Page 1
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 1/74
Sinais e SistemasEng. da Computação
Análise no Domínio do Tempo deSistemas Contínuos
Prof. Aluizio Fausto Ribeiro AraújoDepto. of Sistemas de Computação
Centro de Informática - UFPE
ES 413 Sinais e Sistemas
Capítulo 2
Page 2
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 2/74
1-2Sinais e SistemasEng. da Computação
Conteúdo• Introdução
• Resposta de Entrada Zero
• Resposta ao Impulso Unitário
• Resposta de Estado Zero
• Solução Clássica de Equações Diferenciais• Estabilidade de Sistemas
• Parâmetros e Comportamento do Sistema
Page 3
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 3/74
1-3Sinais e SistemasEng. da Computação
Análise no Tempo de SLCT (i)• Introdução
– Serão considerados sistemas diferenciais lineares para análise.
• Serão tratados sistemas lineares invariantes e contínuos notempo (LTIC), descritos por:
)()()()( :polinômio de termosem ou,
: de uso o comrescreverse-Pode .constantes são e onde
)()()()(
)()(
11
1
1
1
1
11
1
1
11
1
1
t xDPt yDQ
)x(t)bDbDbD(b)y(t)aDaDa(D
Dba
t xbdt
t dxb
dt t xd
bdt
t xd b
t yadt
dya
dt
yd a
dt
t yd
N N M
M N M
M N
N N
N N
ii
N N M
M
M N M
M
M N
N N N
N
N
N
=++++= =++++
++++=
=++++
−−
+−−
−−
−−
−
+−−
−−
−
KK
K
K
Page 4
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 4/74
1-4Sinais e SistemasEng. da Computação
Análise no Tempo de SLCT (ii)• Introdução
– Valores de M e N , contudo não deve ocorrer M>N pois:
• A expressão anterior atuaria como diferenciador (função detransferência) de ordem ( M-N ). Isto poderia levar o sistemaa instabilidade (BIBO) pois a derivada de uma entradadegrau unitário será ilimitada (função impulso unitário).
• Em geral, um sinal de ruído é rápido, gerando valores altosde derivadas. Logo o diferenciador aumenta seu efeito.
ZeroEstado de Resposta ZeroEntrada de Resposta totalResposta
:por dada é totalresposta sua linear, é definido sistema o Como
frente. para daqui assumida será hipótese Esta
. :utilizar portanto, se,-Recomenda
+=
≤ N M
Page 5
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 5/74
1-5Sinais e SistemasEng. da Computação
Resposta de Entrada Zero (i)• Resposta para Condições Internas do Sistema
– Este componente é a resposta do sistema para entrada nula.
( )( ) ( ) 0)(
0)(
que se-tementão ,0 e 0)( hipóteseporComo,
0)()()(
:forma a assume polinômio o forma, Desta
:lexponencia função de proriedade uma é Esta forma. mesma da são e
existem derivadas todaszero, emresultarlinearcombinação a Para
0)(0
21
11
1
0
11
10
02
02
00
0011
1
=−−−=∴=++++=
≠≠=++++=
=⇒=⇒=⇒=
=∴=++++
−−
−−
−−
N
N N N N
t N N
N N
t N N t t t
N N N N
Q
aaaQ
ct y
eaaact yDQ
ec(t)yDec(t)yDec(t)Dyce(t)y
(t)yDQ(t))yaDaDa(D
λλλλλλλλλλλ
λλλ
λλλ
λ
λλλλ
K
K
K
K
K
Page 6
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 6/74
1-6Sinais e SistemasEng. da Computação
Resposta de Entrada Zero (ii)• Resposta para Condições Internas do Sistema
Para raízes distintas:
t N
t t
N N
N N
N N
t N N
t N N
t t
N
N N
ececec(t)y
t yct yct ycDQ
(t)yDQ(t)yDQ(t)yDQ(t)yDQ
(t)yDQ
cccc
ect yect yect yect y
(t)yDQN
λλλ
λλλλ
+++=
=+++
======
=====
−
−
−−−
K
K
K
K
K
21
121
210
2211
121
0
121
112211
0
:por dada é geral solução a Assim,
0)]()()()[((
:se-temlinear, é sistema o Como
0)()()()(
:0)( polinômio o menteindividual satisfaz solução Cada
sarbitrária constantes são ,,,, onde
)(,)(,,)(,)(
:por dados ,0)( para soluções possíveis se-Tem
Page 7
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 7/74
1-7Sinais e SistemasEng. da Computação
Resposta de Entrada Zero (iii)• Resposta para Condições Internas do Sistema
Para raízes distintas:
sistema. do ticoscaracterís modos dos
linear combinação uma é zero entrada de respostaAcompleta. resposta na
minfluencia Estes modos.ounaturais modos ticos,caracterís modos de
chamadas são zero entrada de sistema no ,1 isexponencia As
s.autovalore e naturais sfreqüência ticos,caracterís valores
ticas,caracterís raízes de chamadas são equação desta raízes As
sistema. do ticacaracterís equação de 0)( e
sistema do ticocaracterís polinômio de )( se-chama Assim,
sistema. do ticascaracterís as com orelacionad é )( polinômio O
,N ,,ie
Q
Q
Q
t ?i K=
=λλ
λ
Page 8
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 8/74
1-8Sinais e SistemasEng. da Computação
Resposta de Entrada Zero (iv)• Resposta para Condições Internas do Sistema
Para raízes repetidas:
.) :solução e
,,,,,, :ticoscaracterís modos os tem
)()()()(
:ticocaracterís polinômio o com sistema um para Assim
.) :por dada é solução a Assim,
,,,, :ticoscaracterís modos os tem
,0)( diferencal equação a análogo, modo De
direta ãosubstituiçporprovada ,)()( solução com
,0)()2()( equação a Seja
11
1111
11
210
1
11
1210
12
0
210
02
022
0
t N
t r
t r r
t t t r t t
N r r
t r r
t r t t t
r
t
N r
N r
ececet ct c( c(t)y
eeet tee
Q
et ct c( c(t)y
et et tee
(t)yD
et cct y
(t)yD(t)yDD(t)yDQ
λλλ
λλλλλ
λ
λλλλ
λ
λλλλλλλ
λ
λλλ
++++++=
−−−=
+++=
=−+=
=−=+−=
+
+
+−
−+
−
−
KK
KK
K
K
K
Page 9
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 9/74
1-9Sinais e SistemasEng. da Computação
Resposta de Entrada Zero (v)• Resposta para Condições Internas do Sistema
Para raízes complexas:– O procedimento é o mesmo que aquele para raízes reais. Nesta
caso ter-se-á modos característicos complexos e forma desolução complexa.
– Pode-se optar por não se trabalhar com a forma complexa:
?)t (ce(t)y
eeeceeceect y
ec
cec
c
cc
ecect y
t a
t jt jt t jjt jj
jj
t jt j
+=
∴+=+=
==
+=
+−+−−+
−
−+
β
θβθβαβαθβαθ
θθ
βαβα
cos
)(222
)(
:resulta isto ,2
e 2
:conjugados são e se real é resposta a real, sistema um Para
,)(:pares aos ocorrem complexas Raízes
0
)()()()(0
21
21
)(2
)(10
Page 10
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 10/74
1-10Sinais e SistemasEng. da Computação
Resposta de Entrada Zero (vi)• Resposta para Condições Internas do Sistema
– Exemplo Calcule a resposta de entrada zero para a equação:
.55 é zero entrada de respostaA
.5,552250
000
:equações de sistema do solução a se-segue ,2
:se-calcula ,constantes asacharPara .
:por dada solução a e , :são ticoscaracterís modos os
;2,1 são ticascaracterís raízes as qual o Para
,023 é sistema do ticacarcaterís equaçãoA
.50,00 para ,)23(
20
21
210
20
10
210
20
10
2210
2210
2
21
2
002
t t
t t
t t
t t
ee(t)y
ccccecec )(y
ccecec)(y
ecec (t)y
ecec(t)y
ee
)(y)(yDx(t)y(t)DD
−−
−−
−−
−−
+−==−=⇒−=−−∴−−=−=
=+∴+==−−=
+=
−=−==++
−===++
&
&
&
λλλλ
Page 11
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 11/74
1-11Sinais e SistemasEng. da Computação
Resposta de Entrada Zero (vii)• Resposta para Condições Internas do Sistema
– Exemplo: Calcule a resposta de entrada zero para a equação:
.23 é zero entrada de respostaA
.273)3(370
3.0.30
:é equações de sistema do solução a ),3(3
:se-calcula ,constantes asacharPara .
:por dada solução a e , :são ticoscaracterís modos os
;3,3 são ticascaracterís raízes as qual o Para
,096 é sistema do ticacarcaterís equaçãoA
.70,30 para ,5396
30
2
2100
20
10
10
20
10
33210
3210
33
21
2
002
t
t t t
t
t t
t)e((t)y
cccteecec )(y
cecec)(y
teecec (t)y
t)ec(c(t)y
tee
)(y)(y)x(t)D()y(t)D(D
−
−−−
−
−−
+==⇒−=+−∴−+−=−=
=∴+==−+−=
+=
−=−==++
−==+=++
&
&
&
λλλλ
Page 12
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 12/74
1-12Sinais e SistemasEng. da Computação
Resposta de Entrada Zero (viii)• Resposta para Condições Internas do Sistema
– Exemplo: Calcule a resposta de entrada zero para a equação:
−==⇒
−=−−∴==∴+==
+−+−=+=
−−=+−=
=++==+=++
−−
−
−−+−
463,3sen2cos
5sen6cos278.1602cos0cos20
:por dada é solução a ,6sen66cos2
:se-calcula ,constantes asacharPara .6cos
:é forma na soluçãoA., :ticoscaracterís modos os ;6262 são ticascaracterís raízes As
,0404 é sistema do ticacaracterís equaçãoA
.78.160,20 para ,2404
0
00
220
20
)62()62(21
2
002
θθθ
λλ
cc
?c?c)(yc?)(ce)(y
?)t (ce?)t (ce (t)y
?)t (ce(t)y
eej?,j?
