2. Contents of Write/Read ................................................................................. 2-1
3. Communication ............................................................................................. 3-1 3.1 Wirite ...................................................................................................................... 3-1
3.2 D Register Configuration ...................................................................................... 3-1
3.3 Ladder Communication Configuration ................................................................ 3-2
3.4 Command Format ................................................................................................. 3-2
3.5 Read of Parameter from CX .................................................................................. 3-3
3.6 Write of Parameter from PLC ................................................................................ 3-4
4. Ladder Communication with MELSEC ......................................................... 4-1 4.1 Communication Procedure .................................................................................. 4-1
4.4 Sample Program ................................................................................................... 4-5
5. Ladder Communication with FA-M3 ............................................................. 5-1 5.1 Communication Procedure .................................................................................. 5-1
1.1 OverviewWith Ladder communication of CX1000/CX2000, CX can communicate with PLC such as FA-M3, YOKOGAWA, and MELSEC, MITSUBISHI. It is possible to write/read CX data and giveversatile command to PLC.
It is necessary to have communication port (RS-422/485 or RS-232C) and Ladder communica-tion as option. Also, it is necessary to have communication module (F3RZ91-ON) for FA-M3and computer link unit (no handshaking mode) for MELSEC.
PLC
F0101.EPS
1.2 Benefit– The analog data can be transferred to PLC register.
– The parameters such as SP (set point) and PID of CX can be changed from PLC.
– Versatile control can be used with the ladder sequence.
Blank Page
<Toc> <Ind> <2. Contents of Write/Read> 2-1
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
2. Contents of Write/Read
■ Parameters of Write/Read
– Communication registers data
– Memory start/stop
– Alarm ACK, Math START/STOP
– Record of Manual trigger/Manual sample/Snap shot/Display data/Event data
– Write massage
– Return to operation display
– Alarm setting point of measurement/Math channels
– Parameters for each loops
– Parameters for each loop PID
– Alarm setting points for each control loops
– Program operation parameters
■ Parameters of Read
– Measuring data
– Alarm status of measuring data
– Math data
– Alarm status of Math data
– Control data
– Alarm status of control data
– Time
Blank Page
<Toc> <Ind> <3. Communication> 3-1
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
3. Communication
3.1 Wiring
SDA(+)
SDB(–)
RDA(+)
RDB(–)
SG
SHIELD
SDB
SDA
RDB
RDA
SG
FG FG
SDB
SDA
RDB
RDB
SG
CX CX
F0301.EPS
TerminatorMore than 120 ohm, 1/2W
PLC communicationmodule
Note: The plus/minus polarity of transmission/reception is opposite for some models.
3.2 D Register ConfigurationAll process data and setting parameters of CX are assigned to “D” registers. After D registersnumber of CX are specified, the data is written/read in the ladder program.
CX
F0302.EPS
D Resister No.
D5001
D5002
D5003
D5004
D5005
D5006
–
–
–
–
Desctiption
CH1 PV
CH2 PV
CH3 PV
CH4 PV
CH5 PV
CH6 PV
–
–
–
–
CX D Resister Map (Part)
3-2<Toc> <Ind> <3. Communication>
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
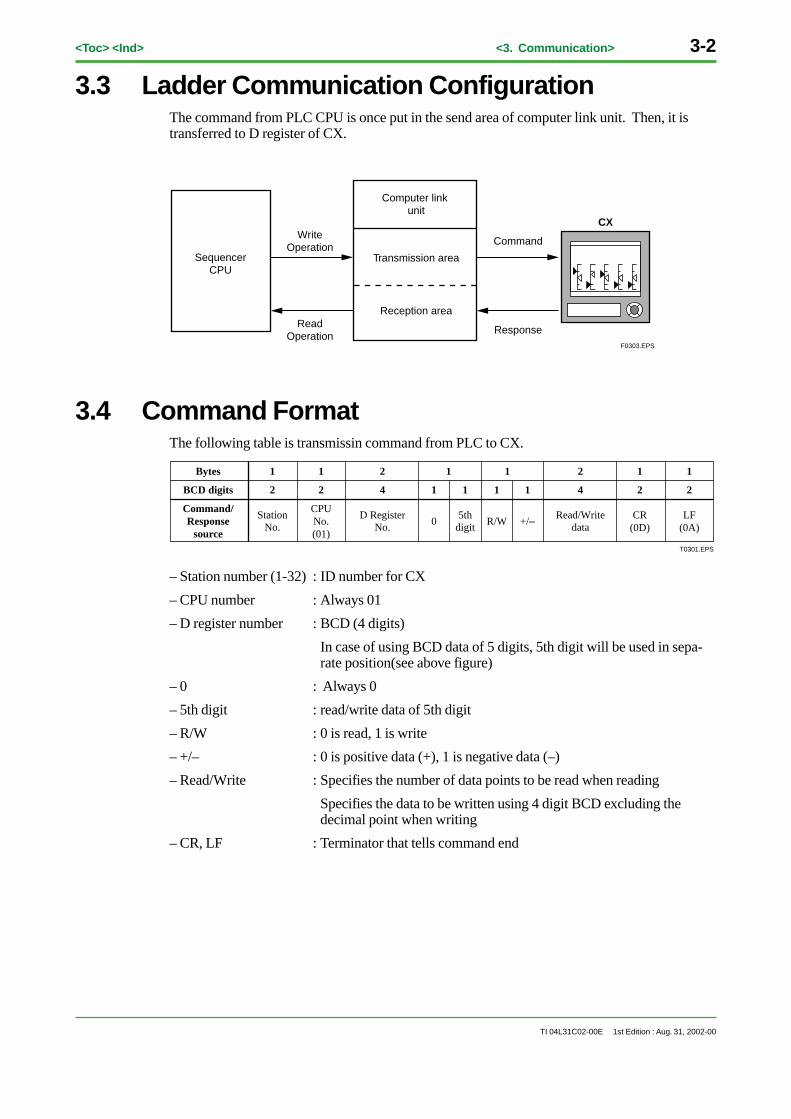
3.3 Ladder Communication ConfigurationThe command from PLC CPU is once put in the send area of computer link unit. Then, it istransferred to D register of CX.
CX
F0303.EPS
SequencerCPU
Computer link unit
Transmission area
Reception area
WriteOperation
ReadOperation
Command
Response
3.4 Command FormatThe following table is transmissin command from PLC to CX.
T0301.EPS
Bytes
BCD digits
Command/Response
source
1
2
StationNo.
1
2
CPUNo.(01)
2
4
D RegisterNo.
