Una introducci´ on al problema del subespacio invariante en espacios de Hilbert Rub´ en A. Mart´ ınez-Avenda˜ no Centro de Investigaci´on en Matem´ aticas Universidad Aut´onoma del Estado de Hidalgo Pachuca, Mexico email: [email protected]Escuela de An´ alisis Matem´ atico Universidad de Colima 26 al 30 de septiembre de 2016 Rub´ en A. Mart´ ınez-Avenda˜ no (UAEH) Problema del subspacio invariante Escuela An´ alisis Matem´ atico 1 / 87
Transcript
Una introduccion al problema del subespacio invarianteen espacios de Hilbert
Ruben A. Martınez-Avendano
Centro de Investigacion en MatematicasUniversidad Autonoma del Estado de Hidalgo
Cualquier polinomio es el lımite de vectores en este espacio. Por lo tanto,no puede haber subespacios cerrados invariantes, excepto todo V y 0.
(El argumento es una observacion de T. Crimmins.)Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 10 / 87
Ejemplo
¿Que pasa en espacios completos?
Sea L2[0, 1] el espacio de funciones (con valores reales o complejos)cuadrado integrables (con respecto a la medida de Lebesgue).
Para cada f ∈ L2[0, 1] definimos (Mx f )(x) = xf (x).
Sea E un conjunto medible en [0, 1] con medida positiva y menor que uno.Si definimos
ME := f ∈ L2[0, 1] : f = 0 casi en todo E,
entonces ME es un subespacio cerrado invariante no trivial para Mx .
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 11 / 87
Problema del subespacio invariante
¿Pasara lo mismo para cualquier operador en L2[0, 1]? El espacio L2[0, 1]es un ejemplo de un espacio de Hilbert.
Problema del subespacio invariante
Dado un operador T en un espacio de Hilbert, ¿existe un subespacioinvariante no trivial para T?
Para entrar a estudiar el problema con mas detalle, necesitamosdefiniciones.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 12 / 87
Definiciones basicas
Definicion
Sea V un espacio vectorial sobre C. Una funcion 〈·, ·〉 : V × V → C es unproducto interno sobre V si para todo u, v ,w ∈ V y λ, µ ∈ C se tiene
〈v , v〉 > 0 si v 6= 0,
〈λu + µv ,w〉 = λ〈u,w〉+ µ〈v ,w〉,〈u, v〉 = 〈v , u〉.
Dado un espacio vectorial con producto interno, definimos
‖v‖ :=√〈v , v〉.
Ejercicio: mostrar que esto es una norma.
Definicion
Decimos que H es un espacio de Hilbert si H es un espacio vectorial(sobre C) con un producto interno 〈·, ·〉, y es completo bajo la norma dadapor el producto interno.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 13 / 87
Ejemplos
Cn := (z1, z2, . . . , zn) : zi ∈ C con producto interno
〈z ,w〉 := z1w1 + z2w2 + · · ·+ znwn.
`2(N) := x = (x1, x2, x3, . . .) :∞∑j=1
|xj |2 <∞ con producto interno
〈z ,w〉 :=∞∑j=1
zjwj .
Ejercicio: ¿Por que es esta suma siempre finita?
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 14 / 87
Ejemplos
L2[0, 1] := f : [0, 1]→ C :
∫[0,1]|f |2 dm <∞, donde m es la
medida de Lebesgue en [0, 1] y producto interno
〈f , g〉 :=
∫[0,1]
f g dm.
Ejercicio: ¿Por que es esta integral siempre finita?
H2(D) := f : D→ C : f (z) =∞∑k=0
akzk y
∞∑k=0
|ak |2 <∞ y
producto interno
〈f , g〉 :=∞∑k=0
akbk ,
donde f (z) =∞∑k=0
akzk y g(z) =
∞∑k=0
bkzk .
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 15 / 87
Operadores acotados
Un operador en un espacio de Hilbert es una funcion lineal A : H → H.
Decimos que A es acotado si existe C > 0 tal que ‖Ax‖ ≤ C‖x‖ para todox ∈ H.
Teorema
Un operador en un espacio de Hilbert es acotado si y solo si es continuo.
Ejercicio: Demostrar la equivalencia.
La norma del operador A se define como
‖A‖ := sup‖Ax‖ : ‖x‖ ≤ 1.
