Two-stage nonlinear detector in DS/SSMA communications with impulse noise J.F.Weng S.H. Leung W.IH. Lau G.G.Bi Indexing terms: Near-fur effect, Synchronous detection, Spread spectrum communications Abstract: A new two-stage nonlinear detector for 2;ynchronous DSISSMA communications in impulsive channels is presented and analysed. In the detector, an interference cancellation scheme is used such that the effect of the multiple-access interference on the system performance can be alleviated. For a multiuser system with long spreading sequences an approximate error probability is derived and shows that the new detector is insensitive to the ‘near-far’ effect and gives a near-single-user performance. For cases with short spreading sequences Monte-Carlo simulation is carried out to estimate the error probability and the results show that the detector performs robustly in various mixtures of noise. 1 Introduction In most practical direct-sequence spread-spectrum mul- tiple-access (DSISSMA) communications, apart from the well known multiple-access (MA) interference, the noiise can be generated by a variety of natural and man-made electromagnetic sources such that it exhibits ‘im;pulsive’ characteristics and can cause a seriously detrimental effect on the system performance [ 1-51. Since the use of the optimum detector in terms of underlying noise distributions is not practical, a lot of suboptimum detectors have been proposed [6, 71. It has been shown that a smooth-limiting nonlinear correlator can provide good performance over the linear receiver. However, the performance of the nonlinear correlator is slhown to be sensitive to the near-far effect caused by MA interference. On the other hand, to remedy the near-far problem, interference cancellation scheme has been so far presented and shown to perform well in mitigating the interference and to provide a near single- user performance [8-111. Unfortunately, in the presence of j.mpulse noise, even the single-user bound of linear 0 IE:E, 1997 IEE Proceedings online no. 19971505 Paper first received 23rd April 1996 and in revised form 25th February 1997 J.F. Weng, S.H. Leung and W.H. Lau are with the Department of Elec- tronic Engineering, City University of Hong Kong, 83 Tat Chee Ave, Kowloon, Hong Kong G.G. Bi is with the Department of Radio Engineering, Southeast Univer- sity, Nanjing 20018, People’s Republic of China detector will be drastically degraded. Hence, there is a need to exploit a robust receiver to work effectively against both MA interference and impulse noise. This paper presents and analyses a new two-stage nonlinear detector for the joint suppression of MA interference and impulse noise. In this detector, MA interference is estimated and reconstructed in the first stage and subtracted from the composite received sig- nal in the second stage, where a nonlinear correlator is used for signal detection. 2 Preliminaries In a synchronous binary PSK DSISSMA system with K users, suppose the receiver of interest is the first user. The received signal, after demodulation and being sam- pled at the chip rate UT,, is denoted by V() and for t E [mTb, (m + l)Tb] it is written as K k=l j = 0,1,. . . , N - 1 where 19~ = d(’IzE(kd/Tb) T, is the signal amplitude of the kth user, E(!) is the bit energy, Tb is the bit dura- tion and Tc the chip duration, and Tb = NT, for the spreading sequence of length N. bE) E {-1, l} is the mth data bit, U?) E {-1, 1) denotes the PN codes assigned to the kth user and also U‘,”’ = u‘,”’~ for allj and k, and I(!) denotes MA interference at the instant jT, and is given by U k=2 In eqn. 1, qj denotes the noise component in the base- band. We assume that qj is independent and identically distributed (IID) with zero mean and variance NoTc14. An &-mixture model is commonly used to characterise qj owing to its mathematical tractability [5, 6, -12, 131. Here, the probability density function (PDF) of qj in [6] is adopted and given by f?13 ( . ) = (1 - E)fn(Z) + &fI(.) (3) where E E [0, 11 is the probability that an impulse occurs at the sampling time,fn(x) is taken to be a gaus- sian PDF with the nominal variance CT~, fix) is the PDF to reflect the impulsive characteristic of the impulse noise. Several PDFs, such as gaussian, 387 IEE Pro,.-Commun., Vol. 144, No. 6, December 1997
Transcript
Two-stage nonlinear detector in DS/SSMA communications with impulse noise
Abstract: A new two-stage nonlinear detector for 2;ynchronous DSISSMA communications in impulsive channels is presented and analysed. In the detector, an interference cancellation scheme is used such that the effect of the multiple-access interference on the system performance can be alleviated. For a multiuser system with long spreading sequences an approximate error probability is derived and shows that the new detector is insensitive to the ‘near-far’ effect and gives a near-single-user performance. For cases with short spreading sequences Monte-Carlo simulation is carried out to estimate the error probability and the results show that the detector performs robustly in various mixtures of noise.
1 Introduction
In most practical direct-sequence spread-spectrum mul- tiple-access (DSISSMA) communications, apart from the well known multiple-access (MA) interference, the noiise can be generated by a variety of natural and man-made electromagnetic sources such that it exhibits ‘im;pulsive’ characteristics and can cause a seriously detrimental effect on the system performance [ 1-51. Since the use of the optimum detector in terms of underlying noise distributions is not practical, a lot of suboptimum detectors have been proposed [6, 71. It has been shown that a smooth-limiting nonlinear correlator can provide good performance over the linear receiver. However, the performance of the nonlinear correlator is slhown to be sensitive to the near-far effect caused by MA interference. On the other hand, to remedy the near-far problem, interference cancellation scheme has been so far presented and shown to perform well in mitigating the interference and to provide a near single- user performance [8-111. Unfortunately, in the presence of j.mpulse noise, even the single-user bound of linear 0 IE:E, 1997 IEE Proceedings online no. 19971505 Paper first received 23rd April 1996 and in revised form 25th February 1997 J.F. Weng, S.H. Leung and W.H. Lau are with the Department of Elec- tronic Engineering, City University of Hong Kong, 83 Tat Chee Ave, Kowloon, Hong Kong G.G. Bi is with the Department of Radio Engineering, Southeast Univer- sity, Nanjing 20018, People’s Republic of China
detector will be drastically degraded. Hence, there is a need to exploit a robust receiver to work effectively against both MA interference and impulse noise.
