44
Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf Topics • Basics of register-transfer design: – data paths and controllers; – ASM charts. • Pipelining.
| Date post: | 30-Dec-2015 |
| Category: |
Documents |
| Upload: | axel-shepherd |
| View: | 40 times |
| Download: | 1 times |

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Topics
• Basics of register-transfer design:– data paths and controllers;– ASM charts.
• Pipelining.
Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Register-transfer design
• A register-transfer system is a sequential machine.
• Register-transfer design is structural—complex combinations of state machines may not be easily described solely by a large state transition graph.
• Register-transfer design concentrates on functionality, not details of logic design.

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Register-transfer system example
A register-transfer machine has combinational logic connecting registers:
DQ combinationallogic
D QD Q combinationallogic
combinationallogic

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Block diagrams
Block diagrams specify structure: wire bundleof width 5

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Register-transfer simulation
• Simulates to clock-cycle accuracy. Doesn’t guarantee timing.
• Important to get proper function of machine before jumping into detailed logic design. (But be sure to take into account critical delays when choosing register-transfer organization.)

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Simulation coding
• Hardware description languages are typically supported by a simulation system: VHDL, Verilog, etc.– Simulation engine takes care of scheduling events
during simulation.
• Can hand-code a simulation in a programming language.– Must be sure that register-transfer events happen in
proper order.

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Sample VHDL code
sync: process begin
wait until CLOCK’event and CLOCK=‘1’;
state <= state_next;
end process sync;
combin: process begin
case state is
when S0 =>
out1 <= a + c;
state_next <= S1;
...
end process combin;
sync process modelsregisters
combin process modelscombinational logic

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Sample C simulator
while (TRUE) {
switch (state) {
case S0:
x = a + b;
state = S1;
next;
case S1:
...
}
}
loop executed onceper clock cycle
each case correspondsto a state; sets outputs,next state

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Data path-controller systems
• One good way to structure a system is as a data path and a controller:– data path executes regular operations
(arithmetic, etc.), holds registers with data-oriented state;
– controller evaluates irregular functions, sets control signals for data path.
Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Data and control are equivalent
• We can rewrite control into data and visa versa:– control: if i1 = ‘0’ then o1 <= a; else o1 <=
b; end if;– data: o1 <= ((i1 = ‘0’) and a) or ((i1 = ‘1’)
and b);
• Data/control distinction is useful but not fundamental.

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Data operators
• Arithmetic operations are easy to spot in hardware description languages:– x <= a + b;
• Multiplexers are implied by conditionals. Must evaluate entire program to determine which sources of data for registers.
• Multiplexers also come from sharing adders, etc.

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Conditionals and multiplexers
if x = ‘0’ then
reg1 <= a;
else
reg1 <= b;
end if;
code
register-transfer
Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
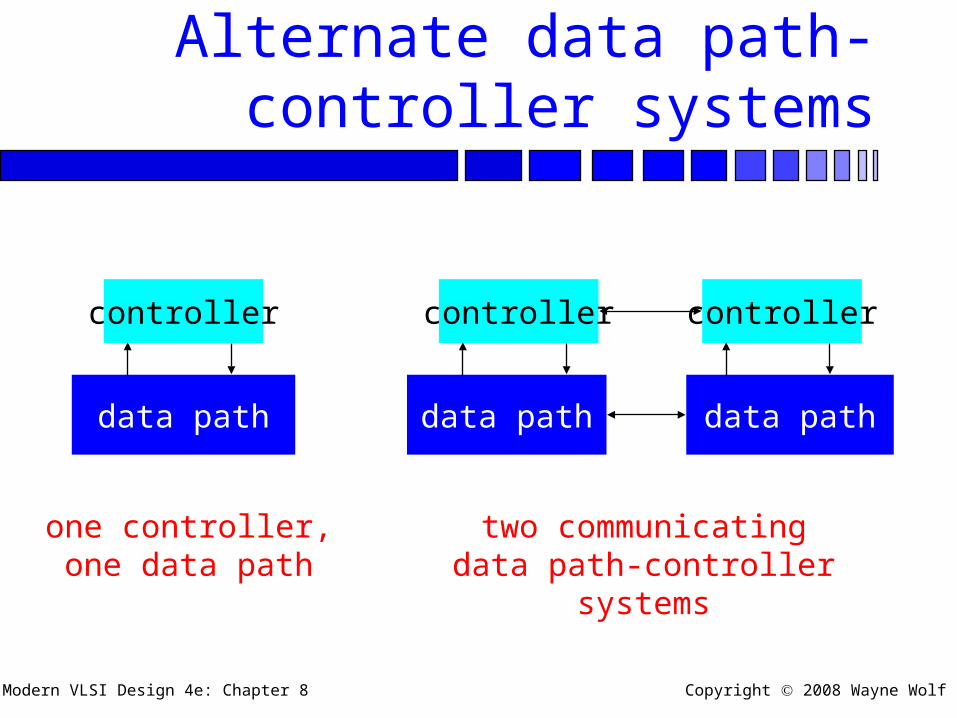
Alternate data path-controller systems
controller
data path
one controller,one data path
controller
data path
controller
data path
two communicatingdata path-controller
systems
Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
ASM charts
• An ASM chart is a register-transfer description.
• ASM charts let us describe function without choosing a partitioning between control and data.
• Once we have specified the function, we can refine it into a block diagram which partitions data and control.