Ejercicio: Demostrar que esto define una norma.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 16 / 87
Operadores acotados
Resulta ser que
sup‖Ax‖ : ‖x‖ ≤ 1 = sup‖Ax‖ : ‖x‖ = 1
= sup
‖Ax‖‖x‖
: ‖x‖ 6= 0
= ınfC > 0 : ‖Ax‖ ≤ C‖x‖
Ejercicio: demostrar las igualdades.
Tambien se cumple que si A y B son operadores acotados, entonces‖AB‖ ≤ ‖A‖ ‖B‖ (Ejercicio: demostrar.)
De aquı en adelante operador significa operador acotado.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 17 / 87
Ejemplos
En Cn todas las transformaciones lineales son continuas. (Ejercicio.)De hecho, cualquier operador A : Cn → Cn se puede representar poruna matriz n × n.
En `2 dos ejemplos de transformaciones lineales son S : `2 → `2 (eldesplazamiento hacia adelante) definido como
Ambas son continuas. De hecho,Ejercicio: ‖S‖ = 1 y ‖B‖ = 1. Mas aun, S es una isometrıa:‖Sx‖ = ‖x‖ para todo x ∈ `2.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 18 / 87
Ejemplos
En L2[0, 1], definimos el operador Mx como
(Mx f )(x) = x f (x).
Ejercicio: Mx es acotado y ‖Mx‖ = 1.
Sea φ ∈ H2(D). Si φ es acotada, el operador Mφ se define como
(Mφf )(z) = φ(z) f (z).
Se puede demostrar que Mφ es acotado y que
‖Mφ‖ = ‖φ‖∞ := sup|φ(z)| : z ∈ D.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 19 / 87
Ejemplos
El operador Mx en L2(0,∞) no esta acotado. (Ejercicio.) De hecho,ni siquiera esta definido en todo L2(0,∞). Su dominio natural es
f : (0,∞)→ C :
∫(0,∞)
x2|f (x)|2dm(x) <∞
,
el cual es un conjunto denso en L2(0,∞).
Si φ(z) = (z − 1)−1, el operador Mφ no esta acotado en H2(D).Su dominio es un conjunto denso en H2(D) y contiene a todos lospolinomios con raız en 1.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 20 / 87
Operadores compactos
Definicion
Un operador F : H → H es de rango finito si F es acotado y el subespacioranF := Fx : x ∈ H es de dimension finita.
Definicion
Un operador K : H → H es compacto si Kx : ‖x‖ ≤ 1 es un conjuntocompacto.
Nota: un operador T es acotado si Tx : ‖x‖ ≤ 1 es acotado. Por lotanto, compacto =⇒ acotado.
Observese tambien que si el operador identidad I : H → H es compacto,entonces I es de dimension finita.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 21 / 87
Operadores compactos
Proposicion
Sea K un operador en un espacio de Hilbert (de dimension infinita).Entonces K es compacto si y solo si existen operadores Kn, cada uno derango finito, tales que ‖Kn − K‖ → 0 si n→∞.
Proposicion
Sea K un operador compacto y sea A un operador. Entonces KA y AKson operadores compactos.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 22 / 87
Ejemplos
Cualquier operador T de rango finito es compacto. Esto es porqueTx : ‖x‖ ≤ 1 es un conjunto cerrado y acotado dentro de unespacio vectorial normado de dimension finita: ranT . Por lo tanto, elconjunto es compacto.
es compacto si αn → 0. (Ejercicio.) Este operador claramente no esde rango finito.
En L2[0, 1] definimos el operador de Volterra V como
(Vf )(x) =
∫[0,x]
f (y) dm(y).
El operador V es compacto y no es de rango finito
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 23 / 87
Espectro
Definicion
Sea T un operador acotado.
El espectro de T es
σ(T ) := λ ∈ C : T − λI no es invertible.
Si existe λ tal que Tx = λx para algun x 6= 0, decimos que λ es uneigenvalor y x un eigenvector. Denotamos por σp(T ) al conjunto deeigenvalores.
El espectro es no vacıo.
Claramente, si λ ∈ σp(T ) entonces λ ∈ σ(T ). No es cierto en general queσp(T ) = σ(T ).
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 24 / 87
Radio espectral
Definicion
Sea T un operador acotado. El radio espectral de T es el numero
sup|λ| : λ ∈ σ(T ).
La siguiente formula resulta ser muy util.