1
1
0
1
5thdigit
1
1
R/W
1
+/–
1
2
CR(0D)
1
2
LF(0A)
2
4
Read/Writedata
– Station number (1-32) : ID number for CX
– CPU number : Always 01
– D register number : BCD (4 digits)
In case of using BCD data of 5 digits, 5th digit will be used in sepa-rate position(see above figure)
– 0 : Always 0
– 5th digit : read/write data of 5th digit
– R/W : 0 is read, 1 is write
– +/– : 0 is positive data (+), 1 is negative data (–)
– Read/Write : Specifies the number of data points to be read when reading
Specifies the data to be written using 4 digit BCD excluding thedecimal point when writing
– CR, LF : Terminator that tells command end
<Toc> <Ind> <3. Communication> 3-3
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
3.5 Read of Parameter from CXThe construction of read parameter from CX
Command from PLC
T0302.EPS
Bytes
BCD digits
Command
1
2
StationNo.
1
2
CPUNo.(01)
2
4
D RegisterNo.
1
1
0
1
0
1
1
0
1
0
1
2
CR(0D)
1
2
LF(0A)
2
4
Datanumber of
read
CX response
T0303.EPS
Bytes
BCD digits
Command
1
2
StationNo.
1
2
CPUNo.(01)
2
4
D RegisterNo.
1
1
0
1
5thdigit
1
1
0
1
+/–
1
1
0
1
5thdigit
1
1
0
1
+/–
2
4
Data 1
2
4
Data 2
1
1
0
1
5thdigit
1
1
0
1
+/–
1
2
CR(0D)
...
...
...
1
2
LF(0A)
2
4
Data n
Examples of reading third channel communication register data (D register 0003) in stationnumber 01
Command 01010003000000010D0A
Response will be returned from CX as 200 (BCD)
Response 01010003000002000D0A
3-4<Toc> <Ind> <3. Communication>
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
3.6 Write of Parameter from PLCWrite from host(computer)
Command from host(computer)
T0304.EPS
Bytes
BCD digits
Command
1
2
StationNo.
1
2
CPUNo.(01)
2
4
D RegisterNo.
1
1
0
1
5thdigit
1
1
1
1
+/–
1
2
CR(0D)
1
2
LF(0A)
2
4
dddd
Response from CX
T0305.EPS
Bytes
BCD digits
Command
1
2
StationNo.
1
2
CPUNo.(01)
2
4
D RegisterNo.
1
1
0
1
5thdigit
1
1
1
1
+/–
1
2
CR(0D)
1
2
LF(0A)
2
4
dddd
Example of writing data 200 (00C8 (hex)) to the first target set point (D register1101)
Command 01011101001002000D0A
The below response will be returned from CX
Response 01011101001002000D0A
In CX writing, reception command is returned as response. To understand if it is written cor-rectly, please check the value by reading register.
<Toc> <Ind> <4. Ladder Communication with MELSEC> 4-1
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
4 Ladder Communication with MELSEC
4.1 Communication ProcedureExample of reading 4 measured data CH1 - CH4
0 1 2 ←Slot No.
DI CompLinkunit
CPU
MELSEC
CX
F0401.EPS
D register No.
D5001
D5002
D5003
D5004
D5005
D5006
–
–
–
–
Description
CH1 PV
CH2 PV
CH3 PV
CH4 PV
CH5 PV
CH6 PV
–
–
–
–
D register (part)
Address 1
4.2 Transmission
F0402.EPS
(1)
(3)
(5)
(8)
(1)
(2)
(4)
(6)
(7)
(9)
(3)
(4)
(7)
(6)
(2)
(5)
(9)
(8)
Read or write instruction is transferred from PLC CPU to buffer for transmission of computer link unit.
Turn request to transmit ON, the command is sent to CX.
After sending, transmission completionreturns and request to transmit turns OFF.
CX returns response in acceptance ofCommand.The data is once kept in buffer for receiving at computer link unit.
After receiving from CX, request toread turns ON and FROM instruction is executed (FROM instruction transfers data of computer link unit to D register.)
After transmission, read completion signal turns ON, and reception of read signal turns OFF.
PLCCPU
TO instructiontransmission data
Request to transmit
ON
Transmission Completion
Request to transmit
OFF
Request to read ON
FROM instruction
data read
Read completion
signal
Command
Response
ComputerLink unit
CX
4-2<Toc> <Ind> <4. Ladder Communication with MELSEC>
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
Read/write transmission instruction from PLC is done by following procedure
(1) The transmission data is transferred from sequencer CPU to transmission area of computerlink unit by TO instruction.
(2) Request to transmission is sent from sequencer CPU to computer link unit.
(3) Transmission data that is written in transmission area of computer link unit is output toCX.
(4) After transmission completion, the transmission completion flag of computer link unitturns ON.
(5) Turn the request to transmit OFF.
F0403.EPS
(1)
Register in PLC CPUTransmission area of computer link unit
AddressD0
D1
D2
D3
D4
D5
00H
01H
01H
00H
04H
0AH
05H
01H
50H
00H
00H
0DH
Address0H
1H
2H
3H
4H
5H
00H
01H
01H
00H
04H
0AH
05H
01H
50H
00H
00H
0DH
Transmission data number
Send data
TO instruction
Character number of transmission data (in sending ,5)Always 01CX address
CX header of readD register number of inside of data or write data ( byte upside down)
for reading 0000, for writing 1000
terminator
read data number or write data (byte upside down )
F0404.EPS
(2)
(4)
(5)
(3)01 01 50 01 00 00 00 04 0D 0A
CR LF
Address,CPU No. (Always to 1)
Header number of D register/write data Read instruction (0000)Write instruction (0010)
In reading, read numberIn writing, write data
Terminator
Request to transmit Y27
Transmission completion X27
<Toc> <Ind> <4. Ladder Communication with MELSEC> 4-3
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
4.3 Reception Reception procedure is followed by (6)-(9)
(6) Computer link unit receives CX response, keeps data in butter for reception area.
(7) In receiving terminator (CR LF), Reception read flag at computer link unit turns ON.
(8) PLC CPU read reception data at computer link unit by FROM instruction
(9) Read completion signal of reception data is sent.
