Page 1
UNIVERSIDAD DE COLIMA
FACULTAD DE INGENIERIA MECANICA Y ELECTRICA
DISEÑO DE UN SISTEMA DE MONITOREO REMOTO DE LOSSIGNOS VITALES MEDIANTE UNA COMPUTADORA PERSONAL
TESIS PARA OBTENER EL GRADO DE MAESTRO ENCIENCIAS AREA COMPUTACION
J. ADAUCO VARGAS OCHOA
ASESORES
M.C. ANDRES GERARDO FUENTES COVARRUBIASDR. SERGIO ADRIAN MONTERO CRUZ
SEPTIEMBRE DE 1999, COQUIMATLAN, COLIMA
Page 2
Facultad de Ingeniería Mecánica y Eléctrica
EXPEDIENTE 258NUM. 96-0377
C. J. ADAUCO VARGAS OCHOABUGAMBILIAS No. 569COL. LAS AGUILASVILLA DE ALVAREZ. COL.
Informo a usted que ha sido aprobado como tema de titulación para obtenerel grado de MAESTRO EN CIENCIAS AREA: COMPUTACION.
El solicitado por usted bajo el título “DISEÑO DE UN SISTEMA DE MONITOREO REMOTO DELOS SIGNOS VITALES MEDIANTE UNA COMPUTADORA PERSONAL “.
Desarrollado bajo los siguientes puntos:
1 .- INTRODUCCIONII .- ANTECEDENTESIII .- OBJETIVOIV .- COMPUTADORA IBMV .- TARJETA DE ADQUISICIONVI .- ELECTROCARDIOGRAMAVII .- CONCLUSIONES
BIBLIOGRAFIAANEXOS
Al mismo tiempo informo a usted que han sido designados como asesoresde titulación a los C.C. M.C. ANDRES GERARDO FUENTES COVARRUBIAS y DR. SERGIOADRIAN MONTERO CRUZ.
En cada uno de los ejemplares de titulación que presente para examen,deberá aparecer en primer término copia del presente oficio.
;IBIAS
Page 3
Exp.No.: OO35Fecha: 16-10-99Acta No.: 10
C . J. ADAUCO VARGAS OCHOADomicilio: BUGAMBILIAS No. 569COL.: LAS AGUILASLocalidad: VILLA DE ALVAREZ, COL.Teléfono: (01331) 3-l l-65
En cumplimiento al artículo: 13 y 14 del reglamento de titulación, al artículo 40, Inciso A delreglamento de estudios de Posgrado vigente y al artículo: 46 de las normas complementarias al reglamento de Posgrado,correspondientes al Posgrado de la Facultad de Ingeniería Mecánica y Eléctrica. Informamos a usted que hasido autorizado por este Consejo Técnico del Posgrado su tema de Tesis para obtener el grado deMaestro en Ciencias Area: Computación titulado: “DISEÑO DE UN SISTEMA DE MONITOREO REMOTO DE LOSSIGNOS VITALES MEDIANTE UNA COMPUTADORA PERSONAL “.para ser desarrollado bajo los siguientes puntos:
1 .- INTRODUCCIONII .- ANTECEDENTESIII .- OBJETIVOIV .- COMPUTADORA IBMV .- TARJETA DE ADQUISICIONVI .- ELECTROCARDIOGRAMAVII .- CONCLUSIONES
BIBLIOGRAFIAANEXOS
Así mismo hacemos de su conocimiento que de acuerdo con la línea de investigación enla cual se enmarca su proyecto han sido autorizados como asesores de tesisa los C.C. M.C. ANDRES GERARDO FUENTES COVARRUBIAS y DR. SERGIO ADRIAN MONTERO CRUZ.
A partir de la fecha de aprobación tendrá como plazo un año para presentar su examen de grado, en casocontrario tendrá usted derecho a una prórroga única de seis meses so pena de perder el registro de su proyecto.
Una vez concluidos los trámites de revisión de su documento de tesis e integrado su expediente de titulacióndeberá recoger el oficio que acompañará a el visto bueno de su asesor de tesis, los cuales encabezarán cada uno de losejemplares de su tesis.
A t e n t a m e n t e
o de la Facultad de Ingeniería Mecánica
Page 4
H. CONSEJO TECNICO DEL POSGRADODE LA FACULTAD DE INGENIERIA MECANICA Y ELECTRICAP R E S E N T E .
Por medio de este conducto informo que el C.
J. ADAUCO VARGAS OCHOA
terminó su período de revisión de tesis:
“DISEÑO DE UN SISTEMA DE MONITOREO REMOTO DE LOS SIGNOS VITALESMEDIANTE UNA COMPUTADORA PERSONAL “
Cuyo contenido es el siguiente :
1 .- INTRODUCCIONII .- ANTECEDENTESIII .- OBJETIVOIV .- COMPUTADORA IBMV .- TARJETA DE ADQUISICIONVI .- ELECTROCARDIOGRAMAVII .- CONCLUSIONES
BIBLIOGRAFIAANEXOS
El cual cumple con los requisitos necesarios para su aprobación, por lo cual
lo autorizo para su impresión.
c.c.p. EXPEDIENTEAGFC/merv*
Page 5
H. CONSEJO TECNICO DEL POSGRADODE LA FACULTAD DE INGENIERIA MECANICA Y ELECTRICAP R E S E N T E .
Por medio de este conducto informo que el C.
J. ADAUCO VARGAS OCHOA
terminó su período de revisión de tesis:
“DISEÑO DE UN SISTEMA DE MONITOREO REMOTO DE LOS SIGNOS VITALESMEDIANTE UNA COMPUTADORA PERSONAL “
Cuyo contenido es el siguiente :
1 .- INTRODUCCIONII .- ANTECEDENTESIII .- OBJETIVOIV .- COMPUTADORA IBMV .- TARJETA DE ADQUISICIONVI .- ELECTROCARDIOGRAMAVII .- CONCLUSIONES
BIBLIOGRAFIAA N E X O S
El cual cumple con los requisitos necesarios para su aprobación, por lo cual
lo autorizo para su impresión.
A T E N T A M E N T ECoquimatlán, Col., 15 de Octubre de 1999
&2&.LL~ +-LzL. RGIO ADRIAN ONTERO CRUZ
ASESOR DE TESIS
c.c.p. EXPEDIENTESAMC/merv*
Page 6
A MI ESPOSA ANGELICA
Y MIS HIJOS
ALEJANDRO NOE
BRISEIDA NATALI
QUE SIN ELLOS NO SERIA EL QUE SOY
Page 7
1
INDICE
I INTRODUCCION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ..__..................2
II ANTECEDENTES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .._................................... . . . . . . . . . . . . . . . .5
III OBJETIVO . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
IV COMPUTADORA IBM ....................................................................................................... 74.1. - ESQUEMA DE ENTRADAS / SALIDAS (EIS) .................................................... 74.2. - TIPOS DE ARQUITECTURAS DE LOS CANALES DE E/S .............................. 94.3. - ARQUITECTURA DE CANAL ISA DE 8 BITS ................................................... el0
V TARJETA DE ADQUISICION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135.1. - CIRCUITO CONVERTIDOR DE SEÑALES ANALOGICAS A DIGITALES (A/D)..l35.2. - CIRCUITO DECODIFICADOR DE DIRECCIONES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145.3. - CIRCUITO D E REGISTROS EXTERNOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165.4. - CIRCUITO D E INTERRUPCIONES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195.5. - CIRCUITO SEPARADOR DEL BUS DEL SISTEMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
VI ELECTROCARDIOGRAMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
6.1.- INTRODUCCION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .._........._..._... 216.2. - AMPLIFICADOR DE ELECTROCARDIOGRAMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 286.3.- CALCULO D E COMPONENTES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 326.4.- CIRCUITO DE AISLAMIENTO ELECTRICO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 416.5.- PULSO DE CALIBRACION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 436.6.- FILTRO PASABANDA . . . . . . . . . . . . . . . . . .._.........................................._.............._......... 436.7.- CALCULO DEL FILTRO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 466.8.- ELEVADOR DE NIVEL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
VII CONCLUSIONES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
BIBLIOGRAFIA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
ANEXOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Page 8
2
I INTRODUCCION
A medida que pasa el tiempo el hombre ha tratado de simplificar todo lo
que le rodea de tal manera que los dispositivos, aparatos y mecanismos se
vuelven más sencillos de operar cada día.