This paper presents and analyses a new two-stage nonlinear detector for the joint suppression of MA interference and impulse noise. In this detector, MA interference is estimated and reconstructed in the first stage and subtracted from the composite received sig- nal in the second stage, where a nonlinear correlator is used for signal detection.
2 Preliminaries
In a synchronous binary PSK DSISSMA system with K users, suppose the receiver of interest is the first user. The received signal, after demodulation and being sam- pled at the chip rate UT,, is denoted by V() and for t E [mTb, (m + l ) T b ] it is written as
K
k = l
j = 0,1,. . . , N - 1 where 19~ = d(’IzE(kd/Tb) T, is the signal amplitude of the kth user, E(!) is the bit energy, Tb is the bit dura- tion and Tc the chip duration, and Tb = NT, for the spreading sequence of length N. bE) E {-1, l } is the mth data bit, U?) E {-1, 1 ) denotes the PN codes assigned to the kth user and also U‘,”’ = u‘, ” ’~ for a l l j and k, and I(!) denotes MA interference at the instant jT, and is given by
U
k=2
In eqn. 1, qj denotes the noise component in the base- band. We assume that qj is independent and identically distributed (IID) with zero mean and variance N o T c 1 4 . An &-mixture model is commonly used to characterise qj owing to its mathematical tractability [5, 6, -12 , 131. Here, the probability density function (PDF) of qj in [6] is adopted and given by
f?13 (.) = (1 - E)fn(Z) + &fI(.) (3) where E E [0, 11 is the probability that an impulse occurs at the sampling time,fn(x) is taken to be a gaus- sian PDF with the nominal variance C T ~ , f i x ) is the PDF to reflect the impulsive characteristic of the impulse noise. Several PDFs, such as gaussian,
387 IEE Pro,.-Commun., Vol. 144, No. 6, December 1997
Laplace, and Cauchy can be used for characterising f i x ) . Here, considerfix) as a gaussian PDF but with a much larger variance 0:. The ratio of these two vari- ances is defined by f = ~$0," and assumed to take the value of 10 and 100. Hence, the variance of 7 7 ~ can be written as 0; = (1 - E ) O ~ + ED?, which equals NoT,/4 for a given SNR value. The signal-to-noise ratio of the kth user (SNR#k) is defined by E(i)INo. Usually in impulsive channels the shape, not merely the variance, of the distribution is an important factor on the system performance. To study its effects we vary the parame- ters E and while the total noise variance or: is held constant.
It can be shown that for IID impulse noise the test statistic for detection is generally nonlinear. However, the performance of nonlinear correlator is shown to be sensitive to MA interference. To overcome this weak- ness we introduce a two-stage nonlinear detector.
3 Two-stage nonlinear detector
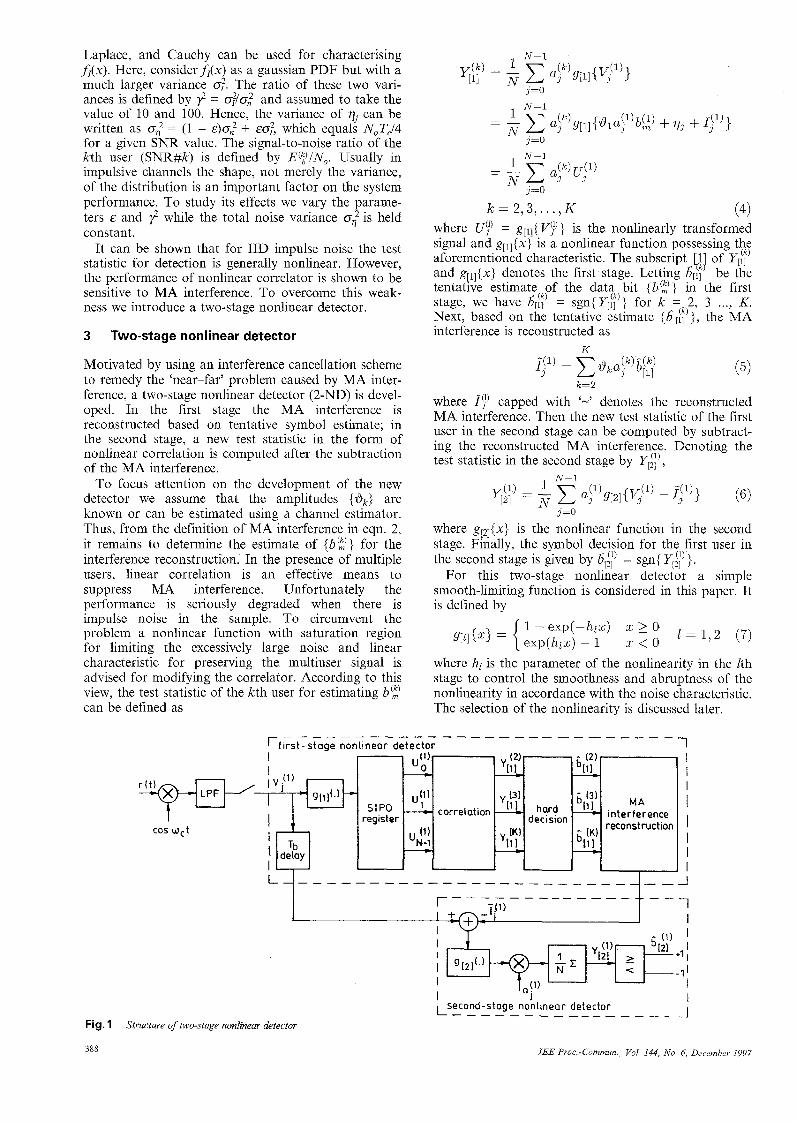
Motivated by using an interference cancellation scheme to remedy the 'near-far' problem caused by MA inter- ference, a two-stage nonlinear detector (2-ND) is devel- oped. In the first stage the MA interference is reconstructed based on tentative symbol estimate; in the second stage, a new test statistic in the form of nonlinear correlation is computed after the subtraction of the MA interference.