F0405.EPS
(7)
(9)
(8)
01 01 50 01 00 00
CH1 CH2 CH3 CH4
10 00 00 01 00 50 00 00 02 00 00 00 00 12 CR LF
0B
Address, CPU number
D register header number
Terminator
Return data from CXReception dataRequest to read X2A
Reception dataRead completion Y28 Data uptake
FROM instruction
4-4<Toc> <Ind> <4. Ladder Communication with MELSEC>
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
(8)
80H
81H
82H
83H
84H
85H
86H
87H
88H
89H
8AH
8BH
00H
01H
01H
00H
00H
01H
50H
00H
00H
01H
12H
0AH
0BH
01H
50H
00H
10H
00H
00H
00H
02H
00H
00H
0DH
D4997
D4998
D4999
D5000
D5001
D5002
D5003
D5004
D5005
D5006
D5007
D5008
00H
01H
01H
00H
00H
01H
50H
00H
00H
00H
12H
0AH
0BH
01H
50H
00H
10H
00H
00H
00H
02H
00H
00H
0DH
F0406.EPS
Address
Reception area of computer link area
FROMinstruction
Code bit 1 : –0 : +
Address
Register in PLC CPU
Character number of reception data is(read data x 2 + 3)
Address
CX read header D register number or write data D5001
CH1 PV (D5001)
CH2 PV (D5002) –5.0°C
CH3 PV (D5003) +20.0°C
CH4 PV (D5004) +1.2%
Byte dataup side down
<Toc> <Ind> <4. Ladder Communication with MELSEC> 4-5
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
4.4 Sample Program
• Transmission interval processing
C0
SM1038
4Intervalcounter
Intervalcounter
<Reset counter>
RST C0
On for 1 scanonly after RUN
= K1 C0 50Intervalcounter
TX flag 1
<If counter is 1, turn ON M601 for 1 cycle>
PLS M601
K4
= K2 C0 71Intervalcounter
TX flag 2
<If counter is 2, turn ON M602 for 1 cycle>
PLS M602
= K3 C0 92Intervalcounter
TX flag 3
<If counter is 3, turn ON M603 for 1 cycle>
PLS M603
SM1031
200-ms timer
27Intervalcounter
<Increment every 0.2 s>
C0
4-6<Toc> <Ind> <4. Ladder Communication with MELSEC>
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
• Read command transmission processing: If M601 is ON, send a commandto lead CH1 to 4.
M601 X27 Y27113 MOVP H5 D0
MOVP H102 D1
MOVP H5001 D2
MOVP H4 D4
MOVP H0A0D D5
Tx flag 1 Tx end Tx request
<Set CPU NO. “1” and station address No. 2>
D registerFirst No.
D registerFirst No.
CPU address
Num. of Tx data
<Specify first call register No. 5001 of the CX>
<Recall 4 words from the first D register No.>
Read/write
Num. of data to be read/write data
Num. of data to be read/write data
<Specify read execute. Send “1”>
MOVP H0 D3
Terminator
<Attach terminator>
<Swap the upper and lower bytes of D2>
SWAPP D2
<Swap the upper and lower bytes of D2>
SWAPP D4
<Declare num. of Tx data to be 5>
Num. of Tx data
TOP H2 H800 D0 K6
<Transfer the contents of D0 to D5 to the Tx buffer>
SET Y27Tx request
Tx request
<Set Tx request>
X27323 RST Y27
Tx end
<Reset Tx request when Tx end>
<Toc> <Ind> <4. Ladder Communication with MELSEC> 4-7
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
• Reception processing: Receive data of CH1 to 4.
X2A341 FROMP H2 H0A00 D100 K1
FROMP H2 H0A01 D101 K0Z0
MOVP D100 Z0
Readrequestflag
CPU No.address
Rx readend
Data size
Data size
<Send data size of data starting with D101>
First D registerNo.
5th digit and signinformation of CH1
CH1 data
SWAPP D101
SWAPP D102
Y28
<Swap the upper and lower bytes of D101>
<Swap the upper and lower bytes of D102>
SWAPP D103
SWAPP D104
<Swap the upper and lower bytes of D103>
<Swap the upper and lower bytes of D104>
<Send the data size to D100>
<Send the data size to Z0>
= K1 C0 Intervalcounter
5th digit and signinformation of CH3
5th digit and signinformation of CH2
CH2 data
CH3 data
SWAPP D105
SWAPP D106
<Swap the upper and lower bytes of D105>
<Swap the upper and lower bytes of D106>
SWAPP D107
SWAPP D108
<Swap the upper and lower bytes of D107>
5th digit and signinformation of CH4
SWAPP D109
<Swap the upper and lower bytes of D109>
CH4 data
SWAPP D110
<Swap the upper and lower bytes of D110>
CJ P124
<Jump to P124>
<Swap the upper and lower bytes of D108>
4-8<Toc> <Ind> <4. Ladder Communication with MELSEC>
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
• Write processing: If M602 is set, write the CH1 data to communicationregister C1.
M602 X27 Y27627 MOVP H5 D0
MOVP H102 D1
MOVP H1 D2
MOVP D104 D4
Tx flag 2 Tx end Tx request
<Set CPU NO. “1” and station address No.>
D registerFirst No.
D registerFirst No.
CPU address
Num. of Tx data
<Specify first call register No. 0001 of the CX>
Read/write
Read/write
Specify CH1 Num. of datato be read/write data
Num. of datato be read/write data
<Specify write execute. Send “10”>
MOVP H10 D3
<Swap the upper and lower bytes of D2>
SWAPP D2
<Send CH1 data to write data>
SWAPP D3
SWAPP D4
<Declare num. of Tx data to be 5>
<Swap the upper and lower bytes of D4>
MOVP H0A0D D5
Num. of Tx data
Terminator
TOP H2 H800 D0 K6
<Transfer the contents of D0 to D5 to the Tx buffer>
SET Y27Tx request
Tx request
Rx processing of response received from the CX
<Set Tx request>
X27822 RST Y27
Tx end
<Reset Tx request when Tx end>
X2A840 FROMP H2 H0A00 D130 K1
FROMP H2 H0A01 D131 K0Z0
MOVP H100 Z0Readrequestflag
Rx readend
Data size
CJ P124
Y28
= K2 CO Intervalcounter
<Toc> <Ind> <4. Ladder Communication with MELSEC> 4-9
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
• Read command transmission processing: If M603 is ON, send a commandto lead CH5 to 8.
M603 X27 Y27866 MOVP H5 D0
MOVP H102 D1
MOVP H5005 D2
MOVP H4 D4
MOVP H0A0D D5
Tx flag 3 Tx end Tx request
<Set CPU NO. “1” and station address No.>
D registerFirst No.
D registerFirst No.
CPU address
Num. of Tx data
<Specify first call register No. 5005 of the CX>
<Recall 4 words from the first D register No.>
Read/write
Num. of data to be read/write data
Num. of data to be read/write data
<Specify read execute. Send “0”>
MOVP H0 D3
Terminator
<Swap the upper and lower bytes of D2>
SWAPP D2
<Swap the upper and lower bytes of D4>
SWAPP D4
<Declare num. of Tx data to be 5>
Num. of Tx data
TOP H2 H800 D0 K6
<Transfer the contents of D0 to D5 to the Tx buffer>
SET Y27
Tx request
Tx request
<Set Tx request>
X271066 RST Y27
Tx end
<Reset Tx request when Tx end>
4-10<Toc> <Ind> <4. Ladder Communication with MELSEC>
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
• Reception processing: Receive the data of CH5 to CH8.
