22
October, 2009 Ken Butts, TEMA 1 Control, Electronics, Communication, and Embedded Software Infrastructure integration Vehicle technologies

October, 2009 Ken Butts, TEMA 1
Control, Electronics, Communication, and Embedded Software
Infrastructure integration
Vehicle technologies

October, 2009 Ken Butts, TEMA 2
Presentation Flow
1. Control, Electronics, Communication, and Embedded Software: Enabled Products and Features
2. Development Complexity and Mitigation3. Future Development Challenge: Cyber-physical systems
October, 2009 Ken Butts, TEMA 3
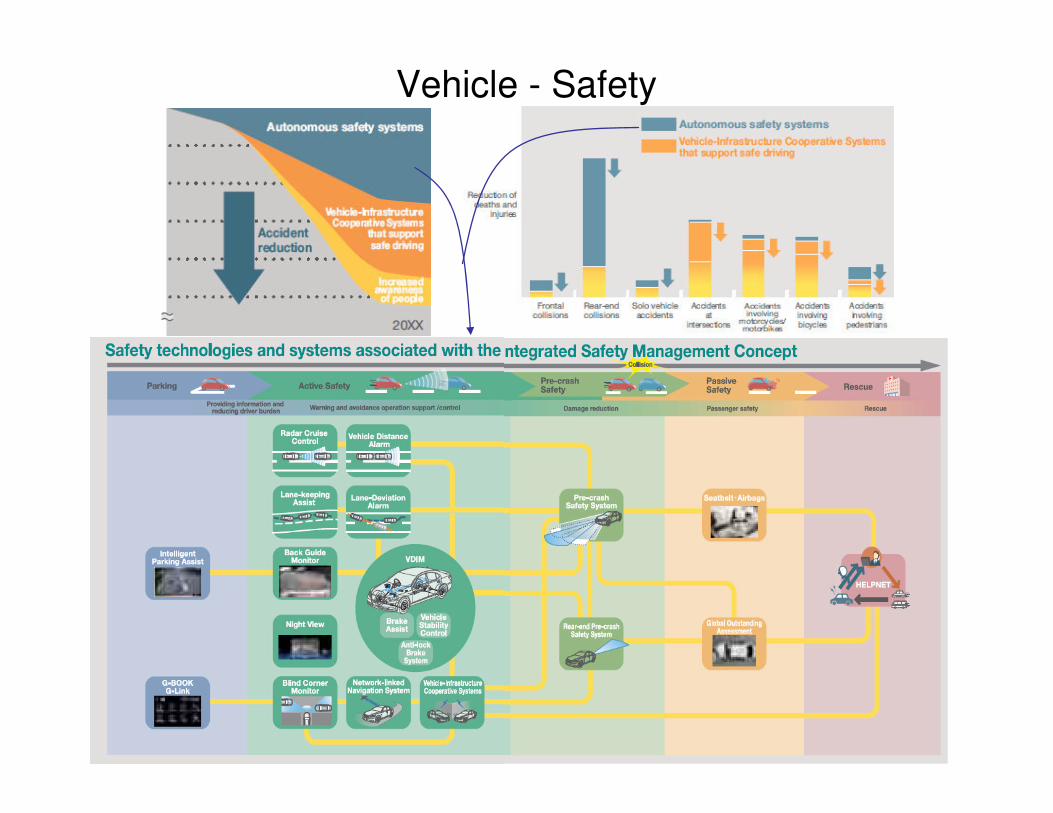
Vehicle - Safety
October, 2009 Ken Butts, TEMA 4
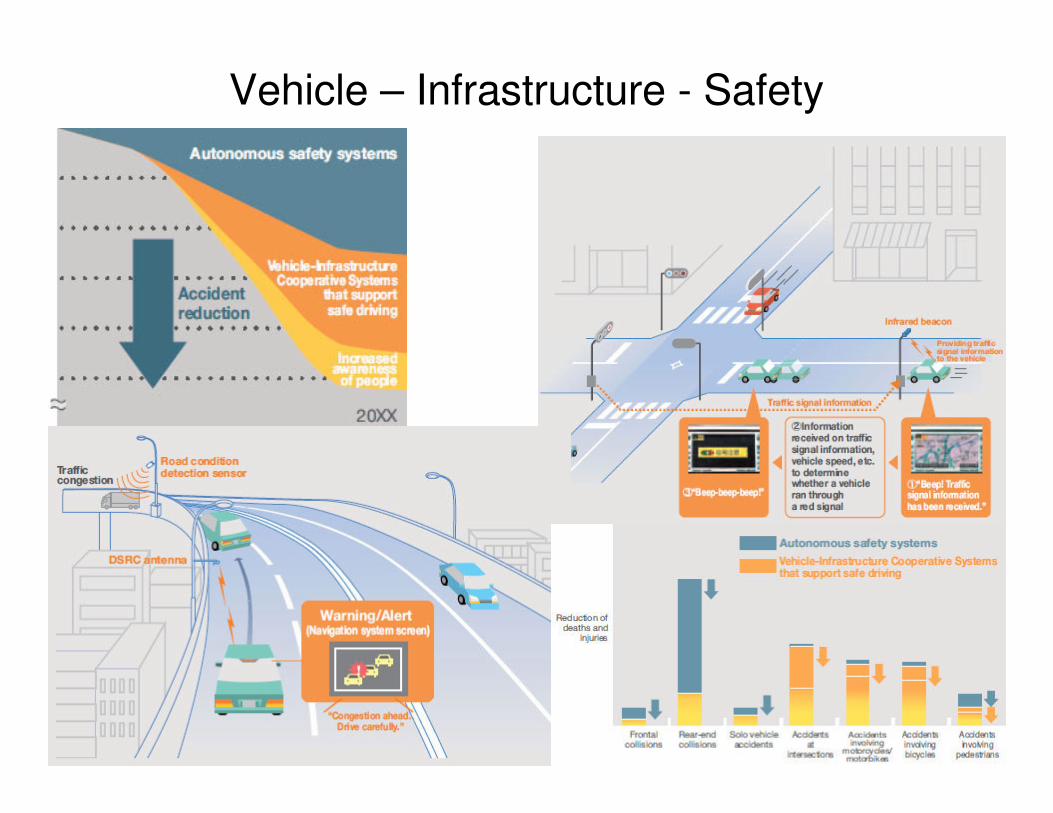
Vehicle – Infrastructure - Safety

October, 2009 Ken Butts, TEMA 5
Traffic flow management - Environment

October, 2009 Ken Butts, TEMA 6
Environment - Powertrains
Car of the futureCar of the future
THSTHS
FCHVFCHV
Diesel DIDiesel DI
D-4D-4
VVT-iVVT-i
Lean BurnLean Burn EVEVCNGCNG
Hybrid Technology
Dieselengine
Gasolineengine
Electricvehicle
Alternativeenergy
