Page 1
1ARM University ProgramCopyright © ARM Ltd 2014
Teaching Embedded System Design and Optimization with the ARM Cortex-M0+ Microcontrollers
Dr. Alexander G. DeanDept. of ECE
North Carolina State UniversityRaleigh, NC
[email protected] ://www.cesr.ncsu.edu/agdean
Page 2
2ARM University ProgramCopyright © ARM Ltd 2014
Course Approach Hands-on MCU development experience Programming in C with free toolchain from Keil Simple, inexpensive hardware Easy system expansion with Arduino-compatible hardware
Relevant, useful material based on 13 years of experience Interaction with industry through on-site design reviews of real
embedded systems Teaching large (50 – 120 students) undergraduate and graduate
embedded system courses
Prerequisites Introductory course: introduction to computer organization, C
programming Advanced course: introductory course. Other courses also helpful
Page 3
3ARM University ProgramCopyright © ARM Ltd 2014
Course Materials Easy adoption for your own course Flexibility with modular design All source files provided (pptx, docx, vsd, c, h …)
Course modules typically include PowerPoint slides/lecture notes Demonstration code for use in lecture and outside of class Homework questions and solutions Lab exercise(s) with step-by-step procedure and questions Programming project(s) with solution
Status Introductory course materials available now Advanced course materials available early summer Developing a textbook to support both courses
Page 4
4ARM University ProgramCopyright © ARM Ltd 2014
Page 5
5ARM University ProgramCopyright © ARM Ltd 2014
Worldwide Adoption
Video introduction Nearly 100 adoptions since launch last summer North & South America, Europe, Asia, Africa
“We were delighted to be one of the first institutions to receive the ARM University Program's Lab-in-a-Box on Embedded Systems. It has immediately proven itself to me as an excellent resource for our research and teaching activities.” Dr. Boris Adryan, University of Cambridge, UK.
"Freescale is delighted to be building on our longstanding relationship with ARM by providing access to our solutions to universities and electronic engineering students around the world. The Lab-in-a-Box is just one way Freescale and ARM collaboratively reach out to our engineers of the future and help us create a new wave of innovative embedded technologies that will drive our increasingly connected world.“ Andy Mastronardi, Director, University Programs, Freescale
Page 6
6ARM University ProgramCopyright © ARM Ltd 2014
Cortex Processor Cores Cortex-A: application profile High performance, multiprocessing
Cortex-R: real-time profile Predictable performance
Cortex-M: microcontroller profile - optimized for embedded applications Implementation Short pipeline Fast interrupt response Low cost, low power Fast GPIO access
Instruction set Good code density (16-bit Thumb 2 instructions) Bit and byte operations Optional single-cycle multiply instruction, hardware divide, saturated math Optional DSP & SIMD instructions Optional floating point unit
Page 7
7ARM University ProgramCopyright © ARM Ltd 2014
Target Board – Freescale Freedom KL25Z 32-bit ARM Cortex-M0+ processor Freescale Kinetis MKL25Z128VLK4
microcontroller Extremely low power use 48 MHz max processor clock freq. 128 KB Flash ROM, 16 KB RAM Wide range of peripherals, including
USB on-the-go
FRDM-KL25Z board $13 (USD) Peripherals: 3-axis accelerometer, RGB
LED, capacitive touch slider Expansion ports are compatible with
Arduino shield ecosystem – endless opportunities, low-cost hardware mbed.org enabled - online software
development toolchain, reusable codeImages courtesy of Freescale
Page 8
8ARM University ProgramCopyright © ARM Ltd 2014
Hardware Ecosystem Arduino shields Wide variety Low cost High volume
Xtrinsic sensor board from element 14
Images courtesy of Freescale, Adafruit, Element 14, Parallax, Seeed Studio
Page 9
9ARM University ProgramCopyright © ARM Ltd 2014
And Even More Shields
Image courtesy of Seeed Studio
Page 10
10ARM University ProgramCopyright © ARM Ltd 2014
SOFTWARE DEVELOPMENT TOOLS
Page 11
11ARM University ProgramCopyright © ARM Ltd 2014
Software Development Suite: MDK-ARM Low cost tools for ARM7, ARM9, Cortex-M and Cortex-R4 MCUs Extensive support for many devices Core and peripheral simulation Flash support
Integrated development environment with ARM compiler Full (pro) version available for teaching, free
32 KB size-limited version available also Debugger with full access to program, core and peripherals Real-time trace on devices based on Cortex-M3 and M4
Real-Time Library KEIL RTX RTOS + Source Code TCP networking suite, Flash File System, CAN Driver Library, USB Device Interface
Debug Hardware Evaluation boards Separate support channel See www.keil.com
Page 12
12ARM University ProgramCopyright © ARM Ltd 2014
CURRICULUM OVERVIEW
Page 13
13ARM University ProgramCopyright © ARM Ltd 2014
Curriculum Overview Introductory Course: Building an Embedded System with a
Microcontroller Microcontroller concepts Software design basics ARM Cortex-M0+ architecture and interrupt system C as implemented in assembly language Peripherals and interfacing
Advanced Course: Embedded System Design, Analysis and Optimization Creating responsive multithreaded systems Optimizing code speed Optimizing system power and energy Optimizing memory requirements
Details in appendix
Page 14
14ARM University ProgramCopyright © ARM Ltd 2014
Introductory Course ModulesSoftware Design Basics
CMSIS Emb. SW EngineeringConcurrency
DMA
Cortex-M0+ Processor Core
Interrupts
Using ArduinoShields
HW & SW forRobustness Analog I/OGP I/O Serial
Comm.
