UNIVERSIDAD A UTONOMA METROPOLITANA UNIDAD IZTA PA LA PA ’DIVISION CBI N INGENIERIA EN ENERGIA SEMINARIO DE PROYECTO I Y II. PROYECTO // Znvtzora Pntzo José (+e. Mntrículn: 91222050. MLvico, D.F., U6 (le Dicienzhre de 1997. <
Transcript
UNIVERSIDAD A UTONOMA METROPOLITANA UNIDAD IZTA PA LA PA
’DIVISION CBI
N INGENIERIA EN ENERGIA
SEMINARIO D E PROYECTO I Y II .
PROYECTO
// Znvtzora Pntzo José (+e. Mntrículn: 91222050.
MLvico, D.F., U6 (le Dicienzhre de 1997. <
INDICE
Objetivo
Introducción
Capítulo l . Descripción del sistema de refrigeración.
Ciclo de Carnot. Refrigeración por compresión de vapor Posibilidad de ahorro energético.
Capítulo 2. Propiedades de los motores monofásicos y compresores.
Motores de inducción monofásicos de baja potencia. Ventajas de los motores de asíncronos. Compresores reciprocantes.
Capítulo 3. DiseRo del sistema de control de frecuencia.
Controladores de velocidad para motores de A.C. Descripción del servomecanismo electrónico. Diseño del controlador.
Capítulo 4. Adaptación del dispositivo retroalimentado.
Respuesta del circuito. Descripción del ensamble. Funcionamiento.
Observaciones y conclusiones.
Bibliografia.
Objetivo: Desarrollar y adaptar un sistema electrónico de control mediante el cual se obtenga un ahorro de energía en los equipos de refrigeración existentes.
Actualmente el costo de la energía se está incrementando debido a que cada vez es más dificil obtenerla, al aumento incesante de la demanda de diferentes formas de energía y a que los recursos de los cuales se obtiene dicha energía son cada vez más escasos. Pensar en el ahorro de la energía no es nada nuevo, pero cualquier intento que se realice con este fin, producirá grandes beneficios, uno de ellos es el ahorro económico y otro más de importancia es el ecológico. La energía eléctrica aparentemente es más limpia que la energía liberada por la combustión, pero cuando consideramos que el 70% de la energía eléctrica que consumimos diariamente en nuestro país proviene de centrales termoeléctricas quizá esto no sea del todo cierto. La transformación de energía calorífica de la combustión a energía eléctrica no es muy eficiente, por lo que para producir una unidad de electricidad se necesitan tres de calor, sea cual here la unidad de medida utilizada, así, para la enorme demanda eléctrica del país se necesita quemar una cantidad muy grande de combustibles, con la correspondiente cantidad de productos de combustión y por tanto una gran contribución a la contaminación ambiental.
Se debe convencer al consumidor o usuario de la energía de que ahorrar no solo le trae beneficios a éI en lo particular sino a la comunidad en su conjunto. Podemos obtener más ahorros en cuanto tengamos más sistemas optimizados.
El ahorro es, en cierta manera, un concepto económico y como tal va asociado al concepto tiempo. Un equipo consume tanta más energía cuanto más tiempo funciona. Energéticamente cuesta más dinero cuanto más tiempo hnciona. Así pues, el ahorro debe ser una preocupación del usuario del equipo, del consumidor del recurso, el cual debe tener también la adecuada sensibilidad frente a la conservación de la energía.
El uso de la energía eléctrica se puede dividir a groso modo en alumbrado, herza motriz y usos térmicos. Dentro de los usos térmicos está la refrigeración. Para la producción de frío que utilizan energia eléctrica se cuenta con sistemas de compresión de vapor y con novedosos sistemas adaptados como los de efecto termoeléctrico. Sin embargo, a menudo se utilizan sistemas de compresión de vapor basados fundamentalmente en el empleo de compresores mecánicos. AI referirnos a la industria de la refrigeración, estamos englobando todas las aplicaciones. Estas aplicaciones se agrupan en seis categorías: refrigeración industrial, refrigeración marina y de transportación, acondicionamiento de aire para producir confort, acondicionamiento de aire industrial, refrigeración para aplicaciones comerciales, y finalmente refrigeración doméstica.
El campo de la refrigeración doméstica está limitado principalmente a refrigeradores y congeladores caseros. Sin embargo, debido a que es muy grande el número de unidades de
servicio, la refrigeración doméstica representa una parte muy significativa de la refrigeración industrial.
Las unidades domésticas generalmente son de tamaño pequeño teniendose capacidades de potencia que fluctúan entre 1/20 y 112 hp y los cotnpresores utilizados son del tipo de sellado hermético.
La refrigeración comercial comprende el diseño, instalación y mantenimiento de unidades de refrigeración del tipo que se tienen en establecimientos comerciales para su venta al menudeo, restaurantes, hoteles e instituciones que se dedican a almacenamiento, exhibición, procesamiento y distribución de artículos perecederos de todos tipos.
Los compresores empleados en la industria frigorífica son de diferentes tipos, entre los cuales tenemos, compresores de paletas, alternativos, centríhgos y de tornillo, algunos de ellos se ocupan para pequeñas potencias, otros para altas potencias o ambas. La mayor parte de ellos utilizan u n motor eléctrico para accionar el compresor. Cuando se tienen equipos de alta potencia se utilizan controladores para el motor eléctrico con el fin de optimizar su funcionamiento y tener un ahorro sustancial de energía y con ello ahorros económicos.
A pesar de éste conocimiento, en los hogares el uso de sistemas retroalimentados y equipos de estado sólido para control de flujo de refrigerante en aparatos de refrigeración no ha sido considerado sino hasta recientes épocas. En algunos lugares del mundo se hacen investigaciones sobre esta posibilidad. En el hogar los aparatos que más consumen energía eléctrica son la lavadora, el refrigerador y la televisión, siendo estos dos últimos de utilización muy amplia. Para el refrigerador la utilización es muy difundida, en millones de hogares y comercios éstos funcionan durante las 24 horas.
Los refrigeradores caseros son probablemente los más versátiles y son los más ampliamente usados en todas las unidades comerciales. Además de utilizarse en el hogar, los clientes típicos de estas unidades son tiendas de abarrotes, carnicerías, panaderías, cafeterías, farmacias, florerías, hoteles e instituciones de todas especies. Mientras que algunos de estos refrigeradores se utilizan sólo para almacenar, otros se usan tanto para almacenar como para exhibir.
Este proyecto esta enfocado en el sentido de obtener ahorros en los aparatos de refrigeración doméstica. Un ahorro pequeño de algunos watts-hora en cada hogar daría como resultado que una planta termoeléctrica se pudiera cerrar o que esa energía hese utilizada para otros fines por otras personas que no cuentan con el recurso.
Capítulo 1 . Descripción del sistema de refrigeración.
Se define a la refrigeración como la rama de la ciencia que trata con los procesos de reduccicin y mantenimiento de la temperatura de un espacio o material a temperatura inferior con respecto de los alrededores correspondientes.
Para lograr lo anterior, debe sustraerse calor del cuerpo que va a ser refrigerado y ser transferido a otro cuerpo cuya temperatura es inferior a la del cuerpo refrigerado. Debido a que el calor eliminado del cuerpo refrigerado es transferido a otro cuerpo, es evidente que refrigeración y calefacción son en realidad los extremos opuestos del mismo proceso. A menudo, sólo el resultado deseado distingue a uno del otro.
El ciclo de refrigeración con vapor se obtiene invirtiendo el ciclo de Carnot de potencia de vapor. L a figura 1.1 muestra el esquema y el diagrama T-s de un ciclo de Carnot de refrigeración que opera entre un foco a temperatura Tf y otro foco a mayor temperatura Tc. El ciclo lo ejecuta un refrigerante que circula a régimen estacionario a través de una serie de equipos. Todos los procesos son internamente reversibles. También, como la transferencia del calor entre el refrigerante y cada foco ocurre sin diferencia de temperaturas, no hay irreversibilidades externas.
qs T Tc Condcnsador
Figura 1.1 Ciclo de Carnot de refrigeración con vapor
Siguiendo el flujo de refrigerante comenzamos por la entrada al evaporador. El refrigerante entra en el evaporador como una mezcla de líquido y de vapor en el estado 4. En el evaporador parte del refrigerante cambia de fase líquida a vapor como consecuencia del calor transferido del foco a temperatura Tf al refrigerante. L a temperatura y presión del refr-igerante permanecen constantes durante el proceso que va desde el estado 4 hasta el estado I . El refr-iyerante se comprime entonces adiabáticamente desde el estado 1, donde está como vapor saturado. Durante el proceso, la temperatura del refrigerante se incrementa desde Tf a Tc, y la presión también aumenta. El refrigerante pasa desde el compresor hasta el condensador, donde cambia de fase desde vapor saturado hasta líquido saturado debido al calor transferido al foco de temperatura Tc. La presión y la temperatura permanecen constantes en el proceso que va desde el estado 2 hasta el estado 3. El refrigerante vuelve a su estado de entrada en el evaporador después de su expansión adiabática en una turbina. En este proceso desde el estado 3 hasta el estado 4 la temperatura decrece desde Tc a Tf, y hay un descenso en la presión.
Como el ciclo de Carnot de refrigeración está formado por procesos reversibles, el área en el diagrama T-s es el calor transferido. El área I-a-b-4-1 es el calor aportado al refrigerante desde el foco frío por unidad de masa de refrigerante. El área 2-a-b-3-2 es el calor cedido por el refrigerante al foco caliente por unidad de masa de refrigerante. El área cerrada 1-2-3- 4-1 es el calor neto transferido desde el refrigerante. El calor neto transferido desde el refrigerante es igual al trabajo neto realizado sobre el refrigerante. El trabajo neto es la diferencia entre el trabajo que entra al compresor y el trabajo que sale de la turbina ( que en un ciclo de refrigeración real es una válvula de expansión ).
El índice de eficacia de un sistema de refrigeración no es una eficiencia, sino una relación conocida como coeficiente de operación. El coeficiente de operación COP de cualquier ciclo de refrigeración es la relación entre el efecto refrigerante (efecto deseado) y el trabajo neto necesario para producir dicho efecto (lo que se suministró, es decir, lo que cuesta). Para el ciclo de Carnot de refrigeración con vapor representado en la figura 1.1 .b, el coeficiente de operación es:
COP = Calor que entra I trabajo neto.
= hl - h4 I h2 - hl donde:
qe es el calor retirado del evaporador. wc es el trabajo efectuado por el compresor. wt es el trabajo efectuado en la válvula de expansión. h, es la entalpía del refrigerante en el estado “X”.
para el caso de un ciclo inverso de Carnot se tiene:
COP Tf AS / { (Tc - T f ) AS }
= Tf / ( TC - Tf ). """"""""""- Ec. 1 . 1 donde:
Tf es la temperatura del foco fi-ío ( a la cual se encuentra el espacio refrigerado ) Tc es la temperatura del foco caliente ( a la cual se encuentra el condensador ). As es el cambio en la entropía entre el estado 2 y el estado 1.
Esta ecuación representa el coeficiente máximo teórico de cualquier ciclo de refrigeración que opera entre los focos Tf y Tc.
Los sistemas reales de refrigeración con vapor se apartan significativamente del ciclo ideal que se ha considerado y tienen un coeficiente de operación menor que el que se calcula con la ecuación I . 1.
Una de las diferencias más significativas respecto del ciclo ideal es la transferencia de calor entre el refi-igerante y los dos focos. En sistemas reales esta transferencia de calor no ocurre reversiblemente conlo se ha propuesto antes. En particular, producir una transferencia de calor suficiente para mantener la temperatura del foco frío a Tf, con un evaporador práctico, requiere que la temperatura del refrigerante en el evaporador, T f debe ser algunos grados menor que Tf. Esto explica la localización de la temperatura Tf en el diagrama T-s de la figura 1.2. De forma similar, obtener una transferencia de calor suficiente desde el refrigerante al foco caliente exige que la temperatura del refrigerante en el condensador, Tc', sea superior en algunos grados a Tc. Esto explica la localización de la temperatura Tc en el diagrama T-s de la figura 1.2.