October, 2009 Ken Butts, TEMA 7
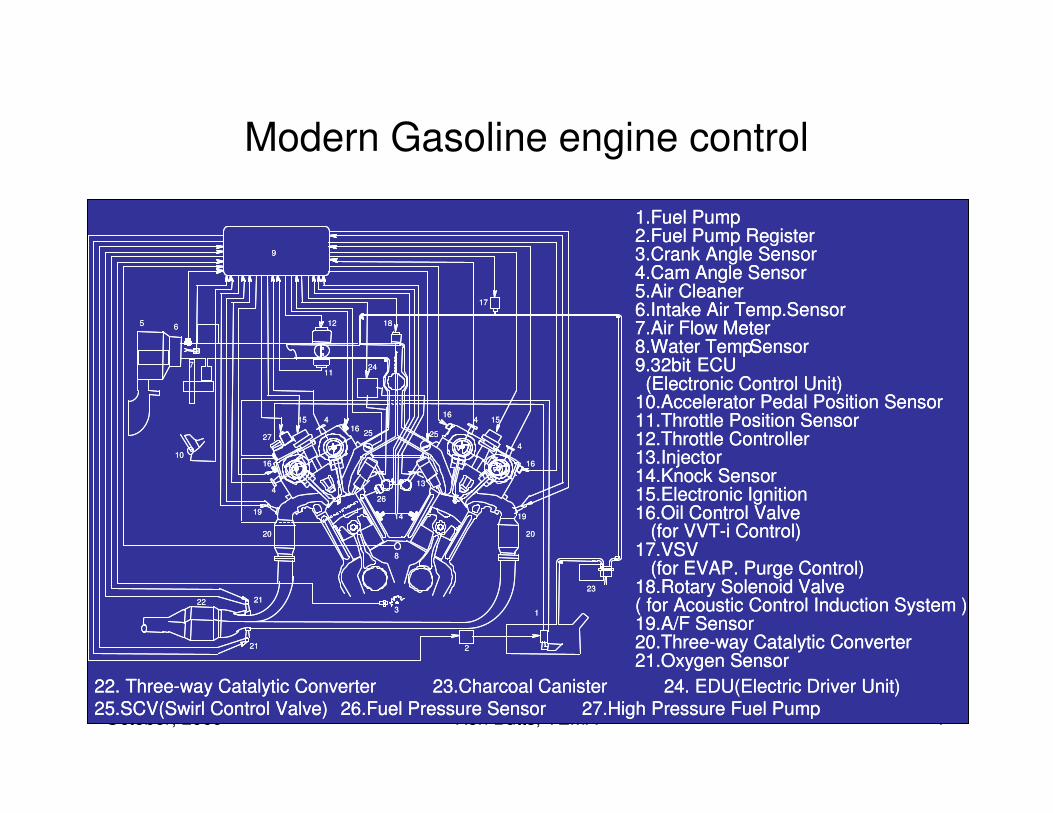
Modern Gasoline engine control
1
2
3
4
4
4
4
5 6
7
8
9
10
11
12
13
14
1515
16
16
16
16
17
18
1919
2020
21
21
22
23
24
2525
26
27
1
2
3
4
4
4
4
5 6
7
8
9
10
11
12
13
14
1515
16
16
16
16
17
18
1919
2020
21
21
22
23
24
2525
26
27
1.Fuel Pump2.Fuel Pump Register3.Crank Angle Sensor4.Cam Angle Sensor5.Air Cleaner6.Intake Air Temp.Sensor7.Air Flow Meter8.Water Temp.Sensor9.32bit ECU
(Electronic Control Unit)10.Accelerator Pedal Position Sensor11.Throttle Position Sensor12.Throttle Controller13.Injector14.Knock Sensor15.Electronic Ignition16.Oil Control Valve
(for VVT-i Control)17.VSV
(for EVAP. Purge Control)18.Rotary Solenoid Valve( for Acoustic Control Induction System )19.A/F Sensor20.Three-way Catalytic Converter21.Oxygen Sensor
1.Fuel Pump2.Fuel Pump Register3.Crank Angle Sensor4.Cam Angle Sensor5.Air Cleaner6.Intake Air Temp.Sensor7.Air Flow Meter8.Water Temp.Sensor9.32bit ECU
(Electronic Control Unit)10.Accelerator Pedal Position Sensor11.Throttle Position Sensor12.Throttle Controller13.Injector14.Knock Sensor15.Electronic Ignition16.Oil Control Valve