C as Implementedin Assembly Lang.
Timers
Page 15
15ARM University ProgramCopyright © ARM Ltd 2014
Introduction to Embedded Systems What is an Embedded System? Why add a computer to the
larger system? Differences between… Embedded and general-purpose
computers Microcontrollers and
microprocessors Embedded system Functions Attributes Constraints Economics
Page 16
16ARM University ProgramCopyright © ARM Ltd 2014
Embedded MCU vs. General-Purpose CPU Both have a CPU core to execute
instructions Microcontroller has peripherals for
concurrent embedded interfacing and control Analog Non-logic level
signals Timing, communications Reliability and safety
Embedded systems have concurrent, reactive behaviors Must respond to sequences and
combinations of events Real-time systems have deadlines on
responses Typically must perform multiple
separate activities concurrently
Page 17
17ARM University ProgramCopyright © ARM Ltd 2014
Concurrent Hardware & Software Operation
Embedded systems rely on both MCU hardware peripherals and software to get everything done on time
Hardware HardwareSoftware Software Software
Time
Page 18
18ARM University ProgramCopyright © ARM Ltd 2014
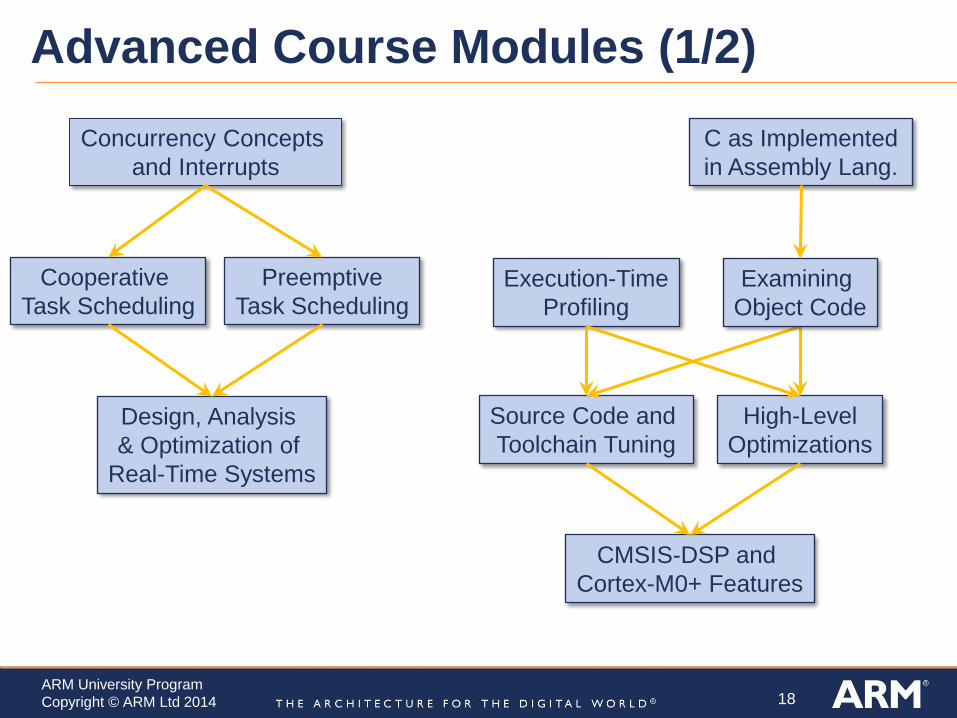
Advanced Course Modules (1/2)Concurrency Concepts
and Interrupts
Design, Analysis & Optimization of
Real-Time Systems
Cooperative Task Scheduling
PreemptiveTask Scheduling
CMSIS-DSP and Cortex-M0+ Features
Source Code and Toolchain Tuning
High-LevelOptimizations
Execution-TimeProfiling
Examining Object Code
C as Implementedin Assembly Lang.
Page 19
19ARM University ProgramCopyright © ARM Ltd 2014
Advanced Course Modules (2/2)Power & Energy
Modeling & Analysis
Optimizing Power and/or Energy with
Sleep and DVFS
Cortex M0+Core
KL25ZMCU
Tools for Analyzing Memory Use
C Program Memory Use Concepts
FreedomBoard
ROM Size Optimization
RAM SizeOptimization
Page 20
20ARM University ProgramCopyright © ARM Ltd 2014
COURSE MODULE DETAILS
Page 21
21ARM University ProgramCopyright © ARM Ltd 2014
INTRODUCTORY COURSE
Page 22
22ARM University ProgramCopyright © ARM Ltd 2014
Software Development, Processor & InterruptsModule Presentations Demonstration
CodeHomework and Test Questions
Laboratory Exercise
Programming Project
Introduction to Embedded Systems
Presentation Solutions
SW Design Basics: Concurrency, SW Eng. & CMSIS APIs
Presentation Solutions
Cortex-M0+ Processor Core
Presentation Solutions Text Processing in Assembly Language• Lab Exercise• Code
Integer Square Root Approximation• Assignment• Starter code• Solution
C Code as Implemented in Assembly Language
Presentation C/Asm Demo 1 Code,Demo 2 Code
Solutions, source project
Examining Toolchain Output• Lab Exercise• Code
Interrupts Presentation Interrupt Demo Code, Notes
Solutions, spreadsheet
Measuring Interrupt Timing• Lab Exercise
Human Response Timer• Assignment• Solution
Page 23
23ARM University ProgramCopyright © ARM Ltd 2014
Using PeripheralsGeneral Purpose Digital Interfacing
Presentation GPIO Demo Code (includes Basic Light Switch, RGB LED Flasher, Speaker tone generator, Text LCD with parallel bus)
Solutions, Spreadsheet
Basic User Interface with LCD and switches• Lab Exercise • Code
Slide Whistle• Assignment• Solution
Analog Interfacing Presentation Analog Interfacing Demo Code
Interfacing withArduino Analog Devices
Solutions, spreadsheet
ADC: Voltmeter• Lab Exercise• CodeComparator: Voltage Monitor• Lab Exercise• CodeDAC: Signal Generator• Lab Exercise• Code
Infrared Proximity Sensor• Assignment• Solution
Timers Presentation Timer Demo Code Solutions, spreadsheet
Signal Generator with Precision Timing and Buffering• Lab Exercise • Code• Solution
Clock with Pulsing LED• Assignment• SolutionUsing PWM to control motor Speed• Assignment• Solution
Page 24
24ARM University ProgramCopyright © ARM Ltd 2014
Using PeripheralsSerial Communication
Presentation I2C and Accelerometer
Creating a Console Interface with a UART
Interfacing with Arduino Serial Devices
Solutions UART Performance Analysis• Lab Exercise• Code
UART: Creating a Speedometer with a GPS Receiver• Assignment• SolutionInterfacing with an SD memory card using SPI• Assignment• Solution
Improving System Robustness with Hardware and Software