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Sample ASM chart

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
ASM state
• An ASM state specifies a machine state and a set of actions in that state. All actions occur in parallel.
s1 x = a + by = c - d + eo1 = 1
name of state (notation only)

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Actions in state
• Actions in a state are unconditionally executed.
• A state can execute as many actions as you want, but you must eventually supply hardware for all those actions.
• A register may be assigned to only once in a state (single-assignment rule).

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Implementing operations in an ASM state
state with one addition
two additions requires two adders
Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
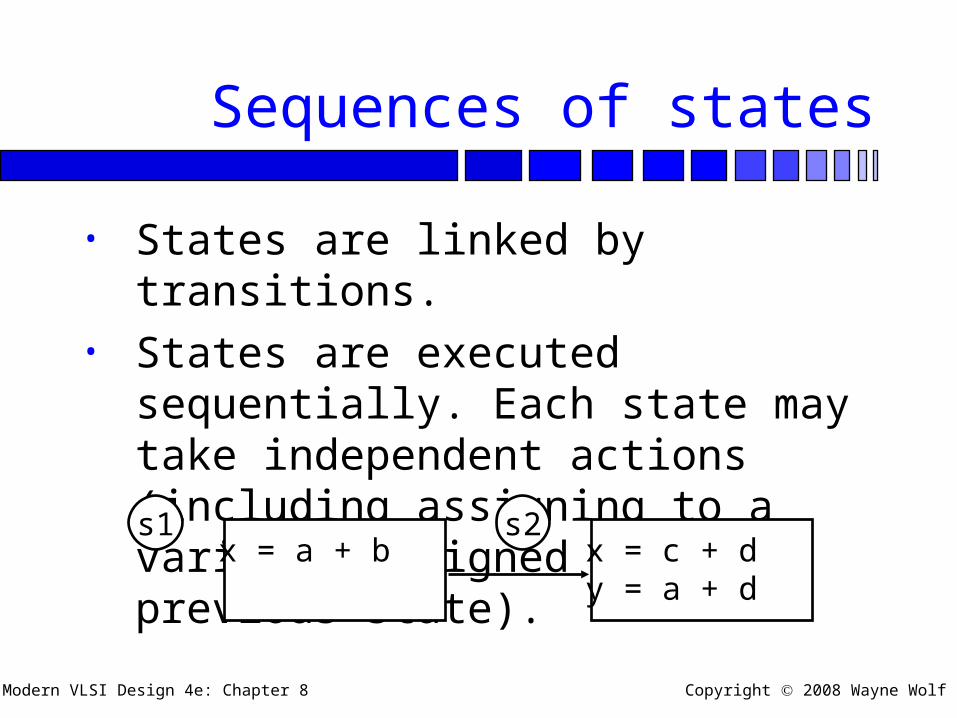
Sequences of states
• States are linked by transitions.• States are executed sequentially. Each state
may take independent actions (including assigning to a variable assigned to in a previous state).
s1x = a + b
s2x = c + dy = a + d

