1959 Higgins and Holland: The Human Being as a Link in an Automatic Control System 125 that it is impossible for him to initiate a cycle simply by thus, for example, we are still concerned with questions of staying on the bars during the inter-trial interval.2 compartment layout and manipulanda. Also, we propose to This recording-programming system should have many substitute a rapid-changing slide projector for the present applications; with the exception of the animal compartment strip-film device in the future. Since the slide projector and the stimulus projector, its elements should be as serv- will permit random access to any of 50 different slides, se- iceable for studies using other kinds of subjects. We have lection of the stimulus can be put directly under the control not as yet finalized design of the specialized components; of the read card. This innovation will also enable us to make presentation of any given stimulus pattern contingent upon the animal's preceding response, a feature of sub- ' Complete schematics may be obtained from the authors. stantial interest to the probability learning theorist. The Human Being as a Link in an Automatic Control System-Part J* T. J. HIGGINSt AND D. B. HOLLAND±t I. PURPOSE OF THE STUDY the control system with little or no consideration or under- r HE PURPOSE of this study is twofold: 1) to ad- standing of the capacities or limitations of the human op- vance a critical, integrated account of the conse- erator as an element in the system. Therefore, attainment quential investigations that have been made into the of successful performance required a corresponding change role of the human as an element in a servomechanism or in the nonhuman elements to obtain a successful integration automatic feedback control system, and 2) to formulate a of performance. corresponding definitive closed-loop transfer function for The military services, through incorporation of the a system incorporating a human element. human as an element in fire-control systems, were among the first to appreciate the fact that a rather definitive knowl- II. VALUE OF THE STUDY edge of the control aspects of the human operator was nec- Medical people have studied human motion as a func- essary, both from a training aspect and from the fact that tion of nerves, muscles, and brain for many years. Only in new high-performance equipment was incompatible with recent years, however (primarily, during and since World the associated human operator. Ideally, this situation might War II), has the engineer come to have a particular interest best be met by eliminating the human operator as an ele in the human as a voluntary or involuntary operator of ment of the system, thus obtaining a completely automatic devices in an automatic control system. This particular in- control system It is the professional opinion of the second terest stemmed from the fact that, often, a control system named author that, often, this is more feasibly accom- incorporating the human element had a performance dif- plished in industrial applications than in military applica- ferent from that desired and/or designed for; and the lack tions Manymilitaryapplicationsinherentlyinvolvecha of or difference in desired performance proved to result in decisions resulting in imposition of more complicated from the actions of a human operator comprised, by design performance requirements than for nondecision industrial or necessity, as a part of the complete control system. In applications On the other hand, the military is not blind such cases of substandard performance, it commonly to the advantage to be gained through elimination of hu- proved that either the human operator did not properly do man operation when this is desirable. Thus, anti-aircraft tracking radar used early in World his part in the system, in which case particular instruction War II automatically tracked a plane in azimuth and elevation, but the range-track was afected wholly by a human operator. Toward the end of the war, engineers * Manuscript received hy the PGME, May 13, 1959. This paper developed a system incorporating automatic range-tracking is hased on a thesis supervised hy Prof. Higgins and submitted by by radar. Then the role of the human operator became that Major Holland to the faculty of the University of Wisconsin in June, 1956, in partial fulfillment of the requirements for the M.S. of roughly aligning the radar antenna with a designated degree in electrical engineering. paetre n hnpsigabto hc nrie t University of Wisconsin, Madison, WiS. paetre n hnpsigabto hc nrie t U.S. Army Medical Corps., Ofice of Adjutant-General, Wash- radar tracking of the target in azimuth, elevation, and ington, D.C. range. A very considerable improvement in over-all per-
Transcript
1959 Higgins and Holland: The Human Being as a Link in an Automatic Control System 125
that it is impossible for him to initiate a cycle simply by thus, for example, we are still concerned with questions ofstaying on the bars during the inter-trial interval.2 compartment layout and manipulanda. Also, we propose to
This recording-programming system should have many substitute a rapid-changing slide projector for the presentapplications; with the exception of the animal compartment strip-film device in the future. Since the slide projectorand the stimulus projector, its elements should be as serv- will permit random access to any of 50 different slides, se-
iceable for studies using other kinds of subjects. We have lection of the stimulus can be put directly under the controlnot as yet finalized design of the specialized components; of the read card. This innovation will also enable us to
make presentation of any given stimulus pattern contingentupon the animal's preceding response, a feature of sub-
' Complete schematics may be obtained from the authors. stantial interest to the probability learning theorist.
The Human Being as a Link in an AutomaticControl System-Part J*
T. J. HIGGINSt AND D. B. HOLLAND±t
I. PURPOSE OF THE STUDY the control system with little or no consideration or under-r HE PURPOSE of this study is twofold: 1) to ad- standing of the capacities or limitations of the human op-
vance a critical, integrated account of the conse- erator as an element in the system. Therefore, attainmentquential investigations that have been made into the of successful performance required a corresponding change
role of the human as an element in a servomechanism or in the nonhuman elements to obtain a successful integrationautomatic feedback control system, and 2) to formulate a of performance.corresponding definitive closed-loop transfer function for The military services, through incorporation of thea system incorporating a human element. human as an element in fire-control systems, were among
the first to appreciate the fact that a rather definitive knowl-II. VALUE OF THE STUDY edge of the control aspects of the human operator was nec-
Medical people have studied human motion as a func- essary, both from a training aspect and from the fact thattion of nerves, muscles, and brain for many years. Only in new high-performance equipment was incompatible withrecent years, however (primarily, during and since World the associated human operator. Ideally, this situation mightWar II), has the engineer come to have a particular interest best be met by eliminating the human operator as an elein the human as a voluntary or involuntary operator of ment of the system, thus obtaining a completely automaticdevices in an automatic control system. This particular in- control system It is the professional opinion of the secondterest stemmed from the fact that, often, a control system named author that, often, this is more feasibly accom-incorporating the human element had a performance dif- plished in industrial applications than in military applica-ferent from that desired and/or designed for; and the lack tions Manymilitaryapplicationsinherentlyinvolvechaof or difference in desired performance proved to result in decisions resulting in imposition of more complicatedfrom the actions of a human operator comprised, by design performance requirements than for nondecision industrialor necessity, as a part of the complete control system. In applications On the other hand, the military is not blindsuch cases of substandard performance, it commonly to the advantage to be gained through elimination of hu-proved that either the human operator did not properly do man operation when this is desirable.