Presentation Watchdog Timer
Stack Overflow Detection
Solutions Testing an embedded system’s robustness• Lab Exercise• Code
Making a system robust• Assignment • Solution
Using Direct Memory Access to Improve Performance
Presentation Memory Copy & ISR Replacement
Solutions Evaluating Memory Copy Speeds• Lab Exercise• Code
DMA: Upgrading from ISRs to DMA• Assignment• Solution
Page 25
25ARM University ProgramCopyright © ARM Ltd 2014
ADVANCED COURSE
Page 26
26ARM University ProgramCopyright © ARM Ltd 2014
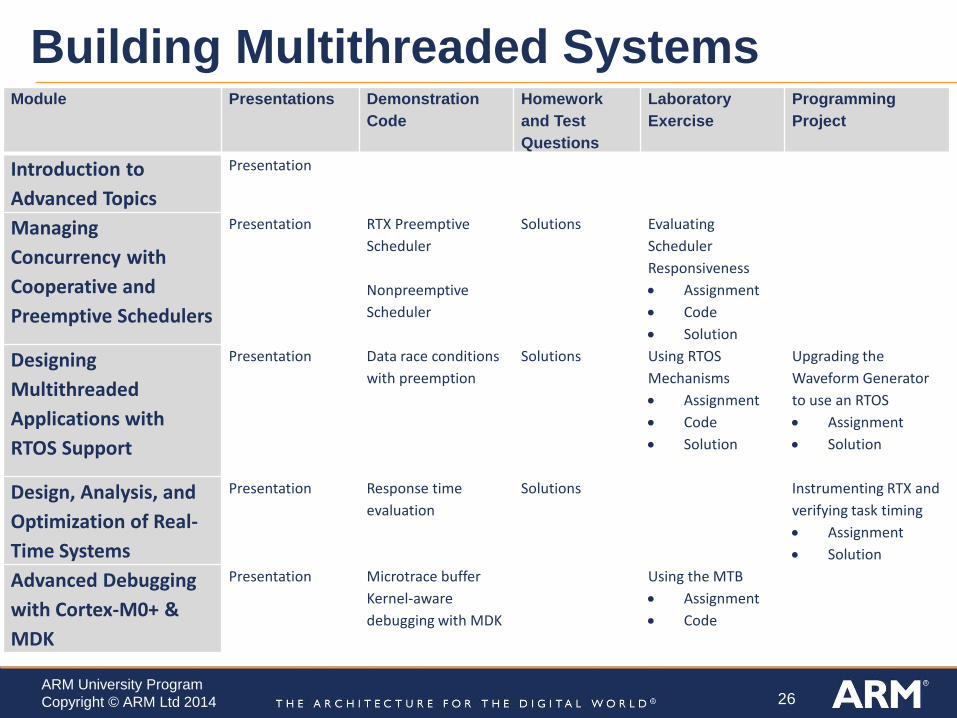
Building Multithreaded SystemsModule Presentations Demonstration
CodeHomework and Test Questions
Laboratory Exercise
Programming Project
Introduction to Advanced Topics
Presentation
Managing Concurrency with Cooperative and Preemptive Schedulers
Presentation RTX Preemptive Scheduler
NonpreemptiveScheduler
Solutions Evaluating Scheduler Responsiveness• Assignment• Code• Solution
Designing Multithreaded Applications with RTOS Support
Presentation Data race conditions with preemption
Solutions Using RTOS Mechanisms• Assignment• Code• Solution
Upgrading the Waveform Generator to use an RTOS• Assignment• Solution
Design, Analysis, and Optimization of Real-Time Systems
Presentation Response time evaluation
Solutions Instrumenting RTX and verifying task timing• Assignment• Solution
Advanced Debugging with Cortex-M0+ & MDK
Presentation Microtrace bufferKernel-aware debugging with MDK
Using the MTB• Assignment• Code
Page 27
27ARM University ProgramCopyright © ARM Ltd 2014
Performance Analysis and OptimizationModule Presentations Demonstration
CodeHomework and Test Questions
Laboratory Exercise
Programming Project
Profiling Program Execution Time
Presentation Profiling Spherical Geometry Calculations
Solutions Profiling Lab• Lab Exercise• Code
Tilt-compensated compass profiling• Assignment• Solution
Examining Object Code without Getting Lost
Presentation Sample program Solutions
Speed Optimization with Toolchain Tuning
Presentation Tuning the toolchain Solutions Evaluating Compiler Optimizations• Lab Exercise• Code
Toolchain tuning for the TC compass• Assignment• Solution
Speed Optimization with Program Transformations
Presentation Optimizing Spherical Geometry Calculations
Solutions Code optimization for the TC compass• Assignment• Solution
DSP Acceleration with Cortex-M0+ and the CMSIS-DSP Library
Presentation Real-time audio filtering
Solutions Using the CMSIS-DSP library for an ultrasonic rangefinder• Assignment• Solution
Page 28
28ARM University ProgramCopyright © ARM Ltd 2014
Power and Energy Analysis and OptimizationModule Presentations Demonstration
CodeHomework and Test Questions
Laboratory Exercise
Programming Project
Power and Energy Analysis
Presentation Solutions Freedom Board Power Analysis Lab • Lab Exercise• CodeFreedom BoardEnergy Analysis• Lab Exercise• Code
KL25Z Features for Low Power and Energy
Presentation Evaluating Power in Active and Sleep Modes
Solutions Evaluating KL25Z Low-Power Standby Modes• Lab Exercise• CodeKL25Z Voltage and Frequency Scaling• Lab Exercise• Code
Optimizing Power orEnergy Use
Presentation Analyzing and optimizing data logger energy use
Solutions This Side Up: Optimizing an orientation logger for lower energy use• Assignment• Solution
Page 29
29ARM University ProgramCopyright © ARM Ltd 2014
Memory Analysis and OptimizationModule Presentations Demonstration
CodeHomework and Test Questions
Laboratory Exercise
Programming Project
Profiling and Reducing ROM and RAM Memory Requirements
Presentation Graphics rendering size profiling and optimization
Solutions Evaluating the impact of the compileroptimizations and toolchain options
Reducing RAM and ROM for a multithreaded system• Assignment• Solution
Page 30
30ARM University ProgramCopyright © ARM Ltd 2014
INTRODUCTORY COURSE
Page 31
31ARM University ProgramCopyright © ARM Ltd 2014
Introduction to Embedded Systems Design Embedded System Fundamentals Concurrency Software Engineering for Embedded Systems CMSIS Improving System Robustness with Hardware and Software
Processor Cortex-M0+ Processor Core C Code as Implemented in Assembly Language Interrupts
Using Peripherals General Purpose Digital Interfacing Analog Interfacing Timers Serial Communication Direct Memory Access
