UNIVERSIDAD NACIONAL DE INGENIERIA FACULTAD DE INGENIERIA CIVIL TORSION Y DISTORSION EN VIGAS DE PUENTES TESIS PARA OPTAR EL TÍTULO PROFESIONAL DE INGENIERO CIVIL ANGEL ALEJANDRO JUNES PEREZ LIMA – PERU 2009
Transcript
UNIVERSIDAD NACIONAL DE INGENIERIA
FACULTAD DE INGENIERIA CIVIL
TORSION Y DISTORSION EN VIGAS DE PUENTES
TESIS PARA OPTAR EL TÍTULO PROFESIONAL DE
INGENIERO CIVIL
ANGEL ALEJANDRO JUNES PEREZ
LIMA – PERU
2009
DEDICATORIA
RESUMEN
INTRODUCCION
CAPITULO I
FLEXO-TORSIÓN DE VIGAS DE PARED DELGADA DE SECCIÓN ABIERTA.
En este capítulo se hará un breve repaso sobre las principales teorías
desarrolladas en el estudio de la flexión y torsión de vigas. En la primera parte,
se revisa los resultados de la teoría de vigas relacionados con la flexión
transversal y distribución de esfuerzos cortantes en vigas de pared delgada de
sección abierta. En la segunda parte se presentan los resultados de la teoría de
torsión de un eje circular y de la teoría de torsión de Saint Venant (1850) para
barras cilíndricas incluyendo las de sección abierta de pared delgada sin
restricción al alabeo. Finalmente en la tercera parte se realiza una descripción
detallada de la Teoría de Vlasov (1961) para el caso de la flexo - torsión de una
viga de paredes delgadas de sección abierta considerando la existencia de la
restricción al alabeo (warping).
1.1 Flexión transversal de vigas de paredes delgadas de sección abierta
En esta sección se presentará el caso de vigas de sección transversal abierta de
paredes delgadas (vigas I, vigas canal U, etc.) sujetas a flexión transversal. Se
presentarán expresiones para el cálculo de los esfuerzos normales y cortantes.
Los siguientes resultados están basados en la Teoría de Bernoulli – Euler para la
flexión de vigas, conocida como “Ley de las secciones planas”, considera que las
deformaciones longitudinales en una fibra de la sección son proporcionales a la
distancia al eje neutro.
1.1.1 Distribución de esfuerzos cortantes y normales.
1.1.1.1 Distribución de esfuerzos normales.
La distribución de esfuerzos normales debido a la flexión utilizando las relaciones
de la teoría clásica de vigas, se define como:
yx
z
xx yy
M xM y
I I (1.1)
Donde: Mx y My son los momentos flectores producidos por las fuerzas Fx y Fy; Ixx
e Iyy son los momentos de inercia de la sección respecto a los ejes x e y.1.1
(a) (b)
Figura 1.1 Distribución de los esfuerzos normales en una viga de pared delgada
para (a) la flexión respecto al x, y (b) flexión respecto al eje y.
1.1.1.2 Distribución de esfuerzos cortantes.
Considerando un elemento de la sección transversal, tal como se muestra en la
figura 1.2:
Figura 1.2. Elemento infinitesimal de la pared de una viga
Del equilibrio del elemento se obtiene la siguiente ecuación:
0 0d d d dq
t t ó tdz dz dz dz
(1.2)
Donde: es el esfuerzo cortante; , es el esfuerzo normal; t , es el espesor de
la pared y; q, es el flujo de corte en la sección. De esta ecuación se deduce la
siguiente expresión:
0
0
s
s
q q t dsz
(1.3)
Para una sección transversal referida a un sistema de coordenadas xy,
conociendo además que la variación del esfuerzo normal “s” es lineal, se deduce
que:
y x
xx yy
F Fy x
z I I
(1.4)
Introduciendo (1.4) en la ecuación (1.3), resulta:
0 0
0
s sy x
s sxx yy
F Fq q ytds xtds
I I (1.5)
Las integrales representan los momentos estáticos del segmento de área
respecto a los ejes “x” e “y”, y son denotadas por Sx y Sy; entonces:
0
y x
x y
xx yy
F Fq q S S
I I (1.6)
La ecuación anterior define a la distribución del flujo de corte para el caso de no
existencia de restricción al alabeo. Si la sección transversal es abierta, entonces
se toma como punto de inicio de integración a un extremo libre, donde el flujo de
corte es nulo, en consecuencia:
0
0extremo
q q (1.7)
El esfuerzo cortante en relación al flujo de corte producido:
.q t (1.8)
Observando las ecuaciones derivadas para los esfuerzos cortantes, se nota que
estos esfuerzos actúan en la dirección paralela al contorno de la sección
transversal. En el caso de la flexión, los esfuerzos cortantes son constantes en
el espesor de las paredes. Los esfuerzos cortantes varían de acuerdo al
momento estático del segmento de área analizado; por ejemplo, para una viga
de sección tipo C como la que se muestra en la figura 1.3, los esfuerzos
cortantes producidos por una carga vertical variarán de forma lineal en los
elementos horizontales y en forma cuadrática en los elementos verticales.
Figura 1.3. Distribución del flujo de corte en una viga de sección tipo C
Definición: Centro de Corte
El centro de Corte se define como el punto en la sección transversal por el cual
las cargas externas transversales (reacciones incluidas) deben de atravesar,
para que no exista rotación de la misma, es decir, la viga estará en la condición
de flexión pura y la resultante de los esfuerzos cortantes pasará a través de
dicho punto.
Para el cálculo del centro de corte, primero se procede a considerar los efectos
de las fuerzas cortantes Fx y Fy por separado. La distribución de esfuerzos
cortantes producidos por cada una de estas fuerzas cortantes es estáticamente
equivalente a una fuerza que actúa en la dirección de la fuerza cortante que lo
produce. Evaluando el momento que produce estas fuerzas equivalentes
respecto a un punto, permite calcular las líneas de acción de dichas fuerzas. La
intersección de las líneas de acción de las dos resultantes es el Centro de Corte
de la sección transversal.
En la figura 1.4 se observa una sección transversal abierta cargada en el
centroide con dos fuerzas transversales Fx e Fy. Debido a la simetría de la
sección transversal respecto al eje x, el centro de corte se ubica sobre dicho eje
por lo que la fuerza Fx produce únicamente flexión. Por el contrario, la fuerza Fy
no pasaría por el centro de corte por lo que produciría torsión además de la
2
y
f
xx
F hq A
I
2
y
f
xx
F hq A
I
2
8
y w
xx
F t hq
I
flexión, siendo M = Fy.xs el momento torsor actuante. El centro de corte se ubica
en las coordenadas xs, ys respecto al centroide de la sección.
Figura 1.4. Sección Transversal Abierta
1.2. Torsión de un eje circular
Considerando un cilindro de longitud (l), con una de sus bases fijada al plano xy,
mientras que la otra base (en el plano z = l) está bajo la acción de un par cuyo
momento está a lo largo del eje z.
La viga se torsiona, y en consecuencia las generatrices del cilindro se deforman
como curvas helicoidales, tal como se observa en la Figura 1.5. Por simetría,
secciones planas normales al eje z permanecen planas después de la
deformación y la acción del par se reduce a rotar cada sección en un ángulo .
Figura 1.5. Barra circular
La cantidad de la rotación depende de la distancia de la sección existente entre
la sección y la base (z=0) y, considerando que las deformaciones son pequeñas,
se asume que es proporcional a z. Así:
z (1.9)
Donde es el giro por unidad de longitud, o desplazamiento angular relativo.
Secciones trasversales permanecen planas, desplazamiento longitudinal a lo
largo de z es nulo.
Figura 1.6. Sección Transversal de la barra circular.
De la figura 1.6, el campo de desplazamientos, para un ángulo pequeño, se
define con las siguientes relaciones:
0u y v x w (1.10)
Los esfuerzos asociados a este campo de desplazamientos, según las
ecuaciones constitutivas, se definen como:
0xx yy zz xy
;
;zy zx
G x G y ; (1.11)
Las condiciones de borde sobre la superficie lateral, determinan que:
0ij jn (1.12)
En el extremo, z = l, se de cumplir que:
i
iij j
T n
Estos esfuerzos cortantes dan como resultado un momento torsor, Mz
2 2
0
z zy zxM x y dxdy
G x y dxdy G I
(1.13)
Donde:
4
0
2o
rI
, es el momento polar de inercia de un circulo de radio, r0.
Considerando la expresión (1.9) se puede deducir que el ángulo de giro debido a
un momento torsor en el extremo de la viga z = l, es:
0
zM l
GI (1.14)
El vector esfuerzo: ˆ ˆ ˆz
zx zyT i j
, actuando en cualquier sección “z” =
constante, y que se encuentra sobre el plano xy, se puede escribir como:
ˆ ˆ ˆz
T G iy jx
(1.15)
Donde: ˆz
T
es normal al radio vector ˆ ˆr̂ xi yj en el punto (x,y), ya que el
producto escalar siguiente, es nulo:
ˆ ˆ. 0z
T r
(1.16)
La magnitud del esfuerzo en el punto (x,y): 2 2 2 2ˆ
z
zx zyT G x y G r
.
El máximo esfuerzo actúa en el contorno del cilindro y tiene por valor 0
G r . Ver
figura 1.7.
Figura 1.7. Distribución de los esfuerzos cortantes en una viga de sección
circular
Como se acaba de demostrar, los esfuerzos cortantes actuantes en cualquier
punto de la sección transversal en la barra circular son ortogonales al radio
vector “r” y proporcionales a su longitud y al ángulo de giro, tomando su máximo
valor en el contorno del cilindro. La superficie lateral de la barra está libre de
esfuerzos cortantes. Esta teoría fue desarrollada por Coulomb (1784).
1.3. Torsión de Barras Cilíndricas
Para barras cilíndricas con secciones transversales diferentes al círculo, las
secciones transversales ya no permanecen planas, se alabean. Navier (1864)
trató de aplicar la teoría de Coulomb para el caso de barras no circulares,
llevando a conclusiones erróneas. Esto debido a que, si consideramos los
esfuerzos cortantes aún normales al radio vector OA que parte del centro de la
sección hacia el contorno (Figura 1.8) y descomponiéndolo en sus dos
componentes: normal y tangencial al contorno (xz
y yz
); es evidente que debe
existir un esfuerzo complementario, yz
, en la superficie lateral de la barra que
equilibre la componente normal del esfuerzo cortante, lo que contradice a la
suposición de que en la superficie lateral de la barra no debe existir esfuerzo
alguno.
Figura 1.8. Esfuerzo cortante en una barra cilíndrica considerándolo
perpendicular al radio OA
Es por esto que se asume un campo de desplazamiento similar al de la barra
circular, pero esta vez con desplazamientos longitudinales paralelos al eje de la
barra “z”. Estableciéndose las siguientes relaciones:
,u zy v zx w x y (1.17)
El campo de esfuerzos estará dado por:
0
zy zx
xy yy zz xy
G x G yy x
(1.18)
Ecuaciones de equilibrio
xyxx xz
xF
x y z
yx yy yz
y
zyzx zz
z
Fx y z
Fx y z
(1.19)
Las ecuaciones de equilibrio (1.19) estarán satisfechas, si ,x y satisface la
ecuación:
2 2
2
2 20
x y
(1.20)
La cual se debe de cumplir en toda la sección del cilindro.
Si el campo de esfuerzos satisface las condiciones de borde en la superficie
lateral del cilindro, ˆ 0xy
T
, entonces se debe de cumplir:
0zx x zy yn n (1.21)
La fuerza resultante en la dirección x, esta dado por:
0x zx
R
R dxdy (1.22)
Similarmente, se demuestra que:
0y zy
R
R dxdy (1.23)
De las ecuaciones (1.22) y (1.23) se afirma que en el extremo de la barra no
existe fuerza resultante actuante en ambas direcciones. Sólo nos queda decir
que los esfuerzos cortantes no nulos son estáticamente equivalentes a un par
torsor, Mz, igual a:
dA
dA
z zy zx
R
R
M x y
G x x y yy y
(1.24)
La expresión anterior se puede reescribir de la siguiente manera:
z
M G J (1.25)
Donde:
dAR
J x x y yy y
“J” se define como la constante de rigidez a la torsión.
La ecuación (1.25) establece la relación entre el momento torsor aplicado y la
cantidad de giro en la barra cilíndrica.
A manera de ejemplo, se tiene una viga de sección transversal elíptica tal como
se aprecia en la figura 1.9
Figura 1.9 Sección transversal elíptica
Para satisfacer las ecuaciones de equilibrio (1.19), se define la función de tal
manera que cumpla con (1.20):
2 2 2 2
2 2
2 2 2 2
1
2
a b a bx y
a b a b
(1.26)
De acuerdo a la ecuación (1.24), el momento torsor es igual a:
3 3
2 2dA
z zy zx
R
G a bM x y
a b
(1.27)
Donde la rigidez torsional de la barra es igual a:
3 3
2 2
Ga bJ
a b
(1.28)
Y la distribución de esfuerzos cortantes (figura 1.10) de acuerdo a (1.18) es:
2 2
2 2 2 2
2 2zx zy
G a y G b x
a b a b
(1.29)
Siendo máximo en el punto de intersección de la elipse con el eje mayor y
mínimo en el punto de intersección con el eje menor.
2 2
2 2 2 2max min
G a b G b a
a b a b
(1.30)
Figura 1.10. Distribución de los esfuerzos cortantes en una viga de
sección elíptica
Finalmente la función de alabeo de la sección trasversal elíptica definida por
(1.17) es:
2 2
3 3
T b aw xy
G a b
(1.31)
Usando las ecuaciones desarrolladas anteriormente, se puede hallar una
solución aproximada de la distribución de esfuerzos para vigas de paredes
delgadas en torsión pura. Considerando que las paredes son delgadas, es decir,
su espesor “t” es mucho menor en relación a su longitud “b”, la distribución de los
esfuerzos cortantes a través del espesor de la pared, tal como se muestra en la
figura 1.11, tiene una ley de distribución de acuerdo a la ecuación (1.32).
Figura 1.11: Distribución de los esfuerzos cortantes en la pared de una
viga debido a la torsión
2
TM
xJ
(1.32)
La constante torsional J que aparece en la ecuación (1.32) para una viga de
sección abierta de paredes delgadas es aproximadamente igual a:
31
3S
J t ds (1.33)
Los esfuerzos cortantes debido a torsión pura varían linealmente a través del
espesor de las paredes. Como se ha visto anteriormente, estos esfuerzos
cortantes depende del espesor de la pared, tomando valores máximos en las
fibras externas de las paredes más gruesas. Así mismo, esta distribución de
esfuerzos es equivalente a pequeños momentos torsores distribuidos a lo largo
de toda la sección de la viga y son los que resisten al momento torsor aplicado
El esfuerzo cortante máximo por torsión pura es:
max max
Tt
J (1.34)
Donde: J, es la constante torsional; T, es el momento torsor actuante y; tmax, es el
espesor en la pared más gruesa de la sección transversal. Los esfuerzos
cortantes actúan de la forma como se muestra en la Figura 1.12.