X2A1084 FROMP H2 H0A00 D200 K1
FROMP H2 H0A01 D201 K0Z0
MOVP D200 Z0
Readrequestflag
CPU No.address
Rx readend
Data size
Data size
<Send data size of data starting with D201>
First D register
5th digit and signinformation of CH5
CH5 data
SWAPP D201
SWAPP D202
Y28
<Swap the upper and lower bytes of D201>
<Swap the upper and lower bytes of D202>
SWAPP D203
SWAPP D204
<Swap the upper and lower bytes of D203>
5th digit and signinformation of CH6
SWAPP D205
<Swap the upper and lower bytes of D205>
<Swap the upper and lower bytes of D204>
<Send the data size to D200>
<Send the data size to Z0>
= K3 C0 Intervalcounter
1372
1371
P124
END
CH7 data
5th digit and signinformation of CH7
CH6 data
5th digit and signinformation of CH8
SWAPP D206
SWAPP D207
<Swap the upper and lower bytes of D206>
<Swap the upper and lower bytes of D207>
SWAPP D208
SWAPP D209
<Swap the upper and lower bytes of D208>
CH8 data
SWAPP D210
<Swap the upper and lower bytes of D210>
CJ P124
<Jump to P124>
<Swap the upper and lower bytes of D209>
<Toc> <Ind> <5. Ladder Communication with FA-M3> 5-1
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
5. Ladder Communication with FA-M3
5.1 Communication Procedure0 1 2 ←Slot No.
F0501.EPS
D register No.
D5001
D5002
D5003
D5004
D5005
D5006
–
–
–
–
Description
CH1 PV
CH2 PV
CH3 PV
CH4 PV
CH5 PV
CH6 PV
–
–
–
–
Digital control D register map (part)
CX
Laddercommunication
module
FA-M3
Address 1
F0502.EPS
(1)
(3)
(5)
(8)
(1)
(2)
(4)
(6)
(7)
(9)
(3)
(4)
(7)
(6)
(2)
(5)
(8)
(9)
Read or Write command is transferred to output module of ladder communication by PLC WRITE command.
Request to transmit signal turns ON, instruction is sent to CX.
After transmission completion,transmission completion signal turns ON and request to transmit signal turns OFF.
CX returns responses, and keeps it once in receiving buffer of computer link unit.
After receiving from CX,reception relay signal turns ON and READ instruction is executed. Data of link units is transferred to register D.
After completing transfer, read relay signal turn ON. Reception signal turns OFF and read relay turns OFF
PLCCPU
CX
Write instruction
Transmission start
relay ON
Transmission completion
Relay ON
Transmission start
relay OFF
Reception relay OFF
Read instruction
data uptake
Read completion
relay
Ladder Communication Module
Command
Response
5-2<Toc> <Ind> <5. Ladder Communication with FA-M3>
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
5.2 TransmissionTransmission procedure of read/write command is followed by (1)-(5)
(1) Transmission data is transmitted from sequencer CPU to transmission area of computerlink unit by WRITE instruction.
(2) Request to transmit signal is output to computer link unit.
(3) Transmission data that is put in computer link unit is output to CX.
(4) After transmission, transmission completion flag of computer link unit turns ON.
(5) Request to transmit signal turns OFF.
F0503.EPS
D0
D1
D2
D3
D4
D5
00H
01H
50H
00H
00H
0DH
10H
01H
01H
00H
04H
0AH
301
302
303
304
305
306
00H
01H
50H
00H
00H
0DH
10H
01H
01H
00H
04H
0AH
(1)
Register in PLC CPU
Address AddressCharacter number of transmission data(In transmitting: 10 )
CX addressalways 01
CX read header D register number of internal data or write data
read: 0000, write: 1000
Read data number or write data
Terminator(0DH→CR, 0AH→LF)
Number ofsend data
WRITEinstruction
Transmission data
F0504.EPS
(2)
(4)
(5)
(3)01 01 50 01 00 00 00 04 0D 0A
CR LF
Address (1-32)CPU No( always 1)
D register header number/write dataread command (0000)write command (0010)
In reading: read number (10: 0010)In writing: write data
Terminator
Request to transmitY 00x34
Transmission completion
X 00x02 X is slot number of ladder communication module.
<Toc> <Ind> <5. Ladder Communication with FA-M3> 5-3
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
5.3 ReceptionReception procedure is followed by (6)-(9).
(6) Ladder communication module receives CX response, and keeps data in reception area.
(7) After receiving terminator (CR LF), read reception flag of ladder communication moduleturns ON.
(8) PLC CPU reads reception data by READ instruction.
(9) Reception data of read completion signal is output.
F0505.EPS
(7)
(9)
(8)
01 01 50 01 00 00
CH1 CH2 CH3 CH4
10 00 00 01 00 50 00 00 02 00 00 00 00 12 CR LF
0B
Address, CPU No.
D register header No.
Terminator
Return data from CX
Receptioncompletion relay
X00x01
Read completionrelay
Y00x33
READ instructiondata uptake
5-4<Toc> <Ind> <5. Ladder Communication with FA-M3>
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
(8)
Headeraddress
Ladder communication moduleinput register (reception buffer)
READinstruction
Code bit 1 : –0 : +
Address
Register in PLC CPU
CH1 PV (D5001)
CH2 PV (D5002) –5.0°C
CH3 PV (D5003) +5.0°C
CH4 PV (D5004) +1.2%
1
2
3
4
5
6
7
8
9
10
11
12
13
00H
00H
01H
50H
00H
00H
00H
00H
00H
02H
00H
00H
0DH
00H
0BH
01H
01H
00H
10H
01H
50H
00H
00H
00H
12H
0AH
D400
D401
D402
D403
D404
D405
D406
D407
D408
D409
D410
D411
D412
00H
00H
01H
50H
00H
00H
00H
00H
00H
02H
00H
00H
0DH
00H
0BH
01H
01H
00H
10H
01H
50H
00H
00H
00H
12H
0AHF0506.EPS
Status (normal reception condition : 0000H)
CX address CX read header
D register No. or write data D5001
<Toc> <Ind> <5. Ladder Communication with FA-M3> 5-5
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
5.4 Sample Program
(0001)
(0002)
(0004)
(0005)
(0003)00001N
CX2000 FA-M3 ladder communications sample program
Start communication settings
Read data
Enable IO
This program is for the case when the ladder communication module isinstalled in the 3rd slot.
