Behavioral algorithms (behavior=task), bioinspired, artificialpotentials, neuro-fuzzy, cognitive approaches, etc.
btw. . . mood ?
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Geometrical meaning of the null-space
σ = Jζ with m = 1 and n = 2 is a line! (left)
Range of the pseudoinverse and the null spaces are orthogonal (right)
Gianluca Antonelli BiogradNaMoru, 8 October 2015
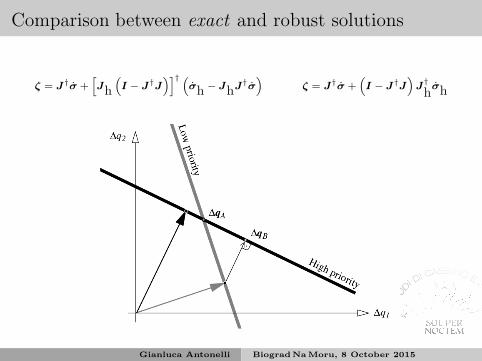
Comparison between exact and robust solutions
ζ = J†σ +
[
Jh
(
I − J†J)]† (
σh − JhJ†σ
)
ζ = J†σ +
(
I − J†J)
J†
hσh
Gianluca Antonelli BiogradNaMoru, 8 October 2015
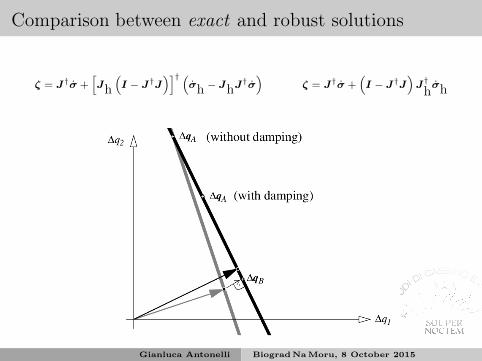
Comparison between exact and robust solutions
ζ = J†σ +
[
Jh
(
I − J†J)]† (
σh − JhJ†σ
)
ζ = J†σ +
(
I − J†J)
J†
hσh
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Comparison between exact and robust solutions
ζ = J†σ +
[
Jh
(
I − J†J)]† (
σh − JhJ†σ
)
ζ = J†σ +
(
I − J†J)
J†
hσh
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Some issues
Kinematic singularities
Damped least squareSingular-value-decomposition-based filteringOther kind of filtering
Algorithmic singularities
Two different-priority tasks are achievable alone but not together:
ranks of both J and Jh is full but not of
[J
Jh
](still the
inversion of a singular matrix)
Set-based/inequality control 6
Task transition vs continuity/priority
6[Escande et al.(2013)Escande, Mansard, and Wieber,Simetti et al.(2013)Simetti, Casalino, Torelli, Sperinde, and Turetta,Antonelli et al.(2015)Antonelli, Moe, and Pettersen]
Gianluca Antonelli BiogradNaMoru, 8 October 2015
But. . .
What are these tasks we are talking about ?
Gianluca Antonelli BiogradNaMoru, 8 October 2015
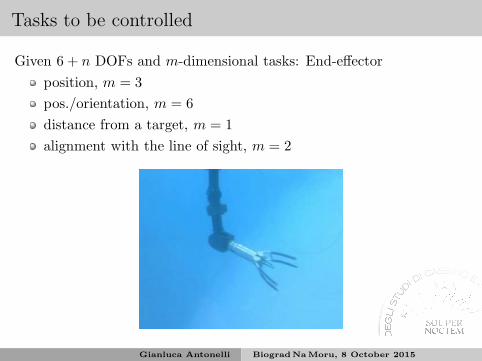
Tasks to be controlled
Given 6 + n DOFs and m-dimensional tasks: End-effector
position, m = 3
pos./orientation, m = 6
distance from a target, m = 1
alignment with the line of sight, m = 2
Gianluca Antonelli BiogradNaMoru, 8 October 2015
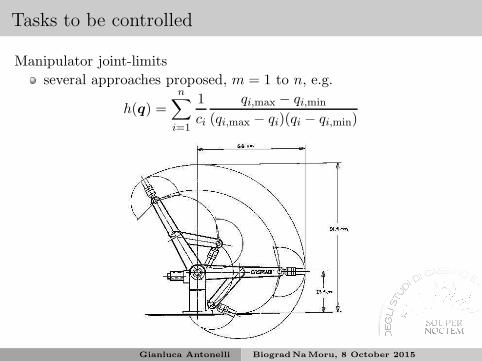
Tasks to be controlled
Manipulator joint-limits
several approaches proposed, m = 1 to n, e.g.