Figura 1.12. Distribución de esfuerzos cortantes en una viga de paredes de
sección abierta sometida a torsión pura.
1.4 Teoría de Vlasov para torsión de vigas de pared delgada de sección
abierta con restricción al alabeo.
1.4.1 Definiciones
Se define como superficie media de la viga de pared delgada, a la
superficie que equidista de las caras mayores de las placas que
componen la viga.
Llamaremos generatrices de la superficie a las líneas rectas que
encuentran en la superficie media paralela al eje de la viga, sobre
la cual se define la coordenada z. La intersección de la superficie
media con un plano normal a las generatrices se llama “línea de
perfil o contorno” sobre la cual se define la coordenada s.
Figura 1.13. Coordenadas z y s
Figura 1.14. Superficie media de una viga de pared delgada de sección abierta
1.4.2 Hipótesis:
Las hipótesis de la teoría de vigas de sección abierta, son las siguientes:
Una viga de pared delgada de sección abierta puede ser considerada
como una cáscara de sección rígida (es decir indeformable).
Las deformaciones de corte de membrana de la superficie media,
caracterizado por el cambio del ángulo entre las líneas de las
coordenadas z y s, se asumen despreciables. Esto quiere decir que
las líneas de las coordenadas z y s permanecen ortogonales entre sí
después de la deformación.
1.4.3 Desplazamientos y Deformaciones
El desplazamiento de un punto M arbitrario de la superficie media es
naturalmente un vector.
1. El desplazamiento longitudinal, u, es positivo en Z+.
2. El desplazamiento transversal tangencial, v, a lo largo de la tangente
a la línea de perfil, es positivo cuando se incrementa en s.
3. El desplazamiento normal se denota como: w.
Estos 3 desplazamientos son funciones de z y s.
De acuerdo a la segunda hipótesis, la deformación de membrana de corte se
define como:
0u v
s z
(1.35)
Resolviendo, tenemos:
1
,
M
M
vu z s z ds
z
(1.36)
Con la ayuda de relaciones geométricas la ecuación (1.36) se transforma en:
, ( ).1 '( ) ( ) '( ) ( ) '( ) ( )u z s z z x s z y s z s (1.37)
Deformación Longitudinal:
u
z
(1.38)
, ' " " "z s z z x s z y s z s (1.39)
1.4.3.1 Área Sectorial:
Se llama área sectorial al área encerrada entre el arco M’M del perfil de la
sección transversal y las dos línea AM’ y AM, tal como se muestra en la figura
1.15. El área Sectorial es positiva si el radio normal AM se mueve en el sentido
de las agujas del reloj visto de Z-.
Figura 1.15. Área Sectorial, Definición
0
2. sectorial
s
hds A (1.40)
= es una función que depende de s
A = Polo de las áreas sectoriales
M1= Origen sectorial
1.4.3.2 Centro de Corte
Figura 1.16: Determinación del centro de corte
Usando las expresiones para los momentos estáticos y momentos de inercia:
1
1
B
B
x x x B
x xA
y y y B
y xA
I ya d ydA
I I
I xa d xdA
I I
(1.41)
El punto A se le conoce como Polo Sectorial Principal
Siendo D el centroide:
0
0
1
1
x
x A
y
y A
a ydAJ
a xdAJ
(1.42)
1.4.4 Relaciones Esfuerzo – Deformación.
De (1.39), la expresión para los esfuerzos normales es:
, ' " " "z s E z z x s z y s z s (1.43)
Si las funciones x(s) e y(s) están referidos a un eje de coordenadas cuyo origen
se ubica en el centroide de la sección; y la función s tiene como polo al
centro de corte, entonces la ecuación (1.43) se puede reescribir de la siguiente
forma:
y x
y x w
M MN Bx y
A I I I (1.44)
Donde:
1A
x x
A
y y
A
A
N dA EA
M ydA EI
M xdA EI
B dA EI
(1.45)
En la ecuación anterior B es el Bimomento y se define como la fuerza interna
resultante del alabeo. El Bimomento es un sistema estáticamente equivalente a
cero. I
es el momento de inercia sectorial y se define como:
2
A
I dA
(1.46)
La ecuación (1.44) describe la ley general para el esfuerzo normal para la
sección z= cte. de una sección transversal abierta. Los tres primeros términos de
la ecuación (1.44), coinciden con las expresiones conocidas de la Resistencia de
Materiales y están basadas en la ley de secciones planas; el cuarto término
determina los esfuerzos normales que aparecen debido a que la sección
transversal no permanece plana.
y x
y x w
M MN Bx y
A I I I
Deformación Flexión Flexión Torsión
Axial OXZ OYZ
Ley de Bernoulli – Navier Alabeo Sectorial
(Secciones planas)
Ley de las Áreas Sectoriales
La ley de las secciones planas (Ley de Euler- Bernoulli) es un caso particular de
esta ley generalizada (Ley de Vlassov)
Se asume que los esfuerzos normales son constantes a lo largo del espesor de
la pared de la viga, véase la figura 1.17 (a); y los esfuerzos tangenciales varían
de acuerdo a una ley trapezoidal a lo largo del espesor de la viga. Véase la
figura 1.17 (b).
(a) (b)
Figura 1.17: Variación de los (a) esfuerzos normales y (b) esfuerzos tangenciales
Estos esfuerzos tangenciales son equivalentes a considerar dos sistemas
esfuerzos tangenciales: En el primer sistema, los esfuerzos tangenciales varían
a lo largo del espesor de la pared de acuerdo a un diagrama triangular
asimétrico, y producen pares torsores que actúan a lo largo de la pared de la
viga, véase la figura 1.18. Estos esfuerzos cortantes se le conocen como
esfuerzos cortantes primarios o de torsión pura.
Figura 1.18: Esfuerzos tangenciales que varían de acuerdo a un diagrama
triangular asimétrico.
Se reemplaza el momento torsional por unidad de sección (el cual depende de la
diferencia de los esfuerzos tangenciales a puntos extremos de la pared) por una
distribución de los momentos torsionales HK(z) sobre la sección transversal y
equivalente al momento torsional por torsión pura.
K DH GJ (1.47)
Donde:
31
3DJ d (1.48)
La expresión para el cálculo del esfuerzo cortante está dado por:
kH
J (1.49)
En el segundo sistema, los esfuerzos tangenciales son constantes e iguales a la
semisuma de 1 y
2 , los cuales conllevan a que aparezcan flujos de corte que
actúan a lo largo de la tangente al arco del contorno, véase la figura 1.19. A
estos esfuerzos cortantes se les conoce como esfuerzos cortantes secundarios
Figura 1.19: Esfuerzos tangenciales constantes a lo largo de la pared de una
viga de sección abierta
El flujo de corte T secundario producido por estos esfuerzos cortantes
constantes se calcula por la siguiente ecuación:
T E S
(1.50)
Sw(s), es el momento estático sectorial y está definida por:
0
s
S dA (1.51)
El momento torsor secundario H
originado por estos flujos de corte es igual:
H EI B
(1.52)
La suma de los momentos torsores primario y secundario debe ser igual al
momento torsor externo MT:
k T
H H M (1.53)
Combinando las ecuaciones (1.50) y (1.52), la expresión para los esfuerzos
tangenciales es:
1T H
S sI
(1.54)
Donde es el espesor de la pared.
La expresión general para el cálculo de esfuerzos cortantes, considerando no
solo cargas torsionantes sino también cargas transversales es:
1 yx
y x
y x
QQ HS s S s S s
I I I
(1.55)
Donde: Qx y Qy son fuerzas cortantes, es el espesor de la pared
Esta ecuación es una generalización para la determinación de los esfuerzos
cortantes debido a flexo-torsión de la viga.
1.4.5 Ecuación Diferencial de Equilibrio de una barra.
En la Figura 1.20, del equilibrio propuesto se obtiene las siguientes relaciones:
Figura 1.20. Equilibrio en un elemento de viga de longitud dz
0 0
0 cos 0
0 sin 0
z L K
L
dx
x
L
dy
y
L
Z dzds q T T dzz
X ds dz q dzz
y ds dz q dzz
0 sin cos 0sc x y k
Ld
M dz x a y a ds H dz mdzz
(1.56)
Utilizando las expresiones (1.44) y (1.55) para el cálculo de los esfuerzos
normales y cortantes y la ecuación (1.47), la ecuación (1.56) se transforma en:
z L K
iv Zx x L L K K
L
iv Zy y L L K K
L
iv Zd L L K K
L
EA q T T
pEI q T x T x x ds
z
pEI q T y T y y ds
z
pEI GJ m T T ds
z
(1.57)
Si solo se considera como carga: las fuerzas transversales qx(z) y qy(z) y el
momento m(z), entonces la ecuación (1.57) se transforma en:
0 ( )
( )
( )
( )
iv
y x
iv
x y
iv
d
EA a
EI q b
EI q c
EI GJ m d
(1.58)
Las 3 primeras ecuaciones diferenciales de (1.58) ((a), (b) y (c)), conocidas en la
teoría clásica de vigas, son las que gobiernan la extensión longitudinal y la
flexión transversal alrededor de los ejes principales de la sección transversal de
la viga. La cuarta ecuación diferencial de (1.58) (d) es la que gobierna la torsión
con alabeo restringido para una viga de paredes delgadas de sección abierta.
Tal como se observa en dicha ecuación diferencial, posee derivada cuarta, es
decir que, a diferencia de la teoría de Saint Venant, la variación del ángulo de
torsión no es uniforme a lo largo de la viga,
La condiciones de borde que se debe de considerar para resolver la ecuación
diferencial (1.58)(d), considerando los diferentes tipos de apoyo se presentan a
continuación en la siguiente tabla.
Tabla 1.1 Condiciones de Borde a considerar para el caso de torsión con alabeo
restringido.
Tipo de Soporte Condición de Borde
Simple 0, 0
Rígido 0, ' 0
Libre 0, 0T
M
CAPITULO II
FLEXO - TORSIÓN DE VIGAS DE PARED DELGADA DE SECCIÓN
CERRADA.
En este capítulo se presentará el caso de vigas de sección transversal cerrada
de paredes delgadas, unicelulares como multicelulares, sujetas a flexión
transversal y a torsión. En la primera parte se describirá brevemente las
consideraciones que se han de tener para analizar la viga a flexión y para el
cálculo de los esfuerzos longitudinales, ya que se realiza de manera similar al
caso de vigas de sección abierta. En cambio, se pondrá un mayor énfasis en el
cálculo de las fuerzas cortantes donde se discutirá la metodología para su
cálculo.
En la segunda parte, se estudiará el caso de las vigas sometidas a torsión. Se
hará una descripción de la Teoría de Saint Venant para barras cilíndricas con
cavidades y su aproximación a vigas cerradas de paredes delgadas. Luego se
hará una descripción de la formulación de Braedt para vigas de sección cajón
unicelular y su extensión a vigas de sección multicelular. Finalmente se hará una
breve mención al caso de torsión de vigas con restricción al alabeo, que a
diferencia de vigas de sección abierta, se puede considerar despreciables los
efectos que pueda generar.
2.1 Flexión Transversal
Para el caso de flexión de vigas de pared delgada y sección cerrada, se
considera que se cumplen las suposiciones de Bernoulli – Euler, es decir, se
asume que las secciones permanecen planas después de aplicadas las cargas y
que las deformaciones por corte transversal son despreciables.
2.1.1 Esfuerzos Normales
La distribución de esfuerzos normales debido a la flexión, utilizando las
relaciones de la teoría clásica de vigas, se define como:
yx
z
xx yy
M xM y
I I (2.1)
Donde: Mx y My son los momentos flectores producidos por las fuerzas Fx y Fy; Ixx
e Iyy son los momentos de inercia de la sección respecto a los ejes x e y.
2.1.2 Esfuerzos Cortantes
Flujo de Corte
Utilizando la ecuación (1.29) derivada en el capítulo 1, la cual define el flujo de
corte en la viga:
y x
i x y
xx yy
F Fq q S S
I I (2.2)
Donde: Fx y Fy son las fuerzas verticales en dirección de los ejes x e y; Ixx e Iyy
son los momentos de inercia de la sección respecto a los ejes “x” y “y”; Sx e Sy
son los momentos estáticos respecto a los ejes “x” y “ y”.
A diferencia de lo que ocurre en secciones abiertas, en las secciones cerradas
unicelulares el flujo de corte inicial qi es diferente de cero y debe determinarse.
En secciones cajón simétricas, qi toma el valor de 0 en el punto en que el eje de
simetría corta a la sección. En el caso de que no existe un eje de simetría, se
debe de introducir un corte, con lo cual el flujo de corte q0 queda definido como si
se tratara de una viga de sección abierta, haciendo que qi = 0 en el punto de
corte. Sin embargo, al hacer esto se genera desplazamientos relativos
longitudinales en los extremos del punto de corte. Introduciendo un flujo de corte
desconocido X de tal manera que se compatibilicen los desplazamientos
longitudinales en el punto de corte, se establece la ecuación de continuidad en el
punto de corte:
10 11
0X (2.3)
Donde:
10 , es el desplazamiento relativo de los extremos en el punto de corte;
debido a q0, y se puede calcular mediante el principio de trabajo virtual al
aplicar un flujo de corte unitario en los extremos de corte, obteniéndose la
siguiente expresión:
0
10
A
qds
Gt (2.4)
11 , es el desplazamiento relativo de los extremos en el punto de corte;
debido a un flujo de corte unitario, se expresa así:
11
1
A
dsGt
(2.5)
Figura 2.1. Desplazamiento relativo de los extremos en el punto de corte
Calculado el flujo de corte desconocido X, el flujo de corte total es igual a la
siguiente expresión:
0
q q X (2.6)
Para secciones cajón multicelular el flujo de corte es un sistema hiperestático de
grado igual al número de celdas. Para resolver este sistema es necesario
agregar tantos cortes como numero de celdas existan, de tal manera que se
pueda calcular el flujo de corte q0 haciendo que qi = 0 en los puntos de corte.
Introduciendo en cada celda flujos de cortantes constantes desconocidos Xi y
estableciendo las ecuaciones de compatibilidad, los flujos de cortes Xi pueden
ser calculados resolviendo el siguiente sistema de ecuaciones:
11 1,2 2 10
1, 1 , 1 1 0
1. 1 1 0
i
i i i ii i i i i i
n n n nn n n
X X
X X X
X X
(2.7)
Donde:
0i , es el desplazamiento relativo de los extremos en el punto de corte
debido a q0 para la celda i
0
10
i
qds
Gt (2.8)
ii , es el desplazamiento relativo de los extremos en el punto de corte
debido a un flujo de corte unitario.
