26

C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010
• Aligning the time scales between two or more processes
• Necessary convention for the aggregation of human behaviors
• Key element for the evolution of human beings
What is Synchronization?
• Necessity of a finer synchronization grown together with the increased possibilities enabled by modern technologies
• Synchronization has strained from a powerful concept to a critical and harmful design issue
But in the last years…
• Iterative approaches and a very strict combining between equalization and synchronization
• Novel aiding paradigms
• Synchronization in every bandwidth and with any possible standard
What about the future of
synchronization?
• From the social perspective, synchronization will come back to be the main aspect for national or international identity
• Future technological innovations will push the limits of globalization, and synchronization will become the effective common point for human collaboration and cooperation
… and the future of the world?
C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010
C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010
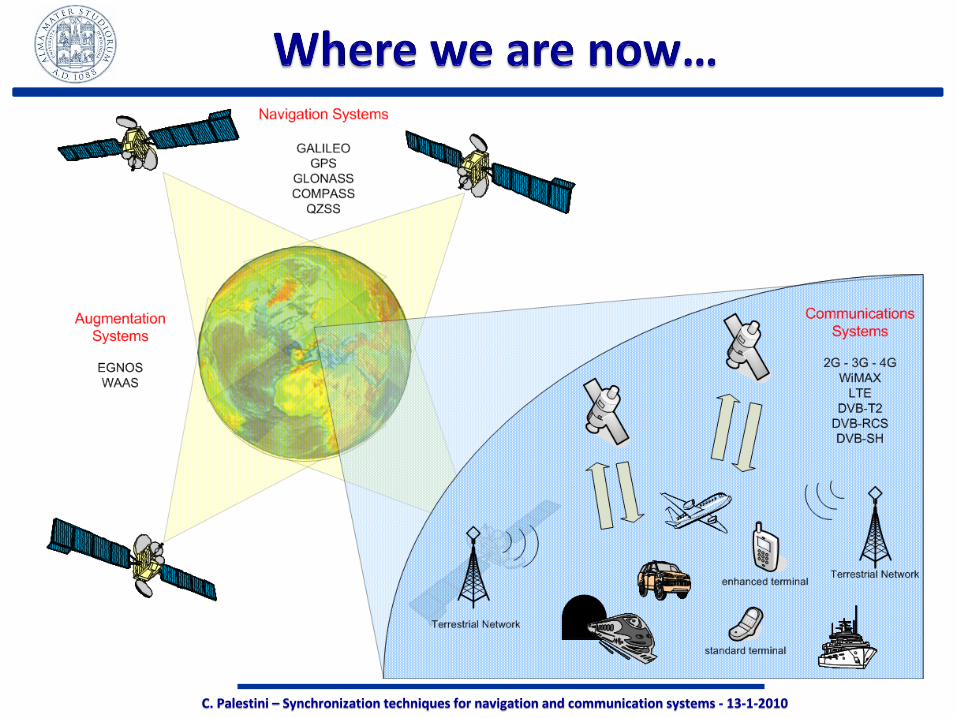
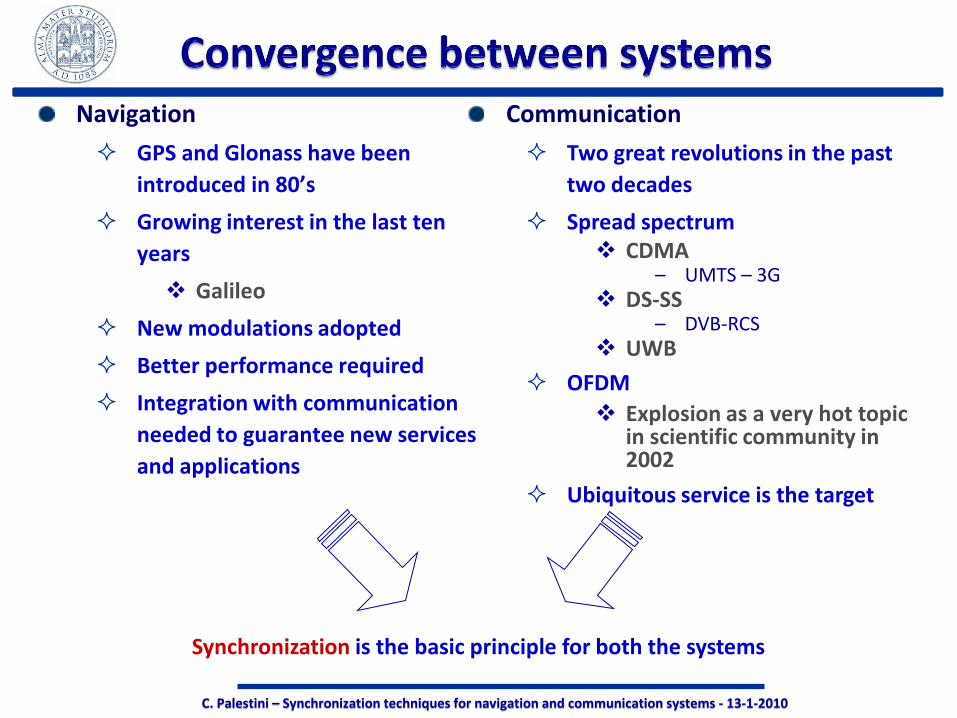
Navigation
GPS and Glonass have been
introduced in 80’s
Growing interest in the last ten
years
Galileo
New modulations adopted
Better performance required
Integration with communication
needed to guarantee new services
and applications
Communication
Two great revolutions in the past
two decades
Spread spectrum CDMA
– UMTS – 3G DS-SS