Proposicion (Formula del radio espectral)
Sea T un operador acotado. Entonces
r(T ) = lımn→∞
‖T n‖1/n.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 25 / 87
Ejemplos
Si T es de rango finito, entonces σ(T ) = σp(T ).
Si K es compacto, y H es de dimensaion infinita, se puede demostrar(Teorema de la Alternativa de Fredholm) que σ(K ) = 0 ∪ σp(K ) yes un conjunto a lo mas numerable y que unicamente se puedeacumular en 0.
Si B es el operador de desplazamiento hacia atras en `2, entoncesσp(B) = D, σ(B) = D. (Ejercicio.) Obviamente r(B) = 1.
Si S es el operador de desplazamiento hacia adelante en `2, entoncesσp(S) = ∅ y σ(S) = D. (Ejercicio.) Obviamente r(S) = 1.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 26 / 87
Ejemplos
Si Mx es el operador de multilplicacion por x en L2[0, 1], entoncesσp(Mx) = ∅ (Ejercicio.) y σ(Mx) = [0, 1]. Obviamente r(Mx) = 1.
Si V es el operador de Volterra en L2[0, 1], entonces σp(V ) = ∅(Ejercicio.) y σ(V ) = 0. Obviamente r(V ) = 0.
Sea αn una sucesion acotada. El operador T en `2 definido como
es decir, el espacio de todas aquellas sucesiones que son 0 en lasprimeras n + 1 coordenadas. Claramente, Mn es un subespacio de `2.
Sea x = ak ∈ Mn, entonces a tiene ceros en las primeras n + 1coordenadas. Entonces Sx tiene ceros en las primeras n + 2coordenadas: en particular Sx ∈Mn. Es decir, Mn es un subespacioinvariante para S .
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 30 / 87
Ejemplos
Sea Ω un subconjunto medible de [0, 1]. Definimos un subespacio deL2[0, 1] como
MΩ := f ∈ L2[0, 1] : f = 0 en Ω.
El subespacio MΩ es cerrado y claramente si f ∈MΩ entoncesMx f ∈MΩ. Por lo tanto MΩ es un subespacio invariante. Esteespacio es no trivial siempre que Ω no tenga medida cero o uno.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 31 / 87
Ejemplos
El operador de Volterra se definio como el operadorV : L2[0, 1]→ L2[0, 1] dado por
(Vf )(x) =
∫[0,x]
f (y) dm(y).
Recordemos que σp(V ) = ∅ y σ(V ) = 0. Los espacios invariantesde V son todos de la forma
Ma :=f ∈ L2[0, 1] : f = 0 en [0, a]
para a ∈ [0, 1].
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 32 / 87
Ejemplos
Sea φ ∈ H2(D). Las funciones en H2(D) tienen lımites radiales casien todas partes. Si φ ∈ H2(D) cumple que |φ(e ıt)| = 1 para casi todot ∈ [0, 2π], decimos que φ es una funcion interna.
Consideremos el operador Mz en H2(D).
Definamos M := φH2(D). Si f ∈ φH2(D), entonces f = φg paraalgun g ∈ H2(D). Pero entonces
(Mz f )(z) = zf (z) = zφ(z)g(z)
la cual esta en φH2(D). Por lo tanto M es un subespacio invariantepara Mz .
Se puede demostrar (pero no es facil) que si M es un subespacioinvariante distinto del espacio trivial 0, entonces existe una funcioninterna φ ∈ H2(D) tal que M = φH2(D).
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 33 / 87
Subespacios invariantes
Sea H un espacio de Hilbert y sea T un operador sobre H. Denotamos porLatT al conjunto de todos los subespacios invariantes de T .
Claramente H ∈ LatT y 0 ∈ LatT . A estos espacios invariantes lesllamamos triviales.
Este conjunto tiene la estructura de una retıcula (lattice, en ingles).
Se conoce la retıcula LatT para muchos ejemplos de operadores T . Porejemplo:
Si V es el operador de Volterra, entonces LatV ∼= [0, 1].
Si Mx es el operador de multiplicacion por x en L2[0, 1], entoncesLatMx
∼= [Ω] : Ω es medible en [0, 1], donde [Ω] denota la clase deequivalencia de conjuntos que son iguales salvo conjuntos de medidacero.
Si Mz es el operador de multiplicacion por z en H2(D), entonces
LatMz∼= φ ∈ H2(D) : φ es una funcion interna .