Page 32
32ARM University ProgramCopyright © ARM Ltd 2014
Introduction to Embedded Systems What is an Embedded System? Why add a computer to the
larger system? Differences between… Embedded and general-purpose
computers Microcontrollers and
microprocessors Embedded system Functions Attributes Constraints Economics
Page 33
33ARM University ProgramCopyright © ARM Ltd 2014
Software Design Basics Concurrency in software and
hardware Peripherals Software tasks
Task scheduling and response time Prioritization Preemption
Software engineering Development models Design before coding Graphical representations:
statecharts, flowcharts, sequence diagrams
Essential UML Peer review Testing concepts
Time
StaticDec CheckRec Sw LCD
Dec CheckRec
Dynamic Run-to-Completion
Dec Check
Dynamic Preemptive
Page 34
34ARM University ProgramCopyright © ARM Ltd 2014
Cortex Microcontroller Software Interface Standard Vendor-independent
hardware abstractionlayer for Cortex-M
Standardizes interfaces to Processor core Peripherals Debug access port RTOS
Provides Optimized libraries
of DSP functions in fixed and floating point
Peripheral system view description
Page 35
35ARM University ProgramCopyright © ARM Ltd 2014
Cortex-M0+ CPU Core Processor core registers Memory space, contents and
addressing ARMv6-M Thumb instruction set
overview
Page 36
36ARM University ProgramCopyright © ARM Ltd 2014
C as Implemented in Assembly Language We program in C for convenience,
but should understand the assembly code implementing it Code efficiency Ease of analysis
An overview of what C gets compiled to C start-up module Register use Activation records Subroutines Data types &
classes Using pointers Control flow
Lower address (Free stack space)
Activation record for current function
Local storage <- Stack ptrReturn address
Arguments
Activation record for caller function
Local storageReturn address
ArgumentsActivation record for caller’s caller
function
Local storageReturn address
ArgumentsHigher address
Activation record for caller’s caller’s
caller function
Local storageReturn address
Arguments
Page 37
37ARM University ProgramCopyright © ARM Ltd 2014
Exceptions and Interrupts Exception and Interrupt Concepts Vector table Stack use Processing sequence Entering an Exception Handler Exiting an Exception Handler
Cortex-M0+ Interrupts NVIC interrupt controller, exception
mask, prioritization Using Port Module and External
Interrupts Timing Analysis Program Design with Interrupts Sharing Data Safely Between ISRs
and Other Threads Data atomicity and race conditions Volatile data
Page 38
38ARM University ProgramCopyright © ARM Ltd 2014
General-Purpose I/O GPIO Basic Concepts Port Circuitry Control Registers Accessing Hardware Registers in C Clocking and Muxing
Circuit Interfacing Inputs Switches
Outputs LEDs Speaker
Both Interfacing with a Text LCD
PDOR select
PDIR select
PDDR select
Data Bus bit n
Port Data Direction Register
D Q
Port Data Output
RegisterD Q
AddressDecoder
Address Bus
Pin or Pad on
package
Port Data Input
RegisterD Q
I/O Clock
TglRstSet
PSOR selectPCOR selectPTOR select
Pin Control Register
MUX field
Page 39
39ARM University ProgramCopyright © ARM Ltd 2014
Demo, Lab and Project Demo Basic Light Switch RGB LED Flasher Speaker tone generator
Lab Interfacing with a generic text LCD
and switches Can target Arduino LCD + switch
shield instead Project Slide whistle sound effect generator
Page 40
40ARM University ProgramCopyright © ARM Ltd 2014
Analog Interfacing Analog and digital domains Quantization and transfer functions Sampling
Converters DAC Comparator ADC – flash, successive approximation
KL25Z Peripherals Digital to analog converter Analog comparator Reference voltage DAC
Analog to digital converter Clock configuration Input channel multiplexer Conversion triggers Special features: averaging, low power,
repeat, automatic compareVo
ltage
TimeStart of Conversion
Test voltage(DAC output)
T1 T2 T3 T4 T5 T6000000
111111
100000100100
AnalogInput
know
1xx
xxx,
try
1100
00
100110
know
xxx
xxx,
try
1000
00
know
10x
xxx,
try
1010
00
know
100
xxx,
try
1001
00
know
100
1xx,
try
1001
10
know
100
11x,
try
1001
11
know
100
110.