h(q) =n∑
i=1
1
ci
qi,max − qi,min
(qi,max − qi)(qi − qi,min)
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Tasks to be controlled
Drag minimization, m = 1 7
h(q) = DT(q, ζ)WD(q, ζ)
within a second order solution
ζ = J †(σ − Jζ
)− k
(I − J†J
)([ ∂h∂η∂h∂q
]+
∂h
∂ζ
)
7[Sarkar and Podder(2001)]Gianluca Antonelli BiogradNaMoru, 8 October 2015
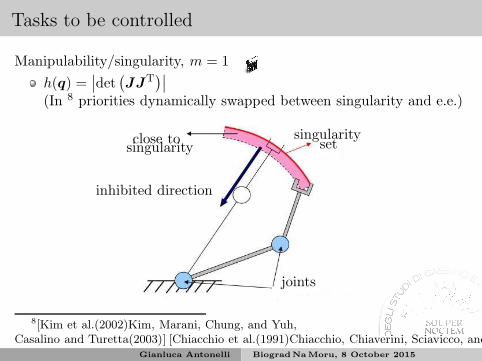
Tasks to be controlled
Manipulability/singularity, m = 1
h(q) =∣∣det
(JJT
)∣∣(In 8 priorities dynamically swapped between singularity and e.e.)
joints
inhibited direction
singularitysingularity
setclose to
8[Kim et al.(2002)Kim, Marani, Chung, and Yuh,Casalino and Turetta(2003)] [Chiacchio et al.(1991)Chiacchio, Chiaverini, Sciavicco, and
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Tasks to be controlled
Restoring moments:
m = 3 keep close gravity-buoyancy of the overall system 9
m = 2 align gravity and buoyancy (SAUVIM is 4 tons) 10
f b
f g
τ 2
9[Han and Chung(2008)]10[Marani et al.(2010)Marani, Choi, and Yuh]
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Tasks to be controlled
Obstacle avoidance m = 1
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Tasks to be controlled
Workspace-related variablesVehicle distance from the bottom, m = 1Vehicle distance from the target, m = 1
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Tasks to be controlled
Sensors configuration variables
Vehicle roll and pitch, m = 2Misalignment between the camera optical axis and the target lineof sight, m = 2
Gianluca Antonelli BiogradNaMoru, 8 October 2015
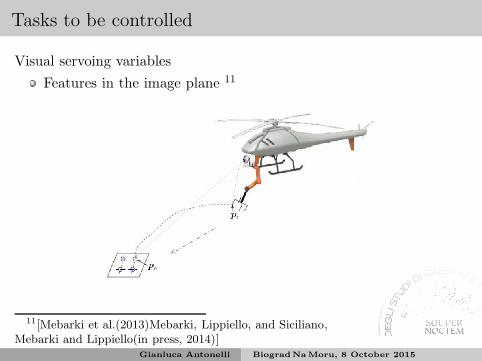
Tasks to be controlled
Visual servoing variables
Features in the image plane 11
11[Mebarki et al.(2013)Mebarki, Lippiello, and Siciliano,Mebarki and Lippiello(in press, 2014)]
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Outline
Motivation
Inverse Kinematics
A possible kinematic solution: NSB behavioral control
Simulation/experiments
Gianluca Antonelli BiogradNaMoru, 8 October 2015
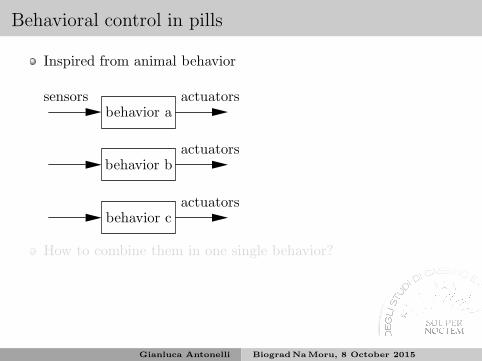
Behavioral control in pills
Inspired from animal behavior
sensorsbehavior a
actuators
behavior bactuators
behavior cactuators
How to combine them in one single behavior?