M00035DIFD I00100
SET I00401
RST I00402
5-6<Toc> <Ind> <5. Ladder Communication with FA-M3>
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
(0006)
(0007)
(0009)
(0010)
(0008)00008N
Set the communication mode
Character code = 8
Stop bit = 1
Parity bit = EVEN
Char = 8, stop bit = 1 bit, parity = even, 9600 bps, master station
100100
X00303
MOV D00101
MOV
MOV
MOV
MOV
MOV
MOV
D00102
(0011) 9600 bpsD00104
(0012) Master station
Master station
D00105
(0013)D00106
(0014) Communication modewrite command
D00100
(0015) Write communicationmode
3 1
(0016) Write communicationspecifications
3 6
(0017) Write executecommand
Y00335
(0018) Reset communicationsI00100
(0019)00031N
Write commandRESET
RESET
Y00335
D00103
1
0
7
0
1
1
601
604
WRITE
WRITE
D00100
D00101
SET
RST
RST
2
<Toc> <Ind> <5. Ladder Communication with FA-M3> 5-7
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
(0020)
(0022)
(0021)00033N Read measurement
input
IO in execution
Process for alternating data read and data write operations
X00303 I00401 I00402
I00201
CNT
I00402
(0024)
IO end
Counter
I00402
2
(0027)
Read next1 I00401
(0031)
DIFD
SET
RST
C00001
SETC00001 =
(0023)00040N
(0025)00047N
(0026)00049N
Write to communicationregister
IO in execution
X00303 I00401 I00402
I00301
I00402
DIFD
SET
X00301
I00402
I00403
I00403RST
RST
(0028)00052N
(0029)00054N
(0030)00056N
I00403
Write next0 I00401C00001 =
Reset counterI00403SET
5-8<Toc> <Ind> <5. Ladder Communication with FA-M3>
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
(0032)
(0034)
(0033)00061N Number of transmitted
characters = 10
STN = 01, CPU = 01
Read data of CX2000 communication input channels 1 to 4
(0035)
(0036)
(0037)
(0038)
(0039)
(0040)
(0041)
100201
X00302
X00301
X00301
I00401
D00201MOV 10
D00202MOV
MOV
MOV
MOV
MOV
$101
$5001
$0
$4
$DOA
D00203
D00204
D00205
D00206
63 301WRITE D00201
1READ 3
Y00334SET
I00201RST
Measurement inputregister number
Read
Number of registers = 4
Terminator
Write to transmissionbuffer
Transmission commandrelay
Reset command transmission FLAG
RESET transmissioncommand relay
Y00334RST(0042)
00080N
Retrieve responsedata
34D00221(0043)
00082N
Y00333SET(0044)
RESETread end relay
Read end relay
Y00333RST(0045)
00088N
<Toc> <Ind> <5. Ladder Communication with FA-M3> 5-9
TI 04L31C02-00E 1st Edition : Aug. 31, 2002-00
(0046)
(0048)
(0047)00090N Number of transmitted
characters = 10 byte
Write destination = 01
Command = Write
Transmission destinationSTN = 01, CPU = 01
Write data to the CX2000 communication register C01
Communication register dataAll control loops start/stop
Memory start/stop
Alarm ACK
Math Start/Stop
Manual trigger/Manual sample/ snap shot/store display data to medium/sore event data to medium
Write messageReturn to operation screenAlarm setting of Measured channel 1(Alarm No.1)Alarm setting of Measurement channel 1(Alarm No. 2)Alarm setting of Measurement channel 1 (Alarm No. 3)Alarm setting of Measurement channel 1 (Alarm No. 4)Alarm setting of measurement channel 20(Alarm No. 1)Alarm setting of measurement channel 20(Alarm No. 2)Alarm setting of measurement channel 20(Alarm No. 3)Alarm setting of measurement channel 20 (Alarm No. 4)Alarm setting of Math channel 1Upper 5 digit of alarm No. 1Alarm setting of Math channel 1Lower 5 digit of alarm No. 1Alarm setting of Math channel 1Upper 5 digit of alarm No. 2Alarm setting of Math channel 1Lower 5 digit of alarm No. 2Alarm setting of Math channel 1 Upper 5 digit of alarm No. 3Alarm setting of Math channel 1 Lower 5 digit of alarm No. 3Alarm setting of Math channel 1Upper 5 digit of alarm No. 4Alarm setting of Math channel 1 Lower 5 digit of alarm No. 4Alarm setting of Math channel 60Upper 5 digit of alarm No. 1Alarm setting of Math channel 60Lower 5 digit of alarm No. 1
Setting value
–32768-327670 : Stop1 : Start0 : memory stop1 : memory startIn Write0 : Alarm ACK In Read0 : Alarm light out1 : Alarm light2 : Alarm blink0 : Math stop1 : Math start2 : Math reset 0 : Manual sample1 : Manual trigger2 : snap shot3 : store display data to medium4 : sore event data to medium1-8 : Message number0: Return to operation screenValue within Measurement range, no decimal point
Value within Measurement range, no decimal point
Value within Measurement range, no decimal point
Value within Measurement range, no decimal point
Value within Measurement range, no decimal point
Value within Measurement range, no decimal point
Value within Measurement range, no decimal point
Value within Measurement range, no decimal point
For reading, value aligned upper 5 digits with lower 5 digits within Math channel span and no decimal point .For writing, setting is available in -99999-99999 and is written in either lower or upper register.
For reading, value aligned upper 5 digits with lower 5 digits within Math channel span and no decimal point .For writing, setting is available in -99999-99999 and is written in either lower or upper register.
For reading, value aligned upper 5 digits with lower 5 digits within Math channel span and no decimal point .For writing, setting is available in -99999-99999 and is written in either lower or upper register.
For reading, value aligned upper 5 digits with lower 5 digits within Math channel span and no decimal point .For writing, setting is available in -99999-99999 and is written in either lower or upper register.
For reading, value aligned upper 5 digits with lower 5 digits within Math channel span and no decimal point .For writing, setting is available in -99999-99999 and is written in either lower or upper register.
Alarm setting of Math channel 60Upper 5 digit of alarm No. 2Alarm setting of Math channel 60Lower 5 digit of alarm No. 2Alarm setting of Math channel 60Upper 5 digit of alarm No. 3Alarm setting of Math channel 60Lower 5 digit of alarm No. 3Alarm setting of Math channel 60Upper 5 digit of alarm No. 4Alarm setting of Math channel 60Lower 5 digit of alarm No. 4
Setting value
For reading, value aligned upper 5 digits with lower 5 digits within Math channel span and no decimal point .For writing, setting is available in -99999-99999 and is written in either lower or upper register.
For reading, value aligned upper 5 digits with lower 5 digits within Math channel span and no decimal point .For writing, setting is available in -99999-99999 and is written in either lower or upper register.
For reading, value aligned upper 5 digits with lower 5 digits within Math channel span and no decimal point .For writing, setting is available in -99999-99999 and is written in either lower or upper register.
Read/WriteR/W
R/W
R/W
R/W
R/W
R/W
Parameter of loop 1
AF02.EPS
D register No.