Esto trae como consecuencia un ahorro enorme de tiempo, espacio,
costo, energía y un innumerable conjunto de factores que hacen que nos
inclinemos mas hacia la utilización de dichos sistemas por facilidad de trabajo.
Como hoy en día nosotros, empleamos las telecomunicaciones en las
actividades personales y de trabajo, asimismo, utilizamos el teléfono para tener
conversaciones a distancia y poco a poco estamos integrando una sociedad en
la cual la computadora personal y la transferencia de información juegan un
papel muy importante en el desarrollo humano.
En los últimos años, las computadoras personales han alcanzado una
gran aceptación en los laboratorios de investigación, hospitales, escuelas, etc.,
para la adquisición y procesamiento de datos, mediante un accesorio (tarjeta)
en alguna de las ranuras de expansión disponibles de la computadora y
mediante la ejecución de programas que procesen los datos obtenidos asi.
Todo esto hace que las computadoras sean un equipo de instrumentación ideal,
ya que además de ser altamente versátiles tienen un costo relativamente bajo,
respecto de un dispositivo de instrumentación dedicado.
La aplicación de la computación en el campo de las ciencias de la salud
se ha ido incrementando en los años recientes. En la actualidad los
instrumentos médicos de investigación, utilizan circuitos digitales, dispositivos
para el procesamiento de señales y medios electrónicos para el despliegue de
Page 9
3
resultados que convierten la información del mundo real a una forma que la
computadora pueda procesar, con el fin de que el ser humano tenga mayor
percepción de dicha información proveniente de seres vivos.
Además de esta mayor capacidad de percepción, se busca mayor
eficiencia por medio de la automatización y también una mayor confiabilidad en
los resultados de las mediciones.
Las aplicaciones de la automatización en el campo de las ciencias de la
salud abarcan diversas disciplinas como la cardiología clínica, la cual tiene
como finalidad proporcionar a los estudiantes de medicina, internos,
posgraduados en cardiología, residentes y otros médicos, una descripción
balanceada, íntegra, y actualizada de los principales aspectos de las
enfermedades cardiovasculares importantes y con las bases funcionales para
su tratamiento.
Los procedimientos de diagnóstico en cardiología se dividen en estudios
invasivos y no invasivos. Las investigaciones no invasivas son definidas como
procedimientos que no implican corte ni punción de la piel. Una de las
investigaciones básicas y sistemáticas en cardiología de este ultimo tipo es el
registro de un electrocardiograma (ECG). Se considera que el examen clínico
de todos los enfermos con problemas cardiacos, está incompleto sin el registro
de un electrocardiograma de 12 derivaciones. Por lo tanto, es importante la
obtención del registro del electrocardiograma y de su interpretación de dicha
información mediante el diseño de una tarjeta de captación de las señales
electrocardìográfkas de un ser humano, controlada a través de una
computadora personal y de un programa.
Page 10
4
El presente trabajo es el diseño de un sistema de monitoreo remoto de los
signos vitales mediante una pc.
Page 11
II ANTECEDENTES
El cuerpo humano se considera como un conjunto de aparatos y
sistemas que se encuentran en equilibrio para mantenerlo en buen estado.
Cuando se presenta alguna alteración en ellos, los mecanismos de alarma se
ponen en marcha y desencadenan cambios que manifiestan anomalías en el
organismo.
Siendo los síntomas las señales con que nuestro cuerpo nos advierte
que algo no funciona debidamente, por lo que el médico debe de interpretarlos
para obtener una diagnosis acertada. Basándose principalmente en los
parámetros fisiológicos medibles en el hombre como son: la temperatura, la
presión arterial, la frecuencia respiratoria y el electrocardiograma.
Para poder hacer dichas mediciones, es indispensable la utilización de
aparatos y dispositivos, que muchas de las veces, por su tecnología extranjera,
tienen un alto costo en el mercado nacional, presentando de esta forma
dificultad en su adquisición en diversos hospitales y centros de investigación de
la medicina. En la actualidad es de suma importancia contar con el propio
personal capacitado en el diseño, elaboración y mantenimiento de dichos
aparatos médicos.
En base a estos antecedentes y apoyado por doctores del Centro de
Investigación del Area de Biomédicas del CAMPUS COLIMA se pensó en
resolver este problema.
Page 12
IV COMPUTADORA IBM
4.1 ESQUEMA DE ENTRADA / SALIDA (E/S)1
En el esquema de E/S de la computadora IBM, a cada puerto del sistema
de E /S le corresponde un numero, llamado código de selección de puerto; en
este computadora, los puertos comienzan a direccionarse a partir de cero y, por
convención, se expresan en hexadecimal. Además, a la operación de acceso a
puerto, por parte del sistema de E/S, se le conoce también como
Direccionamiento de E/S o simplemente Direccionamiento de Puertos. En
suma, las direcciones de puertos utilizados en la computadora personal van
desde la dirección OOOOh hasta la 03FFh. De estas direcciones la computadora
utiliza los primeros 256 puertos para usos reservados del microprocesador, el
resto de los puertos se disponen para operaciones de propósito general.
Al diagrama que desglosa el direccionamiento a puerto del sistema de
E/S comúnmente se le da el nombre de Mapa de Entrada/Salida; a
continuación se ilustra en la tabla número 4.1 el mapa de Entrada/Salida de la
Computadora Personal de IBM.
1 . FUENTES COVARRUBIAS ANDRES GERARDO; AUTOMATIZACION DE UN BRAZO MECANICO DE CINCO
GRADOS DE LIBERTAD; TESIS DE MAESTRIA EN CIENCIAS COMPUTACIONALES 1995; UNIVERSIDAD DE
COLIMA.
