Permission is hereby granted to the University of Alberta Libraries to reproduce single copies of this thesis and to lend or sell such copies for private, scholarly or scientific research purposes only. Where the thesis is
converted to, or otherwise made available in digital form, the University of Alberta will advise potential users of the thesis of these terms.
The author reserves all other publication and other rights in association with the copyright in the thesis and,
except as herein before provided, neither the thesis nor any substantial portion thereof may be printed or otherwise reproduced in any material form whatsoever without the author's prior written permission.
Examining Committee Dr Venkata Dinavahi, Electrical and Computer Engineering Dr John Salmon, Electrical and Computer Engineering Dr Behrouz Nowrouzian, Electrical and Computer Engineering Dr Walid Moussa, Mechanical Engineering Dr William Rosehart, Electrical and Computer Engineering, University of Calgary
To my Grandpa
Haaj Jalil Jalili-Marandi and
my Parents for their Everlasting Supports
Abstract
Transient stability analysis is necessary for the planning, operation, and control of power
systems. However, its mathematical modeling and time-domain solution is computation-
ally onerous and has attracted the attention of power systems experts and simulation spe-
cialists for decades. The ultimate promised goal has been always to perform this simula-
tion as fast as real-time for realistic-sized systems.
In this thesis, methods to speedup transient stability simulation for large-scale power
systems are investigated. The research reported in this thesis can be divided into two parts.
First, real-time simulation on a general-purpose simulator composed of CPU-based com-
putational nodes is considered. A novel approach called Instantaneous Relaxation (IR) is
proposed for the real-time transient stability simulation on such a simulator. The moti-
vation of proposing this technique comes from the inherent parallelism that exists in the
transient stability problem that allows to have a coarse grain decomposition of resulting
system equations. Comparison of the real-time results with the off-line results shows both
the accuracy and efficiency of the proposed method. It is demonstrated that a power sys-
tem with 80 synchronous generators and 312 buses can be successfully modeled in detail
and run in real-time for the transient stability study by using 8 nodes of the PC-cluster
based simulator.
In the second part of this thesis, Graphics Processing Units (GPUs) are used for the first
time for the transient stability simulation of power systems. Data-parallel programming
techniques are used on the single-instruction multiple-date (SIMD) architecture of the GPU
to implement the transient stability simulations. Several test cases of varying sizes are
used to investigate the GPU-based simulation. The largest system that was implemented
on a single GPU consists of 1280 buses and 320 generators all modeled in detail. The
simulation results reveal the obvious advantage of using GPUs instead of CPUs for large-
scale problems.
In the continuation of part two of this thesis the application of multiple GPUs running
in parallel is investigated. Two different parallel processing based techniques are imple-
mented: the IR method, and the incomplete LU factorization based approach. Practical
information is provided on how to use multi-threaded programming to manage multiple
GPUs running simultaneously for the implementation of the transient stability simula-
tion. The implementation of the IR method on multiple GPUs is the intersection of data-
parallelism and program-level parallelism, which makes possible the simulation of very
large-scale systems with 7020 buses and 1800 synchronous generators.
Acknowledgements
I would like to express my sincere thanks to my supervisor Dr. Venkata Dinavahi for his
full support, patience, and guidance giving me throughout my research at the University
of Alberta. This thesis would not have been possible without encouragements and enthu-
siasms he created in me. He taught me the discipline of true research.
It is an honor for me to extend my gratitude to my PhD committee members Dr. Don
Koval, Dr. John Salmon, Dr. Behrouz Nowrouzian, Dr. Walied Moussa, and Dr. William Rose-
hart who read my thesis and gave me invaluable comments to improve and modify it.
Special thanks go to my colleagues and friends at the RTX-Lab: Babak Asghari, Md Omar
Faruque, Yuan Chen, Aung Myaing, and Lok-Fu Pak.
The PhD degree is not just about the research, and I would like to acknowledge all my
friends that I had their companionship during these years. I was lucky to have Aaron Ev-
CPU Central Processing UnitCUDA Compute Unified Device ArchitectureGPU Graphics Processing UnitILU Incomplete LUIR Instantaneous RelaxationMIMD Multiple-Instruction-Multiple-DataRTW Real-Time WorkshopSFU Special Function UnitSIMD Single-Instruction-Multiple-DataSM Streaming MultiprocessorSP Stream ProcessorTPC Thread Processing ClusterWR Waveform RelaxationXHP eXtra High Performance
1Introduction
Electric power systems are large and complex. The complexity of power systems arises
from the interactions of several devices that are involved in the system such as generators,
transmission and distribution networks, and electrical loads. The generators are intercon-
nected via the transmission lines and cover vast geographical areas. Continuous growth
in electricity demand and consequent expansion of the power systems are creating newer
and larger problems. Therefore, power engineers are always exploring methods for quick
and efficient solutions for these problems.
Maintaining system stability is very important in order to have a secure and continuous
operation of the power system. Loss of supply following system instability would result in
massive economic losses to both the power producers as well as customers. Dynamic sta-
bility analysis preforms simulations of the impact of potential electric grid fault conditions
after a grid disturbance (contingency) in a transient time frame, which is normally up to
about 10 seconds after a disturbance. When a grid is subjected to a disturbance, active and
reactive powers of generators oscillate for a few seconds following the disturbance. These
oscillations must be damped out to regain a stable operating condition. Contingency con-
ditions studied include “normal” transmission line outages and/or power plant outages
caused by acts of nature or equipment (e.g., due to lightning), “wear and tear” (e.g., equip-
ment age failures) and outage conditions caused by human error or potential equipment
failures. Any specific contingency simulation analysis can take several minutes of com-
puter time, even when simulating only a few seconds of grid response after a “what if”
1
disturbance. Thus, analyzing hundreds or more of such “what if” contingencies can take
hours of calculations [1].
A major issue facing the electric utility industry today is to perform the aforementioned
calculations for a large-scale power system in a much shorter time interval so that the cal-
culations can be performed on-line as changes occur based on real-time data, rather than
performing the calculations off-line during days, weeks or even months ahead of time.
This large amount of computer time occurs because the transient phenomena have to be
calculated over a 5 to 10 seconds time interval for a large interconnected power system
based on detailed dynamic mathematical models of grid components. These analyses are
currently conducted off-line since the simulation must be run for each condition of a large
set of all contingency conditions that might occur. Using a software tool developed by
EPRI [2], the computer time to perform hundreds of contingency simulations was reduced
to about 20 to 30 minutes. However, improved numerical methods and computer systems
are still needed today, to reduce this computational time to less than 5 to 10 minutes. This
will meet the requirements for the promised real-time dynamic stability analysis, which
could then become a powerful tool for system operation. By using such a tool in the en-
ergy management centers the operators would quickly evaluate a large number of poten-
tial harmful contingencies and determine which ones could cause unacceptable system
instabilities. Thus, operators would have the opportunity to figure out appropriate con-
trol actions that could prevent the grid from having a regional or multi-regional cascading
blackout.
1.1 General Terms and Definitions
In this section1 the important terms used in this thesis are defined to clearly identify the
scope of work done in this research.
1.1.1 Transient
The IEEE Standard Dictionary defines a transient phenomena as [3]:
Pertaining to or designating a phenomenon or a quantity that varies between two consecutive
steady states during a time interval that is short compared to the time scale of interest. A transient
can be a unidirectional impulse of either polarity or a damped oscillatory wave with the first peak
1Material from this section has been published: V. Jalili-Marandi, V. Dinavahi, K. Strunz, J. A. Martinez,and A. Ramirez, “Interfacing techniques for transient stability and electromagnetic transient programs,” IEEETrans. on Power Delivery, vol. 24, no. 4, pp. 2385-2395, Oct. 2009.
2
occurring in either polarity.
Overvoltages due to lightning and capacitor energization are examples of events that
cause impulsive and oscillatory transients, respectively. Some of the most common types
of transient phenomena in power systems include energization of transmission lines, switch-
ing off of reactors and unloaded transformers, linear resonance at fundamental or at a
harmonic frequency, series capacitor switching and sub-synchronous resonance, and load
rejection [4].
1.1.2 Stability
From a system point of view there exist several types of stability definitions such as:
Lyapunov stability, input-output stability, stability of linear systems, and partial stabil-
ity [5]. Kimbark has classically defined stability related to power systems in [6], however,
this definition was restricted to synchronous machines, and their being “in step”. The
IEEE/CIGRE Joint Task Force on Stability Terms and Definitions [5] adopted the following
definition:
Power system stability is the ability of an electric power system, for a given initial operating
condition, to regain a state of operating equilibrium after being subjected to a physical disturbance,
with most system variables bounded so that practically the entire system remains intact.
Instability in power systems can be caused by either small or large disturbances. Dur-
ing a small disturbance the set of equations which describe the perturbed power system
can be linearized; however, during the large disturbance these equations cannot be lin-
earized for the purpose of analysis [7]. Typical examples of small disturbances are a small
change in the scheduled generation of one machine, or a small load (say 1/100 of system
capacity or less) disconnected or added to the network [8, 9]. Severe perturbations such as
short-circuit faults and loss of generation events are representative of large disturbances.
Additionally, phenomena which cause instability problems in power systems have been
sub-classified based on their duration. Two types of time frame are recognizable: short
term and long term. The period of interest to stability assessment of a network perturbed
by a short term instability event is in the order of few seconds (3 to 20 seconds); however,
this time span extends to several or many minutes for the long term one [5].
1.1.3 Transient Stability
Power system stability phenomena can be categorized into three major classes: rotor angle
stability, voltage stability, and frequency stability. If an interconnected network has been
3
subjected to a perturbation; the ability of this power system to keep its machines in syn-
chronism, and to maintain voltages of all buses as well as the frequency of the whole net-
work around the steady-state values is the basis for the above mentioned classification [10].
Each form of stability phenomena may be caused by a small or large disturbance.
Although in the literature the term transient stability has been used to refer to the large-
disturbance rotor angle stability phenomenon [7, 8], some authors have used this term as
a general purpose stability study of the given network with a particular disturbance se-
quence [11]. The IEEE/CIGRE task force report has categorized both the small and large
disturbance rotor angle stability phenomena as short-term events. Furthermore, it recom-
mends the term transient stability for large-disturbance rotor angle stability phenomenon,
with a time frame of interest in the order of 3 to 5s following the disturbance. This time
span may increase up to 10-20s in the case of very large networks with dominant inter-area
swings [5].
The complete power system model for transient stability analysis can be mathemat-
ically described by a set of first-order differential equations and a set of algebraic equa-
tions. The differential equations model dynamics of the rotating machines while the alge-
braic equations represent the transmission system, loads, and the connecting network [12].
Chapter 2 provides details of the basic approach and numerical methods required for the
solution of the transient stability problem.
A complete description of the power network dynamic behavior requires a very large
number of equations. For instance, consider a realistic inter-connected power system
which includes over 3000 buses and about 400 power stations which are feeding 800 loads.
Assuming that the transmission system and loads are modeled by algebraic equations, and
the generation stations are modeled by a set of 20 first-order differential equations each.
The transient stability analysis of the described network needs solving of 8000 differential
equations and about 3500 algebraic equations [9,13]. To make this solution as time-efficient
as possible usually a time-step in the range of a few milliseconds is chosen for the simula-
tion. In transient stability studies it is assumed that voltage and current waveforms more
or less remain at power frequency (60 or 50 Hz). Thus, for modeling the electrical parts of
the power system steady-state voltage and current phasors can be used. Moreover, tran-
sient stability study is a positive-sequence single-phase type of analysis [4, 14].
4
1.1.4 Real-Time Simulation
The term “real-time” has been traditionally used by the computer industry to refer to in-
teractive systems where the computer response is sufficiently fast enough to satisfy human
users. A more rigorous definition is applied to digital control schemes where the computer
response must occur at specific time intervals. In the case of power system simulation, this
implies that the computer must solve the model equations within the model time step [15].
In general, real-time digital simulation may be defined as a faithful reproduction of output
waveforms, by combining systems of hardware and software, that would be identical to
the waveforms or effects produced by the real power system being modeled. Depending
on the time taken by the computer to complete the computation of state outputs for each
time-step two situations can arise. As shown in Figure 1.1(a), if the execution time, Te, for
the simulation of any time-step is smaller or equal to the time-step used, the simulation is
said to be real-time simulation. On the other hand, as shown in Figure 1.1(b), if Te for any
time-step is greater than its time-step, the simulation is said to be non-real-time or off-line
and in that case, execution time overruns take place. If such a situation is observed, the
simulation time-step should be increased or the system model should be modified to fit
the execution time within the time-step.
Analog scaled-down simulator also known as Transient Network Analyzers (TNAs),
were the predecessors of fully digital real-time simulators. However, realization of large-
scale power systems with a high level of complexity, non-linearity, and sophisticated dy-
namic elements using TNAs is practically impossible [16]. Real-time digital simulation is a
state-of-the-art technique for simulation of power systems and their components. During
the last ten to fifteen years, significant efforts have been made to develop real-time digital
simulators of power system networks. Developments of high speed computers and other
devices accelerated the research in this area. The approach in digital simulation provides
accuracy in component modeling and flexibility in component interconnection for repre-
sentation of a power system. The system is modeled with the help of a software using
graphical interface on a workstation or a personal computer (PC) and then simulated on a
powerful parallel processor based PC cluster.
