3).
5. Conclusions
In this paper, we have studied the sampled-data synchroniza-tion control problem for a class of general complex networks withtime-varying coupling delays. The addressed problem has firstbeen transformed to the problem of stability analysis for adifferential equation with multiple time-varying delays by con-verting the sampling period into a bounded time-varying delay.Then, by constructing an appropriate Lyapunov functional andusing Jensen’s inequality, an exponential stability criterion hasbeen obtained for the resulting delayed differential equation. Basedon that, the desired sampled-data feedback controllers have beendesigned in terms of the solution to certain LMIs. Finally, theeffectiveness of the proposed sampled-data control scheme hasbeen demonstrated by a numerical simulation example.
3 4 5 6ime (t)
3 4 5 6ime (t)
3 4 5 6ime (t)
d complex network (i¼1,2,3).
0 5 10 15−4
−3
−2
−1
0
1
2
3
4
5
Time (t)
s2(t)
x12(t)
x22(t)
x32(t)
Fig. 4. State xi2 of the controlled complex network (i¼1,2,3).
N. Li et al. / Neurocomputing 74 (2011) 805–811 811
References
[1] A. Arenas, A. Diaz-Guilera, C. Perez-Vicente, Synchronization processes incomplex networks, Physica D-Nonlinear Phenomena 224 (1–2) (2006) 27–34.
[2] F. Atay, T. Biyikoglu, Graph operations and synchronization of complexnetworks, Physical Review E 72 (1, Part 2) Art. No. 016217.
[3] P. De Lellis, M. di Bernardo, F. Garofalo, Synchronization of complex networksthrough local adaptive coupling, Chaos 18 (3) Art. No. 037110.
[4] B. Du, J. Lam, Stability analysis of static recurrent neural networks using delay-partitioning and projection, Neural Networks 22 (4) (2009) 343–347.
[5] E. Fridman, A. Seuret, J.P. Richard, Robust sampled-data stabilization of linearsystems: an input delay approach, Automatica 40 (8) (2004) 1441–1446.
[6] E. Fridman, U. Shaked, V. Suplin, Input/output delay approach to robustsampled-data H1 control, Systems & Control Letters 54 (3) (2005) 271–282.
[7] H. Gao, J. Lam, G. Chen, New criteria for synchronization stability of generalcomplex dynamical networks with coupling delays, Physics Letters A 360 (2)(2006) 263–273.
[8] H. Gao, W. Sun, P. Shi, Robust sampled-data H1 control for vehicle activesuspension systems, IEEE Transactions on Control Systems Technology 18 (1)(2010) 238–245.
[9] J. Gomez-Gardenes, Y. Moreno, A. Arenas, Paths to synchronization on complexnetworks, Physical Review Letters 98 (3) Art. No. 034101.
[10] K. Gu, An integral inequality in the stability problem of time-delay systems, in:Proceedings 39th IEEE Conference on Decision and Control, Sydney, Australia,December 2000, pp. 2805–2810.
[11] D. Hwang, M. Chavez, A. Amann, et al., Synchronization in complex networkswith age ordering, Physical Review Letters 94 (13) Art. No. 138701.
[12] G. Korniss, Synchronization in weighted uncorrelated complex networks in anoisy environment: optimization and connections with transport efficiency,Physical Review E 75 (5, Part 1) Art. No. 051121.
[13] C. Li, G. Chen, Synchronization in general complex dynamical networks withcoupling delays, Physica A—Statistical Mechanics and its Applications 343(November) (2004) 263–278.
[14] J. Liang, Z. Wang, X. Liu, Exponential synchronization of stochastic delayeddiscrete-time complex networks, Nonlinear Dynamics 53 (1–2) (2008) 153–165.
[15] Y. Liu, Z. Wang, J. Liang, X. Liu, Synchronization and state estimation fordiscrete-time complex networks with distributed delays, IEEE Transactions onSystems, Man and Cybernetics—Part B 38 (5) (2008) 1314–1325.
[16] Y. Liu, Z. Wang, X. Liu, Global exponential stability of generalized recurrentneural networks with discrete and distributed delays, Neural Networks 19 (5)(2006) 667–675.