Page 13
8
DIRECCION DISPOSlTIVO
OO- 1F
20-3F
40-5F
80 - 64
61
70,71
70 BIT 7
78
80-9F
AO -BF
CO-DF
F O
CONTROLADOR DE DMA #l , 82372-5, DISPOSITIVO DE 8 BITS
CONTROLADOR PROGRAMABLE DE INTERRUPCIONES #l, 8259A PIC
TIMER PROGRAMABLE, PTI 8254
CONTROLADOR DE TECLADO, 8742
REGISTRO DE PRUEBA EN LA TARJETA MADRE
RELOJ EN TIEMPO REAL, 146818
MASCARA DE NMI
REGISTRO DE PRUEBA EN TARJETA MADRE
REGISTRO DE PAGINA DE DMA, 74LS612
CONTROLADOR PROGRAMABLE DE INTERRUPCIONES #2,8259A PIC
CONTROLADOR DE DMA #2, 8237A-5, DISPOSITIVO DE 16 BITS
REGISTRO DE CONTROL DE SENAL BUSY DE COPROCESADOR
MATEMATICO 80x87
Fl REGISTRO DE RESET DEL COPROCESADOR MATEMATICO 80x87
F8-FF COPROCESADOR MATEMATICO 80x87
Tabla número 4.1 canales de E/S (Buses de expansión).
La unidad del sistema es el corazón de la computadora personal.
También se le conoce como Tarjeta madre y contiene todos los circuitos
básicos para el funcionamiento de la Computadora Personal.
La tarjeta madre de la computadora personal, en las computadoras IBM,
contiene de cuatro a ocho conectores conocidos como Ranuras de expansión
del sistema, canales de Entrada/Salida o simplemente buses de expansión.
Su razón de existencia es permitir ampliar las capacidades de la unidad del
Page 14
9
sistema. Gracias a los canales de Entrada/Salida es posible que el usuario
adapte la computadora personal a actividades para las cuales la configuración
estándar de la computadora personal no ha sido diseñada. Esta adaptación se
lleva a cabo conectando tarjetas o placas especiales para aumentar las
funciones de la computadora personal. Es decir, las tarjetas opcionales pueden,
en cierto momento, adecuar a la computadora a la medida de las necesidades
del usuario.
Independientemente de la tarjeta conectada, el bus de expansión tiene
un único objetivo, que es transferir datos desde la placa principal a aquella, y
viceversa. El número de canales y la velocidad de estos está en relación directa
a las características del CPU utilizado en la tarjeta madre. En lo anterior radica
el tipo de arquitectura para canal de E/S que se utiliza en la tarjeta principal.
4.2 TIPOS DE ARQUITECTURAS DE LOS CANALES DE E/S.
El éxito del IBM-PC radica en la denominada arquitectura abierta, este
término no sólo involucra la estrategia para estandarización de los sistemas de
cómputo, sino que tiene que ver con la estandarización del canal de E/S.
Gracias a la publicación de las especificaciones de bus de IBM, otros
fabricantes pueden diseñar y fabricar otros productos con la garantía de
funcionamiento en la computadora personal.
La primer tecnología de canal que apareció comercialmente fue la
denominada ISA, Industry Standard Architecture, es decir arquitectura
estándar para la industria. Desde su origen fue un bus de ocho bits y ha
funcionado para computadoras de ocho y dieciséis bits desde su aparición. Con
la evolución de la Computadora Personal han aparecido otros estándares de
Page 15
10
fabricación, el que siguió a ISA fue denominado EISA o Exteded ISA, este canal
fue creado por un consorcio de fabricantes (Compaq, Hewlett-Packard, Nec,
Zenit, Ast, Epson, Wyse, Olivetti, y Tandy). El conector para EISA cuenta con
contactos que lo hacen compatible con el anterior ISA, mas contactos con las
funciones extendidas.
La principal ventaja del canal EISA es su capacidad de realizar
intercambios de datos entre periféricos sin la intervención de la CPU, función
determinada Bus Mastering. Por otro lado, la velocidad de transferencia de bus
EISA se encuentra dentro del rango de hasta 33 MHz, mientras que la ISA no
supera los 20 MHz. La respuesta de IBM a la expansión ISA fue de arquitectura
microcanal, MCA. La diferencia más obvia entre los buses ISA y MCA radica en
el tipo de conector usado. Por otro lado, dado que Microcanal plantea un inicio
desde cero para su diseño, IBM decide radicalmente cambiar la disposición de
las señales y también adicionar funciones nuevas.
4.3 La Arquitectura de canal ISA de ocho bits.
El bus de expansión ISA, en una Computadora Personal de IBM,
consiste de un canal bidireccional de datos de ocho a dieciséis bits, 20 líneas
de direcciones, 6 niveles de interrupción, líneas de control para
Escritura/Lectura, líneas de temporización, tres canales DMA y líneas de
voltaje y tierra.
Entre sus características más relevantes están: direccionamiento de E/S
desde la localidad O1OOh hasta la 03FFh, 24 líneas de direccionamiento a
memoria, 6 canales para efectuar interrupciones, 5 canales para DMA, línea
Page 16
ll
para generar estados de espera, arquitectura de bus abierta; lo anterior permite
que múltiples procesadores compartan los recursos del sistema, incluyendo la
memoria.
BI
BI0
B20
B31
A l
Al0
A20
A31
Figura número 4.1 Bus de E/S arquitectura ISA de 8 bits
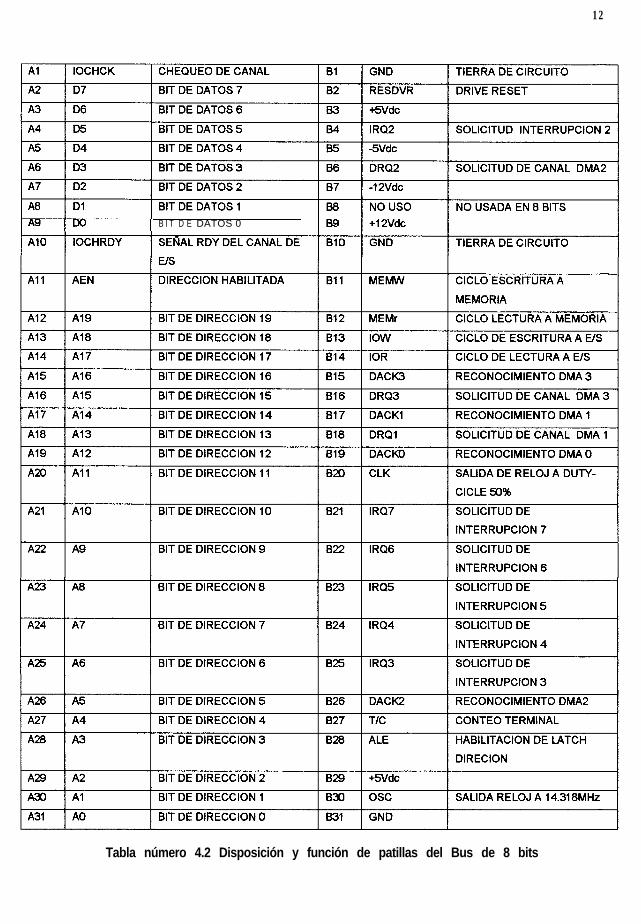
La figura número 4.1 ilustra la forma y distribución de las patillas en el
canal ISA, esta especifica un conector plano Dual-In-Line de 62 terminales, 31
por cada lado. Las dimensiones son de 5 1/6” de largo por 13/16” de ancho, el
patillaje esta distribuido a lo largo de éste con una separación de 1” . La función
de cada una de las patillas se ilustra en la siguiente tabla número 4.2:
Page 17
12
B I T D E DATOS 0
Tabla número 4.2 Disposición y función de patillas del Bus de 8 bits
Page 18
13
V TARJETA DE ADQUISICION
Con base a estas consideraciones de los estándares se diseña una tarjeta
de adquisición de datos que se conecta directo a una de las ranuras de
expansión de la PC, esto es para que todas las señales de los sensores se
ajusten a los niveles de voltaje requeridos para el acoplamiento a esta tarjeta la
cual consta de:
a) Un circuito convertidor de señales analógicas a digitales (AID).
b) Un circuito decodificador de direcciones
c) Circuito de registros externos
d) Circuito de interrupciones
e) Circuito separador del bus del sistema
5.1 Circuito convertidor de señales analógicas a digitales
(A/D)
Se empleó el convertidor A/D ADC0809 por su facilidad de interface para
cualquier microprocesador u operador, bajo costo y facilidad de adquisición en
el mercado nacional.