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 34 / 87
Subespacios invariantes
¿Por que nos interesan los espacios invariantes?
Si M∈ LatT , y M es no trivial, entonces podemos escribir al espacio deHilbert como una suma directa: H =M⊕M⊥. Entonces podemosescribir al operador T con una matriz 2× 2.
T =
M M⊥( )M A BM⊥ 0 C
Si A tuviera un subespacio invariante no trivial entonces A :M→M sepodrıa escribir de la misma forma. Lo mismo sucederıa conC :M⊥ →M⊥.De hecho, a menos que en algun momento el subespacio invariante o suespacio ortogonal sean de dimension 1, esto se puede seguir haciendo paraque la matriz sea cada vez mas diagonal.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 35 / 87
Subespacios invariantes para H = Cn
Si H = Cn es de dimension finita, entonces este proceso se puede seguirhaciendo hasta obtener una matriz de la forma
A =
a1 ∗ ∗ ∗ . . . ∗ ∗
0 a2 ∗ ∗ . . . ∗ ∗
0 0 a3 ∗ . . . ∗ ∗
0 0 0 a4 . . . ∗ ∗...
......
......
...
0 0 0 0 . . . an−1 ∗
0 0 0 0 . . . 0 an
.
Es decir, con respecto a cierta base, la matriz es triangular superior.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 36 / 87
Subespacios invariantes para H = Cn
Si A tiene alguna propiedad extra, por ejemplo, es autoadjunta (i.e.,A = A∗) entonces esto demuestra que la matriz A es diagonal (conrespecto a cierta base)
A =
a1 0 0 0 . . . 0
0 a2 0 0 . . . 0
0 0 a3 0 . . . 0
......
......
...
0 0 0 0 . . . an
.
A este resultado se le conoce como Teorema de los Ejes Principales (oTeorema Espectral). Es decir, la existencia de espacios invariantes nos daun teorema muy fuerte sobre la estrucutura de ciertas clases de operadores.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 37 / 87
¿Existen espacios invariantes?
Dado un espacio de Hilbert H y un operador T acotado en H, ¿existe unsubespacio invariante no trivial?
Si H es de dimension finita, la respuesta es sı, a menos que el espaciosea de dimension 1. (Consecuencia de la existencia de eigenvalores).
Si H no es separable, la respuesta es sı.Si x ∈ H y x 6= 0, se tiene que la cerradura de
spanT nx : n ∈ N0
es un subespacio invariante (ejercicio). Pero este espacio es separablepor lo que no puede ser igual a H.
El caso interesante es, entonces, que pasa si H es de dimensioninfinita y separable.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 38 / 87
Subespacios invariantes
¿Como se pueden encontrar subespacios invariantes no triviales?Si T tiene un eigenvalor λ con eigenvector x , entonces spanx es unsubespacio invariante no trivial. De hecho, a menos que T sea un multiplode la identidad, ker(T − λI ) es un espacio invariante no trivial para T .Mas es cierto.
Proposicion
Sean S y T operadores en H con ST = TS . Supongamos que T no es unmultiplo de la identidad I y que T tiene un eigenvalor λ. Entoncesker(T − λI ) es un subespacio invariante no trivial para S .
Demostracion.
Veamos que si x ∈ ker(T − λI ), entonces Sx ∈ ker(T − λI ):
(T − λI )Sx = S(T − λI )x = S0 = 0.
Es decir, ker(T − λI ) es un subespacio invariante no trivial para S .
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 39 / 87
Subespacios invariantes
Si T es compacto y tiene eigenvalores, entonces T tiene un subespacioinvariante.
Por lo visto anteriormente, si S conmuta con un operador compacto quetiene eigenvalores, entonces S tiene un subespacio invariante.
¿Que pasa si T es compacto y no tiene eigenvalores? ¿Debe T tenersubespacios invariantes no triviales?
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 40 / 87
Un poco de historia
En la decada de 1930, von Neumann demostro (pero nunca publico) queun operador compacto en el espacio de Hilbert siempre tiene subespaciosinvariantes no triviales.
Figura: J. von Neumann
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 41 / 87
N. Aronszajn, al inicio de la decada de 1950, encontro este resultadoindependientemente de von Neumann. Al consultarlo con von Neumann,tenıan esencialmente la misma demostracion (la cual utiliza proyeccionesortogonales).