– DVB-RCS UWB
OFDM
Explosion as a very hot topic in scientific community in 2002
Ubiquitous service is the target
Synchronization is the basic principle for both the systems
C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010
C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010

C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010
Galileo is the European global navigation satellite system
Highly accurate, guaranteed global positioning service under civilian control
Interoperable with GPS and GLONASS (frequency bands, waveforms)
Constellation: 30 satellites (27 operational + 3 active spares), positioned in
three circular Medium Earth Orbit (MEO) planes at 23 222 km altitude above
the Earth
High system reliability is of primary importance
Especially for operation in critical environments, like for
air navigation and SoL services
C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010
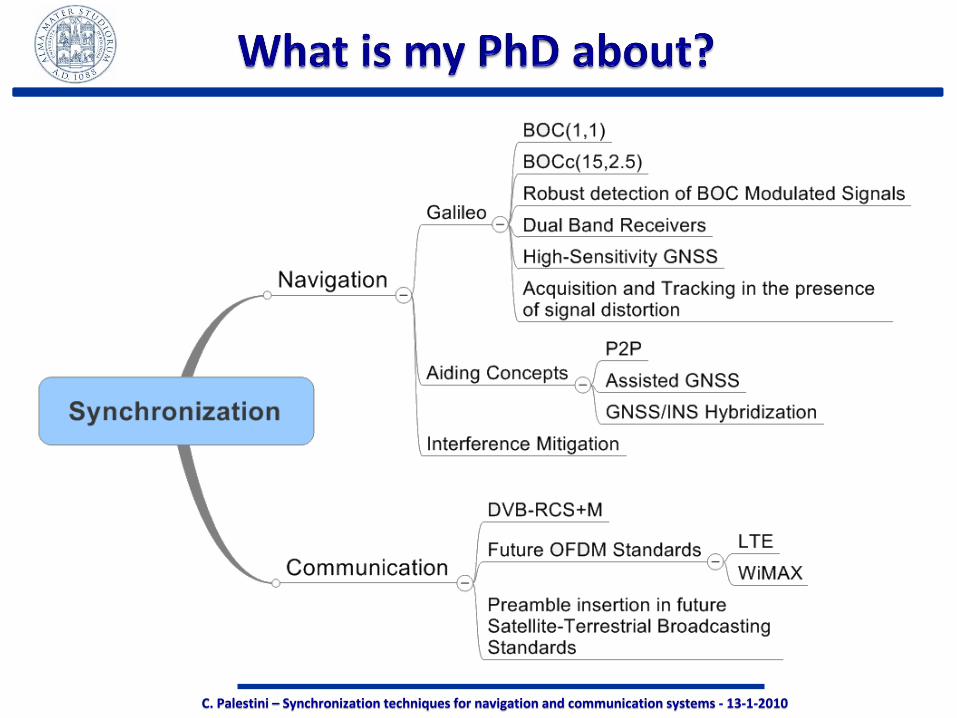
Binary Offset Carrier (BOC) Modulation
Acquisition
is in charge of exploring the entire code epoch domain (uncertainty region) in order to get a first rough estimate
Tracking
is asked to eventually detect erroneous synchronization events and to refine the estimate to a higher precision
Low complexity receivers Limiting complexity with no performance loss
Professional receivers Extracting information from different signals in different bands
Multipath
Signal distortion
Interference
Aiding Concepts
Assisted GNSS
GNSS/INS Hybridization
P2P Positioning
C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010