)(y)(y)x(t)(D)y(t)D(D
t t
t
t jt j
&
&
&
Page 13
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 13/74
1-13Sinais e SistemasEng. da Computação
Resposta de Entrada Zero (ix)• Resposta para Condições Internas do Sistema
– Calculando as constantes:
( ) ( )
( ) ( )
.3
6cos4 é zero entrada de respostaA
32463,3
tan
:fase de ângulo o se-Acha
.416)463,3()2(sencos
:se-temequações duas as se-Somando
)463,3(sen;)2(cos
quadrado ao termosos ambos elevando ,4633sen
2cos
20
1
22222
2222
−=−=
−
=
=∴=∴−+=+
−==−=
=
−
−
π
πθ
t e(t)y
cc?c?c
?c?c
,?c
?c
t
Page 14
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 14/74
1-14Sinais e SistemasEng. da Computação
Resposta de Entrada Zero (x)• Resposta para Condições Internas do Sistema
– Condições Iniciais na Prática• Em problemas reais, as condições iniciais devem ser
geradas a partir das situações físicas.
• As condições iniciais imediatamente anteriores a t=0 , emgeral, são diferentes das condições iniciais imediatamenteapós a aplicação da entrada.
• Imediatamente antes da aplicação da entrada, tem-se aresposta de entrada zero.
+− == 0 e 0 :Notações t t
Page 15
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 15/74
1-15Sinais e SistemasEng. da Computação
Resposta de Entrada Zero (xi)• Resposta para Condições Internas do Sistema
– Independência das Resposta de Entrada Zero e Estado Zero:• Estes dois componentes do sistema são mutuamente
independentes. Isto é, as duas respostas coexistem sem haverinterferência de uma sobre a outra.
– Condições Auxiliares para Solução de Equações Diferenciais:
• Em geral, para se determinar unicamente y(t) a partir de suaN-ésima derivada, são necessárias N informações (restrições)sobre y(t) . Tais restrições são geralmente chamadas decondições auxiliares e recebem denominação particular para
quando t=0 : condições iniciais.
Page 16
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 16/74
1-16Sinais e SistemasEng. da Computação
Resposta ao Impulso Unitário (i)• Fundamentos
– Se for conhecida a resposta de um sistema a uma entradaimpulso, pode-se determinar a resposta do sistema a uma entradaarbitrária x(t ).
– Apresenta-se um método para determinar a resposta ao impulsounitário de um sistema LTIC descrito pela equação diferencial deordem N: Q(D)y(t)=P (D)x(t ). Onde Q(D) e P (D) são polinômios,
onde . Para esta restrição, o caso mais geral é M=N .
– h(t ) é a resposta de um sistema para uma entrada impulso emt=0 , com todas as condições iniciais nulas em . Esta entradagera armazenamento de energia, implicando em condiçõesiniciais não nulas em .
N M ≤
)()(
)()(
11
10
11
1
t xbDbDbDb
t yaDaDaD
N N N N
N N N N
++++==++++
−−
−−
K
K
−
=0t
+=0t
Page 17
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 17/74
1-17Sinais e SistemasEng. da Computação
Resposta ao Impulso Unitário (ii)• Fundamentos
– Como não há entrada após o impulso ter sido aplicado, osistema responderá à condição inicial recém-criada.
– Assim, a resposta ao impulso h(t ) é formada a partir dos modoscaracterísticos do sistema:
– Em t=0 pode haver no máximo um impulso, gerando:
– Assumindo x(t ) como um impulso unitário, tem-se que
+≥= 0 ticoscaracterís modos dos termos)( t t h
0 ticoscaracterís modos dos termos(t))( 0 ≥+= t At h δ
. para 0 com ticos,caracterís modos)()(
:resposta como se-tem, para expressão a se-doSubstituin
),()()()(
00
110
11
N M bt bt h
h(t)
t bDbDbt haDaD N N N
N N N
<=+=
+++=+++ −−
δ
δKK
Page 18
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 18/74
1-18Sinais e SistemasEng. da Computação
Resposta ao Impulso Unitário (iii)• Fundamentos
– Exemplo: Calcule a resposta ao impulso para o sistema:
2;14324)32()0(
11)()0(
.4,11;15
)()()0(6)(5)()(
)()()0();()0( :impulso ao Devido
0;0 sejam e ;000 iniciais Condições
)()()(6)(5)( )()( e )()( para
)()()( :caract.) modos (só impulso ao Resposta
;3,2 065 é ticacaracterís Equação
0, como ,)1()65(
21
2120
20
1
2110
20
1
21121
121
211
21
32
21
212
02
=−=∴−=−−∴−==−−=
=+∴==+=−==⇒==+
∴+=+++⇒+==
====+=++⇒==
+=−=−=∴=++
=⇒<+=++
+
+
++−−
−−
ccccK ecech
ccK ecech
K K K K K
t t ht K t K t K
t K t K ht K h
K )(hK )h()(h)h(
t t t ht ht ht ht yt t x
t uecect h
bN M x(t)Dy(t)DD
t t
&
&&
&&&&
&&
&&&&
δδδδδ
δδδ
δδδ
λλλλ
Page 19
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 19/74
1-19Sinais e SistemasEng. da Computação
Resposta ao Impulso Unitário (iv)
• Resposta Impulso Unitário– Método de Casamento de Impulso Simplificado:
• Busca reduzir procedimento para determinar h(t ).
0)( logo ,0 Para
10,000)0 :iniciais condições
de sistema do ticoscaracterís modos doslinearcombinação é onde
,
:é unitário impulso ao resposta a
)()()()(
)()()()(
:por definido LTIC sistema o Seja
00
12
0
110
11
==⇒<=====
+=
+++=+++∴=
−−
−−
t bbN M
)(y)(y)(y(y
(t)y
(t)]u(t)[P(D)yd(t)bh(t)
h(t)
t xbDbDbt yaDaD
t xDPt yDQ
N n
N nnn
n
n
N N N
N N N
δK&
KK
Page 20
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 20/74
1-20Sinais e SistemasEng. da Computação
Resposta ao Impulso Unitário (v)
• Resposta Impulso Unitário– Exemplo: determine a resposta ao impulso h(t) .
)()2()()()()]()([)( Portanto,
),()()( onde ),()]()([)( :se-Lembre
1
1
21
0:que setemAssim,
.1)0(,0)0( :são iniciais condições As
.2)()( :Logo
2,1023:ticacaracterís eq.
),2( ordem segunda de sistema ),()()23(
2
2
1
21
21
221
221
212
2
t ueet ut yt ut yDPt h
t Dyt yDPt ut yDPt h
c
c
cc
cc
yy
ecect yecect y
??)?(?
N t Dxt yDD
t t nn
nnn
nn
t t n
t t n
−−
−−−−
+−=====
−==
⇒−−=+=−
==−−=⇒+=
−=−=⇒=++==++
&
&
&
Page 21
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 21/74
1-21Sinais e SistemasEng. da Computação
Resposta de Estado Zero (i)• Introdução
– Resposta para condições inicias nulas.– Uso do princípio da superposição para encontrar a resposta de
um sistema a um sinal de entrada arbitrário x(t ). Considere
. permanece área e )0 para Assim,
.][ altura com pulso um é ][ onde
,limlim)(
:por dado é entrada de sinal o Portanto, .
:expresso é altura com em iniciando pulso umAssim,estreitos; esretangular pulsos de somatório é Entrada
0;tem iniciando largura para ,1 básico Pulso
00
)x(n]? t [x(n?x?t
)x(n)np(t )x(n
)np(t )x(n
)n)p(t x(nt x
x(t))n)p(t x(n
)x(nnt x(t)
? t p(t)
ττττττ
τττ
τττ
ττττ
ττ
ττ
∆∞→⇒→∆∆∆−∆∆
∆∆−∆∆=∆−∆=
∆−∆∆∆=
==
∑∑ →∆→∆
Page 22
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 22/74
1-22Sinais e SistemasEng. da Computação
Resposta de Estado Zero (ii)
• Introdução
∑∑
∑
∆−→∆−∆−→∆−
∆−→∆−→→
∆∆−∆=→∆∆−∆
→→
→∆
t ? t
t ? t
?t nh(t x(n??t nd(t x(n?
n?t]h(t [x(n?xn?t]d(t [x(n?x
nt hnt
t ht
(y(t))(x(t))
x(t)
nt nxt x
nt nx
))lim ))lim
)) ))
)( )(
)( )(
Saída Entrada
: entrada a para saída-entradaparo se-Encontra
)()(lim)( Logo,
0 para ),()(:impulso do se-aproxima pulso O
00
0
ττττ
ττττδ
δ
ττδτ
ττδτ
ττ
Page 23
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 23/74
1-23Sinais e SistemasEng. da Computação
Resposta de Estado Zero (iii)• Introdução
– Esta é a resposta do sistema y(t ) para uma entrada arbitrária x(t)em termos da resposta ao impulso h(t ). Logo, conhecendo-se esteúltimo, pode-se determinar y(t ) para qualquer entrada.
• Note que a resposta do sistema para qualquer entrada édeterminada pela resposta ao impulso, que por sua vez, é
construída a partir dos modos característicos do sistema.