(for VVT-i Control)17.VSV
(for EVAP. Purge Control)18.Rotary Solenoid Valve( for Acoustic Control Induction System )19.A/F Sensor20.Three-way Catalytic Converter21.Oxygen Sensor
22. Three-way Catalytic Converter 23.Charcoal Canister 24. EDU(Electric Driver Unit)25.SCV(Swirl Control Valve) 26.Fuel Pressure Sensor 27.High Pressure Fuel Pump22. Three-way Catalytic Converter 23.Charcoal Canister 24. EDU(Electric Driver Unit)25.SCV(Swirl Control Valve) 26.Fuel Pressure Sensor 27.High Pressure Fuel Pump
October, 2009 Ken Butts, TEMA 8
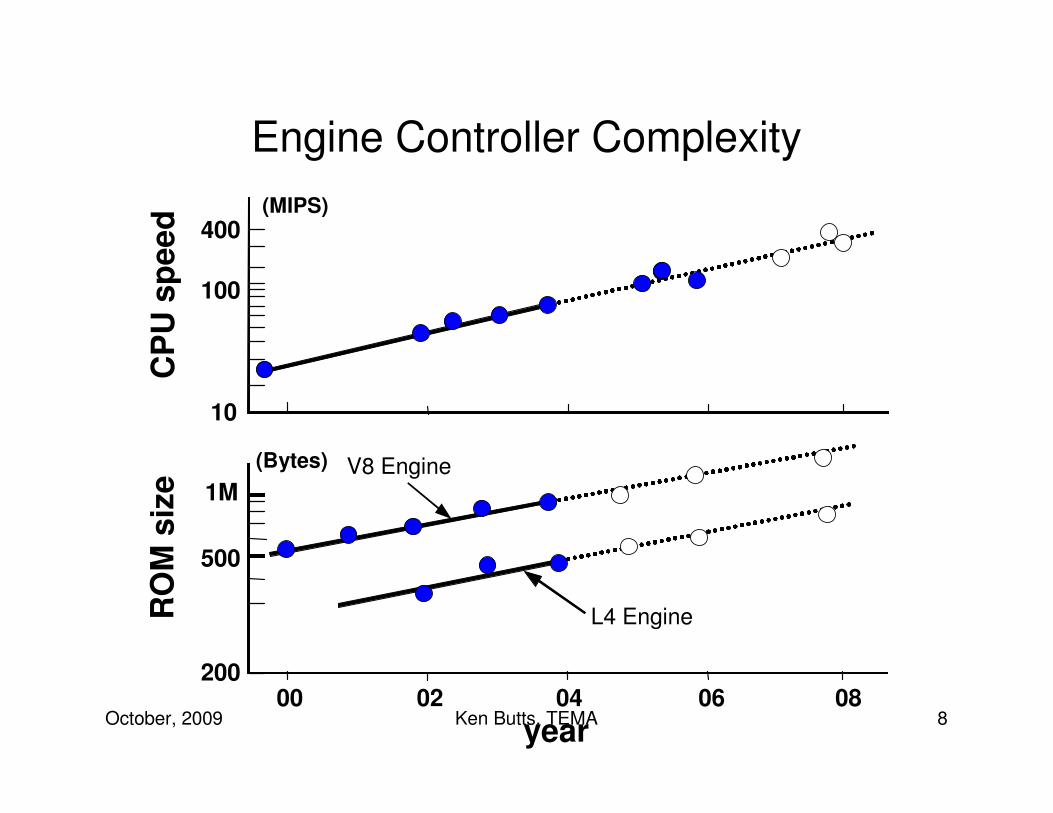
Engine Controller Complexity
10
100
400(MIPS)
year00 02 04 06 08
200
500
1MV8 Engine
L4 Engine
(Bytes)
RO
M s
ize
CP
U s
peed

October, 2009 Ken Butts, TEMA 9
Process View – Traditional ‘Systems V’

October, 2009 Ken Butts, TEMA 10
Complexity Mitigation –Process and Information Management
Control System Development Activities
Model/Data Management
DatabaseModel/Data/Process
/Architecture/Schedule