Don
e.
Page 41
41ARM University ProgramCopyright © ARM Ltd 2014
Demos, Labs and Projects Demo Measure voltage with ADC Detect low voltage with comparator Waveform generator with DAC
Labs ADC – Supply voltage monitor Comparator – Low voltage alarm DAC – Waveform generator
Project Infrared proximity sensor using ADC and
digital output
Object present, reflects IR back to receiver
Page 42
42ARM University ProgramCopyright © ARM Ltd 2014
Timers Concepts Elapsed time measurement Event counting Periodic interrupts Input capture Output compare Pulse-width modulation Software data queues
KL25Z Timers Periodic Interrupt Timer Timer/PWM Module Low-Power Timer Sys Tick
Interrupt
Clock
Read current timer value (TVL) from PIT_CVALn
PresettableBinary Counter Interrupt
ReloadStart Value
Read/write timer start value (TSV) from PIT_LDVALn
Page 43
43ARM University ProgramCopyright © ARM Ltd 2014
Demo, Lab and Project Demo Count interrupts, adjust PWM signal
based on board tilt as measured by accelerometer
Lab Signal generator with precision timing
and buffering Projects Time-of-day clock with pulsing LED Using PWM to control a motor’s
speed
Page 44
44ARM University ProgramCopyright © ARM Ltd 2014
Serial Communications Serial communications Concepts Tools Software: polling, interrupts and
buffering Processing binary and text messages
UART communications Concepts KL25 I2C peripheral
SPI communications Concepts KL25 SPI peripheral
I2C communications Concepts KL25 I2C peripheral
Tbit *1.5
Databits
Data Sampling Time at
Receiver
Tbit *2.5
Tbit *3.5
Tbit *4.5
Tbit *5.5
Tbit *6.5
Tbit *7.5
Tbit *8.5
Tbit *9.5
Tbit *10.5
Time
Zero
SerialInterface
tx_isr rx_isr
get_stringsend_string
Start Talker +Sentence
Type
SentenceBody
Checksum1
Checksum2
$Append char to buf.
Any char. except *, \r or \nAppend char to buf.Inc. counter
*, \r or \n, non-text, orcounter>6 buf==$SDDBT,
$VWVHW, or $YXXDREnqueue all chars. from buf
Any char. except *Enqueue char
*Enqueue char
Any char.Save as checksum1
/r or /n
Any char.Save as checksum2
Page 45
45ARM University ProgramCopyright © ARM Ltd 2014
Demo, Lab and Projects Demo I2C communication with onboard accelerometer Console interface with a UART
Lab UART performance and timing analysis
Projects UART: Creating a speedometer with a GPS receiver SPI: Interfacing with an SD memory card
Page 46
46ARM University ProgramCopyright © ARM Ltd 2014
Improving System Robustness
Low voltage detector
Watchdog timer
Defensive programming
Stack depth analysis
Testing and test coverage
Time
WDTValue
Start WDTWDT times out,resets system
Restart WDT Restart WDT
Global Data
Heap
A Stack
B Stack
Instructions
Thread A
Thread B
SF Regs
Monitor RAM
Page 47
47ARM University ProgramCopyright © ARM Ltd 2014
Direct Memory Access Basic Concepts DMA peripheral Selecting trigger sources
DMA Peripherals in Cortex-M0+
DMA Applications Data Transfer Replacing ISRs
Page 48
48ARM University ProgramCopyright © ARM Ltd 2014
Demo, Lab and Project Demo Memory copy Waveform playback to DAC without
ISR Lab Evaluate memory copy speed with
different DMA configurations Project Remote data acquisition system with
serial control and analog data input
Page 49
49ARM University ProgramCopyright © ARM Ltd 2014
ADVANCED COURSE
Page 50
50ARM University ProgramCopyright © ARM Ltd 2014
Advanced Design, Analysis and Optimization Advanced Scheduling and Design Cooperative and Preemptive Schedulers Designing Multithreaded Systems Sharing Data Safely with RTOS Support Timing Analysis of Real-Time Systems Advanced Debugging with Cortex-M0+
Analysis and Optimizations Code Execution Speed Analysis Optimization
Power and Energy Analysis and Modeling Optimization
Memory Requirements Analysis Optimization
Page 51
51ARM University ProgramCopyright © ARM Ltd 2014
Cooperative and Preemptive Schedulers Task scheduling and response time Prioritization and preemption
Non-preemptive scheduling Task states and scheduling rules Scheduler implementation RTX API and example Limitations Response time Prioritization Software structure
