Speed Control System. Team Green. Steady State and Step Response Performance. John Barker John Beverly Keith Skiles UTC ENGR329-001 2-15-06. Outline. System Background Description, SSOC, Step Response FOPDT Model Model Theory Results Conclusions. Aerator Mixer Speed Control System. - PowerPoint PPT Presentation
61
Team Green Team Green John Barker John Barker John Beverly John Beverly Keith Skiles Keith Skiles UTC ENGR329-001 UTC ENGR329-001 2-15-06 2-15-06 Steady State and Step Steady State and Step Response Performance Response Performance Speed Control Speed Control System System
Transcript
Team GreenTeam GreenJohn BarkerJohn BarkerJohn BeverlyJohn BeverlyKeith SkilesKeith Skiles
UTC ENGR329-001UTC ENGR329-0012-15-062-15-06
Steady State and Step Response Steady State and Step Response PerformancePerformance
Speed Control SystemSpeed Control System
OutlineOutline
System BackgroundSystem Background– Description, SSOC, Step ResponseDescription, SSOC, Step Response
FOPDT ModelFOPDT Model Model TheoryModel Theory ResultsResults ConclusionsConclusions
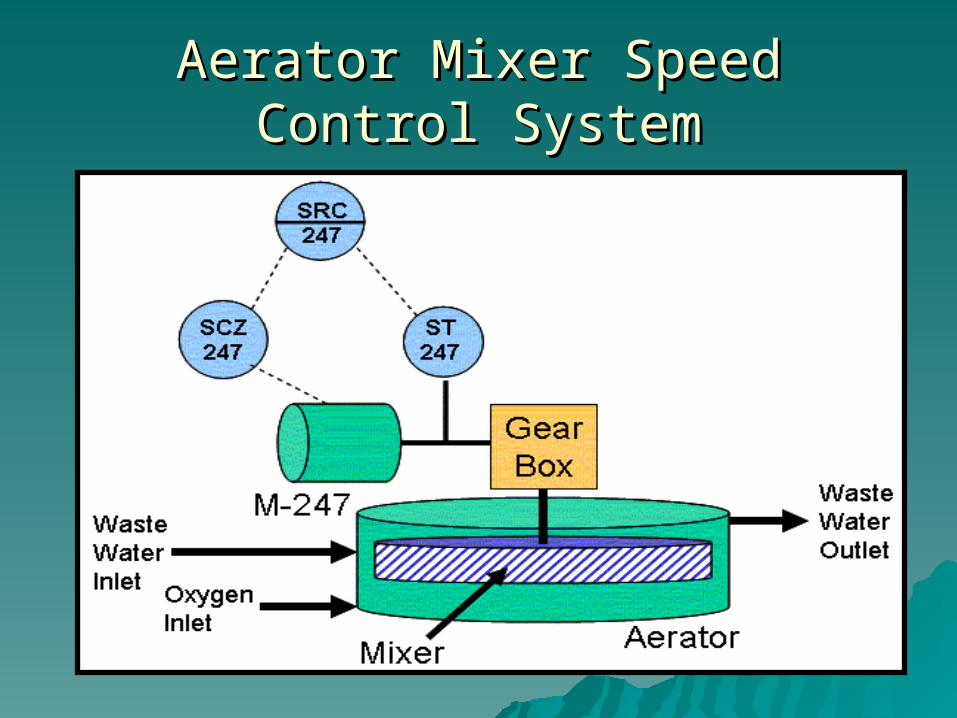
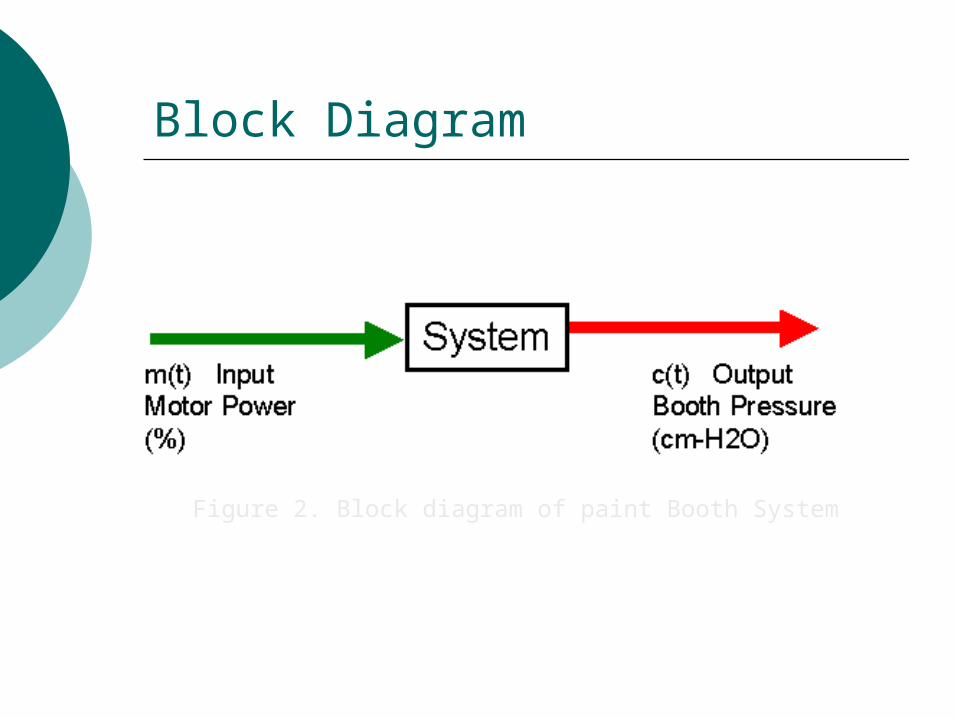
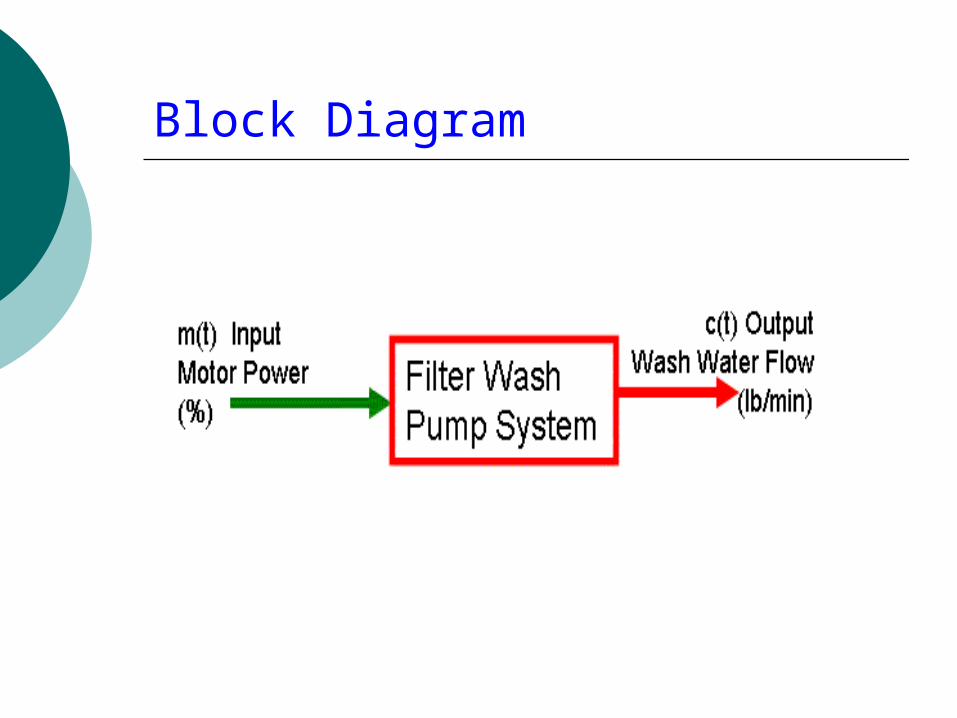
Aerator Mixer Speed Control Aerator Mixer Speed Control SystemSystem
Block Diagram of SystemBlock Diagram of System
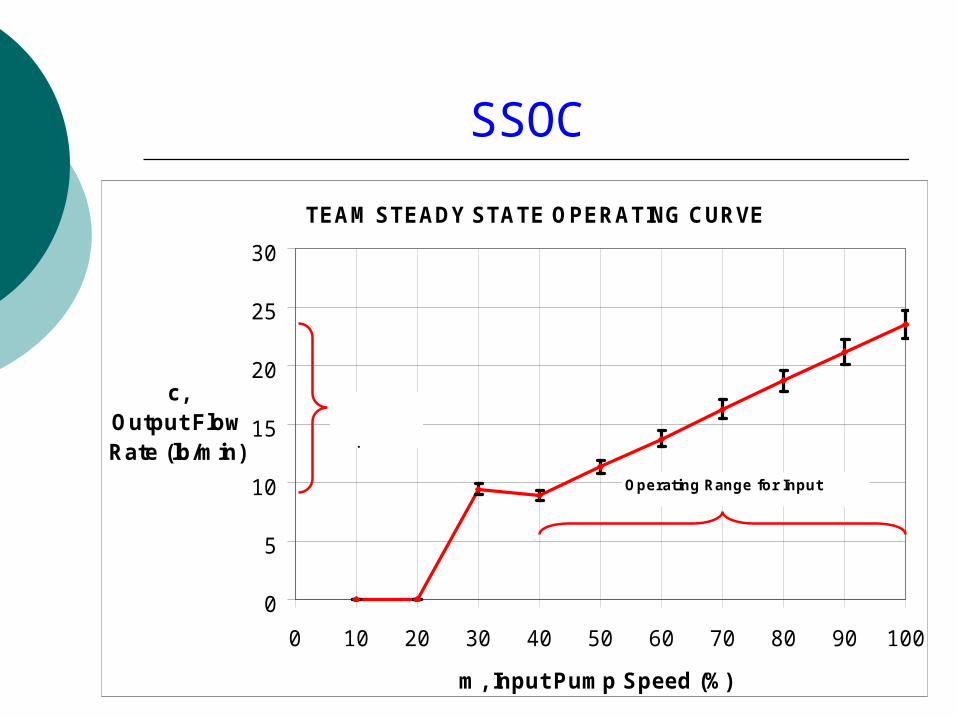
Steady State Operating Curve
0
200
400
600
800
1000
1200
1400
1600
1800
0 20 40 60 80 100
Motor Input (%)
Sp
eed
Ou
tpu
t (R
PM
)
Slope = 17.4
Sample Step Response Curve
0
100
200
300
400
500
600
700
800
0 2 4 6 8 10
Time (s)
Ou
tpu
t (R
PM
)
Steady State Operating Curve
