259 Second Workshop on New Concepts for Far-Infrared and Submillimeter Space Astronomy 8/2/03 The Lunar L1 Gateway Concept: Supporting Future Major Space Science Facilities H. Thronson (NASA HQ), J. Geffre (JSC), S. Prusha (JPL), L. Caroff, C. Weisbin (JPL), the JSC Advanced Design Team, and the JPL Advanced Projects Design Team March 2002 8/2/03 Concepts for Optimized Human/Robotic Support of Advanced Science Facilities The Challenge : Ambitious science facilities, such as post-NGST astronomical telescopes, will be extremely difficult to deploy, construct, rescue, service, and repair in space without sophisticated capabilities for manipulation. Such capabilities might include advanced robots, autonomous or remotely-operated systems, and/or humans on-site. The Goals of This Study : We report here on a series of ongoing studies to evaluate alternative architectures for future space science facilities and how robots, humans, and autonomous systems might be optimally used to support them. This presentation outlines one scenario -- a “Gateway” at the Earth-Moon L1 point for supporting multiple options beyond Low Earth Orbit -- plus our process for evaluating human/robotic activities to construct telescopes. https://ntrs.nasa.gov/search.jsp?R=20040074295 2018-09-01T12:45:56+00:00Z
Transcript
259
Second Workshop on New Concepts for Far-Infrared and Submillimeter Space Astronomy
8/2/03
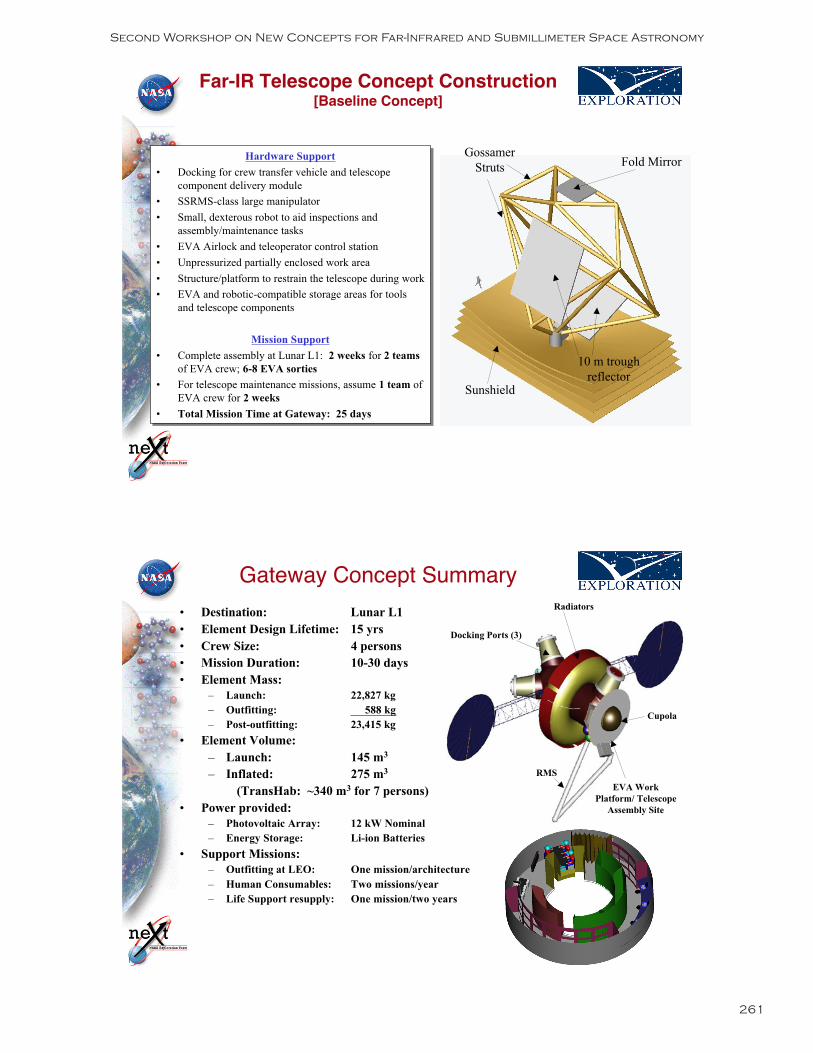
The Lunar L1 Gateway Concept: Supporting Future Major Space Science Facilities
H. Thronson (NASA HQ), J. Geffre (JSC), S. Prusha (JPL),L. Caroff, C. Weisbin (JPL), the JSC Advanced Design
Team, and the JPL Advanced Projects Design TeamMarch 2002
8/2/03
Concepts for Optimized Human/RoboticSupport of Advanced Science FacilitiesThe Challenge :Ambitious science facilities, such as post-NGST astronomicaltelescopes, will be extremely difficult to deploy, construct,rescue, service, and repair in space without sophisticatedcapabilities for manipulation. Such capabilities might includeadvanced robots, autonomous or remotely-operated systems,and/or humans on-site.