' T Tc' 3 2 Temperatura del
condensador Tc'
Tc Temperatura del foco caliente Tc .
TT Tr .
Temperatura del foco frío 4 Tf
Temperatura del evaporador T f
I I b b a S
Figura 1.2. Comparación de las temperaturas del condensador y el evaporador con las temperaturas de los focos caliente y frío.
Mantener las temperaturas del refrigerante en los intercambiadores de calor a Tf ' y Tc' en lugar de Tf y Tc, respectivamente, tiene el efecto de reducir el coeficiente de operación. Esto se puede ver de la expresión del coeficiente de operación del ciclo de refrigeración de la figura 1.2.
Comparando las áreas que intervienen en las expresiones para el cálculo del coeficiente de operación COP,,,sx. y COP' dados anteriormente, se concluye que el valor de COP' es menor que COP,,,i,. Esta conclusión sobre el efecto de la temperatura en el coeficiente de operación también es aplicable a otros esquemas o configuraciones en los ciclos de refrigeración.
Además de las diferencias de temperatura entre el refrigerante y las regiones caliente y fría, hay otros hechos que hacen que el ciclo de Carnot de refrigeración con vapor sea impráctico.
En la figura I . l . El ciclo de compresión de vapor desde el estado 1 hasta el estado 2 ocurre con el refi-igerante como mezcla de las fases líquido y vapor. Esto se conoce comúnmente como compresión húmeda. La compresión húmeda se evita normalmente ya que la presencia de gotas de liquido puede averiar el compresor. En sistemas reales, el compresor procesa solamente vapor. Esto se conoce como compresión seca.
Otro hecho que hace impráctico el ciclo anterior es el proceso de expansión desde líquido saturado en el estado 3 hasta la mezcla líquido vapor a baja temperatura en el estado 4. Esta expansión produce relativamente poca cantidad de trabajo comparada con el trabajo necesario en el proceso de compresión.
El trabajo producido por una turbina real será mucho menor porque la turbina que opera en estas condiciones tiene eficiencias bajas, además que resulta económicamente incosteable. Consecuentemente, se renuncia al trabajo obtenido en la turbina y se sustituye por una válvula de estrangulación.
Los componentes del ciclo resultante se ilustran en la figura 1.3, donde se supone una compresión seca. Este ciclo se conoce como refrigeración por compresión de vapor.
TC T qs Condcnsador
Val\wla dc espnnsión
sobrccalentado Evaporador. Tf 1 qc
Figura 1.3. Sistema de refrigeración por compresión de vapor.
En la práctica, para la refrigeración suele emplearse un diagrama P-h en vez del diagrama T- S como el que se muestra en la figura 1.4, en donde se ilustra el mismo proceso.
P t
I 11
Figura 1.4. Diagrama P-h del ciclo de refrigeración.
El sistema de la figura anterior es de los más utilizados actualmente, en los siguientes párrafos se hará una descripción de su funcionamiento.
El calor transferido desde el espacio refrigerado al refrigerante, a su paso por el evaporador produce su vaporización. Para el volumen de control que incluye el evaporador, el balance de energía da el calor transferido por unidad de masa de refrigerante.
q, = hl - h4. """""""""-" Ec. 1.3
El calor transferido qc se define como capacidad de refrigeración.
El refrigerante deja el evaporador y es comprimido a una presión relativamente alta por el compresor. Asumiendo que éste opera adiabáticamente, el balance de energía, para el volumen de control que incluye al compresor da:
W, = h2 - hl. """""""""" Ec. 1.4.
donde wC es el trabajo necesario para comprimir la unidad de masa de refrigerante.
Después, el refi-igerante pasa a través del condensador, donde se condensa y hay una transferencia de calor desde el refrigerante al medio que lo enfría. Para el volumen de control que incluye al condensador el calor transferido desde el refrigerante por unidad de masa es:
(Is = h2 - h3 . """""""""" Ec. 1.5.
Finalmente, el refrigerante en el estado 3 entra a la válvula de expansión y se expande hasta la presión del evaporador. Este es un proceso de estrangulación, cuyo balance de energ,' 'la es:
hd = h3 """""""""" Ec. 1.6.
L a presión del refrigerante disminuye en la expansión adiabática irreversible, y va acompañada de un aumento de la entropía específica. El refrigerante sale de la válvula de expansión en el estado 4 como una mezcla de líquido y vapor.
En el sistema con compresión de vapor, el trabajo neto que recibe es igual al del compresor, ya que en la válvula de expansión no entra ni sale trabajo. Utilizando las expresiones anteriores, el coeficiente de operación del sistema de refrigeración de la figura 1.3 es
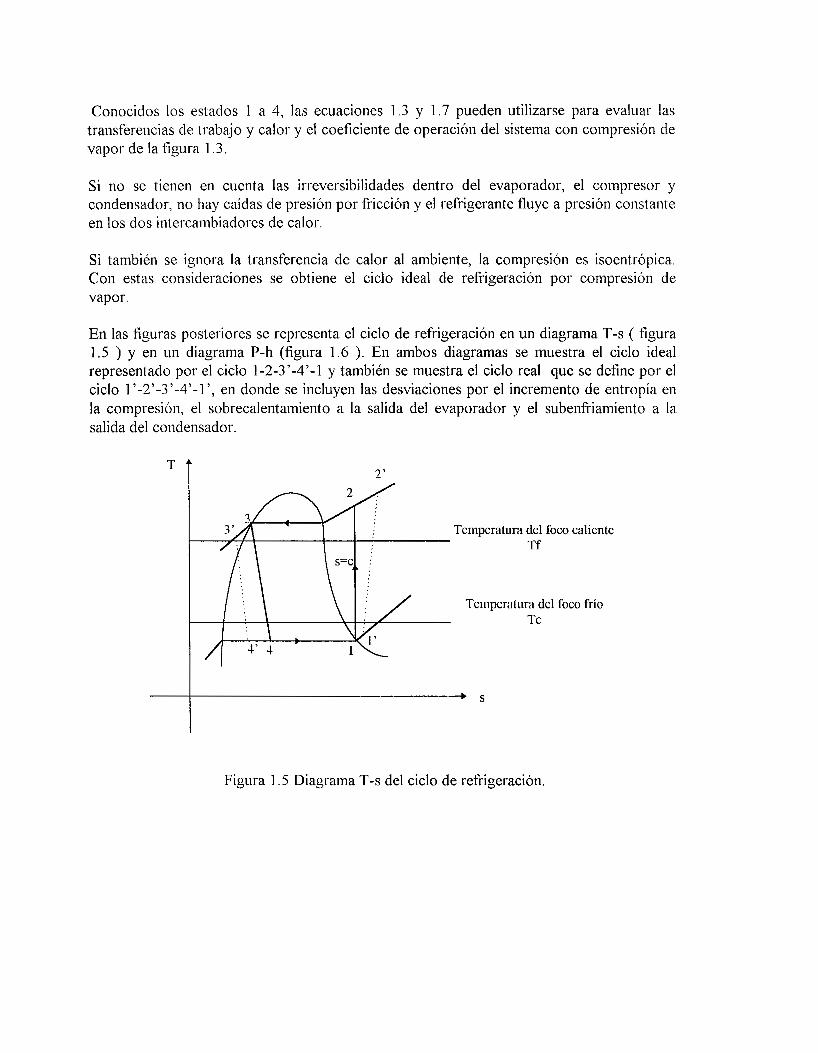
Conocidos los estados 1 a 4, las ecuaciones 1.3 y 1.7 pueden utilizarse para evaluar las transferencias de trabajo y calor y el coeficiente de operación del sistema con compresión de vapor de la figura 1.3.
Si no se tienen en cuenta las irreversibilidades dentro del evaporador, el compresor y condensador, no hay caídas de presión por fricción y el refrigerante fluye a presión constante en los dos intercambiadores de calor.
Si también se ignora la transferencia de calor al ambiente, la compresión es isoentrópica. Con estas consideraciones se obtiene el ciclo ideal de refrigeración por compresión de vapor.
En las figuras posteriores se representa el ciclo de refrigeración en un diagrama T-S ( figura 1.5 ) y en un diagrama P-h (figura 1.6 ). En ambos diagramas se muestra el ciclo ideal representado por el ciclo 1-2-3’-4’-1 y también se muestra el ciclo real que se define por el ciclo 1’-2’-3’-4’-1’, en donde se incluyen las desviaciones por el incremento de entropía en la compresión, el sobrecalentamiento a la salida del evaporador y el subenfriamiento a la salida del condensador.
T f 2’
I I ’; \
Is Figura 1.5 Diagrama T-s del ciclo de refrigeración.
Figura 1.6 Diagrama P-h del ciclo de refrigeración.
Todos los procesos del ciclo anterior son internamente reversibles excepto la estrangulación. A pesar de este proceso irreversible, el ciclo se conoce como ciclo ideal, y se representa a veces con vapor saturado, estado 1 en la entrada del compresor y con líquido saturado, estado 3, en la salida del condensador.
En las figuras 1.5 y 1.6 también se muestra el ciclo 1’-2’-3’-4’-1’, que ilustra la desviación del sistema real respecto al ideal. Esta desviación se debe a las irreversibilidades internas presentes durante la compresión, lo que se representa mediante una línea discontinua para indicar el proceso de compresión del estado 1’ al 2’. Esta línea refleja el incremento de entropía específica que acompaña a la compresión adiabática irreversible. El efecto de la compresión irreversible se puede contabilizar utilizando el rendimiento isoentrópico del compresor dado por
Debido a los efectos de fricción, que provocan caídas de presión en el refrigerante que fluye a través del evaporador, el condensador y las tuberías que conectan los componentes, aparecen desviaciones adicionales al ciclo ideal, sin embargo éstas son pequeñas y se desprecian.
Un sistema de refrigeración está dividido en dos partes de acuerdo a la presión a la que está sujeta el refrigerante en las dos partes. La parte de presión baja del sistema consiste del control de flujo de refrigerante, el evaporador y el tubo de succión. La presión ejercida en esas partes es baja, a esa presión el refrigerante es vaporizado en el evaporador.
El lado de alta presión del sistema consiste del compresor, el tubo de descarga, el condensador, el tanque receptor y el tubo de líquido. La presión del refrigerante en esta parte del sistema es alta, bajo la cual el refrigerante se condensa o licúa en el condensador.
Los puntos comprendidos entre los lados de baja y de alta presión del sistema son el control de flujo de refrigerante, donde la presión del refrigerante es reducida desde la presión condensante hasta la presión vaporizante y, la válvula de descarga del compresor, a través de la cual sale el vapor de alta presión después de la compresión.
Debido a que el calor siempre fluye de una región de temperatura alta a una región de temperatura baja, siempre se tendrá un flujo de calor hacia la región refrigerada de los alrededores calientes. Para limitar el flujo de calor hacia la región refrigerada de manera que sea un mínimo, resulta necesario aislar la región de sus alrededores con un buen material aislante.
La velocidad a la cual deba ser el calor eliminado de un espacio o material refrigerado a fin de producir y mantener las condiciones deseadas de temperatura se le llama carga de refi-igeración, la carga de enfriamiento o la carga térmica. En casi todas las aplicaciones de refrigeración la carga de enfriamiento del equipo de refrigeración es la suma de las ganancias de calor proveniente de diferentes fuentes:
1. El calor transmitido por conducción a través de las paredes aisladas.
2. El calor que debe ser eliminado del aire caliente que llega al espacio a través de puertas que se abren y se cierran.
3. El calor que debe ser eliminado del producto refrigerado para reducir la temperatura del producto a la temperatura de almacenamiento y,
4. El calor cedido por la gente que trabaja, por motores, alumbrado y otros equipos que producen calor y que operan en dicho espacio.