∫ ∑
∞
∞−
→
−=
∴∆−=
τττ
τττ
d t hxy(t)
n?)h(t x(n?y(t)t
? t
)()(
)lim :Portanto0
Page 24
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 24/74
1-24Sinais e SistemasEng. da Computação
Resposta de Estado Zero (iv)• Introdução
Page 25
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 25/74
1-25Sinais e SistemasEng. da Computação
Resposta de Estado Zero (v)• Integral de Convolução
– A integral de convolução de duas funções é definida como:
)()]()([)]()([)(:aAssociativ ePropriedad
)()()()()]()([)(
:vaDistributi ePropriedad
)()()()()()()()( variávela mudando se-prova
)()()()(
:Comutativa ePropriedad
:relevantes espropriedad com,)()()()(
321321
3121321
12122121
1221
2121
t xt xt xt xt xt x
t xt xt xt xt xt xt x
t xt xdzzt xzxdzzxzt xt xt xdzd t z
t xt xt xt x
d t xxt xt x
∗∗=∗∗
∗+∗=+∗
∗=−=−−=∗−=⇒−=
∗=∗
−=∗
∫ ∫
∫
∞
∞−
∞−
∞
∞
∞−
ττ
τττ
Page 26
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 26/74
1-26Sinais e SistemasEng. da Computação
Resposta de Estado Zero (vi)• Integral de Convolução
. é )( de duração e é )( e )( de (largura) Duração
:Largura da ePropriedad
)()()( :Impulso um com Convolução
)()()(
e )()()()()(
logo ),()()( para :toDeslocamen de ePropriedad
212121
212211
2121
21
T T t cT T t xt x
t xt t x
T T t cT t xT t x
T t ct xT t xT t xt x
t ct xt x
+⇒
=∗
−−=−∗−−=∗−=−∗
=∗
δ
Page 27
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 27/74
1-27Sinais e SistemasEng. da Computação
Resposta de Estado Zero (vii)• Integral de Convolução
.0pordenotato que mesmo integral da o será oconsiderad limite O
0 ,0
0,)()()()()()()(
entrada; da início o após iniciada é só respostaA-
zero estado com e causal sistema Para
)()()()()(
:eCausalidad e ZeroEstado de Resposta
00
<≥−=−=∗=
−=∗=
∫ ∫
∫
−−
∞
∞−
t
t d t xhd t hxt ht xt y
d t hxt ht xt y
t t ττττττ
τττ
Page 28
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 28/74
1-28Sinais e SistemasEng. da Computação
Resposta de Estado Zero (viii)• Integral de Convolução
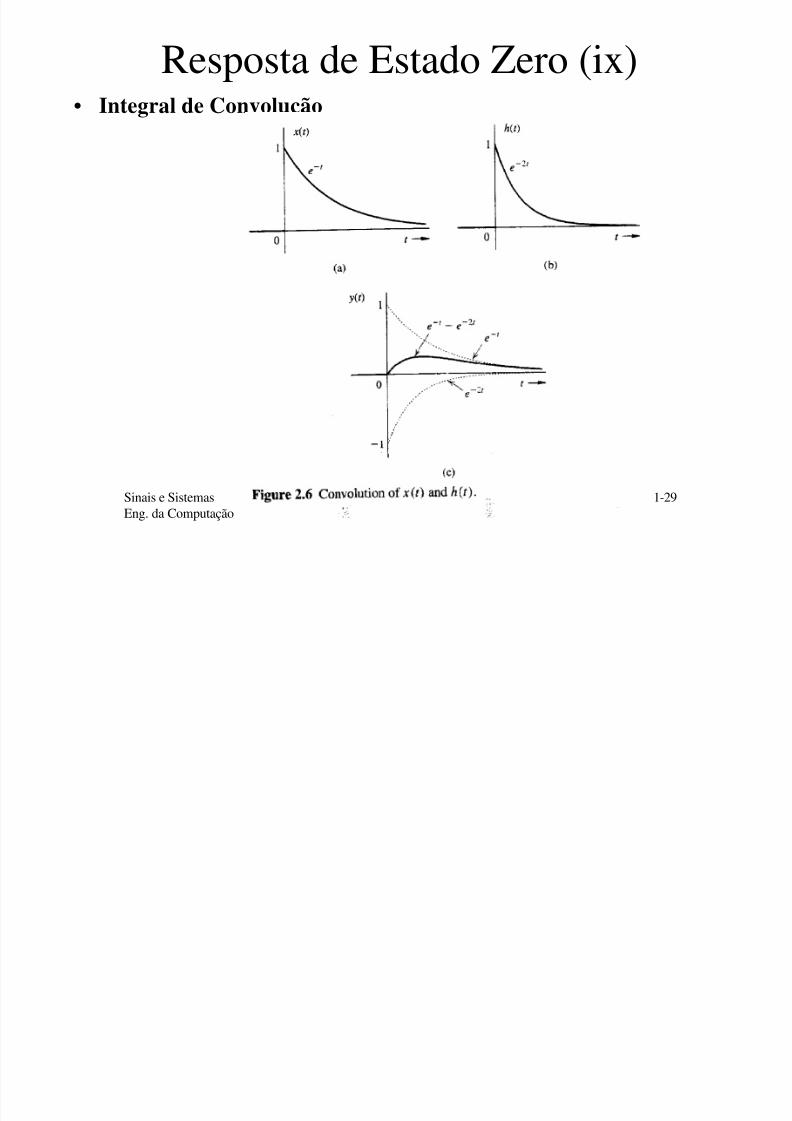
– Exemplo: Considere um sistema LTIC cuja resposta ao impulsoh(t ) é dada abaixo. Determine a resposta y(t ) para a entrada x(t ).
)()()( então ,0 para 0)( que Lembrando
0,)1()(
0,)(
:tornase integral a assim ,0,)()()(
:que se-temlogo causais, são sinais os Ambos
)()();()(
2
22
0
22
0
)(2
0
2
t ueet yt t y
t eeeed eeet y
t d eet y
t d t hxt y
t uet xt uet h
t t
t t t t t t
t t
t
t t
−−
−−−−−
−−−
−−
−=<=≥−=−==
≥=
≥−=
==
∫ ∫ ∫
τ
τ
τττ
ττ
ττ
Page 29
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 29/74
1-29Sinais e SistemasEng. da Computação
Resposta de Estado Zero (ix)• Integral de Convolução
Page 30
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 30/74
1-30Sinais e SistemasEng. da Computação
Resposta de Estado Zero (x)• Integral de Convolução
d d ( )
Page 31
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 31/74
1-31Sinais e SistemasEng. da Computação
Resposta de Estado Zero (xi)• Integral de Convolução
Page 32
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 32/74
1-32Sinais e SistemasEng. da Computação
Resposta de Estado Zero (xii)• Integral de Convolução
– Resposta a Entradas Complexas: Para um sistema LTIC real ( h(t )real) então a parte real da entrada gera uma resposta realenquanto que a parte imaginária gera uma resposta imaginária.As duas respostas são somadas para gerar a resposta completa.
– Resposta a Entradas Múltiplas: Aplica-se o princípio dasuperposição. Cada entrada é considerada separadamente e a
soma das saídas individuais determina a saída total dos sistema.
)()()(
)(*)()(*)()]()([*)()(
se-temreal, sendo )( para ,)()()(
t jyt yt y
t jxt ht xt ht jxt xt ht y
t ht jxt xt x
ir
ir ir
ir
+=∴+=+=
+=
Page 33
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 33/74
1-33Sinais e SistemasEng. da Computação
Resposta de Estado Zero (xiii)• Integral de Convolução: Solução Gráfica
– Possibilita interpretação gráfica que é útil para avaliar a integralde convolução de sinais complexos.
– Permite a visualização do resultado da integral, freqüentementeútil para tarefas tais como amostragem ou filtragem.
– Viabiliza o cálculo da integral para sinais que não possuam
descrição analítica, mas apenas gráfica.– Note que a integral não se faz com respeito a t , que é apenas um
parâmetro do processo (e não a variável independente).
– A integral de convolução só existe para o período de tempo emque a moldura móvel coexiste com o gráfico fixo.
– Pode-se calcular graficamente x(t )*g (t ) ou g(t )*x(t ).
R d E d Z ( i )
Page 34
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 34/74
1-34Sinais e SistemasEng. da Computação
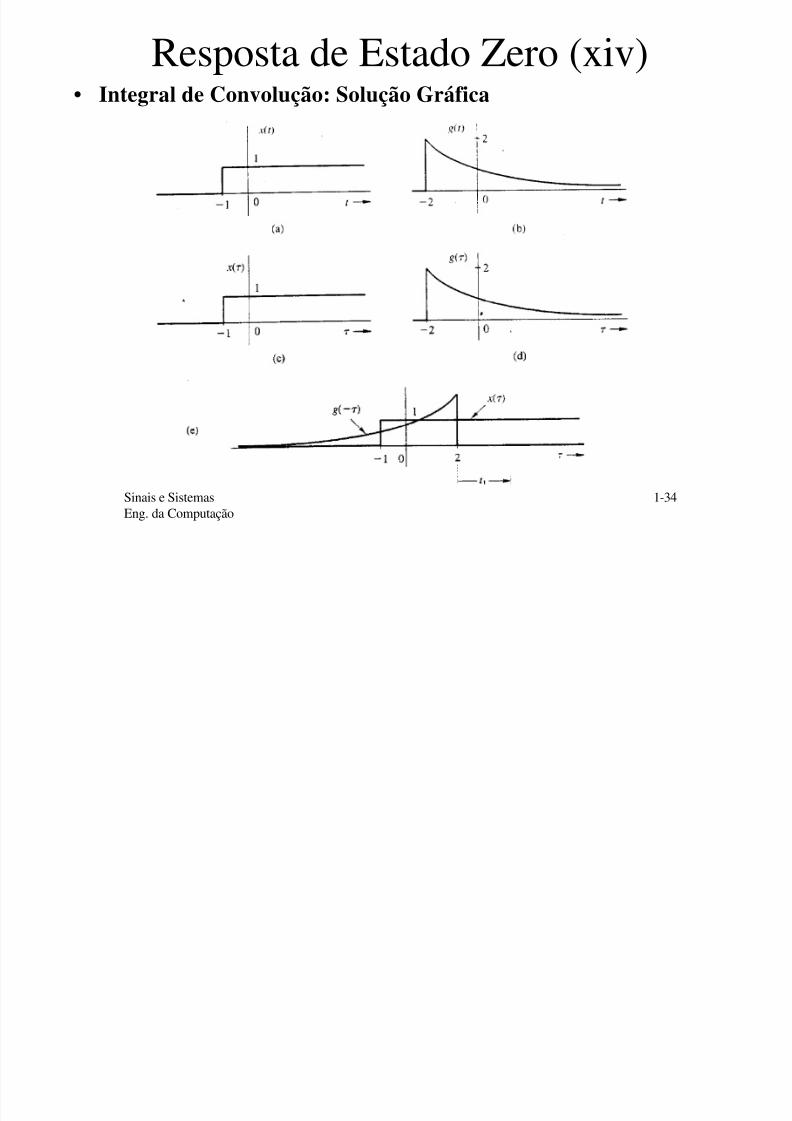
Resposta de Estado Zero (xiv)• Integral de Convolução: Solução Gráfica
R d E d Z ( )
Page 35
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 35/74
1-35Sinais e SistemasEng. da Computação
Resposta de Estado Zero (xv)• Integral de Convolução: Solução Gráfica
Page 36
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 36/74
1-36Sinais e SistemasEng. da Computação
Resposta de Estado Zero (xvi)• Integral de Convolução: Solução Gráfica
– Procedimento Gráfico:
. para )(obterpara , eixo o sobre moldura a deslocando to,procedimen o Repita 5.