Preemptive scheduling Task states and scheduling rules Scheduler implementation and context switching mechanics RTX API and example Limitations Data sharing Memory use
Page 52
52ARM University ProgramCopyright © ARM Ltd 2014
Designing Multithreaded Systems What is in an RTOS? Bounded response times Preemption Time management Synchronization
Task creation & control Signaling events Sharing data safely Concepts Data atomicity Readers and writers Race conditions
Mechanisms Synchronization objects Scheduler lock Interrupt masking
Keil RTX Real-Time Operating System
Page 53
53ARM University ProgramCopyright © ARM Ltd 2014
Creating Real-Time Systems Periodic task model Releases, periods and
deadlines Worst-case execution time
(analytical and empirical) Simplifying assumptions
Metrics Response time Schedulability
Priority-based scheduling Priority assignment
Fixed priority (RM, DM) Response time analysis Utilization bound schedulability test
Dynamic priority (EDF) Response time analysis Utilization bound schedulability test
P1
P2
P3
0 1 2 3 4 5 6 7 8 9 10 11 12Time
P1 P1 P1
P2 P2
P3
jihpj j
iii C
TRCR ∑
∈
+=
)(
( )12 /1 −= mMax mU
Page 54
54ARM University ProgramCopyright © ARM Ltd 2014
Handling More Complex RT Systems Supporting aperiodic tasks
Non-zero context switch times
Dependencies between tasks
Dealing with priority inversion
Dealing with WCET >> ACET
Supporting different deadlines
jihpj j
niii C
TaBCR ∑
∈
++=
)(
M
L
M
H
L
H
12
3 4
5R
R
L
Page 55
55ARM University ProgramCopyright © ARM Ltd 2014
Lab and Projects Lab – Response Time Comparison Non-preemptive, non-prioritized Non-preemptive, prioritized Preemptive, prioritized
Projects Worst-case execution time analysis
for the Cortex-M0+ Instrumenting RTX and verifying task
timing
Image courtesy Sparkfun
Page 56
56ARM University ProgramCopyright © ARM Ltd 2014
Advanced Debugging with Cortex-M0+
CoreSight Micro Trace Buffer Data Watchpoints Hardware breakpoints
Kernel-aware debugging in Keil MDK
Page 57
57ARM University ProgramCopyright © ARM Ltd 2014
Code Execution Speed Analysis Overview
Timing Methods Timer peripheral Scope with twiddle bits
Profiling Methods Program counter sampling Hardware trace support
Object Code Inspection How to keep from getting lost
Page 58
58ARM University ProgramCopyright © ARM Ltd 2014
Code Execution Speed Optimization Rationale and Trade-offs Design-time vs. Compile-time Optimizations Maintainability and Portability vs. Fast Code The Evils of Premature Optimization Trust but Verify (the Compiler)
Using the Compiler to the Fullest What should the compiler be able to do? Helping and persuading the compiler Precalculation
Algorithms, Data Organization and Data Structures Math Fixed point and integer math Reduced precision floating-point math Polynomial approximations
Page 59
59ARM University ProgramCopyright © ARM Ltd 2014
Cortex-M Optimizations CMSIS-DSP Library Primarily supports vectors and matrices for DSP Versions optimized for Cortex-M0, M0+, M3, or M4 Data types Floating point Fixed point: q7, q15, q31, q63
Wide range of functions available Basic math, fast math, complex math Filters, transforms, matrix functions Motor control, Statistical functions Support functions Interpolation functions
Cortex-M0+-specific coding practices
Page 60
60ARM University ProgramCopyright © ARM Ltd 2014
Demo and Project Demos Profiling and optimizing spherical
geometry code Project Profiling and optimizing a tilt-compensated
compass
Page 61
61ARM University ProgramCopyright © ARM Ltd 2014
Power and Energy Analysis Modeling fundamentals Basic models Static & dynamic power
Optimizing for power vs. energy Power systems Voltage regulators and switching
converters Switches (diodes and transistors)
Modeling system power Measuring current and power KL25Z processor Freedom board Sampling V and I
Measuring energy Sampling V and I and integrating Using an ultracapacitor
Cap
acito
r Vol
tage
Time
V1
Δt
V2
Page 62
62ARM University ProgramCopyright © ARM Ltd 2014
Demos and Labs Demos Power measurement Ultracapacitor-based
energy measurement
Labs Freedom board power analysis –
where does the power go? Energy analysis – how long will the
ultracap power the board?
PowerMCU???