To focus attention on the development of the new detector we assume that the amplitudes {ek} are known or can be estimated using a channel estimator. Thus, from the definition of MA interference in eqn. 2, it remains to determine the estimate of { b t ) } for the interference reconstruction. In the presence of multiple users, linear correlation is an effective means to suppress MA interference. Unfortunately the performance is seriously degraded when there is impulse noise in the sample. To circumvent the problem a nonlinear function with saturation region for limiting the excessively large noise and linear characteristic for preserving the multiuser signal is advised for modifying the correlator. According to this view, the test statistic of the kth user for estimating b:) can be defined as
- N-l
3=0
N-l 1 N
- - (1)
k = 2,3, ..., K
% -
j=0
(4) where Uy' = grl1{ Vf'} is the nonlinearly transformed signal and g~ll{x} is a nonlinear function possessing the aforementioned characteristic. The subscript 1 of Y$) and g,ll{x} denotes the first stage. Letting 6!# be the tentative estimate of the data bit {b:)} in the first stage, we have $f) = sgn(YIll } for k = 2, 3 ..., K. Next, based on the tentative estimate (6[f)}, the MA interference is reconstructed as
(4
K
(5) k=2
where If' capped with '-' denotes the reconstructed MA interference. Then the new test statistic of the first user in the second stage can be computed by subtract- ing the reconstructed MA interference. Denoting the test statistic in the second stage by Y$,
N - 1
where g~zl{x} is the nonlinear function in the second stage. Finally, the symbol decision for the first user in the second stage is given by
For this two-stage nonlinear detector a simple smooth-limiting function is considered in this paper. It is defined by
= sgn{ Y$} .
where hl is the parameter of the nonlinearity in the lth stage to control the smoothness and abruptness of the nonlinearity in accordance with the noise characteristic. The selection of the nonlinearity is discussed later.
According to the preceding description the two-stage structure is depicted in Fig. 1. There is only one final symbol decision for the user of interest in the two-stage detector and therefore the computational complexity is re1,atively low in comparison with most multiuser de1,ectors.
In Fig. 1, if the second-stage nonlinear correlator is omitted, the detector then becomes a one-stage nonlinear detector (1-ND), which has the same form as the nonlinear correlation receiver described in [6] except the nonlinear function. Hence, by comparing the performance of this new detector and its one-stage coimterpart, we can obtain the performance gain achieved by this detector over the conventional nonlinear correlation structure.
Before proceeding to the performance analysis, it is worth discussing the selection of nonlinearity. Generally, selection is based on the asymptotic performance for N + 00 [5, 13, 141. It is well known that as N becomes infinity, the performance of the nonlinear detector is mainly determined by the normalised efficacy [ 131, i.e.
t = [ 7 gYz) l i .m.] 2 , 7 g2(4 f& )dx ( 8 ) -03 -cc
where g'(x) is the first derivative of g(x) andfv(x) is the noise PDF in eqn. 3 but with unit variance. Due to the fact that the optimal nonlinearity is dependent on the noise PDF and not feasible to be used in practice, sub- optimal nonlinearities are therefore proposed, such as the exponential function g[ll(x) defined in eqn. 7, the error function based nonlinearity g&) = 1 - erfc(hx) [6], and the noise blanker gnb(x) = hx for 1x1 < l/h and zero elsewhere [15]. Obviously, by using gp1(x) and ge&x), a large chip sample is smoothly limited in the correlator, while by using the noise blanker, a large chip sample would be completely disregarded when it exc:eeds the threshold lih.
10.0r ( i i i )
0.1 I I 1 I I
0.10 1.00 10.00 h
Normalised eficacy of nonlinearities in various &-mixture noises Fig. 2
(i) E = 0 (gaussian); (ii) E = 0.01, y 2 = 100; (iii) E = 0.05, y 2 = 100
-A-ggnb(x) ~ g& -x-- S i O ( 4 grdx)
In Fig. 2 the efficacy of the suboptimal nonlinearities in various &-mixture noises with E = 0, 0.01, 0.05 and 9 = LOO are plotted against h. As a benchmark, the efficacy of the locally optimum nonlinearity gl,(x) := -fq(x)/fq(x) [5] is also plotted. From Fig. 2 it can be seen that the maximum efficacy denoted by km,, of each nonlinearity is shown close to the bound achieved by the locally optimum nonlinearity glo(x). Although the tm, of gLll(x) is shown a little bit inferior to that of
IEE Proc.-Commun., Vol. 144, No. 6, December 1997
the noise blanker gnb(x), the sensitivity of the efficacy of gLl1(x) with respect to h is much less than that of gnb(x). Comparing g&) with gef(x), the efficacy of g[ll(x) is generally larger than that of g,kx). Hence, the use of gLl1(x) seems to provide more robust performance especially when the system is working in an unknown noise environment.