Thus, anti-aircraft tracking radar used early in Worldhis part in the system, in which case particular instruction War II automatically tracked a plane in azimuth andelevation, but the range-track was afected wholly by ahuman operator. Toward the end of the war, engineers
* Manuscript received hy the PGME, May 13, 1959. This paper developed a system incorporating automatic range-trackingis hased on a thesis supervised hy Prof. Higgins and submitted by by radar. Then the role of the human operator became thatMajor Holland to the faculty of the University of Wisconsin inJune, 1956, in partial fulfillment of the requirements for the M.S. of roughly aligning the radar antenna with a designateddegree in electrical engineering. paetre n hnpsigabto hc nrie
t University of Wisconsin, Madison, WiS. paetre n hnpsigabto hc nriet U.S. Army Medical Corps., Ofice of Adjutant-General, Wash- radar tracking of the target in azimuth, elevation, andington, D.C. range. A very considerable improvement in over-all per-
126 IRE TRANSACTIONS ON MEDICAL ELECTRONICS September
formance thus resulted. However, as the human operator tion of the recent detailed study grew out of control experi-still functions in some respect as noted, his limitations and ences in World War II.capabilities still need to be encompassed in the design of The second part of the study comprises the desiredsuch equipment. analytic formulation of performance characteristics throughThere is, of course, much up-to-date equipment used in use of the content garnered in Section I. It is the authors'
both industry and the military services, where the role of belief that formulation of the performance of the humanthe operator is more important than as cited in the preced- operator as a control element is such that the engineer caning example. In fact, a paradox of modern design is that use it profitably in over-all design of a control system in-while redesign of equipment for more automatic operation corporating a human element.may eliminate the functions of several operators, it may The content of the present paper includes a part of thepose increased demands on a remaining single human op- study done by Major Holland during 1955-1956. A com-erator. For example, certain present-day military aircraft plementary part comprising consideration of pertinentand certain proposed future designs manifest an undesir- literature published since the conclusion of his work andable tendency towards lateral oscillations under specialized subsequent re-evaluation and extension of the study to datemanual control. This difficulty naturally led to rather de- is to be advanced in a second companion paper.tailed investigations of pilot functionings to enable the ob-taining of a better integration of plane design and pilot IV. OBTAINING THE BASIC INFORMATIONaction. As a first step in the study, each of the 71 listed refer-The above examples illustrate the essential problem, ences, as available, was read to gain knowledge of the re-
namely, that a high-performance automatic control sys- search discussed therein relative to the control aspects oftem may involve a human operator as an element in this the human operator. Much of the content was judged incon-complete system. This human element should be encom- sequential. It appeared that the content pertinent to thepassed in the over-all design, and not fitted into the system study was included in, essentially, references [65], [5],by subsequent modification of the physical part of the con- [43], [28], [70], [23], [4], [57], [34], [47], [13],trol system. If this is to be successfully accomplished, the [40], [10], [20], [51], and [69]. Each of these was thenpertinent aspects and functionings of the human element carefully studied and a concise and critical summary of con-should be well-known and utilized accordingly. This im- sequential content was prepared. Limitations of space na-plies, in turn, that these aspects and functionings are easily turally preclude advance of these here. These gleaningsdescribable analytically. In modern control theory parlance, comprise the basic information underlying the formula-this means that the corresponding differential equations of tions of the following section.performance of the human element be known. If these V FORMULTION OF TRANSFER-FUNCION FORprove to be linear, the corresponding equivalent transfer' . ,~~~~~~~~THE HUMAN OPERATORfunction of the human element can be obtained from them. A. FormulationIf they prove to be nonlinear, then further pertient repre- o
kI
al e
sentation may not be possible. The determination of pre- The remarked reading and critical abstracting led to thecisely such aspects of analytic description from the accumu- conclusion that Hick's description of the mechanics of hu-lated mass of published information, particularly from re- man control was the most accurate and complete. Accord-ports of human operator studies, comprises the centrol ingly, the first step was to couch his descriptive account intheme of this study. analytic form. The subsequent formulation appeared to be
both more general than others then existing in the litera-III. SCOPE OF THE STUDY ture, and to encompass explanation of much experimental
As indicated in Section I, and in accordance with the data not included in less general published formulations.remark in Section II, this study is divided into two major The two basic differences between the approach in thisparts. The first part comprises an account of these conse- study and those published earlier comprise considerationquential results published in the pertinent and very exten- of: 1) the human element as having a very vital and basicsive literature, comprised of papers, articles, reports, books, feedback path which renders him a closed-loop control sys-etc., which enable formulation of the desired equations of tem; and 2) the input thereto as of single-sequence opera-performance. In such an account, only the voluntary move- tion. This means that the human has the ability to focus hisments are considered; i.e., reflex functionings and capabil- attention on the input stimulus or the feedback monitor, butity are not considered. Again, attention is focused on gen- not on both simultaneously. (This switching of attentioneral characteristics of the human operator, and not on a may occur consciously or unconsciously.)characteristic peculiarly associated with use of a specific In [43], Hick remarks as follows.equipment, except where this comprises a general character- "It is clearly important for the learning process thatistic of operation. It may be noted that the literature of con- the stimulus and its response should not be confusedsequence is encompassed, roughly, within the past fifteen and obscured by other stimulus-response pairs run-years, and largely in the past decade; this fact is in accord- ning more or less concurrently. Hence, there is a prob-ance with the remark made in Section II that the realiza- ability, with some introspective support, that the op-
