01/02/2016 Marco Donà Finite Element Modelling with Plastic Hinges 1 Plastic hinge approach A plastic hinge represents a concentrated post-yield behaviour in one or more degrees of freedom. Hinges only affect the behaviour of the structure in nonlinear static and nonlinear direct-integration time-history analyses. Yielding and post-yielding behaviour can be modelled using discrete automatic or user-defined hinges at any location along that element. Plastic Hinges can only be introduced into frame elements (not into cables or Tendons). 2 Hinge Properties A hinge property is a named set of rigid-plastic properties that can be assigned to one or more Frame elements. You may de fine as many hinge properties as you need. For each force degree of freedom (axial and shears), you may specify the plastic force-displacement behaviour. For each moment degree of freedom (bending and torsion) you may specify the plastic moment-rotation behaviour. Each hinge property may have plastic properties specified for any number of the six degrees of freedom. The axial force and the two bending moments may be coupled through an interaction surface. Degrees of freedom that are not specified remain elastic. There are multiple possibilities to model the plastic hinge when this concept is used in structural analysis. Uncoupled moment, torsion, axial force and shear hinges are available. There is also a coupled P-M2-M3 hinge which yields based on the interaction of axial force and bi-axial bending moments at the hinge location. Subsets of this hinge include P-M2, P-M3, and M2-M3 behaviour (see Figure 1). Figure 1: Hinge Property Data More than one type of hinge can exist at the same location, for example, you might assign both an M3 (moment) and a V2 (shear) hinge to the same end of a frame element. Hinge properties can be computed automatically from the element material and section properties according to ASCE-41 criteria. Automatic hinge properties for steel members are based on Tables 9-6 of ASCE-41, and for concrete members, Tables 10-7 and 10-10 ASCE-41 [1]. Similar curve can be also obtained using Eurocode 8 part 3 (see Table 1). Figure 2 shows the generalized load-deformation curve with parameters a, b, and c as defined in Tables 9-6 and 9-7 (ASCE-41).
Transcript
01/02/2016
Marco Donà
Finite Element Modelling with Plastic Hinges
1 Plastic hinge approach
A plastic hinge represents a concentrated post-yield behaviour in one or more degrees of freedom. Hinges only
affect the behaviour of the structure in nonlinear static and nonlinear direct-integration time-history analyses.
Yielding and post-yielding behaviour can be modelled using discrete automatic or user-defined hinges at any
location along that element. Plastic Hinges can only be introduced into frame elements (not into cables or
Tendons).
2 Hinge Properties
A hinge property is a named set of rigid-plastic properties that can be assigned to one or more Frame elements.
You may de fine as many hinge properties as you need.
For each force degree of freedom (axial and shears), you may specify the plastic force-displacement behaviour.
For each moment degree of freedom (bending and torsion) you may specify the plastic moment-rotation
behaviour. Each hinge property may have plastic properties specified for any number of the six degrees of
freedom. The axial force and the two bending moments may be coupled through an interaction surface. Degrees
of freedom that are not specified remain elastic.