Real-time simulation can be classified into two categories [17]: (1) Fully digital real-
time simulation and (2) Hardware-In-the-Loop (HIL) real-time simulation. A fully digital
real-time simulation requires the entire system (including control, protection and other ac-
cessories) to be modeled inside the simulator and the simulation to be completed within
5
tn tn+1 tn+2
real-time
clock
fixed time-step
simulator
time
overrun
fixed time-step
idle
time
execution
time: Te
simulator
time(a)
(b)
Figure 1.1: (a) Real-Time and (b) Non-Real-Time or Off-Line simulation.
the specified time-step. In this type of simulation, no I/Os or external interfacing is nec-
essary (except those required for monitoring the simulation results). On the other hand,
Hardware-In-the-Loop (HIL) simulation refers to a simulation, where parts of the fully dig-
ital real-time simulation have been replaced with actual physical components. In this case,
the simulation proceeds with the device-under-test connected through input and output
interfaces such as filters, Digital-to-Analog (D/A) and Analog-to-Digital (A/D) convert-
ers, signal conditioners etc. The simulation can also be modified with the user defined
control inputs, for example closing or opening of switches to connect or disconnect the
components in the simulated power system.
Fully digital simulation is often used for the understanding of behavior of a system un-
der certain circumstances resulting from external or internal dynamic influences, however,
HIL simulation is used to minimize the risk of investment through the use of a prototype
once the underlying theory is established with the help of fully digital real-time simula-
tion. Fully digital simulation is the type of real-time simulation that is used in this thesis.
1.2 Literature Review
Transient instability has long been recognized as the dominant problem in power system
operation. It has been extensively studied since the 1920s and a lot of knowledge and expe-
rience is available in the literature [5]. Transient stability study is important for planning,
design, operation, control, and post-disturbances analysis in power systems [10].
6
From the system theory viewpoint, power systems transient stability is a strongly non-
linear problem. To assess it accurately, first it should be mathematically described by a set
of differential-algebraic equations (DAEs) as follows:
x = f(x,V, t) (1.1)
0 = g(x,V, t) (1.2)
x(t0) = x0 (1.3)
where x is the vector of state variables, x0 is the initial values of state variables, and
V is the vector of bus voltages. Equation (1.1) describes the dynamic behavior of the sys-
tem, while equation (1.2) describes the network constraints on (1.1). Solution of these
equations in time-domain requires employing numerical integration methods. Histori-
cally, time-domain methods have been used even before the advent of numerical comput-
ers where calculations of simplified or reduced versions of the system dynamic equations
were carried out manually to extract the machines’ rotor angle evolution with time, known
as swing curves [18]. Another approach of evaluating transient stability is a graphical
method, popularized in 1930s, as known as “equal-area criterion”. This method deals with
a one-machine system connected to an infinite bus or any two-machine system, whether it
actually has only two machines or more than two machines reduced to two-machine equiv-
alent. The method studied stability by using the concept of energy. The equal-area method
is still used to provide insight into the physical concept of the transient stability phenom-
ena, and for evaluating the various system parameters [19, 20]. Further information about
other types of approaches that have been developed based on the energy concept is avail-
able in [21].
Exploring the transient stability literature reveals that the efforts on the acceleration of
the simulation have been twofold. One is on the algorithms and numerical method, and
the other is on the hardware architecture. From the algorithm viewpoint there has been
extensive research done on solving equations (1.1) and (1.2) with accuracy and efficiency.
The overall solution can be classified into two groups [12]: partitioned and simultaneous
solution approaches. In the partitioned solution the differential equation set (1.1) is solved
separately for the state variables and the equation set (1.2) is solved for the algebraic vari-
ables, and these solutions are then alternated. In the simultaneous approaches, however,
an implicit integration method converts the (1.1) into a set of algebraic equations, and then
this set is lumped into the (1.2) resulting in a larger set of algebraic equations including all
7
the variables. In each of these approaches one can use various type of integration meth-
ods. The explicit Runge-Kutta [22], predictor-corrector method [23], implicit multi-step
integration [24] are some example methods that have been exploited for the partitioned
approaches. For the simultaneous approaches the multi-step integration methods and the
trapezoidal rule have been used widely [25, 26].
The complexity of power systems simulation has increased with the system size. It
was found that a single computer cannot handle the simulation of ever expanding power
systems since it is time critical. Therefore, the need for parallel processing in the transient
stability simulation of realistic systems was recognized to reduce computational complex-
ity. The diakoptics method introduced by Kron [27] tears the problem into several subtasks
that can be run concurrently on parallel computers. In parallel-in-space [28] and waveform
relaxation [29] methods the system is decomposed into smaller subsystems and the com-
putation is allocated to parallel computers. There are also parallel-in-time methods [30,31]
which concurrently solve multiple time steps on parallel processors. While parallel pro-
cessing usually refers to simulation techniques in which closely coupled processors are
simultaneously working on the transient stability computation, the concept of distributed
processing employs a number of loosely coupled and geographically distributed computers
to simulate large-scale power systems [32].
From the hardware point of view several types of MIMD (Multiple-Instruction Multiple-
Data) and SIMD (Single-Instruction Multiple-Data) parallel architectures [33] have been
employed to accelerate transient stability simulation. Supercomputers [34], multiprocessor
networks [35, 36], array-processors [37, 38], and PC-cluster based real-time simulators [39]
all have been examined and reported for this application. Although these hardware-based
approaches helped to speed-up the simulations, they were stymied by significant draw-
backs. The cost of the supercomputers, communication issues and difficulties in the control
of multiprocessor-based systems, difficulties in the programming and required algorithms
for fitting in array-processors, and limitation on maximum system size of the simulated
networks in real-time simulators are some of the noteworthy bottlenecks which limited
their widespread application.
The new capability of the modern GPU, as a massively parallel processor, for gen-
eral purpose high performance computation is the beginning of a new era in computing
science. Although at first glance the SIMD architecture of the GPUs and that of array-
processors might look similar, there are significant differences between these two technolo-
gies. Moreover, issues related to processing elements’ communication overhead, program-
8
ming complexity, and cost effectiveness have been solved for the GPU [40]. The advantages
of modern GPUs, the demand for fast simulation, and the structure of the transient stabil-
ity computation makes the GPU very suitable for this application.
1.3 Motivation for This Work
In power system operations, the operators strive to operate the systems with a high degree
of reliability. Reliability refers to the ability of the system to supply adequate electricity
service on a nearly continuous basis, with few interruptions over an extended time pe-
riod [5]. The key to have a reliable system operation is to maintain satisfactory security at
all times. Unlike reliability that is measured as performance over a period of time, security
refers to the degree of risk in a power system’s ability to survive contingencies without
interruption to customer service at any instant of time. The security of a power system
can be assessed by simulating potential disturbances and determining if the disturbances
will cause any adverse impacts that could result in unsafe condition in the network. How-
ever, in many cases a “static security assessment” or “static contingency analysis” can not
achieve the necessary security under changing grid and generation conditions. For this
purpose the “dynamic security assessment” (DSA) tools are employed, which take a snap-
shot of the system condition, perform comprehensive security assessment, and provide
operators with warning of abnormal situations as well as remedial recommendations. The
main objective of DSA tools is to determine if the system can tolerate a set of major contin-
gencies, which falls under purview of transient stability analysis [41].
The need of real-time assessment of dynamic stability analysis was highlighted by the
recent black out in USA (August 14, 2003) and Italy (September 28, 2003). The August 14
black-out in USA and Canada affected 50 million people. It took a day to restore power to
New York City, and almost two days to restore power to Detroit. The Italian black-out, the
worst blackout in Europe that affected 57 million people, started with 6545 MW import to
Italy. In less than 3 minutes cascading phenomena isolated the Italian system from Europe,
loss of generation in Italy and insufficient load shedding resulted in system black-out. The
phenomena occurred in less than 3 minutes, but it has been proceeded by about 15 min-
utes within which the problem evolved from a normal situation to an alert and then to an
emergency state with a restoration time of 19 hours. A list of evolving factors was collected
from which it was identified that improved power system monitoring and preventive ac-
tions are the most important items [42]. Presently, in most utilities, the dynamic security
9
analyses are conducted by off-line studies. However, there is an increasing demand for fast
and real-time simulations which can be incorporated within the energy management sys-
tem to determine the critical system limits based on the current conditions of the system.
This is a particular application where speed of simulation is vital.
The need to accelerate transient stability simulations for realistic size power systems is
the main driving force for this research. The speed of transient stability simulations can be
improved by three approaches:
• Developing new algorithmic methods
• Exploiting parallel and distributed processors
• Utilizing faster processors
While the transient stability simulation tools have been improved over the last two
decades, the improvement has been mainly made in the modeling complexity and user
friendliness rather than in the structure of the algorithm. It was predicted in 1993 that
the impact of new mathematical methods or algorithms in power system analysis will be
at best evolutionary and not revolutionary [43]. It was a true prediction at least for the
transient stability simulation. Although adaptations such as dishonest Newton-Raphson,
innovations such as sparsity handling and optimal ordering, and efficient coding brought
computer analysis of large-scale power systems into practical use, the basic time domain
algorithm for transient stability simulation remained the most reliable method for the com-
mercial and industry software developers [44]. Therefore, after many years of experience
in the transient stability simulation methods, as described in the literature review, no one
expects that a novel approach on a single processor could significantly alleviate the simula-
tion time, unless it somehow exploits a specific hardware architecture. Against the gradual
improvements of the algorithmic methods, the hardware improvements have been revo-
lutionary. These improvements includes processor architecture design, such as evolving
multi-core CPUs and GPUs, the processor’s speed, and advancements in the peripheral
technology such as storage devices and communication equipment.
This thesis aggregates all three aforementioned approaches to accelerate of transient
stability simulation of large-scale power systems. A novel algorithmic method is pro-
posed and implemented on two different types of processors. One is a general purpose
CPU-processor based state-of-the-art real-time digital simulator, and the other is the mas-
sively parallel Graphics Processing Unit (GPU). The CPU-based processor has a sequential
architecture, while GPU has a data-parallel design.
10
1.4 Thesis Objectives
The previous sections gave a glimpse of the transient stability problem and the wide efforts
made in this area. It can be concluded that in the transient stability analysis fast and reli-
able simulation is never enough and more is always required by the industry. The objective
of this thesis is to investigate the use of parallel processing based approaches to accelerate
transient stability simulation of large-scale systems. To achieve this purpose first we will
focus on the real-time simulation on a PC-cluster real-time simulator by introducing and
implementing a novel method. This can lead us to configure a real-time simulator that is
specifically designed for transient stability analysis, such as existing ones for the electro-
magnetic studies, but one that is much more cost effective. In the second part of this thesis
the use of single and multiple GPUs for the large-scale transient stability simulations is
investigated. It is predicted that GPUs will be at the core of the near future massive com-
putational engines. Therefore, power system software developers should be aware of the
GPU applications in the power system computations and exploit it.
1.5 Thesis Outline
The thesis consists of six chapters. Each chapter discuses a particular topic of relevance to
the thesis and the contributions made are described.
• Chapter 1: Introduction - The general terms used in this thesis are described in this
chapter to highlight the scope of the research. The background work done in this area
since several decades ago is summarized by considering both software and hardware
developing aspects. The applications of transient stability analysis in the planning
and operation of power systems are discussed which justified the need for faster tran-
sient stability simulations. The desire to accelerate the transient stability simulation
for large-scale power systems is the main motivation of this thesis.
• Chapter 2: Parallel Transient Stability Simulation Methods - The purpose of this
chapter is to provide a basis for the thesis. It begins with the transient stability
problem formulation and the standard solution method to model this phenomena
in power systems. However, the focus in this chapter is to review the application of
parallel processing based technology used up to date of preparing this dissertation.
This application includes both the algorithmic aspects as well as hardware advance-
ments.
11
• Chapter 3: The Instantaneous Relaxation (IR) Method - The Instantaneous Relax-
ation (IR) method is introduced and implemented in this chapter. The objective is to
revisit the application of real-time digital simulators to the transient stability prob-
lem. By exploiting the parallelism inherent in the transient stability problem, a paral-
lel solution algorithm can be devised to maximize the computational efficiency of the
real-time simulator. This would reduce the cost of the required hardware for a given
system size or increase the size of the simulated system for a fixed cost and hardware
configuration. To demonstrate the performance of the IR method, three case studies
have been implemented on a PC-Cluster based real-time simulator and the results
are validated by the PSS/E software. Several comparisons verified the accuracy and
efficiency of the IR method.
• Chapter 4: Single GPU Implementation: Data-Parallel Techniques - In this chapter
we discuss GPU-based transient stability simulation for large-scale power systems.
The mathematical complexity along with the large data crunching need in the tran-
sient stability simulation, and the substantial opportunity to exploit parallelism are
the motivations to use GPU in this area. However, since the GPU’s architecture is
markedly different from that of a conventional CPU, it requires a completely differ-
ent algorithmic approach for implementation. This chapter investigates the poten-
tial of using a GPU to accelerate this simulation by exploiting its SIMD architecture.
Two SIMD-based programming models to implement the standard method of the
transient stability simulation were proposed and implemented on a single GPU. The
simulation codes are written entirely in C++ integrated with GPU-specific functions.