MCU Current (µA) at VDD = 3VMode Normal LL VLL VLPRun 5000 250Wait 3700 135Stop 345 1.9 4.4Stop 3 1.4Stop 1 0.77Stop 0 0.38
Page 63
63ARM University ProgramCopyright © ARM Ltd 2014
Power and Energy Optimization System optimization challenges Optimizations for peripherals Standby and low-power modes Clock gating Voltage scaling and conversion Frequency scaling
Optimizations for the MCU Voltage scaling Clock frequency scaling Voltage and frequency scaling Active & sleep modes
Integrating power and energy management into task schedulers Non-real-time systems Real-time systems
0.00.20.40.60.81.01.21.41.6
Pow
er (m
W)
Average Power
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
0 10 20 30 40 50
Aver
age
Pow
er (m
W)
MCU Clock Frequency (MHz)
PActive
PSleep
Paverage
Page 64
64ARM University ProgramCopyright © ARM Ltd 2014
Analysis of Memory Requirements Memory is free up to a point … after
which it becomes expensive
Reducing memory requirements may enable Use of a less expensive MCU Implementation of a more
sophisticated algorithm More diagnostic code More fault logging
Determining Memory Requirements Program memory use Static, automatic and dynamic data Code memory
Understanding the linker map file
Page 65
65ARM University ProgramCopyright © ARM Ltd 2014
Optimization of Memory Requirements
Optimizing Data Memory Language support for read-only data Toolchain support Memory models Data sizes Packed data structures and bitfields
Improving stack memory size estimation Shrinking activation records Using stack-friendly functions
Page 66
66ARM University ProgramCopyright © ARM Ltd 2014
Optimization of Memory Requirements Optimizing Code Memory Language support Toolchain configuration Function outlining Memory models Optimized library variants
Improving similar or identical code
Optimization for Multitasking Systems Improving the accuracy of stack
memory estimates Reducing or eliminating preemption Combining tasks to reduce stack
count Preemption threshold scheduling
Task
1 M
ax S
tack
Task
2 M
ax S
tack
Task
3 M
ax S
ta
Task 1 Statics Task 2 StaticsTask 3 StaticsTask 4 Statics
Preemptive DynamicNon-preemptive Dynamic
Task
1 M
ax S
tack
Task
2 M
ax S
tack
Task
3 M
ax S
tack
Task
4 M
ax S
tack
Task 1 Statics Task 2 StaticsTask 3 StaticsTask 4 Statics
Page 67
67ARM University ProgramCopyright © ARM Ltd 2014
EXAMPLE PROJECTS
Page 68
68ARM University ProgramCopyright © ARM Ltd 2014
INFRARED PROXIMITY SENSOR
Page 69
69ARM University ProgramCopyright © ARM Ltd 2014
Concepts
Detect object by shining infrared light and measuring impact on ambient light level
Components Infrared LED – emits IR light Infrared phototransistor – conducts more current as IR increases
No object present, noIR reflected back to receiver
Object present, reflects IR back to receiver
Page 70
70ARM University ProgramCopyright © ARM Ltd 2014
Using Differential Measurements
Basic approach of measuring ambient + reflected light is unreliable Vulnerable to changes in
ambient light due to flicker in light sources, shadows, etc.
Use differential measurements instead Measure brightness with
IRLED off Measure brightness with
IRLED on Difference in brightness levels
indicates amount of IR reflected
Measure IR level with IRLED off
Measure IR level with IRLED on
Page 71
71ARM University ProgramCopyright © ARM Ltd 2014
Response Time Issues IR Sensor (phototransistor)
does not respond instantaneously Has internal capacitance which
must be charged or discharged Rate of change depends on
brightness
Need to introduce time delay in processing sequence Change IRLED value Wait for some time for sensor to
respond Read IR Sensor
IRLED
OnOff
OnOff
On
IR SensorDarker
Lighter
Page 72
72ARM University ProgramCopyright © ARM Ltd 2014
BUBBLE LEVEL WITH TEXT LCD
Page 73
73ARM University ProgramCopyright © ARM Ltd 2014
Learning Objectives
Configuring GPIO pins for input and output
Interfacing with Text LCD controller
Developing Code Printing text Interfacing with
accelerometer
Page 74
74ARM University ProgramCopyright © ARM Ltd 2014
Text LCD Module
MCU
LCD Controller (HD44780
or equivalent)
LCD Glass
Driver
16 Rows
Serial Data Driver
40 Columns 40 Col. 40 Col.
Enable ERead/~Write R/~WRegister Select RS
Data Bus DB0-7
Contrast Adjustment
VO
GroundVSS
SupplyVDD
Hardware Overview
MCU communicates with LCD controller via Parallel data bus (DB0-7) Read/~Write Register Select (register or data?) Enable
LCD controller interprets commands from MCU Write to display memory Change configuration Read status Read memory
Page 75
75ARM University ProgramCopyright © ARM Ltd 2014
LCD Controller InstructionsInstruction Code DescriptionRS R/W B7 B6 B5 B4 B3 B2 B1 B0
Clear display 0 0 0 0 0 0 0 0 0 1 Clears display and returns cursor to the home position (address 0).
Cursor home 0 0 0 0 0 0 0 0 1 * Returns cursor to home position.
Entry mode set 0 0 0 0 0 0 0 1 I/D SSets cursor move direction (I/D); specifies to shift the display (S). These operations are performed during
data read/write.
Display on/off control 0 0 0 0 0 0 1 D C B Sets on/off of all display (D), cursor on/off (C), and blink of cursor position character (B).
Cursor/display shift 0 0 0 0 0 1 S/C R/L * * Cursor-move or display-shift (S/C), direction (R/L).
Function set 0 0 0 0 1 DL N F * * Sets interface data length (DL), number of display line (N), and character font (F).
Set CGRAM address 0 0 0 1 CGRAM address Sets the CGRAM address. CGRAM data are sent and received after this setting.
Set DDRAM address 0 0 1 DDRAM address Sets the DDRAM address. DDRAM data are sent and received after this setting.
Read busy flag &address counter 0 1 BF CGRAM/DDRAM address
Reads busy flag (BF) indicating internal operation being performed and reads CGRAM or DDRAM
address counter contents.Write CGRAM or
DDRAM 1 0 Write Data Write data to CGRAM or DDRAM.