En cualquier proceso de refrigeración, la sustancia empleada para absorber calor o agente de enfriamiento, se le llama refrigerante.
Todos los procesos de enfriamiento pueden clasificarse ya sea como sensibles o latentes de acuerdo al efecto que el calor absorbido tiene sobre el refrigerante. Cuando el calor absorbido causa un aumento en la temperatura del refrigerante, se dice que el proceso de enfriamiento es sensible, mientras que cuando el calor absorbido cause un cambio en el estado fisico del refrigerante, se dice que el proceso de enfriamiento es latente. Para cualquiera de ambos procesos si el proceso refrigerante es secuencial, la temperatura del refrigerante debe mantenerse en forma continua abajo de la del material o del espacio que está siendo refrigerado.
Las unidades condensantes de pequeño caballaje son equipadas a menudo con unidades de motor-compresor herméticamente selladas. El ensamble consiste en un compresor impulsado directamente el cual está instalado en el mismo eje del rotor del motor estando el ensamble herméticamente sellado en una cubierta soldada de acero. Estas unidades se utilizan en sistemas comerciales pequeños
Pasihilirlrd (le ([horro energética.
Para los sistemas de refrigeración actuales existen muchas posibilidades de ahorro. En grandes equipos es donde se realizan mayores investigaciones, algunas son para mejores materiales aislantes o de intercambiadores. Hay mejoras en la disposición y geometría de los evaporadores y condensadores, así como estudios para su instalación y utilización. Se han construido avanzados controles de velocidad en los motores para regular el flujo másico de refrigerante así como también mejores sensores de temperatura para manipular el trabajo del compresor.
Todo lo anterior generalmente se realiza para equipos de refrigeración grandes en donde las personas que los utilizan buscan además de su desempeño, un ahorro económico que de alguna manera es consecuencia de un ahorro de energía. En los equipos de refrigeración domésticos y de pequeños comercios también se pueden utilizar estos conocimientos adaptados previamente. Las posibilidades de ahorro pueden ser pequeñas, pero en su conjunto pueden ser importantes.
Hay diferentes aspectos que se deben considerar en las unidades de refrigeración domésticas antes de pensar en las posibilidades de ahorro.
En lugares calurosos y con escasa humedad, el refrigerador trabajará más y en forma continua, es decir, con pocos periodos de descanso. De ahí que un aparato de este tipo consuma mayor energía que en un clima templado y en ocasiones no enfríe lo suficiente los
alimentos. En un clima frío un refrigerador tiende a trabajar menos y generalmente congela casi todos los alimentos, incluso las verduras y los vegetales. Cuando en climas templados el refrigerador consume demasiada energía, no enfría los alimentos, o en climas fríos los congela , el problema se puede corregir variando los controles de temperatura del aparato. Sin embargo, dado que el cambio es manual no se puede corregir continuamente para satisfacer los requerimientos y mantener la temperatura y las condiciones de frío como se requieren. Con un sensor de temperatura electrónico el control automático de temperatura mantendría las condiciones si se retroalimenta manipulando así los periodos de funcionamiento del compresor o el flujo de refi-igerante.
Los refrigeradores domésticos modernos trabajan con un tercio menos de la energ' ria que consumían los que se fabricaban hace una década. Respondiendo a las demandas del consumidor y a los requerimientos de las autoridades correspondientes, se han creado nuevas alternativas para disminuir el consumo de energía de estos aparatos, gracias a lo cual fue posible establecer un nuevo criterio industrial: " la eficiencia energética ". En un futuro no muy lejano los refi-igeradores probablemente tendrán envolventes que sean mejores aislantes, con gases refrigerantes menos agresivos al ambiente y compresores que consuman un tercio de energía en comparación con los modelos actuales.
Los refrigeradores que cuentan con deshielo manual consumen mayor cantidad de energía cuando se forma una gruesa capa de escarcha en el evaporador lo cual hace que el ciclo de refrigeración sea ineficiente. Aún así el consumo de energía eléctrica es menor que en los refrigeradores que cuentan con deshielo semiautomático que a su vez consumen menor energía que aquellos que cuentan con deshielo automático. La razón de esto es que en los modelos que utilizan deshielo automático, se emplea una resistencia eléctrica que produce calor y derrite la escarcha formada alrededor de los tubos que transportan el refrigerante en el evaporador. Sin embargo los refi-igeradores con deshielo automático se están haciendo cada vez mis populares, con lo cual se ve afectado el consumo de energía eléctrica con un drástico incremento. Si buscamos la forma de que las unidades de refrigeración cuenten con sistemas más eficientes, o que el frío generado se distribuya uniformemente dentro de la unidad, se podría contar con equipos con mayores facilidades para el usuario, es decir, con deshielo automático, circulación interna del aire dentro del espacio refrigerado y regulación automática de temperatura, pero que mantengan una eficiencia energética alta.
Existen estudios de consumo energético, calidad y características de los refrigeradores domésticos que se ofrecen en el mercado nacional realizados por la PROFECO en sus laboratorios de pruebas de calidad. Una de estas investigaciones incluyó el análisis de 28 modelos correspondientes a nueve marcas de refrigeradores de manufactura tanto nacional como de importación, con diferente capacidad y diversos sistemas de deshielo: manual, semiautomático y automático. (revista del consumidor, marzo 1997).
Dentro del estudio efectuado se reportaron datos generales y características de la marca o modelo en cuestión pero también se reportó el consumo de energía máximo anual en I<Wh/año seííalado en la etiqueta del producto y aprobado por la Comisión Nacional de Ahorro de Energía. Según esto el consumo para los refrigeradores es como sigue:
Con deshielo automático varía entre 562.1 KWWaño para capacidades entre 283 y 339.6 decímetros citbicos y 729 KWWaíío para capacidades entre 367.9 y 452.8 dm', con precios por unidad entre $3,337.00 y $5,600.00.
Para refrigeradores con deshielo semiautomático el consumo varía entre 458.1 I<Wh/afio para capacidades entre 212.2 y 240.5 dm' y 520.6 KWhIaíío para capacidades entre 268.8 y 3 I 1.3 dm' con precios por unidad entre $2,610.00 y $3,264.00,
y por idtimo para refrigeradores de deshielo manual varía entre 280.2 KWhIaño para una capacidad de 84.9 dm3 y 432.41KWhlaño para una capacidad de 3 11.3 dm3 con precios por unidad entre $1,602.00 y $2,436.00.
De estos datos podemos ver que los precios no están en relación directa al consumo de energía anual y sabemos que están más relacionadas con las características del aparto, sin embargo vemos que en todos ellos existe posibilidad de ahorro energético lo cual implica necesariamente un ahorro económico al cliente. Si reducimos su consumo en un uno por ciento en cada refrigerador, en su conjunto tendríamos un gran ahorro potencial debido a que este producto es utilizado en muchos hogares, tiendas de servicios, pequeíios comercios, etc.
Quizá el empleo de dispositivos que eficienten su fhcionamiento implique un aumento en el costo de los equipos pero como sabemos, el empleo de dispositivos de estado sólido es cada vez más común y los costos se reducen. Además si se construyeran a gran escala y con mejor tecnología estos costos son mínimos y solamente se tomarían en cuenta en la inversión inicial pudiendo dar la opción de tener un uso generalizado de tales dispositivos.
En este proyecto se usarán los conocimientos existentes en el manejo de controladores de frecuencia que se utilizan para equipos de refrigeración con motores trifásicos que accionan el compresor y trataremos de implementarlo en equipos de baja capacidad que ocupan motores monofásicos de baja potencia para accionar el compresor. Además también se utilizará un tipo diferente de termostato para determinar cuál es el tiempo que debe de fbncionar el compresor. Utilizando termopares para retroalimentar el sistema de control de flujo de refrigerante determinaremos de manera diferente el tiempo de funcionamiento del compresor.
Para realizar lo anterior comenzaré por describir las características del equipo a utilizar como lo son los motores de inducción monofásicos y los compresores mecknicos, posteriormente cuales son los equipos de control utilizados industrialmente y como se pueden adaptar a nuestro equipo y finalmente el equipo ya instalado.
Capítulo 2.
Propiedades de los motores monofásicos y compresores.
En la industria de la refrigeración se emplean motores de corriente continua trifisicos y monofásicos de diferentes tipos para impulsar compresores, bombas y ventiladores. En muy pocas ocasiones se emplean motores de corriente eléctrica de dos fases.
El tamaíio de los motores monofásicos comprende desde aproximadamente 1/20 hp hasta 10 hp, mientras que para motores trifásicos. Los tamaños varían desde aproximadamente 1/3 hp, aunque es raro encontrarlos con capacidades menores de 1 hp hasta varios cientos.
LOS motores monofásicos comúnmente utilizados en la industria de la refrigeración son de los siguientes tipos:
l . Motores de fase partida. 2. Motores con capacitor de arranque. 3. Motores con capacitor de arranque y operación. 4. Motores con capacitor permanente. 5. Motores de polos sombreados.
Los motores de inducción monofásicos tienen capacidades nominales desde una pequeña fracción de un caballo de potencia, hasta cerca de 10 hp. Es generalmente mejor usar motores de inducción trifásica que motores de inducción monofásica cuando los requerimientos exceden un caballo de potencia, considerando que la alimentación trifásica está disponible. Sin embargo, en muchas instalaciones tales como cargas domésticas, solamente se tiene disponible la alimentación monofásica, que excluye el uso de motores trifásicos convencionales. Los motores de inducción monofásicos, como los motores de inducción trifisicos tienen una característica: mantienen una velocidad casi constante, y se usan para impulsar equipos domésticos como ventiladores, refrigeradores, máquinas lavadoras, trituradores, licuadoras, etc.
Un motor de inducción trifásico puede operar como un motor de inducción monofásico una vez que está caminando, abriendo una de las fases del estator. Con el objeto de hacer efectiva la utilización de materiales en términos de valores nominales, solamente cerca de 2/3 de las ranuras por polo están normalmente ocupadas por el embobinado del estator. Si en lugar de eso todas las ranuras estuvieran ocupadas, los valores nominales del embobinado del estator se aumentarían en una relación de 1 / 0.866 6 1.1 S, mientras que la cantidad de embobinado del estator y las pérdidas de cobre aumentarían cada una un SO YO.
Los motores de inducción monofásicos tienen generalmente rotores de jaula de ardilla, y no pueden arrancar como tal, pero una vez que arranca en una dirección dada por medios mecánicos, desarrolla un par en esa dirección y alcanzará la velocidad sincrónica si el par de carga no es excesivo.
Los métodos usados mis ampliamente para arrancar motores de inducción monofásicos incorporan una característica; producir un campo magnético rotatorio en el punto de reposo y se clasifican de la siguiente manera:
a) motor de fase partida.
b) motor de arranque con capacitor.
c) motor de polos sombreados.
Los motores de fase partida y de arranque con capacitor tienen dos embobinados del estator, es decir, un embobinado principal y otro auxiliar desplazados entre sí 90" medidos eléctricamente, de esta manera simulando hasta cierto grado un embobinado de dos fases. El embobinado auxiliar, que se usa solamente para arrancar, tiene generalmente una menor cantidad de alambre que el embobinado principal.
Los embobinados principal y auxiliar del motor de fase partida están conectados en paralelo durante el arranque, y cuando el motor alcanza aproximadamente el 75% de su velocidad nominal un conmutador centrífugo desconecta el embobinado auxiliar.
El motor de arranque con capacitor es similar al motor de fase partida con la excepción que tiene un capacitor en serie con el embobinado auxiliar. El capacitor, generalmente un capacitor electrolítico de C.A. de tipo seco, tiene un alto valor de capacitancia con un rango entre aproximadamente 70 a 400 pf para motores de 115 v desde 1/23 hasta 1 hp, y haciendo posible para las corrientes en los embobinados principal y auxiliar el estar desplazados entre sí por aproximadamente 90' eléctricos en el arranque. Sin embargo, los capacitores electrolíticos son adecuados para una tarea intermitente y para periodos de tiempo de unos pocos segundos de duración y el embobinado auxiliar debe abrirse a medida que el motor alcanza su velocidad nominal.