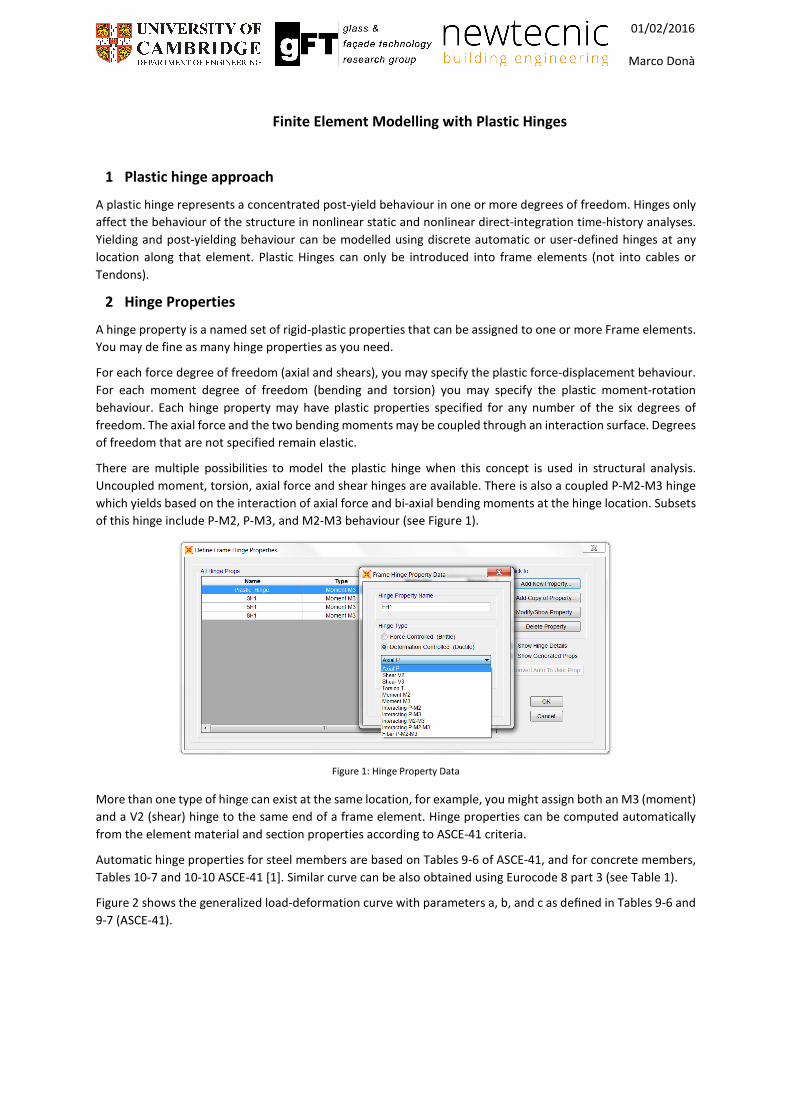
There are multiple possibilities to model the plastic hinge when this concept is used in structural analysis.
Uncoupled moment, torsion, axial force and shear hinges are available. There is also a coupled P-M2-M3 hinge
which yields based on the interaction of axial force and bi-axial bending moments at the hinge location. Subsets
of this hinge include P-M2, P-M3, and M2-M3 behaviour (see Figure 1).
Figure 1: Hinge Property Data
More than one type of hinge can exist at the same location, for example, you might assign both an M3 (moment)
and a V2 (shear) hinge to the same end of a frame element. Hinge properties can be computed automatically
from the element material and section properties according to ASCE-41 criteria.
Automatic hinge properties for steel members are based on Tables 9-6 of ASCE-41, and for concrete members,
Tables 10-7 and 10-10 ASCE-41 [1]. Similar curve can be also obtained using Eurocode 8 part 3 (see Table 1).
Figure 2 shows the generalized load-deformation curve with parameters a, b, and c as defined in Tables 9-6 and
9-7 (ASCE-41).
2
Figure 2: Generalised Force-Deformation relationship used for the plastic hinges according to ASCE-41.
Table 1: Plastic rotation capacity at the end beams or columns with dimensionless axial load v not greater than 0.30 [Eurcode 8 part 3].
2.1 Plastic Deformation Curve
For each degree of freedom (DoF), you define a force-displacement (moment-rotation) curve that gives the yield
value and the plastic deformation following yield. This is done in terms of a curve with values at five points, A-
B-C-D-E, as shown in Figure 2. You may specify a symmetric curve, or one that differs in the positive and negative
direction.
The following points should be noted:
• Point A is always the origin.
• Point B represents yielding. No deformation occurs in the hinge up to point B, regardless of the
deformation value specified for point B. The displacement (rotation) at point B will be subtracted from
the deformations at points C, D, and E. Only the plastic deformation beyond point B will be exhibited
by the hinge.