D1001
D1002
D1003
D1004
D1005
D1006
D1007
D1008
D1009
D1010
D1011
D1012
D1013D1014
D1015
D1016D1017D1018
Classification
Parameter for each loop
Description
Bias use or not, bias value, bias input kinds to PV1
Bias use or not, bias value, bias input kinds to PV2
Bias use or not, bias value, bias input kinds to remote SP
Filter input kinds, filter use or not, filter value to PV1
Filter input kinds, filter use or not, filter value to PV2
Filter input kinds, filter use or not, filter value to remote SP
With or without Ratio setting and ratio value
Anti-reset windup ON/OFF
Unit of ramp rate time unit
Target SP ascending ramp rate setting
Target SP descending ramp rate setting
Auto/Man/Cas switching in cascade operation
Target SP settingRun/Stop switching
Remote/local switching
Present use of PID No.Value of Manual OUTAutotuning status
Setting value
–100% - 100% of measurement input range span width : bias value(bias ON)–30001 - -32768,30001-32767 : bias use OFF–100% - 100% of measurement input range span width : bias value(bias ON)–30001 - –32768,30001-32767 : bias use OFF–100% - 100% of measurement input range span width : bias value(bias ON)–30001 - –32768,30001-32767 : bias use OFF0 1-120 : filter value (filter ON) –30001 - –32768,30001 - 32767 : Filter OFF0 1-120 : filter value (filter ON) –30001 - –32768,30001 - 32767 : Filter OFF0 1-120 : filter value (filter ON) –30001 - –32768,30001 - 32767 : Filter OFF1-9999 : ratio setting value (ratio setting ON)–30001 - –32768, 3000 - 32767 : ratio setting OFF0 : Anti-reset windup OFF1 : Anti-reset windup ON0 : Hour 2: Second 1 : MinuteFrom 1 value, Max. PV input range with no decimal point.–30001 - –32768,30001-32767 : Setting OFFFrom 1 value, Max. PV input range with no decimal point –30001 - –32768,30001-32767 : Setting OFF0 : Auto switching1 : Manual switching2 : Cascade switching1 - 8 : Target SP No.0 : Stop1 : Run0 : Local1 : Remote1-8 : PID No.–50 - 1050 : –5.0% - 105.0% 0 : not AT status 1: AT status
PID parameter for PID number 1 of loop 1Control alarm setting for PID number 2 of loop 1PID parameter for PID number 3 of loop 1Control alarm setting for PID number 3 of loop 1PID parameter for PID number 4 of loop 1Control alarm setting for PID number 4 of loop 1PID parameter for PID number 5 of loop 1Control alarm setting for PID number 5 of loop 1PID parameter for PID number 6 of loop 1Control alarm setting for PID number 6 of loop 1PID parameter for PID number 7 of loop 1Control alarm setting for PID number 7 of loop 1PID parameter for PID number 8 of loop 1Control alarm setting for PID number 8 of loop 1
Description
Set point (SP)
Proportion band (P) Integral time (I) Differential (D) Upper limit of outputLower limit of outputWith or without shutdown function
Manual resetHysteresis of setting value
action point of Hysteresis
Direct/reverse switching setting
Preset outputAlarm setting for control (alarm level 1)
Alarm setting for control (Alarm level 2)Alarm setting for control (Alarm level 3)Alarm setting for control (Alarm level 4)Same parameter as PID number 1 of loop 1
Same control alarm setting for PID number 1 of loop 1
Same parameter as PID number 1 of loop 1
Same control alarm setting for PID number 1 of loop 1
Same parameter as PID number 1 of loop 1
Same control alarm setting for PID number 1 of loop 1
Same parameter as PID number 1 of loop 1
Same control alarm setting for PID number 1 of loop 1
Same parameter as PID number 1 of loop 1
Same control alarm setting for PID number 1 of loop 1
Same parameter as PID number 1 of loop 1
Same control alarm setting for PID number 1 of loop 1
Same parameter as PID number 1 of loop 1
Same control alarm setting for PID number 1 of loop 1
Setting value
Value, within measurement input range, no decimal point 1 - 9999 : 0.1 - 999.9%0-60000-6000–50 - 1050 : –5.0% - 105.0%–50 - 1050 : –5.0% - 105.0%0 : OFF1 : ON–50 - 1050 : –5.0% - 105.0%Value, within measurement input range, no decimal point0 : OFF1 : Upper2 : Lower0 : Reverse1 : Direct–50-1050 : –5.0%-105.0%It depends on alarm kinds as follows.Measurement/setting alarm: Value, within measurement input range, no decimal pointDeviation alarm: value, no decimal point within EUS0.0-100.0% of measurement input range.Output alarm: –50-1050 : –5.0%-105.0%Same as aboveSame as aboveSame as aboveSame range as PID parameter for PID number 1 of loop 1
Same range as control alarm setting for PID number 1 of loop 1
Same range as PID parameter for PID number 1 of loop 1
Same range as control alarm setting for PID number 1 of loop 1
Same range as PID parameter for PID number 1 of loop 1
Same range as control alarm setting for PID number 1 of loop 1
Same range as PID parameter for PID number 1 of loop 1
Same range as control alarm setting for PID number 1 of loop 1
Same range as PID parameter for PID number 1 of loop 1
Same range as control alarm setting for PID number 1 of loop 1
Same range as PID parameter for PID number 1 of loop 1
Same range as control alarm setting for PID number 1 of loop 1
Same range as PID parameter for PID number 1 of loop 1
Same range as control alarm setting for PID number 1 of loop 1
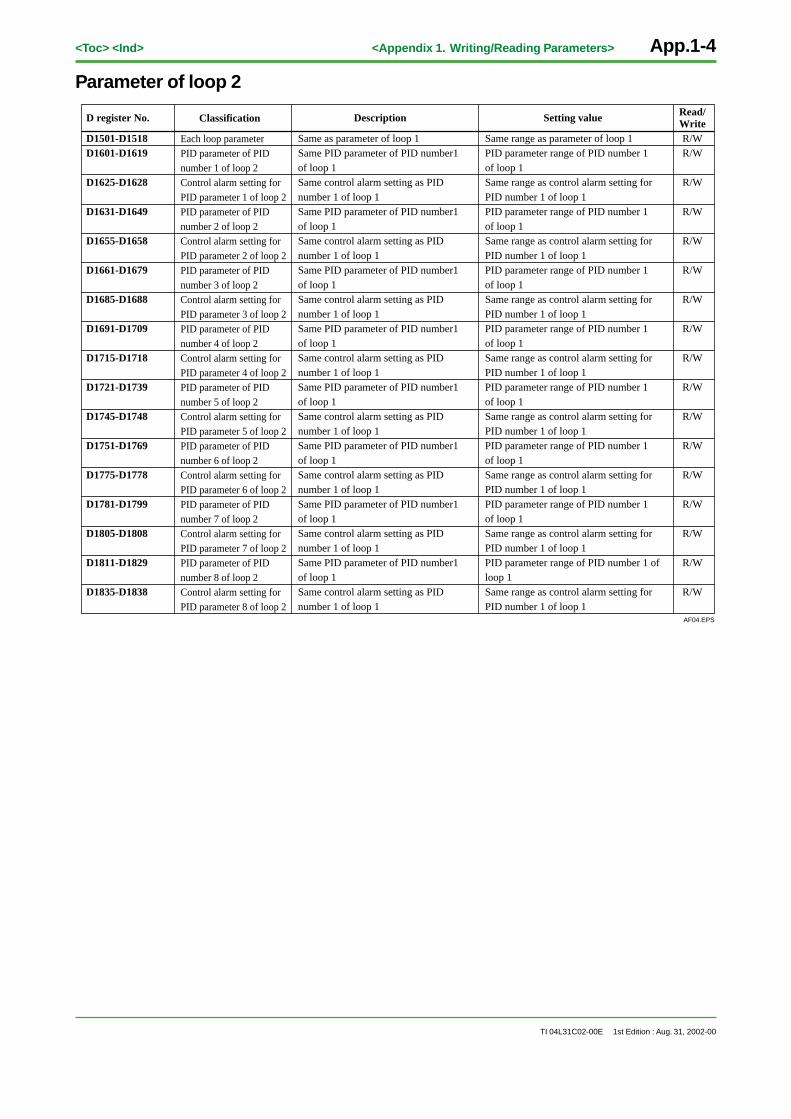
Each loop parameterPID parameter of PID number 1 of loop 2Control alarm setting for PID parameter 1 of loop 2PID parameter of PID number 2 of loop 2Control alarm setting for PID parameter 2 of loop 2PID parameter of PID number 3 of loop 2Control alarm setting for PID parameter 3 of loop 2PID parameter of PID number 4 of loop 2Control alarm setting for PID parameter 4 of loop 2PID parameter of PID number 5 of loop 2Control alarm setting for PID parameter 5 of loop 2PID parameter of PID number 6 of loop 2Control alarm setting for PID parameter 6 of loop 2PID parameter of PID number 7 of loop 2Control alarm setting for PID parameter 7 of loop 2PID parameter of PID number 8 of loop 2Control alarm setting for PID parameter 8 of loop 2