El ADC0809 es un circuito para la adquisición de datos, que tiene 8
canales de entradas analógicas multiplexadas. Un canal de entrada en
particular se selecciona usando el código de direcciones de la tabla número 5.3
que se presenta.
Page 19
malSeleccionado
INOIN1IN2IN3IN4IN5IN6IN7
cLínea de diercciones
B 1 A
LHLHLHLH
Tabla número 5.1 tabla de selección de canal ADC0809
El ADC0809 tiene una entrada de reloj, el reloj se hizo utilizando
compuertas lógicas, la velocidad de conversión del ADC0809 es de 500KHZ.
5.2 DECODIFICADOR DE DIRECCIONES2
Todo puerto de tarjeta de interfaz tiene asignada una dirección de E/S. El
mapa de E/S, característico de toda PC, hace una descripción del espacio de
direccionamiento asignado por el diseñador a cada interfaz dentro del sistema.
Page 20
1 5
Es responsabilidad de la interfaz el contar con un medio de saber que la
dirección actual en el bus de direcciones hace referencia a alguno de sus
puertos.
Este medio es previsto por el Decodificador de Direcciones. Para esta
interfaz se cuenta con un conjunto de tres circuitos integrados 74LS138, estos
tienen la capacidad de decodificar hasta cuatro puertos de salida y cuatro de
entrada figura número 5.1.
Figura número5.1 circuito decodificador de direcciones
2 . FUENTES COVARRUBIAS ANDRES GERARDO; AUTOMATIZACION DE UN BRAZO MECANICO DE CINCO
GRADOS DE LIBERTAD; TESIS DE MAESTRIA EN CIENCIAS COMPUTACIONALES 1995; UNIVERSIDAD DE
COLIMA.
Page 21
16
5.3 REGISTROS EXTERNOS3
El circuito de registros externos se implementa por medio de circuitos
integrados tipo registro octal. Los que se utilizan son 74LS573 como puerto de
salida y como puerto de entrada se utiliza el circuito integrado 74LS245.
Para operar cualquiera de estos puertos es necesario simplemente
conectarlo a la salida correspondiente del circuito decodifkador, la lógica de
programación será responsable del direccionamiento de estos figura número
5.2
l- G
Il7 - - - - - ‘ D E ?
74LS245
Figura número 5.2 registros externos
3 . FUENTES COVARRUBIAS ANDRES GERARDO; AUTOMATIZACION DE UN BRAZO MECANICO DE CINCO
GRADOS DE LIBERTAD; TESIS DE MAESTRIA EN CIENCIAS COMPUTACIONALES 1995; UNIVERSIDAD DE
COLIMA.
Page 22
17
5.4 SISTEMA DE INTERRUPCIONES4
Una interrupción es una primitiva de control externa de tipo hardware que
permite avisar al microprocesador de la ocurrencia de un suceso que precisa su
atención y tratamiento.
Cuando un dispositivo desea obtener los servicios del microprocesador
debe enviar una señal correspondiente de interrupción a nivel alto. Las señales
de petición, IRQ del PIC, son líneas disparadas por borde. La lógica de disparo
de cada línea responde a un cambio de nivel de cero a uno y no al nivel uno.
Por lo anterior se dice que la lógica es disparable por borde.
El funcionamiento de este circuito es el siguiente. La señal RESDRV es
una continuación de la señal RESET del microprocesador y es activa en alto,
dicha señal tiene la misión de inhibir las interrupciones del ADC0809 hasta que
estas sean habilitadas por un puerto de salida PsO. El pulso de reloj de PsO en
el Cl 74LS74 (Flip-Flop) lo enviará a nivel uno permitiendo la interrupción del
ADC0809, esta lógica permite la interconexión de múltiples dispositivos en la
modalidad de AND - CABLEADA Figura número 5.3
Page 23
18
Figura número 5.3 servicio de interrupciones
4. FUENTES COVARRUBIAS ANDRES GERARDO; AUTOMATIZACION DE UN BRAZO MECANICO DE CINCO
GRADOS DE LIBERTAD; TESIS DE MAESTRIA EN CIENCIAS COMPUTACIONALES 199; UNIVERSIDAD DE
C O L I M A .
Page 24
19
5.5 CIRCUITO SEPARADOR BUS DEL SISTEMA-INTERFAZ5
El circuito cuenta con lógica adicional para establecer la dirección de flujo
de los, la señal DIR del circuito integrado 74LS245 es manejada por el
decodificador, explicado a continuación, cada que sea direccionado un puerto
de lectura la compuerta 74LS21 responderá enviando su salida a nivel bajo.
Esto programará al 74LS245 en la modalidad de entrada, es decir, los datos
pasarán de la ínterfaz hacia el bus de datos del sistema. Para todos los casos
en los cuales sea direccionado un puerto de salida el 74LS245 permanecerá en
la modalidad de salida de datos figura número 5.4.
Figura número 5.4 circuito separador bus del sistema-ínterfaz
5. FUENTES COVARRUBIAS ANDRES GERARDO; AUTOMATIZACION DE UN BRAZO MECANICO DE CINCO
GRADOS DE LIBERTAD; TESIS DE MAESTRIA EN CIENCIAS COMPUTACIONALES 1995; UNIVERSIDAD DE
C O L I M A .
Page 25
20
’ ’ ’ 74LS
L!.
I138
74~s 138
DB7...l
~e>nn
Figura 5.5 esquemático del circuito completo de la tarjeta de adquisición.
Page 26
21
VI ELECTROCARDIOGRAMA
6.1 INTRODUCCION
Es necesario considerar la anatomía y funcionamiento del corazón en el
sistema cardiovascular, para entender el origen y significado del
electrocardiograma.
Las cuatro cámaras del corazón actúan como dos bombas sincronizadas
de dos etapas. La parte derecha suministra sangre a los pulmones para su
oxigenación en la circulación pulmonar.
La parte izquierda suministra sangre para el resto del sistema
(circulación principal). La sangre llega a la aurícula derecha proveniente del
sistema venoso. Cuando ésta se llena, se contrae y obliga a la sangre a pasar
al ventrículo derecho a través de la válvula tricúspide, el cual entonces se
contrae para bombear la sangre al sistema circulatorio pulmonar. En el sistema
pulmonar la sangre se oxigena y entra a la aurícula izquierda. Desde aquí es
bombeada a través de la válvula mitral o bicúspide al ventrículo izquierdo.
Cuando los músculos del ventrículo izquierdo se contraen, la sangre es
bombeada al sistema circulatorio principal. Las dos aurículas están
sincronizadas para bombear juntas, después los dos ventrículos actúan juntos.