In the following Section the performance analysis of the two-stage nonlinear detector will be addressed with the suboptimal nonlinearity defined in eqn. 7.
4 detector
Error probability of two-stage nonlinear
First consider an approximate error probability for long spreading sequences (large N> for which the cen- tral limit theorem [16] can be applied. Next, the choice of the spreading codes is discussed and then a practical performance measure for choosing hl in eqn. 7 is addressed. Some numerical results illustrate the per- formance of the new detector.
4. I Approximate error probability When the data bits are equally probable the bit error probability of the 2-ND for the first user Per;;' can be written as
Substituting eqns. 1 and 5 for Vcy and 1") in eqn. 6 , the test statistic, Y[i;) can be written as
(10) where e$) = b$) - 6~:;) is the error bit in the first stage and equals either zero or 2b:) depending on whether 6$) = b:) or not.
= (b:), ..., b t ) ) T and x1 = (s,,';), ..., 6[{lT denote the bit vector and the first- stage tentative decision bit vector, respectively. Each element of PI and xl only takes the value from the set {-1, l}. By the total probability theorem [16], Pr{ errorlb
For notational simplicity, let
} can be written as
Pr{errorlbE)) = E Pr{bg)} 01 E S P , {k:2 1
PZES,,
2"-1 - -
PIESpl P 2 E S X 1
x { Pr{X1= P ~ I ~ C ) , P1)Pr{errorlb2), PI, 82)) (11)
where {b$)} are assumed to be independent and equally probable. Sp, and S,, are the sets of all 2K-1 data vectors and first-stage tentative decision bit vec- tors, respectively.
The first-stage tentative decisions (6 g)} are based on the corresponding test statistics { Y[$} in eqn. 4 and
389
these (K - 1) test statistics are statistically dependent owing to the correlation of the received signals { V(l"} with their PN codes. Although it is theoretically possi- ble to obtain the PDFs of the test statistics { Y@)}, the evaluation of the joint probability Pr{Xl = P21bm, PI> in eqn. 11 for (K - 1) random variables is extremely complicated except for some special cases.
Consider a system with long spreading sequences. Noting that conditioning on { b t ) , P I } , the test statistic Y[:) is a sum of N independent finite-variance random variables, we approximate Y$ as a gaussian variate by the central limit theorem. Accordingly the conditional joint density function of { Y[:), k = 2, ..., K) is a multi- variate normal distribution and can be expressed in the form of
[l](l)
f Y ( Y K - l l b : ) , P l ) 1 - -
(27+-/2 IC11/2
where Y,, = Cy2, y3, ..., ydr, /CI and C-l are the determinant and the inverse matrix of the covariance matrix C , respectively, (C-l)klk2 is the (k l , k2)th entry of the matrix C-l. Conditioning on {b:), pl}, m(F is the mean of Y[!f', and the k , kJth entry of C is the
gfll{x] defined in eqn. 7 and the noise PDF specified in eqn. 3, the mean and variance of gLl,{qJ + s) for finite input signal s are easily evaluated, see the Appendix (Section 9), so are the conditional mean and covariance in eqn. 12. Thus, the joint density function in eqn. 12 can be determined. As a result the joint conditional probability Pr{Xl = p2/b i ) , P1} in eqn. 11 can be calculated by
covariance of Y$) and Yrll b . By the nonlinear function
Pr(x1 = P2Ib:),pl)
= 1 fu(YK-lIb:),Pl)dYK-l (13) Y E D ( P z )
where D(p2) is the region defined by
d:) is the kth element in the vector P2. Efficient computation of the multivariate normal integral in eqn. 13 can be found in the literature [17].
Next, consider the conditional probability Pr{ervorlb:;, /I1, p2). Once again, conditionin on {!I??, D1. a}. the second-stage test statistic Y i ) in eqn. 10 is a sum of Pi independent finite-variance ran- dom variables. By applying the central limit theorem, Pr(errorlb$, &> is given by
Pr{errwIbK), 01, ~ z )
where Q(x) = l/d(2z j;e-'klt is the complementary error function, E{ Y i ? lb$), pi, p2} and Tar{ Y# lbk),
390
PI, p2} denote, respectively, the mean and variance of Y# in eqn. 10 conditioned on the data bit vector {bc ) , PI} and the first-stage decision bit vector x1 = P2. By using eqns. 18 and 22 in the Appendix, these conditional mean and variance can be readily evaluated.
Finally, substituting eqns. 13, 14 and 11 in eqn. 9 yields an estimate of the bit error probability of the 2- ND for the first user P$hl as
r
By noting that both p1 and p2 are ( K - 1) dimensional vectors, there are 22K-1 such probabilities to compute. Therefore the evaluation requires quite intensive com- putation, which increases exponentially on the number of users. However, this evaluation would be useful to compare the performance of the new detector with the conventional nonlinear decision. For comparison, the bit error probability of the one-stage nonlinear detector (1-ND) for the first user, denoted by P'& , is also given as follows
Before presenting some numerical results to illustrate the performance of the 2-ND and 1-ND, the choice of spreading codes is discussed.