En 1953, N. Aronszajn y K. T. Smith extendieron este resultado a espaciosde Banach.
Figura: N. Aronszajn y K. T. Smith
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 42 / 87
K. T. Smith pregunto (segun P. R. Halmos, 1963) si este resultado eracierto para operadores T tales que T 2 es compacto.
En 1966, A. R. Bernstein y A. Robinson demostraron que si un operador Ten un espacio de Hilbert es polinomialmente compacto (es decir existe unpolinomio p, no constante, tal que p(T ) es compacto) entonces tienesubespacios invariantes no triviales. (Su demostracion usaba tecnicas deanalisis no estandar.)
Figura: A. RobinsonRuben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 43 / 87
P. R. Halmos (1966), simplifico el argumento de Bernstein y Robinson alanalisis clasico.
A. R. Bernstein (1968) extendio el resultado a espacios de Banach (denuevo, usando analisis no estandar). P. Meyer-Nieberg (1968) demostro elresultado usando analisis clasico.
Figura: P.R. Halmos
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 44 / 87
El siguiente teorema tomo a la comunidad de teorıa de operadores porsorpresa.
Teorema (V. Lomonosov, 1973)
Sean A, T y K operadores en X tales que T no es un multiplo de laidentidad y K es un operador compacto no cero. Si A conmuta con T y Tconmuta con K , entonces A tiene un subespacio invariante no trivial.
Figura: V. Lomonosov
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 45 / 87
Este teorema usa de manera muy importante el teorema del punto fijo deSchauder (una extension del teorema de punto fijo de Brouwer a espaciosde dimension infinita).
Figura: J. Schauder y L.E.J. Brouwer
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 46 / 87
C. Pearcy y A. Shields (1974) se preguntaron si todos los operadores en unespacio de Banach satisfacen las hipotesis del teorema de Lomonosov.
Figura: C. Pearcy y A. Shields
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 47 / 87
D. W. Hadwin, E. A. Nordgren, H. Radjavi y P. Rosenthal (1980)encontraron un operador en un espacio de Hilbert que no satisface lascondiciones del teorema de Lomonosov.
Figura: D. W. Hadwin y E. A. Nordgren
Figura: H. Radjavi y P. Rosenthal
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 48 / 87
Operadores normales
El adjunto del operador T en H es el (unico) operador T ∗ que satisface
〈Tx , y〉 = 〈x ,T ∗y〉
para todo x , y ∈ H (de alguna manera, el adjunto es la “transpuestaconjugada” del operador T ).
Un operador N se dice normal si conmuta con su adjunta.
El teorema espectral (en una de sus versiones) establece que losoperadores normales son equivalentes a operadores de multiplicacion.
Como estos siempre tienen (muchos) subespacios invariantes no triviales,se sigue que todos los operadores normales tienen subespacios invariantesno triviales.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 49 / 87
Ejemplo no normal y sin eigenvalores
Recordemos que en el espacio H2(D), podemos definir el operador Mz .
Beurling (1941) describio todos los subespacios invariantes de Mz enH2(D). Esto da lugar a una rica teorıa de funciones en el disco unitario.Como ya vimos, M es invariante para Mz si y solo si existe una funcion φinterna tal que M = φH2(D).
Figura: A. Beurling
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 50 / 87
Operadores subnormales
El operador de desplazamiento es un caso especial de una clase deoperadores muy estudiada.
Definicion
Un operador T en un espacio de Hilbert H se llama subnormal si existe unespacio de Hilbert K y un operador normal N en K tales que
El espacio H ⊆ K es un subespacio invariante para N.
entonces W restringido a `2, pensado como subespacio de `2(Z), es eloperador S . Ademas W es normal (de hecho unitario).
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 51 / 87
Teorema de Brown
Teorema (S. W. Brown, 1978)
Si T es un operador subnormal en un espacio de Hilbert, entonces T tieneun subespacio invariante no trivial.
Las tecnicas de Brown llevaron a muchos otros resultados. Por ejemplo,
Teorema (S. W. Brown, B. Chevreau, C. Pearcy, 1988)
Sea T un operador en un espacio de Hilbert. Si T tiene norma menor oigual que uno y su espectro contiene al cırculo unitario, entonces T tieneun subespacio invariante no trivial.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 52 / 87
Contraejemplos
En 1975, P. Enflo anuncio la existencia de un espacio de Banach dondeexiste un operador sin espacios invariantes no triviales. El artıculo quecontiene la demostracion completa aparecio en 1987.