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
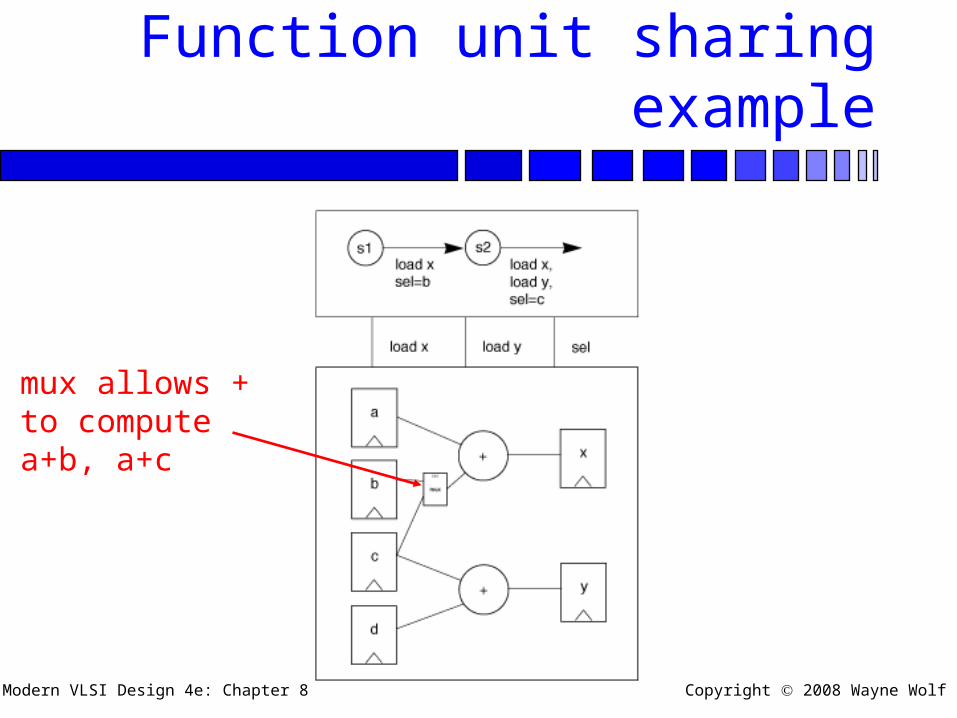
Data paths from states
• Maximum amount of hardware in data path is determined by state which executes the most functionality.
• Function units implementing data operations may be reused across states, but multiplexers will be required to route values to the shared function units.
Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Function unit sharing example
mux allows +to compute a+b, a+c

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Conditionals
• Conditional chooses which state to execute next based on primary input or present state value.
• Can be drawn in either of two ways:
a = bx
00 01 10 11T
F