ProcessManagemen
t
RequirementManagement
Analysis &Methodologie
s
ModelExecutio
nControl Design
Calibration
Verification & Validation
Plant Modeling
Model/Data Management
DatabaseModel/Data/Process
/Architecture/Schedule
ProcessManagemen
t
RequirementManagement
Analysis &Methodologie
s
ModelExecutio
nControl Design
Calibration
Verification & Validation
Plant Modeling Services M odel/Data Management
ModelArchitectur
e
ModelArchitectur
e
October, 2009 Ken Butts, TEMA 11
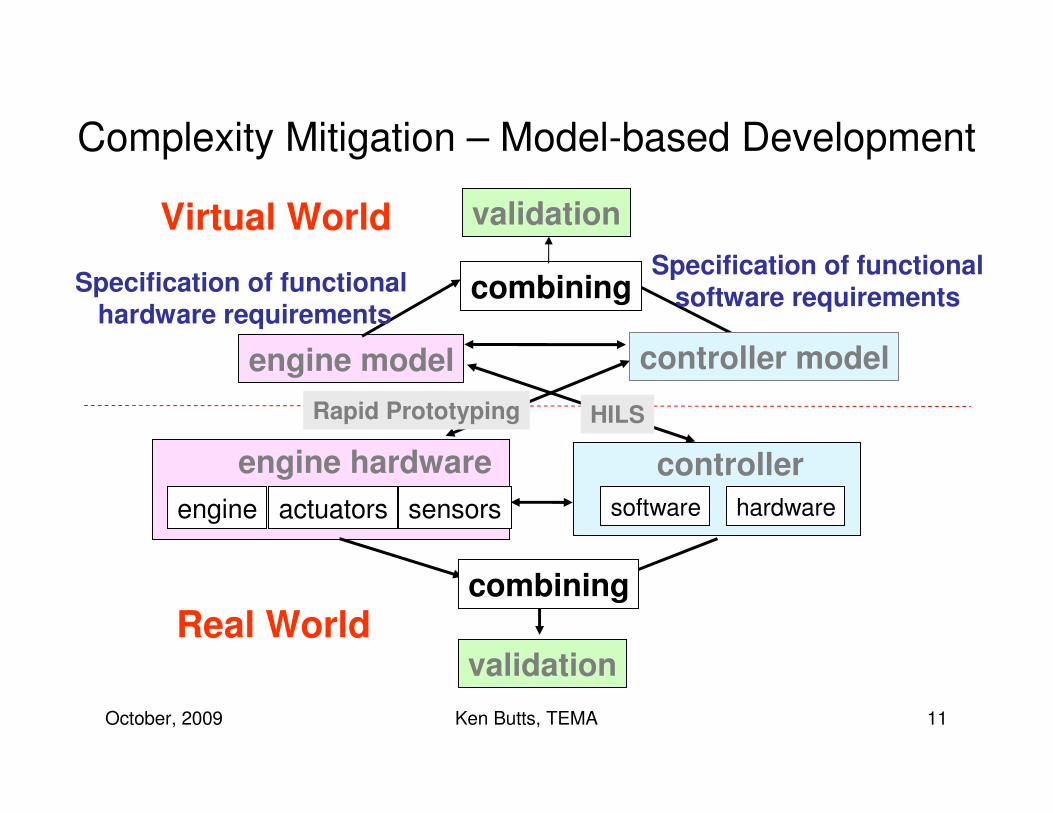
Complexity Mitigation – Model-based Development
controllersoftware hardware
validation
engine hardwareengine actuators sensors
Real World
engine model
validationVirtual World
HILSRapid Prototyping
combining
combining
controller model
Specification of functional hardware requirements
Specification of functionalsoftware requirements

October, 2009 Ken Butts, TEMA 12
Complexity Mitigation – Model-based Development

October, 2009 Ken Butts, TEMA 13
Complexity Mitigation –Automatic Code Generation (ACG)
SoftwareVerification
Softwaredesign
Coding
Coding
Verification
Integration
Verification
Modification
Integration
Verification
Modification
Verification
Softwaredesign
Verification
Modification
Verification
Integration
SoftwareVerification
SoftwareVerification
Softwaredesign 50%
20%
Beforeintroducing
ACG
Afterintroducing
ACG
Future(Target)
Development time
- Verification

October, 2009 Ken Butts, TEMA 14
Complexity Mitigation –Plant Modeling Productivity
Acausal, component based modeling*- Model diagrams map directly to the physical system - Multi-domain modeling- Symbolic system equations are generated automatically- Multiple stages of symbolic model optimization
*http://www.maplesoft.com/products/maplesim/advantage.aspx

October, 2009 Ken Butts, TEMA 15
Complexity Management – Architecture Driven Rapid Modeling
SAE AS-2C Avionics Architecture Description Language SubcommitteeDetroit, MI - April, 2006

October, 2009 Ken Butts, TEMA 16
Complexity Mitigation –Verification and Validation
* Coverage Analysis for Model Based Design Tools, William Aldrich, The MathWorks, Inc.