Figura: P. Enflo
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 53 / 87
C. J. Read, encontro otros ejemplos, y el primero fue publicado en 1984.
Todos estos espacios son “no reflexivos”.
El ejemplo “mas sencillo” fue descubierto por Read: un operador en `1 sinsubespacios invariantes no triviales.
En 1984, Read encontro un operador en `1 sin subconjuntos invariantesno triviales.
Figura: C. J. Read
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 54 / 87
Problema del subespacio invariante
Tambien se sabe que existe un operador (que no se sabe si es acotado ono) en un espacio de Hilbert sin subespacios invariantes no triviales. Elproblema es que este operador se construye por induccion transfinita y nose sabe realmente nada sobre el (ni siquiera si es acotado). Este ejemplofue encontrado por Allen Shields.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 55 / 87
Ejercicios
Sean A y B operadores similares (i.e., AR = RB con R invertible). SiB tiene un subespacio invariante no trivial, entonces A tiene unsubespacio invariante no trivial.
Sean A y B operadores quasi-similares (i.e., AS = SB y TA = BTcon S y T operadores inyectivos y de rango denso). Si B tiene unsubespacio invariante no trivial, entonces A tiene un subespacioinvariante no trivial.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 56 / 87
Propiedades basicas de espacios invariantes
Proposicion
Sea T un operador en H. Entonces M∈ LatT si y solo si M⊥ ∈ LatT ∗.
Demostracion.
Supongamos que M∈ LatT . Sea x ∈M⊥. Debemos demostrar queT ∗x ∈M⊥. Pero, si y ∈M, tenemos
〈T ∗x , y〉 = 〈x ,Ty〉 = 0,
pues Ty ∈M. Por lo tanto, T ∗x ∈M⊥.
La otra direccion es analoga (ejercicio).
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 57 / 87
Propiedades basicas de espacios invariantes
Proposicion
Sea T un operador en H. Sea M un subespacio y sea P la proyeccionortogonal sobre M. Entonces, M∈ LatT si y solo si PTP = TP.
Demostracion.
Supongamos que M∈ LatT . Sea x ∈ H. Entonces Px ∈M y por lotanto TPx ∈M. Pero esto implica que PTPx = TPx . Como x fuearbitrario, se tiene que PTP = TP.
Supongamos ahora que PTP = TP. Sea y ∈M. EntoncesPTPy = TPy , pero como y ∈M se sigue que Py = y . Por lo tanto,PTy = Ty lo cual quiere decir que Ty ∈M. Es decir,M∈ LatT .
Ejercicio: Un operador T tiene un subespacio invariante no trivial si y solosi la ecuacion XTX = TX tiene una solucion distinta de X = 0 y X = I .
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 58 / 87
Propiedades basicas de espacios invariantes
Proposicion
Sea T un operador en H. Sea M un subespacio y sea P la proyeccionortogonal sobre M. Entonces, M∈ LatT y M⊥ ∈ LatT si y solo siTP = PT .
Demostracion.
Notemos primero que si P es la proyeccion ortogonal sobre M, entoncesI − P es la proyeccion ortogonal sobre M⊥.
Si M⊥ ∈ LatT entonces (I − P)T (I − P) = T (I − P). Esto implicaque T − PT − TP + PTP = T − TP. Simplificando y usando elhecho que M∈ LatT y por lo tanto PTP = TP tenemos TP = PT .
Si TP = PT , multiplicando a la derecha por P obtenemosTP = PTP, por lo que M∈ LatT . Si TP = PT , obtenemosT (I − P) = (I − P)T . Multiplicando por I − P del lado izquierdo nosda T (I − P) = (I − P)T (I − P), por lo que M⊥ ∈ LatT .
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 59 / 87
Espacios reductores
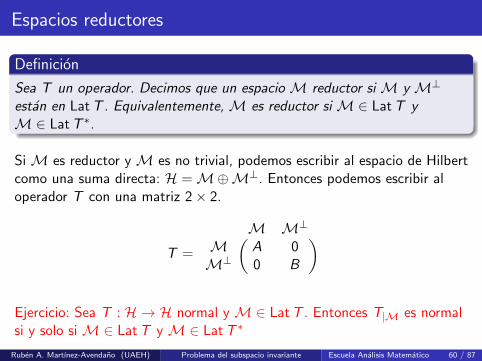
Definicion
Sea T un operador. Decimos que un espacio M reductor si M y M⊥estan en LatT . Equivalentemente, M es reductor si M∈ LatT yM∈ LatT ∗.