0
200
400
600
800
1000
1200
1400
1600
1800
0 20 40 60 80 100
Motor Input (%)
Sp
eed
Ou
tpu
t (R
PM
)
Low
High
Mid
Time Response (Gain)Time Response (Gain)
Gain
17
17.1
17.2
17.3
17.4
17.5
Low Up Mid Up High Up Low Down Mid Down High Down
System Gain (RPM/%)
Time Response (Dead Time)Time Response (Dead Time)Dead Time (s)
0.08
0.09
0.1
0.11
0.12
Low Up Mid Up High Up Low Down Mid Down High Down
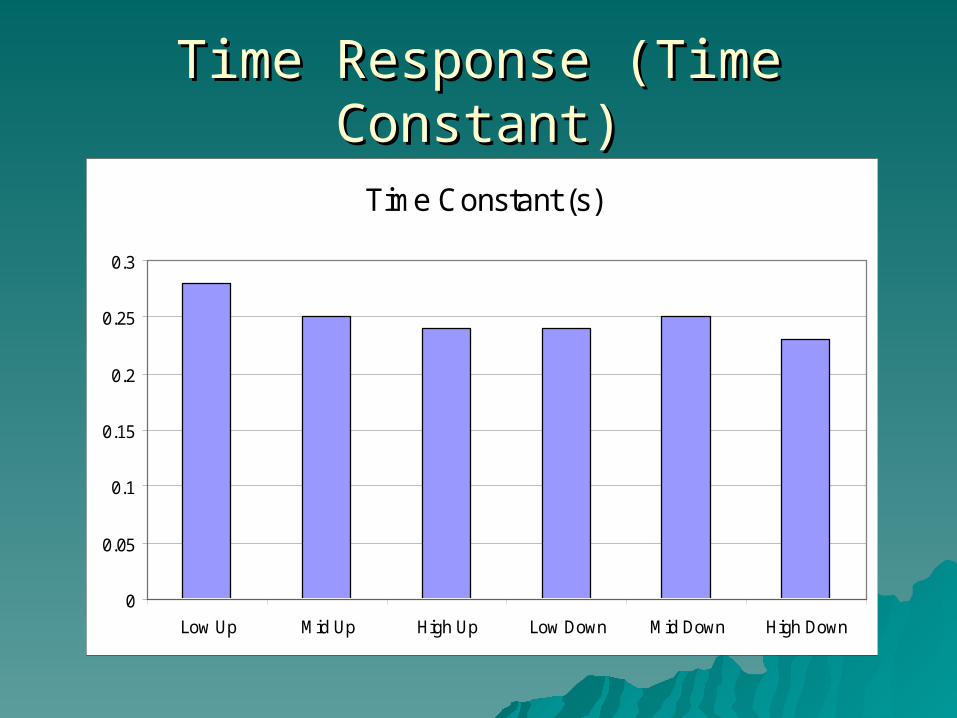
Time Response (Time Constant)Time Response (Time Constant)
Time Constant (s)
0
0.05
0.1
0.15