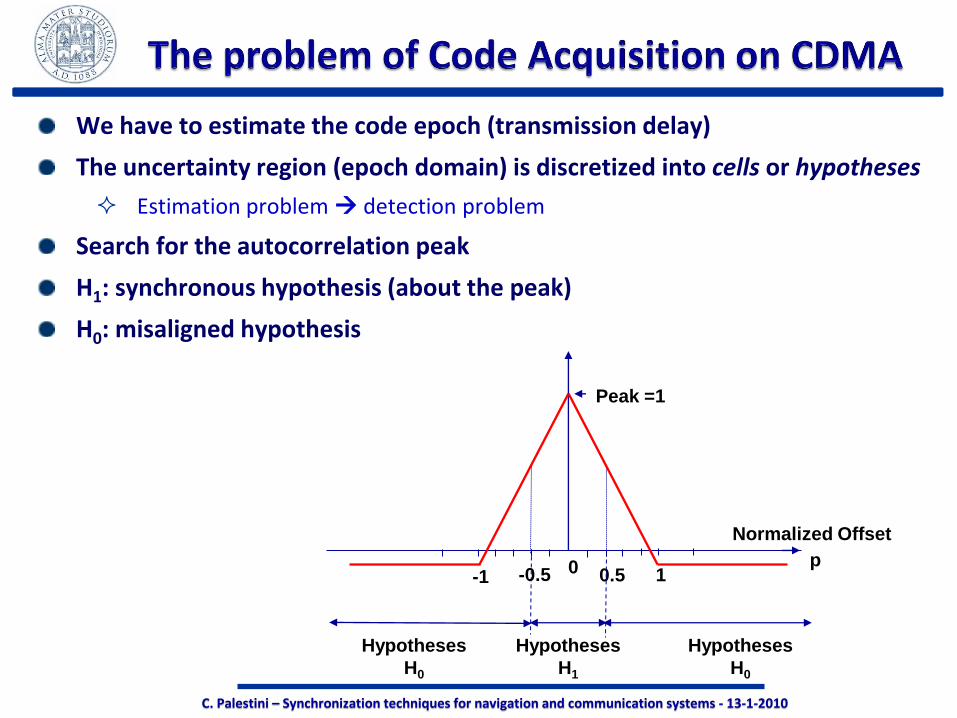
We have to estimate the code epoch (transmission delay)
The uncertainty region (epoch domain) is discretized into cells or hypotheses
Estimation problem detection problem
Search for the autocorrelation peak
H1: synchronous hypothesis (about the peak)
H0: misaligned hypothesis
0 1-1
Peak =1
Normalized Offset
p
Hypotheses
H1
Hypotheses
H0
Hypotheses
H0
0.5-0.5
C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010
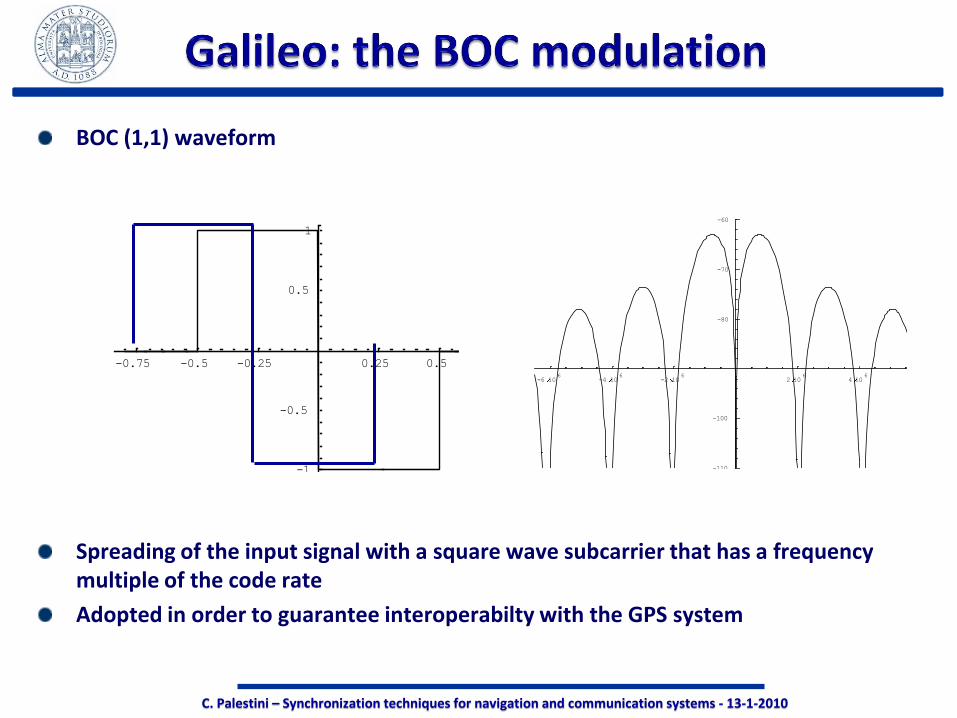
BOC (1,1) waveform
Spreading of the input signal with a square wave subcarrier that has a frequency multiple of the code rate
Adopted in order to guarantee interoperabilty with the GPS system
-6 106
-4 106
-2 106
2 106
4 106
6 106
-110
-100
-80
-70
-60
-0.75 -0.5 -0.25 0.25 0.5 0.75
-1
-0.5
0.5
1
C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010
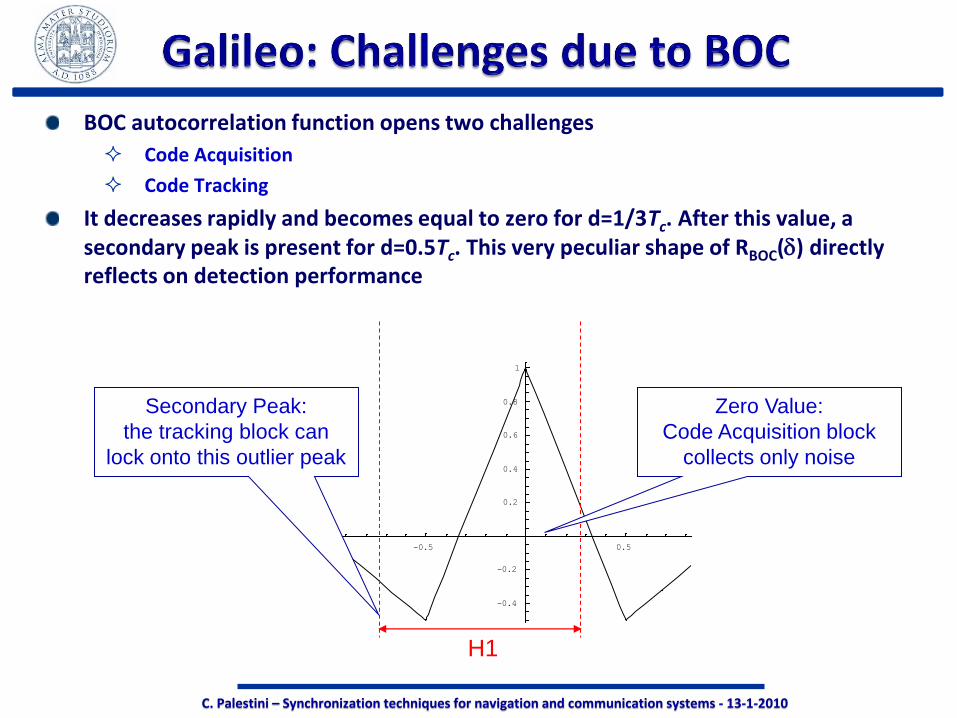
BOC autocorrelation function opens two challenges
Code Acquisition
Code Tracking
It decreases rapidly and becomes equal to zero for d=1/3Tc. After this value, a secondary peak is present for d=0.5Tc. This very peculiar shape of RBOC(d) directly reflects on detection performance
-1 -0.5 0.5 1
-0.4
-0.2
0.2
0.4
0.6
0.8
1
H1
Secondary Peak:
the tracking block can
lock onto this outlier peak
Zero Value:
Code Acquisition block
collects only noise
C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010
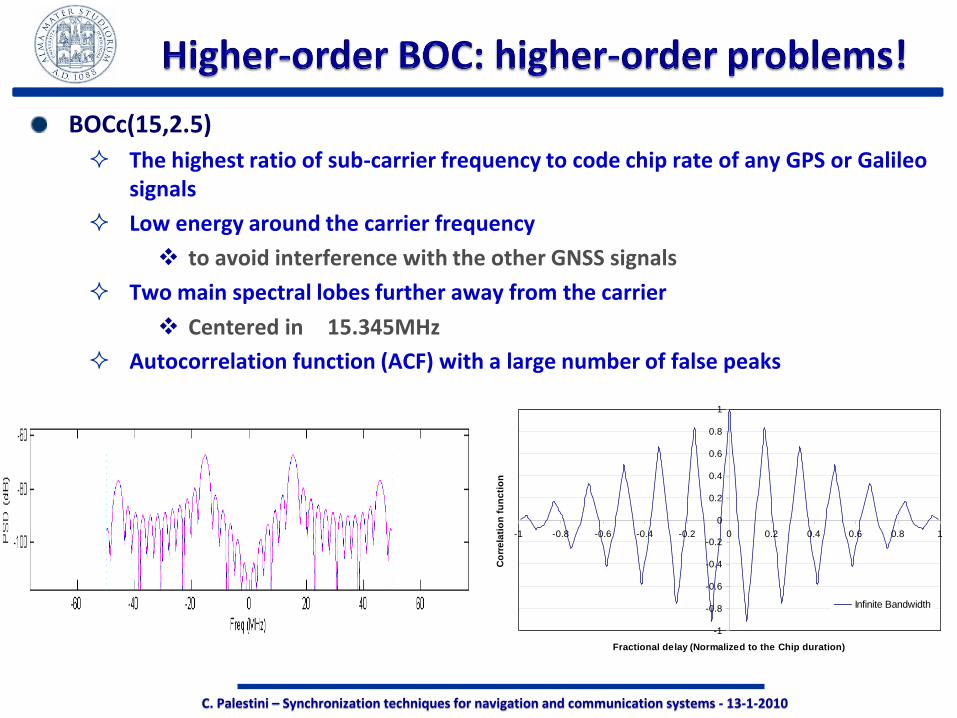
BOCc(15,2.5)
The highest ratio of sub-carrier frequency to code chip rate of any GPS or Galileo signals
Low energy around the carrier frequency