• Chapter 5: Multi-GPU Implementation of Large-Scale Transient Stability Simula-
tion - The main goal in this chapter is to demonstrate the practical aspects of utilizing
multiple GPUs for large-scale transient stability simulation. Two parallel processing
based techniques are implemented on a Tesla S1070 unit. The techniques used here
are from tearing and relaxation categories, explained in Chapters 2 and 3. The exper-
imental results revealed that program level decomposition, as it happens in the IR
method, is more efficient than task level decomposition.
• Chapter 6: Summary and Conclusions - The contribution of this research are sum-
marized in this chapter. Some plans for the future work are suggested here.
12
Part I
Real-Time Transient StabilitySimulation on CPU-based Hardware
13
2Parallel Transient Stability Simulation Methods
2.1 Introduction
In Chapter 1, the applications of transient stability analysis in the planning and operation
of power systems are discussed which justified the needs for faster transient stability sim-
ulations. As mentioned, for several decades it was known that the single-processor based
methods are not effective for the simulation of large-scale power systems. Thus, to achieve
substantial improvement in the speed of transient stability simulation parallel processing
approaches have been chosen as the most promising methods. In this chapter we will
discuss the issues related to the parallel simulation of the transient stability on two fronts
(1) parallel processor’s hardware architecture, and (2) parallel processing based transient
stability algorithms.
The chapter starts with the transient stability problem formulation and numerical meth-
ods for solution in the time-domain. Then, it will discuss the general classifications exist-
ing for hardware architecture of the parallel processors, and continue with introducing
state-of-the-art hardware utilized in this thesis. A review of the parallel-processing-based
algorithms for the solution of differential-algebraic equations, (DAEs) and their specific
application for the transient stability problem will be described in the remainder of this
chapter.
14
2.2 Standard Method for Transient Stability Modeling
The AC transmission network responds rapidly to any change in load or network topology.
The time constant associated with the network variables are extremely small and can be
assumed to be negligible in transient stability analysis without significant loss of accuracy
[45]. In transient stability the concern is electromechanical oscillation, that is the variation
in power output of machines as their rotors oscillate. The time constants associated with
the rotors are of the order 1 to 10 seconds. Therefore, the differential equations that are
relevant in this analysis are dominated by those having time constants of this order.
A widely used method for detailed modeling of the synchronous generator for the
transient stability simulation is the Park’s equations with an individual dq reference frame
fixed on the generator’s field winding [8]. The network side, including transmission lines
and loads, is modeled using algebraic equations in a common DQ reference frame. Rep-
resentation of AVR and PSS increases the number of differential equations and hence the
complexity of the model. However, the validity of the dynamic response in a network
with a lot of interconnections and in a time frame of a few seconds highly depends on
the accuracy of the generator model and other components which can have effects on the
dynamics of the system. Realistic interconnected power systems are generally supervised
and maintained regionally by the control centers located in different geographical places.
Therefore, fully detailed models for the transient stability studies are imperative for both
online and offline simulations [46]. In this work the detailed model of synchronous gen-
erator including AVR and PSS is used. Each generating unit is modeled using a 9th order
Park’s model with an individual dq reference frame fixed on the generator’s field wind-
ing [8]. The network, including transmission lines and loads, is modeled using algebraic
equations in a common DQ reference frame. The complete system representation used in
this thesis is summarized here:
1. Equations of motion (swing equations or rotor mechanical equations):
δ(t) = ωR.∆ω(t) (2.1)
∆ω(t) =1
2H[Te(t) + Tm −D.∆ω(t)].
2. Rotor electrical circuit equations: This model includes two windings on the d axis
(one excitation field and one damper) and two damper windings on the q axis.
ψfd(t) = ωR.[efd(t)−Rfdifd(t)] (2.2)
15
ψ1d(t) = −ωR.R1di1d(t)
ψ1q(t) = −ωR.R1qi1q(t)
ψ2q(t) = −ωR.R2qi2q(t).
3. Excitation system: Figure 2.1 shows ST1A type excitation system [47]. This system
includes an AVR and PSS.
v1(t) =1
TR[vt(t)− v1(t)] (2.3)
v2(t) = Kstab.∆ω(t)− 1Tw
v2(t)
v3(t) =1T2
[T1v2(t) + v2(t)− v3(t)].
4. Stator voltage equations:
ed(t) = −Raid(t) + L′′q iq(t)− E′′d (t) (2.4)
eq(t) = −Raid(t)− L′′did(t)− E′′q (t)
where
E′′d ≡ Laq[
ψq1
Lq1+
ψq2
Lq2] (2.5)
E′′q ≡ Lad[
ψfd
Lfd+
ψd1
Ld1].
5. Electrical torque:
Te = −(ψadiq − ψaqid) (2.6)
where
ψad = L′′ad[−id +ψfd
Lfd+
ψd1
Ld1] (2.7)
16
STABK
W
W
sT
sT
1 2
1
1
1
sT
sT
RsT1
1AK
maxFE
minFE
fdE
refV
tE
maxsv
minsv
2v 3v
sv
1v +
+
-
Exciter
Terminal voltage
transducer
WashoutGain
Phase
compensation
Figure 2.1: Excitation system with AVR and PSS [47].
• Step 2. The existing non-linear algebraic equations are linearized by the Newton-
Raphson method (for the jth iteration) as:
J(zj−1) ·∆z = −F(zj−1) (2.28)
where J is the Jacobian matrix, z = [x,V], ∆z = zj − zj−1, and F is the vector of
nonlinear function evaluations.
• Step 3: The resulting linear algebraic equations are solved to obtain the system state.
(4.5) is solved using the LU factorization followed by the forward-backward substi-
tution method.
2.3 Parallel Processor Architecture
A sequential computer with one CPU (central processing unit) includes only one control
instruction unit. Apart from its limitation to single instruction execution at any time, there
were two main obstacles with this technology: slow memory access and fundamental lim-
itations such as overheating with compact circuits. These issues limited the achievable
speed of serial computers even with the growth of the hardware technology. Therefore,
the parallel processing techniques were seriously taken into account as the main alterna-
tive approach. As reported in the IEEE committee report [49]:
“Parallel processing is a form of information processing in which two or more processors to-
gether with some form of inter-processor communication system, co-operate on the solution of a
problem”.
20
In parallel processing the single CPU is replaced by multiple CPUs (even if they are
individually slower than the presumed single CPU) whose overall parallel performance
accelerates the simulation.
Chronologically, there are two famous taxonomies for classification of the parallel pro-
cessing architecture hardware. The first one was made by Flynn [33] in which computing
machines are characterized by the number of simultaneously active instruction and data
streams. The two practically used groups are Single-Instruction Multiple-Data (SIMD)
and Multiple-Instruction Multiple-Data (MIMD) architectures. In a SIMD-based technol-
ogy the parallelism is exploited by performing the same operation concurrently on many
pieces of data, while in the MIMD architecture different operations may be performed si-
multaneously on many pieces of data. The SIMD model works best on a certain set of
problems such as image processing, and MIMD is suitable for general purpose computa-
tion. Vector processors and array processors are examples of the SIMD-based architecture,
multi-processor and PC clusters have an MIMD architecture.
The other taxonomy was made by Gurd [50] in which rather than concentrating on the
number of active instruction streams, the focus is on the relationship between processing
elements and memory modules. Based on this taxonomy there are two classes of parallel
processing architectures: distributed memory, and shared memory. In the former, there is
no memory in the system other than the local memory on each processing element, and the
processors communicate with each other by sending and receiving messages in a network
with topologies such as mesh, ring, or hypercube. An example of these processors is Intel
iPSC/2 hypercube machine which also has been used in the transient stability simulation
of power systems. It consists of a host computer as the cube-manager, and 32 processors
(nodes). Each node is directly connected to only d−1 nodes, where d is the cube dimension.
The host processor loads the execution program into all nodes and sends all the necessary
data to each processor, where the solution is performed in parallel. The results are sent
back to the host. Successful simulation on these machines requires the decomposition of
the problem into loosely coupled tasks and distribute them among the processors. The
communication between nodes is by sending messages.
In the shared memory processors, however, there is a central memory accessible from
any of the processing units, regardless of existing local memory on each processing units.
The common memory is used to make communications between processors in shared
memory architecture. The Alliant FX/8 is an example of these machines that contains 8
Computational Elements and 64MB of shared memory.
21
This dissertation involves two state-of-the-art parallel hardware architecture: PC-Cluster
based real-time simulator, and Graphics Processing Unit (GPU). The former is a CPU-
based simulator whose details on architecture and configuration will be explained in this
section. The architecture of GPU, however, is substantially different from that of the CPU-
based processors. Thus, GPU will be introduced in this chapter, and it will be explained in
detail in Chapter 4.
2.3.1 PC-Cluster Based Real-Time Simulator
The real-time simulator existing in the RTX-LAB at the University of Alberta is manu-
factured by OPAL-RT Technologies Inc. using commercial-off-the-shelf components. It
mainly comprises of two groups of computers known as target nodes, and hosts. Target
nodes are the computational cores which carry out the simulation, and each of them is
powered by a dual 3.0GHz Intel XeonTM processor. Each host is a high-performance com-
puter which has a 3.0GHz Intel Pentium IV CPU to offer fast loading and compilation
of the developed models, and providing the interface between the user and the simulator.
The high-speed communication links connect targets, as well as hosts and targets. External
hardware can also be connected to the simulator via the FPGA-based (Field-Programmable
Gate Array) analog/digital inputs/outputs.
The hardware architecture of the real-time simulator is shown in Figure 2.2. The two
processors, i.e. CPUs, in one target communicate with each other through shared memory.
The targets is also capable of eXtreme High Performance (XHP) mode execution, in which
one CPU is dedicated entirely to the computation while the other CPU is running real-
time operating system tasks and schedulers. Several state-of-the-art computer networking
technologies have been utilized to achieve the best communication throughput:
• Shared memory for inter-processor communication in one target. It has the lowest
latency.
• InfiniBand architecture for inter-target communication. It has low latency (from sev-
eral to several-ten microsecond) depending on communication data size.
• SignalWire which only links adjacent two targets. It has only several-microsecond
level of latency.
• Giga-speed Ethernet which mainly connects between targets and hosts, or among
hosts.
22
Target Cluster
Hosts
External Hardware
External Hardware
Host 1
FPGA 1 (Signal Conditioning)
FPGA n (Signal Conditioning)
Shared
Memory
CPU 1
CPU 2
Cluster Node 2 (Dual XEON)
Shared
Memory
CPU 1
CPU 2
Cluster Node 1 (Dual XEON)
Shared
Memory
CPU 1
CPU 2
Cluster Node n (Dual XEON)
I N F I N I B A N D
L I N K
S I G N A L
W I R E
G I G A B I T
E T H E R N E T
Host 2
Host n
Figure 2.2: Hardware architecture of the RTX-LAB real-time simulator [51].
This high-performance PC-cluster based real-time simulator, which has a shared-memory
MIMD architecture, enables any general purpose parallel processing based simulation and
specifically the digital real-time simulation. Other companies such as RTDS Technologies
Inc. and Hypersim have also manufactured similar real-time using distributed sequential
processors. The philosophy of the real-time simulation, its necessity, and requirement will
appear in the next chapter.
2.3.2 Graphics Processing Unit
Recently, Graphics Processing Units (GPUs), which were originally developed for ren-
dering detailed real-time visual effects in the video gaming industry, have become pro-
grammable to the point where they are a viable general purpose programming platform.
General purpose programming on the GPU (also called GPGPU) is currently getting a lot
of attention in the various scientific communities due to the low cost and huge compu-
23
tational horsepower of the recent GPUs. The use of GPGPU techniques as an alternative
to the parallel CPU-based cluster of computers in simulations that need highly intensive
computations has become a real possibility.
Figure 2.3 illustrates schematic of how the GPU and CPU hardware are connected. As
shown in this figure, GPU is mounted to the PC motherboard similar to the other add-in
peripheral cards. The fundamental idea of the GPU is exploiting the parallel processing.
The GPU executes independently from the CPU but it is controlled by CPU. Application
program running on CPU uses the driver software to communicate with the GPU. The
many-core architecture of GPU, that will be discussed in detail in Chapter 4, is especially
suited for problems that can be expressed as fine-grained data-parallel computations. Ex-
cept the field of image rendering, which GPU was originally designed for, several other
fields from the signal processing and physics simulation to computational finance and bi-
ology have also exploited GPUs to accelerate their simulations.
The modern GPU consists of multiprocessors which map the data elements to the par-
allel processing threads. The multiprocessor creates, manages, and executes concurrent
threads in hardware with zero scheduling overhead. The fast barrier synchronization with
lightweight thread creation and zero-overhead thread scheduling supports fine-grained
parallelism. To manage hundreds of threads the multiprocessors map each thread to one
scaler processor core, and each scaler thread executes independently with its own instruc-
tion. There is a global device memory that all the multiprocessors can have access to. Also,
each multiprocessor has its own on-chip memory that is accessible individually. Overall,
the GPU can be categorized as an SIMD and shared memory processor. However, there are
significant differences between SIMD structure of the GPU and that of the array processors
which will be explained in Chapter 4.