1
ii
i
dsGt
(2.9)
ij , es el desplazamiento relativo en el corte de la celda j debido a un
flujo de corte unitario en la celda i, y viceversa, y donde la integral solo se
realiza en la pared común de las celdas i y j.
,
1ij
i j
dsGt
(2.10)
Finalmente, el flujo de corte total para una viga cajón multicelular es:
0
1
n
T ii
q q X
(2.11)
Definido el flujo de corte para una viga de sección unicelular o multicelular, el
valor del esfuerzo cortante en las paredes de la sección se define como:
q
t (2.12)
Donde q es el flujo de corte y t es el espesor de la pared.
Centro de Corte
Tal como se ha definido para el caso de vigas de sección abierta, el centro de
corte para vigas de sección cerrada tiene el mismo sentido, es decir, es el punto
en la sección transversal por lo cual atraviesa la resultante de esfuerzos
cortantes. Esto significa que si la fuerza transversal pasa por este punto, la viga
estará sometida a flexión pura, sin rotación por torsión.
El flujo de corte q que aparece en las paredes de la sección transversal produce
un sistema de cargas actuantes, las cuales son equivalentes a una fuerza y un
momento resultante. Por ejemplo en la figura 2.2 se tiene una sección cajón de
dos celdas. Para localizar el Centro de Corte, es necesario primero calcular el
flujo de corte como resultado de cargas cortantes Fx e Fy, para ello se realiza dos
cortes en los centros de las paredes superiores de cada celda y luego introducir
los flujos constantes por conocer X1 y X2. Sin embargo ya que la sección es
simétrica con respecto al eje X, el centro de corte se ubica sobre este eje y sería
necesario solamente conocer el flujo de corte como resultado de una carga
vertical Fy. La distribución de los flujos de corte X1, X2 y q0 se muestra en la
Figura 2.3 (a) y (b).
Figura 2.2. Viga cajón de 2 celdas
Utilizando el sistema de ecuaciones de compatibilidad (2.7) se calculan los flujos
de corte desconocidos X1 y X2.
11 11 12 21
2( ) 2( )a h b h h
Gt Gt Gt
(2.13)
2
0
10
14
y
xx
Fq bhds
Gt G I (2.14)
2
0
20
24
y
xx
Fq ahds
Gt G I (2.15)
Escribiendo el sistema de ecuaciones (2.7):
2
1 2
2
2 2 20
2
4
2
4
y
xx
y
xx
Fa h h bhX X
Gt Gt G I
Fb hh ahX X
Gt Gt G I
(2.16)
Resolviendo el sistema (2.16) se calcula los flujos de cortes constantes X1 y X2:
2
1
2
2
21
4 4
21
4 4
y
xx
y
xx
F th b b h ahX
Ia h b h h
F th a a h bhX
Ia h b h h
(2.17)
El sistema de fuerzas verticales resultantes del flujo de corte resultante de la
combinación de q0, X1 y X2 debe ser igual a la carga vertical Fy. El momento
resultante de las fuerzas resultantes respecto al punto medio de la pared
intermedia es:
2
2 2
1 22 2 3 3 ( )
12 y
h tM ahX bhX b a h a b F e (2.18)
Donde e es la excentricidad de la fuerza Fy.
El centro de corte está localizado en eje a una distancia de la pared vertical
intermedia e:
y
Me
F (2.19)
Figura 2.3. (a) Distribución de los flujos de corte Xi desconocidos (b) Distribución
del flujo de corte q0
2.2 Torsión. Formulación de Braedt para secciones del tipo cajón
2.2.1 Cajón Unicelular
(a) (b)
Figura 2.6: (a) Sección Cajón del tipo unicelular (b) Esfuerzos cortantes en un
elemento de pared de la sección
Para el caso de un tubo de pared delgada cuyo espesor t puede variar en la
sección transversal, a lo largo de s, el equilibrio en el sentido vertical es:
. d d
. d .
t t t
t t
Luego: d .t 0 ; entonces:
.t = constante = q = flujo de corte (2.20)
Figura 2.7. Esfuerzos cortantes para una viga de sección cerrada.
Tomando como polo del radio vector r en el centro de torsión, el momento torsor
resultante del flujo de corte es igual a:
d ds
1d
2
2
T t t
C C
t CC
T C
M r q s q r
r s A
M A q
2
T
C
Mq
A (2.21)
Las deformaciones cortantes en las paredes del tubo se muestran en la
siguiente figura:
Figura 2.8. Deformaciones cortantes de membrana
Deduciéndose que:
Deformación Cortante Total 1 2
Deformación Cortante debido a la torsión 1
d . .d
d dx
t t
t
v r xr
x
Donde es el giro por unidad de longitud
Deformación Cortante debido al alabeo 2
d
d
v
x
Donde v es el desplazamiento longitudinal del alabeo
Entonces:
d
dt
vr
s (2.22)
El flujo de corte resulta: .t
dvq t G t Gt r
ds
Integrando a lo largo del contorno del tubo:
0 0 0 0
d
d
d dd d d
d d
t
s s s s
t t
q vr
Gt s
q v vds r s r s s
Gt s s
0 0 0
ds s
t
qv v ds r s
Gt (2.23)
Si la integración se realizara a través de todo el contorno de la sección, es decir
v – v0 = 0, entonces:
d .2 0
dd
2 2
c
c c
qs A
Gt
q ss q
t t
A G A G
(2.24)
Pero: 2
c
Mq
A ; entonces:
2
2
T
d4
4ó donde J
d
T
c
cT
T
Md
sdzA G
t
AMd
sdz GJ
t
(2.25)
Combinando las ecuaciones (2.23), (2.21) y (2.25) se obtiene:
0 0
s dsv v
ds t
t
(2.26)
Donde:
0
s
tr ds (2.27)
La expresión entre paréntesis de la ecuación (2.26) se le conoce como la función
de alabeo para una sección cajón:
0
ˆs ds
ds t
t
(2.28)
Para una sección transversal tipo cajón tal como se aprecia en la figura 2.9(a), la
distribución de la función del alabeo está definida por sus valores 1̂ y
2̂ .(figura 2.9 (b)).
1
2 1
ˆ2 4
ˆ ˆ2 2
t T
t
T
v
e a J
bt
Jab
at
(2.29)
Figura 2.9. (a) Sección Transversal tipo Cajón (b) Distribución de la función del
alabeo ̂
2.2.2 Sección Cajón Multicelular
(a) (b) (c)
Figura 2.10. (a) Tubo con un alma intermedia (b) Unión de almas (c)
Flujo de corte en las 2 celdas.
De acuerdo a la figura 2.10, del equilibrio de flujos de corte en el punto B, se
obtiene:
1 2 3 3 1 2
q q q o q q q (2.30)
Y en el punto A:
1 2 3 3 1 2
q q q o q q q (2.31)
En cada celda se debe de cumplir la siguiente condición de equilibrio:
2
d 1,2T
i
i
Ms A i
K (2.32)
Donde Ai es el área encerrada por la línea media de cada celda i, K es la rigidez
torsional de la viga multicelular y MT es el momento torsor aplicado. Por
compatibilidad, la variación del ángulo a lo largo de la longitud de la viga es
igual tanto para cada celda i como para toda la sección. Es decir:
T
celda iT
Md d
dz dz GJ
(2.33)
Debido a que el flujo de corte es constante, entonces:
s
d d ds
ParedesCeldai Celdai
qqs s s
t t (2.34)
Es decir para la celda 1:
1 3 3 1 2
1
1 1 2
1
1 2
1 1
d , pero: ,
d
dd
BAAB
BAAB
BA
ds dss q q q q q
t t
ds dss q q q
t t
s dss q q
t t
Igualmente para la celda 2:
2 1
2 2
dd
AB
s dss q q
t t
Entonces utilizando las condiciones de equilibrio se llega al siguiente sistema de
ecuaciones:
1 2 1
1
1 2 2
2
2d
2d
T
BA
T
AB
Ms dsq q A
t t K
Mds sq q A
t t K
(2.35)
Haciendo un cambio de variable 2
T i
i
T
M qq
J , el nuevo sistema sería:
1 2 1
1
1 2 2
2
d
d
BA
AB
s dsq q A
t t
ds sq q A
t t
(2.36)
Resolviendo la ecuación (2.36) se determinan los valores para i
q . Se debe
entonces de cumplir el equilibrio entre las fuerzas internas y actuantes, y
utilizando el cambio de variable 2
T i
i
T
M qq
J se tiene:
2
1
2
1
2
4
i i Tn
T i in
A q M
J A q
(2.37)
Y el flujo de corte en cada celda queda expresado por la siguiente ecuación:
2
1
2
T
i i
i in
Mq q
Aq
(2.38)
Siguiendo este procedimiento podemos generalizar para una sección multicelular
formado por “n” celdas tal como se muestra en la figura 2.9:
Para la celda k se cumple que:
1 1
1 1
1
d d d d2
d d d2
B C D D
k k k k k k k
A B C C
k k k k
k k k
s s s sq q q q q q GA
t t t t
s s sq q q GA
t t t
(2.39)
Figura 2.9: Sección Transversal de una viga de “k” celdas
El sistema de ecuaciones se cumple para todo k = 1,…, n
El momento Torsor externo es igual a:
1
2n
T k kk
M A q
(2.40)
Realizando el cambio de variable:
2
k
k
qq
G (2.41)
El sistema de ecuaciones (2.39) se rescribe de la siguiente manera:
1 1
1
d d dk k k k
k k k
s s sq q q A
t t t
(2.42)
Resolviendo el sistema (2.42), se puede calcular la constante torsional para la
viga cajón multicelular de acuerdo a:
1
4n
T k kk
J A q
(2.43)
El momento torsor total es igual a:
T T
M GJ (2.44)
Y el flujo de corte en cada celda:
2 T
k k k
T
Mq G q q
J (2.45)
2.2.2.1 Ejemplo de Aplicación
Se tiene la sección transversal de una viga multicelular, tal como se observa en
la figura 2.10
Figura 2.10. Sección Transversal de una viga de dos celdas
Del sistema de ecuaciones, calculamos k
q
1 2
1 2
21
22
a h hk q q ah
t t
a hhk q q bh
t t
Resolviendo el sistema anterior:
2
2 21
2
2 22
22
4 4
22
4 4
ht a b h bhb h aht bh tq
a h b h h a h b h h
ht b a h aha h bht ah tq
a h b h h a h b h h
La rigidez torsional es igual a:
2 2 2
21 1 2 2
84
4 4 3T
h t ab a b h a b hJ A q A q
ab a b h h
Obteniéndose como resultado los flujos de corte para cada celda:
1 2 2
2
4T
a b h bhq M
h ab a b h a b h
2 2 2
2
4T
b a h ahq M
h ab a b h a b h
2.3 Flexo-torsión de vigas de pared delgada de sección cerrada con
restricción al alabeo.
Benscoter (1951) desarrollo una teoría general para el análisis de los esfuerzos
secundarios producidos debido a la torsión no uniforme de vigas de sección
cajón, siendo posteriormente extendida para el análisis de vigas cajón
multicelular.
Para una sección cajón simple se tienen las siguientes suposiciones.
1. Las sección transversal es constante y indeformable en su propio plano
2. Los esfuerzos son constantes a través del espesor de las paredes.
3. El desplazamiento de alabeo se asume que tiene una distribución
transversal básica tal como ocurre en la teoría de Saint Venant.
2.3.1 La Ecuación Diferencial del Alabeo Torsional
La variación del alabeo es definida por la función z
f
, entonces la función de
alabeo será:
ˆw f (2.46)
Donde ̂ es definida por (2.28). El esfuerzo normal entonces se define de la
siguiente manera:
dw
Edz
(2.47)
Y el esfuerzo cortante es:
dw dv
Gds dz
(2.48)
Siendo v h , h es la distancia del centro de corte a la recta tangente al perfil
de la sección transversal.
En un elemento infinitesimal de la viga, se debe de cumplir el equilibrio de las
fuerza internas, es decir:
0d d
dz ds
(2.49)
La ecuación diferencial que gobierna este estado de deformación de alabeo
restringido, se escribe a continuación:
2 2 2
2 20
w w vEt Gt Gt
z s s z
(2.50)
Utilizando las funciones f y θ, la ecuación anterior puede ser escrita de la
siguiente manera:
3
3ˆ d T
d f dfEI GI M
dzdz (2.51)
23
ˆ
3 2ˆ
'. T
d T
c
E I d Md dEI GI M
dz GIdz dz
(2.52)
Donde:
Segundo Momento de Alabeo:
2
ˆˆ
A
I dA
(2.53)
Segundo Momento Central de Área:
2
c
A
I h dA (2.54)
Y el coeficiente:
1 T
C
I
I (2.55)
Estas funciones f y θ, se relacionan de la siguiente manera:
C
d T df
dz GI dz
(2.56)
2.3.2. Determinación de Esfuerzos:
2.3.2.1. Esfuerzos Normales
Combinando las ecuaciones (2.46) y (2.47), el esfuerzo normal queda definido
como:
ˆE f
(2.57)
La fuerza resultante de estos esfuerzos de alabeo, el Bimomento, es igual a:
ˆ ˆˆ
A
B A EI f
(2.58)
Derivando la ecuación (2.51) y combinándola con la ecuación (2.58), se obtiene
la ecuación diferencial con B como incógnita.
2
2
2
d B dTk B
dzdz (2.59)
Donde:
ˆ
dGI
kEI
(2.60)
El esfuerzo longitudinal de alabeo es:
ˆ
ˆB
I
(2.61)
2.3.2.2 Esfuerzos Cortantes
Flujo de Corte
El flujo de corte consiste en dos partes. La primera equilibra el torque externo y
la segunda esta en equilibrio con los esfuerzos longitudinales resultantes del
alabeo.
1 2
q q q (2.62)
Flujo de Corte Primario
1 2
TM
qA
(2.63)
Donde MT es el momento torsor externo y A es el área encerrada por la línea
media de la sección cajón.
Flujo de corte secundario
ˆ
ˆ2
0 ˆ ˆ ˆ
ˆs
dBS BBdzq dA C S C
I I I
(2.64)
Donde ˆ
S
es el momento estático para una sección cajón. La constante de
integración C se obtiene por la condición de nulidad del torque producido por el
flujo de corte secundario, entonces:
ˆ
1
2A
C S hdsA
(2.65)
Para una viga cajón de sección rectangular, la constante C esta dado por:
1ˆ 1 1
5 44 3 3t v b
C A A A
(2.66)
Donde At, Ab y Av son las áreas de las paredes superior, inferior y vertical
respectivamente; y se define como:
3
3
t v
b v
A A
A A
(2.67)
La variación de ˆ
S
a lo largo de la seccion transversal se presenta en la figura
Entonces el flujo de corte total sería:
*
*
'
2
S BTq
A I
(2.68)
Se debe indicar que si bien en viga de sección abierta, los esfuerzos
secundarios producidos por la restricción del alabeo son importantes, siendo
incluso del mismo orden o superior que los esfuerzos considerados por la teoría
de Saint Venant, no sucede lo mismo en vigas de sección cerrada. En efecto,
estos esfuerzos secundarios son de un orden de magnitud inferior a los
esfuerzos de Saint Venant, por lo que para secciones cerradas, el análisis de la
torsión de secciones cerradas rigidas con restricción al alabeo no se ha
considerado analizar con mayor detalle.