to avoid interference with the other GNSS signals
Two main spectral lobes further away from the carrier
Centered in 15.345MHz
Autocorrelation function (ACF) with a large number of false peaks
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
Fractional delay (Normalized to the Chip duration)
Co
rre
lati
on
fu
nc
tio
n
Infinite Bandwidth
C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010
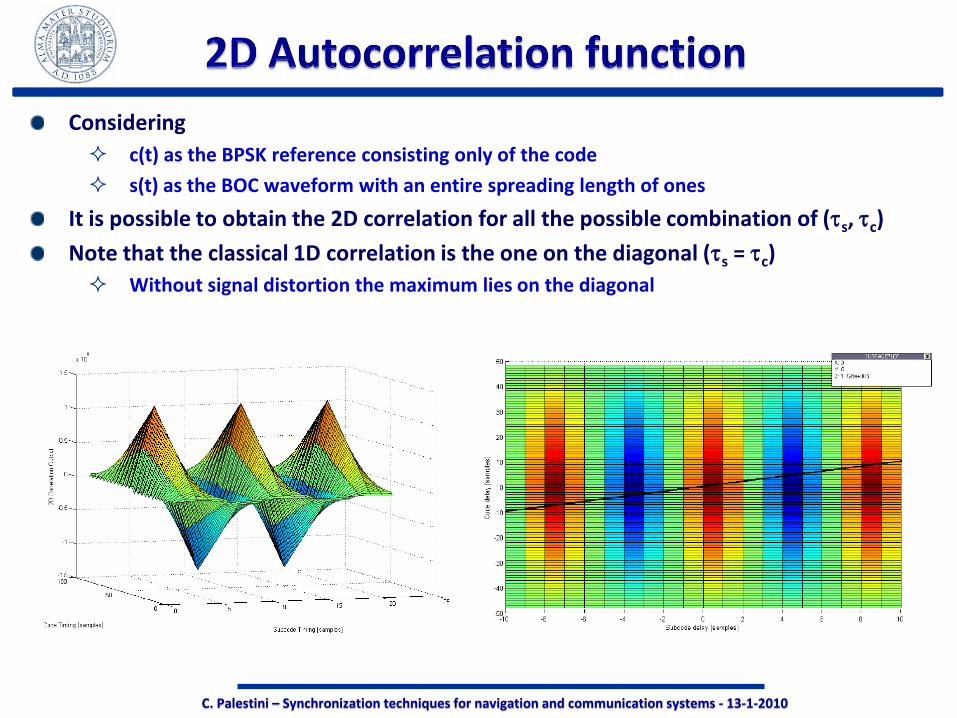
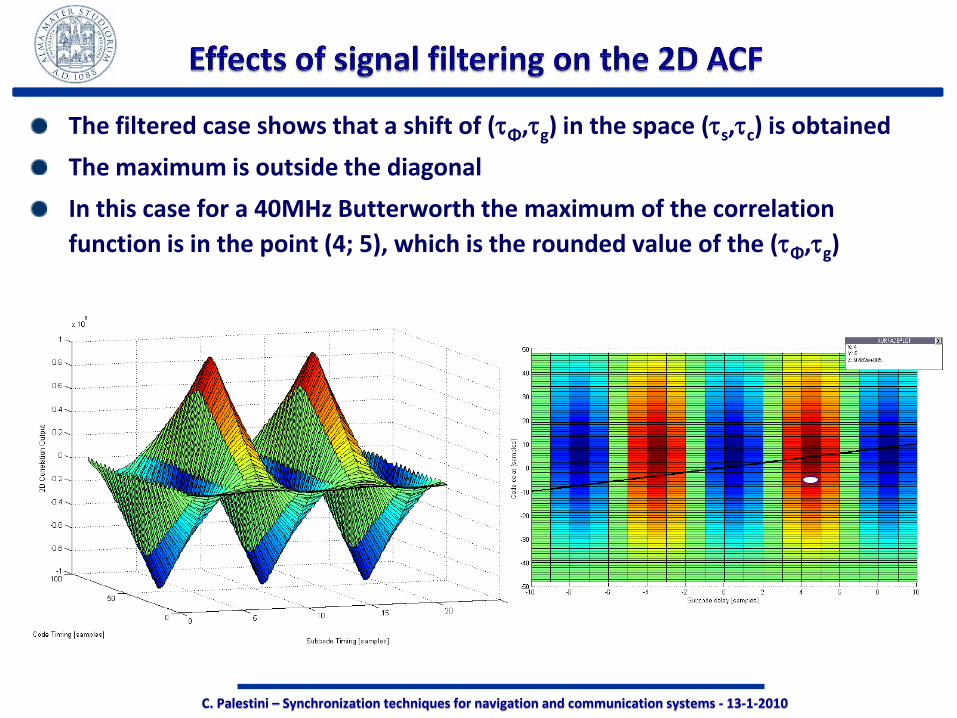
Considering
c(t) as the BPSK reference consisting only of the code
s(t) as the BOC waveform with an entire spreading length of ones
It is possible to obtain the 2D correlation for all the possible combination of (ts, tc)
Note that the classical 1D correlation is the one on the diagonal (ts = tc)
Without signal distortion the maximum lies on the diagonal

C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010
In the following a Butterworth 6-taps filter with 40MHz bandwidth is considered as an example
Since it is a non-linear
filter: group delay and
phase delay are different
C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010
The filtered case shows that a shift of (tΦ,tg) in the space (ts,tc) is obtained
The maximum is outside the diagonal
In this case for a 40MHz Butterworth the maximum of the correlation
function is in the point (4; 5), which is the rounded value of the (tΦ,tg)
C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
Fractional delay (Normalized to the Chip duration)
Co
rre
lati
on
fu
nc
tio
n
Infinite Bandwidth
Bw = 120MHz
Bw = 80MHz
Bw = 40MHz
