The model of the procedural simulator for the UAV’s operators training (Модель процедурного тренажеру для підготовки операторів безпілотних літальних апаратів) MINISTRY OF EDUCATION AND SCIENCE OF UKRAINE NATIONAL AVIATION UNIVERSITY Institute of Air Navigation Air Navigation Systems Department MASTER`S DEGREE THESIS Completed by: I.Lutsyk Supervisor: O.Luppo
Transcript
The model of the procedural simulator for the UAV’s operators training
(Модель процедурного тренажеру для підготовки операторів безпілотних літальних апаратів)
MINISTRY OF EDUCATION AND SCIENCE OF UKRAINENATIONAL AVIATION UNIVERSITY
Institute of Air NavigationAir Navigation Systems Department
MASTER`S DEGREE THESIS
Completed by:
I.Lutsyk
Supervisor:
O.Luppo
PurposeThe development of the procedural simulator for the
UAV’s operators training (Flight Plan Programming)
TasksTo analyse the general principles of the unmanned
aircraft systems;To process information about the existing methods of
operators training and methods of flight simulation;To choose an appropriate mathematical model for the
flight programming;To develop a navigational model and the algorithm of
the simulator;To implement the developed models and algorithms
to create procedural simulator 2
3
Navigational scope
4
Motion of the UAV at turn:y
x
S
z
S1
z1
fi1
Xi
YiYi-1
Xi-1
where R - the radius of turn, ω - the angular velocity, g - gravitational acceleration, γ - bank angle, φr - the depth of turn, φ1 - the course at the beginning of turn, φ2 - given course for turn, z1 - coordinate along the axis z, S1 - coordinates along the axis S, t - the time since the beginning of the reversal
5
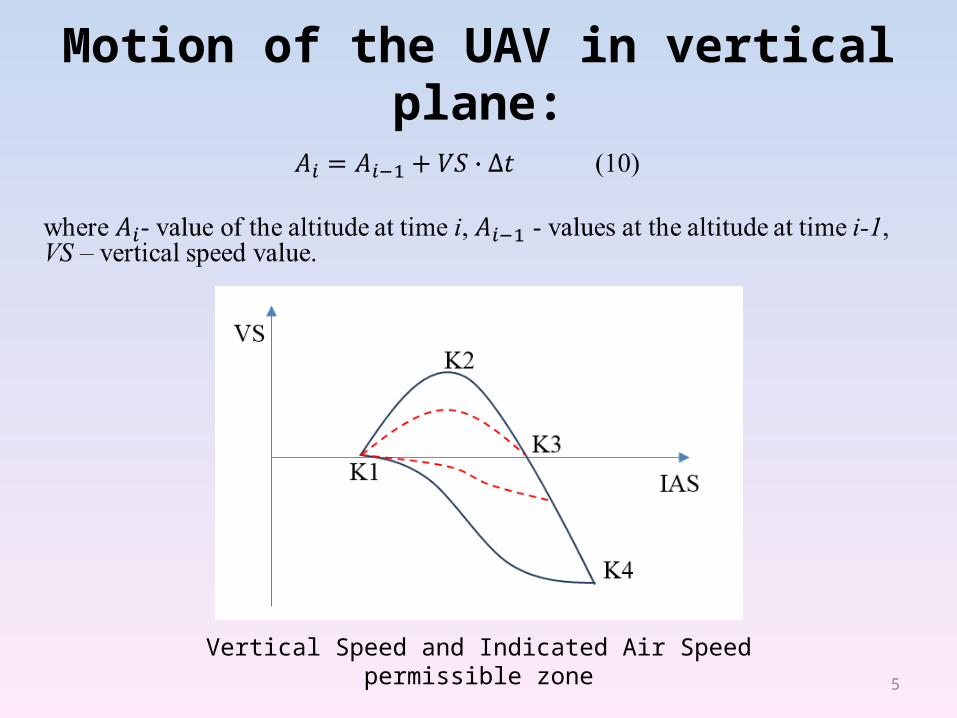
Motion of the UAV in vertical plane:
Vertical Speed and Indicated Air Speed permissible zone
6
Start
HeadingHeading desired
Airspeed
Linear movement?