Setting value
Same range as parameter of loop 1PID parameter range of PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1PID parameter range of PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1PID parameter range of PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1PID parameter range of PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1PID parameter range of PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1PID parameter range of PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1PID parameter range of PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1PID parameter range of PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1
Read/WriteR/WR/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
Description
Same as parameter of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1
Each loop parameterPID parameter of PID number 1 of loop 3Control alarm setting for PID parameter 1 of loop 3PID parameter of PID number 2 of loop 3Control alarm setting for PID parameter 2 of loop 3PID parameter of PID number 3 of loop 3Control alarm setting for PID parameter 3 of loop 3PID parameter of PID number 4 of loop 3Control alarm setting for PID parameter 4 of loop 3PID parameter of PID number 5 of loop 3Control alarm setting for PID parameter 5 of loop 3PID parameter of PID number 6 of loop 3Control alarm setting for PID parameter 6 of loop 3PID parameter of PID number 7 of loop 3Control alarm setting for PID parameter 7 of loop 3PID parameter of PID number 8 of loop 3Control alarm setting for PID parameter 8 of loop 3
Setting value
Same range as parameter of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1
Read/WriteR/WR/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
Description
Same parameter as loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1
Parameter for each loopsPID parameter of PID number 1 of loop 4Control alarm setting for PID parameter 1 of loop 4PID parameter of PID number 2 of loop 4Control alarm setting for PID parameter 2 of loop 4PID parameter of PID number 3 of loop 4Control alarm setting for PID parameter 3 of loop 4PID parameter of PID number 4 of loop 4Control alarm setting for PID parameter 4 of loop 4PID parameter of PID number 5 of loop 4Control alarm setting for PID parameter 5 of loop 4PID parameter of PID number 6 of loop 4Control alarm setting for PID parameter 6 of loop 4PID parameter of PID number 7 of loop 4Control alarm setting for PID parameter 7 of loop 4PID parameter of PID number 8 of loop 4Control alarm setting for PID parameter 8 of loop 4
Setting value
Same range as parameter of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1
Read/WriteR/WR/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
Description
Same parameter as loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1
Parameter for each loopsPID parameter of PID number 1 of loop 5Control alarm setting for PID parameter 1 of loop 5PID parameter of PID number 2 of loop 5Control alarm setting for PID parameter 2 of loop 5PID parameter of PID number 3 of loop 5Control alarm setting for PID parameter 3 of loop 5PID parameter of PID number 4 of loop 5Control alarm setting for PID parameter 4 of loop 5PID parameter of PID number 5 of loop 5Control alarm setting for PID parameter 5 of loop 5PID parameter of PID number 6 of loop 5Control alarm setting for PID parameter 6 of loop 5PID parameter of PID number 7 of loop 5Control alarm setting for PID parameter 7 of loop 5PID parameter of PID number 8 of loop 5Control alarm setting for PID parameter 8 of loop 5
Setting value
Same range as parameter of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1
Read/WriteR/WR/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
Description
Same parameter as loop 1(*2)
Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1
Parameter for each loopPID parameter of PID number 1 of loop 6Control alarm setting for PID parameter 1 of loop 6PID parameter of PID number 2 of loop 6Control alarm setting for PID parameter 2 of loop 6PID parameter of PID number 3 of loop 6Control alarm setting for PID parameter 3 of loop 6PID parameter of PID number 4 of loop 6Control alarm setting for PID parameter 4 of loop 6PID parameter of PID number 5 of loop 6Control alarm setting for PID parameter 5 of loop 6PID parameter of PID number 6 of loop 6Control alarm setting for PID parameter 6 of loop 6PID parameter of PID number 7 of loop 6Control alarm setting for PID parameter 7 of loop 6PID parameter of PID number 8 of loop 6Control alarm setting for PID parameter 8 of loop 6
Setting value
Same range as parameter of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1Same range as PID parameter for PID number 1 of loop 1Same range as control alarm setting for PID number 1 of loop 1
Read/WriteR/WR/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
Description
Same as parameter of loop 1(*2)
Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1Same PID parameter of PID number1 of loop 1Same control alarm setting as PID number 1 of loop 1
*1 : In case of reading register of only Write, O will be returned.
*2 : Loop 5 and loop 6 don't have bias setting, filter setting, ratio setting, and remote/local switching for Remote and PV range.
*3 : For rest of segment time and Process time of wait time (hh hour, mm minute, ss second), 3 registers hh, mm, and ss have to be read.*4 : Each bit of registers expresses an event status.