Gianluca Antonelli BiogradNaMoru, 8 October 2015
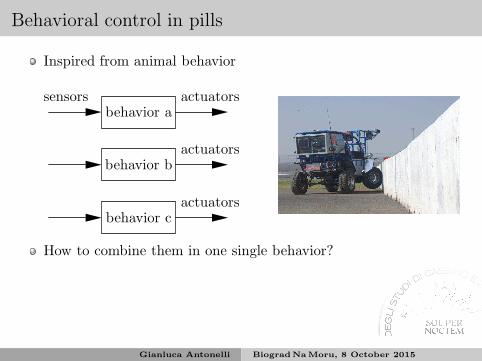
Behavioral control in pills
Inspired from animal behavior
sensorsbehavior a
actuators
behavior bactuators
behavior cactuators
How to combine them in one single behavior?
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Competitive behavioral control
Behaviors are in competitions and the higher priority can subsume thelower ones12
sensorsbehavior b
ζ2
behavior a
ζ1
behavior c
ζ3 ζd
12[Brooks(1986)]Gianluca Antonelli BiogradNaMoru, 8 October 2015
Cooperative behavioral control
Behaviors cooperate and the priority is embedded in the gains13
sensorsbehavior b
ζ2 ⊗
α2
behavior a
ζ1
supervisor
⊗
α1
behavior c
ζ3 ⊗
α3
∑ ζd
13[Arkin(1989)]Gianluca Antonelli BiogradNaMoru, 8 October 2015
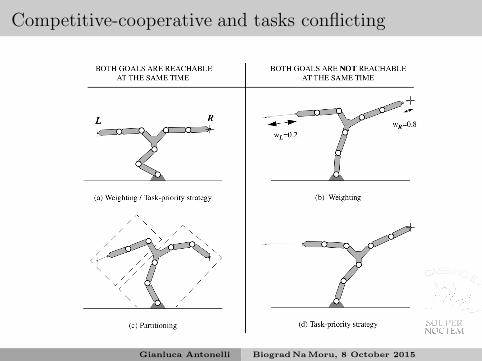
Competitive-cooperative and tasks conflicting
Cooperative always owns an error, can we inherit the benefit ofGianluca Antonelli BiogradNaMoru, 8 October 2015
NSB
Null Space-based Behavioral control
Each action is decomposed in elementary behaviors/tasks
motion reference command for each task
ζd = J †(σd +Λσ
)σ = σd−σ
Gianluca Antonelli BiogradNaMoru, 8 October 2015
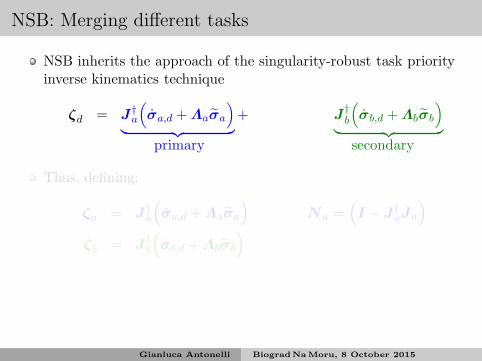
NSB: Merging different tasks
NSB inherits the approach of the singularity-robust task priorityinverse kinematics technique
ζd = J †a
(σa,d +Λaσa
)
︸ ︷︷ ︸+ J
†b
(σb,d +Λbσb
)
︸ ︷︷ ︸primary secondary
Thus, defining:
ζa = J †a
(σa,d +Λaσa
)Na =
(I − J†
aJa
)
ζb = J†b
(σb,d +Λbσb
)
Gianluca Antonelli BiogradNaMoru, 8 October 2015
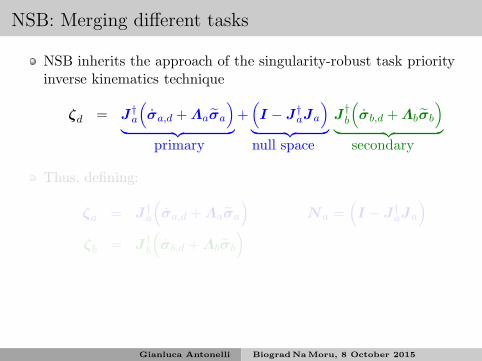
NSB: Merging different tasks
NSB inherits the approach of the singularity-robust task priorityinverse kinematics technique
ζd = J †a
(σa,d +Λaσa
)
︸ ︷︷ ︸+(I − J†
aJa
)
︸ ︷︷ ︸J†b
(σb,d +Λbσb
)