4.2 Choice of spreading codes In this paper the semiorthogonal Gold codes are considered as the spreading sequences. It is well known that in a synchronous system the fully orthogonal Walsh function codes can be used to completely annihilate MA interference. However, in the nonlinear correlator, its orthogonality will be vitiated by the nonlinearity that is incorporated for limiting the large impulse noise. As an illustration, consider the performance of the 1-ND with the nonlinear function defined in eqn. 7. For the sake of simplicity the parameter h is fixed to the optimum value which maximises the efficacy as shown in Fig. 2. The bit error probabilities of the 1-ND of using the Walsh codes of iV = 128 in a three-user system with SNR#l = 6.5dB over E-rmxture noises with E = 0, 0.01, 0.05 and = 100 are evaluated by eqn. 16 and plotted in Fig. 3. The results for using the Gold codes with N = 127 are also shown in the Figure. In the experiment, SNR#2 is set to (SNR#l + SNR#3)/2dB. To make a fair comparison, the performance of the extended Gold sequence with N = 127 + 1 is also plotted, of which an even parity bit is added to the Gold codes so that the length of the Gold sequence equals 128.
From Fig. 3 it can be seen that when the noise is nor- mally distributed, the Gold sequence and its extended
IEE Proc -Commun , Vol 144, No 6 December 1997
version can provide comparable performance to Walsh codes in mitigating MA interference. However, when the noise density deviates from normality, the perform- ance of Gold codes and even full-orthogonal Walsh codes are deteriorated by the incorporated nonlinearity and shown to be sensitive to the power of interfering users. Since the Gold codes are shown to provide com- parable performance to Walsh codes in a synchronous system, and they would be more appropriate in an asynchronous system and multipath fading channel, we finally select the Gold codes as the spreading sequences in this paper. Even with semiorthogonal Gold codes the performance of the detector is still admirable.
eqn. 17 in terms of the first-stage test statistic Yr:;, can be determined numerically. In the second-stage, by noting that if the MA interference is completely suppressed, there seems to be only one user in the channel, the optimum h2 is expected to be the value of the optimum parameter in the single-user case.
0.01 0 .I 1.0 10
h l Fig.4 Output signal-to-noise ratio SN against value of hl in single- user and three-user systems with SVR(#I,? 3) = 6.5dB and N = 127 over various &-mixture noises
I 1
0 2 L 6 8 10 SNR#3 - SNR 81, dB
Fig. 3 Comparison of Wulsh and Gold codes on bit-error probability of I-NLI in three-user system with SNR#I = 6SdB over various &-mixture noise;? SNRtt2 = (SNR#I + SNR#3)/2 dB ___ Walsh (128) Gold (127) A (i) E 1: 0 (gaussian); (ii) E = 0.01, y 2 = 100; (iii) E = 0.05, yz = 100
extended Gold (127 + 1)
In the following we address a practical performance measure for optimising the parameter of the nonlinear- ity to enhance the system performance.
4.3 Op tim ising controlling parameter In the 2-ND, two parameters {hl}1=l,2 are used to con- trol the nonlinearity and their values have significant effect on the performance of the detector. Although the error probability is the most meaningful measure of performance for optimising {h,}l=1,2, since it is a highly nonlinear function of {hl}l=1,2, its practical value is lim- ited. As an alternative, a conditional output signal-to- noise ratio (SNR,) is considered a more practical per- formance index. The SNR, of interest can be defined by
SNT, = E2{Y;'Jb:) = l}/var{Y$)lb:) = 1) (17)
where Y$ is test statistic of the first user and set equal to Y::! for determining hl. As N + M the SNR, in eqn. 17 is reduced simply to the normalised efficacy in eqn. 8 multiplied by 2E'i)lN0. It implies that for infinite N the error probability of a nonlinear correlator is mairily determined by the value of SNR, [6, 13, 141. Hence, for large N, choosing {h,} to maximise SNR, is asymptotically equivalent to choosing { h,} to minimise the error probability.
In the first-stage E{ Y i:i lb$L) = I} and Vur{ Y fii Ib;) = l ) , which are averaged over the noise component {q]) and the interfering bit vector PI, can be evaluated straightforwardly with the aid of the equations in the Appendix. Hence, for any given noise distribution, the optimum value of hl , which maximises the SNR, in
IEE Proc -Commun, Vol 144, No 6, December 1997
K = 1 - K = 3 (i) E = 0 (gaussian); (ii) E = 0.01, y z = 100; (iii) E = 0.05, yz = 100
As an illustration, the SNR, values against the value of hl in single-user and three-user systems with SNR(#l, #2, #3) = 6.5dB and Gold codes of N = 127 over various &-mixture noises are depicted in Fig. 4. Consider hl E [0.01, IO] of practical interest. Due to the effect of MA interference SNR, in the three-user system is smaller than that of the single-user system over various &-mixture noises. Further, the curves indicate that the optimum value of h l , which maximises SNR,, in the three-user system is generally small compared with its counterpart in the single-user case. This phenomenon implies that in the multiuser system, the nonlinear transformation gill{ x} with the smaller h has a larger linear region around the origin to allow the multiuser signals to pass through with smaller distortion and thus the MA interference can be suppressed in the correlation by the well designed spreading sequences.
Practically, when the noise PDF is unknown or time varying, a stochastic learning algorithm can be used to estimate the optimum values of {h1}1=1,2. The algorithm in [18] is a steepest descent method in which SNR, is estimated by a time average value. It is shown to pro- vide a good estimate of the parameter of the nonlinear- ity over various &-mixture noises. Here the algorithm is omitted for the sake of brevity.
After finding the optimum values of the parameter {hl}l=1,2 we apply the formula of eqn. 15 to evaluate the performance of the 2-ND. The numerical results are presented in the following.