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
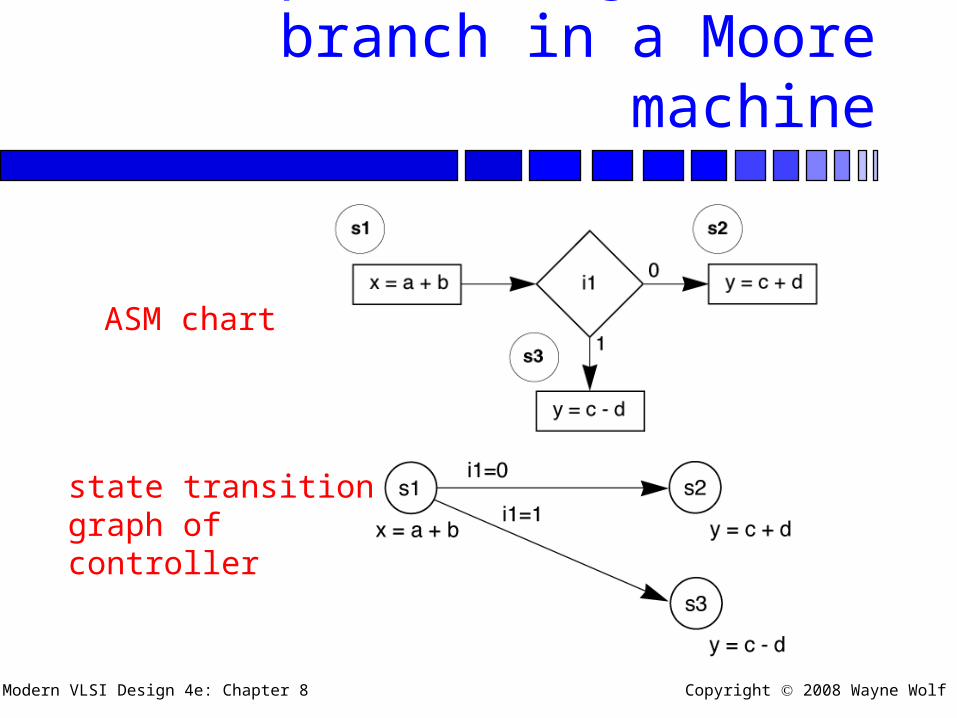
Execution of conditionals
• An ASM chart describes a Moore sequential machine. If the logic associated with an ASM chart fragment doesn’t correspond to a legal sequential machine, then it isn’t a legal ASM chart.
• Conditional can evaluate only present state or primary input value on present cycle.
Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Implementing an ASM branch in a Moore machine
ASM chart
state transitiongraph ofcontroller
Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
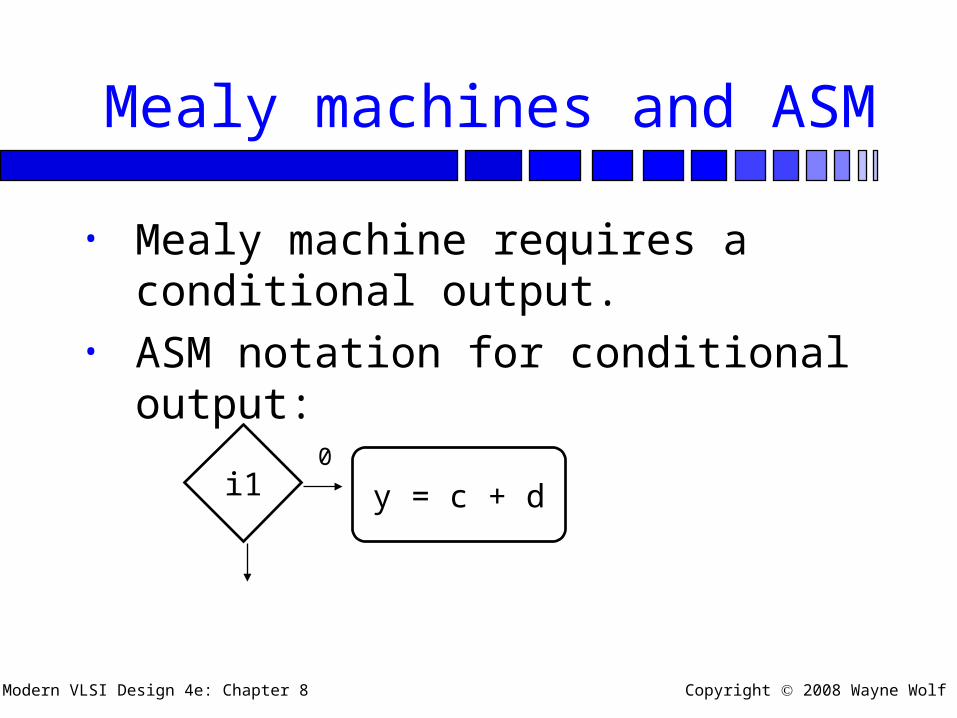
Mealy machines and ASM
• Mealy machine requires a conditional output.
• ASM notation for conditional output:
i10
y = c + d