1959 Higgins and Holland: The Human Being as a Link in an Automatic Control System 127
erator waits until there is recognizable and relevant Am (S)result from his previous response before considering X S cSE(s) MoTOR EKEM(S)a further one. Where the response is a movement of ELEMETS AND CoWT16Idefinite extent-i.e., positional tracking-it will nor-mally take about 0.15 second before it becomes per- STIMULUS
c
DCO Iceptibly right or wrong, so that, adding 0.35 second for 50.aCLE SCOUENcE (S)reaction time (with refractory delay), the interval of OPEA-TI,'oPH1HASintermittent functioning will be about 0.5 second." SHORT T-rtE MEMORY Fiec 8ACK(Fig. 1 shows the functional relationships between the ELE M-TS
three basic components of a human control system. The Fig. 1.central nervous system, comprising the brain and associatednerves, samples the input stimulus, R (s), in terms of theelectrical output of sensory elements. With R(s) as an vinput, the central nervous system effects a mental compari-son of this input with feedback data that are stored by ashort-time memory. This analysis time, denoted in Fig. 2 Xby the time interval 0- T1, is of the order of magnitude t | e (t)of 0.3 second. Again referring to Fig. 2, at the instant u.j tt = T1, a decision is made for the sending of an electrical 0 T T3 T4T,signal to the motor element. This decision, designated by el' s l(t) in Fig. 2, is the actuating signal of the human control z l Isystem. The motor element, designated by G(s) in Fig. 1, A Ithen yields the response C(s) of the human control in Xlterms of position. During this activating period of the Xmotor element, the central nervous system monitors this Cresponse for a period of (T2 - T1) seconds, as shown in e, (t) eL (t)Fig. 2. In this interval the central nervous system switches xTfull attention to the monitoring of the response, C(s), and
0T
no attention is utilized for the receiving of new incoming -4
stimuli, R (s). The interval, T2 - T1, is of the order ofmagnitude of 0.2 second. At the instant t = T2, attention Fig. 2.is switched back to the act of receiving new stimuli R(s),which will start again at the instant t = T3. This completesone sampling cycle for the human control system. Taking the Laplace transform of (3) givesTo represent repeated cycles of such sampling analyti- E21(s) = e-T3SEA(s) (4)
cally, it is first convenient to find the transform of a sumof repeated monitoring pulses, such as over T2 - T, in Correspondingly, in generalFig. 2. Thus, the nth stimulus decision and monitoring in-terval, en/(t), in terms of the first stimulus decision pulse En'(S) = e(n-l)T3sEj'(s). (5)el'(t), is determined as follows: because of the mental The transform of the actuating signal E'(s) of this dis-analysis period, 0 - T1, the first stimulus decision is de- tinsformo f bysing theofite slayed by T1 and is thus described by: continuous system is afforded by summing the infinite se-
quence of pulses with transforms as in (5). Thus,ei'(t) = 0 !t<T1
= e(t-T,) T1< I < T2 E'(s) = [ E e-(n-1)T38 Ej'(s)= 0 t > T2. (1) n=-
= Ej'(s)/(1 e-T34s). (6)Likewise, the second stimulus decision is delayed byTike ITs, the s n tus deciisio is Next, the transform of E1'(s), the first decision andT3±T,adi hu ecie y monitor period, is determined in terms of the signal,e2 (I) = 0 t < T3 + T1 r(t) - B(t), over the original sampling interval, 0 -T1.
128 IRE TRANSACTIONS ON MEDICAL ELECTRONICS September
from which B. Stability
El'(s) = E(s) e-T8(1 -e-T28). (9) With the block diagram of Fig. 3 on hand, the stabilityof the corresponding system as a function of the param-
Substituting from (9) in (6) gives eters T1, T7 and T3 can now be investigated. The writers
E'(s) = E(s)e-Tis(1 - e-T28)/(1 - e-T38) (10) are in accord with Hick as to the dependence of the natureof the stability on the human's parameters. In essence, Hick
where E (s) = R (s) -B (s). states that if reaction time is lengthened and/or the periodIf E'(s) is an actuating signal to a human-operator of stimulus is decreased, a point of operation is reached
closed-loop control, the operator's response C(s) is where disorganization of action results. His prime reason
C(s) = E/(S)G(S) (11)for believing this is that the human operator is capable ofsingle-sequence operation only. Thus, as in [43]:
where G(s) represents the transfer function encompassing "Apparent refractoriness, in the sense of a length-the neuromuscular lag plus the limb and load inertia. Sub- ened reaction time, will result from any complicationstituting from (10) in (11) gives of the task. Sometimes the complication will appear
as an interference with expectancy or division of at-C(s) = E(s)[eTw8(1 - eT2s)/(1 - e-Tss)]G(s) tention, sometimes as a demand for a more complex
= E(s)Gj(s)G2(s) (12) analysis of the stimulus pattern."where Hick, in effect, remarks that this discontinuous function of
where-T28)/(l - e-Tvthe human operator suggests a refractory phase. To avoid
Gi(s) = [e-TI](1 eT28)/(1 - Cr38) this refractory phase of operation, successive stimuli must
is the transfer function encompassing reaction time-lag and be separated by intervals of at least 0.2 second. This 0.2G2(s) is the transfer function encompassing neuromus- second is the value of (T2- T7) and is the interval neededcular-load time-lag. It is possible that G2(s) acts as an for monitoring.integrator [70]. Consider this inference in terms of the foregoing trans-
Also, one can consider F(s) as the result of a mental fer-function of the human operator for repeated stimulus.operation on [lR (s) - B (s) previous cycle], which will in- The refractory phase exists when T2 > 73 Now theclude position error and compensation. Thus,
where G3(s) encompasses compensation or mental anticipa- This somewhat parallels the expression given by manytion and Ep(s) is the transform of the position error signal. authors, namely,
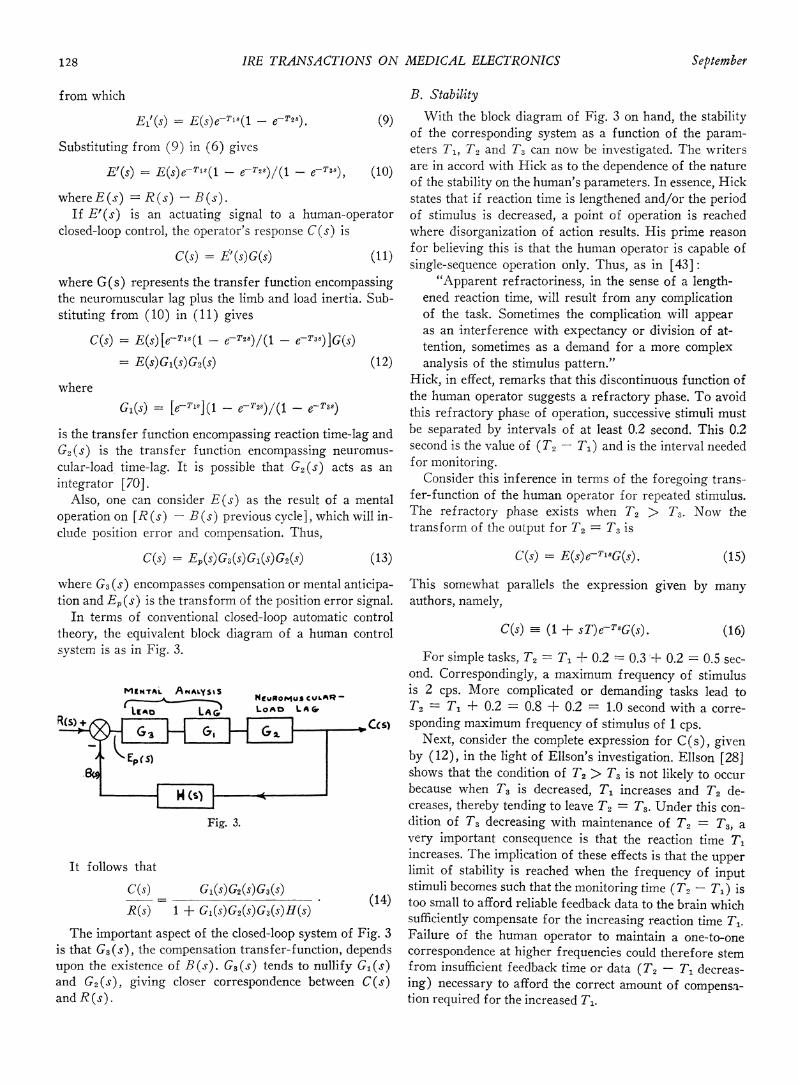
In terms of conventional closed-loop automatic controltheory, the equivalent block diagram of a human control C(s) (1 + sT)eTsG(s). (16)system is as in Fig. 3. For simple tasks, T2-7 T., + 0.2 -0.3 + 0.2 = 0.5 sec-
ond. Correspondingly, a maximum frequency of stimulusMINWTAL ANALySIS is 2 cps. More complicated or demanding tasks lead tot- -_ NCeUROMUsCVLAR7 T2 = T±+ 0.2 = 0.8 + 0.2 = 1.0 second with a corre-LEAD LAG LoAD LAC-
R((s) + O71 2.Ccs) sponding maximum frequency of stimulus of 1 cps.
