Page 1
October 9, 2016
Qiaoyong Zhong, Chao Li, Yingying Zhang, Haiming Sun
Shicai Yang, Di Xie, Shiliang Pu
{zhongqiaoyong, sunhaiming, yangshicai, xiedi}@hikvision.com
Hikvision Research Institute
Towards Good Practices for Recognition & Detection
Page 2
Team Members
Scene Classification:
• Shicai Yang
Scene Parsing:
• Haiming Sun
• Di Xie
DET + LOC:
• Qiaoyong Zhong
• Chao Li
• Yingying Zhang
• Di Xie
2
Page 3
Summary of Our Submissions
• Scene Classification
– 1st place, 0.0901 top5 error
• Scene Parsing
– 7th place, 0.53335 average mIoU & pixel accuracy
• Object Detection
– 2nd place, 0.653 mAP
• Object Localization
– 2nd place, 0.0874 localization error
3
Page 4
Scene Classification
• Data Augmentation
– Color Augmentation (directly adopted from [1])
– PCA Jittering (from [2])
– Random Image Interpolation
– Crop Sampling • scale jittering (from [3][4])
• scale and aspect ratio augmentation (from [5])
– random area ratio (a = [0.08, 1])
– random aspect ratio (s = [3/4, 4/3])
– crop size: W’ = sqrt(W*H*a*s); H’ = sqrt(W*H*a/s)
– random offset to pick crop center, then crop and resize
• Supervised Data Augmentation
4
[1] https://github.com/facebook/fb.resnet.torch/
[2] A. Krizhevsky, et al. ImageNet Classification with Deep Convolutional Neural Networks. NIPS, 2012.
[3] K. Simonyan, et al. Very Deep Convolutional Networks for Large-Scale Image Recognition. ICLR, 2015.
[4] K. He, et al. Deep Residual Learning for Image Recognition. CVPR, 2016.
[5] C. Szegedy, et al. Going Deeper with Convolutions. CVPR, 2015.
Page 5
Scene Classification
• Supervised Data Augmentation (SDA) – train a model from scratch (coarse model)
– use coarse model to generate ground truth class activation
– randomly select a location based on prob. of target class
– map this location to original image
– randomly select a crop center near that location in original image
– other steps are similar with the method in GoogLeNet paper
5
Inspired by: [6] B. Zhou, et al. Learning Deep Features for Discriminative Localization. CVPR, 2016.
image
(ground truth: wind_farm) ground truth class activation
1x1
conv classifier
…
pool
wind_farm
Page 6
Scene Classification
• Supervised Data Augmentation (SDA) – train a model from scratch (coarse model)
– use coarse model to generate ground truth class activation
– randomly select a location based on prob. of target class
– map this location to original image
– randomly select a crop center near that location in original image
– other steps are similar with the method in GoogLeNet paper
6
Randomly Selected Crop:
Original (in red)
SDA (in green)
Inspired by: [6] B. Zhou, et al. Learning Deep Features for Discriminative Localization. CVPR, 2016.