︸ ︷︷ ︸primary null space secondary
Thus, defining:
ζa = J †a
(σa,d +Λaσa
)Na =
(I − J†
aJa
)
ζb = J†b
(σb,d +Λbσb
)
Gianluca Antonelli BiogradNaMoru, 8 October 2015
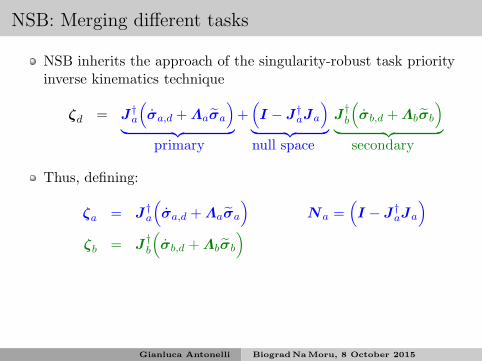
NSB: Merging different tasks
NSB inherits the approach of the singularity-robust task priorityinverse kinematics technique
ζd = J †a
(σa,d +Λaσa
)
︸ ︷︷ ︸+(I − J†
aJa
)
︸ ︷︷ ︸J†b
(σb,d +Λbσb
)
︸ ︷︷ ︸primary null space secondary
Thus, defining:
ζa = J †a
(σa,d +Λaσa
)Na =
(I − J†
aJa
)
ζb = J†b
(σb,d +Λbσb
)
Gianluca Antonelli BiogradNaMoru, 8 October 2015
NSB: Merging different tasks
NSB inherits the approach of the singularity-robust task priorityinverse kinematics technique
ζd = J †a
(σa,d +Λaσa
)
︸ ︷︷ ︸+(I − J†
aJa
)
︸ ︷︷ ︸J†b
(σb,d +Λbσb
)
︸ ︷︷ ︸primary null space secondary
Thus, defining:
ζa = J †a
(σa,d +Λaσa
)Na =
(I − J†
aJa
)
ζb = J†b
(σb,d +Λbσb
)
ζd = ζa +Naζb
Gianluca Antonelli BiogradNaMoru, 8 October 2015
NSB: Three-task example
ζa = J †a
(σa,d +Λaσ1
)
ζb = J†b
(σb,d +Λbσ2
)
ζc = J †c
(σc,d +Λcσ3
)
Successive projection approach
Na =(I − J †
aJa
)
N b =(I − J
†bJ b
)
ζd = ζa +Naζb +NaN bζc
Augmented projection approach
Jab =
[Ja
J b
]
Nab =(In − J
†abJab
)
ζd = ζa +Naζb+Nabζc
Gianluca Antonelli BiogradNaMoru, 8 October 2015
NSB: Three-task example
ζa = J †a
(σa,d +Λaσ1
)
ζb = J†b
(σb,d +Λbσ2
)
ζc = J †c
(σc,d +Λcσ3
)
Successive projection approach
Na =(I − J †
aJa
)
N b =(I − J
†bJ b
)
ζd = ζa +Naζb +NaN bζc
Augmented projection approach
Jab =
[Ja
J b
]
Nab =(In − J
†abJab
)
ζd = ζa +Naζb+Nabζc
Gianluca Antonelli BiogradNaMoru, 8 October 2015
NSB: Three-task example
ζa = J †a
(σa,d +Λaσ1
)
ζb = J†b
(σb,d +Λbσ2
)
ζc = J †c
(σc,d +Λcσ3
)
Successive projection approach
Na =(I − J †
aJa
)
N b =(I − J
†bJ b
)
ζd = ζa +Naζb +NaN bζc
Augmented projection approach
Jab =
[Ja
J b