CAPITULO III
EL PUENTE DE DOS VIGAS Y LOSA BAJO LA ACCION DE CARGAS DE
TORSIÓN.
3.1 Planteamiento del Problema
En el diseño de los puentes de vigas y losas, rectos y simétricos, se requiere
colocar la sobrecarga de diseño por vía de trafico en las posiciones
transversales más desfavorables, lo cual origina tener cargas actuando
asimétricamente respecto al eje del puente. El reglamento AASHTO LRFD
para el diseño de puentes (2007), trata esta situación como un problema de
distribución lateral de cargas entre las vigas que conforman la
superestructura, y presenta métodos de análisis detallados solamente para el
caso de 4 o más vigas. Para secciones transversales de una viga tipo cajón,
o puentes de 2 o 3 vigas, con un ancho “b” de la sección transversal en
relación a la luz “L” del puente, b<= 0.25 L, el Reglamento considera que se
pueden analizar como una gran viga simple sometidas a flexión y torsión,
pero no presenta mayores detalles, y lo cual puede resultar en adoptar
procedimientos muy conservadoras o deficientes en determinar los efectos
de flexión y de torsión.
En el presente capítulo se estudia con detalle el comportamiento de la
superestructura de un puente compuesto por una losa y dos vigas de
concreto, cuya sección transversal se muestran en la figura 3.1 para una luz
de 30m y un ancho de calzada de 8.30m.
Figura 3.1. Sección Transversal de un puente de dos vigas
La práctica más común, basada en el uso del factor de concentración de
cargas, es asumir que el tablero está simplemente apoyado sobre las vigas y
bajo la acción de dos camiones de diseño HS20 dispuestos en la posición
transversal mas desfavorable a 0.60m del sardinel y manteniendo su
posición dentro de cada una de las dos vías de tráfico (Figura 3.2).
Figura 3.2. Distribución de los camiones en la sección transversal
La acción de las cargas externas es equivalente a una carga centrada de 16P
para los ejes mas pesados y un momento de torsión externo igual a MT = 16P*e,
donde e es la excentricidad de la carga. Debido a esta posición transversal de
las cargas, las reacciones en cada una de las vigas serian de
1 (4 ) 2.618(4 )R P P , para la viga mas cargada y de 2 (4 ) 1.382(4 )R P P
para la viga menos cargada. De acuerdo a este criterio cada viga deberá ser
diseñada para soportar, en flexión y en corte transversal, una línea de ruedas
multiplicada por el factor R1, lo cual significa que los momentos de torsión
producidos por las cargas de torsión serian equilibrados por los flujos de corte
transversal (correspondientes a un factor ) en las vigas debido a la flexión
diferencial entre ellas. Según este criterio no se producirían esfuerzos cortantes
de torsión en las vigas.
Un modelo simple alternativo de análisis es asumir que los momentos de torsión
son tomados como torsión pura por el conjunto de dos vigas, y cuyos esfuerzos
cortantes de torsión podrían ser calculados de acuerdo a la Teoria de Saint
Venant para secciones abiertas sin restricción al alabeo.
Se tiene así dos modelos simples para determinar los esfuerzos que se
producen por efecto de las cargas de torsión anteriormente mencionadas: el
primero considera que las cargas torsionantes son tomadas por flexión y corte
transversal diferencial, el cual asume una sección transversal totalmente flexible,
produciendo esfuerzos cortantes máximos (P = 1.82 tn) de 3.0 kg/cm2 y de
flexión máxima de 53.70 kg/cm2 , mientras que según el segundo modelo solo
se producirían esfuerzos cortantes máximos de torsión de 5.2 kg/cm2, bajo la
suposición de una sección transversal rígida y torsión sin restricción al alabeo
longitudinal. La solución real será algo intermedio entre estos dos modelos
simples, y es lo que se trata de investigar en este capítulo mediante métodos de
análisis más completos como son la teoría de Vlasov (1961) para la torsión con
alabeo restringido de secciones abiertas rígidas, la teoría de placas plegadas
para estudiar los efectos de la distorsión o flexión transversal de la sección
transversal, y finalmente el método de Elementos Finitos. En el presente análisis,
a fin de facilitar la obtención de los resultados, se considera la aplicación de
cargas de torsión de variación sinusoidal sobre cada una de las vigas,
asumiendo además la existencia de diafragmas rígidos en los extremos del
puente.
3.2. Teoría de Vlasov para una sección abierta rígida de dos vigas y una
losa.
En el capítulo I se establecieron las bases y ecuaciones diferenciales que
gobiernan la Torsión de Vigas de Pared Delgada de sección abierta desarrollada
por Vlasov basada en la Ley de las Áreas Sectoriales, y la cual asume que la
sección transversal abierta es indeformable en el sentido transversal.
Las propiedades geométricas de la sección transversal se presentan en la tabla
3.1.
Asimismo, de acuerdo a lo expuesto en el capítulo I, se determina la distribución
de la función del alabeo (Tabla 3.2), basado en las aéreas sectoriales
tomando como polo el centro de corte y se presenta en la figura 3.3.
Tabla 3.1. Características Geométricas de la Sección Transversal
Tabla 3.2. Distribución de la función de alabeo
Figura 3.3. Distribución de la función de alabeo de acuerdo a la tabla 3.2.
La distribución del momento estático S a lo largo de toda la sección transversal,
calculada de acuerdo a (1.51), se muestra a continuación en la tabla 3.3 y en la
figura 3.4
Tabla 3.3 Distribución del momento estático S
Figura 3.4. Distribución del momento estático S
La ecuación diferencial que gobierna la torsión con alabeo restringido del puente
de sección abierta compuesto por dos vigas y una losa, y sometido a una carga
de torsión sinusoidal igual a 0 sinx
m w bL
tal como se observa en la figura
3.5, es mostrada a continuación:
0 siniv
d
xEI GJ w b
L
(3.1)
Donde: E, G son los módulos de Elasticidad y de Corte respectivamente
Jd es el modulo de rigidez a la torsión según Saint Venant
I es el momento de inercia al alabeo (warping)
es el giro de la sección alrededor del centro de giro o de corte
Figura 3.5 Cargas sinusoidales aplicadas al puente de dos vigas y una losa.
Las condiciones de borde para la viga simplemente apoyada de acuerdo a la
tabla 1.1 son:
0 0 30 0
0 0 30 0
z z
z z
(3.2)
El ángulo tendrá la siguiente variación:
0 sinx
L
(3.3)
Reescribiendo la ecuación (3.1) de la siguiente manera:
0" siniv w b x
kEI L
(3.4)
Donde:
dGJ
kEI
(3.5)
Introduciendo la derivada segunda y cuarta de (3.3) en (3.4), se determina el
valor de 0 . Entonces la solución de la ecuación diferencial (3.1) es:
2
0
2 2
1sin
1d
w b L x
GJ L
kL
(3.6)
De acuerdo a las ecuaciones (1.47) y (1.51), los momentos de torsión Primario
(Saint Venant) y Secundario (debido a la restricción del alabeo que origina flujos
de corte verticales en las vigas), son:
0 2
1cos
1
K D
L xH GJ w b
L
kL
(3.7)
0
2 2
1cos
1
w b xH EI
L Lk
kL
(3.8)
Utilizando los siguientes datos:
Longitud del puente L = 30 m
Ancho entre vigas b = 5.5 m
Amplitud de la carga w0 = 10 ton
Sección de Análisis x = 0 (Momentos Torsores Máximos)
Y reemplazando en las ecuaciones (3.5), (3.7) y (3.8), se obtiene:
0.114
285.032 .
240.179 .
K
k
H Tn m
H Tn m
(3.9)
De acuerdo a (1.53) la suma de KH H debe ser igual al momento torsor MT.
525.211 .KH H Tn m (3.10)
Para x = 0, este momento torsor es el resultado de multiplicar las reacciones en
los apoyos debido a las cargas sinusoidales por la distancia entre ellas, que para
este caso sería la separación entre las vigas longitudinales. Estas reacciones
tienen sentidos opuestos y son iguales a:
95.392ow LR Tn
(3.11)
Y el momento torsor MT es:
0 525.211 .T
w LbM Tn m
(3.12)
El bimomento de alabeo B de acuerdo a la ecuación (1,45) para x = 15, donde
es máximo, es:
0
2 2
12293.540 .
1
w b xB EI seno Tn m
Lk
kL
(3.13)
Y a partir del Bimomento se puede obtener los esfuerzos longitudinales de
flexión en las vigas y la losa como resultado de la restricción al alabeo
longitudinal.
B
I
(3.14)
La distribución de los esfuerzos longitudinales en la sección transversal para x =
15 m se presenta en la tabla 3.4 y en la figura 3.6.
Tabla 3.4. Distribucion de los esfuerzos longitudinales debido a la restricción del
alabeo
Figura 3.6 Distribucion de los esfuerzos longitudinales debido a la restricción del
alabeo
Y la distribución de los esfuerzos cortantes debido a la restricción del alabeo en
la sección transversal para x = 0:
Tabla 3.5. Distribución de los esfuerzos cortantes debido a la restricción del
alabeo para x = 0
Figura 3.7. Distribución de los esfuerzos cortantes debido a la restricción del
alabeo para x = 0
Los principales resultados numéricos que se pueden conocer de acuerdo a esta
teoría son los siguientes:
Giro máximo en el centro de luz = 0.0102 rad
Esfuerzo máximo de corte vertical en las vigas = 56.784 Tn/m2
Esfuerzo máximo de corte de torsión = 581.24 Tn/m2
Esfuerzo longitudinal máximo en el centro de luz= 852.121 Tn/m2
3.3 Análisis de un puente de dos vigas y una losa usando el método de las
placas plegadas.
En esta sección utilizaremos el método de las placas plegadas para realizar el
análisis de un puente cargado con cargas sinusoidales asimétricas tal como se
aprecia en la figura 3.5. Para ello se comenzará dividiendo la sección transversal
en dos partes iguales mediante un corte longitudinal en su eje. Ver figura 3.6
Figura 3.6. Sección Transversal seccionada por un corte longitudinal en el eje del
puente
El centroide de la mitad de la sección transversal se encuentra a una distancia uh
de la línea media de la pared vertical, y a uz de la línea media de la losa.
La carga w y las fuerzas cortantes vertical V y horizontal q tienen la siguiente
forma:
0
0
0
sin
sin
cos
xw w
L
xV V
L
xq q
L
(3.15)
Las flechas verticales producidas en el punto C debido a:
a. La carga w
4
0
4sin
v
w L xw
EI L
(3.16)
Donde Iv es el momento de inercia de la viga longitudinal respecto al
eje horizontal
b. y el cortante V:
4
0
4sin
v
V L xV
EI L
(3.17)
c. La rotación de la sección:
2
0 sin2d
V bL x
GJ L
(3.18)
d. El cortante V en el volado de losa
3
0 sin24
l
losa
V b x
EI L
(3.19)
e. Al momento flector producido por el cortante q:
3
0
3sinq z
v
qL xu
EI L
(3.20)
Por compatibilidad, el desplazamiento vertical total del punto C debe de ser igual
a cero:
0C (3.21)
Usando las ecuaciones (3.16), (3.17), (3.18), (3.19) y (3.20) en (3.21), se obtiene
34 4 2 4 3
0 0 0 0 0
4 4 2 34 24
z
v v d losa v
P V V a V q uL L L a L
EI EI GJ EI EI =0 (3.22)
Asimismo, en el punto C debe existir la compatibilidad de deformaciones
unitarias en el sentido longitudinal por efecto de las cargas w y las fuerzas
cortantes V y q.
Las deformaciones unitarias en el punto C en el sentido longitudinal debidas a:
a. La carga vertical w
2
02
w w z zw
v v
M u uLw
E EI EI
(3.23)
b. La fuerza cortante V
2
02
V V z zV
v v
M u uLV
E EI EI
(3.24)
c. La fuerza cortante q
0axial axialq
F qL
E AE AE
(3.25)
d. A la flexión vertical producida por q
2
0. .
q qvert z zf vert q
v v
M u q uL
E EI EI
(3.26)
e. A la flexión horizontal producida por q
2
0
2q flexionhorizontal h
h
qL bu
EI
(3.27)
Por compatibilidad de deformaciones:
0C (3.28)
Utilizando las ecuaciones (3.23), (3.24), (3.25), (3.26) y (3.27) en (3.28), se
obtiene:
222 2
0 0 00 02 2
02
zz zh
v v v h
q q u qu uL L L L L bw V u
EI EI AE EI EI
(3.29)
Reformulando las ecuaciones (3.22) y (3.29):
2 2 4 3
0 0 0 0 02 40
4 24
v vz
d losa
EI Ib bw V q u V V
L L GJ L I
(3.30)
2
0 0 0 0 0
20
h
v vz
z losa z
bu
I Iw V q u q q
L L Au L I u
(3.31)
Combinando las ecuaciones anteriores obtenemos la relación entre las fuerzas
cortantes vertical y horizontal.
2 3 3
3
0 02
1
4 24
1 2
d losa
z
z h z
E b b
L GJ L Iq V
b u
Au I u
(3.32)
Reemplazando valores en la ecuación (3.32) se obtiene:
0 01.473q V (3.33)
Insertando (3.32) en la ecuación (3.30) o (3.31), se calcula V0 en función de w0.
0 0
0 0
0.429
0.632
V w
q w
(3.34)
En consecuencia, las funciones V y q para w0 = 10 tn son:
4.3sin
6.3cos
xV
L
xq
L
(3.35)
De acuerdo a la ecuación (3.35), el valor máximo de la cortante q en el punto de
corte C se produciría en los extremos, mientras que el valor máximo para la
fuerza cortante V se produciría en el centro de luz, siendo estos:
max
max
6.3
4.3
q Ton
V Ton
(3.36)
3.3 Análisis de un puente de dos vigas y una losa usando el método de los
elementos finitos
Finalmente se tiene los métodos computacionales de software comerciales
como el SAP2000, tales como el método de los emparrillados planos de vigas y
el método de los Elementos Finitos que, mediante el uso de elementos tipo
“shell”, permitiría modelar y analizar los diferentes sistemas estructurales
correspondientes a los puentes de vigas y losas para cualquier tipo de
solicitación. El método del emparrillado tendría sus limitaciones para modelar y
analizar los problemas anteriormente mencionados, mientras que en el método
de los Elementos Finitos, que si permite modelarlos y analizarlos, se podría tener
ciertas dificultades en el análisis de los resultados a fin de poder separar e
interpretarlos con fines de diseño.