2.4 Parallel Solution of Large-Scale DAEs Systems
A common approach for time-domain simulation of a physical system, described by a set
of non-linear DAE consists of three steps: an integration method (e.g. trapezoidal rule)
for discretizing the differential equations, an iterative method (e.g. Newton-Raphson) for
solving the non-linear algebraic equations, and a linear equation solver such as Gaussian
Elimination and Back Substitution. This traditional approach is referred to as the standard
or direct simulation approach [52]. Both the storage and CPU time required by the standard
approach grow rapidly with the size of the system, measured in terms of its components
24
System Memory
6-15GB/s
PC Motherboard
Processing
ElementsCache40GB/s
CPU Processing
Elements
GPU Memory
20-140GB/s
GPU
1-8GB/s
Figure 2.3: Connection of the GPU to a PC motherboard using the PCIe bus.
(i.e. generators in the case of a power system), increases. The demand for simulating
ever larger systems brought the use of parallel architectures to the forefront of researchers
minds. Clearly, exploitation of such parallel hardware was not possible unless appropriate
software was developed that fits the architecture. Moreover, in a large system of DAEs dif-
ferent variables change at different rates. In the standard approach the integration method
is forced to discretize all the differential equation with the same time-step which must be
small enough to capture the fastest dynamics in the system. As such simulating realistic-
size large-scale systems using the standard approach became very time consuming. To
address these problems, a family of techniques known as domain decomposition was devel-
oped.
Domain decomposition refers to any technique that divides a system of equations into
several subsets that can be solved individually using conventional numerical methods. To
solve a set of non-linear differential-algebraic equations domain decomposition can be ap-
plied at any of the three levels of equations, i.e. differential equations, non-linear algebraic
equations, and linear algebraic equations. In these techniques the system of equations at
each level is viewed as a composition of several subsystems at the same level that have
interaction together. The subsystem is a subset of system variables. When the system is
decomposed into subsystems, the solution of each subsystem is carried out by using the
conventional numerical techniques existed for each level of equations. The advantage of
decomposition techniques is that they are suitable for parallel hardware architectures since
several subsystems can be solved simultaneously.
To describe the structure of a system the notion of the dependency matrix (D) is used.
25
For a system with n equations and n unknown variables, D is an n × n matrix whose
elements are 1 or 0. If the ith equation involves the jth variable, then D(i, j) is 1, otherwise
D(i, j) = 0.
Two different approaches were proposed in the literature to perform domain decom-
position: tearing and relaxation.
2.4.1 Tearing
Tearing (introduced as the diakoptics method by G. Kron [27]) is the approach that takes
advantage of the block structure of the system of equations. For a system of equations
in which the dependency matrix is sparse, i.e. D has a small percentage of 1’s, tearing
can be used to achieve decomposition while maintaining the numerical properties of the
method used to solve the system. The Bordered Blocked Diagonal (BBD) form is one spe-
cific structure suitable for this approach. Tearing decomposition at the level of linear alge-
braic equations can be implemented as the Block LU Factorization method, and at the level
of non-linear algebraic equations as the Multilevel Newton-Raphson method [53].
It should be noted that the computational efficiency of this approach over the standard
approach depends critically on the structure of the system, and it does not increase when
system dependency matrix is dense. However, the numerical properties of the tearing ap-
proach are the same as those of the standard numerical methods applied to the system
without using decomposition. For example, in nonlinear algebraic equations the Multi-
level Newton-Raphson method still has the same local quadratic rate of convergence the
same as that of the conventional full Newton-Raphson method.
2.4.2 Relaxation
Relaxation [54] is an approach which is not restricted to a particular system structure. In
this approach the system is partitioned into a number of subsystems based on either the
system equations or component connectivity. Solving these subsystems is always easier
than solving the original system. Therefore, the complexity will be reduced regardless
of the system sparsity. Within each subsystem the variables to be solved for are called
internal variables and the other variables involving in that subsystem are referred as external
variables, which are internal variables of other subsystems. To solve a subsystem for its
internal variables the values of its external variables are first guessed and then updated
through an iterative procedure.
Two well known iterative schemes used for relaxation decomposition are the Gauss-
26
Gauss-Jacobi
Relaxation
0),,...,,,,...,,( 121211 =uxxxxxxfnn
&&&
0),,...,,,,...,,( 221212 =uxxxxxxfnn
&&&
0),,...,,,,...,,( 2121 =nnnnuxxxxxxf &&&
0),,...,,,,...,,( 1
11
21
11
211 =−−−−uxxxxxxf
k
n
kkk
n
kk&&&
0),,...,,,,...,,( 2
1
2
1
1
1
2
1
12 =−−−−uxxxxxxf
k
n
kkk
n
kk&&&
0),,...,,,,...,,( 1
2
1
1
1
2
1
1 =−−−−
n
k
n
kkk
n
kk
nuxxxxxxf &&&
Gauss-Jacobi
Relaxation
0),,...,,( 1211 =uxxxgn
0),,...,,( 2212 =uxxxgn
0),,...,,( 21 =nnnuxxxg
0),,...,,( 1
11
211 =−−uxxxg
k
n
kk
0),,...,,( 2
1
2
1
12 =−−uxxxg
k
n
kk
0),,...,,( 1
2
1
1 =−−
n
k
n
kk
nuxxxg
Gauss-Jacobi
Relaxation
0... 1121 211 1 =++++ uxxxnn
ααα
0... 2222 212 1 =++++ uxxxnn
ααα
0...2211 =++++nnn nnnuxxx ααα
0... 1
1
1
1
212111 =++++−−uxxx
k
nn
kkααα
0... 22222
1
121 =++++−
uxxxk
nn
kkααα
0...1
22
1
11 =++++−−
n
k
nnn
k
n
k
nuxxx ααα
(b)
(a)
(c)
Figure 2.4: Applying Gauss-Jacobi relaxation at different level of equations: (a) differentialequations, (b) non-linear algebraic equations, (c) linear algebraic equations.
Seidel and Gauss-Jacobi methods [55]. Relaxation can be used at each level of the solution.
Figure 2.4 gives an example of using Gauss-Jacobi relaxation at different levels of equa-
tions. The application of this approach for nonlinear algebraic equations can be found
in [28, 30]. Relaxation can be used at the level of differential equations as well, but it is not
straightforward. In this case, the system is broken into subsystems in a way that the com-
ponents inside of each subsystem (internal variables) are strongly interdependent while
the dependency between components in two different subsystems (internal and external
variables) is weak enough to ignore their interconnection. In other words, the subsystems
can be relaxed. Therefore, each part of the system is still a system of differential equations
but with a smaller size that can be solved in the time-domain using the standard approach.
The relaxation approach applied to the differential equations’ level has been known as the
Waveform Relaxation (WR) method, which is discussed later in this chapter.
2.5 Power System Specific Approaches
The previous section provided a review of the parallel-processing-based computational
approaches for a general case of DAEs describing the behavior of a dynamical system.
This section introduces the ideas and approaches that have been specifically proposed for
27
the transient stability computation. Although, there is no specific classification for these
methods they appear here chronologically.
2.5.1 Diakoptics
In the 1950s G. Kron developed a solution method for large networks called “diakop-
tics” [27]. The basic idea of diakoptics is to solve a large system by tearing it apart into
smaller subsystems. These subnetworks are then analyzed independently as if they were
completely decoupled, and then to combine and modify the solutions of the torn parts to
yield the solution of the original problem. The solution of the entire network can be ob-
tained by injecting back the link currents into the corresponding nodes.The result of the
procedure is identical to one that would have been obtained if the system had been solved
as one.
The advantages of diakoptics were at least twofold. Firstly, larger systems can be
solved efficiently by the use of diakoptics on a given computer by processing the torn parts
through the computer serially. Secondly, diakoptics employs a multiplicity of computers
which essentially operate in parallel, and thus provide more speed of execution than by
the use of a single computer. The computers can be physically next to each other, thus
forming a cluster of computers, or they can be miles apart. Each computer in the latter
application can work on the solution of a given part [56].
2.5.2 Parallel-in-Space Methods
The parallel-in-space algorithms are step-by-step methods based on partitioning the origi-
nal system into subsystems and distributing them among the parallel processors. These
subsystems should be loosely coupled or independent parts. In the literature of tran-
sient stability simulation “parallel-in-space” usually addresses the task-level parallelism
in which serial algorithms are converted into various smaller and independent tasks that
may be solved in parallel. In the transient stability calculation of a large-scale power sys-
tem the obvious part that parallelism can be exploited in is the solution of linear algebraic
equations.
The most significant early work in this area is described in [57] where the Trapezoidal
Rule was used to discretize the differential equations, and then the parallelism was applied
to solve the algebraic equations. The algorithm presented in [58] that uses the Runge-Kutta
method is a typical parallel-in-space approach, which distributes solutions of the nonlinear
equations of each time step into multiprocessors.
28
Suppose the set of differential-algebraic equations that describe the dynamics of the
power system are given as following:
x = f(x,V)
I = Y.V(2.29)
where vectors x and V are the state variables and bus voltages of the system. Applying
the implicit trapezoidal integration method to the differential equations and rearranging
them result in a set of algebraic equations:
F = xk − xk−1 − h2
[fk + fk−1
]= 0
G = I−Y.V = 0(2.30)
Applying the Newton-Raphson method to these equations, we obtain a set of linear
algebraic equations:
[FG
]= −
[J1 J2
J3 J4
] [∆x∆V
](2.31)
where J1, J2, J3, and J4 are the Jacobian coefficient sub-matrices and are defined as
following:
J1 = ∂F∂x J2 = ∂F
∂V
J3 = ∂G∂x J4 = ∂G
∂V
(2.32)
Applying the Gaussian elimination to equations (2.31) we get:
[FG
]= −
[J1 J2
0 J4
] [∆x∆V
](2.33)
where
G = G− J3J−11 F
J4 = J4 − J3J−11 J2
(2.34)
Therefore, equation (2.33) can be decoupled and solved with the Gauss-Jacobi iterative
29
scheme as:
∆V(k) = −J−14 .G(k−1)
∆x(k) = −J−11 (F(k−1) + J2∆V(k−1))
(2.35)
or with the Gauss-Seidel iterative scheme:
∆V(k) = −J−14 .G(k−1)
∆x(k) = −J−11 (F(k−1) + J2∆V(k))
(2.36)
where k is the iteration index. Equation (2.35) and (2.36) can be solved to update V and
x at each time-step. Therefore, the work associated with each time-step can be distributed
among the parallel processors and run simultaneously.
Note that in (2.31) J4 actually is the admittance matrix of the interconnected network,
and J1 is diagonally blocked, i.e.:
J1 = diag [J1i] , i = 1, ..., ngen
where ngen is the number of generators, and obviously:
J−11 = diag
[J−1
1i
], i = 1, ..., ngen
Therefore, the computation of J−11i s can be assigned to parallel CPUs in any order. In the
transient stability simulation different machines may have different models, for example
in a machine using the classical model the corresponding J1i is a 2 × 2 block while for
a machine using a detailed model including exciter and PSS, the corresponding J1i may
reach 9 × 9 or even higher depending on the complexity of the element models. Thus, in
the parallel-in-space simulation, it is important to care about balancing the CPU loads to
achieve better parallel gain.
For improved computational efficiency some variations of the Newton-Raphson’s method
such as Very Dishonest Newton (VDHN) or Decoupled Newton method have been sug-
gested to be used. In VDHN method the Jacobian matrices is held constant unless the
convergence slows down. In [59] authors proposed to keep J4 fixed unless the number of
iterations exceeds a threshold value, convergence slows down, or the system undergoes
topology changes, while other Jacobian sub-matrices, i.e. J1, J2, and J3 are updated at
each iteration.
30
In the Decoupled Newton method, in equation (2.31), the sub-matrices J2 and J3 are
ignored, and equations are directly decomposed as:
∆V(k) = −J−14 .G(k−1)
∆x(k) = −J−11 .F(k−1) (2.37)
To avoid the time consuming matrix inversion operation some parallel iterative meth-
ods have been proposed. The Successive-Over-Relaxation Newton method uses an ap-
proximated Jacobian matrix containing only diagonal elements:
∂fi(z)∂zj
=
∂fi(z)∂zj
i = j
0 i 6= j(2.38)
where z presents both the state and algebraic variables. The iterative equation to obtain
individual z at each time-step can be stated as:
z(k)i = z
(k−1)i − wi
fi(z(k−1)i )
∂fi(z(k−1)i )
(2.39)
where wi is the relaxation factor for the zi. Since it is not desirable to change the algo-
rithm for every case, in [59] authors proposed to use ws = 0.9 for static and wd = 1.9 for
the dynamic variables instead of using different values for each variable.
2.5.3 Parallel-in-Time Methods
Despite the sequential character of the initial value problem which derives from the dis-
cretization of differential equations, parallel-in-time approaches have been proposed for
parallel processor implementation. The idea of exploiting the parallelism-in-time in power
system applications was first proposed in [31] to concurrently find the solution for multi-
ple time-steps. In this method simulation time is divided into a series of blocks that each
of them contains a number of steps that lead to the solution of the system. In other words,
this technique concurrently solves many time-steps. Suppose there is a set of differential
equation in the compact form of (2.40):
x = Ax + f(t) (2.40)
31
In which f is an explicit function of time. Applying the trapezoidal rule to (2.40) results
in a set of algebraic equation:
xk = xk−1 +h
2
[A(xk + xk−1) + fk + fk−1
](2.41)
Rearranging equation (2.41) as:
(I− h
2A)xk = (I +
h
2A)xk−1 +
h
2(fk + fk−1) (2.42)
For each time-step the whole right-hand-side of the equation (2.42) can be explicitly
evaluated to determine the value of xk by solving a set of linear algebraic system. How-
ever, in the parallel-in-time method the vector x is determined for T time-steps simulta-
neously, where T is the number of time-steps for which the output results are required.