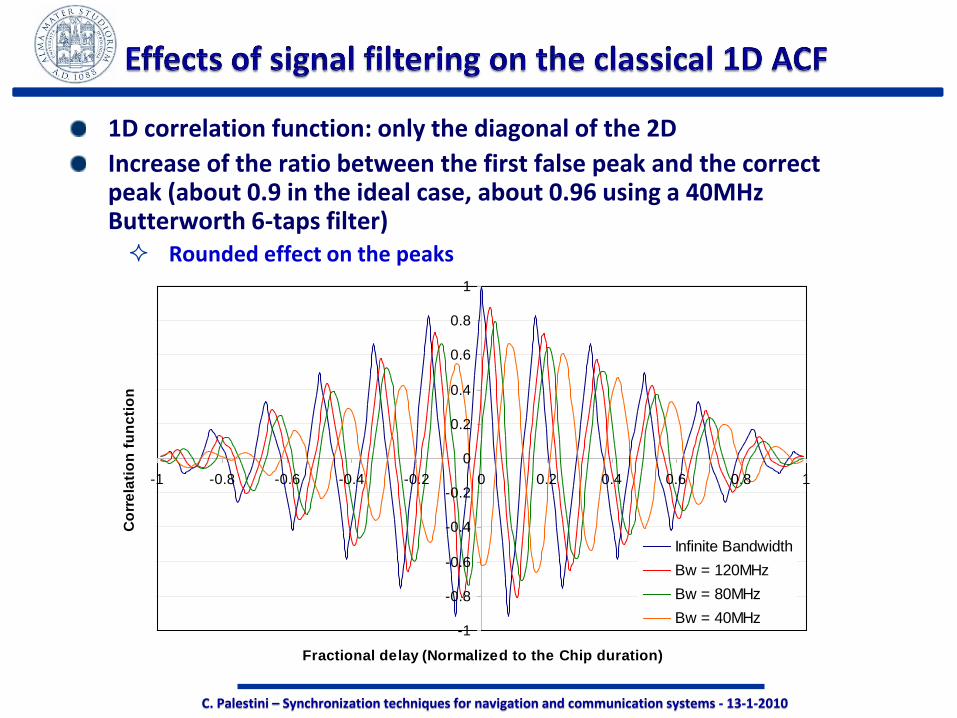
1D correlation function: only the diagonal of the 2D
Increase of the ratio between the first false peak and the correct peak (about 0.9 in the ideal case, about 0.96 using a 40MHz Butterworth 6-taps filter) Rounded effect on the peaks
C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010
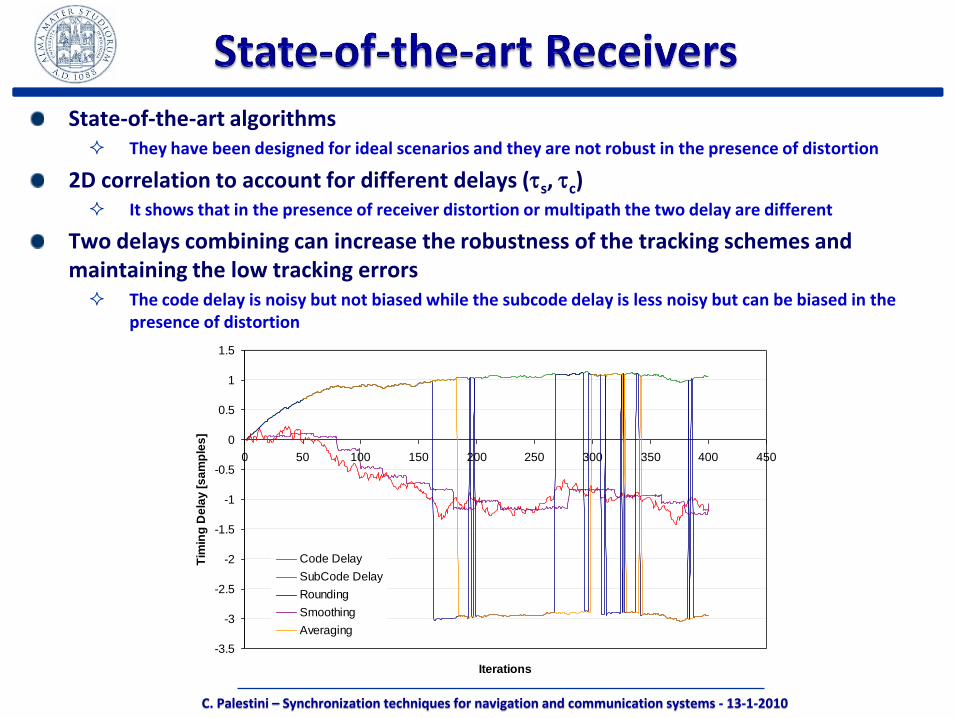
State-of-the-art algorithms They have been designed for ideal scenarios and they are not robust in the presence of distortion
2D correlation to account for different delays (ts, tc) It shows that in the presence of receiver distortion or multipath the two delay are different
Two delays combining can increase the robustness of the tracking schemes and maintaining the low tracking errors The code delay is noisy but not biased while the subcode delay is less noisy but can be biased in the
presence of distortion
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
0 50 100 150 200 250 300 350 400 450
Iterations
Tim
ing
De
lay
[s
am
ple
s]
Code Delay
SubCode Delay
Rounding
Smoothing
Averaging
C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010
Pre-FFT synch The estimation algorithms operate in the time domain
Coarse Timing Estimation (CTE)
Fractional Frequency Estimation (FFE)
The Pre-FFT algorithms are usually Guard Interval (GI) based
they exploit the correlation between the useful symbol part and the cyclic
prefix of the received signal
Post-FFT synch The estimation algorithms operate in the frequency domain
Integer Frequency Estimation (IFE)
Fine Timing Estimation (FTE).