• Point C represents the ultimate capacity for push-over analysis. However, you may specify a positive
slope from C to D for other purposes.
• Point D represents a residual strength for push over analysis. However, you may specify a positive slope
from C to D or D to E for other purposes.
• Point E represent total failure. Beyond point E the hinge will drop load down to point F (not shown)
directly below point E on the horizontal axis. If you do not want your hinge to fail this way, be sure to
specify a large value for the de formation at point E.
You may specify additional deformation measures at points IO (immediate occupancy), LS (life safety), and CP
(collapse prevention), see Figure 3. Their values are available in ASCE-41 Table 9-4; Table 9-6; and they are
informational measures that are reported in the analysis results and used for performance-based design. They
do not have any effect on the behaviour of the structure.
Prior to reaching point B, all de formation is linear and occurs in the Frame element itself, not the hinge. Plastic
deformation beyond point B occurs in the hinge in addition to any elastic deformation that may occur in the
element. When the hinge unloads elastically, it does so without any plastic deformation, i.e., parallel to slope A-
B.
3
Figure 3: The A-B-C-D-E curve for Force/Moment vs. Displacement/Rotation.
3 Hinge Definition
3.1 M3 Hinge
For the automatic FEMA frame hinges, the yield rotation ��is specified in the code (ASCE 41-06), Table 5-6 as
the chord rotation of the full member length due to plastic moment at one end. Specifically, the yield rotation
is defined as:
Beams: �� =���
�; Columns: �� =
���
�(1 −
�
��),
where �� = ����, �is the frame object (not element) length and ��� is the expected yield stress1.
Figure 4: Definition of Chord Rotation
If the beam element with plastic hinge does not span between two columns, or for a column between two floors,
but it is only a portion of it, the yield rotation has to be entered manually using � equal the span/length of the
beam/column.
1 The expected yield (���) stress is the product of a code-prescribed factor and the expected strength of the material. This factor is typically
around 1.1, as with ASCE-41 Table 9-3. These effective stress values represent the material response which occurs approximately halfway
along the x-axis of the force-deformation relationship. ASCE-41 recommends using effective strength for deformation-controlled actions.
Minimum strength represents the lower bound of nonlinear material response, which is best for force-controlled actions. Expected stress