Los motores asíncronos o de inducción, por ser más robustos y baratos, son los más extensamente empleados. En estos motores, el campo gira a velocidad síncrona, como en las máquinas síncronas. L a velocidad del rotor depende sólo de la frecuencia y del número de polos.
n, = f / p . donde: n es la velocidad del rotor. f es la frecuencia de la línea. P es el niumero de polos.
Teóricamente, para el motor girando en vacío y sin pérdidas, el rotor tendría también la velocidad síncrona. No obstante, al ser aplicado un par externo al motor, su rotor disminuirá de velocidad justamente en la proporción necesaria para que la corriente inducida por la diferencia de velocidad entre el campo giratorio síncrono y el rotor, pase a producir un par electromágnetico igual y opuesto al par aplicado exteriormente. El par electromágnetico es proporcional al flujo producido por el campo giratorio y a la corriente y al factor de potencia del rotor.
La pérdida de velocidad angular del motor (necesaria para que sea producido un par electromagnético), expresada por unidad de velocidad se llama deslizamiento:
donde:
S es el deslizamiento ( pérdida de velocidad angular del rotor).
W es la velocidad angular del rotor. n es la velocidad del rotor.
El par electromágnetico puede ser expresado por la relación:
c = P, I w,
donde:
Pg es la potencia del campo que gira a una velocidad angular síncrona w, radianes por segundo. Por otro lado, si P es la potencia mecánica proporcionada a través del eje, que gira a una velocidad angular w radianes por segundo.
C = P / w
Por lo tanto:
P = P g wlw,=( 1 - s ) P g .
O sea, la potencia cedida por el eje es igual a la potencia disponible en el entrehierro de la máquina Pg (potencia del campo giratorio), menos la parte correspondiente a las pérdidas en el rotor s.Pg.
La figura 2.1 muestra el comportamiento de la corriente, del factor de potencia, del par y de la potencia cedida al eje en fhnción de la velocidad del motor.
La curvas de variación de los diversos parámetros con la potencia son mostradas en la figura 2.2.
S
1.0 0.1) 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0
Figura 2.1. Características del motor de inducción.
o o/;r SOYO 100%
Figura 2.2. Características de carga del motor de inducción.
Por sus características, precio y robustez, el motor de inducción es el preferido para la mayor parte de los accionamientos.
Asociados a los conversores electrónicos de tensión y frecuencias variables, los motores de inducción tienden a asumir un papel casi exclusivo en los accionamientos eléctricos.
Un sistema de accionamiento comprende el motor eléctrico y su equipamiento de mando y/o control, los órganos de transmisión (mecánica) de energía del motor a la máquina accionada y la propia máquina accionada que realiza la unión deseada.
Para un sistema dotado de movimiento de rotación
Donde:
I? es la potencia desarrollada.
W es la velocidad angular del movimiento. C es el par motor desarrollado.
Decir que una carga mecánica requiere una determinada potencia P es equivalente a afirmar que tal carga necesita de un par dado C a una velocidad dada de rotación.
Matemkticamente existen infinitas combinaciones de C y w de modo que den el mismo valor P; fisicamente, sin embargo, una carga mecánica específica asocia a un par Único ( C,w) la potencia P. La curva en C, en fbnción de w muestra tal dependencia, y es una característica fundamental para el proceso de selección del motor adecuado al accionamiento, con vistas a un funcionamiento estable, económico y satisfactorio.
En función de sus características de par velocidad, se pueden dividir las cargas mecánicas en seis grandes grupos:
l . Par c o ~ ~ s t n ~ l e , prácticamente independiente de la rotación ( figura 2.3 .a ), como son grim, cabrestantes, transportadores de correa bajo carga constante.
2. Par q l ~ e vario lirlenlmertte con In mtncicin ( figura 2.3.b ), como molinos de rodillos bombas de pistón, cepillos y sierras para madera.
3. Par que 11nrin con el cr~adrado de la velocidad de rofncidn ( figura 2.3.c variación parabólica ). Ejemplos: ventiladores, mezcladoras, centrifugadoras, bombas centrífugas, bombas de vacío , compresores.
5. Pas que varía de fornln unifornte con In 1-otncicirl, no siendo suficientemente exactas las aproximaciones por funciones matemáticas, figura 2.4. Ejemplo: horno rotativo de altas prestaciones.
6. (Targas qz~e 110 solicifm pares ( vo/nnfes ). El propósito del volante es liberar la mayor parte de la energía cinética en él almacenada para los picos de demanda de energía por parte de la máquina accionada. El motor accionado debe, por lo tanto, dejar de actuar, esto es, de transferir energía, en condiciones de altos pares, pero teniendo la misión de restaurar al volante su velocidad original, lo cual se lleva a cabo entre los picos de demanda.
Par lllOt01
-
Par motor
Figura 2.3. Curvas par-motor vs. velocidad angular
1 /8 1/4 1/2 3 I4 Vucltas del homo rotativo.
Figura 2.4. Par que varía uniforme con la rotación.
Es la curva que muestra la dependencia entre el par desarrollado por un motor eléctrico y su velocidad angular; en general, el comportamiento de esta curva característica de los motores es distinto del de las cargas, pues, al revés de las cargas adicionales, los motores eléctricos tienden a presentar un decrecimiento del par motor para velocidades crecientes.
Se define como “regulación de velocidad’ de un motor eléctrico, que proporciona a la carga mecánica un valor dado de potencia, la relación:
R = ( n o - n ) / n
donde:
no = Wo / 2n es la rotación del motor eléctrico en vacío ( es decir, sin ninguna carga
n = W / 2n: es la velocidad del motor accionando la carga. solicitándolo )
L a regulación de la velocidad es un parámetro para la caracterización de los distintos tipos de motores eléctricos, en hnción de los valores asumidos (por la regulación de velocidad) para cada velocidad.
Los motores asínct-onos más frecuentemente denominados de inducción, son motores cuyo par disponible disminuye en la medida en que la velocidad aumenta, a partir de una cierta velocidad. La figura 2.5 muestra una curva típica con indicaciones de los valores relevantes.
Figura 2.5. Curva par velocidad para motores de inducción jaula de ardilla.
En el caso de motores de inducción de rotor devanado, el formato de la curva de par- velocidad puede ser alterado por la inserción de una resistencia externa en el arrollamiento rotórico; en la medida en que la resistencia intercalada crece, la velocidad angular con que se desarrolla el par máximo se hace menor sin que éste se altere significativamente, hasta que el par máximo pasa a producirse en la condición de arranque ( velocidad nula ), a partir de donde, por la inserción de mayor resistencia en el rotor, hay decrecimiento en el par de arranque. Figura 2.6.
Resistencia inducida 4
Res11 Rest? Rest3
Velocidad angular 01
Figura 2.6. Curva par-velocidad para motores de inducción de rotor devanado, para diferentes valores de resistencias externas introducidas.
Es usual la introducción del concepto de “par básico” para expresar los diversos valores de par del motor como porcentajes de éste par básico. Se define como par básico la relación entre la potencia nominal y la velocidad síncrona; en el caso del motor de inducción, por lo tanto, u n valor numérico consecuente de una situación fisicamente imposible, pues este tipo de motor, en realidad, no desarrolla par a la velocidad angular síncrona.
Para máquinas de inducción se utiliza además el concepto de “deslizamiento” en una velocidad i siendo:
si = ( velocidad síncrona - velocidad i ) / velocidad síncrona.
y, naturalmente el deslizamiento nominal es el asociado al punto de velocidad del motor
Conyrcsorcs reciprocnntes.
Los compresores de vapor usados en la refrigeración industrial son de tres tipos principales:
l. Compresores reciprocantes o recíprocos.
2. Compresores rotatorios o de tornillo.
3. Compresores centrífugos.
En el compresor reciprocante, el miembro compresor es un pistón reciprocante, mientras que en el compresor rotatorio el miembro que comprime tiene forma de rodillo, aleta o lóbulo, Por otra parte, el compresor centrífugo no tiene miembro compresor, la compresión del vapor se obtiene principalmente por la acción de la fuerza centrífuga la cual es desarrollada a medida que el vapor es girado por un impulsor de alta velocidad.
Los tres compresores tienen ciertas ventajas en su propio campo de aplicación. Para casi todos los casos, el tipo de compresor empleado en cada aplicación especifica depende del tamaño y naturaleza de la instalación y del refrigerante usado.
El compresor reciprocante es el tipo más usado, siendo utilizado en todos los campos de la refrigeración. Se adapta muy en especial para usarse con refrigerantes que requieran desplazamientos relativamente pequeños y para presiones condensantes relativamente altas.
Se tienen compresores reciprocantes en tamaños que varían desde 1/8 hp en unidades de refi-igeración domésticas hasta unas 250 toneladas de refrigeración (esto es aproximadamente I , 180 hp) o más en instalaciones industriales grandes. El hecho de que los compresores reciprocantes puedan fabricarse económicamente en un gran rango de
tamaños y diseííos, considerando además su durabilidad y eficiencia para una gran variedad de condiciones de operación, les ha dado extensa popularidad en el campo de la refrigeración.
Los compresores reciprocantes pueden ser de acción doble o de acción simple. En los compresores de acción simple, la compresión se efectúa en un sólo lado del pistón y sólo una vez en cada vuelta del cigüeñal, mientras que en los de acción doble la compresión del vapor ocurre alternativamente en ambos lados del pistón, de modo que la compresión se efectúa dos veces por cada vuelta del cigüeííal.
La figura 2.7 es un diagrama teórico presión-volumen de un ciclo de compresión teórico
Prcsión
Pd
Ps
Claro i Descarga.
)i3 2
""............ i Volumcb told dcl cilindro
^.I ...
...
Volumen dcl claro dcl vapor espandido t
Volumen del cilindro lleno Va Vb con vapor de la succión. v c
Volulllcn.
Figura 2.7 Diagrama presión-volumen de un ciclo de compresión típico.
El desplazamiento del pistón de un compresor recíproco es el volumen total barrido en el cilindro por el pistón en un cierto intervalo de tiempo. Para un compresor típico de acción simple, el desplazamiento se calcula como sigue:
Vp=((0.7854D2)(L)(N)(n)}/1728.
Donde:
Vp es el desplazamiento del pistón en pies cúbicos por minuto.
D es el diámetro del cilindro en pulgadas.
N son las revoluciones por minuto del cigiieñal. n es el número de cilindros.
L es la longitud de la carrera en pulgadas.
El volumen del cilindro, el cual es barrido por el pistón en cada carrera es la diferencia entre el volumen del cilindro cuando está en la parte inferior y el volumen del cilindro cuando está en la parte superior.
Para calcular el trabajo realizado por el ciclo observamos que el área 1234 es igual a dicho trabajo y
donde es posible calcular las áreas 123'4' y 433'4' como si keran trabajos cíclicos correspondientes a un compresor sin espacio muerto o claro. Así, tomando la expansión como expansión politrópica pV" = C y la compresión como una compresión politrópica pV"=C , el trabajo será:
Para este caso, p3 = p2 y p4 = pl . Como el trabajo de expansión es pequeño comparado con el de compresión, el error que implica establecer que el exponente politrópico m es igual al exponente politrópico n, también es muy pequeño. Así obtenemos la siguiente ecuación que representa el trabajo cíclico que corresponde a un compresor con espacio muerto.
de otra forma el trabajo del ciclo se puede ver como:
multiplicando esta ecuación por el numero de ciclos por segundo, el trabajo total es:
analizando esta ecuación vemos que las variables n, TI, pl y p2 están determinadas por las condiciones del proceso, es decir, no podemos hacer mucho sobre ellas. En cambio podemos ver que si variamos el flujo másico podemos también cambiar en forma proporcional el trabajo del compresor, es decir, si disminuimos el flujo másico, el trabajo del compresor también disminuye lo cual sería entonces un ahorro.