1 J §Next, consider the complete expression for C (s), givenixEp(s) by (12), in the light of Ellson's investigation. Ellson [28]
SO shows that the condition of T2 > T3 is not likely to occurbecause when T73 is decreased, T, increases and T2 de-w lS) creases, thereby tending to leave T2 = T3. Under this con-
Fig. 3. dition of T3 decreasing with maintenance of T2 = T3, avery important consequence is that the reaction time T,increases. The implication of these effects is that the upper
It follows that limit of stability is reached when the frequency of inputC(s) G I(s)G2(s)G3(s) stimuli becomes such that the monitoring time (72- T ) is
R(s) 1Gl(s)2(s)G3s)H(s)(14) too small to afford reliable feedback data to the brain whichR(s) =1±Gi(s)G2(sG3(s)H(s)sufficiently compensate for the increasing reaction time 77k.The important aspect of the closed-loop system of Fig. 3 Failure of the human operator to maintain a one-to-one
is that G3 (s), the compensation transfer-function, depends correspondence at higher frequencies could therefore stemupon the existence of B(s). C3 (s) tends to nullify C1 (s) from insufficient feedback time or data (772- 77 decreas-and C2 (s), giving closer correspondence between C(s) ing) necessary to afford the correct amount of compensa-and R(s) . tion required for the increased T1.
1959 Higgins and Holland: The Human Being as a Link in an Automatic Control System 129
At lower frequencies of input stimuli, T3 > T2, the re- For use in practice, n = 3 may well be satisfactory. If so,action time and monitoring time appear to be relatively the transfer-function of the required network isconstant. Under this operating condition, failure to main- A-Eo Etain one-to-one correspondence could result from excessive 0(s)/Ein(S)G2(s) lags caused by the neuromuscular load subsystem = [(1 + Ts/3)(1 + Ts/3)(1 + Ts/3)][1 + T's] (20)not being sufficiently compensated because of inadequate where the first bracketed term provides compensation forfeedba4ck data. the human operator delay term G1 (s) e Ts and the secondif in (12) the parameters are such that IF, » IF2, then bracketed term provides compensation for the neuromus-
C(s) - E(s)e-Ts(1 -e-T28)G(s). (17) cular load delay, G2(s).The smaller T2 is, the larger is the over-all time constant VI. INTEGRATIONof C(s)/E(s). This is undesirable in general because a A. Introductionsmaller T2 usually results in less feedback data, and there- To evaluate the human operator's role in automatic con-fore less effective compensation. The value of T2 could be trol systems, it is first necessary to understand the funda-a function of irrelevant outside stimuli in the form of dis- mental mechanism of voluntary movement of the human.traction. It would be desirable to make T2 as large as pos- The extent of the detailed understanding of this mechanismsible relative to T, in order to insure maximum time for essential to enable the automatic control engineer to designfeedback and minimum effective time-lag. In other words, rationally a successfully integrated control system is diffi-the appearance of any other stimulus near T, should be cult to demark. In a first estimation, it could be taken thatavoidged so that the humanoperator cangainthefulladvan the required degree of knowledge depends upon the criti-tage afforded by the monitoring time. cality of the human operator's role in the system under de-
sign. As remarked earlier, it would appear that often theC. A Compensation Netwvork for the Human Operator control-system designer has not properly evaluated theIf it is desired that the human operator be relieved, inso- criticality of the human operator's role in a system; there-
far as is possible, of the task of making mental compensa- fore, only partial success in obtaining the desired over-alltion for himself and the machine portion of the system, or performance has resulted.if a problem exists where the operator has no knowledgeof the output, it is desirable to inject compensation by B. The Basic Mechanismn of Human Operator Controlmeans of some type of electrical, mechanical, or hydraulicnetwork. Such is evidenced in the network of Fig. 4. Based on information obtained from the critically-sum-
marized references in Section IV and from other sourcesnot so summarized, the following would appear to comprise
6rwl Li(s) a reasonable theory of operation for the human operator.LERo 14ETWORKS sIRQ1t4 TA o. From the broadest point of view, the human operator
R(s) C(s) functions as shown in Fig. 5. Thus, he causes a one-to-one
A' s i (ssHu CsR s) HUMANr C(s)
REFERfNCE, MODEL) Fig. 5.DuPLiCA-rTiS G,WIT4 L UUN%T3
Fig. 4.correspondence between his output, C(s), and what hedeems necessary to do, R(s). Under certain conditions, he
The transfer-function eTls can be represented as follows: will fall short of this one-to-one correspondence; underT other conditions, his efforts to maintain correspondence will
e-T8 = lim1n 1 +-I be completely chaotic. Before these specific conditions areIn--+\0 n / discussed, the two primary causes of failure to maintain
// Ts\ s exact correspondence may well be stated. These are:= lmlm1 1+-) 1+- *** . (18) 1) Time-lag contributed by mental analysis, termedlchoice reaction time.