Model / Code equivalence checking*
Automated test case generation(path (model or code) structural coverage)�
• Style / Rules compliance checking • Defect pattern detection• Property checking• Sensitivity / robustness evaluation• Dependency analysis• Model / code slicing

October, 2009 Ken Butts, TEMA 17
Complexity Mitigation – Model-based Calibration
Workshop on Open Problems and Challenges in Automotive Control – April 2006
Development ProcessAdvanced Production
Mass DevelopmentLeadoff Development Prio
rity
in
Cal
ibra
tion
Speed Quality
Completion of Prototype Engine
Knowledge from Physical Modeland Existing Engines
Knowledgefrom Measured Data
Parts
Cal
ibra
tion
Qua
lity
Target Quality Level
Development ProcessAdvanced Production
Mass DevelopmentLeadoff Development Prio
rity
in
Cal
ibra
tion
Speed Quality
Completion of Prototype Engine
Knowledge from Physical Modeland Existing Engines
Knowledgefrom Measured Data
Parts
Cal
ibra
tion
Qua
lity
Target Quality Level
Actuator2
Actuator1
BS
FC
OptimizationDoE Modeling& Evaluation
Engine Speed
Load
VVT Map
Target A/F MapSpark Timing Map
Automated Data Measurement

October, 2009 Ken Butts, TEMA 18
Complexity Mitigation- AUTOSAR ECU standards*