Como las variables n, TI, pl y p2 están determinadas por las condiciones del proceso podemos sustituir su valor como una constante dentro de la ecuación del trabajo total efectuado por el compresor, así, se puede ver que el trabajo total del compresor es proporcional al flujo másico, esto es, para un flujo pequeño el trabajo que el compresor debe de realizar por unidad de tiempo es menor y aumenta conforme aumenta el flujo másico de vapor de refrigerante. Esto se encuentra representado en el diagrama de la izquierda en la figura 2.8.a.
Por otro lado, el compresor representa una carga cuyo par mecánico motor disminuye como una función cuadrática dependiente de la velocidad angular aplicada en el eje de rotación (figura 2.8.b.), lo cual ocasiona que el trabajo mecánico suministrado por el motor eléctrico a velocidades menores sea más bajo, así el consumo eléctrico también decrece como consecuencia de reducir el flujo másico de refrigerante.
Trabajo total dcl
compresol
-
A
L
Par
Figura 2.8. Diagramas Wc vs m y Par motor vs o.
Cnpncidcrd teciricn refrigernnte.
La capacidad refrigerante de cualquier compresor depende de las condiciones de operación del sistema y, así mismo la capacidad refrigerante, es obtenida a través de la masa de refrigerante que circula por unidad de tiempo y por el efecto refrigerante por unidad de masa circulada.
El flujo de masa manejado por el compresor es igual a la masa del vapor en la succión que el compresor admite a la entrada de la succión por unidad de tiempo. Si se supone que el compresor es 100% eficiente y que el cilindro del compresor se llena completamente con vapor de la succión proveniente de la tubería de la succión con cada desplazamiento del pistón, el volumen de vapor que pasa hacia el cilindro de compresión y que es comprimido en la unidad de tiempo, es igual al desplazamiento del pistón del compresor. La masa equivalente de esta razón de flujo de volumen es la masa de refrigerante circulado por el compresor en la unidad de tiempo y puede calcularse multiplicando el desplazamiento del
pistón del compresor por la densidad del vapor de la succión a la entrada del compresor, o dado que el volumen específico es el inverso de la densidad, el flujo de masa también se obtiene dividiendo el desplazamiento del pistón por el volumen específico del vapor de la succión, o sea:
m = Vp p = V p v. donde:
V,, es el desplazamiento del pistón del compresor. P es la densidad del vapor de refrigerante. V es el volumen específico del vapor de refrigerante.
Una vez obtenido el flujo de masa, la capacidad teórica refrigerante del compresor se obtiene multiplicando la razón de flujo de masa por el efecto refrigerante por unidad de masa.
Capacidad wj*igcrnnte real.
La capacidad refrigerante real de un compresor siempre es menor a la capacidad teórica calculada. Debido a la compresibilidad del vapor refrigerante y al claro mecánico entre el pistón y la placa de la válvula del compresor, el volumen del vapor de la succión que llena el cilindro durante la carrera del pistón siempre es menor que el volumen barrido por el pistón
El volumen real de vapor succionado por unidad de tiempo proveniente de la tubería de succión es el desplazamiento real del compresor. La relación desplazamiento real del compresor al desplazamiento del pistón es conocido como eficiencia volumétrica total o real del compresor. Entonces:
Ev= V, /V, x 100.
donde:
Ev es la eficiencia volumétrica total en YO. V, es el volumen real del vapor succionado y comprimido en la unidad de tiempo. V,, es el desplazamiento del pistón del compresor.
Al conocer la eficiencia volumétrica del compresor, podrá obtenerse el desplazamiento real y la capacidad refrigerante como sigue:
V a = Vp x E v / 100. Y
Capacidad de refrigeración real = capacidad de refrigeración teórica x Ev I 100
Capítulo 3.
Diseño del sistema de control de frecuencia.
En muchos sistemas modernos de velocidad variable se necesita un control continuo de velocidad con buena estabilidad y una buena eficiencia transitoria. Los motores de D.C. han cubierto estos requerimientos satisfactoriamente en muchas aplicaciones, pero el conmutador mecánico es frecuentemente indeseable porque se requiere un mantenimiento regular. Lo anterior provoca dificultades cuando no puede ser realizada una interrupción de servicios o cuando el motor es utilizado en lugares inaccesibles.
Las cualidades de un motor de C.A. lo hacen robusto y evitan el mantenimiento a altas velocidades. L a construcción simple del rotor también conduce a un motor barato y una relación peso/potencia alta. Desafortunadamente los motores de inducción son inflexibles en su velocidad cuando operan a una frecuencia constante estándar de alimentación de C.A. El motor de inducción gira ligeramente abajo de la velocidad síncrona.
Sólo es posible obtener un control de velocidad eficiente en un amplio rango cuando la frecuencia de alimentación es variable. Consecuentemente se puede contar con controladores de velocidad mediante el empleo de métodos de frecuencia variable.
El problema para seleccionar un controlador de velocidad para una aplicación particular es escoger el sistema adecuado que pueda ser económico y que otorgue un rango de control de velocidad con la precisión requerida y la respuesta de velocidad Los controladores de estado sólido cumplen estas características, un control completo y robusto no resulta caro en comparación con la utilización o las ventajas que presenta, sin embargo esto depende aún de la aplicación.
En muchas aplicaciones los motores funcionan directamente conectados a la red, de acuerdo con su propia característica par motor-velocidad y en condiciones de funcionamiento determinadas por la carga mecánica.
En muchos otros casos, los motores tienen equipos de control los cuales pueden ajustar sus características y variar sus condiciones de funcionamiento, de modo que atiendan los requisitos particulares de la carga mecánica.
En determinadas condiciones no hace falta una variación continua de velocidad, siendo suficiente una variación discreta. Se puede controlar cada tipo de motor de forma que pueda proveer un ajuste continuo de velocidad de estado sólido, tales como diodos, Circuitos Integrados (CIS), tiristores y transistores.
La combinación del motor y del equipo de control se llama sistema de accionamiento. El coste de este sistema depende, por lo tanto, del tipo de motor utilizado y del equipo necesario para obtener el control.
Los motores de corriente continua son controlados con más facilidad y han dominado el campo de accionamiento de velocidad variable.
Los motores de corriente alterna, aunque sean más baratos y robustos que los motores de corriente continua, poseen equipo de control más caros. Mientras tanto, se prevé un crecimiento más acentuado de los accionamientos de velocidad que utilizan los motores de CA debido a las siguientes razones:
0 Los precios de los componentes de estado sólido tienden a disminuir.
o Muchas aplicaciones restringen el uso de máquinas de corriente continua debido a la humedad y la temperatura del ambiente; el impedimento del uso de colectores y escobillas debido a la presencia de ambientes agresivos o peligrosos; o las limitaciones en la velocidad periférica del colector.
0 En un sistema de accionamiento con varios motores, los precios más baratos de los motores de CA pueden volver el sistema competitivo en relación al accionamiento por motores de corriente continua.
o Los motores de CA, y en particular los de inducción, son más robustos, de mantenimiento más sencillo y de dimensiones más pequeñas que los correspondientes motores de CC.
El hecho de que la velocidad síncrona de los motores de inducción esté dada por:
donde:
ns es la velocidad angular síncrona en rps. f es la frecuencia de la alimentación en Hz. P es el número de pares de polos.
sugiere la posibilidad de obtener varias velocidades para un mismo motor, variando la frecuencia o el número de pares de polos. Con la variación de la frecuencia, se obtiene una variación continua de la velocidad, mientras que la variación del número de polos es obviamente discreta.
Existen varios métodos para obtener un control continuo de la velocidad del motor, estos métodos son:
Una forma de conseguir variar la velocidad de estos motores es a través de la alimentación por una fuente de frecuencia variable. Este tipo de control es eficaz y, con motores síncronos puede ser muy preciso.
Un dispositivo de control capaz de generar potencia con frecuencia ajustable, en general consiste en:
I. Un rectificador tiristorizado sencillo o doble. o un rectificador de diodos.
11. Una reactancia de conexión (filtro) y posiblemente una batería de condensadores.
111. Un inversor capaz de poveer cargas con factor de potencia inductivo, en el caso de motores de inducción.
L a figura 3.1 presenta tres principios diferentes de sistema de ajuste de frecuencia, usados en motores jaula de ardilla.
Control de Motor Filtro Inversor corriente
Principio de la tkente de corriente.
Principio de la filente de tensión
r Rectificador Modulador de la Inversor Motor Filtro
anchura del impulso
Principio de la fiente de tensión/modulador de la anchura del impulso
Figura 3.1. Principios de sistemas de ajuste de frecuencia utilizados en motores de jaula de ardilla.
En un motor de inducción, la siguiente relación es válida.
$ = U / k N f . donde:
4 es el flujo por polo. U es la tensión de alimentación. N es el número de espiras, sometidas a la tensión U. f es la frecuencia de alimentación. k es una constante de la máquina.
En el caso de que 4 se mantenga constante, el par motor se mantendrá también. Esto se consigue variando conjuntamente U y f. L a figura 3.2 muestra la curva par-velocidad para un motor asíncrono con control de fiecuencia a flujo constante.
C
Figura 3.2. Curva par-velocidad para motor asíncrono con control de frecuencia a flujo constante
Se puede observar que toda la curva par-velocidad se mueve a lo largo de eje de velocidades sin alterar su forma. L a condición para ello es que la relación entre la tensión y la frecuencia se mantenga constante (flujo constante). El par máximo permanece aproximadamente constante.
Un motor de inducción usado de esta manera tiene características semejantes a las de un motor de corriente continua de excitación independiente, con el flujo constante y la tensión de inducido variable. Con frecuencia muy bajas la relación tensión frecuencia debe aumentarse un poco para adaptar la tensión al componente desproporcional resistivo de la impedancia del motor.
En este método, la frecuencia permanece constante, y la variación de la velocidad se obtiene por la variación del deslizamiento.
S = (n, - n ) / n , = 1 - ( n / n,)
donde:
n, es la velocidad síncrona del campo giratorio. n es la velocidad del motor. S es el deslizamiento.
Este tipo de control de velocidad se basa en el hecho de que el par de un motor de inducción es aproximadamente proporcional al cuadrado de la tensión aplicada.
Si la carga tiene una curva del par resistente como se muestra en la figura 3.3, la reducción de la tensión a la mitad de su valor lleva la velocidad de nl a n2.
T
Carga
I nz nl ns
Figura 3.3. Variación de velocidad por ajuste de la tensión de alimentación.
L a potencia del campo giratorio de un motor de inducción es
Pg = C. 27c n,
y las pérdidas en el rotor ( potencia disipada en el rotor ).
p 2 = s . P g ó p2 = S C. 2rc n,
Por lo tanto es obvio que la regulación de velocidad inferior a la velocidad nominal significa pérdidas considerables.
La ecuación muestra también que las pérdidas son independientes de la resistencia del rotor. Por consiguiente es ventajoso escoger l a mayor resistencia posible del rotor para mantener la corriente limitada.
Por lo tanto, se puede concluir que este principio es válido sólo en las aplicaciones con el régimen intermitente, o cuando el par resistente de la carga disminuye acentuadamente con la velocidad ( como en el caso de accionamientos de bombas o ventiladores ).
Para entender el proceso a controlar debemos entender dos conceptos, el efecto refrigerante y la capacidad del sistema.
Como sabemos el efecto refrigerante es la cantidad de calor que cada unidad de masa de refrigerante absorbe del espacio refrigerado y la capacidad de cualquier sistema de refrigeración es la velocidad a la cual se puede efectuar la eliminación de calor del espacio refrigerado.
L a capacidad de un sistema de refrigeración mecánica depende de dos factores:
l . L a masa de refrigerante que fluye en la unidad de tiempo y, 2. El efecto refi-igerante por unidad de masa que circula.