La excitación eléctrica del corazón es iniciada en el nodo sinusal (SA) o
marcapaso, el cual es un grupo especial de células autoexitables. El marcapaso
genera espontáneamente potenciales de acción a una frecuencia regular,
aunque esta es influenciada por nervios que la aumentan o disminuyen.
Page 27
22
Para iniciar el latido de corazón, el potencial de acción generado por el
marcapaso (nodo sinusal) se propaga en todas direcciones a lo largo de la
superficie de ambas aurículas hacia la unión de las aurículas y ventrículos,
nodo auriculoventricular (AV). En este punto, fibras nerviosas especializadas
actúan para retardar la propagación, así como para proveer un tiempo propio
entre la acción de bombeo de las aurículas y ventrículos. Durante este tiempo
de retardo, las aurículas completan su contracción, bombeando la sangre hacia
los ventrículos para completar su llenado. Después, en el nodo AV se inicia el
impulso, el cual se propaga a través del haz de His y de ahí a las ramas del Haz
que se conectan a las fibras de Purkinje. Estas se extienden en todo el
miocardio de los ventrículos como se observa en la figura número 6.1a y 6.1 b.
Page 28
2 3
ARTERIA CAROTSDA X29UIERDA
TRONCO BRAOUXOCEFALSCUARffSIA SUBCLAVIA IZ@UIERDA
TRONCO PULflONAR fZQUIERDd
VENA CAVA SUPERIOR
ARTERIA PULMONAR_ ’
VENA FULMONAR DERECHA
VWVULA FULIIONAR SEMILUNAR-
AURICULA DERECHA--
VALVULA tRXUCFIDEJ
VENAS PULMONARES IZW~ERD
AURÍCULA I Z Q U I E R D AXY
VALVULA AORT JCA SEM ILU NAR ‘f
VALWLA B 1 CUSP 1 DE
IZQUIERDO ;‘I
1e
AORTA DESCENDENTE
VENA CAW XNFERtUR __ \ !P
Figura número 6.1a corte anatómico de la circulación del corazón
Page 29
2 4
NERVIO VAGO.NERVIO CARDIACO.*
(CARDI 0 ACELERADOR)‘(NERVIO CARDXO 1_ _ _ . . -
:BIDOR)
.
NODO ‘S 1 tJUSAt ’’ (MARCA FASO).- --
XULOVENTRJCULAR
HAZ DE H1S
RAMA DERECHA DEL
BRAS D E
T13
Figura número 6.1 b corte anatómico de la estimulación eléctrica del corazón
La figura numero 6.2 muestra un típico ECG, el cual es obtenido desde la
superficie del cuerpo. Para facilitar el reconocimiento y análisis, el segmento
horizontal (línea basal) de esta forma de onda se le conoce como la línea
isopotencial 0 isoeléctrica.
La onda P representa la actividad eléctrica asociada con la
despolarización del músculo de la aurícula (formando una onda positiva)
Page 30
25
viajando desde el nodo SA hacia el nodo AV como se observa en la figura
número 6.3a.
Considerando que la despolarización de las aurículas ocurre en una
dirección general, los ventrículos se despolarizan en tres direcciones.
Inmediatamente después del período de retardo del impulso, la despolarización
inicial de los ventrículos comienza justo debajo del nodo AV, como se muestra
en la figura número 6.3b. Dado que la pared del ventrículo izquierdo es más
gruesa que la pared del ventrículo derecho, la onda despolarizante viaja desde
la izquierda a la derecha causando que el lado izquierdo sea negativo mientras
el lado derecho es positivo. Este es registrado como la onda Q, que aparece
debajo de la basal (negativa). Normalmente la amplitud de la onda Q es menor
que la onda P y no es observable en algunos trazos.
La figura número6.3c muestra el vector de la onda R, y representa la
despolarización de la mayoría de la musculatura restante ventricular. Esta onda
es usualmente la característica más prominente en el ECG. El valor pico normal
de la onda R es de aproximadamente de 1mV, cuando es medido en la
superficie de el cuerpo y cerca de 40mV cuando es medido dentro del corazón.
El vector de la onda S se muestra en la figura 6.3e y representa la
despolarización de la porción restante de la masa muscular de los ventrículos.
Cuando los ventrículos comienzan a despolarizarse, ellos se contraen y más
tarde se repolarizan. La repolarización ventricular se representa por la onda T.
La onda U, si se presenta, es generalmente desarrollada como resultado de los
pospotenciales de la musculatura ventricular.
Los valores de amplitud pico para un ECG normal (medido en la
superficie del cuerpo) son los siguientes tabla número 6.1:
Page 31
26
ONDA
P
Q
R
S
T
0.2mV
O.lmV
0.5 a
1.5mV
0.2mV
0.1 a
0.5mV
Tabla número 6.1
Otra de sus características importantes del ECG son sus intervalos
y segmentos identificados. Los valores típicos para un adulto normal con
una frecuencia cardíaca de 60 pulsos por minuto son los tablas números
6.2a y 6.2b:
INTERVALOS
0.35 a 0.40s I
Tabla número 6.2a
Page 32
27
SEGMENTOS
Tabla número 6.2b
E C Gt ipico
Figura número 6.2a
Page 33
28
Figura 6.3 el electrocardiograma: b) vector onda P ilustra despolarización de las
aurículas; c) vector onda Q; d) vector onda R; e) vector onda S
Con base a estas consideraciones, el electrocardiograma se dividió
para su diseño y construccíbn en las siguientes partes:
4WCI
6 .2
amplificadores.
Filtros activos.
Circuito de aislamiento eléctrico
Amplificador de electrocardiográma
Para obtener el registro de la actividad eléctrica del corazón, manifestada
como una diferencia de potencial y la cual es de una amplitud de ImV, se
emplean tres electrodos colocados sobre la piel, formando un triángulo como se
aprecia en la figura número 6.4. bes de los electrodos son el “vivo” de la señal
Page 34
29
y el otro sirve como referencia. Dado el nivel tan pequeño de la señal es
necesario aumentar su amplitud de 200 a 500 veces.
Para un caso como el presente, en donde una pequeña señal debe ser
amplificada en presencia de señales comunes de interferencia eléctrica, resulta
muy conveniente emplear un circuito con amplificación diferencial, figura
número 6.5. Como su nombre lo indica, la salida es una réplica amplificada de
la diferencia entre las dos señales de entrada.
Para entender el uso del amplificador diferencial, si conectamos los
electrodos A y B los cuales son el “vivo” de la señal a un circuito de
amplificación diferencial entre ambos electrodos. Puesto que la salida es una
reproducción amplificada de esta diferencia, con este tipo de amplificación se
cumple el objetivo deseado.
En contraste, si de los dos electrodos, uno de ellos fuera conectado a la
única entrada y el otro a la referencia de un circuito amplificador simple figura
número 6.6, tanto la señal de ECG y el voltaje de interferencia serían
amplificados por igual.
Si el voltaje de interferencia fuera mayor, la señal de ECG se perdería.
Debido a que la señal que se obtiene es pequeña, y considerando que la
impedancia de entrada que presenta un amplificador diferencial salida única es
baja, figura número 6.5, esta afecta a la señal obtenida, por lo que se emplea
un amplificador diferencial y enseguida un amplificador diferencial salida única,
conformando un amplificador de instrumentación.
Page 35
30
Para evitar choques eléctricos al paciente proveniente de nuestro
instrumento es necesario referirlo a tierra física y es conveniente que el
paciente se encuentre aislado.