4.4 Numerical results In the experiment is set equal to 100 and three dif- ferent values of E, E = 0, 0.01, and 0.05 are considered. Without loss of generality, the total variance of the noise 0," is fixed to 1 and the signals' amplitudes { €JJ are varied to obtain the SNR value of interest. At any SNR level the optimum values of h, and h2 are obtained by maximising their respective SNR,s and then the bit-error probability of the 2-ND is evaluated
391
Table 1: Approximate bit-error probabilities of first user in three-user system with SNR(#I, 2,3) = 6.5dB and N = 127 for 1-ND and 2-ND over various &-mixture noises
Gaussian, E = 0 1.40 x I O ” 1.40 x 10-3 1.3s x 10-3 1.38 x 10-3
E=O.OI,Y= 100 3 . 1 0 ~ 10-3 2.67 x 10-5 2.06 x 10-5 2.06 x 10-5
(hopr= 0.15)
(h,,, = 1.03)
& = 0.05, ?= 100 2.35 x 6.76 x 7.91 x 7.91 x 10-I2 (hopt = 3.50)
f,L is exact bit-error rate via eqn. 9 in [I21 and f, the approximate error rate via eqn. 16 for K = 1. h,,, is optimum candidate for single-user bound of nonlinear detector
by eqn. 15 in comparison with that of the 1-ND via eqn. 16. In the 1-ND, the parameter of nonlinearity is set to the optimum value of hl in the 2-ND.
The bit-error probabilities against SNR values of interest for the 2-ND and the 1-ND in a three-user sys- tem are plotted in Fig. 5. The three users have the same power. Here, Gold codes with N = 127 are applied. As a benchmark, a single-user bound of the nonlinear cor- relator computed via eqn. 16 for K = 1 is also given. From Fig. 5, due to the removal of the MA interfer- ence, the 2-ND provides a near single-user performance in various &-mixture noises and outperforms its one- stage counterpart (1-ND).
2 5 0 11 1L SNR#I, dB
Bit-error probabilities against value of SNR#I for I-ND and 2- Fig.5 ND in three-user system with N = 127 over various &-mixture noises
__ single user (i) E = 0 (gaussian); (ii) E = 0.01, y2 = 100; (iii) E = 0.05. y’ = 100
1-ND ( K = 3) A 2-ND ( K = 3)
10-2
2 IO-^
7
tt L
- 0
- ._
I
0 2 6 8 10 SNR#3-SNR#I,dB
Fig.6 Near-far effect on bit error probabilitiesfor I-ND and 2-ND in three-user system with SNR#I = 6.5 dB and .V = 127 over various &-mix- ture noises SNR#2 = (SNR#l + SNR#3)12 dB
A 2-ND ( K = 3) (i) E = 0 (gaussian); (11) E = 0.01, y’ = 100; (iii) E = 0.05. y2 = 100
1-ND (K = 3). ~ single user
Usually it is of great interest to investigate the near- far effect on the bit error probability when the power of interfering users becomes relatively large. In this context we fix the SNR value of the first user (SNR#l = 6.5dB) and vary those of the interfering users (SNR#2, #3) in the manner mentioned in Section 4.2. The results in various &-mixture noises are shown in Fig. 6. The optimum parameter h is derived from max- imising SNR, in Fig. 6, while in Fig. 3 the parameter is obtained from maximising the efficacy. It is shown that the 2-ND can provide a near single-user performance regardless of the power of the interfering users (#2, #3). In contrast, its one-stage counterpart suffers from the performance degradation when the power of MA interference becomes large. It appears that due to the interference cancellation, the 2-ND is insensitive to MA interference.
Noting that the linear multistage detectors in [lo, 111 were also based on the MA interference cancellation scheme, one would have interest in their performance in impulsive channels. Here the single-user bound of the linear detector, computed by using the characteristic function method in [12] (eqn. 9), is used to indicate the best performance that the linear multistage detectors can achieve. The results in a three- user system with SNR = 6.5dB and N = 127 are listed in Table 1 in comparison with those of the 1-ND and the 2-ND. It is shown that the single-user performance of linear detector is degraded in the impulse noise (E > 0), while the 2-ND still works well and gives a near single-user performance in various &-mixture noises. The results suggest that the 2-ND is a good structure for being used in impulsive channels with the capability of suppressing the MA interference as well as the impulse noise.
The analysis is valid only for large N . When N is small, the test statistic can no longer be approximated to be normally distributed. For a short PN code (small N) the approximation of the density by normal curve can be improved by adding correction terms [16]. In thrs paper, Monte Carlo simulation is adopted to esti- mate the bit-error rate for small N.
5 Simulation results
In this Section the average bit-error rates of the 1-ND and the 2-ND in &-mixture noises are evaluated via Monte Carlo simulations. In the experiment we consider Gold codes with N = 31. The total variance of the channel noise 07: is fixed to 1 and the signal’s amplitudes {e,} are adjusted to obtain S N R values of interest.
To optimise the parameter of the nonlinearity, the SNR, defined in eqn. 17 is still applied. In Fig. 7, the SN& against the value of hl in single- and three-user systlem with SNR = 6.5dB and N = 31 is plotted. Simi- lar results to those in Fig. 4 for N = 127 are observed. The optimum candidate is obtained by maximising the corresponding SNR,. In the following, the parameter of the nonlinearity is set to the optimum candidate to study the bit-error rate of the detector.