Rearranging equation (2.42) for a set of T equations can be written as:
(I− h2A)x1 − (I + h
2A)x0 = h2 (f1 + f0)
(I− h2A)x2 − (I + h
2A)x1 = h2 (f2 + f1)
.
.
.
(I− h2A)xT − (I + h
2A)xT−1 = h2 (fT + fT−1)
(2.43)
where the subscribe denotes the individual time-step. A way of parallelizing this class
of algorithms is to apply Gauss-Jacobi relaxation in order to exploit the parallel-in-time for-
mulation. Therefore T time-steps can be solved simultaneously. A comprehensive research
in this area has been done by M. La Scala et al. [28, 30, 60, 61]
2.5.4 Waveform Relaxation
The Waveform Relaxation (WR) method, was the first attempt to exploit both space and
time parallelism in the transient stability problem. The WR method is an iterative approach
for solving the system of DAE over a finite time span. In this method the original DAE,
which usually has a large scale, is partitioned into smaller weakly coupled subsystems
that can be solved independently. Each subsystem uses the previous iterate waveforms
of other subsystems as guesses for its new iteration. After each iteration, waveforms are
exchanged between subsystems, and this process is repeated until convergence is gained.
This method is based on the Gauss-Seidel or Gauss-Jacobi iterative approaches explained
earlier in this chapter.
32
The WR method was first introduced in [62] for VLSI circuit simulation. The first ap-
plication of the WR algorithm in the power system area was suggested in [63] and with
further development it was used for transient stability study analysis in [64] in 1989.
In [65] the simulation time between the sequential WR method and direct method has
been compared for some study cases. For example, a simulation interval of 2s in a net-
work with 20 synchronous generators (all represented by the classical model) and 118 buses
took 11829.5s and 1403.4s using the direct and sequential WR method, respectively. The
promise of adopting parallel computers to implement the WR method was mentioned
in [65], but the first time that the WR method has been used on a parallel machine was in
1997. In [66] several comparisons have been shown to clarify the efficiency of this method
for parallel processing. For instance, a network with 195 synchronous generators and 970
buses has been modeled on several CPUs existing in a parallel machine. The minimum
achieved execution time (not including communication time) for a simulation interval of
1.02s was 36.61s (for each CPU) in which 12 CPUs have been run in parallel; the time for
the direct method was 689.75s (using one CPU). Although it was a big speedup, but it
is still too far from real-time simulation. The useful outcome resulted from both sequen-
tial [65] and parallel [66] implementations of the WR method is that this algorithm is more
efficient for larger systems.
The general form of DAE in the transient stability study of power systems described
with equations (2.29). The time-domain standard method to solve this set of DAE was
previously described through steps 1, 2, and 3 at the beginning section of this chapter.
However, in the WR method first the system of nonlinear DAEs is decomposed into de-
coupled subsystems, and each subsystem is solved separately for the entire simulation
time interval using waveforms from the previous iteration of the other subsystems. To
achieve the convergence several iterations may be required, where each of the subsystems
exchange waveforms and are then solved with updated data collected from other subsys-
tems. This process is repeated until all waveforms converge with the necessary accuracy.
To describe these explanations mathematically, suppose that equation sets (4.1) and (4.2)
can be partitioned into r weakly coupled subsystems as equations (2.44):
33
No
No
Yes
Yes
START
0k
1i
Guess for all
Waveform , such that
Waveform , such that
],0[ Tt
)(txk )0()0( xx
k
)(tVk )0()0( VV
k
Solve for all ],0[ Tt1 1 1 1
1 1 1
1 1 1
1
( ) ( ... ... ; ... ... ; ... ... )
( ) ( ... ... ).
k k k k k k k k k k
i i i r i r i r
k k k k k
i i i r i
x t f x x x V V V I I I
I t Y x x x V
i r
Waveform
converge?
STOP
1ii
1kk
Figure 2.5: The Gauss-Jacobi WR algorithm; k: the number of iteration, i: the number ofsubsystem.
x1 = f(x1...,xr; V1...,Vr; I1..., Ir)
I1 = Y (x1...,xr).V1
.
.
.xr = f(x1...,xr; V1...,Vr; I1..., Ir)
Ir = Y (x1...,xr).Vr
(2.44)
The WR method can be based on either Gauss-Jacobi or Gauss-Seidel algorithms. The
flowchart of Gauss-Jacobi WR algorithm for a time interval of [0, T ] is depicted in Figure
2.5. As can be seen, in each iteration each subsystem is being solved independently of other
34
HL 5.0
Vvi
10
5.0R
FC 1Cv
i
Figure 2.6: The RLC circuit.
subsystems. Thus, this method can be implemented on parallel CPUs, so that each CPU
solves one of the subsystems. In the Gauss-Seidel based WR method, the ith subsystem
uses the current iterate waveform from subsystems (1, ..., i − 1) and the previous iterate
waveforms from subsystems (i+1, ..., r) as inputs. This algorithm is therefore sequential in
nature. In both algorithms, the subsystems are discretized and solved independently. The
method exploits time parallelism over the simulation period since subsystems are solved
concurrently. The space parallelism also is inherited due to the system decomposition
shown in equations (2.44).
To show the procedure of the WR method and its related issues a simple example will
be demonstrated here. Consider the RLC circuit shown in Figure 2.6, in which the switch
is closed at t = 0, and vc(0) = 0. By choosing the voltage of capacitor (vc) and the current
of inductor (i) as the state variables, the mathematical description of this circuit would be
as follows [67]:
i(t) = 20− 2vc(t)− i(t) (2.45)
vc(t) = i(t) (2.46)
The voltage waveform resulting from the solution of this set of ordinary differential
equations (ODEs) achieved from the direct method has been plotted in Figure 2.7 by the
solid line. To apply the WR method to this system first it must be broken into subsys-
tems. In this example there are two differential equations; thus, the system is divided into
two subsystems. Subsystem I includes the equation (2.45) and Subsystem II includes the
equation (2.46). Applying a Gauss-Jacobi iterative scheme, in the kth iteration the Subsys-
tem I is being solved by considering v(k−1)c and Subsystem II is being solved by taking
i(k−1). After computations are done over the given simulation time interval in both sub-
35
k=1
k=2 k=6
k=9
k=10
k=13
k=14
k=15
k=21
k=5
Cap
acit
or
Vo
ltag
e (
V)
Time(s)
Figure 2.7: Response of the RLC circuit for the capacitor voltage, k: the number of WRiterations.
systems, waveforms would be exchanged; then, the two subsystems are ready to be solved
for the next iteration with the new waveform data. This procedure will be continued until
the resulting waveforms converge within required accuracy. In Figure 2.7 the response of
several iterations has been superimposed on the direct method response with dash lines.
As k increases, at the end of each iteration the resulting waveform converges toward the
direct method response more than the previous iteration.
From this example one important property of the WR method can be explained. It
can be observed in Figure 2.7 that as the number of iterations increases, the time inter-
val in which the resulting waveform is close to the exact one becomes larger. In other
words, the method works well for a certain interval, but it is inaccurate outside of this
span. So, instead of applying the method in each iteration over the whole simulation time,
it is more effective to divide the simulation time into small intervals (with the length of
win) and solve equations piece by piece within each interval, as shown in Figure 2.8. This
technique, known as windowing, decreases the number of iterations required within each
interval for achieving the certain accuracy [52]. The complete flowchart of WR method
including the windowing technique is depicted in Figure 2.9. Windowing also reduces the
required memory space, because the iterative waveforms need to be stored only for small
time intervals instead of the whole simulation time [67]. In the large-scale networks if the
36
k=1
k=2 k=6
k=9
k=10
k=13
k=14
k=15
k=21
k=5
Cap
acit
or
Vo
ltag
e (
V)
Time(s)
win
Figure 2.8: Application of windowing technique in the WR method, k: the number of WRiterations, win: window length.
intervals are too small, the advantages of the WR method are lost due to the increase in
communication time among the partitions [29].
The same as other parallel computation algorithms, the first requirement in utilizing
the WR method is to partition the problem into smaller tasks that can be distributed among
the several processors. Partitioning can be classified into fine-grain and coarse-grain. In
the former the problem is divided into many small tasks, and consequently, the commu-
nication between the processors is broad. In the later the problem is divided into a few
but large tasks or subsystems which impose less communication on the processors. Thus,
choosing the partitioning approach, is mainly limited by the parallel processor hardware.
If the available hardware cannot provide a fast capability among its processors, the coarse-
grain method is more preferable. A full section discussing this issue appears in the Chapter
3.
2.6 Power System Partitioning
Various approaches based on criteria such as computation loads, network topology, and
dynamic behavior of the system can be used to partition power system for transient sta-
bility simulation. For example the system can be decomposed to split the computation
burden among parallel processors based on the total number of equations, or by consid-
37
Start
Itr = 1
Updating external waveform
variables for all t in win
i = 1 to n
Computing internal
waveform variables in
subsystem # i for win
Waveforms
converge ?
Itr = Itr + 1
NO
Stop
A
B
YES
Itr < MaxItr
NO
YES
win = 1
win = win + 1
win < k
NO
YES
A
Discretization of
differential
equations
Newton-Raphson
Solution of linear
algebraic
equations
B
Figure 2.9: Flowchart of the WR method for the duration of [0, T ] which is divided intok window intervals. n: the total number of subsystems; Itr: counter of iterations in eachwindow; MaxItr: the maximum allowable number of iterations in each window; win:counter for windows.
ering the complexity of the generator models and the connectivity of the buses. There are
methods based on graph theory for network partitioning for use in the block iterative so-
lution of linear systems. In [68] this technique has been used for load flow study in power
systems.
In the approaches that are based on the system dynamics the coherency characteristics
of the generators are used. To find the coherent generators two methods are available. One
is based on time-domain simulation, and the other method is to use eigenvalue analysis.
The best way of determining generator coherency is through observing the swing curves
generated by numerical integration of the system dynamic equations. In a power network
a pair of generators are called coherent if the difference between their rotor angles (δi and
38
δj) remains constant over time:
δi(t)− δj(t) = ∆δij ± ε 0 < t < T (2.47)
where ∆δij is a constant value, and ε is a small positive number. In case that ε = 0
generators i and j are perfectly coherent. However, in the time-domain approach the com-
putation involved for a large-scale system is intensive because it requires solution of the
system dynamic equations. In [70] the time-domain simulation method to find out co-
herent groups of generators has been described based on two assumptions that coherent
generators are independent from the size of disturbance and also the detailed of model-
ing. These assumptions have been validated based on observations of many simulations.
Therefore, a linearized classical model of the synchronous machines can be used to find out
rotor angle trajectories based on criteria in (2.47). Slow coherency partitioning method, re-
ported in [71], has been applied in power systems. In this method instead of time-domain
simulation, the concept of tow-time-scale model is used to decompose the system. Two
time scales related to difference between the inter-area and local oscillations happening
in a power system following a fault. This approach requires the calculation of modes
and eigenvalues of the given system. In [72] a direct method of coherency determination
through the use of Taylor series expansion of the faulted and post faulted systems has
been proposed. There are also methods that decompose the system based on the concept
of the electrical distance between busbars, and is independent of the systems operating
condition [73]. In this thesis the slow coherency method has been used for partitioning
large-scale systems.
2.7 Types of Parallelism Used in This Thesis
We have used three types of parallelism’s:
• Algorithm-level: This is a top-level or coarse-grain parallelism which happens be-
fore any numerical method starts solving the system equations. It is also known as
program-level parallelism [29]. Here the objective is not to address task definition and
scheduling, but the parallelism inherent in the overall algorithm. The WR method is
an example of this type of parallelism.
• Task-level: In this type of parallelism the traditional serial algorithm is converted
into various smaller and independent tasks which may be solved in parallel. For
39
D.P.
A.P.
D.P.
T.P. A.P. : Algorithm-level Parallelism
T.P. : Task-level Parallelism
D.P. : Data Parallelism
(a) (b)
Figure 2.10: Integrating various types of parallelism: (a) algorithm-level method on a data-parallel hardware, (b) task-level method on a data-parallel hardware.
example, to solve a linear set of equations in the form of Ax = b, the task-level par-
allelism entails decomposing the matrix A into various other matrices that can be
solved in parallel. Using the sparsity related solution methods, or converting matrix
A into a block-bordered diagonal matrix are examples of the task-level parallelism
approach. The parallel-in-space methods explained earlier also falls into this cate-
gory.
• Data-parallelism: This is the most fine-grained type of parallelism that can be used on
the SIMD-based architectures such as vector processors or GPUs. A given problem
must have the capability to be expressed in the data-parallel format in order to take
advantages of the SIMD hardware.
Both the algorithm-level and task-level approaches can take advantage of data-parallelism
techniques as shown in Figure 2.10. In Chapter 5 it will be shown how the proposed
algorithm-level parallel method, i.e. Instantaneous Relaxation, and a task-level parallel
method, known as Incomplete LU factorization, can be implemented on data-parallel ar-
chitecture of GPUs.