Read from CG/DDRAM 1 1 Read Data Read data from CGRAM or DDRAM.
Page 76
76ARM University ProgramCopyright © ARM Ltd 2014
POWER AND ENERGY MEASUREMENT LAB
Page 77
77ARM University ProgramCopyright © ARM Ltd 2014
Learning Objectives Using a timer peripheral Low-power timer configuration
Interrupt handlers
Low-Power MCU operation Low power modes Run and stop modes Low-leakage wakeup unit
Measuring power and energy Concepts Using an ultracapacitor
Page 78
78ARM University ProgramCopyright © ARM Ltd 2014
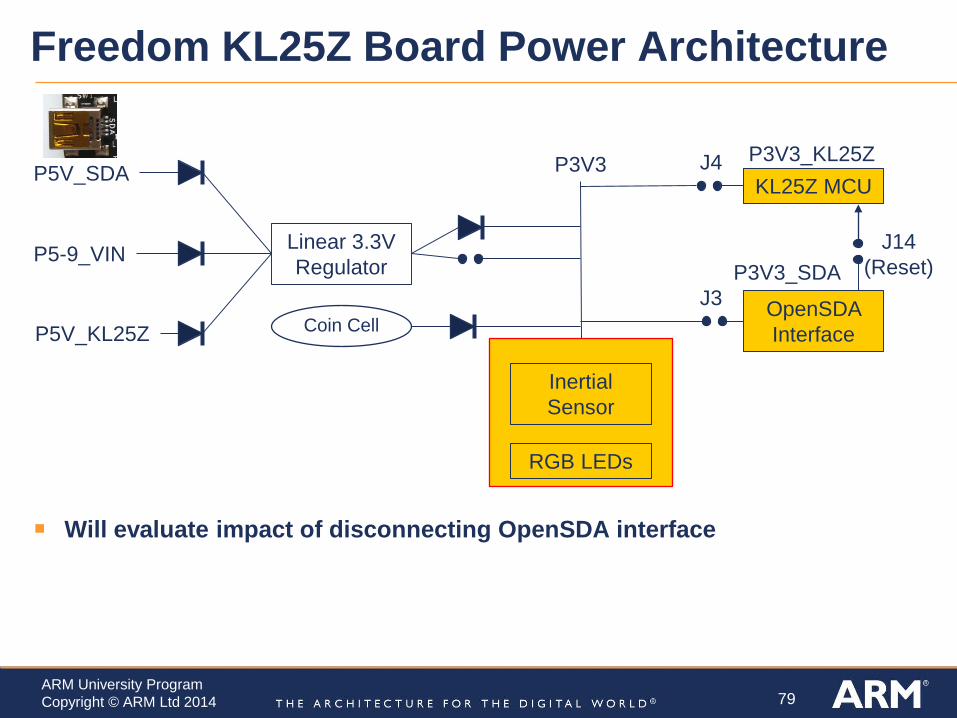
System Power
The MCU uses up to 15 to 20 mW Many embedded systems have peripheral circuitry, and that also draws
power So we need to consider that as well. The Freedom board is no exception – it is a good example.
Page 79
79ARM University ProgramCopyright © ARM Ltd 2014
Freedom KL25Z Board Power Architecture
Will evaluate impact of disconnecting OpenSDA interface
P5V_SDA
P5-9_VIN
P5V_KL25Z
Linear 3.3V Regulator
Coin Cell
P3V3 P3V3_KL25Z
P3V3_SDA
Inertial Sensor
OpenSDAInterface
RGB LEDs
KL25Z MCU
J3
J14(Reset)
J4
Page 80
80ARM University ProgramCopyright © ARM Ltd 2014
How Do We Measure Energy? Energy 𝑊𝑊(𝑇𝑇) = ∫0
𝑇𝑇 𝑉𝑉 𝑡𝑡 𝐼𝐼 𝑡𝑡 𝑑𝑑𝑡𝑡
V and I will vary as we turn on and off devices, change clock speeds, etc.
We need something to integrate power over time
Solutions: Use sampling energy meter, but low sample rate will limit accuracy MCU make wake up for only a few microseconds before going to
sleep Power the circuit from a capacitor with a known capacitance C, then
calculate capacitor energy before and after test
Page 81
81ARM University ProgramCopyright © ARM Ltd 2014
Capacitor-Based Energy Measurement Measure capacitor voltage before (V1)
and after (V2) The energy W used by the circuit can
be calculated 𝑊𝑊 = 𝐶𝐶 𝑉𝑉12−𝑉𝑉22
2
Average power is energy divided by time
𝑃𝑃 = 𝐶𝐶 𝑉𝑉12−𝑉𝑉22
2𝑡𝑡
A constant current load I will take tseconds to discharge the capacitor from V1 to V2:
𝑡𝑡 = 𝐶𝐶 (𝑉𝑉1 −𝑉𝑉2 )𝐼𝐼
A constant resistance load R will take t seconds to discharge the capacitor from V1 to V2:
𝑡𝑡 = −𝐶𝐶𝐶𝐶 𝑙𝑙𝑙𝑙 𝑉𝑉2𝑉𝑉1
Cap
acito
r Vol
tage
Time
V1
Δt
V2
Page 82
82ARM University ProgramCopyright © ARM Ltd 2014
Summary Ready-to-use teaching material Supports range of embedded systems courses Introductory Programming a microcontroller in C
Advanced Optimizing response time Optimizing execution speed Optimizing memory use Optimizing power and energy
Targets Freescale Freedom-KL25Z MCU platform
For more information, contact [email protected] [email protected] www.arm.com/university