For such expression, the transfer function of the compen- 2) Time-lag contributed by the neuromuscular-loadsating network would be of the form system.
Iim 1 + s/n)l + s/n(l +Ts/n * (- . 19) Thus, the block design of Fig. 5 may be divided as inun( sn( s/)1+T/) . (9 Fig. 6. Nature, functioning as a "natural" engineer, is dis-
130 IRE TRANSACTIONS ON MEDICAL ELECTRONICS September
satisfied with the inherent limitations of the human op- If T2 > T3 (see Fig. 2), T1 becomes extremely largeerators' control system. Compensation is used to nullify and a refractory phase in which the efforts of the operatorthese inherent time lags, but, as in machine control systems, are fruitless in maintaining output-to-input correspond-for the compensations to be effective, the output, C(s), must ence results. If T2 < T, but B signals are not of sufficientbe part of the input to the compensator, as evidenced in Fig. strength, or if the operator has not learned to use them,7. Although compensation is shown as a separate block the compensation will not be sufficient to nullify the time-in Fig. 7, it actually occurs in the form of a mental decision lag comprised of reaction time and neuromuscular-loadresulting from the comparison of what is wanted and what lags. This is particularly true if the reaction time is long,is happening. (This fact underlies the importance of feed- due either to a difficult decision or to an extra-long motionback.) that has to be made or to load inertia [70].
D. Considerations of DesignDevelopment up to this point enables formulation of
some rules to aid the designer of control systems whichFig. 6. incorporate a human operator.
First, the task of the human operator should be made asD£vIRIo FROM SeNSORy UNITS simple as possible so that the reaction time, T1, will be rela-
( tively small. As shown by Hick, choice reaction time is pro--CoSt'N- RE'CTtON LoUANAU5CVL%P portional to loge (n + 1) where n is the number of existing
R(s) BRPIN TM L 1 C(S) alternatives. A simple task requires a reaction time of ap-R&G21. G proximately 0.2 second, whereas more complicated tasks
PoSiTioN DR Irequire 0.5 to 0.8 second, approximately..POSITiON f>ND ITS DERI~tvAIveS Second, the input signals r(t) must be both strong andFRom ESENSSoRY UN ITS
unambiguous. This requires consideration of itemis such asFig. 7. dial readability, lighting, audio-frequency tonality, loud-
Up to this point, no considerable difference exists be- ness, color, and other considerations, depending on the situ-tween the human operator's control system and the simple ation in hand.tyeenofesingl closed-loo control system so thoug.1 Third the human operator should not be expected to re-type of single closedt-loop control system so thoroughly Y
analyzed in basic automatic control theory. The uniqueness spond accurately to stimuli spaced at intervals of less thanof the human control system lies in the discontinuous man- one second. In fact, it is better, regarding reliability andner in which the brain, or central nervous system, func- accuracy of control, to maintain an interval of approxi-tions. The central nervous system is a single-sequence com- mately 2 seconds.munication channel; or, in less sophisticated language, the Fourth, the neuromusclar lag-time should be kept to a
brain first focuses attention upon the R (s) input derived reasonably low value. Gibbs [34] points out that the round-from the various sensory units long enough to make a deci- trip time required for a nerve impulse to cause the musclesion, and then switches attention to the act of monitoring to act and to return a signal is only 19 to 36 msec. This timethe results of its decision in terms of muscular output. As does not, however, include te time-lag stemming from thHick points out, this switching of attention implies that the compliance of the muscle and the inertia of the limb andbrain must have a short-time memory. its associated load. As stated by Wilkie [70], a combination
In spite of the discontinuous manner of operation, the of a 10- to 30-pound control load and a necessary consider-human operator's control system can be treated in terms of able movement or velocity dictates a 150- to 200-mseca continuous system, as stated earlier and as shown above time-lag. Therefore, if low values of neuromuscular time-in the equivalent block diagram of Fig. 7. lags are to be maintained, it is necessary that the operator
in teeuvetbo digaoFbe required to effect only small movements with smallC. Limits of Operation loads. This requirement may, however, conflict with the
Consider next and somewhat more quantitatively the Fifth, if compensation is required of the human operatorconditions under which the human operator fails to main- t i m pta one-to-one correspondence between his desire and his edevelop strong feedback signals within his own closed-loopoutput. The analysis of Section V affords an over-all trans-coTr stem.gThisdfact a mci/o cnsieainfer-function~~~~~~foh ua prtr aey emphasized most strongly. It iS a consideration that Hick,
r eT"l(1 - e-T28) - Gibbs, Bates and other medical writers on the human op-C(s) _ (1 - e-T3') jG2(S)G3(s) erator stress in their writing; but it is also a crucial consid-
-*(21) eration which design engineers often ignore.R(S) [re-T"(1 -e-2s) 1G()()The considerable importance of this consideration is well
L (1 -e-Ts) j 2s)3s illuminated by the following quotation from Gibbs [56]:
1959 Higgins and Holland: The Human Being as a Link in an Automatic Control System 131
"Here again, we can find useful clues to the im- with one-hand control. In these two cases the generatedportance of visuoproprioceptive relationships in control forces render some compensation of the humantracking. We will gain greatly in producing a homoge- operator's own time-lags, since muscular force is convertedneous and consistent general theory if we turn a great into an electrical feedback signal. If the submachine sys-deal of experimental attention to the proprioceptors, tem has a time-constant or lag, the human operator cannotwhich have been given insufficient attention in the render compensation for these lags unless some such in-tracking literature. This is true of many general pa- formation is provided him. Thus, in the above-mentionedpers, apart from Mr. North's, although roughly half of remote-handling application, precisely such information isthe nerve endings in skeletal musculative subserve the reflected back to him and, in turn, he can afford completeproprioceptors and have important central and periph- compensation.eral effects. This activity is generally unconscious and Machine feel for the operator could take the form ofcontinuous and it is natural perhaps that our verbal visual display. Several investigators [58] have shown thatexplanations tend to take more account of the shorter "pursuit" tracking is superior to "compensating" tracking.lived environmental signals which are consciously ex- In pursuit tracking, both the input and output functions areperienced." displayed to the operator; in compensating tracking, how-
Wiener [69] states: ever, only the difference between the input and output"Another interesting variant of feedback systems is functions is displayed to the operator. It is evident that