0 12.5 [r Z ln
7.5
5 .O 0.01 0 .I 1.0 10
gaussian density. It appears that the 2-ND can jointly suppress MA interference and impulse noise and its performance is less susceptible to an increase in the number of users.
10-61 I
2 L 6 8 10 S N R f I, d B
Fig.% Monte Carlo estimate of bit-error rates against value o SNR#l for 1-ND and 2-ND in three- and five-user systems with N = 3fi over E- mixture noise with E = 0.01 and y2 = 100 All users with same power -.- 1-ND ( K = 3) -A- 1-ND ( K = 5)
U 2-ND (K = 3) A 2-ND (K = 5 )
(i) linear (single-use; bound); (ii) nonlinear (single-user bound) h l
Fig.7 Output signal-to-noise ratio SNR, against value of h in single- user (2nd three-user systems with SNR(#I, 2, 3) = 6.5dB and d = 31 over various &-mixture noises
(i) E := 0 (gaussian); (ii) E = 0.01, y 2 = 100; (iii) E = 0.05, y2 = 100 K = 1 - K = 3 10-2 .,
al Y
n X
For the performance comparison the single-user bound of linear detector, which is computed using the characteristic function method [ 121 (eqn. 9), is still used to indicate the best performance that the linear multi- user detectors [8-111 can achieve. Further, for short PN codes ( N = 31), the single-user bound of nonlinear detector using eqn. 31 in the literature [6] with the non- linearity defined in eqn. 7 is given as a benchmark.
First, in the E-mixture noises, the effect of the two parameters E and on the BER of the 1-ND and the 2-ND is studied and the results for synchronous three- and five-user systems with SNR = 6.5dB and N = 31 are tabulated in Table 2. All users are having the same po-er. It is shown that the 2-ND exhibits near single- user performance in various &-mixture noises and out- performs its one-stage counterpart (1-ND). For the lin- ear detector the detrimental effect of the impulse noise on its single-user performance is nevertheless observed when the noise distribution is largely deviated from the
lo-616, 0 2 L 6 a 10
SNR#K-SNR# l . d B Fig.9 Monte Carlo estimate of bit-error rates against value of SNR#K - SNR#I for I-ND and 2-ND in three- and five-user systems with SNR#l = 6SdB and N = 31 over &-mixture noise with E = 0.01 and y2 = 100 SNR#k = SNR#1 + (k ~ l)/(K - l)(SNR#K - SNR#l) dB -.- 1-ND ( K = 3) -A- 1-ND ( K = 5 ) (i) linear (single-user bound); (ii) nonlinear (single-user bound)
U 2-ND ( K = 3) A 2-ND (K = 5 )
Next, BER against SNR for the I-ND and the 2-ND in the E-mixture noise with E = 0.01 and = 100 are plotted in Fig. 8 for both three- and five-user systems. All use the same power. Apart from the similar results
Table 2: Monte Carlo estimate of bit-error rates of first user in three- and five-user systems with SNR#I 6.5dB and N 31 for 1-ND and 2-ND over various E-mixture noises. All users are with same power
E = 0 K = 3 I .40 x 10-3 1.62 x 10-3 1 . 5 6 ~ 10-3 1 . 5 3 ~ 10-3
(Gaussian noise) K = 5 1.71 x 1 . 5 5 ~ (h,,=0.498)
~ = 0 . 0 0 5 , v = 1 0 K = 3 1.52 x I O 3 1.60 x I O 3 1.48 x 10” 1.39 x K = 5 1.72 x I O ” 1.40 x (hopt= 0.612)
~ = 0 . 0 0 5 , f = 1 0 0 K = 3 6.03 x 10-3 3.55 x I O 4 2.41 x I O 4 1.99 x I O 4
K = 5 5.43 x I O 4 2.29 x I O 4 (hop,= 1.025)
~ = 0 . 0 1 , ~ = 1 0 0 K = 3 6.99 10-3 9.70 10-5 2-85 x 10-5 2.52 x 10-5
K = 5 2.35 x I O 4 4.05 x (hOpr= 1.487)
P,L and PeN denote, respectively, exact bit-error rate via eqn. 9 in 1121 and approximate bit-error rate via eqn. 31 in 161. hop, is optimum candidate for single-user bound of nonlinear detector
IEE 1’roc.-Commun., Vol. 144, No. 6, December 1997 393
as listed in Table 2, the large performance gain of the nonlinear single-user bound over the linear one indi- cates that in the impulsive channel the nonlinear detec- tor can provide good performance over the linear one.
Further investigation of the ‘near-far’ effect on the performance is carried out. In the experiment the SNR value of the first user (also the weakest) is fixed, i.e. SNR#1 = 6.5dB and those of interfering users are varied. The SNR value of the kth user is set to SNR#1 + (k - l)(SNR#K - SNR#l)/(K ~ 1) dB. Results in three- and five-user systems over the &-mixture noise with E = 0.01 and 9 = 100 are plotted in Fig. 9. Due to the removal of MA interference, the 2-ND gives a near single-user performance regardless of the interference power. In contrast, the performance of the 1-ND is seriously affected by MA interference and the single- user performance of the linear detector seriously deteriorated by impulse noise.
The 2-ND is shown to provide a near single-user per- formance in demodulating a signal contaminated by both MA interference and impulse noise.
6 Conclusions
The two-stage nonlinear detector was shown to be a good receiver for demodulating DSiSSMA signals corrupted by both MA interference and impulse noise. Analysis and demonstration have shown that by reconstructing and removing the MA interference a near single-user performance can be achieved by this detector. Unlike most multiuser systems the complexity of the detector is low.