. para convolução de
integral davaloro )( é )( e )( de produto o sob áreaA4.
.)(obterpara problema) do tempode unidade (em poreixo do longo ao )( Desloque 3.
.)(obterpara verticaleixo do tornoem moldura
a Rotacione rígida. moldura uma como )( função a Visualize 2.
fixa. )( função a Mantenha 1.
0
00
0
0
t t c
t t
t ct gx
t gt g
g
g
x
∀
=−
−−
−
τ
τττ
ττ
τττ
Page 37
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 37/74
1-37Sinais e SistemasEng. da Computação
Resposta de Estado Zero (xvii)• Integral de Convolução: Solução Gráfica
– Exemplo: Determine graficamente a y(t )= x (t )*h (t ).
)()()( Logo,
0,)1()(
logo, ,)(,)( :convoluir a funções As
0,00,)()()(
:0 parasobreporse vãosó sconvoluída serem a funções as Como
)()(),()(
2
22
00
2)(2
)(2
0
2
t ueet y
t eeeed eed eet y
et hex
t t d t hxt y
t
t uet ht uet x
t t
t t t t t t t t
t
t
t t
−−
−−−−−−−
−−−
−−
−=≥−=−===
=−=<≥−=
>==
∫ ∫
∫
ττ
ττ
τττ
τττ
ττ
Page 38
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 38/74
1-38Sinais e SistemasEng. da Computação
Resposta de Estado Zero (xviii)• Integral de Convolução: Solução Gráfica
– Exemplo:
Resposta de Estado Zero (xix)
Page 39
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 39/74
1-39Sinais e SistemasEng. da Computação
Resposta de Estado Zero (xix)• Integral de Convolução: Solução Gráfica
– Exemplo:
Page 40
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 40/74
1-40Sinais e SistemasEng. da Computação
Resposta de Estado Zero (xx)• Integral de Convolução: Solução Gráfica
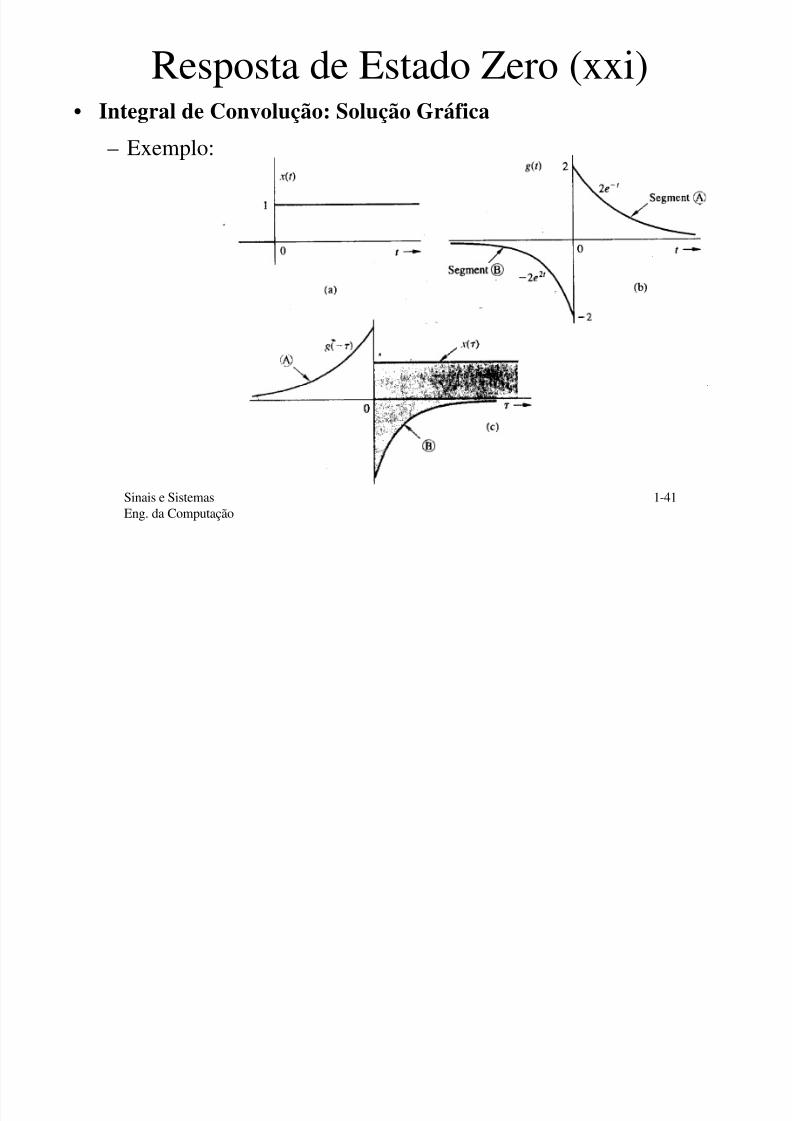
– Exemplo: Determine graficamente a y(t )= x (t )*h (t ).
t t
t
t t t
t t
t
t
t
t
eet c
d ed ed t gxt c
t
ed ed t gd t gxt c
t
t ue
t uet g
t ue
t uet gt ut x
−−
∞ −−−∞
∞ −∞∞
−
−−−
−=−−=∴−+=−=
≥≥−=−=−=−=
≥<+−−
−=−⇒−−
==
∫ ∫ ∫
∫ ∫ ∫
211)1(2)(
)2(12.1)()()(
:0 para ocorre ãosuperposiç a ,0 para Cálculo
2)()()()(
:0 para ocorre ãosuperposiç a ,0 para Cálculo
)(2
)(2)(
)(2
)(2)(),(1)(
)(2
0
)(
0
2
0
)(2
00
)(2
)(
2
τττττ
τ
ττττττ
ττ
ττ
ττ
τ
τ
τ
Page 41
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 41/74
1-41Sinais e SistemasEng. da Computação
Resposta de Estado Zero (xxi)• Integral de Convolução: Solução Gráfica
– Exemplo:
Resposta de Estado Zero (xxii)
Page 42
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 42/74
1-42Sinais e SistemasEng. da Computação
Resposta de Estado Zero (xxii)• Integral de Convolução: Solução Gráfica
– Exemplo:
Resposta de Estado Zero (xxiii)
Page 43
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 43/74
1-43Sinais e SistemasEng. da Computação