]
Nab =(In − J
†abJab
)
ζd = ζa +Naζb+Nabζc
Gianluca Antonelli BiogradNaMoru, 8 October 2015
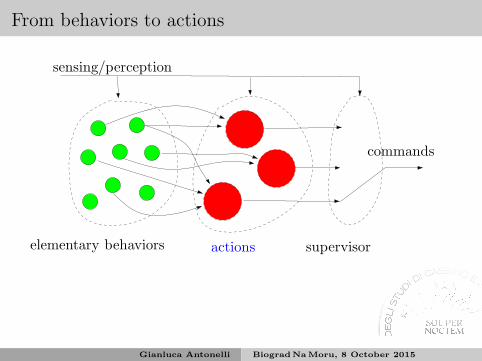
From behaviors to actions
sensing/perception
elementary behaviors actions
commands
supervisor
Gianluca Antonelli BiogradNaMoru, 8 October 2015
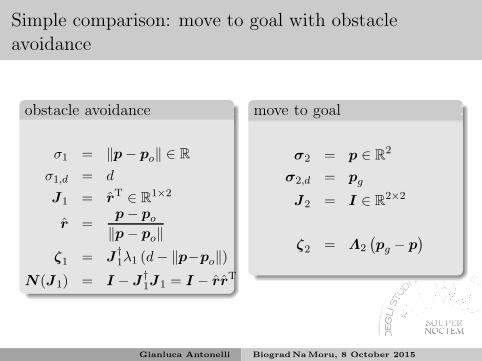
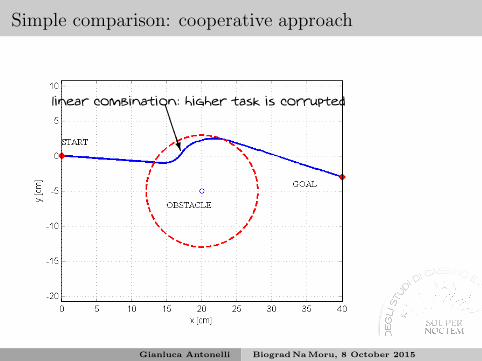
Simple comparison: move to goal with obstacle
avoidance
obstacle avoidance
σ1 = ‖p− po‖ ∈ R
σ1,d = d
J1 = rT ∈ R1×2
r =p− po
‖p− po‖
ζ1 = J†1λ1 (d− ‖p−po‖)
N (J1) = I − J†1J1 = I − rrT
move to goal
σ2 = p ∈ R2
σ2,d = pg
J2 = I ∈ R2×2
ζ2 = Λ2
(pg − p
)
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Simple comparison: competitive approach
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Simple comparison: competitive approach
❆❆❆❆❆❯
only movetogoal
Gianluca Antonelli BiogradNaMoru, 8 October 2015
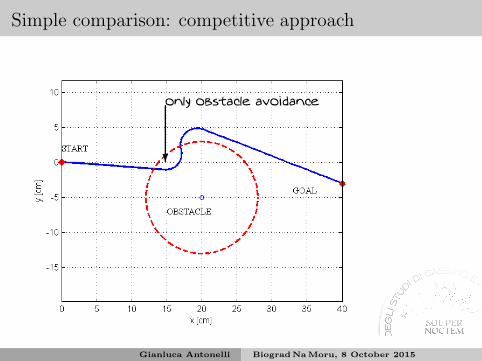
Simple comparison: competitive approach
❄
only obstacle avoidance
Gianluca Antonelli BiogradNaMoru, 8 October 2015
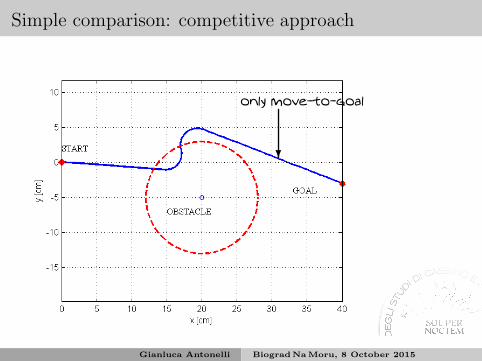
Simple comparison: competitive approach
❄
only movetogoal
Gianluca Antonelli BiogradNaMoru, 8 October 2015
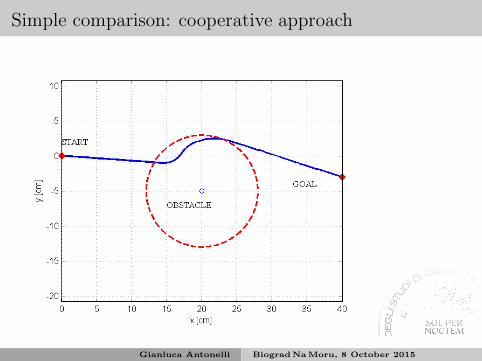
Simple comparison: cooperative approach
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Simple comparison: cooperative approach
❆❆❆❆❯
only movetogoal
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Simple comparison: cooperative approach
❇❇❇❇◆
linear combination: higher task is corrupted
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Simple comparison: cooperative approach
❄
only movetogoal
Gianluca Antonelli BiogradNaMoru, 8 October 2015
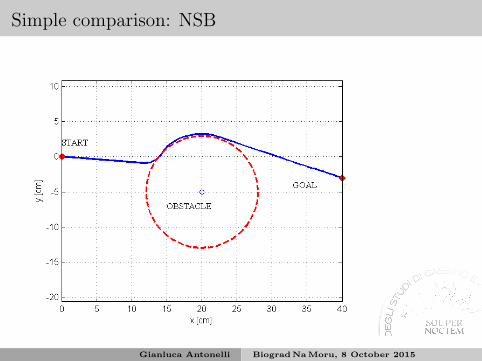
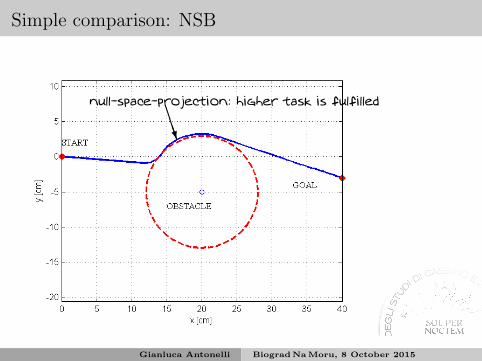
Simple comparison: NSB