Expresado como ecuación se obtiene:
Qe= m qe
donde:
Qe es la capacidad de refrigeración en unidades de potencia. m es la masa de refrigerante en circulación por unidad de tiempo. qe es el efecto refrigerante en unidades de energía por unidad de masa.
Dado que el efecto refrigerante depende del fluido refrigerante y de las temperaturas de vaporización y condensante, podemos decir que si manipulamos la cantidad de masa de refrigerante circulado por unidad de tiempo cambiaremos la capacidad de refrigeración del sistema.
Como la cantidad de calor que se necesita retirar dentro del espacio refrigerado depende de los hábitos del usuario, tenemos variaciones a lo largo del día en toda una gran gama de combinaciones. Si nuestro compresor en la unidad de refrigeración trabaja de forma constante e independiente de las variaciones en la carga térmica con un control mecánico- eléctrico de temperatura, lo que tendremos como resultado es un sistema que prende y apaga intermitentemente en diferentes lapsos de tiempo, siempre trabajando a la misma velocidad de recirculación. Si controlamos la cantidad de calor retirado por unidad de tiempo podemos administrar el rendimiento de la energía utilizada en mover el compresor, además de obtener el objetivo de mantener las condiciones de temperatura requeridas en el espacio refrigerado.
Para realizar lo anterior colocamos un servomecanismo que controle la velocidad del motor eléctrico que a su vez acciona el compresor colocado en la unidad herméticamente sellada y que responda a las necesidades del mismo sistema, es decir, cuando el gradiente de temperatura es muy grande, la cantidad de calor que debe ser retirado se efectúa haciendo funcionar el motor a su velocidad nominal, con lo cual la cantidad de refrigerante que circula por el sistema será la mayor posible por unidad de tiempo. Cuando el gradiente de temperatura es pequeño, el motor trabaja a una fracción de su velocidad nominal con lo cual la cantidad de refrigerante recirculado en el sistema será menor, el tiempo en el que se retira el calor de la carga térmica será mayor pero la potencia consumida de la línea también disminuirá, con un ahorro consecuente.
El ahorro generado no es tan sustancial como en las grandes unidades de refrigeración, sin embargo como hemos mencionado anteriormente la cantidad de pequeñas unidades de refrigeración domésticas y comerciales que operan con un pequeño ahorro, producirán en su conjunto un gran ahorro y justificaran el empleo de este tipo de mecanismos en estos sistemas.
La forma en que se sensa la temperatura y se retroalimenta la información hacia el control de velocidad del motor se realiza por termopares que de cierta manera además de registrar la información del gradiente de temperatura también pueden ajustar la distribución de l a carga térmica dentro del espacio refrigerado.
Diseño (le1 controlrrlor.
Para su explicación hemos dividido el circuito en tres etapas:
1. La etapa de potencia, que es la encargada de accionar el motor de inducción.
2. La etapa de control, que determina la velocidad y los tiempos de arranque y paro de acuerdo a la información recibida, y
3. La etapa de sensado, que es la que proporciona los datos de temperatura.
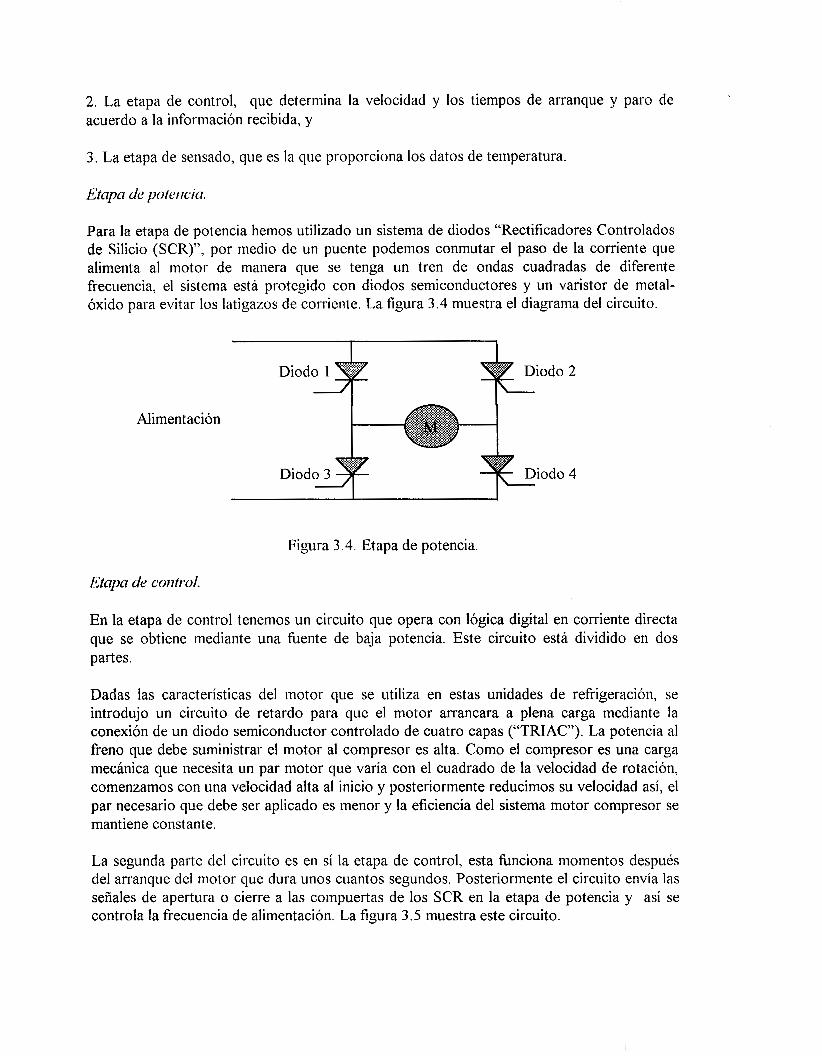
Etapa de poterrcia.
Para la etapa de potencia hemos utilizado un sistema de diodos “Rectificadores Controlados de Silicio (SCR)”, por medio de un puente podemos conmutar el paso de la corriente que alimenta al motor de manera que se tenga un tren de ondas cuadradas de diferente frecuencia, el sistema está protegido con diodos semiconductores y un varistor de metal- óxido para evitar los latigazos de corriente. La figura 3.4 muestra el diagrama del circuito.
En la etapa de control tenemos un circuito que opera con lógica digital en corriente directa que se obtiene mediante una fbente de baja potencia. Este circuito está dividido en dos partes.
Dadas las características del motor que se utiliza en estas unidades de refrigeración, se introdujo un circuito de retardo para que el motor arrancara a plena carga mediante la conexión de un diodo semiconductor controlado de cuatro capas (“TRIAC”). La potencia al freno que debe suministrar el motor al compresor es alta. Como el compresor es una carga mecánica que necesita un par motor que varía con el cuadrado de la velocidad de rotación, comenzamos con una velocidad alta al inicio y posteriormente reducimos su velocidad así, el par necesario que debe ser aplicado es menor y la eficiencia del sistema motor compresor se mantiene constante.
La segunda parte del circuito es en sí la etapa de control, esta funciona momentos después del arranque del motor que dura unos cuantos segundos. Posteriormente el circuito envia las señales de apertura o cierre a las compuertas de los SCR en la etapa de potencia y así se controla la frecuencia de alimentación. L a figura 3.5 muestra este circuito.
Señal del circuito sensor - de temperatura
I EtaDa de rectificación m la alimentación del I - 1 circuito digital I
I I I I
I Etapa de control I I+vccI
e
Señal de control de frecuencia.
Circuito de retardo para el arranque del motor, y duración del
tiempo de encendido. -
Pulso de 1_ disparo de - - l0seg.
O
- Circuito
generador de
cuadrados. pulsos
- -
I+vccl Tren de
cuadrados. S Salida hacia la etapa de potencia. pulsos
I Circuito de control de
Compuerta del diodo 1
apertura y Compuerta del diodo 2 cierre de
compuertas Compuerta del dido 3
para el circuito I
de potencia. Compuerta del dido 4
Figura 3.5 Diagrama esquemático del circuito de control
Para accionar el circuito de control de frecuencia se necesita una señal de voltaje que varía entre 2 y 4 Volts, con lo que obtenemos una salida de entre 30 y 60 Hz, la razón de reducir la velocidad del motor solamente hasta la mitad es poder mantener la eficiencia del motor y del compresor cerca del 80%. Si se utilizaran velocidades menores entonces la eficiencia caería rápidamente consumiendo así mayor energía eléctrica para el mismo trabajo entregado.
La figura 3.6. muestra un diagrama esquemático del circuito utilizado.
Termopar colocado dentro
Entrada de la línea de I I
del espacio refrigerado
alimentación
Salida de voltaje y
controlada hacia
- Señal de
Circuito disparo frecuencia
Circuito adaptador de
voltaje
controlador de velocidad
el motor.
del motor. Selial de control
Temperatura dc re€erencia
Figura 3.6. Diagrama del circuito de sensado de temperatura.
El circuito de sensado compara la temperatura de referencia con la temperatura en el interior del espacio refi-igerado, si la diferencia de temperaturas es mayor que el intervalo permitido, entonces se envía una señal de disparo al circuito de control. Además se envía otra señal que marca el cambio en el gradiente de temperatura, cuando la diferencia es máxima, el control deberá generar una frecuencia de control de 60 Hz, y esta se irá disminuyendo en tanto la diferencia de temperaturas se reduzca colocándose en un mínimo de 30 Hz y se continuará así hasta alcanzar la temperatura de referencia.
Capítulo 4.
Adaptación del dispositivo retroalimentado.
Antes de describir como se encuentra adaptado este dispositivo a la unidad de refrigeración es necesario conocer de manera representativa como hnciona individualmente cada uno de los módulos de los que se encuentra integrado. Este dispositivo está dividido modularmente en tres etapas las cuales se encuentran interconectadas y la respuesta de cada etapa está sujeta a las señales que se obtienen de la anterior. Si por alguna razón se interrumpiese la conexión entre cualquiera de los módulos el funcionamiento general del dispositivo de control se vería afectado. La primera de las etapas se encarga de convertir una señal fisica analógica que es la temperatura, en una señal eléctrica también analógica, la variación de voltaje a la salida del circuito es entonces proporcional a la temperatura dentro del espacio refrigerado. La siguiente etapa transforma la señal eléctrica de variación de voltaje a una señal eléctrica de baja potencia con forma de onda cuadrada con frecuencia variable, así, la frecuencia obtenida a la salida de esta etapa será proporcional al voltaje aplicado en la entrada, que a su vez es proporcional a la temperatura dentro del espacio refrigerado. En la última etapa, l a señal cuadrada se divide y posteriormente se aplica a las compuertas de los tiristores que solamente hacen la hnción de aplicar la potencia eléctrica suficiente requerida para accionar el motor eléctrico, de tal forma que se tiene una transducción de la señal eléctrica de frecuencia variable a un movimiento giratorio que finalmente impulsará al compresor con velocidad variable.
Generalmente en los refrigeradores que se hallan en el mercado, una vez que se tiene una diferencia apreciable entre la temperatura de referencia y la temperatura en el espacio refrigerado se produce una señal eléctrica en el termostato, el cual a su vez pone en marcha el motor que acciona el compresor. El compresor al estar sujeto a una velocidad de giro contante proporciona un flujo constante de compresión de refrigerante que circula por el sistema. Así en determinado tiempo se alcanzaba la temperatura deseada y el compresor se desconectaba. Con el dispositivo diseñado en este trabajo se puede controlar el trabajo del compresor ( y el flujo de refrigerante ) mediante la regulación de la velocidad del motor, este es el punto que representa el ahorro de energía del modelo propuesto.
A continuación se explica el hncionamiento eléctrico de este dispositivo y como se adapta a la unidad de refrigeración.