Si M es reductor y M es no trivial, podemos escribir al espacio de Hilbertcomo una suma directa: H =M⊕M⊥. Entonces podemos escribir aloperador T con una matriz 2× 2.
T =
M M⊥( )M A 0M⊥ 0 B
Ejercicio: Sea T : H → H normal y M∈ LatT . Entonces T|M es normalsi y solo si M∈ LatT y M∈ LatT ∗
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 60 / 87
Espacios reductores
Dado un operador T , ¿existen espacios reductores no triviales?
Ejemplo
Sea S en `2 el operador de desplazamiento hacia adelante. Entonces S notiene espacios reductores no triviales.
Demostracion.
Primero, observese que S∗ = B. (Ejercicio: demostrar.) Supongamos queM 6= 0. Sea x ∈M, x 6= 0. Como x 6= 0, alguna de sus coordenadas,digamos la k-esima, xk , es diferente de cero. Como M es reductor, secumple que Bkx = (xk , xk+1, xk+2, . . . ) ∈M. Como M es un subespacio,se tiene que 1
xkBkx ∈M.
Podemos, entonces, suponer que existe y = (1, y1, y2, y3, . . . ) ∈M. Sesigue que SBy = (0, y1, y2, y3, . . . ) ∈M. Como M es subespacio entoncesy − SBy ∈M. Es decir, e0 := (1, 0, 0, 0, . . . ) ∈M. Si n ∈ N0, tenemosen := Sne0 = (0, 0, . . . , 0, 1, 0, . . . ) ∈M. Pero esto da M = `2.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 61 / 87
Transitividad
Definicion
Sea A un conjunto de operadores acotados en H. Decimos que A estransitivo si, para todo x ∈ H, x 6= 0,
Ax : A ∈ A
es denso en H.
Una proposicion que sera util despues.
Proposicion
Sea A un algebra. Entonces, A es transitiva si y solo si no existe unsubespacio invariante no trivial comun para todo A ∈ A. Es decir, si y solosi ⋂
A∈ALatA = ∅,H.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 62 / 87
Demostracion.
Supongamos que M 6= 0 y M∈ LatA para todo A ∈ A. Seax ∈M, x 6= 0. Entonces Ax ∈M para todo A ∈ A. Esto implica que
Ax : A ∈ A ⊆M.
Como A es transitiva, esto implica que el conjunto de la izquierda esdenso y por lo tanto M = H.
Supongamos ahora que no existe un subespacio invariante no trivialcomun para todo A ∈ A. Sea x 6= 0. El conjunto Ax : A ∈ A es unsubespacio lineal (no necesariamente cerrado), pues A es unsubespacio. Ademas, este conjunto es invariante para cada A ∈ A(pues A es un algebra). Por lo tanto.
Ax : A ∈ A
es un subespacio cerrado y esta en LatA para cada A ∈ A. Elconjunto no es cero, pues I ∈ A. Por lo tanto, la hipotesis nos diceque Ax : A ∈ A = H, lo cual demuestra que A es transitivo.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 63 / 87
Teorema (Lomonosov debil)
Sea T un operador y K un operador compacto, K 6= 0. Si KT = TKentonces T tiene un subespacio invariante no trivial.
Demostracion: (por H. M. Hilden)
Sin perdida de generalidad, podemos suponer que ‖K‖ = 1. (¿Por que?)Si K tiene un eigenvalor λ entonces, como ya vimos antes ker(K − λI ) esun subespacio invariante (no trivial) para T : si x ∈ ker(K − λI ) entonces
(K − λI )Tx = T (K − λI )x = T0 = 0,
por lo que Tx ∈ ker(K − λI ). Por lo tanto, podemos suponer que eloperador compacto no tiene eigenvalores. Es decir, r(K ) = 0. Por laformula del radio espectral, tenemos.
lımn→∞
‖Kn‖1/n = 0.
Esto implica que lımn→∞
‖Kn‖ = 0. (Ejercicio.)
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 64 / 87
Demostracion: (continuacion)
Sea A := T : TK = KT. Demostraremos que existe un subespacioinvariante no trivial comun para cada T ∈ A. Es decir, demostraremos queA no es transitivo.