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Simple comparison: NSB
❆❆❆❆❯
only movetogoal
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Simple comparison: NSB
❇❇❇◆
nullspaceprojection: higher task is fulfilled
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Simple comparison: NSB
❄
only movetogoal
Gianluca Antonelli BiogradNaMoru, 8 October 2015
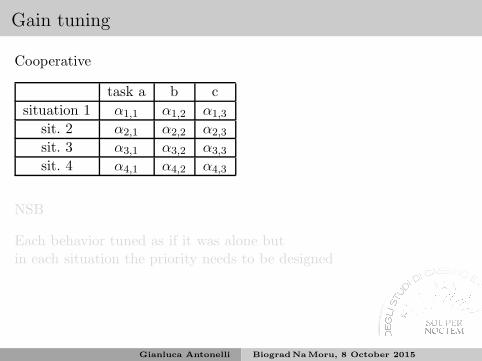
Gain tuning
Cooperative
task a b c
situation 1 α1,1 α1,2 α1,3
sit. 2 α2,1 α2,2 α2,3
sit. 3 α3,1 α3,2 α3,3
sit. 4 α4,1 α4,2 α4,3
NSB
Each behavior tuned as if it was alone butin each situation the priority needs to be designed
Gianluca Antonelli BiogradNaMoru, 8 October 2015
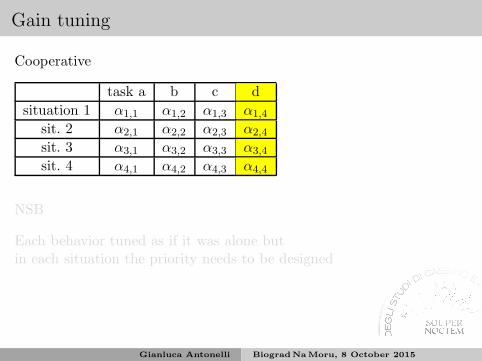
Gain tuning
Cooperative
task a b c d
situation 1 α1,1 α1,2 α1,3 α1,4
sit. 2 α2,1 α2,2 α2,3 α2,4
sit. 3 α3,1 α3,2 α3,3 α3,4
sit. 4 α4,1 α4,2 α4,3 α4,4
NSB
Each behavior tuned as if it was alone butin each situation the priority needs to be designed
Gianluca Antonelli BiogradNaMoru, 8 October 2015
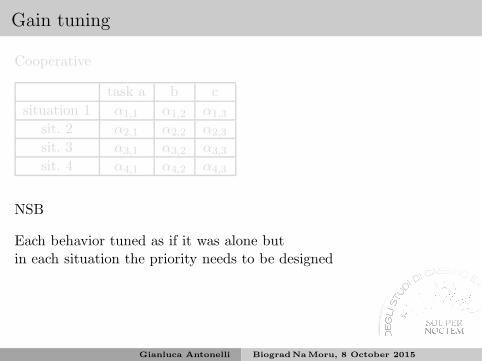
Gain tuning
Cooperative
task a b c
situation 1 α1,1 α1,2 α1,3
sit. 2 α2,1 α2,2 α2,3
sit. 3 α3,1 α3,2 α3,3
sit. 4 α4,1 α4,2 α4,3
NSB
Each behavior tuned as if it was alone butin each situation the priority needs to be designed
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Stability analysis
Lyapunov function14
V (σ) = 1
2σTσ > 0 where σ =
[σT
a σT
b σT
c
]T
V = −σT
Ja
Jb
Jc
v = −σTMσ = −σ
T
Λa Oma,mbOma,mc
JbJ†aΛa JbNaJ
†bΛb JbNJ
†cΛc
JcJ†aΛa JcNaJ
†bΛb JcNJ
†cΛc
σ
V < 0 depending on the mutual relationships among the Jacobians
14[Antonelli(2009)]Gianluca Antonelli BiogradNaMoru, 8 October 2015
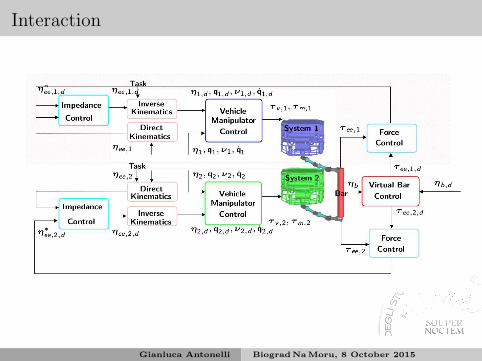
Interaction
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Outline
Motivation
Inverse Kinematics