Para el análisis del puente de dos vigas longitudinales y losa, se utiliza el
software SAP2000 en su versión 12. Con las dimensiones mostradas en la figura
3.1 y utilizando los elementos bidimensionales tipo “Shell”, se modela el puente.
A continuación se presenta en “extrude” la vista del puente modelado.
Figura 3.7. Vista en 3d del modelo del puente de dos vigas longitudinales y losa
Los apoyos están restringidos de tal manera que la condición de simplemente
apoyado se cumpla, es decir los momentos flectores producidos en los extremos
son nulos. En las secciones x = 0 y x = 30 se han utilizado constraints tipo
Diaphragm con la finalidad que la sección no rote.
Para poder cargar al puente con dos cargas asimétricas sinusoidales, se utilizó
primero el comando joint patterns para asignar a cada nodo de la parte superior
de la viga, el valor de carga correspondiente y luego el comando Surface
Pressure, introduciendo la carga distribuida por joint patterns. Se muestra a
continuación la distribución de la carga sinusoidal en la viga derecha.
Entonces la viga de la derecha es cargada con una carga sinusoidal hacia abajo
y la de la izquierda con una carga sinusoidal hacia arriba. La combinación de
ambas cargas dará como resultado el estado de cargas torsionales.
Figura 3.8. Distribución de la carga sinusoidal en la viga derecha
Los esfuerzos longitudinales S11 resultantes se muestran a continuación:
(a)
(b)
Figura 3.9. Distribución de esfuerzos longitudinales (a) en la losa (b) en las vigas
Como se aprecia en la figura 3.9, los esfuerzos longitudinales S11 son mínimos
en los extremos y máximos en el centro de luz de puente, en la parte inferior de
la viga, siendo su valor de 848 Tn/m2.
Los esfuerzos cortantes S12 resultantes se muestran a continuación.
(a)
(b)
Figura 3.10. Distribucion de los esfuerzos cortantes S12 en (a) la losa superior
(b) en la viga.
Como se aprecia en la figura 3.10, los esfuerzos cortantes S12 son mínimos en
el centro de luz y máximos en los extremos del puente, en la zona intermedia de
la viga, siendo su valor de 548.85 Tn/m2.
Ha de mencionarse que los valores medidos en los elementos Shell
corresponden a las caras de estos elementos y no a la línea media de la pared.
Es por esto que el valor del esfuerzo cortante medido en el Shell corresponde a
la combinación de los cortantes por torsión de Saint Venant y los cortantes
producidos como resultado de la restricción al alabeo.
CAPITULO IV
TORSIÓN DE VIGAS CAJÓN RECTAS CON SECCIÓN TRANSVERSAL
DISTORSIONABLE.
En este capítulo se hará una breve descripción de la teoría desarrollada en
Alemania por Dabrowski (1966) para vigas rectas considerando que la sección
transversal es deformable, siendo la distorsión resistida por la acción del marco
de las paredes de la sección.
Cuando una viga cajón es sometida a una carga distribuida, “q”, con una
excentricidad “e” del eje vertical de la sección, la fuerza aplicada puede ser
descompuesta en dos combinaciones de cargas: una simétrica y la otra anti
simétrica, tal como se aprecia en la Figura 4.1 (a):
Figura 4.1. (a) Viga Cajón sujeta a una carga vertical “q” con una excentricidad
“e” y su descomposición en cargas simétricas y anti simétricas; (b)
Descomposición de las cargas anti simétricas en fuerzas
torsionantes y distorsionantes.
Esto quiere decir que la viga sujeta a una carga excéntrica puede ser analizada
por flexión (cargas simétricas) y por torsión (cargas anti simétricas). Para el caso
de la torsión, estas fuerzas torsionales producen en la viga cajón un flujo de
corte constante “q” equivalente a:
2
Tq
A (4.1)
Donde: T es el momento torsor aplicado; A, es el área encerrada por la línea
media de la sección cajón.
Este flujo de corte produce un sistema de cargas torsionantes tal como se
aprecia en la Figura 4.1 (b). Sin embargo, este sistema de cargas no es
equivalente al sistema aplicado (cargas anti simétricas). Para lograr el equilibrio,
un sistema de cargas debe de ser introducido, siendo ésta un sistema de cargas
distorsionales.
El método de Dabrowski (1966) divide el análisis en dos estados. En el primer
estado, la sección transversal se asume indeformable y el análisis se puede
realizar de acuerdo ha como se ha explicado en el Capítulo II del presente
trabajo, es decir, por flexión y por torsión pura, con una buena aproximación. En
el segundo estado la sección transversal es considerada deformable bajo un
sistema de cargas externas distorsionales estáticamente equivalentes a cero que
dará lugar a desplazamientos y esfuerzos longitudinales. Los resultados finales
de los desplazamientos y esfuerzos serán obtenidos por superposición de estos
dos estados.
Las limitaciones y suposiciones para el segundo estado son las siguientes:
a) La viga, es una viga cajón de una celda, de sección transversal
rectangular constante en toda la longitud de la viga.
b) El efecto de las fuerzas de corte distorsionales del primer estado son
considerados despreciables, por tanto sólo se considera las fuerzas
externas distorsionales.
c) Las deformaciones cortantes de membrana se consideran despreciables
d) Las paredes de la sección transversal están rígidamente conectadas en
las esquinas.
e) Los esfuerzos de flexión y deflexiones de cada pared individual puede ser
determinada según la teoría clásica de vigas (variación lineal de los
desplazamientos) y los efectos de las deformaciones de corte en las
deflexiones puede ser consideradas despreciables.
4.1 Desplazamientos
El desplazamiento longitudinal distorsional puede ser expresado como sigue:
d
udz
(4.2)
Donde: es definido como la función de alabeo debido a la distorsión. Para el
caso donde el desplazamiento es restringido, esfuerzos normales y cortantes
ocurrirán en la sección cajón.
Escribiendo las ecuaciones de compatibilidad:
u
z
u v
s z
(4.3)
Por otra parte, usando la suposición c), es decir, la deformación por corte , se
considera despreciable para el caso de distorsión.
0 (4.4)
El desplazamiento en el sentido del perfil de la sección v puede ser expresado
como el producto de dos funciones las cuales son: el ángulo distorsional z y
la distancia perpendicular r(s) del centro de distorsión al perfil de la sección
transversal.
( , ) .v z s z r s (4.5)
Combinando las ecuaciones (4.3), (4.4) y (4.5) podemos llegar a la siguiente
relación:
0
,s
u z s r s ds Cz
(4.6)
Donde C es una constante de integración
Observando la ecuación (4.2) podemos concluir que:
0
s
s r s ds C (4.7)
4.2 Esfuerzo Normal
El esfuerzo distorsional de alabeo y el flujo de corte puede ser obtenido
2
ˆ 2E
z
(4.8)
Dado que la distorsión no produce una fuerza axial adicional, ni momentos
flectores respecto a los ejes x, y, se debe cumplir que:
. 0
. 0
. 0
x
A
y
A
x
A
N dA
M xdA
M ydA
(4.9)
De donde se llega a las siguientes relaciones:
2 1
3
3
b v
u v
A Ay
A A
(4.10)
Donde:
. . .u u b b v v
A bt A bt A ht
La energía de deformación U
debido a los esfuerzos de alabeo distorsional
puede ser calculado como:
2
0
1
2
l
A
U dAdzE
(4.11)
Usando la ecuación (4.8) se tiene:
22
2
02
lEIU dz
z
(4.12)
Donde:
2 2
22 1
48 1 b v
A
b hI dA A A
(4.13)
El Bimomento ligado a esta energía de deformación es:
2
2M EI
z
(4.14)
Por lo que el esfuerzo normal debido a la distorsión es:
M
I
(4.15)
4.3 Esfuerzos Cortantes:
De la condición de equilibrio en el sentido longitudinal para un elemento
infinitesimal, de acuerdo a la figura 4.2, puede ser expresado por:
Figura 4.2 Equilibrio de fuerzas internas en un elemento infinitesimal
0t t
z s
(4.16)
Con la ayuda de la ecuación (4.14), se define el flujo de corte q
debido a la
distorsión como:
.S
q t TI
(4.17)
Donde el momento torsional debido a la distorsión T
está definido por:
3
3
MT EI
z z
(4.18)
Y el momento estático ˆ
S
de la función del alabeo distorsional ̂ está dado por:
0
s
S dA C
(4.19)
Para una sección cajón, el valor de la constante de integración C
tiene como
valor:
15 4 1
4 3 3t v bC A A A
(4.20)
Debido al flujo de corte ˆ
q
, las paredes de la viga cajón experimentarán fuerzas
cortantes verticales, V y horizontales H, cuyos valores son expresados como:
0
0
h
b
TV q ds
b
TH q ds
h
(4.21)
Estas fuerzas V y H originarán que la sección transversal de la viga cajón se
distorsione tal como se muestra en la figura 4.2. Así, una distorsión angular
ocurriría en cada esquina de la sección. Para determinar esta distorsión angular,
rótulas son insertadas en cada esquina de la sección y cajón y momentos
unitarios, 1M , son aplicados en éstos puntos. Luego podemos escribir la
siguiente relación:
.T K (4.22)
Donde: K
, es la rigidez a la distorsión de la sección cajón cuyo valor es el
siguiente:
2
24
2 31
6
t b v
t b v t b v
EIK
h
b h I I I
I I I h b I I I
(4.23)
Siendo:
3 3 3
2 2 212 1 12 1 12 1
t v b
t v b
t t tI I I
Donde: es el cociente de Poisson.
Entonces la energía de deformación debido al esfuerzo cortante ̂ , es:
2
0 0
1
2 2
l lKU T dz dz
(4.24)
4.4 Trabajo debido a una fuerza externa:
Las fuerzas distorsionales qv y qh por unidad de longitud se muestra en la Figura
4.2
2
2
T
v
T
h
mq
b
mq
h
(4.25)
De la figura 4.3, el ángulo que define la distorsión de la sección transversal
está definido como:
0b t iv v w w
h b
(4.26)
Figura 4.3. Desplazamiento y distorsión de la sección transversal
El trabajo realizado por estas fuerzas esta dado por la siguiente relación:
0
02
l
E v b u h b t
l
b u b tT
U q w w q v v dz
w w v vm
b h
0
2
l
T
E
mU dz (4.27)
4.5 La Ecuación Diferencial para el Alabeo Distorsional
La energía potencial total de deformación es igual a:
E
U U U
(4.28)
Reemplazando las ecuaciones (4.12), (4.24), (4.27) en la ecuación (4.28)
22
2
2
0 0 02 2 2
l l l
TEI K md
dz dz dzdz
(4.29)
Minimizando la energía total, es decir, haciendo:
0 (4.30)
Obtenemos la ecuación diferencial que rige la distorsión de una viga cajón.
4
42
Tmd
EI Kdz
(4.31)
Las condiciones de borde que se deben cumplir se muestran en la tabla
siguiente, para los diferentes tipos de apoyo.
Tabla 4.1. Condiciones de Borde
Tipo de Soporte Condición de Borde
Simple 0, 0M
Rígido 0, ' 0
Libre 0, 0M T
Observando la estructura de la ecuación (4.31), se nota que es similar a la
ecuación diferencial que describe el comportamiento de la deflexión de la viga
sobre una fundación elástica, la cual fue estudiada por Hetenyi (1946).
Reformulando la ecuación (4.31), se puede escribir como:
4
4
4
14
2
Tmd
EIdz
(4.32)
Donde: 4
4
K
EI
La solución para este tipo de ecuación diferencial dada por Hetenyi (1946) es:
ˆ
sin sinh sin cosh cos sinh
1cos cosh
2
T
A z z B z z C z z
mD z z
K
(4.33)
A la cual se insertarán las condiciones de borde indicadas en la Tabla 4.1.
Para una viga simplemente apoyada, por ejemplo, se tiene:
Condiciones de Borde:
0
0
0
0
x x l
x x l
(4.34)
Entonces la solución de la ecuación (4.32) bajos estas condiciones de borde
será:
ˆ
cosh cos cosh cos1
2 cos cos
Tm z z z z
K l l
(4.35)
Finalmente, calculado el valor del ángulo distorsionante , los valores de los
momentos flectores transversales mu y mb en las esquinas de la sección cajón
serán:
14
6
14
6
t b
ut b
b t
v
b t
bt b
b t
v
K I Im
I IhI I
b I
K I Im
I IhI I
b I
(4.36)
CAPITULO V
FLEXO-TORSION DE VIGAS CURVAS DE SECCION TRANSVERSAL
RIGIDA. EFECTO DEL ESVIAMIENTO
Me falta la introducción .. la estoy redactando
5.1 Sistema de Ecuaciones Diferenciales
Las ecuaciones diferenciales que gobiernan el comportamiento de una viga
sometida a flexión y a torsión pura son:
0
y
xT
T
x T
y
dQq
ds
MdMm
ds r
dM MQ
ds r
(5.1)
5.2 Ecuaciones Generales para el Momento Flector y Torsor
En la figura 5.1 se muestra una porción de una viga curva de radio r y arco
central . En el extremo izquierdo se muestran las fuerzas internas iniciales, Q0,
MX0 y MT
0. La viga es cargada por una carga vertical repartida q, un momento
torsor distribuido m, una carga puntual P y un momento torsor puntual MT. Las
ecuaciones generales para el momento Flector y Torsor en el punto A de una
viga curva están en función de su radio r y del ángulo , tal como se muestra a
continuación.
Q
m
Figura 5.1 Dirección de las cargas y reacciones en un viga Curva
0 0 0
2
cos sin sin Pr sin sin
1 cos
x x T TM M M Q r M
qr mr
(5.2)
0 0 0
2 0 2
Pr cos Pr cos cos
sin
T T T
x
M Q r Q r M M
qr M qr mr
(5.3)
Las ecuaciones (5.2) y (5.3) son las ecuaciones generales para calcular el
Momento Flector Mx y el Momento Torsor MT en cualquier punto de una viga
curva de radio r; en las mismas las fuerzas y momentos iniciales (0 0 0,
x TQ M y M )
en un extremo de la viga deben de determinarse por las condiciones de borde.