Page 7
Scene Classification
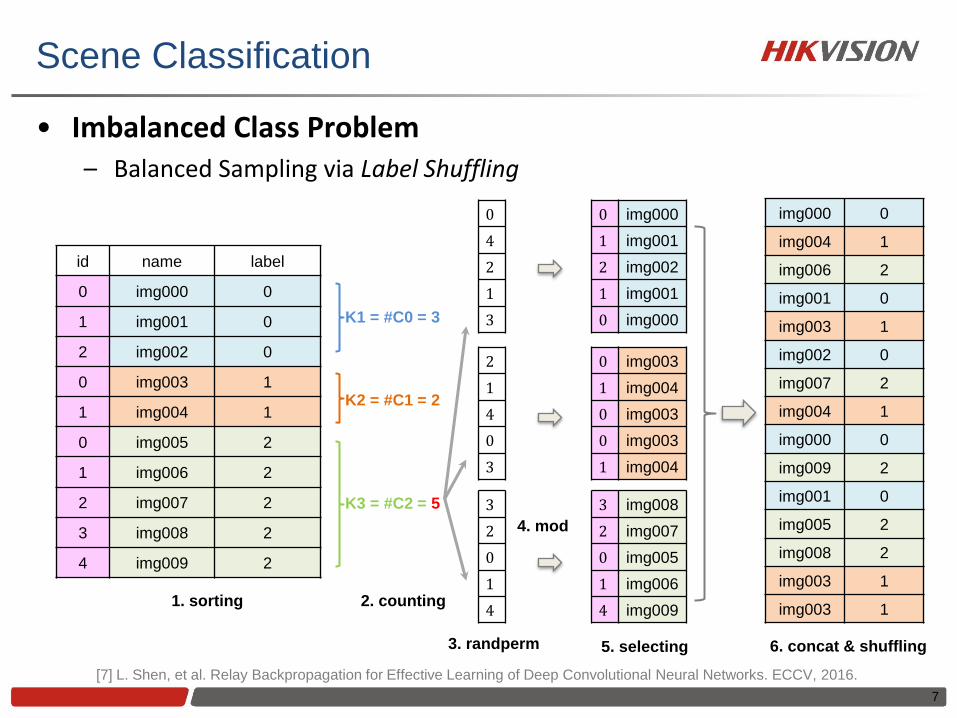
• Imbalanced Class Problem – Balanced Sampling via Label Shuffling
7
[7] L. Shen, et al. Relay Backpropagation for Effective Learning of Deep Convolutional Neural Networks. ECCV, 2016.
id name label
0 img000 0
1 img001 0
2 img002 0
0 img003 1
1 img004 1
0 img005 2
1 img006 2
2 img007 2
3 img008 2
4 img009 2
K1 = #C0 = 3
K2 = #C1 = 2
K3 = #C2 = 5
0
4
2
1
3
0 img000
1 img001
2 img002
1 img001
0 img000
2
1
4
0
3
0 img003
1 img004
0 img003
0 img003
1 img004
3
2
0
1
4
3 img008
2 img007
0 img005
1 img006
4 img009 1. sorting 2. counting
3. randperm
4. mod
5. selecting 6. concat & shuffling
img000 0
img004 1
img006 2
img001 0
img003 1
img002 0
img007 2
img004 1
img000 0
img009 2
img001 0
img005 2
img008 2
img003 1
img003 1
Page 8
Scene Classification
• label smoothing (LS) via prior label distribution
8
[8] C. Szegedy, et al. Rethinking the Inception Architecture for Computer Vision. CVPR, 2016.
0 0 0 0 0 0 1 0 0 0 0 … 0
𝜀/𝐾 𝜀/𝐾 𝜀/𝐾 𝜀/𝐾 𝜀/𝐾 𝜀/𝐾 1 − 𝜀 + 𝜀/𝐾 𝜀/𝐾 𝜀/𝐾 𝜀/𝐾 𝜀/𝐾 … 𝜀/𝐾
𝜀/𝐾 𝜀/𝐾 𝜏/4 𝜀/𝐾 𝜏/4 𝜏/4 1 − 𝜏 − 𝜀 𝜀/𝐾 𝜏/4 𝜀/𝐾 𝜀/𝐾 … 𝜀/𝐾
Hard Label
Original LS
Proposed LS
labels of similar classes used for label smoothing
Co-label
Similarity
Top 4
Similar
Labels
Page 9
Scene Classification
• Train and Test in Harmony – train in the same way as you test
• remove augmentation for the last several epochs (+0.3%)
– test in the same way as you train
• test 32 random crops from scale and ratio augmentation (+0.3%)
– multi-scale testing over multi-scale training
– use checkpoints from the middle of training to avoid overfitting (+0.3%)
9
299/
299
299/
336
331/
360
299/
299
363/
400
Single
Model
Ensemble
train
test
Page 10
Scene Classification
• Models
– Inception v3/Inception ResNet v2, and their variants
– Wider ResNet with 50/64 layers
• Results
10
9.01 10.19 10.3 10.43 10.85 10.93
0
10
20
top
5 e
rr
Page 11
Scene Parsing
11
1×1 conv
MCN block
MCN block
MCN block
MCN block
MCN block
upsample
Mixed Context Network
+
3×3 conv
3×3 dilated conv
concat
1×1 conv
1×1 conv
input
output
concat
1×1 conv
1×1 conv
1×1 conv
3×3 conv
3×3 convupsample
concat 1×1 conv
upsample
Message
Passing
Network
overall architecture for scene parsing
Page 12
Scene Parsing
12
score map S(0)
score map S(i)
permutohedral conv
score map S(i+1)
permutohedral conv
Concat