values are used to automatically generate hinge properties for P-M2-M3 and P-M hinges [2].
If Eurocodes are used, ���may be taken equal to the nominal value �� multiplied by the over strength factor ��� for the steel of the beam,
determined in accordance with EN 1998-1: 2004 [Eurocode 8 part 3].
4
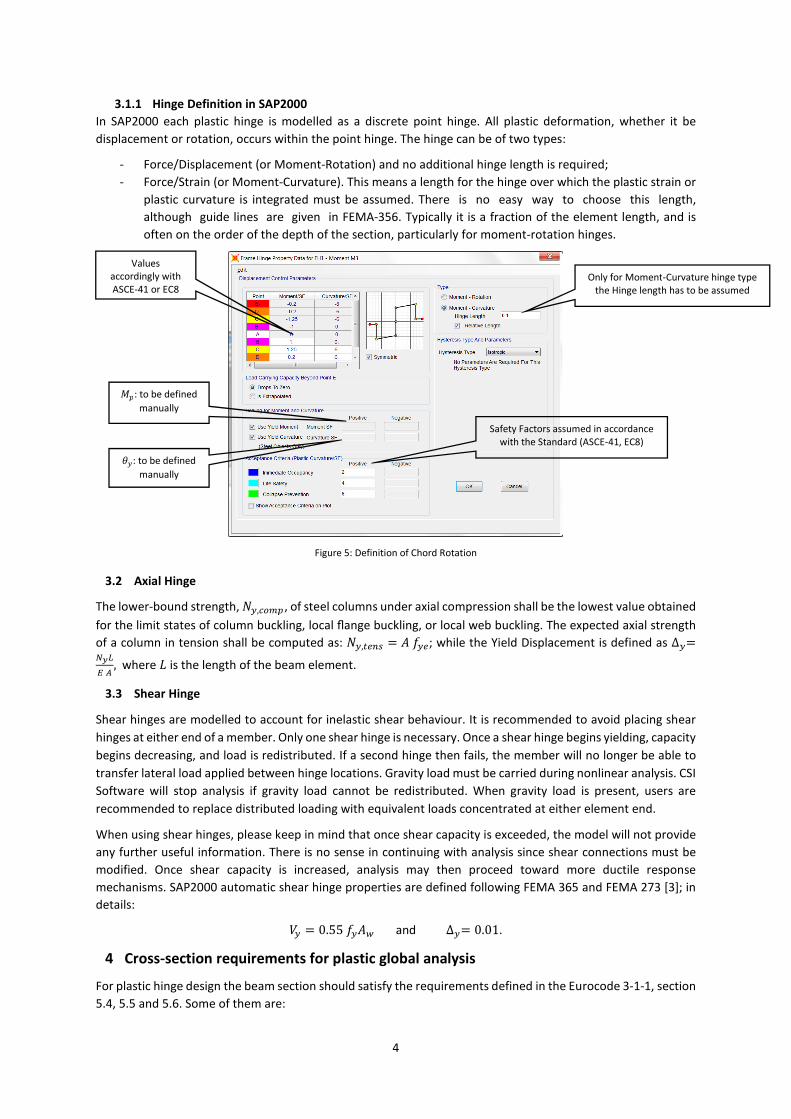
3.1.1 Hinge Definition in SAP2000
In SAP2000 each plastic hinge is modelled as a discrete point hinge. All plastic deformation, whether it be
displacement or rotation, occurs within the point hinge. The hinge can be of two types:
- Force/Displacement (or Moment-Rotation) and no additional hinge length is required;
- Force/Strain (or Moment-Curvature). This means a length for the hinge over which the plastic strain or
plastic curvature is integrated must be assumed. There is no easy way to choose this length,
although guide lines are given in FEMA-356. Typically it is a fraction of the element length, and is
often on the order of the depth of the section, particularly for moment-rotation hinges.
Figure 5: Definition of Chord Rotation
3.2 Axial Hinge
The lower-bound strength, ��,���� , of steel columns under axial compression shall be the lowest value obtained
for the limit states of column buckling, local flange buckling, or local web buckling. The expected axial strength
of a column in tension shall be computed as: ��,��� = !���; while the Yield Displacement is defined as ∆�=#��
$,where � is the length of the beam element.
3.3 Shear Hinge
Shear hinges are modelled to account for inelastic shear behaviour. It is recommended to avoid placing shear
hinges at either end of a member. Only one shear hinge is necessary. Once a shear hinge begins yielding, capacity
begins decreasing, and load is redistributed. If a second hinge then fails, the member will no longer be able to
transfer lateral load applied between hinge locations. Gravity load must be carried during nonlinear analysis. CSI
Software will stop analysis if gravity load cannot be redistributed. When gravity load is present, users are
recommended to replace distributed loading with equivalent loads concentrated at either element end.
When using shear hinges, please keep in mind that once shear capacity is exceeded, the model will not provide
any further useful information. There is no sense in continuing with analysis since shear connections must be
modified. Once shear capacity is increased, analysis may then proceed toward more ductile response
mechanisms. SAP2000 automatic shear hinge properties are defined following FEMA 365 and FEMA 273 [3]; in
details:
%� = 0.55��!) and ∆�= 0.01.