The Goals of This Study :We report here on a series of ongoing studies to evaluatealternative architectures for future space science facilities andhow robots, humans, and autonomous systems might beoptimally used to support them.
This presentation outlines one scenario -- a “Gateway” at theEarth-Moon L1 point for supporting multiple options beyond LowEarth Orbit -- plus our process for evaluating human/roboticactivities to construct telescopes.
Second Workshop on New Concepts for Far-Infrared and Submillimeter Space Astronomy
8/2/03
Mars
Gateway Architecture
Crew Transfer Vehicle
•Transports crew between ISSand Gateway (4-6 day trip)
•Nominal return to ISS withcontingency direct Earthreturn
Evaluating the Earth-Moon L1 Point: Options for Exploration Beyond LEO
Moon
L1 Gateway
•“Gateway” to the Lunarsurface
•Outpost for staging missions toMoon, Mars and sciencefacility construction
Earth L2Crew departs
from and returnsto ISS
Siting a human-occupied “Gateway” at the Earth-Moon L1 point has several advantagesin the event that humans are important to support a major in-space science facility:• After construction, such facilities may be transferred to Earth-Sun libration points (orbeyond) with very modest Delta-Vs• Humans may return to Earth relatively quickly in the event of emergency• Long-term habitation at this site may be supported relatively easily from Earth• Capabilities may be developed at this site for longer-term, deeper-space operations whilestill within short travel-time to Earth
In-Depth Quantitative Analysis to Assess Human-RobotOptimization in Future Space Operations
� Relative strengths of humans and robots in performing a wide variety of tasks is well-established CONCEPTUALLY
� Humans are unequaled in unstructured, unpredictable, innovativescenarios
� Robots are best at high-risk access, many repetitive tasks
� There is much EXPERIENCE to validate these general notions� “Rescue” of HST and CGRO, Armstrong’s lunar terminal descent
maneuver, multiple examples on ISS� Robots have gone to “worse-than-hell” places (Venus, Jupiter) not
currently accessible to humans
� Opinions and hunches about the value of humans/robots in space SIGNIFICANTLY EXCEED in-depth study and formal assessment
� Need standardized METRICS to quantify performance� Need rigorously defined criteria to EVALUATE relative performance
263
Second Workshop on New Concepts for Far-Infrared and Submillimeter Space Astronomy
8/2/03
Tools Available for Space Telescope Support
4. Mini-AERCam4. Mission Control
Notional concept for aidingtelescope assembly. Roboticfeatures may include worksitetilt, rotation, and elevationcapabilities.
Dexterous robot controlled via telepresenceequipment. Operator may be IVAcrewmember or Earth-based operator.
Free-flying camera for close-proximity inspection. Controlledby IVA crewmember. Utilizesinert Xenon propulsion system tominimize contamination.
Provides mission support, guidance, andadditional problem solving capability. Maybe used for telerobotic control in conjunctionwith IVA crewmember control.
3. Robonaut Operator
RMS controlled from vehicle interior byIVA crewmember. Also controls RMScameras and Mini-AERCam.
2. RMS Operator
Pairs of astronauts work in conjunction withrobotic agents to assemble space telescopes.Two pairs of two EVA crew assumed onalternating EVAs.
1. EVA Astronaut
3. Assembly Table
Shuttle/Gateway-based roboticarm for worksite support andpayload manipulation
2. Remote ManipulatorSystem (RMS)
Dexterous anthropomorphic robotto complement human assemblyagents. Provides fine motor skills,telerobotically controlled.
1. Robonaut
RobotsHumans
8/2/03
Compute Composite
Scores
“Primitives” [aka, tasks]: Go to Site, Transport Load, Mate Objects . . .
Parameters: EVA duration, transport distance, load mass & size, etc.
Scores per primitivefor each H/R systemoption: data base, thoughtexperiments; models; etc.
Sum of all the task scores:e. g., probability of success forthis H/R option