7 Acknowledgment
This project is supported by the Croucher Foundation under grant number 905-021 and CERG under grant number 9040 17 I .
8 References
1 BLACKARD, K.L., RAPPAPORT, T.S., and, BOSTIAN, C.W.: ‘Measurements and models of radio frequency impulsive noise for indoor wireless communications’, IEEE J. Sel. Areas Commun., 1993, SAC-11, (7), pp. 991-1001
2 CACOPARDI, S., FRESCURA, F., and REALI, G.: ‘4-phase DS-CDMA mobile radio receiver in non-Gaussian environment’.- Proceedings of 1994 IEEE 3rd international smoosium on Spread-spGctrum techniques and applications, ISSSTA’94, Oulu, Finland, July 1994, pp. 440444
3 MIDDLETON, D.: ‘Statistical-physical models of electromag- netic interference’, I€€€ Trans., 1977, EMC--19, (3), pp. 106-126 . , _ _
4 MIDDLETON, D.: ‘Procedures for ‘determining the parameters of the first-order canonical models of class A and class B electro- magnetic interference’, IEEE Trans., 1979, EMC-21, (3), pp. 190- 208 MILLER, J.H.: and THOMAS, J.B.: ‘The detection of signals in impulsive noise modelled as a mixture process’, IEEE Trans., 1976, COW24, (5), pp. 55%563
6 AAZHANG, B., and POOR: H.V.: ‘An analysis of nonlinear direct-sequence correlators-, IEEE Trans., 1989, CO&37. (7).
7 ENGE. P.K., and SARWATE, D.V.: ‘Spread-spectrum multiple- access performance of orthogonal codes: impulsive noise’, IEEE Trans., 1988, OW436 (l), pp. 98-106
8 VERDU, S . : ‘Minimum probability of error for asynchronous Gaussian multiple-access channels’, IEEE Trans., 1986, l’I-3.2,
CHEN: D.S., and ROY, S.: ‘An adaptive multiuser receiver for CDMA systems’, IEEE J. Sel. Areas Commun., 1994, SAC-= ( 5 ) , pp. 808-816
10 VARANASI, M.K., and AAZHANG, B.: ‘Multistage detection in asynchronous code-division multiple-access communications’, IEEE Trans., 1990, OK%?, (4), pp. 509-519
11 MOWBRAY, R.S., PRINGLE, R.D., and GRANT, P.M.: ‘Increased CDMA system capacity through adaptive co-channel interference regeneration and cancellation’, IEE Proc. I-Commun. Speech Vis., 1992, 129, ( 5 ) , pp. 515-524
5
pp. 723-731
(11, PP. 85-96 9
394
12 AAZHANG, B., and POOR, H.V.: ‘Performance of DSiSSMA communications in impulsive channels - Part I: linear correlation receivers’, I€EE Trans., 1987, CO&35, (1 l), pp. 1179-1 188
13 KASSAM, S.A.: ‘Signal detection in non-Gaussian noise’ in DOWDEN and CULVER (Springer-Verlag, 1988)
14 POOR, H.V.: ‘An introduction to signal detection and estimation’ (Springer-Verlag, New York, 1994)
15 MILLER, J.H., and THOMAS, J.B.: ‘Robust detectors for sig- nals in non-Gaussian noise’, IEEE Trans., 1977, COiW45, (7), pp. 686-690
16 PAPOULIS, A.: ‘Probability, random variables and stochastic process’ (Mcgraw-Hill, Singapore, 199 1)
17 PLACKETT, R.L.: ‘A reduction formula for normal multivariate integrals’, Biometrika, 1954, 41, pp. 351-360
18 WENG, J.F., LEUNG, S.H., LAU, W.H., and BI, G.G.: ‘Non- linear correlator for DSiSSMA communications in impulsive channels’. Proceedings of 4th IEEE international symposium on Spread-spectrum techniques and applications, lSSSTA‘96, Ger- many, September 1996, pp. 1043-1047
9 Appendix
9. I Evaluation of E{gm{qj + s and Var{glll{qj+s} By definition of grl l{x} in eqn. 7 and the PDF of vi specified in eqn. 3,
E{g[z]{% + S I >
- S
-S
-cm
= F ( s , 0) - F ( s , hl) + F ( - s , hl) - F(- s , 0)
(18) where F(s, h) = J.,”exp(-h(x + s)&(x)dx. By the noise PDF in eqn. 3,
F ( s , h) = qexp( -h lc + s ) ) f q , (z)dz - s
= (1 - E)A(s , h, 0;) + EA(s, h, 08) (19) where A(s, h, d) is given by
A(s, h, s 2 )
-25
= exp(h2a2/2 - hs)Q(hg ~ s / o )
E b ; ] h + S I >
(20) where Q(x) = 1/4(2~)>1;e-‘3zdt is the complementary error function. Similarly,
=Jl-2 exp(-hl(z+s))+exp(-2hl(z+s))lf,~ (z)de
+ r [ l - z e x p ( h , ( a + s ) ) +exp(2hl(z+s)>lf7, (z)dz
- S
-cc
= F ( s , 0) - 2F(s , hl) + F ( s , 2hl) + F(-s , 0)
var{g[ll{%+sS)> = E{g$]{Ts+sIl -E2{g[l]{77J +s>>
-2F(-s, hl) + F ( - s , 2hl) (21)
(22 )
AS a result Vur{g,ll{qJ + s}} can be written as
The explicit expression of eqn. 22 follows from eqns. 18 and 21 and is omitted for the sake of brevity.