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
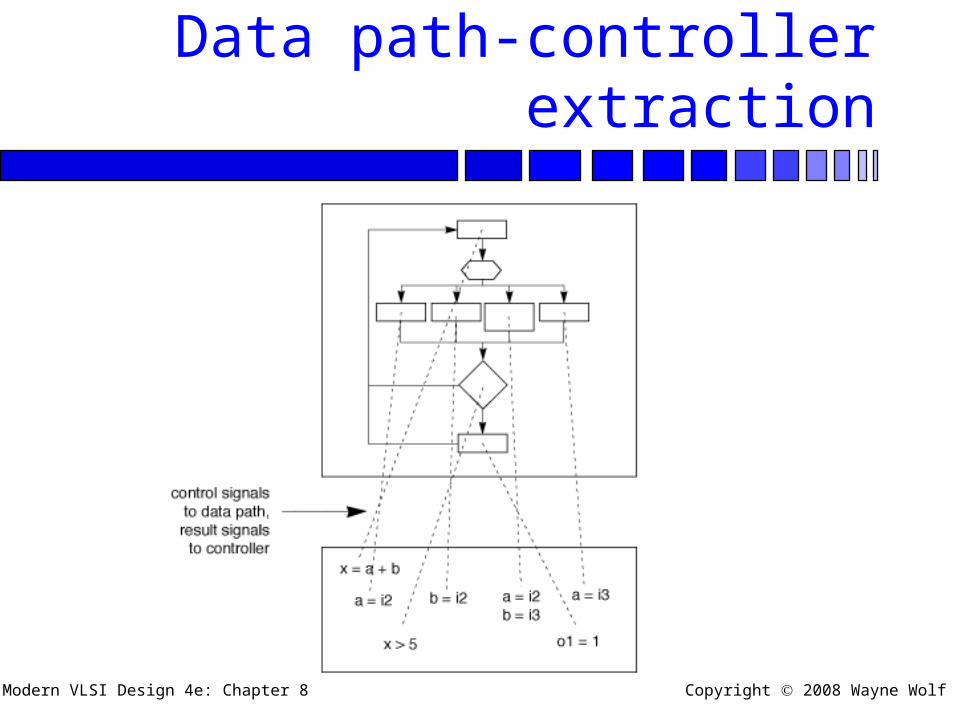
Extracting data path and controller
• ASM chart notation helps identify data, control.
• Once you choose what values and operations go into the data path, you can determine by elimination what goes into the controller.
• Structure of the ASM chart gives structure of controller state transition graph.
Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Data path-controller extraction
Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
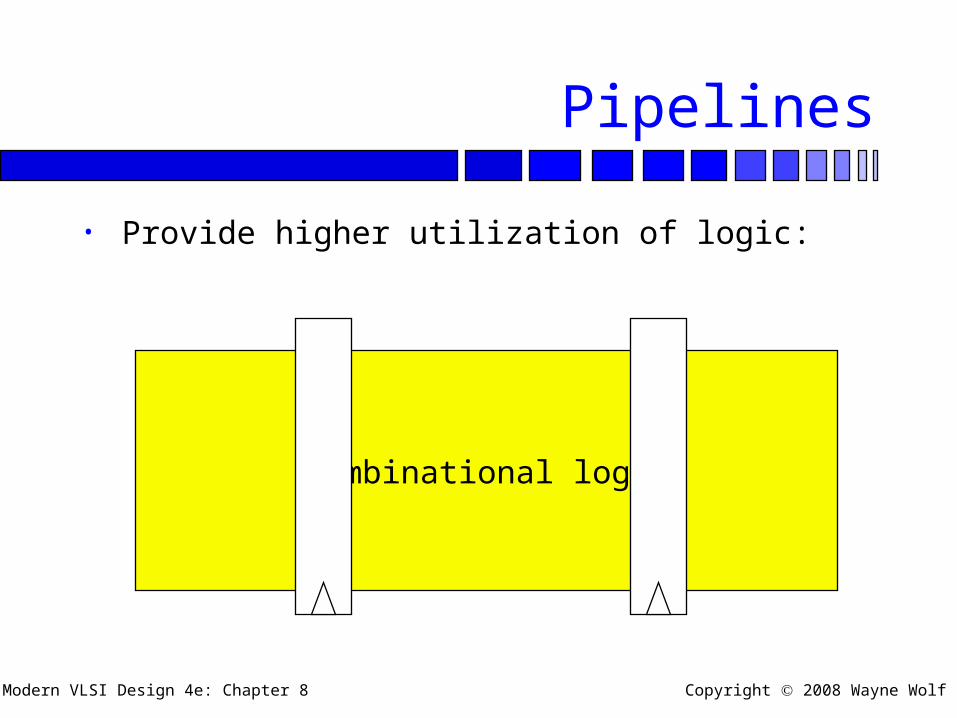
Pipelines
• Provide higher utilization of logic:
Combinational logic
Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
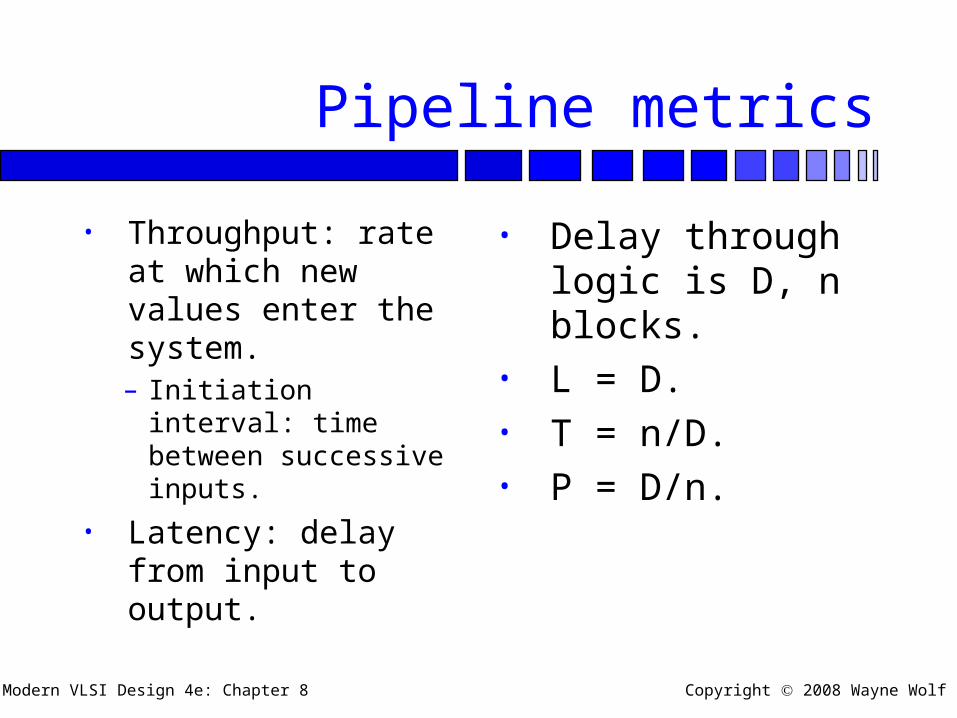
Pipeline metrics
• Throughput: rate at which new values enter the system.– Initiation interval: time
between successive inputs.
• Latency: delay from input to output.
• Delay through logic is D, n blocks.
• L = D.• T = n/D.• P = D/n.