0.2
0.25
0.3
Low Up Mid Up High Up Low Down Mid Down High Down
Step Response Values and ErrorsStep Response Values and Errors
K (RPM/%) t0 (s) τ (s)
Average 17.4 0.11 0.25
Std. Dev 0.05 0.006 0.017
Laplace Domain FOPDT ModelLaplace Domain FOPDT Model
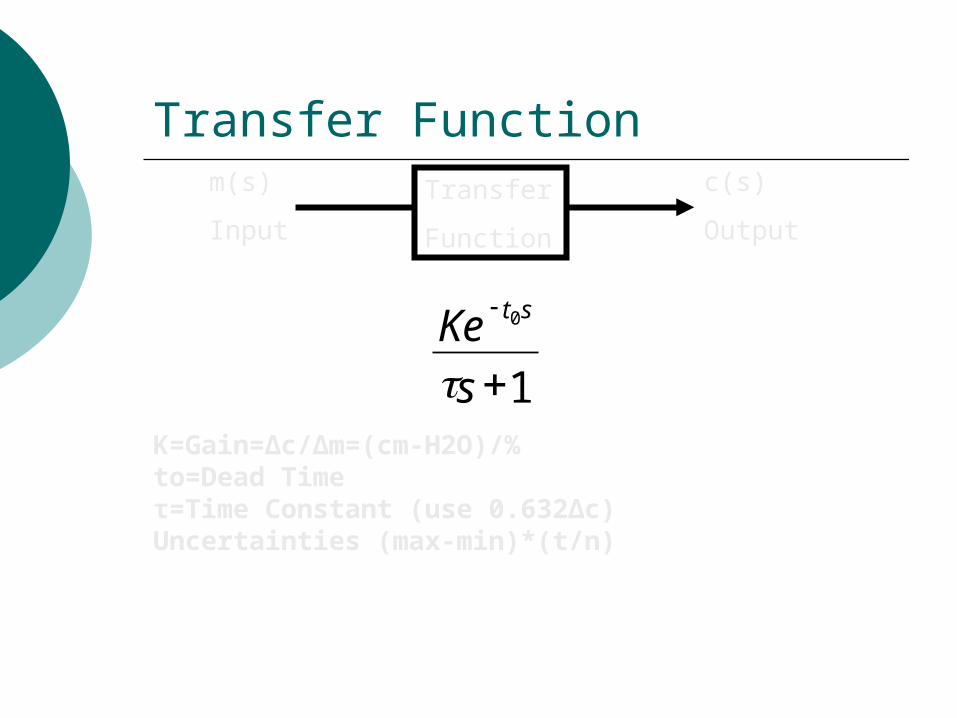
System Transfer FunctionSystem Transfer Function G(s) = G(s) = Ke /Ke /ττs+1s+1
– ParametersParameters
tt00=Dead Time=Dead Time
K = System GainK = System Gain
ττ = Time Constant = Time Constant
-t0s
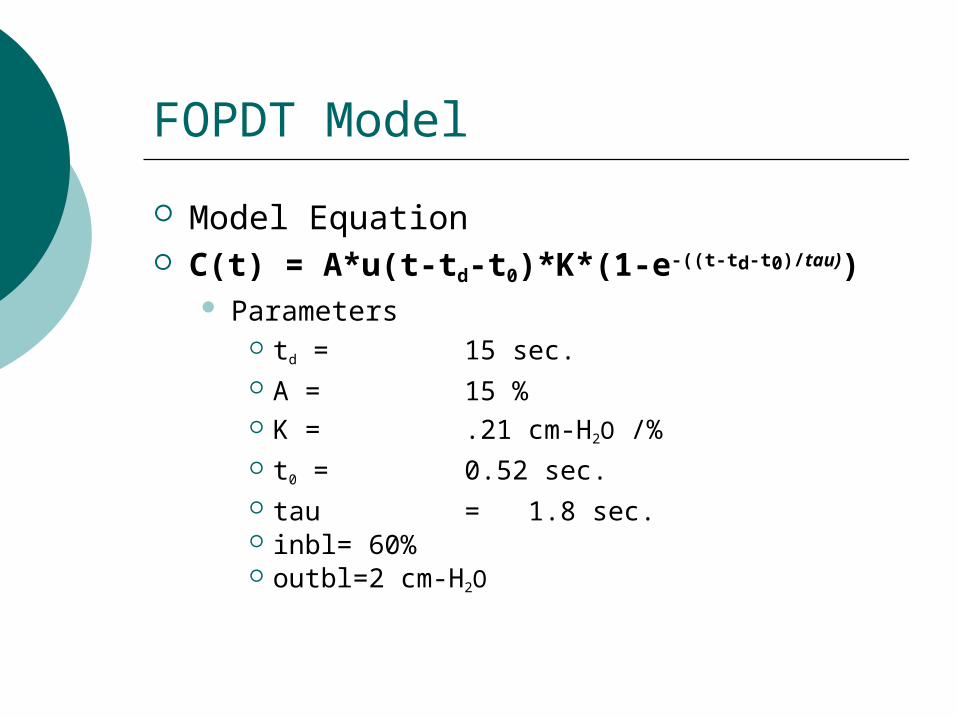