found in the way in which we steer a car on an icy the latter procedure tends, in some measure, to force himroad. Our entire conduct of driving depends on a to track poorly, so as to see the errors in position, velocity,knowledge of the performance characteristics of the and acceleration which need to be corrected. However, itsystem car-road. If we wait to find this out by the may well be that the superiority of one type of trackingordinary performance of the system, we shall discover with respect to the other depends strongly on the particularourselves in a skid before we know it. We thus give to application on hand.the steering-wheel a succession of small fast impulses, In the conclusion of this section, it is of interest to com-not enough to throw the car into a major skid, but ment on a general phrase which frequently occurs in thequite enough to report to our kinaesthetic sense literature on the human operator, namely, that "the humanwhether the car is in danger of skidding, and we regu- transfer function is very general and variable." An illustra-late our method of steering accordingly." tion of the "variability" or, more correctly-stated, "ad-These two quotations support a strong belief that a con- justability" of the human transfer-function is to be noted
siderable improvement in the correlation of the machine in the following example. If a change in complexity in in-subsystems and the human operator in a given system put stimulus causes a change in reaction time, the humancould stem from a greater recognition of the need of so operator adapts himself to this by compensation resultingoptimizing the generation of forces and motion as to enable from more effective use of proprioceptive feedback data. Ifthe fullest possible utilization of the human operator's feed- the machine input control characteristics are not such thatback loop. the human operator will generate adequate proprioceptiveAn alternative statement of such a requirement is, per- signals, an increase in reaction time will result in decreased
haps, that at his point of application the human operator accuracy of control.should have machine "feel." An aircraft automatically B Useallows the pilot to generate machine feel. The feel should er of Network Compensation wth the Humanencompass at least the output feel and its first derivative. OperatorAn interesting application of this principle concerned with Pure time delay, eT, imposes severe bandwidth require-remote handling in atomic energy work is described in ments, particularly in terms of required compensating leadseveral papers, as typified in that by Spooner and Weaver networks. In simple single-loop systems, a requirement of[59]. The point of application for the human operator large bandwidth for compensating networks is not com-actually reflects, in terms of force, what occurs at the out- patible with the requirements for stability. If, however, asput of the system. Lang and Ham [40] point out, a multiple-loop conditionalA simpler application of this principle, of feedback feedback system is used, it is relatively easy to synthesize
forces being generated at the point of application, is cited a control system incomporating a compensating networkby Gibbs and by Bates. Gibbs [34], [11] claims that a with large bandwidth and yet maintain stability and output-pressure-actuated joystick in an aircraft control is much response freedom from disturbance effects. By seeing thatsuperior to a free joystick. The supporting reason advanced all of the required compensation is included in the machinleis that the human operator must generate forces for con- portion of the system, the human operator acts in the sim-trol, and thereby generates his own feedback signals. Like- plest and most accurate manner.wise, Bates [5] suggests that inertia be added at the point A typical example of a multiple-loop conditional systemofapplication to improve accuracy. Again he points out is illustrated in Fig. 4. Here, if B AG1H, the
that two-hand control has some advantage as compared C = [U/(1 + G1G2H)] + AG1R. (22)
132 IRE TRANSACTIONS ON MEDICAL ELECTRONICS September
VII. CONCLUSION outputA review of the consequential literature on the human actuating signal
operator (up to the time when Part I of this study was (compensation) reaction4( n muscular )concluded) reveals that it is a subject of considerable in- time-lag / k load-lag /terest to the medical, psychology, and engineering profes- Although most writers do not so state or admit, thesions. In each domain, much work has been, and is being, transfer function of (23) is strictly true only ifcarried out with the intention of describing human operator T2 T3, where pure time-lag results, and it re-control action as quantitatively as possible. A summary of lates output to actuating error in a closed-loopthe more important aspects of human operator control ac- system, rather than output to input in an open-looption stemming from Part I of this study is as follows: system.
1) Functionally, the human operator is basically dis- 7) The human operator functions most effectively whencontinuous. That is, he samples the input stimulus required to provide the least compensation. If he isover a period of from approximately 0.25 to 0.8 required to provide compensation, it behooves thesecond, during which interval he takes no action but system designer to provide the human operator withanalyzes the current stimulus data in relation to ample knowledge of the system response resultingprevious feedback data; then, for a subsequent period from his action.of approximately 0.15 to 0.3 second, he acts and moni- 8) For successful design, the designer of a control sys-tors his decision. It is during this latter period that tem incorporating a human operator should treat thehe gets feedback data with which he compares sub- human operator as an integral part of his systemsequent input stimuli and makes a decision. This de- from the outset of design.cision encompasses compensation, if any occurs.
REFERENCES2) The human operator control characteristic is defi- [1] J. C. Baker and C. B. Gibbs, "Free-moving versus fixed-controlnitely closed-loop. The loop is closed only after the levers in a manual tracking task," presented at the D.S.I.R.
decision is made and during the corrective action pe- Conference on Automatic Control, Cranfield, Engl., July 16-21,riod. As shown in_Fig. 7 .,this basically discontinuous 1951; published in "Automatic and Manual Control," Butter-n1od . as shzown in Fig. 7, thils basically di1scontinuous worths Scientific Publications, London, Engl., pp. 467-472;
closed-loop system can be represented by an equiva- 1952.lent continuous system. It is this closed-loop charac- [2] J. W. Ballard and R. W. Hessinger, "Factual sensory controlsystem," Elec. Mfg., vol. 54, pp. 118-121; October, 1954.teristic that indirectly enables the operator to antici- [31 G. H. Barnes and E. S. Krendel, "Interim Report on Human
pate orcompensatefor system delays.Frequency Response Studies," Wright Air Dev. Center, Dayton,pate or compensate for system delays. Ohio, Tech. Rept. 54-370; June, 1954.3) The neuromuscular-load portion of his control- [4] F. Bartlett, "Human control systems," Trans. Soc. Instr. Tech.,
vol. III9 pp. 134-142; September, 1951.system has a time-lag associated with it. This can be [5] J. A. V. Bates, "Some characteristics of a human operator,"made small, but even so it may be important in gen- J. IEE (London), vol. 94, pt. II A, pp. 298-304; May, 1947.made mallbutevens [6m L. S. Beale, Jr., "The human in closed loop control circuits,"erating feedback data. The time-lag may vary from presented at the AIEE Conference on Feedback Control Sys-approximately 40 to 400 msec, depending upon the tems, Atlantic City, N.J.; December 6-7, 1951.approxi y 0[7]O. J. Benepe, D. G. ElIson, and R. Narasimhan, "An Experi-inertia of the load at the point of application of man- mental Evaluation of the Application of Harmonic Analysis toual control and the velocity needed to perform the the Tracking Behavior of the Human Operator," Wright AirDev. Center, Dayton, Ohio, 1953. Tech. Rept. 53-384.control function. [8] 0. J. Benepe, G. J. Burke, and R. Narasimham, "Some Prob-
lems in the Spectral Analysis of Human Behavior Records,"4) The human operator has definite thresholds for both Wright Air Dev. Center, Dayton, Ohio, Tech. Rept. 53-27.