4 Cross-section requirements for plastic global analysis
For plastic hinge design the beam section should satisfy the requirements defined in the Eurocode 3-1-1, section
5.4, 5.5 and 5.6. Some of them are:
Only for Moment-Curvature hinge type
the Hinge length has to be assumed
��: to be defined
manually
��: to be defined
manually
Values
accordingly with
ASCE-41 or EC8
Safety Factors assumed in accordance
with the Standard (ASCE-41, EC8)
5
- At plastic hinge locations, the cross-section of the member which contains the plastic hinge should have
a rotation capacity of not less than the required at the plastic hinge location.
- In a uniform member sufficient rotation capacity may be assumed at a plastic hinge if both the following
requirements are satisfied:
a) the member has Class 1 cross-sections at the plastic hinge location;
b) where a transverse force that exceeds 10 % of the shear resistance of the cross section, is applied to
the web at the plastic hinge location, web stiffeners should be provided within a distance along the
member of h/2 from the plastic hinge location, where h is the height of the cross section.
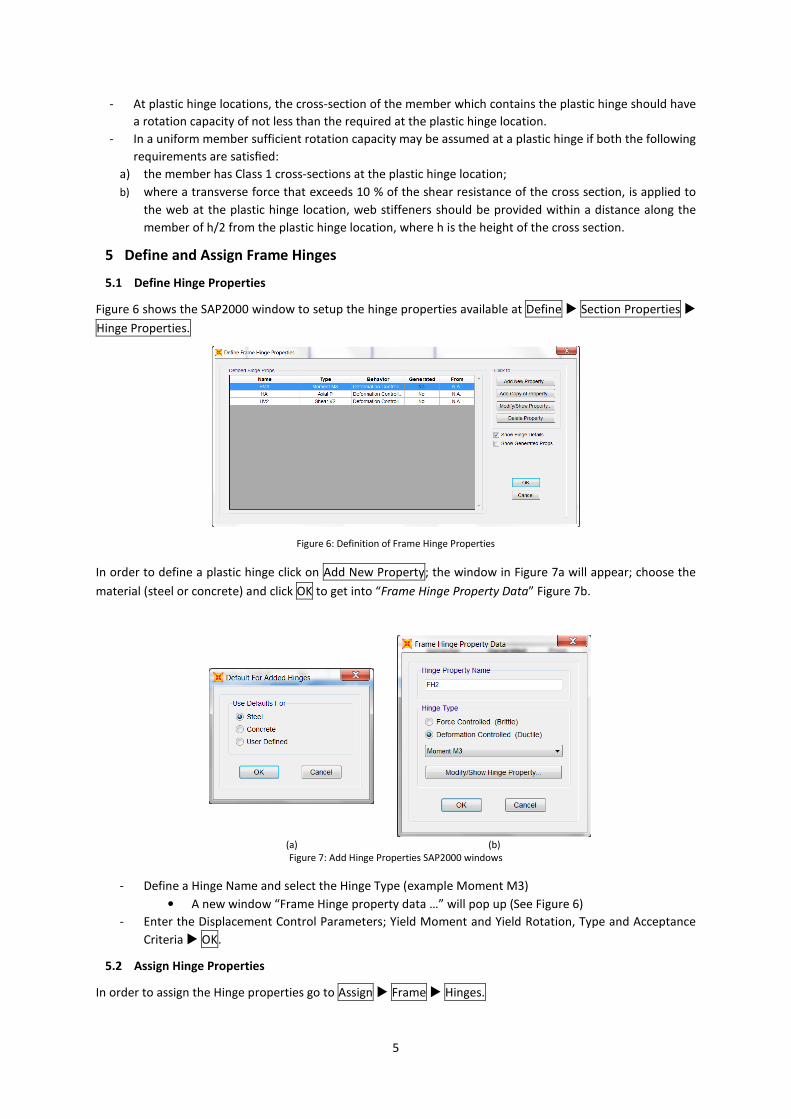
5 Define and Assign Frame Hinges
5.1 Define Hinge Properties
Figure 6 shows the SAP2000 window to setup the hinge properties available at Define � Section Properties �
Hinge Properties.