[17] Y. Liu, Z. Wang, X. Liu, On global exponential stability of generalized stochasticneural networks with mixed time-delays, Neurocomputing 70 (1–3) (2006)314–326.
[18] J. Lu, G. Chen, A time-varying complex dynamical network model and itscontrolled synchronization criteria, IEEE Transactions on Automatic Control50 (6) (2005) 841–846.
[19] K. Park, Y. Lai, S. Gupte, et al., Synchronization in complex networks with amodular structure, Chaos 16 (1) Art. No. 015105.
[20] B. Shen, Z. Wang, H. Shu, G. Wei, Robust H1 finite-horizon filtering withrandomly occurred nonlinearities and quantization effects, Automatica 46 (11)(2010) 1743–1751.
[21] F. Sorrentino, E. Ott, Adaptive synchronization of dynamics on evolvingcomplex networks, Physical Review Letters 100 (11) Art. No. 114101.
[22] X. Wang, G. Chen, Synchronization in small-world dynamical networks,International Journal of Bifurcation and Chaos 12 (1) (2002) 187–192.
[23] Z. Wang, Y. Liu, X. Liu, Exponential stabilization of a class of stochastic systemwith Markovian jump parameters and mode-dependent mixed time-delays,IEEE Transactions on Automatic Control 55 (4) (2010) 1656–1662.
[24] Z. Wang, Y. Liu, G. Wei, X. Liu, A note on control of a class of discrete-timestochastic systems with distributed delays and nonlinear disturbances, Auto-matica 46 (3) (2010) 543–548.
[25] Y. Wang, Z. Wang, J. Liang, Y. Li, M. Du, Synchronization of stochastic geneticoscillator networks with time delays and Markovian jumping parameters,Neurocomputing 73 (13–15) (2010) 2532–2539.
[26] Z. Wang, Y. Wang, Y. Liu, Global synchronization for discrete-time stochasticcomplex networks with randomly occurred nonlinearities and mixed timedelays, IEEE Transactions on Neural Networks 21 (1) (2010) 11–25.
[27] Z. Wang, G. Wei, G. Feng, Reliable H1 control for discrete-time piecewise linearsystems with infinite distributed delays, Automatica 45 (12) (2009) 2991–2994.
[28] W. Yu, G. Chen, J. Lu, On pinning synchronization of complex dynamicalnetworks, Automatica 45 (2) (2009) 429–435.
[29] D. Yue, H. Li, Synchronization stability of continuous/discrete complexdynamical networks with interval time-varying delays, Neurocomputing73 (4–6) (2010) 809–819.
[30] C.K. Zhang, Y. He, M. Wu, Exponential synchronization of neural networks withtime-varying mixed delays and sampled-data, Neurocomputing 74 (1–3)(2010) 265–273.
[31] G. Zhang, Z. Liu, Z. Ma, Synchronization of complex dynamical networks viaimpulsive control, Chaos 17 (4) Art. No. 043126.
[32] Y. Zhao, H. Gao, J. Lam, B. Du, Stability and stabilization of delayed T–S fuzzysystems: a delay partitioning approach, IEEE Transactions on Fuzzy Systems17 (4) (2009) 750–762.
[33] J. Zhou, J. Lu, J. Lu, Adaptive synchronization of an uncertain complex dynamicalnetwork, IEEE Transactions on Automatic Control 51 (4) (2006) 652–656.
Nan Li received her master degree in Control Theoryand Control Engineering from Zhejiang University ofTechnology in 2009. Now she is a lecturer at ZhejiangOcean University. Her research interests include neuralnetworks, complex networks, nonlinear systems andbioinformatics.
Yulian Zhang received her master degree in Engineer-ing Mechanics from Xi’an Jiaotong University in 2002.Now she is a professor at Zhejiang Ocean University. Herresearch interests include complex networks, fluiddynamics and structural optimization.
Jiawen Hu received his bachelor degree in MechanicalDesign, Manufacturing and Automation from ZhejiangOcean University in 2003. Now he is a technician atZhejiang Ocean University. His research interests includemicrocontroller technology and electronic technology.
Zhenyu Nie received his master degree in PowerElectronics from Nanchang University in 2005. Now heis a lecturer at Zhejiang Ocean University. His researchinterests include the development of power electronicsdevice of shipping.