Por contradiccion supongamos que A es transitivo. Por lo tanto, para todox ∈ H, x 6= 0 tenemos
Tx : T ∈ A
es denso.
Escojamos x0 ∈ H tal que ‖Kx0‖ > 1. Necesariamente, ‖x0‖ > 1 (¿Porque?)
Definimos S como
S := x ∈ H : ‖x − x0‖ < 1.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 65 / 87
Demostracion: (continuacion)
Afirmaciones:
1 0 6∈ K (S).
Por contradiccion, supongamos que 0 ∈ K (S). Entonces existe unasucesion yn, con yn ∈ S tales que Kyn → 0. Pero
Como ‖Kyn‖ → 0, tenemos que ‖Kx0‖ ≤ 1. Pero esto contradice laseleccion de x0.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 66 / 87
Demostracion: (continuacion)
2 Como S es acotado y K es compacto, se sigue que K (S) escompacto.
3 Para cada T ∈ A, el conjunto T−1(S) = x ∈ H : ‖Tx − x0‖ < 1es abierto, pues T es continuo. Ademas 0 6∈ T−1(S), pues 0 6∈ S.
4
⋃T∈A
T−1(S) = H \ 0. Esto es porque
⊆) Trivial, por la observacion de arriba.
⊇) Sea x ∈ H \ 0. Como x 6= 0, por transitividad de A, tenemos queTx : T ∈ A es denso. Como es denso, intersecta a cualquier abierto(no vacıo), en particular Tx : T ∈ A ∩ S 6= ∅. Es decir, existeT ∈ A tal que Tx ∈ S. Equivalentemente, x ∈ T−1(S).
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 67 / 87
Demostracion: (continuacion)
5 Como K (S) es compacto y⋃T∈A
T−1(S) es una cubierta abierta, por
compacidad, existe una subcubierta finita. Es decir, existenoperadores A1,A2, . . . ,An tales que
K (S) ⊆ A−11 (S) ∪ A−1
2 (S) ∪ A−13 (S) ∪ · · · ∪ A−1
n (S)
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 68 / 87
Demostracion: (continuacion)
6 Como x0 ∈ S, se sigue que Kx0 ∈ K (S). Por el punto anterior, existei1 ∈ 1, 2, 3, . . . , n tal que Kx0 ∈ A−1
i1(S). Es decir, Ai1Kx0 ∈ S.
Analogamente, como Ai1Kx0 ∈ S, se sigue que KAi1Kx0 ∈ K (S). Porel punto anterior, existe i2 ∈ 1, 2, 3, . . . , n tal queKAi1Kx0 ∈ A−1
i2(S). Es decir, Ai2KAi1Kx0 ∈ S.
Analogamente, despues de m pasos, hemos encontrado ındicesi1, i2, . . . , im tales que
AimKAim−1K . . .KAi2KAi1Kx0 ∈ S
Pero esto es equivalente a
AimAim−1 . . .Ai2Ai1Kmx0 ∈ S
(¿Por que?)
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 69 / 87
Demostracion: (continuacion)
7 Sea c := max‖A1‖, ‖A2‖, ‖A3‖, . . . , ‖An‖. Entonces
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 70 / 87
Demostracion: (continuacion)
8 Pero recuerdese que
AimAim−1 . . .Ai2Ai1Kmx0 ∈ S
Como‖AimAim−1 . . .Ai2Ai1K
mx0‖ → 0
esto implica que 0 ∈ S. Esto es una contradiccion.
Por lo tanto, A no es transitivo. Por lo tanto, hay un subespacioinvariante no trivial comun para los elementos de A. En particular, eloperador original T tiene un subespacio invariante no trivial.
Ruben A. Martınez-Avendano (UAEH) Problema del subspacio invariante Escuela Analisis Matematico 71 / 87


































































![La Entrevista en La Investigaci n Cualitativa Nuevas Tendencias y Retos[1]](https://static.documents.pub/doc/80x56/55cf9dd7550346d033af7785/la-entrevista-en-la-investigaci-n-cualitativa-nuevas-tendencias-y-retos1.jpg)