Respuesto del circuito.
Los motores de inducción funcionan normalmente con una señal de corriente alterna de frecuencia constante cuando se conectan a la línea. El requisito que debe de cumplir entonces el circuito de potencia es suministrar al motor una señal de alimentación alternante con el voltaje y la corriente necesarios para su buen hncionamiento. En este caso se toma la señal de alimentación, se rectifica y posteriormente se le hace variar a través del motor a la frecuencia que se requiere, que puede ser la frecuencia normal de la línea de 60 Hz o menor,
recordando que debajo del 50% de la frecuencia de alimentación nominal, el motor comenzará a ser ineficiente.
El circuito de potencia utiliza un rectificador de onda completa con filtros para obtener una componente de voltaje que será manipulada mediante el circuito de control para reproducir una onda cuadrada alternante, de tal forma que el motor responderá aproximadamente de la misma forma que si aplicamos una onda senoidal de frecuencia variable.
La figura 4.1 muestra las señales de voltaje obtenidas a la entrada y a la salida de dicho rectificador. No es necesaria una rectificación muy estricta debido a que el motor de inducción puede hncionar perfectamente con una etapa sencilla de rectificado sin alterar su eficiencia. Si se aplicara una rectificación mayor sólo se aumentarían los costos y no se tendría una mejora significativa en el comportamiento del motor, además, dado que se tiene una conexión mecánica con el compresor y este muestra un par resistente como todas las cargas mecánicas, finalmente el movimiento del compresor sería insensible a tan pequeñas variaciones.
J rt
a) Voltaje de entrada. b) Voltaje rectificado.
c) Voltaje después del banco de capacitores.
Figura 4. l . Respuesta de la etapa de rectificación.
L a figura 4.2.a. señala la onda de salida del circuito de potencia que será aplicada posteriormente al motor. Esta forma de onda se obtiene cuando el voltaje ya rectificado, que es solamente positivo, se hace pasar primero en un sentido sobre los devanados del motor de inducción utilizando un pulso alto en las compuertas de los diodos SCR 1 y 4 ( mostrados en la figura 3.4 ). Posteriormente el pulso alto se aplica a las compuertas de los diodos SCR 2 y 3 con lo cual se invierte el flujo de corriente sobre los mismos devanados. Finalmente para el motor' esto seria equivalente a tener una onda alternante con picos positivos y negativos de la misma amplitud. L a rapidez con que se obtiene la conmutación determina la frecuencia requerida para ajustar la velocidad del motor eléctrico.
Como el motor en el arranque demanda un pico de corriente, se permite que este sea suministrado por la linea para evitar posibles daños al equipo de control, después que el motor se encuentra en marcha hay una conmutación entre la alimentación de la línea y la alimentación a través del circuito. La figura 4.2.b representa el punto en donde se efectúa la conmutación entre el circuito de arranque y el circuito de control de frecuencia, posteriormente a la conexión del circuito de control, se tiene una reducción en la frecuencia que tiene la misma forma de onda. Esta figura es ilustrativa, dado que este evento solamente ocurre en una ocasión, esto no puede ser observado en un osciloscópio pues este aparato sólo puede mostrar señales de frecuencia constante, es decir, que se repiten periódicamente. Sin embargo se asegura que la conmutación ocurra en este punto con un circuito de "cruce por cero" que monitorea y garantiza que ocurra de esta manera. Si no se tuviera este control, podría ocurrir una alteración en el movimiento del motor al momento de la conmutación, y si se repitiera periódicamente cada que entra en hncionamiento, el motor podría resultar dañado.
a) Voltaje de salida del puente de de diodos SCR.
b) Conmutación entre el circuito de control y la línea
Figura 4.2 Respuesta del circuito de potencia.
La frecuencia de salida es controlada por la apertura o cierre de las compuertas de los diodos SCR. Cuando se genera el impulso de encendido. en el circuito de sensado de temperatura, el circuito de arranque genera un sólo pulso cuadrado de una duración de aproximadamente 10 segundos ( tiempo durante el cual ocurre la conexión del motor a la línea y transcurre el estado transitorio de conexión ), este pulso se aplica a la compuerta del TRIAC que permite el flujo de la corriente directamente desde la línea de alimentación, mientras que por otro lado las compuestas de los diodos SCR permanecen cerradas, esto es, el circuito de control permanece fuera de funcionamiento. Una vez que transcurrió el tiempo de duración de este pulso, cambia de estado y bloquea la conexión a la línea (“apagando” el TRTAC), en ese mismo instante se genera un tren de pulsos cuadrados de 60 Hz. Este tren de pulsos está formado por dos estados, uno alto y el otro bajo, cuando se tiene un cambio de estado bajo a estado alto se habla de una “ subida” del pulso, y cuando se tiene un cambio del estado alto al estado bajo se habla de una “bajada” del pulso, esto se repite continuamente para formar el tren de pulsos.
La subida de un pulso habilitará el diodo 1 y el diodo 4 con lo que habrá un flujo de corriente en una dirección sobre los devanados del motor. Mientras dure el pulso en estado alto, se mantendrá esta situación. Cuando se detecte la bajada del pulso, es decir el cambio entre un voltaje alto y un voltaje bajo o nulo, el diodo 1 y el diodo 4 se verán interrumpidos y entrarán en estado de conducción los diodos 2 y 3 mediante un pulso en cada compuerta con lo que se obtendrá que el flujo de corriente en los devanados del motor circule en sentido contrario. Mientras el pulso se encuentre en estado bajo se mantendrán conectados estos diodos. Cuando se llega al siguiente pulso dentro del tren de pulsos la situación se repite.
En el mercado existen puentes de diodos comerciales construidos como un sólo dispositivo que manejan corrientes relativamente pequeñas y son utilizados para controlar motores con potencias entre 3 y 6 Hp, sin embargo, para los motores que propulsan los compresores de las unidades de refrigeración pequeñas como las de los establecimientos comerciales y domésticas cuya potencia fluctúa entre 1/3 Hp y 1 Hp, este tipo de circuito no es adecuado. El costo de este pequeño dispositivo se encuentra entre los $650.00 y $900.00 y si tomamos en cuenta que además se debe de conseguir el circuito de control para este dispositivo el costo hace prohibitivo este recurso de ahorro energético.
El construir un equipo de control con dispositivos discretos ( lo cual significa que se utiliza componente por componente ) provoca retardos de tiempo en el hncionamiento general del controlador; pero estos tiempos suelen ser del orden de unos cuantos nanosegundos, con lo que la respuesta de este tipo de circuitos que son mucho más económicos es bastante aceptable dado que no ocasiona problemas en el hncionamiento de un motor de c.a. Una vez que se tiene todo el circuito en funcionamiento, algunas secciones de éste se pueden integrar para fabricarse en serie con lo que el costo de producción se reduce.
Una vez que se conoce el hncionamiento de la etapa de potencia y como es que se acopla al motor, debemos saber como se generan las señales de control a partir de la variable conocida que es la temperatura en el espacio refrigerado.
L a figura 4.4 señala en cada sección la forma de onda que se obtiene a la salida del circuito del cual se trate, en la parte superior está el diagrama del circuito que alimenta la etapa de control. La entrada del circuito es una derivación de la alimentación, por lo que su forma de onda es senoidal de frecuencia constante, posteriormente hay un circuito de rectificado que proporcionará un voltaje constante (+Vcc) de 5 volts, que es el voltaje que requieren estos circuitos integrados. En el dibujo de abajo se muestra la etapa de control y las señales que se tienen en las conexiones internas de las diferentes secciones.
L a última parte en la cuál tenemos la sincronización de la señal que se aplica a cada una de las compuertas de los diodos SCR se describe de manera más detallada en la figura 4.3. Cuando en una compuerta se aplica un pulso alto, el diodo SCR impide el paso de la corriente, es decir, no conduce. Por el contrario cuando el pulso es bajo en la compuerta, el diodo SCR se cierra ocasionando la conducción sólo en el sentido que polariza directamente al diodo. Los diodos 2 y 3 están defasados con respecto a los diodos 1 y 4 por 180 grados eléctricos.
Arranquc dcl motor Tren de pulsos generado dcspués del arranque del motor
“Ii b
a) Scllal de salida del circuito de control de frecuencia. t
b) Scfial de control de las compuertas de los diodos 1 y 4 t
c) Sefial de control de las compuertas de los diodos 2 y 3 t
Figura 4.3 Sincronización de las compuertas de los diodos SCR.
Etapa de rectificación para la alimentación del circuito digital
I I I
I EtaDa de control 1
m Señal de
Señal del control de circuito sensor frecuencia. I de temperatura
t
Circuito de retardo para el arranque del motor, y duración del
tiempo de encendido.
bc I I Pulso de t
_L - disparo de - 10seg.
r t
Tren de
cuadrados. pulsos
Salida hacia la etapa de potencia.
Circuito generador de
cuadrados.
Circuito de control de apertura y cierre de
comwertas Compuerta del diodo 3 I pulsos
para el circuito I
de potencia. 1-1
Figura 4.4 Formas de onda de los circuitos de control.
Descripcicin cle1 ensamble.
El circuito de control de frecuencia se conecta fuera de la unidad motor-compresor hermética. Esto representa una ventaja significativa dado que cualquier unidad de refrigeración que se encuentre actualmente en hncionamiento puede ser modificada con este dispositivo. L a modificación podría ser inmediata dado que este circuito responde a una señal eléctrica proveniente de un termopar instalado en lugar del termostato normal y el selector de la temperatura de referencia también tendría que ser colocado.
El circuito de arranque funciona de manera normal cuando se necesita, por lo tanto hnciona como si no existiese el circuito de control de frecuencia. Posteriormente comienza el hncionamiento del controlador de frecuencia reduciendo la velocidad del motor y por tanto reduciendo el flujo másico de refrigerante.
La fuente de alimentación del circuito digital se encuentra instalada junto con el circuito de control formando una unidad independiente que puede ser removida en cualquier momento, lo cual facilitaría su compostura o sustitución en caso de que ocurriera alguna falla.
El termopar que sensa la temperatura en el espacio refrigerado se encuentra distante de la unidad de control ya que la unidad de control también está unida físicamente con el circuito que acopla eléctricamente el termopar con el controlador. En la misma sección en la que se encuentra situado el termopar se coloca también el selector de la temperatura de referencia.
Funcionamiento.
Una de las desventajas de trabajar con circuitos que manejan lógica digital es que al funcionar en lugares de trabajo sometidos a campos electromagnéticos, éstos podrían causar interferencia en su desempeño ocasionando que fallen. Aún cuando el circuito que utilizamos está ubicado cerca de la unidad de accionamiento, no se tiene éste problema porque está colocado dentro de una caja metálica que forma una jaula de Faraday, la cual elimina toda interferencia causada por los devanados del motor al estar en hncionamiento.
Para hacer el análisis de funcionamiento es necesario conocer como es la secuencia de los eventos en las diferentes secciones como son la parte digital de control, la unidad de potencia y la de sensado de la temperatura hncionando de manera conjunta. Esta secuencia de hncionamiento se describe a continuación.
Como sabemos, cuando la temperatura dentro del espacio refrigerado aumenta hasta llegar a salir del rango permitido de diferencia con la temperatura de referencia, se produce un pulso que encenderá el motor mediante el circuito de control, además, se genera una señal analógica de voltaje, ésta señal varía entre 2 y 4 volts, inicialmente al encender el motor la diferencia de temperaturas es máxima y el voltaje será el mayor, o sea, 4 volts. A medida que el espacio refrigerado reduce su temperatura, el circuito de sensado de temperatura producirá un voltaje menor que provocará que se reduzca la velocidad del motor. Cuando se
llega a la temperatura de referencia, el pulso de disparo cambiará de estado y el motor cesará su operación. Por otro lado en el circuito de control cuando se recibe el pulso de encendido se genera dos pulsos, uno alto y otro bajo, el pulso alto activará la compuerta de un tiristor el cual conectará la alimentación de la línea directamente al motor y el pulso bajo entrará a una serie de compuertas digitales que tendrán como efecto apagar las compuertas de los diodos SCR. Una vez que transcurre el tiempo determinado por el generador del pulso de retardo, se desconecta el tiristor y se conectan los diodos SCR. L a retroalimentación del circuito se realiza entonces cuando la temperatura del espacio refrigerado ha llegado a la temperatura de referencia. El diagrama de flujo de la figura 4.5. ilustra de manera esquemática como se efectúa la transferencia de información.