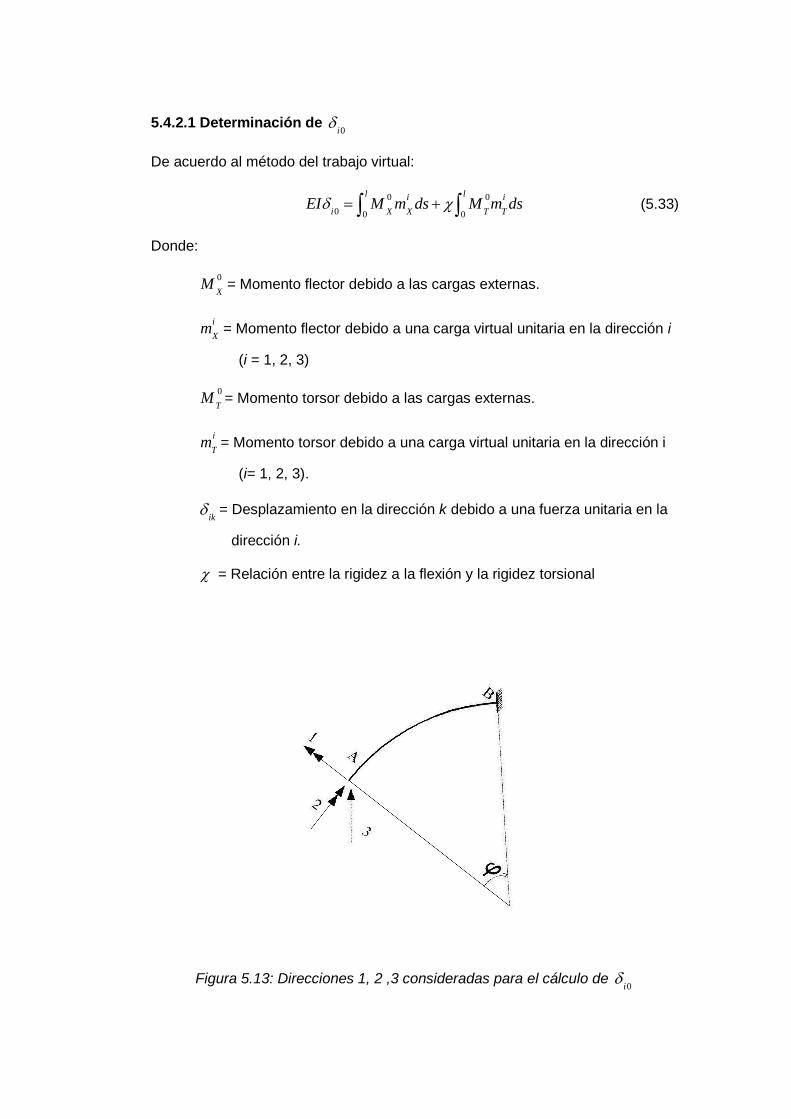
5.3 Calculo de Vigas con apoyos restringidos a la Torsión
En puentes curvos, los estribos poseen una alta rigidez a momentos
torsionantes en su plano, por lo que debemos considerar en el análisis la
restricción de los apoyos a la torsión. Bajo estas condiciones, las vigas son, por
lo general, un sistema estáticamente indeterminado.
Sin embargo, para una carga simétrica, la misma simetría ofrece una ecuación
de equilibrio adicional por lo que el sistema se vuelve determinada. Como se
puede apreciar en la Figura 5.2, una viga curva de radio r sometida una carga
uniformemente distribuida q, los momentos torsores MT en los apoyos se
calculan inmediatamente por la condición de equilibrio que nos ofrece la simetría
de la carga, y son iguales a:
Figura 5.2: Viga Curva con apoyos restringidos a la torsión sometida a una carga
uniformemente distribuida q
0 . . .
2cos2
o
T
q r aM
(5.4)
Donde:
0sin2 cos
2
2
a r
La reacción en los apoyos queda definida por la ecuación que sigue
0
0
1. .
2Q q r (5.5)
Como se observa, para una carga uniformemente distribuida es simple calcular
el momento torsor y en la reacción en los apoyos, e introduciendo estos valores
en las ecuaciones (5.2) y (5.3), se obtiene el momento flector y torsor en
cualquier punto de la viga.
De la misma manera, para una viga curva cargada con un momento torsor
uniformemente distribuido, el momento torsor y la reacción en los apoyos son
iguales a:
Figura 5.3 Viga Curva con apoyos restringidos a la torsión sometida a un
momento uniformemente distribuida m
0
20
0 0
1. cos .
cos2
TM m r d
0 0. . tan
2TM m r
(5.6)
0
0Q (5.7)
La consideración de momentos torsores iguales es de importancia; primero,
debido a que la mayoría de cargas muertas de un puente no se ubican en
posiciones desfavorables en el eje del mismo y; segundo, en puentes curvos el
peso propio produce momentos torsores y reacciones iguales en los apoyos.
Para el caso de cargas asimétricas la viga es, como se mencionó anteriormente,
estáticamente indeterminada. Para la resolución de este problema utilizaremos el
método del trabajo virtual, tomando como redundante al momento torsor del
apoyo derecho. Se debe cumplir entonces la siguiente relación:
0
. 0aa a a
X (5.8)
Donde:
aa : Desplazamiento del apoyo debido a un momento torsor unitario ubicado en
la misma posición y sentido que la redundante.
0a : Desplazamiento del apoyo debido a las cargas externas.
Figura 5.4. Aplicación del trabajo virtual a una viga curva con apoyos restringidos
a la torsión
Derivación de aa
.
De acuerdo a la figura 5.4 se tiene:
0
0
1
1
T aM X
Qr
(5.9)
Reemplazando la ecuación (5.9) en las ecuaciones (5.2) y (5.3), se deriva la
expresiones para el momento flector y torsor que se cumple a lo largo de toda la
viga en función de .
0 0
0 0 0
sin . .sin 0
. cos . 1
X T
T T
M M Q r
M Q r Q r M
(5.10)
Entonces:
0
2 2
0 0
. .l
aa T TEI M ds M rd
0aa
EI r (5.11)
Derivación de 0a
.
(a) (b)
Figura 5.5. Derivación del desplazamiento 0a
(a) Fuerzas Externas (b)
Momento Torsor unitario
Para: 0
0
0 2. 1 cos sin sin
TM Q r qr mr (5.12)
Para:0 0
0 2
0 0
. 1 cos sin sin
.cos Pr 1 cos
TM Q r qr mr
M
(5.13)
Luego, utilizando las ecuaciones anteriores, el valor de 0a
será:
0 0
0
0
1.
a X x
EIM m
0 0 0
0
1
0 0
. .T T T T
rd M m rd M d M d
2
0 2 2 20 0 0
0 0 0
0 0 0
. sin 2sin .2sin2 2 2
sin Pr sin
a
EIQ r qr mr
M
(5.14)
La expresión general de la fuerza cortante 0
Q es:
0 0 0 0 0
0 0
sin sin. tan . tan .
2 sin 2 sin
MQ qr P m
r
(5.15)
Por lo que el valor de 0a
termina siendo:
2 0 0 0 0
0 0 0 0
0
0
0
0
sintan Pr tan
2 2 sin 2
sin
sin
a
EIqr mr
M
(5.16)
Finalmente, utilizando las ecuaciones (5.11) y (5.16) en la ecuación (5.8),
tenemos la expresión general para el momento torsor en el apoyo derecho.
2 0 0 0 0 0 0
0 0 0
sin sintan Pr tan
2 2 sin 2 sinaX qr mr M
(5.17)
5.4 Viga curva con apoyos Esviados
En este caso en particular, los apoyos ya no son radiales, es decir presentan una
inclinación respecto a las líneas radiales que pasan por los apoyos, tal como se
puede observar en la Figura 5.6. Este sistema es hiperestático con un grado de
indeterminación igual a 1.
Para conseguir el sistema primario estáticamente determinado, se debe
establecer primero la redundante la cual será extraída del sistema
indeterminado; para nuestro caso particular, se selecciona el momento torsor
ortogonal al apoyo izquierdo como redundante del sistema; consecuentemente la
ecuación de compatibilidad que debe cumplirse en el apoyo izquierdo se escribe
como sigue:
Figura 5.6. Viga curva con apoyos esviados.
0
. 0aa a a
X (5.18)
Donde:
aa : Desplazamiento del apoyo debido a un momento torsor unitario Xa = 1,
ubicado en la misma posición y sentido que la redundante.
0a : Desplazamiento del apoyo debido a las cargas externas.
5.4.1 Derivación de aa
Considerando el sistema primario cargada por un momento torsor perpendicular
al apoyo izquierdo. Retirando el apoyo y colocando la fuerza equivalente que
resta, es decir la reacción vertical, la viga curva quedaría como se aprecia en la
figura 5.7.
Figura 5.7. Derivación del desplazamiento del apoyo aa
debido a un momento
torsor Xa = 1
El momento Torsor Xa genera en el apoyo derecho un momento torsor y un
momento flector. Podemos entonces considerar que se trata de una viga curva
en volado sometida a un momento flector, un momento torsor y una carga
vertical; la expresión para aa
se escribe como sigue:
22
2 22 2 2
aaEI r M d r I II III d
r I II III I II I III II III d
(5.19)
Desarrollando la ecuación (5.19), se obtiene
2 2 2
11 22 33 12
13 23
sin cos . ' 2cos .sin .
2sin . ' 2cos '
aaEI Q
Q Q
(5.20)
Donde: ik
es el valor del desplazamiento del extremo izquierdo en la dirección i
cuando se le aplica una carga en la dirección k.
5.4.1.1 Cálculo de los valores ik
:
Con la ayuda de las ecuaciones (5.2) y (5.3), se calculan las expresiones
ikEI para una viga curva. Para ello, se considera a la viga curva como un
volado.
Según el método del trabajo virtual, el desplazamiento en un punto i debido a
cargas externas es igual a:
0 0
l lx x T T
i
M m ds M m ds
EI EJ (5.21)
Donde:
Mx = Momento flector debido a las cargas externas
mx = Momento flector debido a un carga unitaria virtual ubicada en el
punto i
MT = Momento Torsor debido a las cargas externas
mT = Momento Torsor debido a un carga unitaria ubicada en el punto i
Por conveniencia para nuestro caso, la expresión (5.21) será modificada
ligeramente para ser presentada como:
0 0
l lk i k i
ik X X T TEI M m ds M m ds (5.22)
Donde:
k
XM = Momento flector debido a una carga en la dirección k (k = 1, 2, 3)
(Ver figura 5.8), ubicada en el punto A
i
Xm = Momento flector debido a una carga virtual unitaria ubicada en el
punto A en la dirección i (i = 1, 2, 3)
k
TM = Momento torsor debido a una carga en la dirección k (i = 1, 2, 3),
ubicada en el punto A
i
Tm = Momento torsor debido a una carga virtual unitaria ubicada en el
punto A en la dirección k (i = 1, 2, 3)
ik = Desplazamiento en la dirección k debido a una fuerza unitaria en la
dirección i
= Relación entre la rigidez a la flexión y la rigidez torsional
Figura 5.8. Dirección de las fuerzas y momentos en el extremo de una viga curva
Calculando las expresiones EIik
, se tiene:
11
1 11 sin 2 1
4 2EI r
(5.23)
22
1 11 sin 2 1
4 2EI r
(5.24)
3
33
1 11 sin 2 1 2sin
4 2EI r
(5.25)
2
12
11 sin
2EI r (5.26)
2
12
11 sin
2EI r (5.27)
2
23
1 11 sin 2 1 sin
4 2EI r
(5.28)
Reemplazando las ecuaciones (5.23), (5.24), (5.25), (5.26), (5.27), (5.28) en
(5.20) se tiene finalmente la expresión para aa
, así:
22
0
22 2 2
0
0 0
1 1sin cos 1 sin
4
1sin cos 1
2
cos sin 1 sin 2 sin 2 sin 1 cos
aaEI rQ
r
rQ r Q
rQ rQ rQ
(5.29)
Donde la Fuerza transversal Q’ se obtiene de la Figura 5.9:
Figura 5.9. Calculo de Q’
0
0 0
sin
2 sin cos2 2
Q
r
(5.30)
5.4.2 Derivación de 0a
Figura 5.12 Derivación del desplazamiento del apoyo aa
debido a un momento
a las cargas externas
De igual manera que el caso anterior, la expresión para aa
es:
0 0aEI M M rd I II III a b rd
I a I b II a II b III a III b rd
0
0 10 20 30sin cos ' .
aEI Q AQ (5.31)
Donde:
13 23 33
sin cos 'A Q (5.32)
Y 0i
representa al desplazamiento en la dirección i del extremo izquierdo de la
viga bajo la acción de las cargas externas. La expresión A es independiente del
tipo de carga.
5.4.2.1 Determinación de 0i
De acuerdo al método del trabajo virtual:
0 0
0 0 0
l li i
i X X T TEI M m ds M m ds (5.33)
Donde:
0
XM = Momento flector debido a las cargas externas.
i
Xm = Momento flector debido a una carga virtual unitaria en la dirección i
(i = 1, 2, 3)
0
TM = Momento torsor debido a las cargas externas.
i
Tm = Momento torsor debido a una carga virtual unitaria en la dirección i
(i= 1, 2, 3).
ik = Desplazamiento en la dirección k debido a una fuerza unitaria en la
dirección i.
= Relación entre la rigidez a la flexión y la rigidez torsional
Figura 5.13: Direcciones 1, 2 ,3 consideradas para el cálculo de 0i
Entonces las expresiones 0i
para los diferentes tipos de cargas:
a) Debido a una carga uniformemente repartida q
3
10
1 11 sin 1 sin 2 cos
2 4EI qr
(5.34)
3 2
20
11 sin 1 cos 1 sin
2EI qr
(5.35)
4 2 2
30
1 11 sin cos cos 1
2 2EI qr
(5.36)
b) Debido a una carga puntual P
Figura 5.14 Calculo del desplazamiento 0i
debido a una carga puntual
2
10
1 11 sin sin cos cos 1 sin
2 2EI Pr
(5.37)
2
20
1 11 sin cos sin sin 1 cos
2 2EI Pr
(5.38)
3
30
1 11 sin cos sin sin sin 1 cos
2 2EI Pr
(5.39)
C) Debido a un momento torsor distribuido m
2
10
1 11 sin 2 1 sin
4 2EI mr
(5.40)
2 2
20
11 sin cos 1
2EI mr
(5.41)
3 2
30
11 sin cos 1
2EI mr
(5.42)
d) Debido a un momento torsor puntual MT
Figura 5.15. Calculo del desplazamiento 0i
debido a un momento torsor
puntual
10
1 11 sin sin 1 sin
2 2TEI M r
(5.43)
20
1 11 sin cos 1 cos
2 2EI Mr
(5.44)
2
30
1 11 sin cos 1 cos sin
2 2TEI M r
(5.45)
Con la ayuda de las expresiones para ik
y 0i
, podemos escribir A y 0a
para
cada tipo de carga.