Resposta de Estado Zero (xxiii)• Integral de Convolução: Solução Gráfica
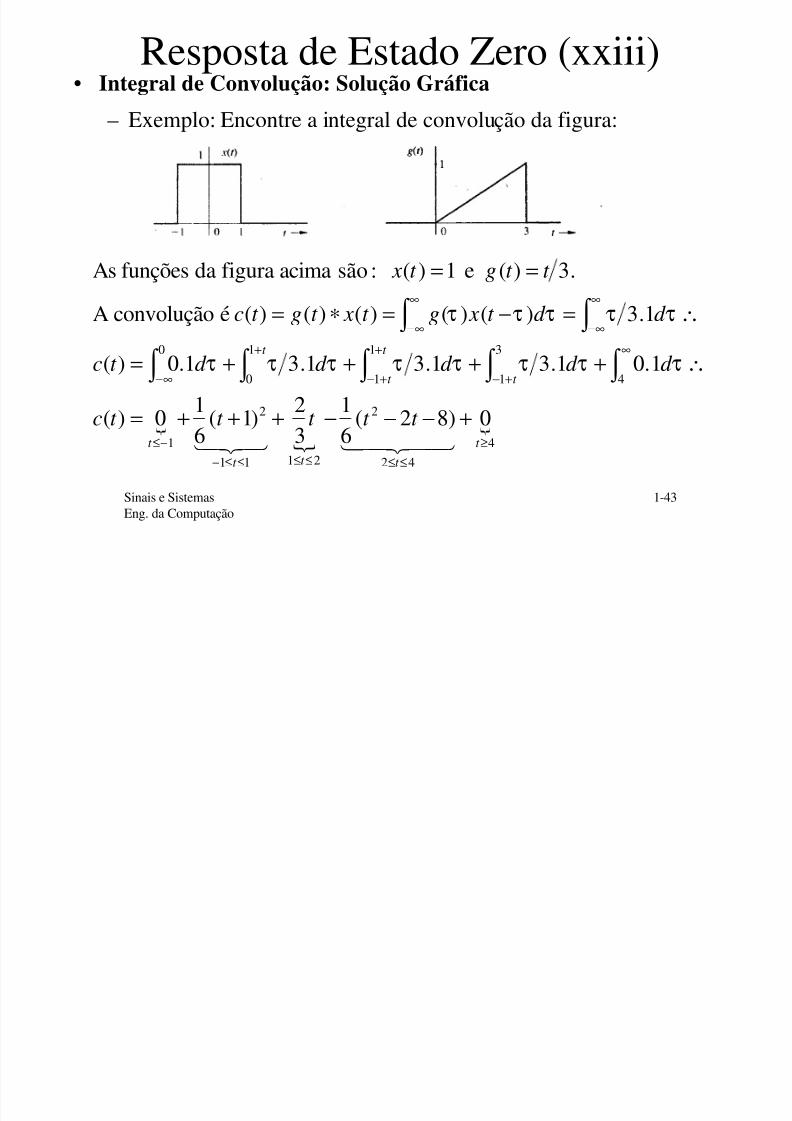
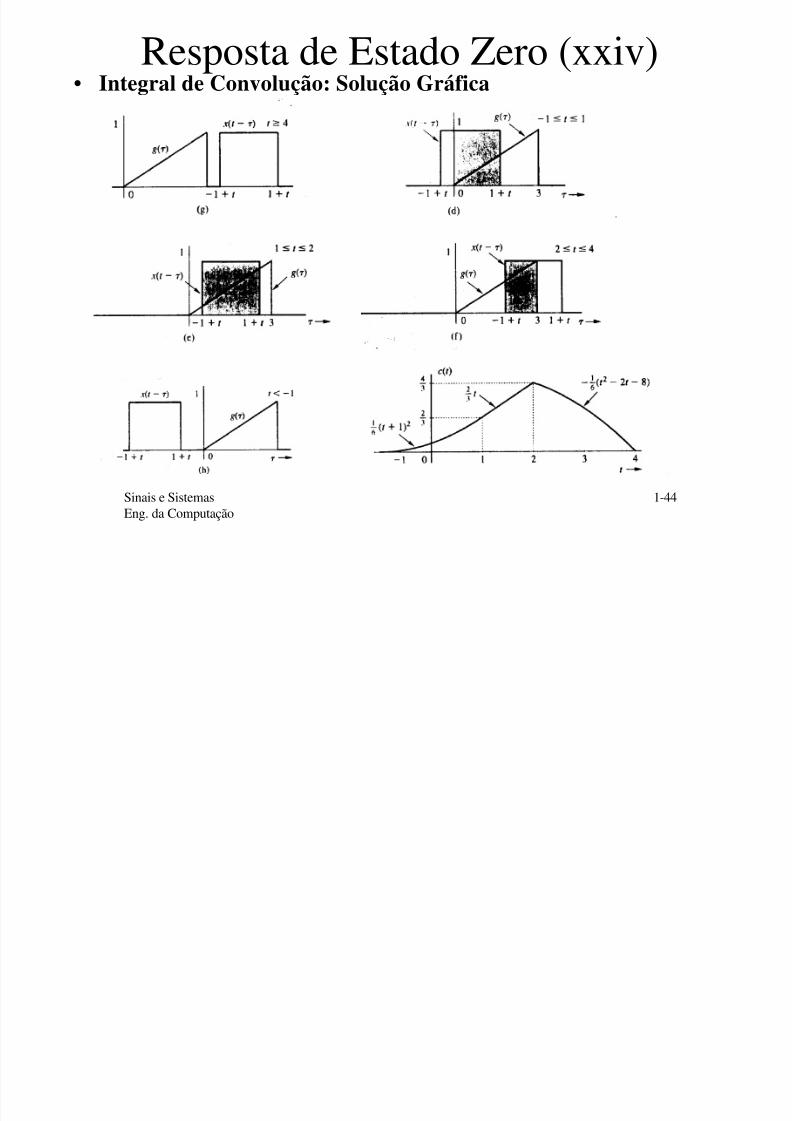
– Exemplo: Encontre a integral de convolução da figura:
4
42
2
2111
2
1
4
3
1
1
1
1
0
0
0)82(61
32
)1(61
0)(
1.01.31.31.31.0)(
1.3)()()()()( é convoluçãoA
.3)( e 1)( :são acima figura da funções As
≥≤≤≤≤≤≤−
−≤
∞
+−
+
+−
+
∞−
∞
∞−
∞
∞−
+−−−+++=
∴++++=
∴=−=∗===
∫ ∫ ∫ ∫ ∫ ∫ ∫
t
t t t
t
t
t
t
t
t t t t t c
d d d d d t c
d d t xgt xt gt c
t t gt x
4 434 42143421
ττττττττ
τττττ
Resposta de Estado Zero (xxiv)
Page 44
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 44/74
1-44Sinais e SistemasEng. da Computação
Resposta de Estado Zero (xxiv)• Integral de Convolução: Solução Gráfica
Resposta de Estado Zero (xxv)
Page 45
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 45/74
1-45Sinais e SistemasEng. da Computação
Resposta de Estado Zero (xxv)• Integral de Convolução: Solução Gráfica
– Largura da função convoluída: O tempo (largura) que um sinal de
duração T 1 leva para passar completamente por um outro sinal deduração T 2, tempo em que estes sinais tenham algumasuperposição, é dado por T 1 + T2.
– Papel de funções sem existência física: Estas, analiticamentetratáveis como a função impulso ou a função exponencial
incessante, produzem conhecimento sobre o comportamento dosistema e sua resposta a entradas arbitrárias.
Resposta de Estado Zero (xxvi)
Page 46
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 46/74
1-46Sinais e SistemasEng. da Computação
Resposta de Estado Zero (xxvi)
– Sistema complexo
composto porsubsistemas maissimples e portantomais facilmentecaracterizados.
Vai-se considerardois tipos deinterconexões:cascata e paralela.
• Integral de Convolução: Sistemas Interconectados
Resposta de Estado Zero (xxvii)
Page 47
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 47/74
1-47Sinais e SistemasEng. da Computação
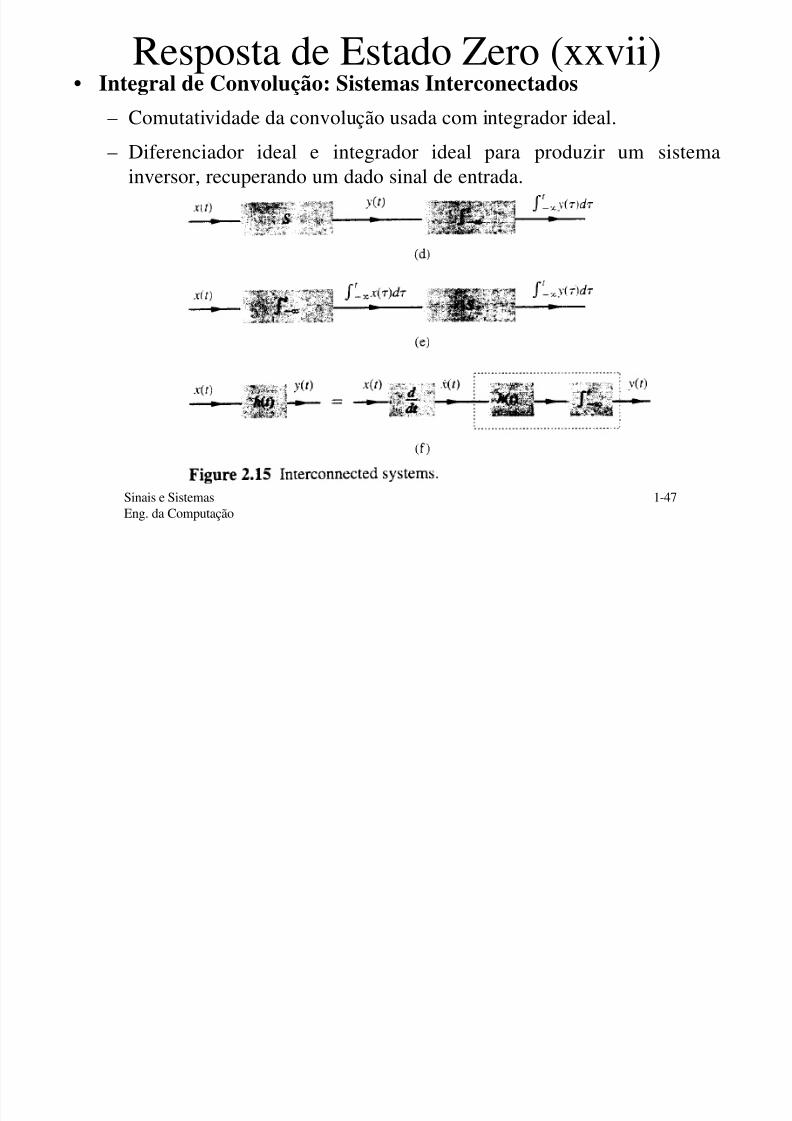
Resposta de Estado Zero (xxvii)• Integral de Convolução: Sistemas Interconectados
– Comutatividade da convolução usada com integrador ideal.
– Diferenciador ideal e integrador ideal para produzir um sistemainversor, recuperando um dado sinal de entrada.
Resposta de Estado Zero (xxviii)
Page 48
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 48/74
1-48Sinais e SistemasEng. da Computação
Resposta de Estado Zero (xxviii)• Integral de Convolução: Função Exponencial Incessante
– Função característica: Entrada para qual um sistema responde damesma forma, a exponencial é o único caso.