Figure 6: Definition of Frame Hinge Properties
In order to define a plastic hinge click on Add New Property; the window in Figure 7a will appear; choose the
material (steel or concrete) and click OK to get into “Frame Hinge Property Data” Figure 7b.
(a) (b)
Figure 7: Add Hinge Properties SAP2000 windows
- Define a Hinge Name and select the Hinge Type (example Moment M3)
• A new window “Frame Hinge property data …” will pop up (See Figure 6)
- Enter the Displacement Control Parameters; Yield Moment and Yield Rotation, Type and Acceptance
Criteria � OK.
5.2 Assign Hinge Properties
In order to assign the Hinge properties go to Assign � Frame � Hinges.
6
In the window “Assign Frame Hinges” of Figure 8, select the Hinge Property previously created and introduce
the Relative Distance value, which will locate the hinge along the beam � Add Hinge. Multiple Hinges can be
added into the same beam.
Figure 8: Assign Frame Hinges
- Then select the beam elements where you are planning to introduce the Hinges � OK to complete the
hinge assignment.
5.3 Recommendation
Sudden strength loss is often unrealistic and can be very difficult to analyse. It is encouraged to consider strength
loss only when strictly necessary, to use realistic negative slopes instead, and to carefully evaluate the results.
6 Run Nonlinear Analysis
Time-history analysis may be initiated using the process which follows:
- Create the model and assign support conditions to restrained joints.
- Select Define � Functions � Time History to define a time-history function which characterizes load
variation over time.
- Assign load conditions to the model through Assign � Joint Loads or Frame Loads.
- Define either a modal or direct-integration time-history load case through Define � Load Cases.
More details are available in the report “Fast Nonlinear Analysis_20160118_MD”
7 Analysis Results
For each output step in a nonlinear static or nonlinear direct-integration time-history Load Case, you may
request analysis results for the hinges. These results include:
The forces and/or moments carried by the hinge. Degrees of freedom not defined for the hinge will report zero
values, even though non-zero values are carried rigidly through the hinge.
The plastic displacements and/or rotations.
The most extreme state experienced by the hinge in any degree of freedom. This state does not indicate whether
it occurred for positive or negative deformation: A-B; B-C; C-D; D-E; >E
The most extreme performance status experienced by the hinge in any degree of freedom. This status does not
indicate whether it occurred for positive or negative deformation.
7
When you display the deflected shape in the graphical user interface for a nonlinear static or nonlinear direct-
integration time-history Load Case, the hinges are plotted as coloured dots indicating their most extreme state
or status. The colours used for the different states are indicated on the plot. Hinges that have not experienced
any plastic deformation (A to B) are not shown.
These outputs are available under: Display
In particular the plastic Hinges Moment-Rotation diagram can be seen in: Display � Show Hinge Results (Figure
9).
Figure 9: Hinge Results
8 Difference between hinge and hysteretic-link application
The energy dissipation which occurs during time-history analysis may be modelled using hysteretic links. Links
are useful for capturing dynamic loading and unloading because of their multi-axial response.
Isotropic, kinematic, Takeda, and pivot hysteresis models are available for single DOF hinges. For isotropic
hysteresis, hinges unload elastically, parallel to the initial stiffness tangent (A-B slope); while for other hysteresis
types, unloading follows a more complex nonlinear relationship.
For links, several additional hysteretic models are available. Hysteretic behaviour may be specified for multiple
degrees-of-freedom using a single link.
PM and PMM hinges always use isotropic dissipation, which dissipates more energy than the kinematic, Takeda,
and Pivot rules available for the single DOF hinges.
8.1 Multilinear plastic Link to replace plastic Hinge
Hinge can be modelled as a separate link element. This method is currently only available in the ETABS Ultimate
level, and enables hinge behaviour to be considered in nonlinear model time-history (FNA) load cases. As a rule,