*AUTOSAR Tutorial, Oct. 2008
October, 2009 Ken Butts, TEMA 19
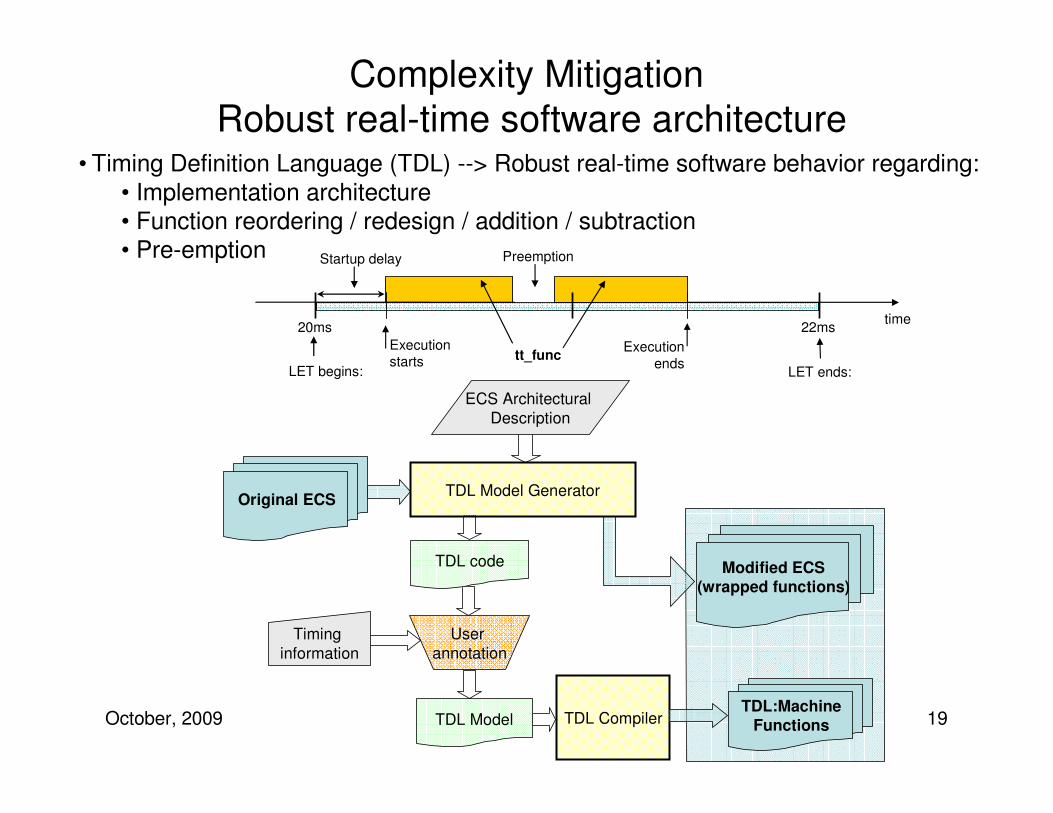
Complexity MitigationRobust real-time software architecture
• Timing Definition Language (TDL) --> Robust real-time software behavior regarding:• Implementation architecture• Function reordering / redesign / addition / subtraction• Pre-emption
20ms 22ms
LET begins:BUFFER INPUTS
LET ends:UPDATE OUTPUTS
Execution starts
Execution ends
PreemptionStartup delay
time
tt_func
ECS Architectural Description
TDL Model GeneratorOriginal ECS
TDL code Modified ECS(wrapped functions)
Timing information
User annotation
TDL Model TDL CompilerTDL:Machine
Functions

October, 2009 Ken Butts, TEMA 20
Complexity MitigationCode-based Legacy -- > Model-based Development
• Innovative Software Simulator to bring modeling and simulation capabilities to legacy design environments (CHESS)�
• Incremental model-based development• Mixed code and model components � system level analysis• Real-time software behaviors: Software execution time
• latency, jitter, schedulability• pre-emption
• ECU platform services model
+ Daniel …
plant
actuators sensors
legacy software
incremental redesign
+
-
October, 2009 Ken Butts, TEMA 21