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Clock period and throughput vs. pipeline depth

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Simple pipelines
• Pure pipelines have no control.• Choose latency, throughput.• Choose register locations with retiming.• Overhead:
– Setup, hold times.– Power.

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Pipelining registers

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Bad cutset for pipelining

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Utilization
• Must fill, drain pipe at start and end of computation.
• Given D cycles of data, n-stage pipe:– U = D/(D+n)

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
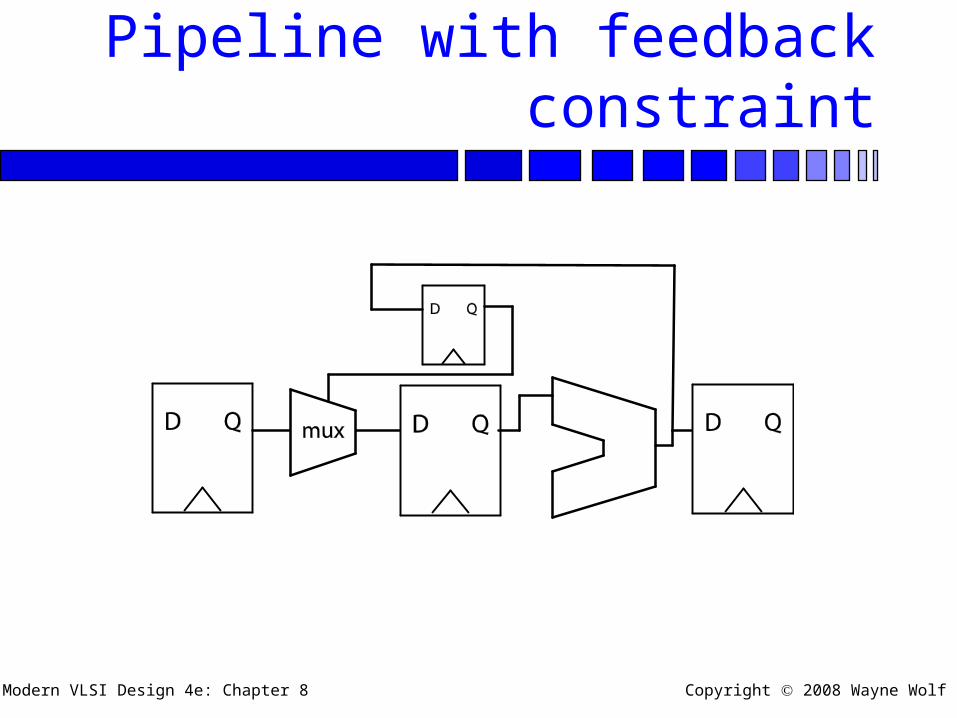
Complex pipelines
• Actions in pipeline depend on data or external events.
• Data dependencies may be forward or backward.
• Actions on pipe:– Stall values.– Abort operation.– Bypass values.