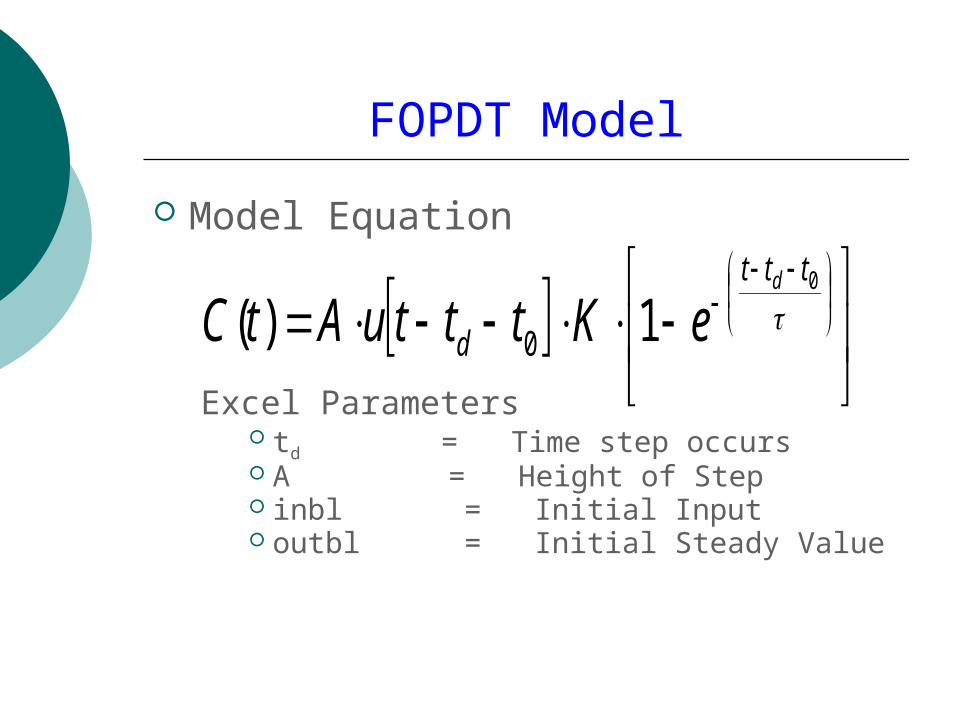
FOPDT ModelFOPDT Model
Model Equation in Time DomainModel Equation in Time Domain– C(t) = A*u(t-tC(t) = A*u(t-tdd-t-t00)*K*(1-e ))*K*(1-e )-(t-td-t0)
0
100
200
300
400
500
600
700
800
0 2 4 6 8 10
Time (s)
Ou
tpu
t (R
PM
)
0
6
12
18
24
30
36
42
48
Inp
ut
(%)
Model Output
Real Output
Model Input
Real Input
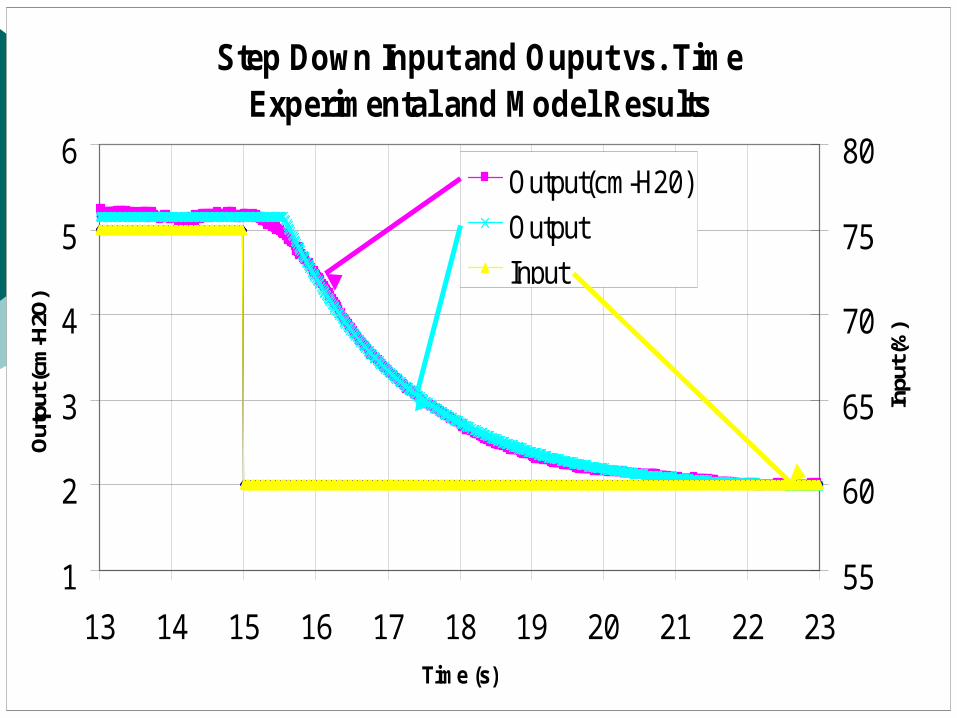
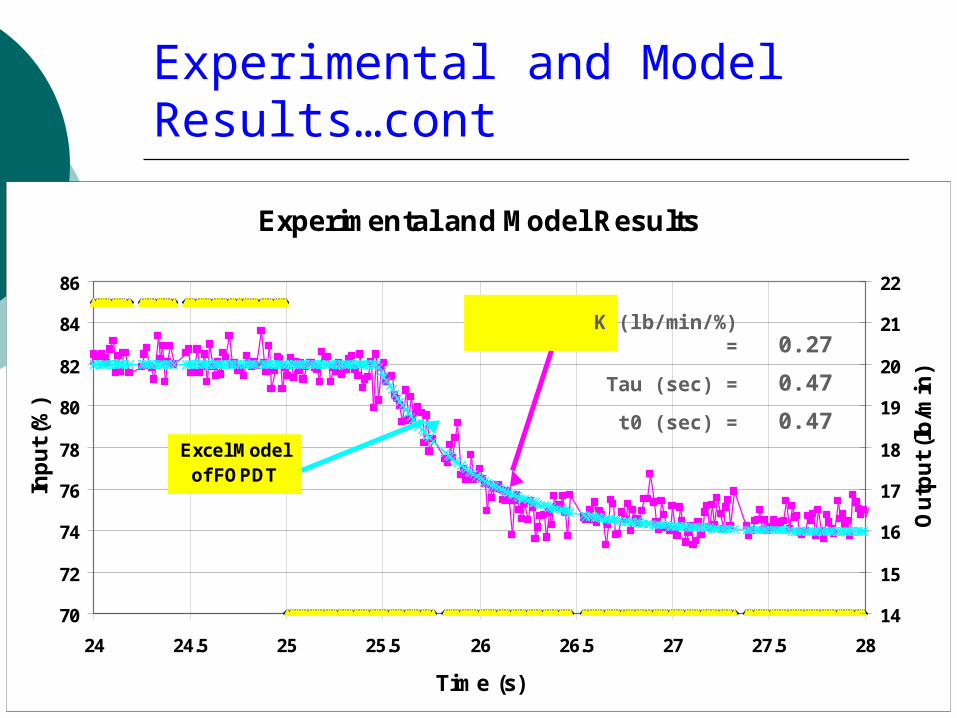
ResultsResults
0
100
200
300
400
500
600
700
800
4.5 5 5.5 6 6.5
Time (s)
Ou
tpu
t (R
PM
)
0
6
12
18
24
30
36
42
48
Inp
ut
(%)
Model Output
Real Output
Model Input
Real Input
Time Response (Gain)Time Response (Gain)
Gain (RPM/%)
02468
101214161820
Low Mid High
Time Response (Dead Time)Time Response (Dead Time)
Dead Time (s)
0
0.02
0.04
0.06
0.08
0.1
0.12
Low Mid High
Time Response (Time Constant)Time Response (Time Constant)




























































![[SCI] LSC Green Team Report - Green Campus](https://static.documents.pub/doc/80x56/577dab8a1a28ab223f8c9055/sci-lsc-green-team-report-green-campus.jpg)