A possible kinematic solution: NSB behavioral control
Simulation/experiments
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Numerical simulation on MARIS model:
underwater 6-DOF vehicle + 7-DOF manipulator
Reach a pre-grasp configuration in terms of end-effector position andorientation
priority-1 task: e.e. configuration (m = 6)
priority-2 task: vehicle roll+pitch (m = 2)
priority-3 task: position of joint 2 (m = 1)
only e.e. ⇒
complete solution ⇒
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Numerical simulation on MARIS model:
underwater 6-DOF vehicle + 7-DOF manipulator
Cameraman action: keep the object in the field of view
priority-1 task: field of view (m = 2)
priority-2 task: vehicle roll+pitch (m = 2)
priority-3 task: arm manipulability (m = 1)
priority-4 task: mechanical joint limits (m = 7)
animation ⇒
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Simulations and experiments within TRIDENT
[Simetti et al.(2013)Simetti, Casalino, Torelli, Sperinde, and Turetta]
Gianluca Antonelli BiogradNaMoru, 8 October 2015
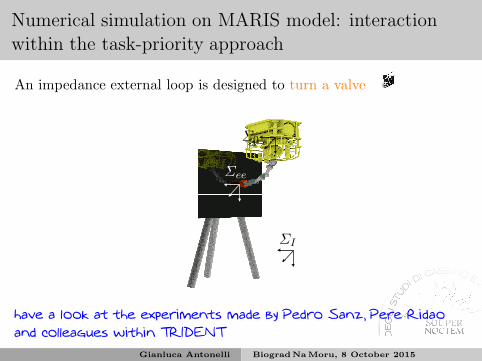
Numerical simulation on MARIS model: interaction
within the task-priority approach
An impedance external loop is designed to push a button
Σ0
ΣI
Σee
Gianluca Antonelli BiogradNaMoru, 8 October 2015
Numerical simulation on MARIS model: interaction
within the task-priority approach
An impedance external loop is designed to turn a valve
Σ0
ΣI
Σee
have a look at the experiments made by Pedro Sanz, Pere Ridao
and colleagues within TRIDENT
Gianluca Antonelli BiogradNaMoru, 8 October 2015
The presented results are the outcome of the work of several
colleagues from the University of Cassino, the Consortium ISME
and PRISMA, the projects DEXROV and MARIS
Filippo Arrichiello, Elisabetta Cataldi, Stefano Chiaverini, Paolo Di Lillo