input stimuli and feedback stimuli. These signals [9] O. J. Benepe, G. J. Burke, and R. Narasimhan, "The Use ofAutocorrelation Functions in the Harmonic Analysis of Hu-must be relatively strong if linear operation is to man Behavior," Wright Air Dev. Center, Dayton, Ohio, Tech.result. i Rept. 6529; October, 1951.[10] H. P. Birmingham and F. V. Taylor, "A design philosophy
5) The human operator should not be required to func- for man-machine control systems," PROC. IRE, vol. 42, pp. 1748-1758; December, 1954.tion with a bandwidth of, approximately, greater [11] J. S. Brady, "The human operator as an aircraft systems com-than 3 radians/second if reliable and accurate opera- ponent," Aeronaut. Engrg. Rev., vol. 14, pp. 86-90; October,1955.tion is desired. [12] Staff, "Calling in the psychologist early," Business Week,
pp. 80-82; December 20, 1952.6) Human-operator control action can be represented [13] D. C. Cheatham, "A Study of the Characteristic of Human-quite reliably by an equivalent continuous system Pilot Control Response to Simulated Aircraft Lateral Mo-where the transfer-function relating the output signal [14] J. R. ClNarAk, P. M.Piltt9s7,and C. E.Warren,"A elctrnito the actuating signal is apparatus for the study of the human operator in a 1-dimen-sional closed-loop continuous pursuit task," Proc. AIFE,
C(s) 1 [15] ~~~~~~~~~~vol.71, pp. 1-5; 1952.(__)__(_____eT8 (3 [S J. R. Clark, A. B. Fontaine, and C. E. Warren, "A Two-=z + T,s (e8 ,(3 Dimensional Electronic Pursuit Apparatus," Human ResearchE(S) 1 +T"1s Center, Lackland Air Force Base, San Antonio, Tex., Re-
- ~~~~~~~~~searchBull. 52-26; August, 1952.Or, expressed qualitatively in terms of transformed [16] H. Coppock and D. G. Ellson, "Further Analysis of the Psy-quantities, Ohio, Techl. Regpt 6012; AugWus5t, 1951.rDv.Cnes atn
1959 Higgins and Holland: The Human Being as a Link in an Automatic Control System 133
[17] B. J. Covner, "A psychologist views electronic equipment com- [44] -, "Reaction Time for the Amendment of a Response,"plexity," Elec. Engrg., vol. 72, pp. 857-860; October, 1953. Medical Res. Council, Appl. Psych. Res. Unit, The Psycho-
[18] D. R. Craig, "Effect of Amplitude Range on Duration of logical Laboratory, Cambridge, Eng.; January, 1949.Responses to Step Function Displacements," U.S. Air Force, [45] , "Man as an Element in a Control System," Med. Res.Air Material Command, Tech. Rept. 5913; Wright Air Dev. Council, Appl. Psych. Res. Unit, The Psychological Labora-Center, Dayton, Ohio; September, 1949. tory, Cambridge, Eng.; 1951.
[19] M. Cruzen and J. W. Benders, "Tracking Performance on [46] , "On the Rate of Gain of Information," Med. Res.Combined Compensatory and Pursuit Tasks," Wright Air Dev. Council, Appl. Psych. Res. Unit, The Psychological Labora-Center, Dayton, Ohio, Tech. Rept. 52-39; February, 1952. tory, Cambridge, Eng.; October, 1951.
[20] N. Diamantides and R. J. Mead, "Application of Geda to Hu- [47] , "Why the human operator?" Trans. Soc. Instr. Tech.,man Dynamics Studies," Goodyear Aircraft Corp., Rept. GER- vol. 4, pp. 67-77; June, 1952.6608; Akron, Ohio; March 4, 1955. [48] X "A note on one-tailed and two-tailed tests," Psych.
[21] Dunlap and Associates, Inc., "Fitting machines to man." Prod- Rev., vol. 59, pp. 316-318; July, 1952.uct Engrg., vol. 23, pp. 164-167; March, 1952. [49] , "Some features of the after-contraction phenomenon,"
[22] J. I. Elkind, "Tracking Response Characteristics of the Hu- Quart. J. Exper. Psych., vol. 5, pt. 4, pp. 166-170; November,man Operator," Res. Lab. of Electronics, M.I.T., Cambridge, 1953.Mass. [50] A. E. Javitz, "Human engineering in control systems," Elec.
[23] D. G. Ellson and L. Wheeler, Jr., "Resonance in the Human Mfg., vol. 53, pp. 100-113; March, 1954.Operator," Wright Air Dev. Center, Dayton, Ohio, Tech. [51] R. C. Klein, "Analog simulation of sampled-data systems,"Rept. 5834; April, 1951. IRE TRANS. ON TELEMETRY AND REMOTE CONTROL, vol. TRC-
[241 D. G. Ellson and L. Wheeler, Jr., "The Range Effect," U.S. 1, pp. 2-7; May, 1955.Air Force, Air Material Command, Wright-Patterson Air [52] E. S. Krendel, "A Preliminary Study of the Power-SpectrumForce Base, Dayton, Ohio.; Tech. Rept. 5813; May, 1949. Approach to the Analysis of Perceptual-Motor Performance,"
[25] D. G. Ellson and D. R. Craig, "The design of controls," in Wright Air Div. Center, Dayton, Ohio, Tech. Rept. 6723;"Human Factors in Undersea Warfare," Natl. Res. Council, October, 1951.Ottawa, Can., pp. 133-151; 1949. [53] , "The Spectral Density Study of Tracking Perform-
[26] D. G. Ellson, "The application of operational analysis to hu- ance," Wright Air Dev. Center, Dayton, Ohio, Tech. Rept.man motor behavior," Psych. Rev., vol. 56, pp. 9-17; January, 52-11, pts. 1 and 2; January, 1952.1949. [54] , "Notes from the Franklin Institute Laboratories for
[27] D. G. Ellson and F. E. Gray, "Frequency Responses of Human Research and Development," J. Franklin Inst., vol. 253, pp.Operators Following a Sine Wave Input," U.S. Air Force, Air 251-253; March, 1952.Material Command, Memo. Rept. MCREXD-694-2N; Decem.- [55] R. Mayne, "Some engineering aspects of the mechanism ofber 22, 1949. body control," Elec. Engrg., vol. 70, pp. 1-6; March, 1951.