The Post-FFT algorithms are usually based on a data aided estimation on the
pilot tones
Frame acquisition which consists in the detection of the Start of Frame (SoF)
C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010
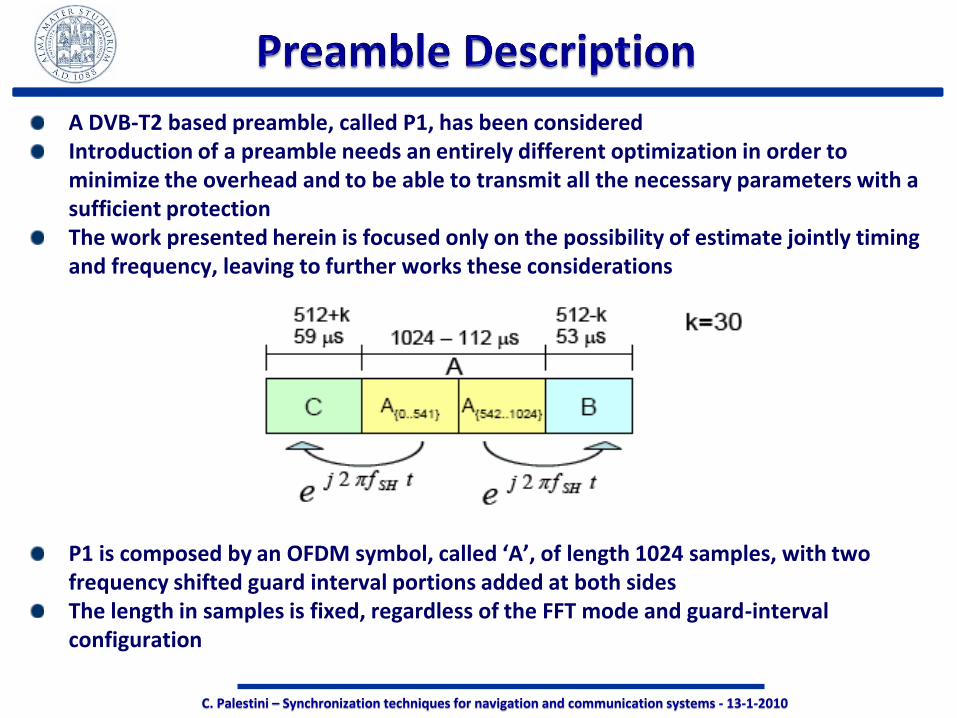
A DVB-T2 based preamble, called P1, has been consideredIntroduction of a preamble needs an entirely different optimization in order to minimize the overhead and to be able to transmit all the necessary parameters with a sufficient protectionThe work presented herein is focused only on the possibility of estimate jointly timing and frequency, leaving to further works these considerations
P1 is composed by an OFDM symbol, called ‘A’, of length 1024 samples, with two frequency shifted guard interval portions added at both sidesThe length in samples is fixed, regardless of the FFT mode and guard-interval configuration
C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010
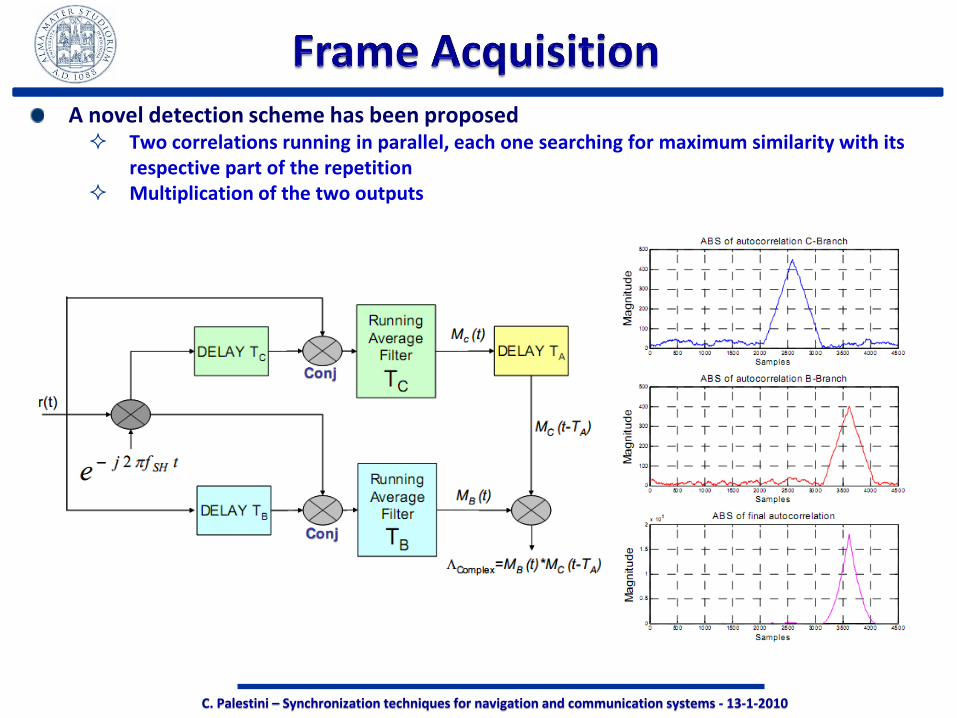
A novel detection scheme has been proposed Two correlations running in parallel, each one searching for maximum similarity with its
respective part of the repetition Multiplication of the two outputs
C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010
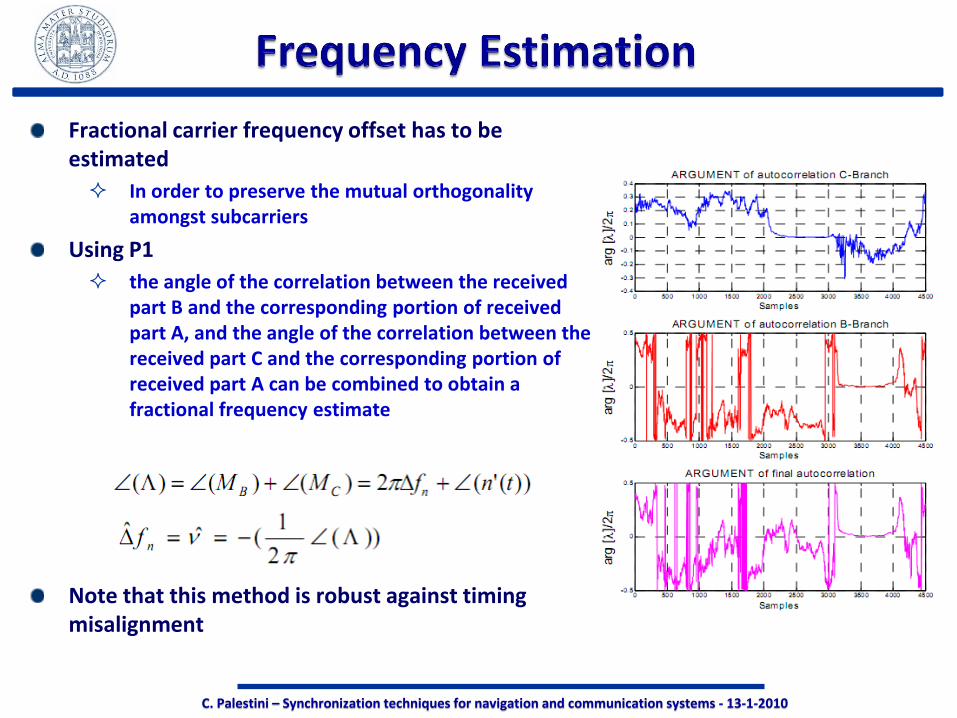
Fractional carrier frequency offset has to be estimated
In order to preserve the mutual orthogonality amongst subcarriers
Using P1
the angle of the correlation between the received part B and the corresponding portion of received part A, and the angle of the correlation between the received part C and the corresponding portion of received part A can be combined to obtain a fractional frequency estimate
Note that this method is robust against timing misalignment
C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010