)( st e
(st)
s
st
sst t sst
st
sH
ssH
d ehsH
esH t yd ehed ehet ht y
t ys
et h
exp incessante entrada
)(
entrada de sinalsaída de sinal
)(:nciatransferêde Função
. devalordado um para constante uma é )(
finita. integral para válido,)()( onde
LTI sistema todode lfundamenta epropriedad uma é esta ,)()()()()()(
:é )( sistema do resposta a então complexa) variáveluma é (
entrada sua e )( impulso ao resposta sua sejam sistema, um Para
=
∞
∞−−
∞
∞−−∞
∞−−
=
==
∴==∗=
∫ ∫ ∫
ττ
ττττ
τ
ττ
Resposta de Estado Zero (xxix)
Page 49
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 49/74
1-49Sinais e SistemasEng. da Computação
• Integral de Convolução: Função Exponencial Incessante
– A função de transferência, em geral, só tem sentido para sistemaLTIC. Tal função pode ser expressa em termos de polinômio:
)( st e
)()(
)( é nciatransferêde função a que se-Conclui
)()()()( Como
)(])()[( :polinômio de forma na
resposta, sua e incessante lexponencia a se-doConsideran
sQsP
sH
esQeDQesPeDPes
dt ed eD
eDPeDQsH
st st
st st
st r r
st r st r
st st
=
==⇒==
=
Resposta de Estado Zero (xxix)
Resposta de Estado Zero (xxx)
Page 50
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 50/74
1-50Sinais e SistemasEng. da Computação
Resposta de Estado Zero (xxx)• Integral de Convolução: Resposta Total
– Resposta total = Resposta entrada-zero + Resposta estado-zero=
0,)15205()55( totalcorrente
)(10)(,5.0,3,1
corrente, a é saída tensão,de fonte é entrada :RLC circuito :Exemplo
distintos. sautovalore de caso o consideraseguira discussãoA
distintos sautovalore para ,)()(
distintos e repetidos sautovalore para ,)()(
zero estado
32
zero entrada
2
3
N
1k
N
1k
R
1k
1
≥−+−++−=
==Ω==
∗+
∗++
−−−−−
−
=
+==
−
∑∑∑
t eeeee
t uet xF C RH L
t ht xec
t ht xecet c
t t t t t
t
t k
R
t k
t k k
k
k k
4 4 4 4 34 4 4 4 214 4 34 4 21
λ
λλ
Resposta de Estado Zero (xxxi)
Page 51
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 51/74
1-51Sinais e SistemasEng. da Computação
p ( )• Integral de Convolução: Resposta Total
0,)15()2510( totalcorrente15)205()55( totalcorrente
)15205()55( totalcorrente
)( forçada respota
3
)( natural resposta
2
322
322
≥−++−= ∴−++−−=
∴−+−++−=
−−−
−−−−−
−−−−−
t eeeeeeee
eeeee
t y
t
t y
t t
t t t t t
t t t t t
n
434214 4 34 4 21φ
Solução Clássica de Equações Diferenciais (i)
Page 52
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 52/74
1-52Sinais e SistemasEng. da Computação
• Introdução
– Soluciona-se com componente natural e componente forçado.Para análise e síntese de sistemas este método possui perdas.
• A resposta natural do sistema (solução homogênea ousolução complementar) é formada por todos os termosenvolvendo os modos característicos do sistema.
• A resposta forçada do sistema (solução particular) compõe-sedos termos que não envolvem os modos característicos.
==
∴=+
⇒+==
)()()()(
0)()()()()]()()[(
)()()( totalresposta
t xDPt yDQ
t yDQt xDPt yt yDQ
t yt yt y
nn
n
φφ
φ
Solução Clássica de Equações Diferenciais (ii)
Page 53
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 53/74
1-53Sinais e SistemasEng. da Computação
ç q ç ( )
• Resposta Forçada
Método dos coeficientes indeterminados– Método simples de ser calculada para entradas que produzem
número finito de derivadas independentes. Casos importantessão:
• Função exponencial: As derivadas são da mesma tipo.
• Polinômio em t : As derivadas são polinômios em t .
– A resposta forçada é portanto uma combinação linear da funçãode entrada ( x(t )) e suas derivadas.
igualdade. da lados dois dos termosse-igualando calculados
são osdeterminad não escoeficient os ),()()()( t xDPt yDQ =φ
Solução Clássica de Equações Diferenciais (iii)
Page 54
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 54/74
1-54Sinais e SistemasEng. da Computação
• Resposta Forçada
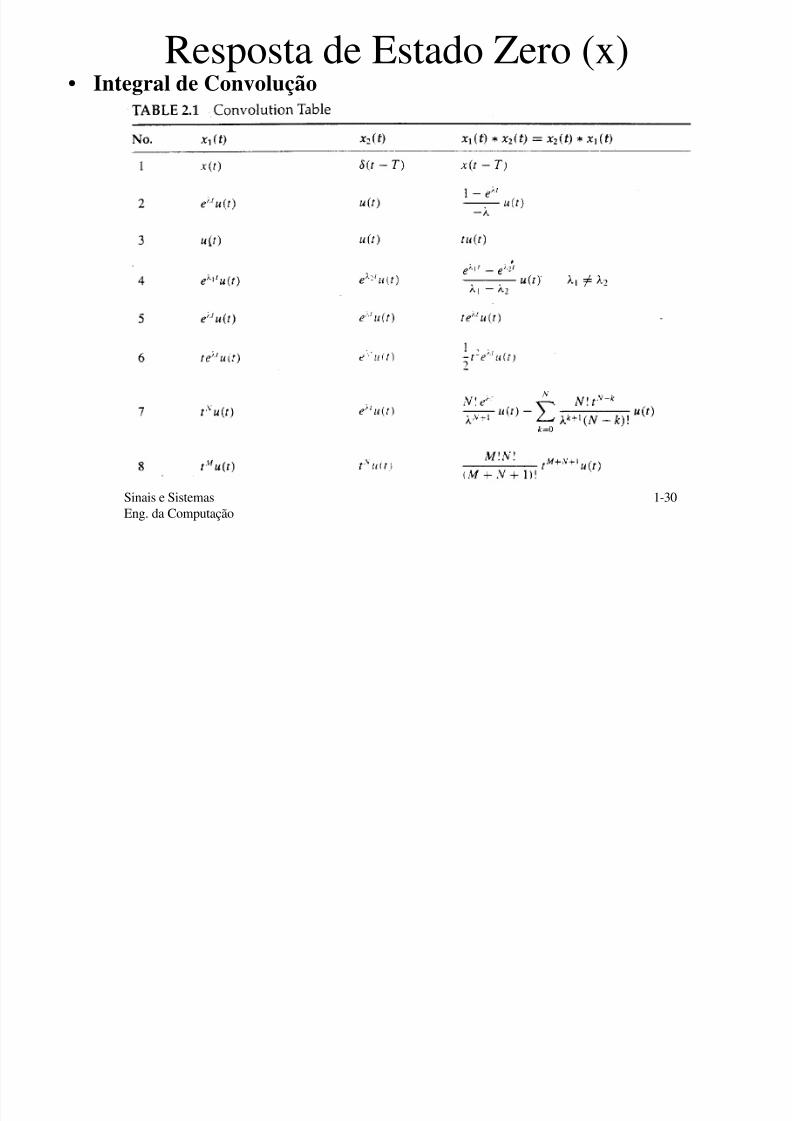
Método dos coeficientes indeterminados– A tabela mostra algumas funções de entrada e a saída forçada:
t ?r
r
r
r
t ?r
r
r
t ?i
t ?
t ?i
t ?
et t t et t t
t t
k
teN ,,(i??,e
eN ,,(i??,e
)( )(
)cos( )cos(
constante)valor(um
),21
),21
Saída Entrada
01
1
101
1
1ββββααα
θωβθωββ
β
++++++++++
===≠
−
−
−
−KK
K
K
Solução Clássica de Equações Diferenciais (iv)
Page 55
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 55/74
1-55Sinais e SistemasEng. da Computação
• Resposta Forçada
==
=
∴=++ =+
=∴+=+++++∴
∴=++++=
≥+=++=++
==++==++
−−
++
11
0
5232262
02
52)(2)2(32
)()()23( :se-temacima polinômio o Para
)( é forçada resposta a acima, )( Para
0,)(
:assim ,)2)(1(23 :ticocaracterís Polinômio
.3)0(,2)0( e ,35)( entrada uma para
)()()23( :ldiferencia equação a Resolva :Exemplo -
0
1
2
210
21
2
012
2122
02
01
2
2
221
2
2
2
ββ
β
βββββ
β
ββββββ
βββ
λλλλ
φ
t t t t
t Dxt yDD
t t t yt x
t eK eK t y
yyt t t x
t Dxt yDD
t t n
&
Solução Clássica de Equações Diferenciais (v)
Page 56
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 56/74
1-56Sinais e SistemasEng. da Computação
• Solução Clássica de Equações Diferenciais: Resposta Forçada
– Este requer condições para t imediatamente após o instante t=0 ,
porque no instante imediatamente anterior a t=0 , apenas ocomponente de entrada zero existe.
0134)( que se-temFinalmente
34
123120 Para
12)(
01)()()(
:são derivada sua e completa soluçãoA
0,1)( é forçada soluçãoA
2
2
1
21
21
221
221
≥++−=−==∴+−−= ++=⇒=
+−−=≥+++=+=
≥+=
−−
−−
−−
t t eet y
K K
K K K K t
eK eK t y
t t eK eK t yt yt y
t t t y
t t
t t
t t n
&
φ
φ
Solução Clássica de Equações Diferenciais (v)
Page 57
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 57/74
1-57Sinais e SistemasEng. da Computação
• Resposta Forçada
– Sinal exponencial é do mesmo tipo.
.auxiliares condições pelas calculadas são constantes as onde
,)()( :é )( para sistema do totalResposta
0)()(
por dada é forçada resposta a ,)()( entrada a Para
)()()(
)()(
)()( e )()( :ementeConsequent
que se-lembre ,)(])[(
1
j
t N
j
t j
t
t
t t
t t t t
t r t r t t
K
eH eK t yt x
t eH t y
t uet x
H QP
ePeQ
ePeDPeQeDQ
eeDeDPeDQ
j ζλ
ζφ
ζ
ζζ
ζζζζ
ζζζζ
ζ
ζ
ζζζβζζβ
ζζ
ζβ
∑=
=
⇒≥==
==∴=
⇒====
Solução Clássica de Equações Diferenciais (vi)
Page 58
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 58/74
1-58Sinais e SistemasEng. da Computação
• Resposta Forçada
– O método clássico, por vezes, é relativamente simples quandocomparado com o método para encontrar os componentes comentrada e estado zero. Contudo, o método clássico apresenta osseguintes problemas:
• Geração de resposta completa, não permitindo a identificação
de cada componente da resposta.• Impossibilidade de ser aplicado a qualquer classe de entradas
(lembre-se da restrição com respeito às derivadas de x(t )).