2.8 Summary
In this chapter the subject of parallel processing based computation applicable for tran-
sient stability simulation of large-scale power systems has been discussed. To this end
we started with the general classification of parallel processors hardware architectures to
describe two state-of-the-art available processor techniques (PC-Cluster based real-time
simulator and GPUs) in the RTX-LAB. The second portion of this chapter was allocated to
the parallel solution methods for the differential-algebraic equations, and approaches spe-
cific to the transient stability simulation of power systems have been discussed. In Chapter
40
3 the general idea of the WR method suitable for real-time simulation is discussed. How-
ever, the original WR method contains drawbacks which offer serious obstacles for imple-
mentation in real-time space. The proposed approach in this thesis is the Instantaneous
Relaxation method that will be comprehensively described in Chapter 3. As the Instan-
taneous Relaxation and WR methods have a common mathematical background, the WR
method was explained with more details in this chapter to prepare the reader for Chapter
3.
41
3The Instantaneous Relaxation (IR) Method
3.1 Introduction
The objective of this chapter 1 is to revisit the application of real-time digital simulators to
the transient stability problem. As mentioned in the previous chapter, transient stability
simulation of realistic-size power systems involves computationally onerous time-domain
solution of thousands of nonlinear differential algebraic equations (DAE’s). Furthermore,
from the point of view of dynamic security assessment which is required for safe system
operation and control, several transient stability cases need to be run in a short period of
time for analyzing multiple contingencies and to initiate preventive control actions.
Currently available commercial real-time simulators such as RTDS [74], RT-LAB from
OPAL-RT Technologies Inc. [51], and Hypersim [75] address these needs to a large extent
by using multiple racks or clusters of multi-processor architectures. The question that
arises, however, is whether this approach is the most efficient and cost-effective, given the
prevalent practice of using a real-time simulator, originally designed and built for electro-
magnetic transient studies, for transient stability simulations. This is done, of course, using
simpler models and larger time-steps. For example, nominal-pi models are used instead of
frequency-dependent models for transmission lines, and the simulator time-step is chosen
to be in the range of milliseconds instead of microseconds. Nevertheless, there is underly-
ing sequentiality in the electromagnetic transient simulation algorithm [76] that precludes1Material from this chapter has been published: V. Jalili-Marandi, V. Dinavahi, “Instantaneous relaxation-
based real-time transient stability simulation,” IEEE Trans. on Power Systems, vol. 24, no. 3, August 2009, pp.1327-1336.
42
an efficient utilization of the hardware capabilities for transient stability simulation. By
exploiting the parallelism inherent in the transient stability problem, a parallel solution
algorithm can be devised to maximize the computational efficiency of the real-time sim-
ulator. This would reduce the cost of the required hardware for a given system size or
increase the size of the simulated system for a fixed cost and hardware configuration.
In this chapter we propose a fully parallel Instantaneous Relaxation (IR) method for real-
time transient stability simulation. The idea of using relaxation-based solution of DAE’s is
certainly not new and has been explored before. The Waveform Relaxation (WR) method,
described in the previous chapter, was first introduced in [62] for VLSI circuit simulation.
Then in [63] this method was applied to the power systems area and used comprehensively
for off-line transient stability simulation [65]. The classical model of the synchronous ma-
chine was used in these simulations. Although this algorithm was implemented sequen-
tially, it was predicted that it will accelerate the simulation by exploiting parallel proces-
sors [29]. Later in [66] the WR method was implemented on parallel computers.
As will be explained later, although the WR method is a parallel method successfully
implemented for off-line simulations, there are inefficiencies that surface when it is im-
plemented in real-time. Therefore, the IR method which overcomes these limitations is
proposed for real-time implementation.
The chapter begins with a discussion about the obstacles of the WR method for real-
time implementation. The algorithm of the proposed IR method will be explained, and
the approach for partitioning a power system for performing IR method will be discussed.
Real-time simulation results and their comparative analysis with off-line simulations will
be shown at the end.
3.2 Limitations of WR method for Real-Time Transient StabilitySimulation
The WR method was explained in the Chapter 2. The most important advantages of this
method as a parallel-processing application where parallelism happens at the program
level and not at the task level, are:
• it is an inherently parallel method.
• multi-rate integration methods can be used.
• each subsystem can be solved independently
43
1
r-1
2 3
r
Figure 3.1: Partitioning a large system into subsystems.
• subsystems become smaller than the original large system, it takes less time to solve.
• different levels of accuracy for modeling in each subsystem can be used.
Figure 3.1 schematically shows a large-scale power system partitioned into r smaller
subsystems to conduct a parallel simulation by using the concept of WR method. The
outstanding difference between the WR and other classical decomposition methods for
solving linear and non-linear algebraic equations is that in this method during each iter-
ation each subsystem is analyzed for the entire time interval [0, T ]. In other words, the
elements in this technique are waveforms of the variables rather than their instantaneous
values. In each iteration of the WR method each subsystem is solved by using the three
basic steps of the transient stability standard approach for all t ∈ [0, T ].
It was discussed in [67] and [29] that the WR method works well for a certain interval,
but it is inaccurate outside of this span. So, instead of applying the method in each iteration
over the whole simulation time, i.e. [0, T ], it is more effective to divide the simulation time
into k small intervals or windows, i.e. [0, T1], [T1, T2],..., [Tk, T ], and solve equations piece
by piece within each interval. This technique, known as windowing, decreases the number
of iterations required within each interval for achieving required accuracy [52]. Further-
more, windowing reduces the required memory space, because the iterative waveforms
need to be stored only for small time intervals instead of the whole simulation time.
44
The waveform-based property of the WR method is one issue that needs to be changed
for real-time simulation. There are two reasons. First, in real-time simulation and specifi-
cally in hardware-in-the-loop simulation the instantaneous value of each variable at each
time-step is required and not the complete waveforms. Second, if waveforms are going
to be used as numerical elements, all waveforms of the variables such as bus voltages or
generator angles must be computed for the entire simulation interval, say 20s, in the first
time-step of the simulation, say 1ms. Clearly, this is not practical for a large-scale system
with thousands of variables. To overcome this restriction the windowing technique can
be used. So, the whole simulation time is divided into small intervals, and each interval
is computed in one time-step. The time intervals must be small enough so that the com-
putation tasks can be performed during one time-step. Although windowing can help
maintain the waveform property; however, working with waveforms in real-time is not as
efficient as in off-line simulation.
Suppose the simulation interval [0, T ]s is divided into k windows of length m× h mil-
liseconds, h being the time-step. When the simulation starts, all waveforms for the interval
of the first window must be computed during the first time-step. Then, there are two op-
tions. In the first option (Figure 3.2) the real-time simulator is idle during the remaining
length of the first window, i.e. for (m− 1)× h milliseconds, when it just sends out instant
values of variables at each time-step. After this period simulator resumes computation for
the interval of the second window, and again becomes idle. This process is repeated until
the end of simulation time. In the second option, depicted in Figure 3.3, the simulator con-
tinues the computation for each window in the subsequent time-steps while it also sends
out the instantaneous values of variables at each time-step. Therefore, the computation fin-
ishes in k consecutive time-steps, and after that the simulator becomes idle when it sends
out instant values at each time-step. It can be concluded that in both options the simulator
performs the entire computation in k time-steps and then remains idle for (m−1)×k time-
steps. In other words, the computation load has not been distributed among the time-steps
equally. Thus, real-time implementation of the native WR method can be inefficient from
resource utilization point of view.
3.3 Instantaneous Relaxation
To overcome the limitations of the WR for real-time implementation we propose the point-
wise or Instantaneous Relaxation (IR) technique. It is simply the WR method with a window
45
Model
time-line
Simulator
time-line
x0
x1
xT
win1
Waveform
calculation
Sending out
instant values
win2
wink
0 T
Idle Idle Idle
h
m
Figure 3.2: Real-time implementation of the WR method: Option 1.
Model
time-line
Simulator
time-line
x0
x1
xT
win1
Waveform
calculation
Sending out
instant values
win2
wink
0 T
Idle
Xk-1
Figure 3.3: Real-time implementation of the WR method: Option 2.
length of one time-step, i.e. m = 1. It has been verified in the off-line implementation
of WR method that the smaller the length of window, the faster the convergence. On
the other hand, if the window is made too small the overall communication time among
subsystems increases which causes a loss of the advantages of the WR method. However,
the communication latency between computation nodes in currently available real-time
simulators is in the order of a few microseconds. This latency is small compared to the
time-step required for transient stability and can therefore be neglected. Based on the
previous experience with the WR method and the arguments made in the pervious section,
it can be concluded that the IR method not only inherits the advantages of the WR method
but is also efficient from the real-time simulation point of view.
To apply relaxation methods at the level of differential equations the preliminary step
is clustering variables into groups which can be solved independently. This will be specifi-
cally discussed for the transient stability application in the next section. After partitioning
the system into n subsystems, the set of DAE’s equations (i.e. (3.1) and (3.2)) are prepared
46
to describe the dynamics of each subsystem:
xint = f(xint,xext,Vint,Vext, t), (3.1)
0 = g(xint,xext,Vint,Vext, t), (3.2)
where xint and Vint are state and algebraic variables that define the dynamic behavior
of Subsystem i, and xext and Vext are the state and algebraic variables that defining all
subsystems excluding Subsystem i. Therefore, x = xint⋃
xext and V = Vint⋃
Vext are
the set of all state and algebraic variables that describe the original-size system. Using the
Gauss-Jacobi iteration scheme the pseudo code for the GJ-IR method is as follows:
guess initial values for xint and Vint at each subsystem
t=0;
repeat{t=t+1;
for each subsystem solve
xintt = f(xint
t ,xextt−1,V
intt ,Vext
t−1)
0 = g(xintt ,xext
t−1,Vintt ,Vext
t−1)
}until (t>T)
and using the Gauss-Seidel iteration scheme the GS-IR method is as follows:
guess initial values for xint and Vint at each subsystem
t=0;
repeat{t=t+1;
for each subsystem solve
xintt = f(xint
t ,xextt ,Vint
t ,Vextt )
0 = g(xintt ,xext
t ,Vintt ,Vext
t )
}until (t>T)
From the above mentioned algorithms, the obvious difference between GJ-IR and GS-
IR is that in the GS-IR at each time-step the Subsystem i has to wait until Subsystems 1 to
i − 1 get solved, so that Subsystem i can use the last values of the xext and Vext to solve
xint and Vint. However, in the GJ-IR the solution of Subsystem i for the current time-step
47
is fully independent from the solution of other subsystems. Therefore, the GS-IR has a
sequential nature while the GJ-IR is fully parallel that makes it suitable for our purpose.
From now on, in this thesis the IR method refers to the GJ-IR.
To solve each subsystem we first start with discretizing (3.1) that results in a new set of
non-linear algebraic equations. In this work we used the trapezoidal rule as the implicit
integration method to discretize the differential equations as follows:
0 = xi − h
2[f i(xi,Vi, t) + f i(xi,Vi, t− h)
], (3.3)
where i = 1, 2,. . . ,n indicates the subsystem, and h is the integration time-step. (3.2)
and (4.4) can be linearized by the Newton-Raphson method (for the jth iteration) as:
J(zij−1) ·∆zi = −Fi(zi
j−1), (3.4)
where J is the Jacobian matrix, zi = [xi,Vi], ∆zi = zij − zi
j−1, and Fi is the vector of
nonlinear function evaluations. (4.5) is a set of linear algebraic equations that can be solved
with Gaussian Elimination and back substitution method. Benchmarking revealed that a
majority of execution time in a transient stability simulation is spent for the nonlinear so-
lution. By using the IR method, however, and by distributing the subsystems over several
parallel processors, a large-scale system is divided into individual subsystems whose ma-
trix sizes are smaller resulting in faster computations.
To clarify the differences between the WR and IR methods, the flowcharts of IR algo-
rithm is shown in Figure 3.4 which can be compared with Figure 2.9 in Chapter 2. Prac-
tically in the WR method it does not seem efficient to perform several iterations of the
Newton-Raphson. Let the exact solution of a waveform be x(.), and the result of the kth
iteration of the WR method be xk(.). Depending on the length of window some iterations
will be required for xk(.) to converge to x(.); however, the starting iterations for xk(.) are
poor approximations of x(.). Thus, it is superfluous to perform Newton-Raphson itera-
tions for computing a close approximation to xk(.) which itself is a poor approximation of
x(.). The convergence rate of the IR method is higher than that of WR, because its win-
dow length is minimum. Therefore, performing several iterations of Newton-Raphson, as
shown in Figure 3.4, increases the accuracy of IR.
Following the convergence of iterative solutions in all subsystems, the state and alge-
braic variables calculated from the last time-step are updated. The state variable descrip-
tion of generators used in this work was defined in Chapter 1. These state variables and
voltages of generator buses must be exchanged between all interconnected subsystems.
48
Start
t = 0
Updating external
instantaneous variables in all
subsystems using Gauss -Jacobi
i = 1 to n
Computing internal
instantaneous variables in
subsystem # i
t < TYes
Stop
A
B
NO
t = t + h
A
Discretization of
differential
equations
Newton-Raphson
Solution of linear
algebraic
equations
B
Converge?
j = 1
j < MaxItr
NO
NO
YES
YES
j = j + 1
Figure 3.4: Flowchart of the proposed IR method for the duration of [0, T ] with a time-stepof h. j: counter for iterations of the Newton-Raphson; MaxItr: the maximum allowablenumber of iterations for the Newton-Raphson in each time-step.