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Pipeline with feedforward constraint
Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Pipeline with feedback constraint
Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
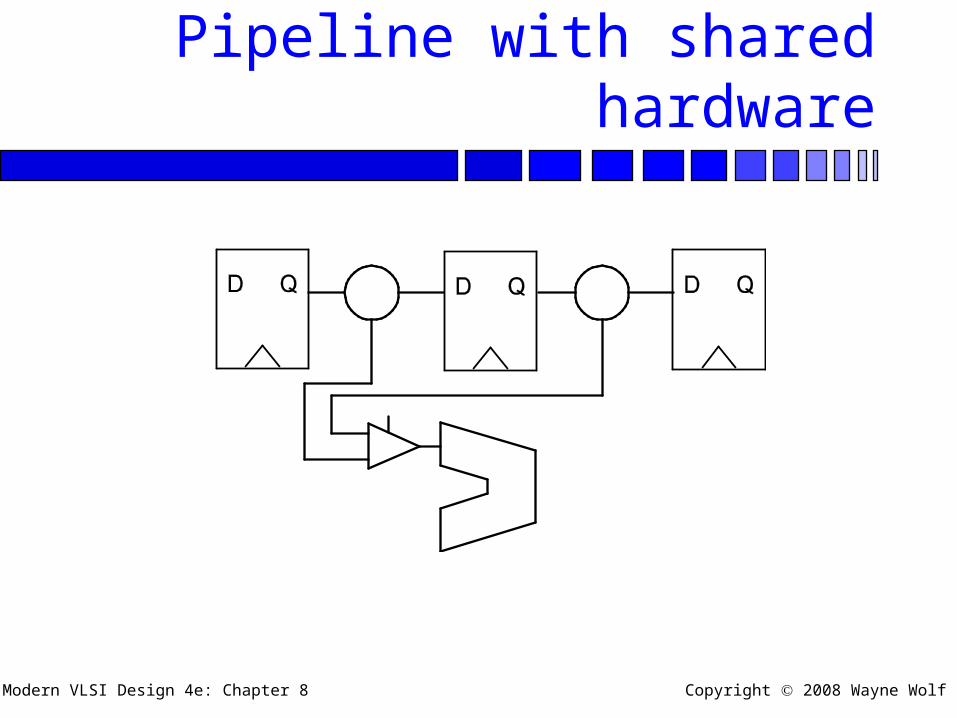
Pipeline with shared hardware