Hasta donde se ha tenido oportunidad de probar el circuito de control, este hnciona correctamente, no se tienen pérdidas dada la sustitución de la alimentación original de la línea por la alimentación vía el controlador de frecuencia.
El circuito cuenta con una capacidad de respuesta a la temperatura muy rápida debido a la velocidad de respuesta del termopar, actualmente se tiene un bulbo que sensa la temperatura. Esto puede representar una desventaja ya que si algún objeto caliente ( o a mayor temperatura de la que se encuentra el espacio refrigerado ) se coloca muy cerca del termopar tendría como consecuencia un rápido encendido de la unidad motor-compresor aún cuando la carga térmica hera pequeña y en realidad no debería de encenderse el motor. Este efecto sucede tanto en esta unidad de refrigeración como en otras que cuentan con su termostáto anterior, sin embargo este efecto se ve acrecentado por la presencia de un elemento que no presenta tanta inercia térmica.
El nuevo circuito adaptado consume una potencia adicional de aproximadamente 2.5 Watts, lo cual no afecta el posible consumo de energía del motor que es de ?4 Hp ( 373 Watts ). Además es muy robusto dado que no es apreciablemente sensible a la temperatura del medio ni a los campos electromágneticos del motor. Estas dos variables son normalmente de importancia en el funcionamiento de los circuitos eléctrónicos. Presenta como ventaja adicional su rápida respuesta al cambio de temperatura, lo cual quiere decir que el motor trabajará solamente lo necesario para mantener la temperatura del espacio refrigerado como realmente se requiere.
El ahorro total aún no se ha evaluado ya que se necesita tener al menos dos unidades de refrigeración funcionando en iguales circunstancias o tener en hncionamiento una unidad con el equipo adaptado durante un tiempo considerable y posteriormente probarlo sin éste equipo para poder obtener la comparación.
Además sería muy bueno poder contar con diferentes unidades de refrigeración con diferentes características y tamaños donde probarlo para poder comparar el ahorro obtenido en cada aparato. Hasta ahora esto no ha sido posible.
Adecuación y convcrsión dc In scfial
analógica nxís l a emisión dcl pr~lso dc
cncctldido.
Gcncración del pulso de retardo y
posleriormente concsión con el
circuito de control de
Dcsconesi6n de la línca y conmutación con el controlador de
frecuencia.
Etapa de potencia que conectarh al motor de rorm indirecta a la
alimentación. 3
Figura 4.5. Diagrama de flujo que representa el füncionamiento del equipo.
Observaciones y conclusiones
En el capítulo 2 se mencionó la posibilidad de ahorro energético cuando se mostró que el trabajo del compresor es proporcional por un lado al flujo másico de refrigerante circulado y por otro lado el trabajo realizado por el motor eléctrico disminuye como una fbnción cuadrática cuando la velocidad de giro del compresor disminuye. En pocas palabras podríamos decir que el consumo de energía eléctrica disminuye a medida que el flujo de refrigerante disminuye. Si bien es cierto que el calor retirado de la carga térmica dentro del espacio refrigerado tardará más tiempo en retirarse trayendo como consecuencia que el motor funcione por más tiempo, el gasto energético es aún así menor. Para afirmar esto se toma en cuenta lo siguiente: si consideramos que la velocidad del motor se reduce al 50 YO, el flujo de refrigerante también se reduce en un 50 % y por lo tanto el tiempo en el que se alcanzar& la temperatura deseada aumenta, supongamos que al doble, sin embargo, el consumo de electricidad requerida para accionar la carga mecánica, que es el compresor, girando a la mitad de la velocidad angular se disminuiría en una proporción mucho mayor al 50%, lo cual representaría un ahorro substancial.
L a Procuraduría Federal del Consumidor reporta cuales son los refrigeradores comerciales más económicos, con mejores características y con menor consumo de energía eléctrica (este valor de consumo de energía máximo anual está señalado en la etiqueta y es aprobado por la Comisión Nacional de Ahorro de Energía). Tomando como ejemplo uno de los aparatos de capacidad comúnmente usada para usos domésticos y comerciales de entre 282 y 339.6 decímetros cúbicos, con deshielo automático ( es decir, no hacen escarcha ), el consumo de energía máximo anual para un refrigerador marca Daewoo ( que es el que tiene el menor consumo ) es de 562.1 kWh/año. Si nosotros obtuviéramos un ahorro mínimo de un 1% en este aparato, entonces el ahorro sería de 5.621 kWh/año. Suponiendo que a nivel nacional se utilizan solamente este tipo de refrigeradores, que son los mas ahorradores, estarían funcionando 20 millones de unidades, así, el ahorro generado sería potencialmente de 1 1.242 GWldaiío.
Aún cuando las cantidades pueden variar dependiendo de que tipo de compresor o motor se utilice o las marcas de los fabricantes, en general sucede la situación descrita. Este enfoque teórico file la motivación para el desarrollo de este proyecto. También se mencionó que no se puede reducir la velocidad del motor ni del compresor a menos del 50% ya que las pérdidas por eficiencias en ambos se incrementarían grandemente con lo cual el sistema provocaría mayor consumo de energía eléctrica.
El equipo de ahorro de energía no ha sido probado completamente hasta donde se terminó esta investigación, sin embargo el ahorro aunque pequeño es evidente ya que el trabajo efectuado por el compresor disminuye al poder controlar el flujo másico de refrigerante circulado.
Existen diferentes puntos que pueden aumentar significativamente la eficiencia de este equipo proyectado. Uno de ellos depende de la forma en como se distribuye la carga térmica dentro del espacio refrigerado. No se puede hacer nada en el aspecto de como acomodarla
dentro del espacio; pero si podemos buscar una forma para sensarla y saber como se encuentra distribuida. De esta forma, conociendo en varios puntos del espacio refrigerado la distribución de la carga térmica mediante una red o matriz de termopares ( u otros dispositivos sensibles a la temperatura como por ejemplo circuitos integrados que proporcionan una salida eléctrica digital con mayor compatibilidad con el circuito de control de frecuencia ) se podría tener una mejor decisión de cuál podría ser el flujo necesario para tener el menor requerimiento energético.
Por otro lado, la respuesta del circuito que controla el flujo de refrigerante varía linealmente con el gradiente de temperatura, es decir que cuando nos acercamos más a la temperatura de referencia estamos trabajando casi al 50% del flujo másico de refrigerante. Pensando en lo anterior quizá exista alguna mejor relación tomando en cuenta las propiedades termodinámicas del refrigerante utilizado que no sea precisamente lineal para controlar el flujo de refrigerante. Esta investigación podría servir no sólo para unidades de refrigeración doméstica sino para equipos de refrigeración mucho más grandes.
Una de las desventajas que presenta el presente proyecto es el control más estricto de las componentes reactivas de la potencia. Aquí se utiliza una reactancia capacitiva constante, la cual está calculada para una frecuencia de 60 Hz. tomando en cuenta una forma de onda senoidal. Realmente casi todo el tiempo en que está hncionando el motor que acciona el compresor se encuentra sometido a una alimentación cuya forma de onda es cuadrada y cuya frecuencia está variando en el tiempo, lo cual indica que el valor de la capacitancia utilizada debe de variar de manera proporcional a la inductancia generada en los devanados del motor.
Como mencionamos en el capítulo 4, existen en el mercado algunos dispositivos que pueden ser utilizados para construir un controlador más robusto aún cuando éste sea más caro. Uno de los propósitos de éste proyecto h e tratar de obtener un ahorro energético en unidades de refrigeración domésticas sin incrementar su precio de venta, lo cual haría atractiva su compra dado que el precio sería casi el mismo o incluso podría no afectarse, dando además la ventaja de poder consumir menos energía eléctrica, que representaría un ahorro individual para el consumidor de éste producto y un ahorro nacional si su adopción h e m generalizada.
Como conclusión sería bueno mencionar que cualquier investigación o proyecto que conduzca a un ahorro energético generalizado tiene ventajas económicas y en nuestros días también ecológicas no sólo para el usuario final sino también a nivel nacional y a nivel mundial. El proyecto realizado está encaminado ha obtener un ahorro en equipos de refrigeración individualmente pero que por su gran utilización puede representar un gran ahorro en su conjunto.
El equipo construido en este proyecto puede no ser tan eficiente dada la naturaleza de los dispositivos utilizados en su elaboración, pero marca la pauta a seguir para obtener un ahorro de energía en equipos de refrigeración pequeños, los cuales se han mejorado actualmente en otros aspectos como son mejores aislantes, sistemas de distribución de frío
uniforme, intercambiadores de calor más eficientes, e incluso mejores unidades de compresión mecánica de vapor. Si a todas las ventajas que presentan actualmente los refrigeradores modernos le añadimos un poco de electrónica para poder manipular el control que regula la temperatura interna del espacio refrigerado de acuerdo con las condiciones climáticas ( con lo que se podría evitar el tener alimentos congelados cuando no se desean o que no se alcance la temperatura adecuada ) y un sistema que regule el flujo de refrigerante, podríamos estar construyendo aparatos de refrigeración que pudieran ser innovadores con grandes ventajas de ahorro.
Por último mencionamos que la respuesta del circuito de control a los cambios de temperatura es mayor y que en escasas situaciones esto podría representar una desventaja puesto que podría activar el circuito prematuramente cuando una pequeña carga térmica a temperatura mayor que la del espacio refrigerado se coloca muy cerca del sensor. Hemos pensado que una solución a este problema y otro más que siempre ha estado presente que es la distribución del frío dentro del espacio refrigerado podría atacarse colocando un arreglo de termopares, termistores o circuitos integrados sensibles a los cambios de temperatura conectados a una lógica digital que evaluara y decidiera conforme la situación global dentro de la unidad de refrigeración. este circuito no solamente podría activar el motor que acciona el compresor, sino que en su lugar podría activar un motor que impulsara el aire contenido dentro del espacio con el fin de distribuir el frío o accionar ambos mecanismos a la vez.
Si además se sensa la temperatura exterior podría adaptarse el circuito para que la temperatura de referenciaadentro del espacio refrigerado no &era controlada manualmente sino que respondiera a un patrón establecido, lo cual evitaría que a veces se tuvieran alimentos enfriados más de lo necesario o que no se alcanzan a refrigerar debidamente,
Bibliografía.
o Fundamentos de termodinámica técnica M. J. Moran, H. N. Shapiro. Editorial Reverté, S.A. 1994.
o Máquinas electromecánicas y electromagnéticas. Leander W. Matsch. Alfa Omega editores. 1990.
0 Power electronics: converters, applications, and design. Ned Mohan, Tore M. Undeland, William O. Robbins. Editorial John Wiley & sons. 1989.
o Dispositivos y sistemas para el ahorro de energía. Pere Esquerra Pizá. Marcombo boixareu editores. 1988.
0 Selección y aplicación de motores eléctricos Orlando S. Lobosco, José Luis P. C. Dias. Marcombo Boixareu Editores. 1989.
0 Principios de Refrigeración . Roy J. Dossat. Editorial CECSA 1988.
Ingeniería Termodinámica. M. David Burghardt. 1984.
Revista del consumidor. Procuraduría Federal del Consumidor Marzo de 1997.
Notas del curso de Máquinas eléctricas. Notas del curso de Máquinas térmicas. Notas del curso de Ingenieria energética 1. Notas del curso de Temas selectos de termodinámica 11.