2
0 0 0
2
0 0 0 0
1 1cos 1 sin 2 1 sin
4 2
1. sin sin 1 sin 1 cos
2
A r Q r
Q r
(5.46)
5.4.2.2 Carga Uniformemente Distribuida
2 2
0 0 0 0 0
2
0 0 0
0
0 0 0 0
1cos 1 sin cos 1 sin
2
1 1cos cos 1 sin 1 sin
2 4
11 sin cos
2
aEI qr Q r
Q r
AQ
(5.47)
5.4.2.3 Momento Torsor Uniformemente Distribuido
2 2
0 0 0
0 0
0
0 0
1cos 1 sin cos 1
2
1cos 1 sin 1 sin 2
4
11 sin
2
aEI mr Q r
Q r
AQ
(5.48)
5.4.2.4 Carga Concentrada
2
0 0 0 0 0
0 0 0 0
0 0 0 0 0 0
0
1 1Pr cos 1 sin cos 1 cos
2 2
1sin sin sin 1 sin sin
2
1cos cos 1 sin sin
2
aEI Q r
Q r
AQ
(5.49)
5.4.2.5 Momento Concentrado
0 0 0 0 0
0 0 0 0 0
0
1 1cos 1 sin cos 1 cos
2 2
1 1sin sin 1 sin sin 1 sin
2 2
aEI Mr Q r x
Q r
AQ
(5.50)
5.4.2.6 Cálculo de Q0
En las ecuaciones anteriores, Q0 depende únicamente del tipo de carga que está
siendo aplicada a la viga. Entonces calculando el valor de Q’ para cada caso de
carga se tiene:
a. Carga Distribuida
Figura 5.16 Cálculo de Q0 para una carga uniformemente distribuida q.
00 0
0 0
sintan
22sin cos
2 2
Q qr
(5.51)
b. Momento torsor uniformemente distribuido
Figura 5.17. Cálculo de Q0 para un momento torsor uniformemente distribuido
0 0tan
2Q m
(5.52)
c. Carga Concentrada
Figura 5.18. Cálculo de Q0 para una carga puntual P.
0 0
0 0
sin sin
2sin cos2 2
Q P
(5.53)
d. Momento Concentrado
Figura 5.19. Cálculo de Q0 para un momento torsor concentrado M.
0 0
0 0
sin
2 sin cos2 2
MQ
r
(5.54)
CAPITULO VI
TORSIÓN DE VIGAS CURVAS EN EL PLANO CON SECCIÓN
TRANSVERSAL DISTORSIONABLE.
Dabrowski (1976) extendió su trabajo descrito en el Capítulo IV para el análisis
de vigas cajón curvas en el plano con sección transversal distorsionable
(Diafragma Continuo) sugiriendo un método para su análisis.
El análisis será realizada en dos etapas de la misma manera como fue descrita
para vigas cajón rectas. En la primera etapa, la sección transversal de la viga se
considera rígida y la estructura es analizada como se detalló en el capítulo
anterior. En la segunda etapa, la sección transversal es considerada deformable
bajo el sistema de cargas distorsionales. La solución final es obtenida de la
superposición de ambos etapas.
6.1 Hipótesis y suposiciones
Considerando una viga cajón curva en el plano, tal como se muestra en la figura
6.1
Figura 6.1. Viga cajón curva en el plano.
Las suposiciones básicas utilizadas en el análisis de vigas cajón rectas como
medio diafragma continuo, con la excepción de considerar fuerzas distorsionales
adicionales debido a la curvatura en las esfuerzos de flexión, son consideradas
como válidas para el caso de vigas cajón curvas en el plano. Entonces, de la
misma manera que para la distorsión de vigas cajón rectas, el desplazamiento
longitudinal se define como:
,d
u z s sdz
(6.1)
Y su distribución en la sección transversal de la viga cajón curva se aprecia en la
figura 6.2.
Figura 6.2. Distribución de la función de desplazamiento en la viga cajón curva
6.2 Derivación de la Ecuación Diferencial
La ecuación diferencial que gobierna la distorsión puede ser derivada de la
misma manera como se realizó para el caso de vigas cajón rectas de sección
transversal distorsionable (ver Capítulo IV). En este caso, la energía potencial
( ) acumulada en la viga cajón curva es estimada por la siguiente ecuación:
E M
U U U V
(6.2)
En la ecuación (6.2), la energía de deformación debido a los esfuerzos normales
U
, la debida a los esfuerzos t
U y la debida a fuerzas externa E
U pueden ser
aproximadas con las ecuaciones (4.22), (4.24), (4.27) derivadas para vigas
rectas, omitiendo la influencia de la curvatura de la viga. El termino VM es
causado por las fuerzas distorsionales Mx/R producto de la influencia de la
, '( )u z s z s
curvatura en los esfuerzos de flexión. El trabajo realizado por estas fuerzas
distorsionales puede ser escrita de la siguiente manera:
0
1
2
L
M
MV ds
r (6.3)
Donde es un parámetro adimensional el cual modifica el sistema de fuerzas
distorsionales de manera que se tome en cuenta la flexión de las paredes
verticales, y esta dado por:
2
1
0
(6.4)
En el cual:
0 2
2
1
2 2
2 31
6
7 3 1
10 2
3 2 3 3 2 3
15 6
u b w
u b w u b w
u b u u
w
xx xx
u b b u b u u bw
xx u b w u b w
b h I I I
I I I h b I I I
h h A h hh t
I I
h h b hI I h h b h I Iht
I I I I h b I I I
(6.5)
El valor de los momentos de inercia de las paredes superior, inferior y vertical se
definen como:
3 3 3
2 2 212 1 12 1 12 1
u v b
u v b
t t tI I I
(6.6)
Reemplazando las ecuaciones (4.22), (4.24), (4.27) y (6.3) en (6.2) la expresión
para la energía potencial resulta:
2
2
2
0 0 02 2 2 2
L L L
xTEI K Mmd
ds ds dsrds
(6.7)
Minimizando la función de la energía potencial (6.7) resulta la ecuación
diferencial que gobierna el comportamiento distorsional de la viga.
4
42
xTMmd
EI Krds
(6.8)
Donde: I
es la constante de alabeo distorsional y está definido por:
2 2
22 1
48 1 b w
A
b hI dA A A
(6.9)
En el cual equivale a:
3
3b
u w
w
A A
A A
(6.10)
Y:
0
24EIK
h
(6.11)
Las condiciones de borde para la solución de la ecuación (6.8) están dadas en la
siguiente tabla:
Tabla 6.1. Condiciones de borde
Tipo de Soporte Condición de Borde
Simple ˆ0, 0M
Rígido 0, ' 0
Libre ˆ ˆ0, 0M T
Para una viga con apoyos simples, cargada con: una carga uniformemente
distribuida q, una fuerza vertical (P), un momento torsor uniformemente
distribuido m y un momento torsor M. La solución de la ecuación diferencial (6.8)
puede obtenerse mediante el uso de series de Fourier.
Expresando las cargas externas en términos de series de Fourier, se tiene:
1
1
sin
sin
n nn
n nn
q z q z
m z m z
(6.12)
Donde:
n
n
l
(6.13)
Para cargas P y M, ubicadas a una distancia z = zp, (6.12) es igual a:
2sin
2 sin
n n c
n n c
Pq z
l
Mm z
l
(6.14)
Para las cargas uniformemente distribuidas q, m:
4
4
n
n
qq
n
mm
n
(6.15)
El momento flector Mx también puede ser expresado en términos de series
Fourier:
2
1
sinn n
x n nn
n
mM p z
r
(6.16)
Reemplazando las ecuaciones (6.12) y (6.16) en (6.8) y usando las condiciones
de borde para una viga curva simplemente apoyada, se obtiene:
0 0 0 0
0 0
z M z
z l M z l
(6.17)
la solución también es expresada como series de Fourier:
1
sinn n
n
z
(6.18)
Donde:
24
4
1
2 1
n n
n n n
nn
mm p
r rK b
(6.19)
Los valores de los momentos transversales en las esquinas de la sección cajón
está dada por:
14
6
14
6
u b
uu b
b u
v
b u
bu b
b u
v
K I Im
I IhI I
b I
K I Im
I IhI I
b I
(6.20)
La función de alabeo se muestra en la figura 6.3 y tiene la misma distribución
que en el caso de vigas cajón rectas.
Figura 6.3. Distribución de la Función de alabeo
Y sus valores son:
1
2 1
1
4 1
4 1
bh
bh h
(6.21)
6.3 Esfuerzos Normales y Cortantes
El valor de los esfuerzos normales distorsionales
y del esfuerzo cortante
es igual a:
M
I
q ST
t I
(6.22)
Donde:
0
s
S ds
(6.23)
El valor del Bimomento distorsional M
y del momento torsor distorsional T
:
2
2
3
3
dM EI
ds
dM dT EI
ds ds
(6.24)
CAPITULO VII
INTRODUCCIÓN A LA TEORÍA GENERALIZADA DE VIGAS.
La Teoría Generalizada de Vigas, tiene como objetivo unificar y extender las
diferentes teorías convencionales para el análisis de vigas de sección prismática.
La misma fue derivada por Schardt (1989) como una extensión del trabajo de
Vlasov, considera que la sección transversal de la viga es deformable aunque
sólo para secciones abiertas sin ramificaciones y secciones cajón unicelular.
Camotim et al (2008) extendieron el trabajo de Schardt para el análisis de vigas
de sección arbitraria.
En este capítulo se realizará una descripción de las etapas involucradas para el
análisis de una viga de paredes delgadas. En la primera parte se describirá con
detalle, la derivación del sistema de ecuaciones diferenciales que gobierna el
estado de deformación de la viga. Luego se describirá el análisis de la sección
transversal con la finalidad de obtener las propiedades características y los
métodos de solución de la ecuación diferencial. Finalmente se utilizará un
ejemplo para comparar los resultados obtenidos por este método con un modelo
realizado en el programa basado en elementos finitos SAP2000.
7.1 Derivación de la Ecuación Diferencial
7.1.1 Sistema de Coordenadas
El sistema de coordenadas a utilizar esta representado en la figura 7.1, donde el
eje X está ubicado a lo largo del eje de la viga y el eje s, a lo largo de la línea
media de la sección transversal.
La viga está compuesto de una serie de paredes delgadas rectangulares
(numero de paredes = q), de espesor constante (t).
Se denominará nodos de la sección transversal a los puntos de su línea media,
localizadas en el borde longitudinal de una pared o en una línea de pliegue. Una
sección abierta que posee q paredes entonces tendrá q + 1 nodos.
(a) (b)
Figura 7.1. Sistema de coordenadas asumidas para (a) una viga de sección
abierta (b) un elemento infinitesimal de la sección
7.1.2 Hipótesis Asumidas:
La formulación de la Teoría Generalizada de Vigas (GBT por sus siglas en
ingles: Generalised Beam Theory) está basado en las siguientes suposiciones:
a) Las hipótesis de Kirchhoff son validas para cada placa quienes forman la
viga, lo que significa adoptar la teoría de placas delgadas. Por lo tanto,
las fibras normales a las línea media se mantienen normales, rectas e
inextensibles a la línea media (deformada) durante el proceso de
deformación. ( 0xz sz y 0zz ).
b) Las componentes de deformación de membrana que se mantienen son
las extensiones longitudinales (M
xx ). Las deformaciones por corte y las
extensiones transversales de membrana son despreciables.
( 0M M
ss ss )
De acuerdo a estas suposiciones, las expresiones que relacionan las
deformaciones cinemáticas con los desplazamientos de la línea media son:
,
,
,
,
.
2 .
M
xx x
F
xx xx
F
ss ss
F
xs s
u
zw
z w
z w
(7.1)
Uno de los métodos usados en el análisis de placas, es la de expresar los
componentes del desplazamiento como el producto de dos funciones: una
función que dependa de x (coordenada del eje de la viga) y la otra, de s
(coordenada de la línea media de la sección transversal). Esto con el fin de
obtener una representación de los desplazamientos que sea compatible con las
Teorías Clásicas de Vigas.
,,
,
,
xu x s u s x
v x s v s x
w x s w s x
(7.2)
La clave en la formulación de la Teoría Generalizada de Vigas está relacionada
con la alternativa y conveniente forma de escribir las ecuaciones (7.2), lo cual
envuelve los siguientes aspectos:
a) Expresar los desplazamientos de la línea media, v(s) y w(s) en términos
del desplazamiento longitudinal u(s), un procedimiento el cual es posible
debido a las simplificaciones anteriores (Todas de naturaleza
geométrica).
b) Asumir que u(s) es una función que varía linealmente en cada placa que
conforma la sección transversal. Esta suposición implica que u(s) está
completamente definido por sus valores nodales:
k ku s u s u s (7.3)
Donde uk(s) es una función lineal de s que posee como valor a la unidad
en el nodo k y cero en los demás nodos (Función Elemental de Warping).
u(sk) es el valor del warping en el nodo k y se aplica la convención de
suma para el subíndice k. Al ser funciones lineales, podemos representar
de forma vectorial, siendo los elementos del vector, los valores que toman
estas funciones en los nodos.
1 1, , , ,
0, ,1, ,0
r n
k
u u u
u
u (7.4)
De esta manera, podemos considerar que la función u(s) es una
combinación lineal, siendo uk(s) una base de vectores linealmente
independientes. Este procedimiento conlleva a “discretizar” la
configuración de la deformada de la sección transversal en un número de
modos igual al número de nodos, con el warping nodal como variables
desconocidas o en otras palabras como Grados de Libertad (GDL).
Entonces los componentes de los desplazamientos definidos por las ecuaciones
(7.2) adoptan la siguiente forma:
,,
,
,
k k x
k k
k k
u x s u s x
v x s v s x
w x s w s x
(7.5)
A las ecuaciones anteriores se aplica la convención de suma para el subíndice k
(1 1k q , n es el número de placas que conforman la viga), y
k ku s x .
7.1.3 Relaciones Desplazamiento – Deformación
Combinando las ecuaciones (7.5) y (7.1), se obtiene:
xkskxs
ksskss
xxkkkxx
wz
wz
wzu
,,
,
,
..2
..
..
(7.6)
De acuerdo a la teoría de la elasticidad, las relaciones constitutivas para un
elemento isotrópico se definen como:
2 2
2 2
01 1
01 1
0 0
xx xx
ss ss
xs xs
E E
E E
G
(7.7)
Combinando las ecuaciones (7.6) y (7.7), se obtiene:
, .122 2
, .222 2
, ,
. . .1 1
. . .1 1
2 .
xx k k k xx k ss k
ss k k k xx k ss k
xs k s k x
E Eu z w z Q w
E Eu z w z Q w
Gz w
(7.8)
7.1.4 Principio del Trabajo Virtual
7.1.4.1 Variación en la Energía de Deformación:
La variación de la Energía de Deformación del elemento, es decir el trabajo
virtual de las fuerzas internas ( Uδ ), envuelve los términos relacionados con el
trabajo virtual realizado por:
a) Las esfuerzos normales longitudinales
b) Los esfuerzos normales transversales
c) Esfuerzos normales en el plano “xs”
Entonces, se tiene:
xx xx ss ss xs xs xx ss xs
L b t
U dzdsdx U U U (7.9)
Donde las deformaciones virtuales se definen como:
xisixs
ississ
xxiikxx
wz
wz
wzu
,,
,
,
..2
..