Con la configuración antes mencionada se logra tener tres características
que son importantes para este caso, que son:
- Alta impedancia de entrada
- La variación del factor de amplificación se obtiene variando un solo
elemento
El rechazo de modo común es oproximado de IOOdb.
Al obtener el registro de ECG se captan en los electrodos señales
eléctricas debidas a la actividad de otros órganos, por lo cual el registro no se
verá limpio, y será necesario eliminarlas filtrando dichas señales. Para tal
efecto, se agregó al amplificador diferencial salida diferencial, figura número
6.4, un capacitar en paralelo con la resistencia de retroalimentación, formando
un filtro pasa bajos, por lo que el circuito queda como se muestra en la figura
número 6.4.
Page 36
3 1
I
VE2
1VS1
R6
Figura número 6.4 Amplificador de instrumentación
LVS
Figura número 6.5 amplificador diferencial
Page 37
32
iv
-
Figura número 6.6 Amplificador simple
6.3 CALCULO DE LOS COMPONENTES
Para el análisis considerando que
ZI = RI’// Xcs’
22 = R2’
23 = R3’ ll Xc4’
Page 38
33
La ecuación general del amplificador operacional es
VS = A(el - e2)
Para el primer operacional se tiene:
vszz1+vsl(zz+z3)
e2 =
Zl +z2+z3
el = VSI
Sustituyendo en la ecuación general (6.1) se tiene
Vei(Z1 + 22 +Z3) - VS~ZI
VS1 =
(Zl + 22 +z3)
+z2+Z3
A
Considerando que A >> se tiene
Vel(Zi + 22 +Z3) - VS~ZI
VS1 =
22 + 23
(6.2)
Page 39
34
Para el segundo operacional se tiene
Vslz3+ Vs2(z2 +Z1)
e2 =
z1+z2+z3
et = Ve2
Sustituyendo en la ecuación general (6.1) se tiene
Ve2(Zi + 22 +Z3) - Vs1Z3
VS2 =
(Zl + 22 +z3)
+z2+z1
A
Considerando que A >> se tiene
Vez(Z1 + 22 +Z3) - VsiZ2
VS2 =
z2+ Zl
Para el tercer operacional se tiene
(6.2)
VS227
el =
&+ z6
Page 40
35
VS1 ZS + VS 24
e2 =
24 +z6
Sustituyendo en la ecuación general (6.1) tenemos
VS2 27 VS1 z6 + VS 24
VS = A - (
z!5 + 27 z4+z6
Considerando
27= z6 y h= 24
ZS
(VS2 - VSI)
z4+ z6
VS =
1 24
+
A z4+ z6
Si A>>
Page 41
36
z6
VS = (VS2 - Vs2) VW24
Restando la ecuación 6.2 de la 6.3 y considerando que Z1 = 23 =Z
Z
(Ve2 - Vel)( 1 + )
z2+z
VS2 - VS1 =
Z
1 -
z2+z
22
Vs2 - VSI = (Ve2-Vei ) ( +l)
22
Sustituyendo la ecuación 6.5 en la 6.4 se tiene
22 z6
VS = (Ve2-Vel) ( -+w - 1
22 24
(6.5)
(6.6)
Page 42
37
Como Z = ZI = 23 y ZI = RI’ //Xca’ , 23 = R3’ //Xcd
RI’=R~‘=R y C3’=Cb=C
R
z =
RsC + 1
22 = R2’ ; 24 = Rb ; z6 = R6’
Sustituyendo lo anterior en la ecuación 6.6 se tiene
2R R6’
VS = (Ve2-Vef)( + vc 1
R2’ ( RsC + 1 ) R4’
De donde
2R
R2’
+ 1 define el factor de amplificació del amplificador
diferencial salida diferencial (6.7)
Considerando a s = jw se tiene
1
W= define la frecuencia de corte del filtro
R C
v3.8)
Page 43
3 8
R6’
G =
R4’
define la ganancia del amplificador
difrencial salida única (6.9)
Debido a la limitante en consumo de corriente, se utiliza el amplificador
operacional MC 1776C el cual permite en su terminal número 8 programar su
consumo de corriente por medio de una resistencia al común o Vee. En este
caso, dicha resistencia es de 8.2MR conectada a Vee.
Por las curvas del C.I., el consumo resultante es de 5 FA con una
corriente de polarización de entrada de 0.75pA. considerando que sea de 15
veces dicha corriente la mínima que fluye por R2r y para una ganancia mínima
de 46 y una máxima de 60 tenemos:
Para el cálculo de los componentes se toma la mínima ganancia que es
de 46.
(E2 - El) 1 x 1 0 ”
Para R2’ = = = 88.8 kQ
Imin 11.25x 1o-g
En razón de que no existe el valor antes calculado comercialmente se
colocará un arreglo de elementos formado por una resistencia de 68 ki2 y un
pre-ajustable de 2OKQ dando un valor de 88kR por lo que:
Page 44
3 9
d e
RQ = 68kQ
PI =zoKQ
R2’ = RQ+ PI = 88kQ
2R
+ 1 =46
R2’
( 4 6 - l)R2’ (45)(88xloS)
Despejando a R = = = 1.98MR
2 2
el valor comercial más cercano es de 2MQ por lo que
R7 = RB = RIO = R~I = 1 MR
Para el valor del capacitar se requiere que la frecuencia de corte sea a
los 120Hz. De la expresión de la frecuencia de corte ecuación (6.8 ) se despeja
a C y se tiene:
1 1 1
C = = = = 663pF
WR 2tiR 2p(l20) (2 x 10 8,
Como no existe comercialmente el valor encontrado se pene el valor más
próximo alto, debido a que si se pone el valor próximo bajo, la frecuencia de
corte sería más alta de la deseada, provocando problemas de ruido.
Page 45
c3 = c4 = 68OpF
La ganancia de la tercera etapa se propone de 10 ya que se desea que
la amplitud máxima que se obtenga a la salida se de 600mV.
R6’
= 10
R4*
El voltaje de entrada esperado es de 46mV y la corriente a fluir por R4’
es de 120nA se tiene:
46~10%
R4’ = = 383.3KQ
120x10~
despejando a Rs’ de la ecuación de ganancia (6.9) se tiene:
Rs’ = R4’ (10) = 383.3KQ( 10) = 3833MQ
Debido a que los valores anteriores no son comerciales se ponen en su
lugar el valor más próximo cercano por lo que:
R4’ = R12 = RIS = 39OKsz
R6’ = R7’ = 3.9MR
Rs’ = R13 + R14
R7’ = R16 + R17 + P2
R16 = R17 +P2
R17 = 1.5MR
R,6= IMSZ
Page 46
4 1
l P2 = 4.7Ki-2
l Este pre-ajustador sirve para ajustar el rechazo de modo común
figura número 6.4.
6.4 CIRCUITO DE AISLAMIENTO ELECTRICO
Por razones de seguridad hacia el paciente, la toma del registro del ECG
debe estar aislado de tierra física.
El problema ahora es obtener la señal del ECG del circuito flotante al
circuito aterrizado o referido a tierra física, figura número 6.7.
Figura número 6.7. circuito de aislamiento.