No
Calculate turn radius;Calculate angle α;Calculate position change;Calculate new X, Y by turn movement formula;Calculate drift for coord. X;Calculate drift for coord. Y;Calculate X, Y with drift;Calculate new heading value;
Calculate coordinate X, Y coordinates value using linear motion equation;Calculate drift for coord. X;Calculate drift for coord. Y;Calculate X, Y with drift;
Yes
Calculate Ground Speed;Calculate Drift angle;
Current headingGround speedDrift angleCoordinates X, Y
End
Algorithm of the coordinates
calculation
7
UAV Simulation block diagram
Human operator
Computer Control panel
Block of flight parameters calculation
8
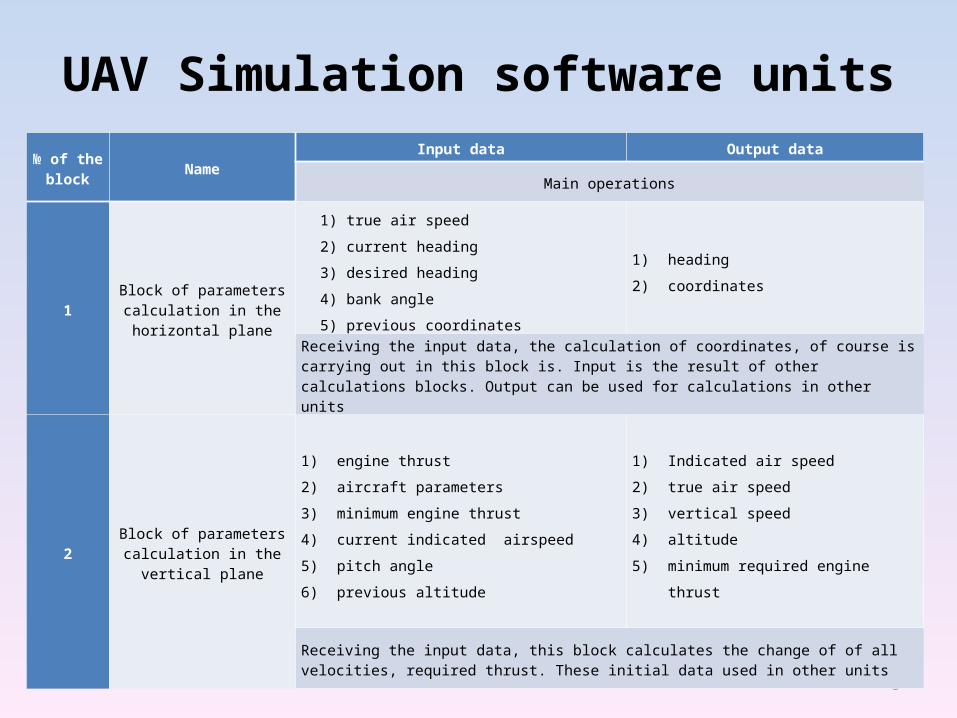
№ of the block
NameInput data Output data
Main operations
1Block of parameters
calculation in the horizontal plane
1) true air speed
2) current heading
3) desired heading
4) bank angle
5) previous coordinates
1) heading
2) coordinates
Receiving the input data, the calculation of coordinates, of course is carrying out in this block is. Input is the result of other calculations blocks. Output can be used for calculations in other units
2Block of parameters
calculation in the vertical plane
1) engine thrust
2) aircraft parameters
3) minimum engine thrust
4) current indicated airspeed
5) pitch angle
6) previous altitude
1) Indicated air speed