..
(7.10)
Introduciendo las ecuaciones (7.8) y (7.10) en (7.9), se tiene lo siguiente:
a. Trabajo Virtual realizado por los esfuerzos normales longitudinales
1 2 2
, ,0
1 2 2
, ,0
1 2 2
, ,
L
xx xx xx ik ik k xx ik k i x
L b t
L
ik ik k xxx ik k x i
ik ik k xxxx i ik k xx i
L
U dzdsdx E C C G D
E C C G D
E C C G D dx
(7.11)
Donde:
, ,2
1
2 3
2
1 3
, ,
2
,2
1
12 1
1
12 1
1
3
12 1
ik i ss k ss
b
ik i k
b
ik i k
b
ik i s k s
b
ik i k ss
b
B w w ds
C tu u ds
C t w w ds
D t w w ds
ED w w ds
G
(7.12)
Esta última ecuación expresa el trabajo virtual realizado por los esfuerzos
normales longitudinales.
b. Trabajo Virtual realizado por los esfuerzos normales transversales:
2
,ss ss ss ki k xx ik k i
L b t L
U dzdsdx G D EB dx (7.13)
La ecuación (7.13) expresa el trabajo virtual realizado por los esfuerzos
normales transversales.
c. Trabajo Virtual realizado por los esfuerzos cortantes en el plano xs:
1 1
, ,0
L
xs xs xs ik k x i ik k xx i
L b t L
U dzdsdx G D G D dx (7.14)
La ecuación expresa el trabajo virtual realizado por los esfuerzos cortantes en
el plano xs.
Finalmente, reemplazando las ecuaciones (7.11), (7.13) y (7.14) en la ecuación
(7.9), se obtiene la expresión que define la variación de la Energía de
Deformación del elemento ( Uδ ) :
, ,
1 2 2
, , , ,0 0
ik k xxxx ik k xx ik k i
L
LL
ik k xxx ik ik k x i ik k xx ik k i x
U EC GD EB dx
EC G D D EC GD
(7.15)
Donde:
1 2
1 2 2
ik ik ik
ik ik ik ki
C C C
D D D D
(7.16)
7.1.4.2 Trabajo Virtual realizado por las cargas externas:
Consideremos una carga externa general aplicada por unidad de superficie,
q(x,s) = q, tal como se indica en la Figura 7.2.
Figura 7.2 (a) La carga general q, (b) Componentes de la carga q en las
direcciones x, s y z.
El trabajo virtual realizado por las cargas externas aplicadas (δΠ ) se obtiene
sumando trabajos realizados por las componentes de la carga q (qx, qs y qz)
asociado a los desplazamientos virtuales du, dv y dw respectivamente.
x s z
L b
q u q v q w dsdx (7.17)
Introduciendo (7.5) en (7.17)
0
L
i i x i
L
q dx q u (7.18)
Donde:
,i s i z i x x i
L
q q v q w q u (7.19)
7.1.5 Ecuaciones de Equilibrio y Condiciones de Borde
De acuerdo al principio del trabajo virtual, la variación de la energía de
deformación ( Uδ ) debe ser igual al trabajo virtual efectuado por las cargas
externas. Entonces igualando las ecuaciones (7.15) y (7.19), y dado que la
función es arbitraria, se tiene:
U (7.20)
Sistema de Ecuaciones de Equilibrio:
, ,ik k xxxx ik k xx ik k iC D B q (7.21)
Con condiciones de Borde:
1 2
, , 0
2
, , , 0
0
0
u
L
ik k xxx ik ik k x i i
L
ik k xx ik k x i x
EC G D D q u
EC GD
(7.22)
La expresión (7.21) establece el sistema de ecuaciones diferenciales que rigen el
estado de deformación, siendo (7.22) las condiciones de borde que deben de
cumplirse.
7.2 Análisis de la Sección Transversal
Un aspecto único en la Teoría Generalizada de Vigas radica en la forma por la
cual el campo de desplazamientos de la viga es aproximada (discretización de la
sección transversal), es decir, las funciones de forma uk, vk y wk son
seleccionadas. Esta selección involucra los siguientes pasos:
i) Selección sistemática de un juego de “funciones iniciales de forma”.
ii) Determinación de un juego de funciones mecánicamente
significativas conocidas como “funciones finales de forma”.
7.2.1 Funciones Iniciales de forma
Consideraciones para la formulación de las funciones:
a) Se considera un elemento infinitesimal de la viga de longitud dx, limitado
por dos secciones transversales localizadas a x = x0 y x = x0 + dx.
b) La viga cuya sección transversal está formada por n paredes
rectangulares, es discretizada en :
n + 1 nodos naturales
m nodos intermedios, totalizando un total de N = n + m + 1
nodos.
Como se ha enunciado anteriormente, las funciones vk y wk se expresan en
función de uk, mediante relaciones netamente geométricas, por lo que es
necesario únicamente seleccionar un juego de funciones iniciales uk, quedando
las demás automáticamente definidas secuencialmente, es decir, que para
obtener las funciones wk sólo será posible si se definen primero las funciones vk.
7.2.1.1 Evaluación de uk
Las funciones elementales de warping uk, de acuerdo a las hipótesis
consideradas, son funciones lineales. Estas funciones resultan de imponer
secuencialmente desplazamientos axiales unitarios en cada nodo natural,
mientras que en los demás nodos naturales se considera desplazamiento nulo,
es decir:
1
1... 10rk
nodo r ku k n
nodo r k
(7.23)
Ya que la sección transversal está dividida en n + 1 nodos naturales, entonces
tendremos n + 1 funciones iniciales de desplazamiento axial.
Figura 7.3. Funciones elementales de warping uk
Representando a estas funciones en forma matricial, llamamos U a la matriz
que contiene dichas funciones. Para el caso en que la sección transversal
contiene solamente nodos naturales, esta matriz U sería de orden (n+1) x (n+1)
de la siguiente forma.
1 2 3 1 1
1 1
2 1
3 1
1
1
1
1 1
1
1 1
r n n nu u u u u u u
U r
n
n
n
(7.24)
7.2.1.2 Evaluación de vk
En razón a que las deformaciones de membrana por corte se consideran
despreciables (Hipótesis de Vlasov), cada función elemental de warping está
asociada a una función de desplazamiento transversal vk (s). Vlasov (1962)
utilizó ésta hipótesis para expresar el alabeo de la sección transversal en función
de los desplazamientos en el plano de la sección transversal. En nuestro caso,
será al contrario: expresaremos el desplazamiento en el plano en función del
alabeo o warping. Véase la figura 7.4
De acuerdo a Vlasov, para un elemento infinitesimal de longitud dx = 1, se
cumple lo siguiente:
0M s
v u
x s
(7.25)
La derivada del warping en la dirección de “s” se expresa en función de los
valores del alabeo de cada nodo, es decir:
1r r
r
u uu
s b
(7.26)
Figura 7.4. ……………………………………………………………………….
Combinando las ecuaciones (7.25) y (7.26) se obtiene:
1
,
r r
r x
r
u uv uv
x s b
(7.27)
Para cada función de warping ur(s), la correspondiente función de
desplazamiento en el plano vr(s) es una función constante, debido a que 0ss .
Entonces en cada pared i, el valor de vk(s) está dado por:
rkr
r
uv s
b
(7.28)
Donde ib y iu son el ancho y el desplazamiento relativo de warping del nodo
final respecto al inicial de la pared i.
7.2.1.3 Evaluación de la función wr(s)
Las funciones wk(s), originadas por imposición de funciones elementales de
desplazamiento axial o warping, se obtienen luego de asegurar:
La compatibilidad entre los desplazamientos transversales en el
plano vk(s) y wk(s)
Continuidad en la rotaciones por flexión wk,s en todos los nodos de
la sección. Es decir se debe cumplir que las funciones dw ds y
2 2d w ds sean continuas.
En la figura 7.5, se muestra la configuración de la deformada de la sección
transversal en x = x0 + dx en relación a la sección transversal en x0, debido a la
compatibilidad de desplazamientos transversales, para una función ur impuesta.
Figura 7.5. ……………………………………………………………………
En consecuencia, la determinación de cada función wk(s) requiere de la solución
de un problema estáticamente indeterminado de placas plegadas donde los
momentos transversales están en equilibrio independientemente de las fuerzas y
momentos longitudinales. Esto se realiza utilizando el método de los
desplazamientos o de las rigideces donde el giro de los nodos son las
incógnitas. Es decir que el elemento tridimensional de longitud dx es analizado
en esta etapa como un pórtico.
Obtenido los ángulos de giro de los nodos, la función wk para la pared i queda
definido por:
1 2 1 3 4 1 1.
i i iw s N w N w N N
(7.29)
Donde:
2 3
1
2
2
2
3
2
4
1 3 2
21
3 2
x xN
b b
x xN x
b b
x xN
b b
x xN x
b b
(7.30)
7.2.1.4 Nodos Intermedios
Con la finalidad de considerar efectos locales como la flexión de las paredes de
la sección transversal, una forma efectiva es la de añadir nodos intermedios, es
decir nodos que se encuentran entre los nodos naturales. Esto involucra realizar
ciertas modificaciones al análisis de la sección transversal, de tal manera de no
ver afectado su efectividad.
Por cada nodo intermedio se debe de generar funciones elementales de flexión
siendo estas funciones cúbicas. Estas se forman al imponer secuencialmente un
desplazamiento unitario 1r
w en el nodo intermedio y en cada nodo extremo, y
fijando el desplazamiento w en los demás nodos, induciendo a un nuevo estado
de deformación tal como se aprecia en la Figura 7.6.
Utilizando el método de los desplazamientos, se puede calcular el valor de los
ángulos en cada nodo como resultado del estado de deformación, por lo que la
función w(s) queda definida.
Cabe decir que este nuevo juego de funciones elementales de flexión sólo
genera desplazamiento en el plano de la sección transversal, mas no
desplazamiento longitudinal
Figura 7.6. Función elemental de flexión
La matriz U también debe ser modificada cuando existan nodos intermedios
añadidos. En el caso en que la sección transversal posea m nodos intermedios,
la matriz U seria de orden (n+m+1) x (n+1), y los valores de los desplazamientos
axiales um se calcularían mediante interpolación de los desplazamientos axiales
de los nodos naturales:
Relacionando los desplazamientos axiales y la magnitud de la sección en la
figura 7.7, se obtiene:
Figura 7.7. …………………………………………………………………
1 2 ·m i i j
i
b bu u u u
h
(7.31)
Por lo tanto, todas la funciones uk(s), vk(s) y wk(s) pueden ser expresados en
términos de funciones elementales de warping y de flexión conocidas, cuyas
amplitudes son los grados de libertad iniciales de la sección transversal
discretisada.
Una vez que las “funciones iniciales de forma” sean conocidas, las matrices de
acuerdo a la ecuación (7.12), son fácilmente calculadas de manera mecánica,
consumiendo tanto tiempo como esfuerzo computacional necesario. Sin
embargo, todas estas matrices están llenas (es decir todos los elementos que
conforman las matrices no son nulas), lo que implica que la ecuación de
equilibrio (7.21) sea altamente acoplada, por lo que complica la tarea de
encontrar la solución. Adicionalmente, los componentes de varios tensores
carecen de significado físico, incluso en el caso más trivial como es en la flexión.
En tal sentido, con el fin de utilizar todo el potencial del GBT, un sistema alterno
de ecuaciones, lo mas desacoplado posible, debe ser considerado. Esto se logra
mediante:
i. Diagonalización simultanea de las matrices [Cik] y [Bik].
ii. La identificación de un juego de n + 1 funciones de warping
ortogonales uk
iii. Definición del sistema de ecuaciones de equilibrio (7.21) y las
condiciones de borde (7.22) en el espacio vectorial definido por las
funciones uk(s).
7.3 Diagonalización simultanea de las matrices [Cik] y [Bik].
Dado que las matrices elementales [Cik], [Bik] y [Dik] que conforman el sistema de
ecuaciones diferenciales lineales es altamente acoplado, es necesario realizar el
desacoplamiento mediante descomposición modal. Como la diagonalización
simultánea de [Cik], [Bik] y [Dik] no es posible, se procede a diagonalizar las
matrices [Cik], y [Bik]. En el caso isotrópico, los elementos que no pertenecen a la
diagonal son muy pequeños respecto a los elementos que sí pertenecen, por lo
que se les considera despreciables.
La diagonalización simultanea de las matrices de rigidez de warping
(desplazamiento axial) y de flexión, [Cik] y [Bik] respectivamente, implica los
siguientes pasos:
a. Solución del problema de valores propios:
0ik ik kB C u (7.32)
Donde se obtiene 1 4 0 y 1 5 0n , los cuales dan lugar a:
i) n - 3 diferentes vectores propios uk(s) (k = 5, …, n+1) (Modos de
Distorsión)
ii) Un espacio 4- dimensional definido por 4 vectores propios,
asociado a los modos de cuerpo rígido (extensión, flexión
alrededor del eje mayor y menor y torsión) y ortogonales a los
otros n-3 vectores propios. Los vectores propios que definen este
espacio vectorial están asociados a valores propios nulos. Esto
origina un infinito número de correctas soluciones. Por lo que en
estos vectores, los modos de cuerpo rígido se encuentra
mezclados o acoplados; [Cik]4x4 se encuentra totalmente llena.
b. Identificación del vector 4 ( )u s , relacionado al modo torsional, teniendo en
cuenta que la sub matriz D4x4 de la matriz de rigidez a la torsión Dik es
diagonal con 44 0D y 11 22 33 0D D D . Para ello se realiza una
diagonalización mediante el método de Jacobi involucrando a las
matrices [Cik]4x4 y [Dik]4x4. Mediante esto se logra separar el vector 4 ( )u s ,
dejando los vectores u1 a u3 aun acoplados.
c. Identificación de los vectores 1 3( )u s , usando para ello la submatriz 3x3
de segundo orden [Kjik], el cual es diagonal con 22 0K , y 33 0K .
Finalmente el sistema definido por los vectores propios ( )ku s da a lugar a
las matrices diagonales ikC y ikD
totalmente definidos.
Donde: j
jik i j i k
s jj
tuK v v w w ds
C
De esta manera, se desacopla el sistema (7.21) obteniéndose las matrices [Cik],
[Bik] y [Dik] diagonales, en donde sus elementos poseen significado mecánico.