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
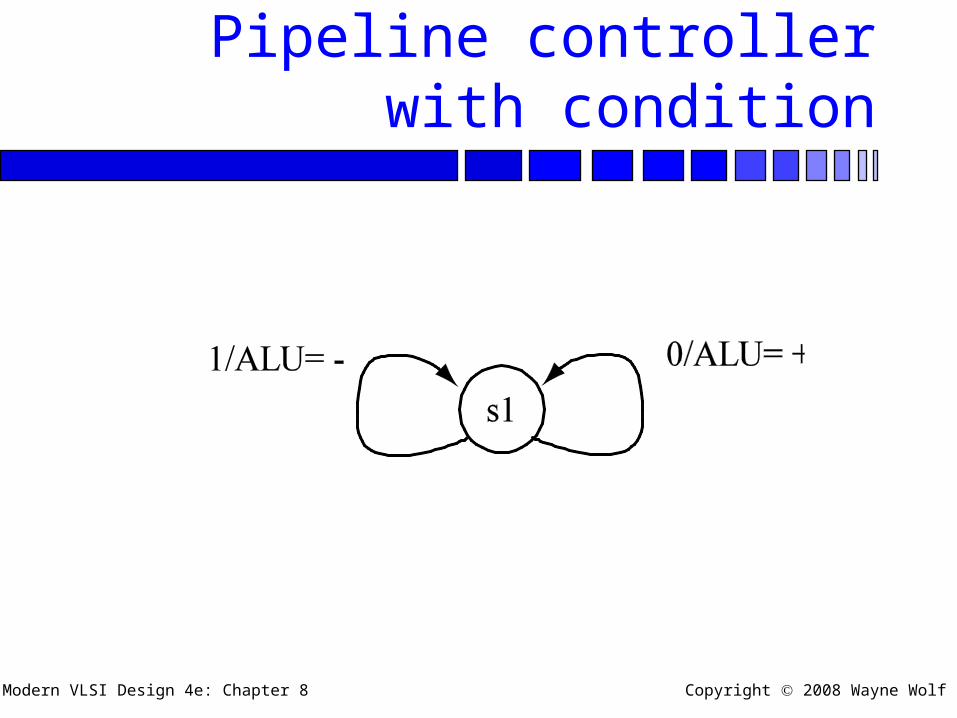
Pipeline control
• Controllers are necessary when pipe stages take conditions.
• Unconditional pipe stage controller has one state, one transition.

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
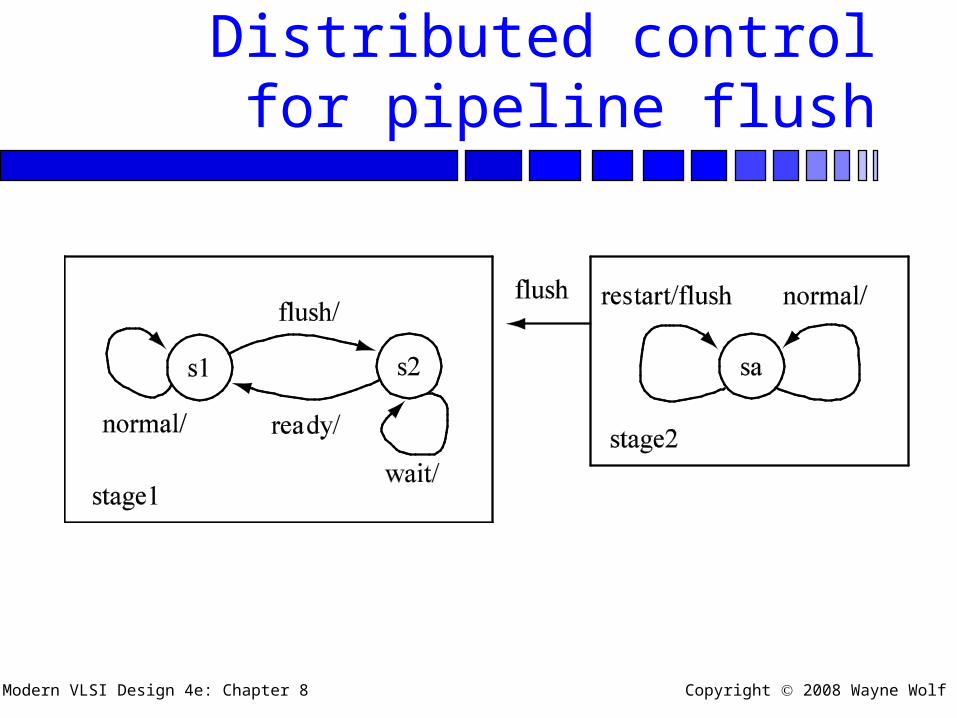
Pipeline with distributed control
Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Pipeline controller with condition
Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Distributed control for pipeline flush

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Control for hardware sharing

Modern VLSI Design 4e: Chapter 8 Copyright 2008 Wayne Wolf
Product machine for distributed control
• Distributed control is hard to verify because state is not centralized.
• Product machine form identifies global control actions.
• Can verify using symbolic simulation, model checking.

