• As condições auxiliares são definidas para o instanteimediatamente após o zero.
Estabilidade de Sistemas (i)
Page 59
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 59/74
1-59Sinais e SistemasEng. da Computação
• Estabilidade BIBO– Exemplo ilustrativo: Um cone acomodado em um de seus
estados de equilíbrio (estados em que o cone pode permanecerpara sempre): colocado sobre sua base circular (i), sobre seuvértice no cume (ii) e sobre sua lateral (iii). Se levementeperturbado em seu estado atual, o cone:
• O cone no estado (i) retorna à sua posição original após aperturbação: Equilíbrio estável.
• O cone no estado (ii) move-se cada vez para mais distante deseu estado original: Equilíbrio instável.
• O cone no estado (iii) nem move-se para mais distante de seuestado original nem volta a seu estado de equilíbrio:Equilíbrio neutro.
• Pequenas perturbações causam resposta pequena (equilíbrioestável) ou respostas ilimitadas (equilíbrio instável).
Estabilidade de Sistemas (ii)
Page 60
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 60/74
1-60Sinais e SistemasEng. da Computação
• Estabilidade BIBO
– Se toda entrada limitada produzir saída limitada no sistema, esteé dito estável BIBO. Em contraste, se alguma entrada limitadaresultar em resposta ilimitada o sistema é definido com instávelBIBO.
estável. BIBO é sistema o então ,integrável nteabsolutamefor)( a Se
.)(
é BIBO deestabilida para suficiante e necessária condição a Logo
,)()()( logo limitada, é )( Como
,)()()()()()()()(
LTIC sistema um Para
11
t h
d h
d hK t yK t xt x
d t xht yd t xht xt ht y
∞<
≤⇒∞<<−−≤⇒−=∗=
∫
∫ ∫ ∫
∞
∞−
∞
∞−
∞
∞−
∞
∞−
ττ
τττ
ττττττ
Estabilidade de Sistemas (iii)
Page 61
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 61/74
1-61Sinais e SistemasEng. da Computação
• Estabilidade BIBO– A condição é necessária mas não suficiente, pois se M>N
então o sistema é instável (derivação de função impulso).– Este é um critério de estabilidade externa pois pode ser
verificada a partir de medidas nos terminais externos.
– A estabilidade externa (BIBO) pode não indicar corretamente aestabilidade interna. Nem sempre o comportamento interno deum sistema pode ser verificado a partir dos terminais externos.
• Existe equivalência entre estabilidade interna e externa parasistema que é controlável (pode-se controlar seu estado apartir de entradas externas) e observável (sabe-se o estado apartir do monitoramento da saída).
• A estabilidade interna implica na estabilidade externa.
N M ≤
Estabilidade de Sistemas (iv)
Page 62
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 62/74
1-62Sinais e SistemasEng. da Computação
• Estabilidade Interna (Assintótica)– Um sistema LTI e causal é internamente estável se ele
permanecer em um dado estado (estado de equilíbrio)indefinidamente, na ausência de entrada externa.
• Todo modo característico de um sistema estável surgido comoresultado de condições iniciais diferentes de zero, deve tendera zero quando o tempo tende a infinito.
• Se ao menos um dos modos, crescer com o passar do tempo, osistema é rotulado como instável.
• Se alguns modos nem decrescem a zero nem crescemindefinidamente, enquanto outros modos decrescem a zero,este é um sistema marginalmente estável.
• A estabilidade interna é também chamada de estabilidadeassintótica ou estabilidade no sentido de Lyapunov.
Estabilidade de Sistemas (v)
Page 63
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 63/74
1-63Sinais e SistemasEng. da Computação
• Estabilidade Interna (Assintótica)
instável. sistema o tornamrepetidas simaginária raízes queobservarCabe
.,0Re para quando senoides geram modos
se estável nteMarginalme -
.0Re/ , quando modos
se Instável -
.,0Re para quando 0 modos
se estável amenteAssintotic -
:é sistema o que se-tem, e forma da icoscarcteríst modos Para
interna. deestabilida a determinam ticascaracterís raízes das olocalizaçã a
),()()()( :polinômio pelo definido LTIC sistema um Seja
k k
k K
k k
t t
t
t
t
tee
t xDPt yDQ
k k
λλ
λλ
λλ
λλ
∀=∞→
>∃∞→∞→∀<∞→→
=
Estabilidade de Sistemas (vi)
Page 64
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 64/74
1-64Sinais e SistemasEng. da Computação
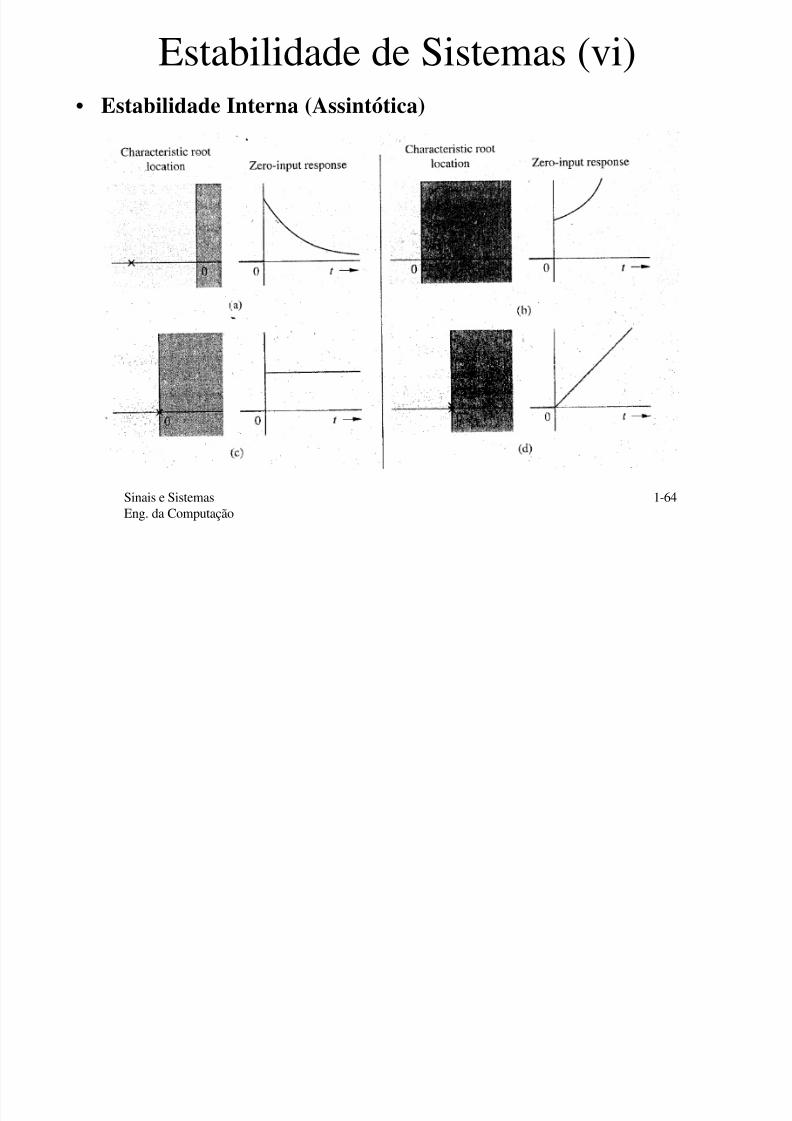
• Estabilidade Interna (Assintótica)
Estabilidade de Sistemas (vii)
Page 65
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 65/74
1-65Sinais e SistemasEng. da Computação
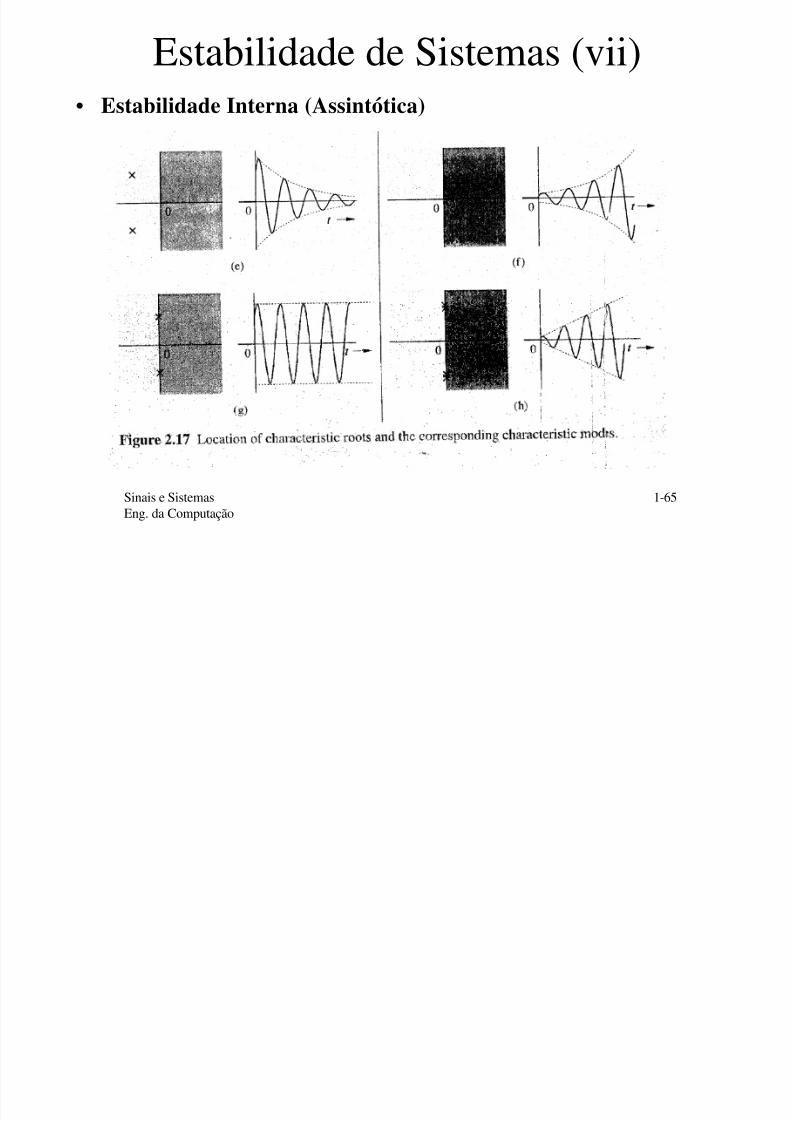
• Estabilidade Interna (Assintótica)
Estabilidade de Sistemas (viii)E bilid d I (A i ó i )
Page 66
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 66/74
1-66Sinais e SistemasEng. da Computação
• Estabilidade Interna (Assintótica)
– Sumário:
• Um sistema LTIC é assintoticamente estável, se e só se, todassuas raízes características (autovalores), distintas ou comrepetição, estão no semiplano esquerdo.