[28] D. G. Ellson and H. Hill, "The Interaction of Responses to [56] J. D. North, "The human transfer function in servo systems,"'Step Function Stimuli: I. Opposed Steps of Constant Ampli- presented at DSIR Conference on Automatic Control, Cran-tude," U.S. Air Force, Air Material Command, Memo. Rept. field, Eng., 1951. Published in "Automatic and Manual Con-MCREXD-694-2P; November 19, 1948. trol," Butterworths Scientific Publications, London, Eng., pp.
[29] G. Finch, "Wave Length and Amplitude Characteristics of 473-501; 1952.Tracking Error Curves," AAF Air Material Command [57] 0. H. Schmitt, "A non-linear approach to biological controlWright-Patterson Air Force Base, Dayton, Ohio; Rept. systems," presented at AIEE Conference on Feedback Con-TSEAA-694-29; April 22, 1947. trol Systems, Atlantic City, N.J.; December 7, 1951.
[30] J. G. Fleming, "Improve power-plant instrumentation by apply- [58] J. W. Senders, "Tracking Performance on Combined Com-ing human-engineering data," Power, vol. 98, pp. 86-89, 206- pensatory and Pursuit Tasks," Wright Air Dev. Center, Day-210; January, 1954. ton, Ohio, Tech Rept. 52-39; February, 1952.
[31] J. G. Fleming, "Human engineering in power plant instrumen- [59] M. G. Spooner and C. H. Weaver, "A study of a force-reflect-tation," presented at the Eighth Natl. Instrument Conf. and ing positional servo-mechanism," Applications and Industry,Exhibit sponsored by the Instrument Society of America, published by AIEE, Paper No. 55-702, pp. 384-387; January,Chicago, Ill.; September 21-25, 1953. 1956.
[32] Fogel, L. J. "Systems engineering for human flight control," [60] E. Stellar, "Human factors in panel design," in "Human Fac-presented at the 25th Anniversary Spring Meeting of the tors in Undersea Warfare," Natl. Res. Council, Ottawa, Can.,American Rocket Society; April 21, 1955. pp. 153-175; 1949.
[331 E. H. Fritze and J. D. Rector, "Combining the automatic pilot [61] C. L. Taylor, "Description and prediction of human responseand the flight director," IRE TRANS. ON AERONAUTICAL AND to aircraft thermal environments," ASME Paper No. 56-AV-NAVIGATIONAL ELECTRONICS, vol. ANE-2, pp. 15-19; Septem- 3; March, 1956.ber, 1955. [62] M. A. Tolcott, "Human engineering in the power plant," pre-
[34] C. B. Gibbs, "The Continuous Regulation of Skilled Response sented at the meeting of the Electrical Equipment Committee ofby Kinaesthetic Feedback," Medical Res. Council, Appl. Psych. the Pennsylvania Electric Association, October 20, 1954.Res. Unit, The Psychological Laboratory, Cambridge, Eng.; [63] J. D. Trimmer, "Measurement as a human activity," Ann. N.Y.March, 1953. Acad. Sci., vol. 60, pp. 829-835; April 30, 1955.
[35] I. Glassman, "A dynamic aircraft simulator for study of hu- [64] , "Some differences between robots and human beings inman response characteristics," IRE TRANS. ON AIRBORNE the process of decision-making," presented at the First Inter-ELECTRONICS, Vol. PGAE-5, pp. 1-6; October, 1952. national Instrument Congress and Exposition, sponsored by
[36] "Investigation of Control 'Feel' Effects on the Dynamics of a the Instrument Society of America, Philadelphia, Pa.; Sep-Piloted Aircraft System," Goodyear Aircraft Corp., Rept. tember 13-23, 1954.GER-6726; April 25, 1955. [65] A. Tustin, "The nature of the operator's response in manual
[37] , "Investigation of Vestibular and Body Reaction to the control, and its implication for controller design," J. IEE,Dynamic Response of a Human Operator," Goodyear Aircraft vol. 94, pt. IIA, pp. 190-207; 1947.Corp., Rept. GER-5452; Akron, Ohio; November, 1953. [66] "Conference with Dr. J. R. Ragazzini on Servo-Analysis as
[38] ' "Final Report Human Dynamics Study," Goodyear Applied to Responses of Human Operators," U.S. Air ForceAircraft Corp., Rept. GER-4750; Akron, Ohio; April 8, 1952. Aero Med. Lab.; MCREXD-694-2K; July, 1948.
[39] J. Greene, "Man as a servo component," Control Engrg., [67] M. A. Vince, "The Intermittency of Control Movements andvol. 1, pp. 58-63; October, 1954. the Psychological Refractory Period," Ministry of Supply,
[40] J. M. Ham and G. Lang, "Conditional feedback systems, a London, Eng., Rept. No. SM6845 (s), DWR(D); 1947.new approach to feedback control," Trans. A]IEE. Paper [68] M. J. Warrick, "Effects of Transmission-Type Control Lagsno. 55-202, presented at the AIEE Winter General 'Meeting, on Tracking Accuracy," U.S. Air Force, Air Material Coin-New York, N.Y.; January 31-February 4, 1955. mand, Wright Air Dev. Center, Dayton, Ohio; Tech. Rept.
[41] K. A. Hayes, "Characteristics of the Human Operator as an 66089; September, 1949.Element in a Closed-Loop Control System," Ministry of Sup- [69] N. Wiener, "Cybernetics or Control and Communication in theply, London, Engl.; W.R. (D) No. 9/53; May, 1953. Animal and the Machine," John Wiley and Sons, Inc., New
[42] J. G. !Henderson, "The human operator regarded as a servo York, N.Y.; 1948.element," Conf. Paper, University of Birmingham, England. [70] D. R. Wilkie, "The circuit analogue of muscle," Electronic
[43] W. E. Hick, "The discontinuous functioning of the human Engrg., vol. XXII, pp. 534-537; October, 1950.Operator in pursuit tasks," QuMart. f. Psych., vol. 1, pp. 36-51; [71] r). T. Williams. "M'an and machine," Battelle Tech. Rev., vol.April, 1948. 4, pp. 3-8; January, 1955.