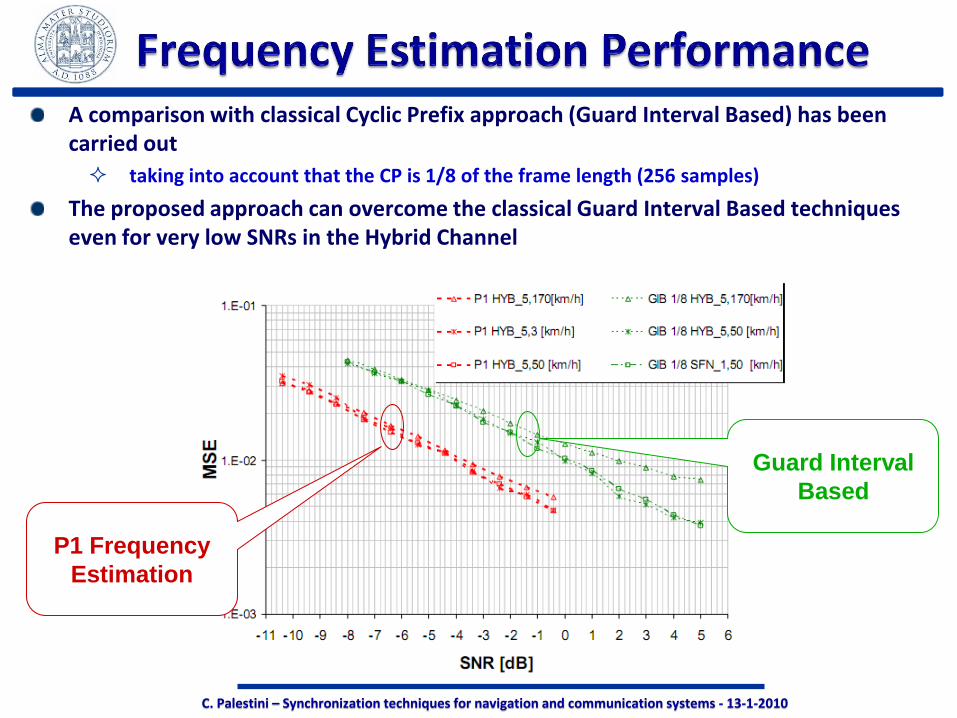
A comparison with classical Cyclic Prefix approach (Guard Interval Based) has been carried out
taking into account that the CP is 1/8 of the frame length (256 samples)
The proposed approach can overcome the classical Guard Interval Based techniques even for very low SNRs in the Hybrid Channel
P1 Frequency
Estimation
Guard Interval
Based
C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010
New acquisition strategies for BOC modulation
Quadribranch detector
Staggered Time and Frequency Search
2D Correlation for High-Order BOC Acquisition and Tracking in the presence of signal distortion
A novel concept of Aided GNSS
Ultra Tight
A synthetic correlation function in order to aid the tracking loops
A joint code acquisition interference mitigation approach for assisted GNSS
Analytical model
Results of acquisition for DVB-RCS+M inserted in Guidelines
Analysis of synchronization aspects in the most important OFDM standards
LTE
WiMAX
DVB-SH
A novel broadcasting paradigm: Single Frequency Satellite Networks

C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010
Foreign Fellowship European Space Research and Technology Center (ESTEC) - European Space Agency (ESA)
Division: RF Payloads Systems – Section: Radio Navigation
01/02/2009 – 31/07/2009
Topic: Acquisition and Tracking of Galileo E1-A in the Presence of Signal Distortion
European Reviewers Prof. Carlos Mosquera (University of Vigo)
Dr. Jose Angel Avila Rodriguez (University FAF Munich)
Journal articles:
*1+ C. Palestini, R. Pedone, M. Villanti, G.E. Corazza, “Integrated NAV-COM Systems: Assisted Code Acquisition and Interference Mitigation”, Systems Journal IEEE, Special Issue on “Recent Advances in Global Navigation and Communication Satellite Systems (GNCSS)”, vol.2, no.1, pp.48-61, March 2008.