3.4 Coherency Based System Partitioning for the IR Method
One way to partition a power system for parallel processing is to distribute equal numbers
of generators and buses among the processors. However, this is not an efficient method
because the network buses have different connectivity and the generator models vary in
both size and complexity. This gives rise to the load balancing problem in a parallel multi-
processor simulator architecture. Another option is to split the computation burden among
processors based on the total number of equations; however, this approach will increase
both the programming and communication complexity. A more efficient method is to
partition the system by considering the complexity of the generator models and the con-
nectivity of the buses. In this case, different number of generators and buses are assigned
to parallel processors, and the computation burden is roughly even; however, the draw-
49
back of this method is that it cannot be used for a general-purpose program at least in the
off-line sense [77].
The primary requirement for successfully using the relaxation methods at the level of
differential equations is to divide the system into subsystems in which tightly coupled
variables are grouped together. In [52] it was shown that the WR method will converge
for any chosen partitioning scheme; however, the rate of convergence is highly dependent
on the method of partitioning [29]. In spite of all that, it is important to ask this ques-
tion: is transient stability simulation of a large-scale network by IR method restricted by
this prerequisite? In other words, whether the partitioning scheme’s dependence on sys-
tem modeling or the characteristics of the disturbance such as its severity or location, will
influence the convergence of the IR or WR methods.
Determination of tightly coupled variables or simply partitioning the system can find
a physical meaning from the power system point of view. Following a large disturbance in
the system, some generators lose their synchronism with the network. Thus, the system is
naturally partitioned into several areas in which generators are in step together while there
are oscillations among the different areas. Generators in each of these areas are said to be
coherent. The coherency characteristic of the power system reflects the level of dependency
between generators. Coherent generators can be grouped in the same subsystem which
can be solved independently from other subsystems with the WR or IR methods. The
partitioning achieved using the coherency property has two characteristics which make
it appropriate for our study. The coherent groups of generators are independent of: (1)
the size of disturbance and (2) the level of detail used in the generators. Therefore, the
linearized model of the system and the simple classical model of generators can be used
to determine coherency. Furthermore, slow coherency based grouping is insensitive to the
location of disturbance in the power system [78]. These features of slow coherency lead us
to use this partitioning method in this thesis.
3.5 Implementation of IR Method
The IR method was implemented using a customized MATLAB S-function. S-function is
a computer language description of a SIMULINK block that can be written in either C,
C++, Fortran, Ada, or MATLAB, and it is compiled as a mex file to dynamically link into
MATLAB. The most common use of S-function is to create a custom SIMULINK block.
This block may include a new general purpose application, a hardware device driver, or
50
describing a system as a set of mathematical equation. In our case, the purpose was to
implement the IR method. Thus, we use the S-function to mathematically model the power
system equipments and solve it using the proposed IR method.
The customized S-function block is solved at every time-step assigned by SIMULINK
but the time-step can be changed from outside the S-function in the main model. The
change in time-step can be passed to the S-function structure by defining it as a parameter
of the S-function. The ‘discrete solver’ option is used for the simulation, even though
selection of different solver in SIMULINK does not influence the S-function as the solver
is chosen inside the S-function structure. The models developed in SIMULINK could be
solved with either variable or fixed time-step. Due to the model validation process, only
the fixed-step solver was utilized. In this research we used the C programming language
to prepare the SIMULINK S-function which will be explained in this section.
3.5.1 Building of C-based S-Function
The general structure of the S-function written in C is shown in Figure 3.5. The SIMULINK
S-Function block is invoked at each simulation time-step, and any changes in the S-function
inputs can be passed to it even while the simulation is running. As shown in Figure 3.5
flowchart, the essential functions in C-based S-function to be used are the follows.
Function static void mdlInitializeSizes(SimStruct *S)
This is the first invoked function in the S-function, and it is used to specify the basic char-
acteristics of the block, such as number of inputs, outputs, the port width of each input and
output, and the number of parameters of the S-function block. It is worthwhile to mention
that while the simulation is running, the s-function parameters cannot be changed but its
inputs can be changed. In this case, three input and nine output ports are defined. The in-
put corresponds to external machines ID, and variables that are required to be exchanged
among subsystems.
Function static void mdlInitializeSampleTimes(SimStruct *S)
Sample time of the S-function block is initialized here, which is retrieved from the first
S-function parameter by C function mxGetScalar(ssGetSFcnParam(S, 0)).
51
mdlInitializeSizes
mdlInitializeSampleTimes
mdlStart
mdlOutputs
mdlUpdate
mdlTerminate
START
END
DONE? No
Yes
Figure 3.5: SIMULINK S-function flowchart
Function static void mdlStart(SimStruct *S)
All initializations including the network’s steady state parameters, machines data, and
network’s admittance matrix are placed in this function. The data files in the PSS/E *.raw
file format are read and interpreted, and corresponding models are initialized. Moreover,
in order to reduce computational time in the simulation loop, all admittance matrices cor-
responding to the switching states are uploaded here for future access in simulation loop.
Function static void mdlOutputs(SimStruct *S, int T tid)
This is the function invoked in every simulation loop. Outputs requested to be either
monitored, saved, or exchanged between subsystems are sent to S-function block output.
The outputs are calculated in mdlUpdate function discussed below.
52
Function static void mdlUpdate(SimStruct *S, int T tid)
This is the main function implementing all the transient stability numerical calculations.
Invoked in each time step, the function first reads from the S-function block input the
external variables that need to be updated for the current time-step. Then, in case that the
topology of the network has changed, the appropriate admittance matrix will be loaded.
Hereafter, the right hand side of flowchart shown in Figure 3.4 is run. Finally, this function
calculates requested outputs and saves them to be used by the function mdlOutputs for
S-function block output.
Function static void mdlTerminate(SimStruct *S)
In this function, memory blocks allocated for storing transient stability models are freed to
ensure no memory leakage in the C program.
3.5.2 Off-Line Implementation of the IR Method
To implement the IR method, an S-function block that mathematically models power sys-
tem transient stability computations is developed. This is a general block which can
be specified by setting parameters to model a portion of large-scale power system. To
model the complete system, several of these blocks can be simply placed and connected in
SIMULINK environment. Each block represents a subsystem identified by the partitioning
method such as slow coherency method or geographic partitioning. The required parame-
ters of the current version of the developed S-function block are: the numbers of machines
included in the system and in the individual subsystem, the total number of areas, the ID
numbers of internal and external machines. For instance, suppose a power system is de-
composed into three areas each is represented by an S-function block. Figure 3.6 shows the
top lay-out of a three-area system called Area1, Area2, and Area3. Inside the subsystem
Area1 is depicted in Figure 3.7, where the S-function block is identified by area1. This S-
function block involves three input ports, U, I, and IDs, and nine output ports. The output
ports are of two types: the measuring outputs, which are directly sent to the Monitoring
block in Figure 3.6, to be saved or seen on scopes, as illustrated in Figure 3.8, and the data
outputs, which are sent to the external subsystems, i.e. Area2 and Area3, to update them
by the last computations of Area1.
53
measure_a1
measure_a2
measure_a3
Monitoring
data_a1
data_a2
meas ure_a3
data_a3
Area3
data_a1
data_a3
meas ure_a2
data_a2
Area2
data_a2
data_a3
measure_a1
data_a1
Area1
Figure 3.6: Top lay-out of a three-area decomposed system using developed S-functionblocks in SIMULINK for off-line simulation.
3.5.3 Real-time Implementation of the IR Method
The real-time simulation software package provided by OPAL-RT came in the form of
three MATLAB/SIMULINK based toolboxes:
• ARTEMIS: This toolbox provides additional discretization methods, improved solv-
ing algorithms, and a pre-computation mechanism to boost the overall performance
of the SimPowerSystem (SPS) blockset that was built into MATLAB/SIMULINK.
• RT-EVENTS: This toolbox targets specifically the power electronics modeling, oper-
ation, compensation, and optimization.
• RT-LAB: RT-LAB contains the modules that are required for the pre-compilation of
the source code, RT hardware and software interface, and simulation result acquisi-
tion.
The OPAL-RT software package in the RTX-LAB at the University of Alberta requires
two operating systems: Windows XP on the host computers, and RT Linux on the target
nodes. Power system models could be developed off-line in the SIMULINK graphical en-
vironment on the host. In case those models are not available in SIMULINK, user defined
S-function block can also be incorporated into the models (as explained in the previous
54
2
data_a1
1
measure_a1
area1
S-Function1
[I_a2]
[U_a2]
[I_a1]
[U_a1]
[w]
[Te]
[It]
[Vt]
[U]
[IDs]
[I]
[I_a3]
[U_a3]
[IDs_a2]
[IDs_a3]
[IDs_a1]
[Efd]
[delta]
[I]
[U]
[I_a1]
[U_a1]
[w]
[Te]
[It]
[Vt]
[IDs_a3]
[IDs_a2]
[I_a3]
[I_a2]
[U_a3]
[IDs]
[IDs_a1]
[U_a2]
[Efd]
[delta]
2
data_a3
1
data_a2
Figure 3.7: Placing S-function in subsystem Area1 for off-line simulation.
section). When the model optimizations are completed and verified with off-line simu-
lations, the RT-LAB utility is used to transfer the pre-compiled source code into the RT
Linux operating system, which resides on the nodes of the simulator. The execution of
the loaded model could be directly controlled through the Windows based utility without
dealing with the Linux OS.
The target runs on a Linux based real-time operating system which offers optimized
performance through a single programming environment and direct control of all system
operations by using single kernel design. It offers eXtra High Performance (XHP) mode
operation through CPU shielding where one CPU is dedicated for the simulation while
the other CPU is load with RT Linux operation system to manage data feeding to the
shared memory and to interact with the peripheral hardware. The target is responsible for
real-time execution of the model, data transfer between nodes and the host, and data com-
munication with external hardware through I/Os. The target is also required to compile
source code generated by MATLAB/SIMULINK Real-Time Workshop (RTW) to executa-
bles. The hosts are installed with the RT-LAB software provided by Opal-RT Technologies
Inc. to coordinate all hardware engaged for the simulation. The hosts are mainly used to
create, edit and verify models in SIMULINK, compile SIMULINK blocks into C code by
RTW, control and configure real-time simulations in targets, manipulate model parameters
in real time as well as acquire real-time simulation results.
55
w
delta
VT
IT
VT
Efd
DELTA
TE
IT[It_a2]
[Vt_a2]
[Efd_a2]
[delta_a2]
[w_a1]
[Te_a1]
[It_a1]
[It_a3]
[Vt_a1]
[Vt_a3]
[Efd_a3]
[delta_a3]
[w_a3]
[Te_a3]
[a3]
[delta_a1]
[a2]
[w_a2]
[Te_a2]
[Efd_a1]
[a1]
-1
180/pi
[It_a2]
[Vt_a2]
[Efd_a2]
[delta_a2]
[a1]
[Te_a1]
[It_a1]
[w_a3]
[Vt_a1]
[Te_a3]
[It_a3]
[Vt_a3]
[Efd_a3]
[delta_a3]
[a3]
[a2]
[w_a2]
[w_a1]
[Te_a2]
[Efd_a1]
[delta_a1]
Efd
3
measure_a3
2
measure_a2
1
measure_a1
Figure 3.8: Monitoring and saving outputs of the decomposed system.
A view of the real-time simulator target nodes and the host workstation existing in the
RTX-LAB at the University of Alberta is illustrated in Figure 3.9. Each cluster node consists
of a dual Intel XeonTM shared-memory PC running at 3.0GHz on a real-time Linux op-
erating system. The inter-node communication is through InfiniBand with a 10Gb/s data
transferring rate. As shown in this picture, a model, which in our case is a power system,
can be partitioned and distributed among the cluster nodes. In the case of using multiple
nodes, one node is the Master and other nodes operates as Slaves. The name of the master
subsystem, in the top lay-out of the SIMULINK model, must be prefixed with ‘SM’, and
the name of the slave subsystems must be prefixed with ‘SS’. Moreover, the monitoring
block, where the required outputs are being saved and scopes are placed, must be prefixed
by ‘SC’, as shown in Figure 3.10.
Before compiling the SIMULINK model into C-code, the OpComm block from RT-
LAB/OPAL-RT must be added into the subsystems. OpComm is a communication block
that must be used in subsystems receiving signals from other subsystems, all input ports
must go through this communication block being connected, as shown in Figure 3.11.
56
Figure 3.9: Configuration of the PC-cluster based real-time simulator in the RTX-LAB atthe University of Alberta.
3.6 Experimental Results
In this section we will demonstrate results to verify the efficiency of the IR method for
real-time simulation. To do so we have chosen three case studies. One is the Kundur’s
4 machine and 11 bus system found in [9]. The other case study is the IEEE 39 bus New
England test system [80]. There is also a large-scale power system made case study to fully
occupy the computing capacity of the existing real-time simulator. The real-time results
for these case studies have been validated using the PSS/E software program.