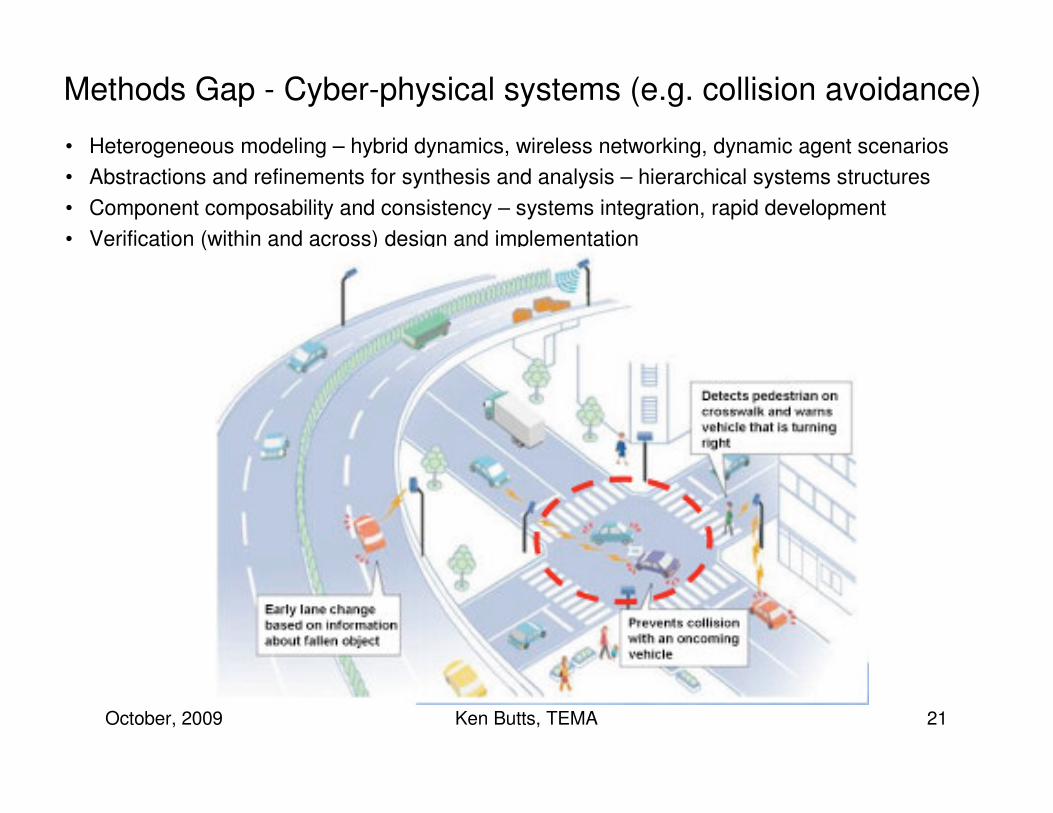
Methods Gap - Cyber-physical systems (e.g. collision avoidance)
• Heterogeneous modeling – hybrid dynamics, wireless networking, dynamic agent scenarios • Abstractions and refinements for synthesis and analysis – hierarchical systems structures• Component composability and consistency – systems integration, rapid development• Verification (within and across) design and implementation
October, 2009 Ken Butts, TEMA 22
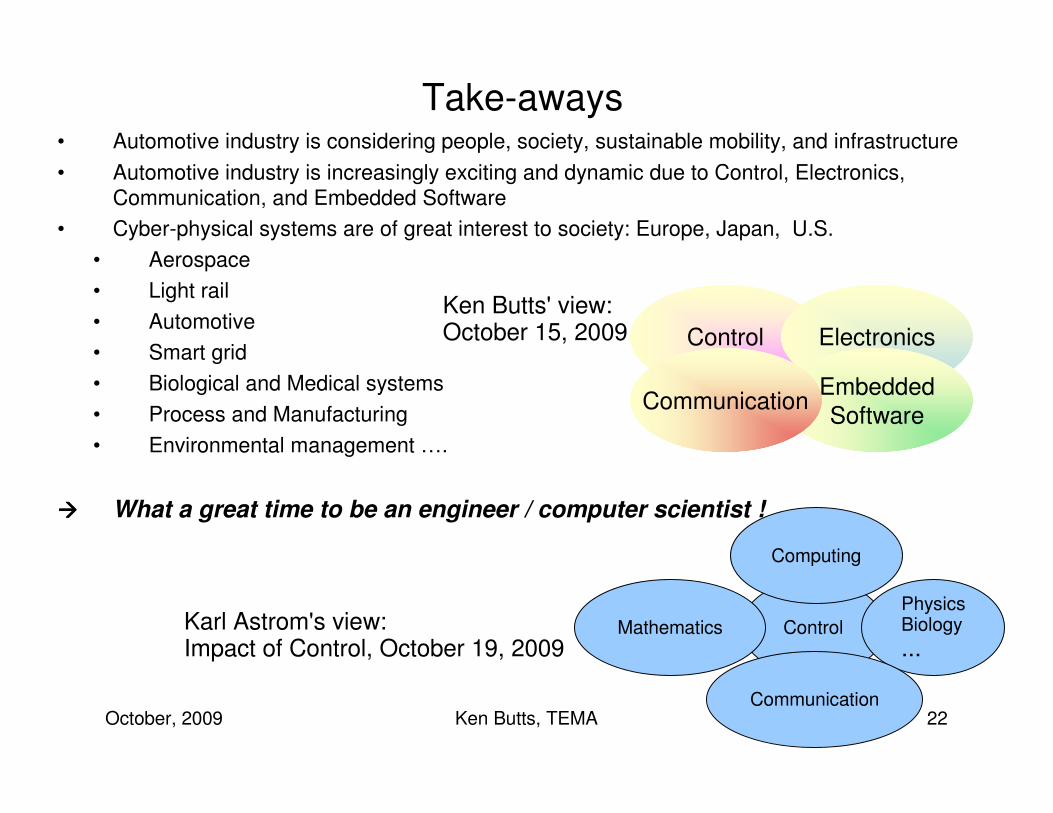
Take-aways• Automotive industry is considering people, society, sustainable mobility, and infrastructure• Automotive industry is increasingly exciting and dynamic due to Control, Electronics,
Communication, and Embedded Software • Cyber-physical systems are of great interest to society: Europe, Japan, U.S.
• Aerospace• Light rail• Automotive• Smart grid• Biological and Medical systems• Process and Manufacturing• Environmental management ….
���� What a great time to be an engineer / computer scientist !
Control Electronics
EmbeddedSoftwareCommunication
ControlPhysicsBiology...
Computing
Mathematics
Communication
Karl Astrom's view:Impact of Control, October 19, 2009
Ken Butts' view:October 15, 2009

