[2] Pansoo Kim, A. Vanelli-Coralli, M. Villanti, R. Pedone, S. Cioni, M. Neri, C. Palestini, M. Papaleo, Ho-Jin Lee, G.E. Corazza, “Direct Sequence Spectrum Spreading Techniques for Next Generation Mobile Broadband Satellite Services", Wiley International Journal on Satellite Communications, special issue on DVB-RCS+M
[3] F. Bastia, C. Bersani, E.A. Candreva, S. Cioni, G.E. Corazza, M. Neri, C. Palestini, M. Papaleo, S. Rosati and A. Vanelli-Coralli, “LTE Air Interface over Broadband Satellite Networks", Eurasip Journal on Wireless Communications and Networking

C. Palestini – Synchronization techniques for navigation and communication systems - 13-1-2010
Conferences articles:
*4+ G.E. Corazza, C. Palestini, R. Pedone, M. Villanti, “Soft Combining for Improved Sensitivity GNSS Code Acquisition”, Proceedings of Navitec 2006, 11-13 December 2006, ESTEC, Noordwijk, The Netherlands
*5+ G.E. Corazza, C. Palestini, R. Pedone, and M. Villanti, “Robust detectors for code acquisition with BOC modulation for GNSSreceivers”, Proceedings of International Workshop on Satellite and Space Communications 2007 (IWSSC2007), September 12-14, 2007, Salzburg, Austria, pp.299-303
*6+ M. Villanti, C. Palestini, R. Pedone, and G.E. Corazza, “Robust Code Acquisition in the Presence of BOC Modulation for Future Galileo Receivers”, IEEE International Conference on Communications, 24-28 June 2007, Glasgow, Scotland
*7+ C. Palestini, R. Pedone, M. Villanti, and G.E. Corazza, “Code Acquisition with Interference Mitigation for Galileo Receivers”, ION GNSS 2007, 25-28 September 2007, Fort Worth, Texas
*8+ G.E. Corazza, C. Palestini, R. Pedone, and M. Villanti, “Galileo Primary Code Acquisition Based on Multi-hypothesis Secondary Code Ambiguity Elimination”, ION GNSS 2007, 25-28 September 2007, Fort Worth, Texas
[9] A. Vanelli-Coralli, G.E. Corazza, C. Palestini, R. Pedone, M. Villanti, H.J. Lee, P.S. Kim, “Code Acquisition for Next Generation Mobile Broadband Satellite Services”, Proceedings of International Conference on Communications ICC 2008, 19-23 May 2008, Beijing, pages: 1871-1875
*10+ F. Bastia, C. Palestini, R. Pedone, M. Villanti, G.E. Corazza, “Staggered Time and Frequency Search to Aid Frame Synchronization”, Proceedings of International Symposium on Spread Spectrum Techniques and Applications 2008 (ISSSTA 2008), August 2008, Bologna
*11+ C. Palestini, F. Bastia, G.E. Corazza, A. Vanelli Coralli, M. Villanti, R. Pedone, “Time and Frequency Staggered Search for BOC Modulated Ranging Signals”, NAVITEC 2008, December 2008, Noordwijk, The Netherlands
*12+ F. Bastia, C. Palestini, S. Rosati, M. Neri, G.E. Corazza, “Preamble Insertion in Future Satellite-Terrestrial OFDM MobileBroadcasting Standards”, International Communications Satellite Systems Conference (ICSSC) 2009, June 2009, Edimburgh, Scotland
*13+ G.E. Corazza, C. Bersani, C. Palestini, A. Vanelli Coralli, “Single Frequency Satellite Networks: a Novel Approach for Multi-Spot Broadcasting”, International Communications Satellite Systems Conference (ICSSC) 2009, June 2009, Edimburgh, Scotland
*14+ G.E. Corazza, C. Palestini, E.A. Candreva, A. Vanelli Coralli, “The Single Frequency Satellite Network Concept: Multiple Beams for Unified Coverage”, Globecom 2009, December 2009, Honolulu
*15+ F. Bastia, L. Deambrogio, C. Palestini, M. Villanti, R. Pedone, and G.E. Corazza, “Hierarchical Code Acquisition for Dual Band GNSS Receivers”, to be presented in IEEE PLANS 2010
*16+ C. Palestini, L. Deambrogio, F. Bastia, and G.E. Corazza, “An Insider View on The Tracking Loops: a Novel Ultra-Tight GNSS/INS Hybridization Approach”, to be presented in IEEE PLANS 2010