2) true air speed
3) vertical speed
4) altitude
5) minimum required engine thrust
Receiving the input data, this block calculates the change of of all velocities, required thrust. These initial data used in other units
UAV Simulation software units
9
Main start window
10
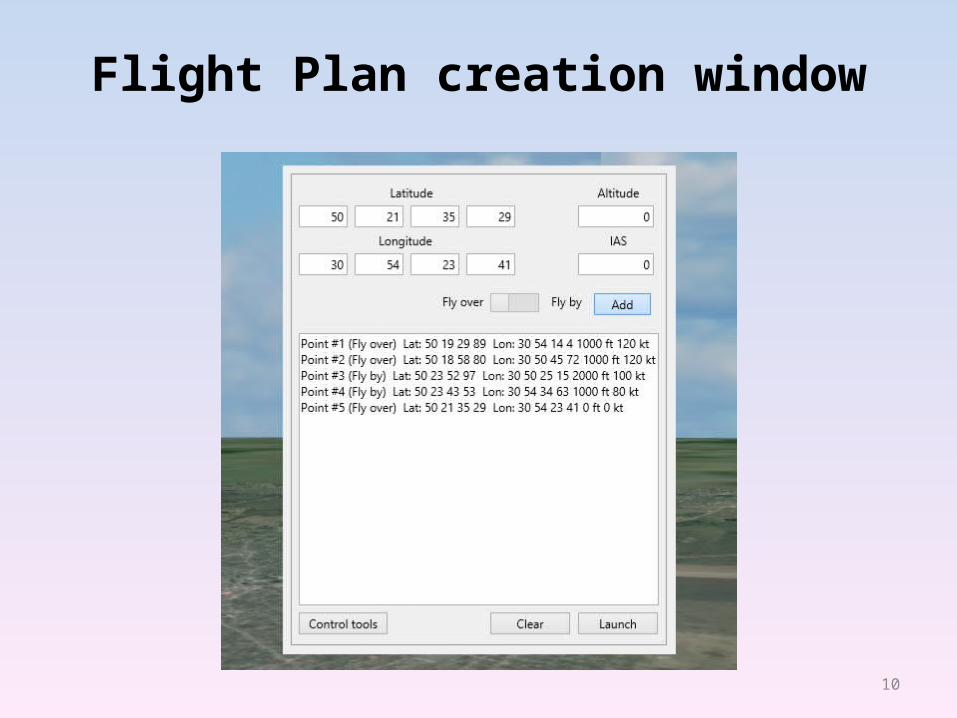
Flight Plan creation window
11
After launch window
Bottom camera manipulation
12
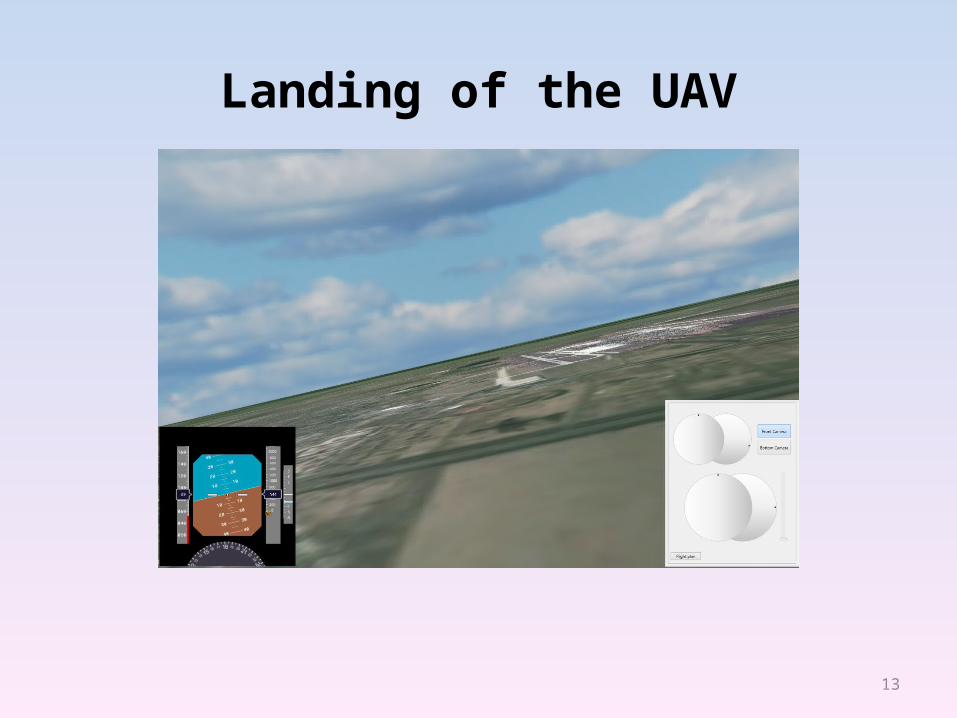
Landing of the UAV
13
14
Conclusions
As a result of the work the model of the procedural simulator for the UAV’s operators training was created. Simulation method used for programming was previously presented at scientific conferences. For further improvement and promotions of practical usage of the developed trainer model the list of recommendations is created.
Recommendations
The simulator may be used in the educational process to study the basic principles of the UAV flight
Developed model of the UAV simulator can be used for future flight simulation projects
15
Approbation of the results1. Proposed UAV simulation method firstly was
represented at the All-Ukrainian competition of student research papers "Aviation and rocket-space equipment. Air Navigation" (02.04.2015).
2. Also there was the participation in XII International Scientific Conference "AVIA 2015" (28.04.2015)