1×1 conv
softmax
eltwise
score map S(0)
score map S(i)
permutohedral conv
score map S(i+1)
1×1 conv
Concat
3×3 conv
eltwise
CRF as RNN Message Passing Network
Page 13
Parsing Results
13
images ground truths our results
Page 14
Object Detection Elements
Identity Mapping
ResNet-101 Variants
Cascade RPN
Constrained Neg/Pos
Anchor Ratio
RPN Proposal
Testing Tricks
Multi-Scale Testing
HFlip Box Voting
Training Tricks
Multi-Scale Training
OHEMBalanced Sampling
Pretrained Global
Context
Pretraining
Pretrain on LOC
14
Page 15
Cascade RPN
Conv4
Conv3x3
RPN 2RPN 1Sliding
Window Anchors
Proposals
Conv3x3
Refined Proposals
15
Page 16
Constrained NEG/POS Anchor Ratio
• Naïve RPN
• Batch size: 256
• Expected N/P ratio: 1
• Real N/P ratio: usually > 10
• Our RPN
• Min batch size: 32
• Max N/P ratio: 1.5
Ablation Study
Cascade RPN
Constrained N/P
[email protected] 91.0 91.2 92.0 91.9
[email protected] 70.2 77.9 74.0 79.7
Average Recall 52.5 57.2 54.6 57.9
5.4 AR gain 9.5 [email protected] gain
16
Page 17
Pre-trained Global Context
Conv
RoI Features
...
RoIPooling
Global Features
RoIPooling
Conv
...
Concat
Softmax Classification
BBox Regression
3.8 mAP gain over baseline!
17
Page 18
Pre-training on LOC
0.5 mAP gain over baseline!
18
Page 19
Dog
Person
Class list
...
Person list
…
Dog list
…
Balanced Sampling
• Adapted from Shen et al. [7] for detection task
0.7 mAP gain on VOC2007
[7] L. Shen, et al. Relay Backpropagation for Effective Learning of Deep Convolutional Neural Networks. ECCV, 2016.
19
Page 20
Performance
• ImageNet DET
• ImageNet CLS-LOC
• PASCAL VOC2012
Team mAP Rank
Hikvision 87.9 1
ResNet Baseline 83.8 2
Team mAP Rank
Single Model Hikvision 63.40 1
CUImage 63.36 2
Ensemble CUImage 66.3 1
Hikvision 65.3 2
CLS LOC Rank
LOC (Ensemble) 3.7 8.7 2
20
Page 21
Take Home Message
• Scene Classification – better utilize your data and model (SDA) – label smoothing via soft label – balanced sampling via label shuffling – train and test in harmony
• Scene Parsing – Mixed Context Net & Message Passing Net
• Object Detection – use identity mapping – cascade RPN – constrained NEG/POS anchor ratio – pre-trained global context – balanced sampling
• Object Localization – LOC = CLS + DET
21
Page 22
Acknowledgments
• We would like to thank our HPC team:
– Peng Wang
– Jianfeng Peng
– Xing Zheng
– Zhiqiang Zhou
– etc…
22