If each bit is 1, the event that corresponds to is ON.
In reading these data with ladder communication, the value needs to be transferred to 16 bit coded integer in upperhand host because the data that is transferred to BCD returns.
Bit0123456789101112131415
Event No.12345678910111213141516
AF10.EPS
Setting0: event OFF 1: Event ON0: event OFF 1: Event ON0: event OFF 1: Event ON0: event OFF 1: Event ON0: event OFF 1: Event ON0: event OFF 1: Event ON0: event OFF 1: Event ON0: event OFF 1: Event ON0: event OFF 1: Event ON0: event OFF 1: Event ON0: event OFF 1: Event ON0: event OFF 1: Event ON0: event OFF 1: Event ON0: event OFF 1: Event ON0: event OFF 1: Event ON0: event OFF 1: Event ON
Program operation RUN/STOPHOLD for program operationSegment AdvancePattern number switching in case of Stop of program operationPattern number of operationSegment number during operation
Rest of segment time during operation (hh, hour)Rest of segment time during operation (mm , minute)Rest of segment time during operation (ss, second)Waite statusProcess time of wait time during being wait (hh, hour)Process time of wait time during being wait (mm, minute)Process time of wait time during being wait (ss, second)Repeat Number during operationRest of repeat number during operationRepeat start number during operationRepeat end number during operationPattern end signalTime event statusPV event status
Settings
0 : STOP 1 : RUN0 : not Hold 1 : HOLD1 : Advance request1 : Pattern number 1 : 30 : Pattern number 30
1 : Pattern number 1 : 30 : Pattern number 300-99, however 0 is time after stating program operation until program pattern start.0-99(*3)
0-59(*3)
0-59(*3)
0 : not available, 1 : in being Wait0-99(*3)
0-59(*3)
0-59(*3)
0-9990-9991-991-990 : not available, 1: Pattern end(*4)
*5 : Measurement data and Math data alarm statuses are set at 16 bit integer by the order, alarm level 2, alarm level 1, alarm level 4, and alarm level 4. 0-8 value is set for each alarm level with 4 bit. This 0-8 corresponds to high/low limit, differential high/low limit, high/low limit of rate-of-change, high/low limit of delay. In reading these data with ladder communication, the value needs to be transferred to 16 bit coded integer at upperhand host because the data that is transferred to BCD returns
*6 : Control data alarm status is set by order, alarm level 2, alarm level 1. For 2nd register, order of alarm status is level 4 and level 3. 0, 21-30 are set with 8 bits for an alarm level. These 21-30 corresponds to high/low limit, differential high/low limit, high/low limit of rate-of-change, high/low limit of delay. This is also needed to transfer from BCD data to 16 bits coded integer.
*7 : In control alarm status of D755 and D7552, each 16 bit coded register expresses each alarm level of loops. If an alarm level for each loop is ON regardless of any kinds of alarm, the corresponding bit is 1. In reading these data with ladder communication, the value needs to be transferred to 16 bit coded integer in upper hand host because the data that is transferred to BCD returns. In reading D7551 and D7552 for loop model and reading D7552 for loop model, and 4 loop model(or in selecting 4 loop use for 6 loop model), error(error code 2) returns.
Measurement dataMeasurement dataMeasurement data alarm statusMeasurement data alarm statusMath dataMath dataMath dataMath dataMath data alarm statusMath data alarm statusControl dataControl dataControl data alarm statusControl data alarm statusControl data alarm statusControl data alarm statusControl alarm status (1-4 loops)Control alarm status (6-6 loops)YearMonthDateHourMinutesecondsMm Summer, winter
Data
Measurement data of CH1Measurement data of CH30Measurement data alarm status of CH01 (*5)
Measurement data alarm status of CH01 (*5)
Math data of CH31 (high order of 5 digit)Math data of CH31 (low order of 5 digit)Math data of CH60 (high order of 5 digit)Math data of CH60 (low order of 5 digit)Math data alarm status of CH31 (*5)
Math data alarm status of CH60 (*5)
Control data 0f CH101Control data 0f CH118Control data alarm status of CH101 (A2A1) (*6)
Control data alarm status of CH101 (A4A3) (*6)
Control data alarm status of CH101 (A2A1) (*6)
Control data alarm status of CH101 (A4A3) (*6)
Alarm status at 1-4 level for each 1, 2, 3, 4 loop (*7)
Alarm status at 1-4 level for each 5-6 loop (*7)
Year (4 digits)1-121-310-590-590-990-07 125ms unit0 : winter time 1 : summer time
D7551 Bit configuration for control data alarm status (1-4 loop)
Bit0123456789
101112131415
AF12.EPS
Loop 1 alarm at level 1 (If 1, alarm ON. If 0, alarm off)Loop 1 alarm at level 2 (If 1, alarm ON. If 0, alarm off)Loop 1 alarm at level 3 (If 1, alarm ON. If 0, alarm off)Loop 1 alarm at level 4 (If 1, alarm ON. If 0, alarm off)Loop 2 alarm at level 1 (If 1, alarm ON. If 0, alarm off)Loop 2 alarm at level 2 (If 1, alarm ON. If 0, alarm off)Loop 2 alarm at level 3 (If 1, alarm ON. If 0, alarm off)Loop 2 alarm at level 4 (If 1, alarm ON. If 0, alarm off)Loop 3 alarm at level 1 (If 1, alarm ON. If 0, alarm off)Loop 3 alarm at level 2 (If 1, alarm ON. If 0, alarm off))Loop 3 alarm at level 3 (If 1, alarm ON. If 0, alarm off)Loop 3 alarm at level 4 (If 1, alarm ON. If 0, alarm off))Loop 4 alarm at level 1 (If 1, alarm ON. If 0, alarm off)Loop 4 alarm at level 2 (If 1, alarm ON. If 0, alarm off)Loop 4 alarm at level 3 (If 1, alarm ON. If 0, alarm off)Loop 4 alarm at level 4 (If 1, alarm ON. If 0, alarm off)
D7552 Bit configuration for control data alarm status (5-6 loop)
Bit0123456789101112131415
Loop 5 alarm at level 1 (If 1, alarm ON. If 0, alarm off)Loop 5 alarm at level 2 (If 1, alarm ON. If 0, alarm off)Loop 5 alarm at level 3 (If 1, alarm ON. If 0, alarm off)Loop 5 alarm at level 4 (If 1, alarm ON. If 0, alarm off)Loop 6 alarm at level 1 (If 1, alarm ON. If 0, alarm off)Loop 6 alarm at level 2 (If 1, alarm ON. If 0, alarm off)Loop 6 alarm at level 3 (If 1, alarm ON. If 0, alarm off)Loop 6 alarm at level 4 (If 1, alarm ON. If 0, alarm off)