Este circuito es formado por un amplificador no inversor y un
optoacoplador. El amplificador no inversor tiene una ganancia positiva y alta
impedancia de entrada. La señal proveniente del filtro es acoplada
capacitivamente a este circuito el cual tiene como función aplicar una corriente
al diodo LED del optoacoplador del circuito de aislamiento, controlada por las
Page 47
42
variaciones de la señal del ECG, de modo que la luz emitida por este LED
cambie en intensidad siguiendo fielmente las variaciones de la señal del ECG.
La corriente aplicada al LED se limita en valor por 2.2KQ. La ganancia del
amplificador está fijada en 4.7 y se calcula por medio de la siguiente ecuación:
Vout = 1 + (Ry/Rz) Vi n
Donde:
RZ = 47OK0
RB = 47Ki.I
Vout = Es el voltaje de salida
Vin = Es el voltaje de entrada.
El optoacoplador aísla el voltaje de la computadora, la señal que se
capta del ser humano, evitando así que el paciente pueda sufrir alguna
descarga eléctrica.
Los circuitos hasta esta etapa son alimentados por medio de dos
baterías de 9V de las obtenibles en forma comercial, con lo que se cumple el
primer requerimiento del diseño, evitar el paso de corrientes mayores de 1 mA al
paciente.
El opto acoplador tiene como salida un fototransistor polarizado como
seguidor de voltaje, por lo que la señal luminosa modulada por la señal del ECG
que recibe en su base es transducida a variaciones de voltaje que siguen
fielmente las caracteristicas de la señal del ECG detectada, y como la
transmisión de las señales es por medio de luz no existe conexión eléctrica
entre el paciente y este circuito y los siguientes que estén alimentados por las
fuentes de la computadora, logrando así el aislamiento eléctrico, paciente-
computadora
Page 48
4 3
6.5 PULSO DE CALIBRACION
Con el objeto de tener una referencia con la cual poder conocer los
voltajes reales de un registro de ECG, es indispensable que se suministre a la
entrada del amplificador un pulso de calibración de ImV, y además poder, en
un momento dado, saber que éste está funcionando correctamente. Este pulso
se obtiene manualmente mediante el arreglo, mostrado en la figura número 6.8.
Ve1
Figura número 6.8 pulso de calibracibn
Como este pulso sirve también para comprobar el funcionamiento del
preamplificador se requiere que pase los dos amplificadores de entrada. Cada
uno de ellos deberá observar 0.5mV pero con diferente polaridad para que,
cuando se efectúa la diferencia se obtenga a la salida el pulso equivalente de
1 mV.
La corriente mínima que se desea que fluya por este circuito es de 3pA
por que:
0.5x 10%- -R - = 166.6i.I
~xIO-~A
Page 49
4 4
v+-o.5x103 3-o.5x103v
RI = = = 999.9Ki-2
3x1o-6 3 xIO-~A
R’ = R2 + R3
R2= Rs= 10052
R3=R6=68R
Page 50
45
6.6 FILTRO PASA BANDA
Este filtro se utiliza para dejar pasar una banda de frecuencia específica,
mientras atenúa todas las señales que caen fuera de esta banda.
La frecuencia central a la cual este filtro presenta su máxima ganancia en
voltaje es de 2.665Hz (fc) que corresponde a la frecuencia central de los pulsos
del corazón. La frecuencia de corte superior (fs) e inferior (fi) son de 5Hz y
0.33Hz respectivamente, las cuales determinan el ancho de banda del filtro (B)
que queda definido de la manera siguiente:
B=Ws-Wi
A la razón de la frecuencia central a el ancho de banda se le conoce
como factor de calidad (Q) del filtro.
Hc
Q = -
B
La configuración del filtro pasa banda empleada es mostrada en la figura
número 6.9
Page 51
46
Figura número 6.9 filtro pasabanda
6.7 CALCULOS DE LOS COMPONENTES DEL FILTRO
El circuito de la figura No-13 lo podemos representar como el de la
figura No-l 7
Page 52
47
Figura número 6.10 diagrama esquemático del filtro
Para el nodo A aplicando la ley de corriente de Kirchhoff (LCK)
tenemos
ll +l4 = 12 + 13
Para el nodo B aplicando LCK
12 + Is = 0
Definiendo las corrientes como sigue
Il = (Ve - VA)%
12 = ( VA - VB ) Y2
(6.10)
(6.11)
(6.12)
(6.13)
Page 53
48
13 = VA Y3
14 = ( VS - VA ) Y4
15 = ( VS - VB ) Y2
(6.14)
(6.15)
(6.16)
Sustituyendo 6.13 y 6.16 en 6. ll tenemos:
(VA - vB)Y2 + (VS - VB)Y5 = 0
Considerando que A>> entonces VB = el = 0, por lo que la ecuación
anterior queda como sigue:
vAY +vSY5 = 0
-VS Y5
VA =
Y2
Sustituyendo 6.17 en 6.12, 6.13, 6.14 y 6.15
VS Y5
Il = (Ve + 1 y1
Y2
(6.17)
VS Y5 Y2
12 = - = -VsY5
Y2
Page 54
49
VS Ys Y3
13 = -
Y2
VS Y5
14 = (VS + > y4Y2
Sustituyendo las ecuaciones anteriores en 6.10
VS Y5 VS Y5 VS Ys Y3
(Ve + )Yl + (VS + )Y4 = -VsY5 -
Y2 Y2 Y2
VS Y5 Yl VS Y5 Y4 VS Y5 Y3
VSYI + + VsY4 + = -VsY5-
Y2 Y2 Y2
Y5 Yl Y5 Y4 Y5 Y3
VS ( + Y4 + + Y5 + )= -VeYl
Y2 Y2 Y2
Page 55
50
V S Yl
= -
V e Y5 Yl Y5 Y4 YsY3
(- +Y4+ + Y5 + 1
Y2 Y2 Y2
V S Yl Y2
V e Y4Y2 + Y5 (Yl + Y4 + Y2 + y3)
Para un filtro de paso banda de 1 polo, se definen las admitancias como
sigue:
1
Yl =
R7’
1
Y3 =
R18’
Y2 = S CQ
Y4 = s Cl0
1
Y5 =
RIQ’
Page 56
51
Sustituyendo en la función de transferencia, se obtiene:
VS -s [ R1:Tlo 1=V e
-
+
1 1
+
RI 7’ R18’
Rw’ Cs CIO -
La función de transferencia que describe un filtro pasa banda de 2”-
orden ( 1 polo ) es:
Vo -wo2s
=
Vi w o
s* + S + w o
Q
Page 57
5 2
Comparando los términos de esta última ecuación con la anterior
tenemos:
1
woz =
R17’C10
1 1
( + 1R17’ Rl8’
wo =
Rw’ Cs CIO
w o c9 + Cl0
=
Q Rlg’ Cs CIO
Con el fin de simplificar el diseño y reducir el número de cálculos, se
eligen los valores de WC y Q, que de acuerdo a lo anterior: WC = Wo y Cg =
CIO, y se encuentran los valores de R17’ , R 18' y Rw’ mediante las siguientes
ecuaciones:
Page 58
5 3
2
Rm’ =
B C
R17’ =
Rw’
2Ar
R18’ =
Rm
4Q - 2Ar
Donde B esta en radk Ar es la ganacia del filtro.