• Um sistema LTIC é instável, se e só se, uma ou ambascondições forem verdadeiras: (i) ao menos uma das raízescaracterísticas estão no semiplano direito; (ii) existem raízesrepetidas sobre o eixo imaginário.
• Um sistema LTIC é marginalmente estável, se e só se, nãoexistirem raízes características no semiplano direito e
existirem raízes não repetidas sobre o eixo imaginário.
Estabilidade de Sistemas (ix)R l ã E bilid d I E
Page 67
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 67/74
1-67Sinais e SistemasEng. da Computação
• Relação entre Estabilidade Interna e Externa
– Estabilidade interna (de entrada zero) é determinada para
condições iniciais não nulas e entrada nula, enquanto que aestabilidade externa (de estado zero) é determinada comcondições iniciais nulas e entrada diferente de zero.
– Estabilidade interna assegura estabilidade externa mas o inversonão é verdadeiro.
Parâmetros e Comportamento de Sistemas (i)• Comportamento Depende dos Modos Característicos
Page 68
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 68/74
1-68Sinais e SistemasEng. da Computação
p p
– O comportamento do sistema depende dos modos característicosem termos de módulo, tempo e precisão.
• Tempo de Resposta de um Sistema: A sua Constante de Tempo
– Uma entrada é respondida após algum tempo de sua aplicação.Tal intervalo de tempo é chamado constante de tempo do sistema.
– T h é o tempo pararesponder plenamente aum impulso.
– A rapidez de um sistema éindicada por sua constantede tempo: quanto maior fora constante de tempo, maislento é sua resposta
Parâmetros e Comportamento de Sistemas (ii)Tempo de Resposta de um Sistema: A sua Constante de Tempo
Page 69
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 69/74
1-69Sinais e SistemasEng. da Computação
• Tempo de Resposta de um Sistema: A sua Constante de Tempo
λ
λ
λ
λ
11
real. e negativo para ,)()( :modo só um com sistema um Para
)(
)()()(
assim, .)( devalormáximo o caso, no
adequado, tempode instante um em )(ˆ retangular pulso um de largura
pela definida é duração a anterior, exemplo No sistema.qualquer
para sinal um de efetiva duração de única definição uma uma existe Não
0
00
−==
=
=∴=
∫
∫ ∫ ∞
∞
∞−∞∞−
dt AeA
T
t uAet h
t h
dt t hT dt t ht hT
t h
t h
t h
t
hh
Parâmetros e Comportamento de Sistemas (iii)• Constante de Tempo e Tempo de Subida
Page 70
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 70/74
1-70Sinais e SistemasEng. da Computação
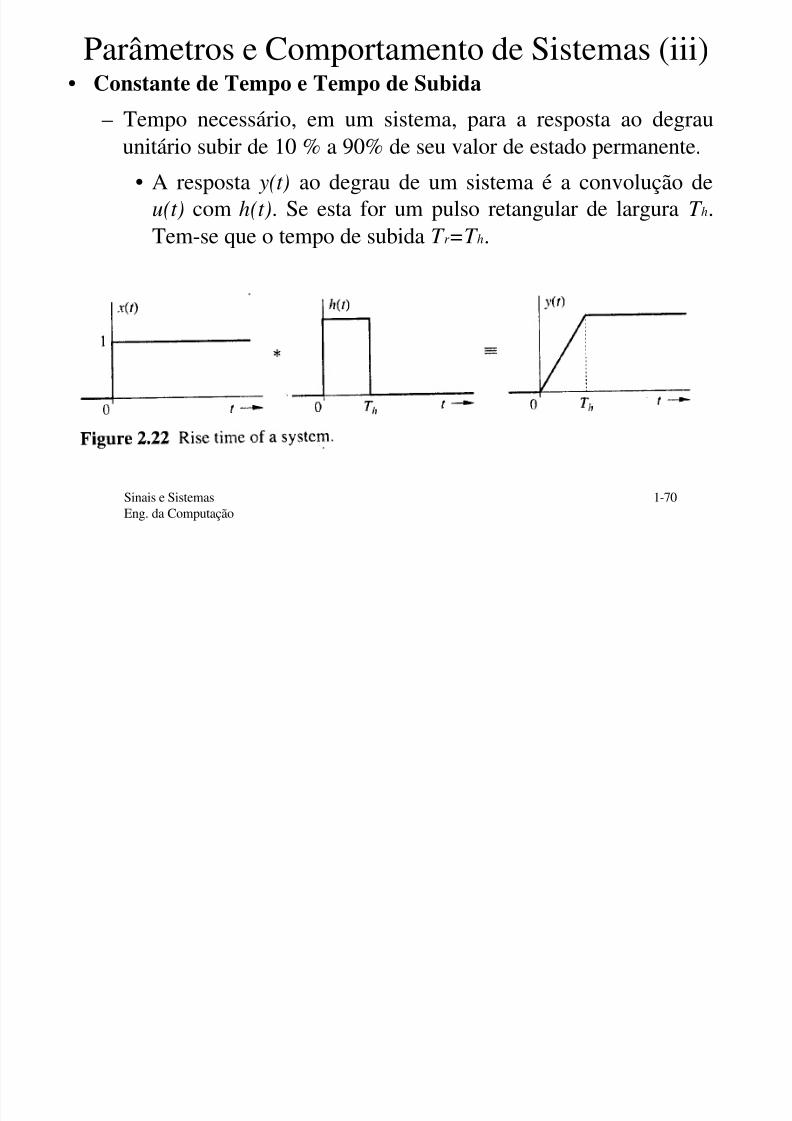
p p
– Tempo necessário, em um sistema, para a resposta ao degrauunitário subir de 10 % a 90% de seu valor de estado permanente.
• A resposta y(t) ao degrau de um sistema é a convolução deu(t) com h(t) . Se esta for um pulso retangular de largura T h.Tem-se que o tempo de subida T r =T h.
Parâmetros e Comportamento de Sistemas (iv)• Constante de Tempo e Filtragem
Page 71
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 71/74
1-71Sinais e SistemasEng. da Computação
– Um sistema com uma constante de tempo T h atua como um filtropassa-baixa com freqüência de corte f c=1/T h. Isto é, sinais deentrada com freqüência superior a f c Hertz são suprimidos. Vejaresultado das convoluções com alta e baixa freqüências.
Parâmetros e Comportamento de Sistemas (v)C t t d T Di ã d P l (E lh t )
Page 72
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 72/74
1-72Sinais e SistemasEng. da Computação
• Constante de Tempo e Dispersão do Pulso (Espalhamento)
– A transmissão de um pulso por um sistema causa dispersão ou
espalhamento de pulso. Isto é, o pulso de saída é mais largo que opulso de entrada. Esta característica é importante em sistemas decomunicações nos quais as informações são transmitidas poramplitudes de pulso. Deseja-se evitar que a dispersão causeinterferência ou superposição de sinais.
• Para uma entrada x(t ) com largura de pulso T x tem-se umasaída cuja saída y(t ) tem largura T y. Logo,
T y=T x+T h
• O tempo de espalhamento é igual à constante de tempo ou ao
tempo de subida do sistema.
Parâmetros e Comportamento de Sistemas (vi)• Constante de Tempo e Taxa de Transmissão de Informação
Page 73
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 73/74
1-73Sinais e SistemasEng. da Computação
• Constante de Tempo e Taxa de Transmissão de Informação
– Em sistema de comunicações por pulso, que transmitem
informação por amplitude de pulso, a taxa de transmissão deinformação é proporcional a taxa de transmissão de pulso. Paraevitar destruição da informação devido a dispersão dos pulsosdurante sua transmissão através do canal, a taxa de informaçãonão deve exceder a largura de banda do canal de comunicação.
• Como o pulso espalha-se por T h segundos, então dois pulsosconsecutivos devem distar T h segundos para evitarinterferência. Assim, a taxa de transmissão de pulsos não podeultrapassar 1/T h pulsos/segundo.
Exercícios RecomendadosP t MATLAB SCILAB
Page 74
8/7/2019 Ufpe Aula 03 Analise No Tempo Sistemas Continuos
http://slidepdf.com/reader/full/ufpe-aula-03-analise-no-tempo-sistemas-continuos 74/74
1-74Sinais e SistemasEng. da Computação
• Propostos para o MATLAB ou SCILAB– Todos
• Problemas– 2.2-1 até 2.2-7.
– 2.3-1 até 2.3-4.
– 2.4-4 até 2.4-10, 2.4-12, 2.4-14 até 2.4-18, 2.4-22 até 2.4-25,2.4-28 e 2.4-29, 2.4-31, 2.4-34.
– 2.5-1 até 2.5-4.
– 2.6-1 até 2.6-3, 2.6-5 e 2.6-6.
– 2.7-1 até 2.7-2.