Considerando que:
fc = 2.665 Hz
f s =5Hz
fi = 0.33 Hz
Entonces:
W C = 271 fc = 2x(2.665) = 16.74 rad / s
w s = 2719s = 2x(5) = 31.41 rad / s
wi = 2zfi = 2x(0.33) = 2.07 rad / s
B = ws - wi = 31.41 - 2.07 = 29.34
W C 16.74
Q = = = 0.5705
B 29.34
Page 59
54
Proponiendo C = 68nF y sustituyendo estos valores en las expresiones
anteriores que contienen a R17’ , Rm’ , y Rw tenemos:
Para garantizar que RI 8’ tenga un valor positivo, 4Q2 > 2Ar debe cumplirse
A r = 0.50
RI 9’ = 1.003 MR
RI 7’ = 0.909 MKI
RI8 = 781.25 KC2
Como los valores anteriores no son comerciales se hacen arreglos para
que den el valor aproximado quedando como sigue:
R19’ = Rz + Rx3 = 1 MR + 33tKI = 1.0033MRR17,= R28 + RB + R3o = 82Om + 82W+6.8Ki-2 = 909.8KszR18 = R31 +R32 = 56OtKI +220 Kil= 780 Kt-2
Respectivamente.
6.8 ELEVADOR DE NIVEL
La salida proveniente del preamplificador de ECG trae la señal referida al
común flotante, para poder efectuar el acoplamiento entre tierras, es
indispensable montar esta señal en un nivel de voltaje. Dado que el convertidor
análogo digital (A/D) empleado no puede manejar voltajes negativos y como la
señal de ECG tiene variaciones en el rango de +/-IV, este circuito se encarga
de desplazar la referencia de la señal o “cero” a 1.W que es la mitad del voltaje
de referencia fijado al convertidor AID, de este modo cuando la señal del ECG
valga -IV el voltaje que le llega al A/D es 0.5V y cuando la señal sea de +lV el
Page 60
55
voltaje en el convertidor será de 2.5V, por lo que la señal del ECG para el
convertidor A/D variará únicamente dentro de valores positivos, figura número
6.11
Figura número 6.11 elevador de nivel
Para el nivel de referencia se tiene un divisor de voltaje en el cual se
desea que fluya una corriente de IOOfl, y un voltaje de 1.W. Y para este
amplificador la ganancia es unitaria.
Por lo que :
R28’ = RB’ = 1oom
vcc - Vo 12 - 1.5
51' = = = 105Ki-l
I 0.1x10 3
vcc 51'
V o =
PB + 51'
vcc 51’5= - 5 1 '
V o
Page 61
12(100000)
P3= - 100000 = 15ta
1.5
Page 62
5 7
Vel-
Vc-Rl
R2
FR3
c5
b
ESQUEMATICD COMPLETO DEL ELECTROCWKlGRAW
Page 63
58
CONCLUSIONES
Como todas las señales bioeléctricas son muy débiles y contienen
mucho ruido, es necesario seleccionar los componentes, un criterio razonable
es que el ruido esté comprendido entre 1 OnV y 1 OOnV referidos a la entrada del
amplificador operacional, para esto se dan algunas condiciones para el diseño
de los amplificadores para señales bioeléctricas:
* La primera condición que debe cumplir un amplificador de señales
bioeléctricas es la de ser diferencial.
* El amplificador diferencial debe cumplir las siguientes características:
- Poseer un rechazo al modo común muy elevado.
- Poseer impedancias de entrada muy elevadas para:
a) Disminuir la interferencia diferencial debida a la red.
b) Evitar la distorsión del biopotencial.
l La exigencia de impedancias de entrada muy elevadas lleva consigo la
necesidad de un tercer electrodo que permita el cierre a tierra de las
corrientes de polarización a través del paciente. Ello conlleva las
siguientes ventajas y desventajas:
VEN-I-AJAS
Page 64
59
- Permite el funcionamiento del sistema.
- Disminuye la interferencia de modo común.
INCONVENIENTES:
- Disminuye la seguridad del paciente.
También en esta etapa de desarrollo el sistema no puede ofrecer más
información que la de la derivación DI, limitante que puede ser solucionada al
agregar al sistema la capacidad de muestreo de las otras ll derivaciones.
Otro factor a considerar es el hecho de que los circuitos encargados de
amplificar la señal del paciente funcionan con baterías, lo cual resulta poco
práctico, este inconveniente puede eliminarse al diseñar una fuente aislada que
se alimente con la energía de la misma computadora donde se instale la
interface.
Así mismo el software de control se encuentra en una etapa de
desarrollo inicial, pero con las modificaciones adecuadas, se podría dotar al
sistema de desplegado simultáneo de las derivaciones de interés, de los valores
cuantitativos de amplitud de la señal, duración de segmentos de interés,
almacenaje de secciones del estudio de particular importancia, etc., por estar
contenido todo el sistema en una sola tarjeta que se insertaría en cualquier
ranura de expansión de una computadora personal, se obtendría un sistema de
electrocardiógrafo con características usualmente no disponibles en los
sistemas tradicionales.
Page 65
60
BIBLIOGRAFIA
COUGHLIN ROBERT F. Circuitos integrados lineales y amplificadores
operacionales. Prentice-Hall. 1987.
FERRER0 CORRAL JOSE MARIA. Bioelectrónica. Universidad política de
Valencia. SPUPV-94-747.
FUENTES COVARRUBIAS ANDRES GERARDO. Automatización de un brazo
mecánico de cinco grados de libertad. Tesis de maestría en ciencias
computacionales 1995. Universidad de Colima.
JOYANES AGUILAR LUIS. Turbo Pascal. McGraw-Hill
KAUFMAN Y SEIDMAN. Manual para ingenieros y técnicos en electrónica.
McGraw-Hill. 1985.
LINEAR 2 DATABOOK. SANTA CLARA, CA, U.S.A. National semiconductor
corporation. 1981.
Monitoreo remoto de los signos vitales
http//www.dciem.ca/DCIEMlbus-opNSM-e.html
OGATA KATSUHIKO. Ingeniería de control moderno. Prentice-Hall. 1985.
Page 66
61
Optoelectonica device data. Phoenix, AZ, U.S.A.: motorola semiconductor
products, Inc. 1983.
SODI PALLARES DEMETRIO. Electrocardiografía clínica análisis deductivo.
Instituto nacional de cardiología. 1983.
TTL Databook. Santa Clara, CA, U.S.A.: national semiconductor corporation.
1981.
Page 67
62
LISTA DE COMPONENTES
R = 8.2MM
Rl=R4=R7=R8=RlO=R11=Rl6=R19=1MR
R2=R5=lOOR
R3=R6=680
R9 = 6852
RI2 =R15=390KQ
RI 3 = 3.3MR
RI4 = 47OKQ
RI7 = 1.5MiI2
RI8 = 78OKQ
R20 = 9OOK0
R22=R28=R29=47KQ
R24 = 22w
R25 = 18OKQ
R26 = 27OKQ
R27=12KQ
R34 = 15Ksz
R31 = IOOKQ
R34 = 15KQ
Pl =2om
P2 = 47oKQ
P3 = 2oKi-I
Cl = C2 = IOpF
C3 = C4 = 0.56qF
Page 68
63
C5 = 2.2 qF
C6 = 4.777F
C7 = 3.3pF
C8 = IpF
Cl1 = Cl2 = Cl3 = MCI776C
Cl4 = Cl5 = Cl6 = TL081
Cl7 = MOC81 ll