To incorporate IR method S-function blocks into RTX-LAB simulator, all the required
*.c and *.h files, as well as the data files must be transferred to targets in RT-LAB for
real-time simulation. Together with existing C code generated by RTW, all the *.c codes
are compiled by GCC/G++ in targets to generate real-time executables. The complete C
source code of S-function program is demonstrated in Appendix A. To compile the source
code into the MEX-function (executable for MATLAB with extension *.dll in Microsoft
Windows platform), the following command is used for all the S-function codes in MAT-
LAB:
57
data_a1
data_a2
meas ure_a3
data_a3
ss_Area3
data_a1
data_a3
meas ure_a2
data_a2
ss_Area2
data_a2
data_a3
measure_a1
data_a1
sm_Area1
measure_a1
measure_a2
measure_a3
sc_Monitoring
Figure 3.10: Top lay-out of a three-area decomposed system using developed S-functionblocks in SIMULINK for real-time simulation.
>> mex -g area1.c
or
>> mex area1.c
The -g option is used to include debugging information in the MEX-function. More
information on debugging SIMULINK S-function is available in [79].
3.6.1 Case Study 1
Figure 3.12 illustrates the test system used as the first case study. Each synchronous gener-
ator is equipped by an exciter and PSS. A set of 6 differential equations model mechanical
rotation, field winding, and 3 damper windings of each synchronous generator as given
in Chapter 2. The complete system can be described by 36 non-linear differential and 8
algebraic equations. Since generators {1, 2} and {3, 4} are coherent, the system can be par-
titioned into two subsystems. This coherency relation can also be observed later in the
simulation results. These two subsystems are distributed across two cluster nodes as seen
in Figure 3.13. The simulation time-step is chosen to be 1ms. Using the IR method, once
the steady-state has been reached, a three-phase fault at Bus 8 is imposed at t = 5s and is
cleared in 80ms. The real-time simulation results are recorded on an external oscilloscope
58
2
data_a1
1
measure_a1
area1
S -F unction1
OpCommTs = 0.001
OpComm
[I_a2]
[U_a2]
[I_a1]
[U_a1]
[w]
[T e]
[It]
[Vt]
[U]
[IDs]
[I]
[I_a3]
[U_a3]
[IDs_a2]
[IDs_a3]
[IDs_a1]
[E fd]
[delta]
[I]
[U]
[I_a1]
[U_a1]
[w]
[T e]
[It]
[Vt]
[IDs_a3]
[IDs_a2]
[I_a3]
[I_a2]
[U_a3]
[IDs]
[IDs_a1]
[U_a2]
[E fd]
[delta]
2
data_a3
1
data_a2
Figure 3.11: Placing S-function in subsystem Area1 for real-time implementation.
2
3
4
56 7 8 9 10
11
Gen2 Gen4
Gen3
C1 C2
Load1 Load2
1Gen1
25km 10km 25km10km110km 110km
Figure 3.12: One-line diagram for Case Study 1.
and saved. The relative machine angles are shown in Figure 3.14 in which Gen4’s angle is
selected as the reference. The real-time results are superimposed on the results found from
PSS/E. As can be seen the IR method is completely stable during the steady-state of the
system, i.e. t < 5sec. During the transient state and also after the fault is cleared, the real-
time results closely follow the results from PSS/E. The maximum discrepancy between
real-time simulation and PSS/E was found to be 0.93%, based on (3.5):
εδ =max|δPSS/E − δIR|
δPSS/E. (3.5)
where δPSS/E and δIR were defined as the relative machine angles from PSS/E and IR
method respectively. It can be further observed from Figure 3.14 that following the fault,
59
G1
G2
Master Subsystem
G3
G4
Slave Subsystem
FP
GA
I/O
Card
In
fin
iBa
nd
Lin
k
Oscilloscope
Figure 3.13: Distribution of subsystems of Case Study 1 among cluster nodes of the real-time simulator.
the oscillations of Gen4 are closer to the oscillations of Gen3 rather than to those of Gen1 or
Gen2. If the reference generator is switched to Gen1 or Gen2 instead of Gen4, it was found
that the oscillations of Gen1 are closer to the oscillations of Gen2 rather than to those of
Gen3 or Gen4. This observation practically demonstrates the coherency relation existing
in this system.
To investigate the effect of the fault location and the partitioning scheme on the per-
formance of the IR method, the following scenario was simulated. Suppose that the fault
happens at Bus 5. Two different patterns of partitioning have been applied for this case.
The first is based on the coherency property of the system, i.e. {1, 2} and {3, 4}. The second
pattern is based on the fact that since G1 is the closest generator to the fault location it will
accelerate faster than other generators in the system; therefore, the system is divided into
two subsystems: {1} and {2, 3, 4}. These two patterns have been simulated in real-time
using the IR method, and then the results were compared with those of PSS/E. Results of
both patterns are close to those from PSS/E, but the maximum error in the second pattern
is larger than the maximum error when coherency-based partitioning was used. Several
other combinations of fault location and partitioning patterns have also been examined in
this system, and it was concluded that slow coherency partitioning based IR method are
the closest to the PSS/E’s results.
Table 3.1 shows the timing performance of Master and Slave nodes of the real-time
simulator running under the XHP execution mode during one time-step (1ms). This table
shows that the tasks of computation and communication are done in less than 60µs. These
60
0 5 10 155
10
15
20
25
30
35
40
45
Time (sec)
Rela
tiv
e m
ach
ine a
ng
les (
deg
rees)
1,4
2,4
3,4
Real-time
PSS/E
Figure 3.14: Comparison of relative machine angles collected from real-time simulator andPSS/E simulation for Case Study 1: δi,4 = δi − δ4; i = 1, 2, 3.
Table 3.1: Performance log for real-time simulation of Case Study 1Duration (µs)
concluded that larger subsystems can be implemented on each node, and that faster than
real-time simulation is also possible.
The accuracy of the IR method is analyzed by varying the time-step and calculating
the error in (4.24). The results are presented in Table 3.3. As expected when the time-
step increases the computation error increases as well. Nevertheless, it can be predicted
that with larger time-steps larger systems can be simulated on this hardware using the IR
method. It can however be seen that the maximum error depends not only on the time-
step but also on the size of the system. For instance, the time-step of 5ms results in the
maximum error of 1.32% and 3.29% in the 4 and 10 generator systems, respectively.
63
0 5 10 15-10
0
10
20
30
40
50
60
70
80
90
Time (sec)
Rela
tiv
e m
ach
ine a
ng
les (
deg
rees)
5,10
4,10
3,10
2,10
1,10
Real-time
PSS/E
Figure 3.17: Comparison of relative machine angles collected from real-time simulator andPSS/E simulation for Case Study 2: δi,10 = δi − δ10; i = 1 . . . 5.
Table 3.3: Relation between time-step and accuracy of the IR methodMaximum error εδ%
Time-Step (ms) Case study 1 Case study 21 0.93 1.512 1.04 1.705 1.32 3.29
10 1.88 4.2
3.6.3 Case Study 3: Large-Scale System
In the previous two case studies it was concluded that larger subsystems can be imple-
mented on each node of the real-time simulator. By performing several tests with various
sizes of power systems it was realized that each target node of the existing simulator can
be filled with 10 generators all modeled in detailed while still running in real-time with
a time-step of 4ms. As we have 8 target nodes available, the largest system that can be
modeled in real-time is an 80 generators system. This system was made by expanding
the IEEE test system. For this purpose, the IEEE 39 bus system was duplicated 8 times in
the PSS/E software environment, and then interconnected by transmission lines to build
a large-scale network. The result is a 312 bus and 80 generator power system. The steady-
state and dynamic stability of this system has been examined and verified in PSS/E. This
64
0 5 10 15
30
40
50
60
70
80
Time (sec)
Rela
tiv
e m
ach
ine a
ng
les (
deg
rees)
6,10
8,10
9,10
7,10
Real-time
PSS/E
Figure 3.18: Comparison of relative machine angles collected from real-time simulator andPSS/E simulation for Case Study 2: δi,10 = δi − δ10; i = 6 . . . 9.
system was partitioned and distributed in all 8 target nodes of the simulator running in
parallel and in XHP mode. Figure 3.19 illustrates the top lay-out of this system in the
SIMULINK environment prepared to be run on the real-time simulator. As explained in
the previous section one target node must be the master while others are slave nodes (i.e.
7 nodes in this case). The performance log of this simulation is shown in the Appendix
B for randomly selected five successive time steps. These results are directly reported by
MonitoringViewer feature of the RT-LAB software that shows in detailed the timing of
each operation in each target node during the simulation period. For each target node,
this report includes an item called Number of Overruns which counts the number of
time steps that for any reason the simulation could not satisfy the real-time requirements
and lasted more than the fixed time-step. In Appendix B the report includes the timing of
just two nodes: master (sm area1), and one of the slaves (ss area2). The report declares
that the number of overruns for all nodes is 0, which means the simulation was performed
successfully in real-time.
3.7 Summary
This chapter presented a parallel processing method known as instantaneous relaxation
(IR) for the real-time transient stability simulation of large-scale power systems. Although
65
it is possible to utilize real-time simulators based on the electromagnetic transient simula-
tion approach to perform transient stability analysis, the size and cost of the simulator is
usually prohibitive especially for simulating large-scale systems. The motivation behind
this work is to test the real-time feasibility of a fully parallel method that could alleviate
these limitations. The waveform relaxation (WR) method was investigated in this chap-
ter for implementation in real-time. However, it was found that WR method has some
restrictions for real-time simulation due to the following reasons:
• The WR method provides a set of values in the form of a complete waveform. How-
ever, real-time simulation especially hardware-in-the-loop simulation requires in-
stantaneous values of variables.
• Implementation of the WR causes uneven computation loads among the time-steps.
This results in execution time overrun in some time-steps and excessive idling time
in the others. An overrun, which describes a situation when the simulator requires a
larger time-step than the specified fixed time-step to finish its task, is not acceptable
in hard real-time systems.
These problems are overcome by the proposed IR method. It inherits all the advantages of
the WR method but is also efficient for real-time implementation. The two main differences
between the IR and WR methods are:
• In the IR method the instantaneous values of the variables are being used and not
their waveforms.
• To achieve the required accuracy several iterations of the Newton-Raphson within
each time-step are performed.
To demonstrate the performance of the IR method, three case studies have been im-
plemented on a PC-Cluster based real-time simulator and the results are validated by
the PSS/E software. Several comparisons verified the accuracy and efficiency of the IR
method. In addition, the performance of the slow coherency method as the partitioning
tool was analyzed, and it was concluded that for different fault locations in the system
results derived from this method had lower amounts of error.
66
Figure 3.19: Implementation of a large-scale power system for parallel real-time simulationusing the IR method.
67
Part II
Large-Scale Transient StabilitySimulation on GPU-based Hardware
68
4Single GPU Implementation: Data-Parallel
Techniques
4.1 Introduction
Part I of this thesis discussed the real-time simulation of transient stability. The Instan-
taneous Relaxation method was proposed and successfully implemented on the real-time
simulator. It was mentioned that since decades ago several approaches have been devel-
oped to perform transient stability simulation faster for large-scale systems on parallel
computing hardware [49]. We categorized these methods into two major groups: tearing
and relaxation [81]. The commonality of these methods is task-parallelism which executes
the component subsystems on parallel and distributed hardware composed of clusters of
CPUs. Nevertheless, there are two limitations in these methods that contribute to the speed
bottleneck: (1) data-sequential computation on the CPUs of the cluster, and (2) limited data
bandwidth, and latency of the inter-processor communication channels of the cluster.
Recently, the Graphics Processing Unit (GPU), as introduced in Chapter 2, has revealed
the potential to revolutionize state-of-the-art research in data-parallel computing. A data-
parallel application consists of large streams of data elements in the form of matrices and
vectors that have identical computation codes (kernels) applied to them. The data-parallel
characteristic of the GPU gives it a single-instruction-multiple-data (SIMD) architecture.
In Part II of this thesis, i.e. this chapter1 and the next one, we will discuss GPU-based
1Material from this chapter has been published: V. Jalili-Marandi, V. Dinavahi, “SIMD-based large-scaletransient stability simulation on the graphics processing unit,” IEEE Trans. on Power Systems, pp. 1-10, 2010.
69
transient stability simulation for large-scale power systems. The motivation for this work
is twofold: the mathematical complexity along with the large data-crunching need in this
simulation, and the substantial opportunity to exploit parallelism. Both these character-
istics are uniquely suited to the GPU. However, since the GPU’s architecture is markedly
different from that of a conventional CPU, it requires a completely different algorithmic
approach for implementation. The GPU thrives on applications that have a large compu-
tational requirement, and where data-parallelism can be exploited. Therefore any com-
putation that is desired to be implemented on the GPU must be in the SIMD format, oth-
erwise the GPU cannot deliver its computational benefits. Here we propose SIMD-based
programming models to exploit the GPU’s resources for transient stability simulation.
4.2 GPU Overview
As GPU and its applications are new topics in the Power and Energy Society (PES), before
going further into GPU’s application for transient stability simulation, it is important to
first become familiar with GPU’s architecture and programming paradigm.
4.2.1 GPU Evolution
The earliest ancestors of the dedicated graphics processors were originally designed to
accelerate the visualization tasks in the research labs and flight simulators. Later they
found their way to commercial workstations, personal computers, and entertainment con-
sols [82]. By the end of 2000s, the PC add-in graphics cards were developed as fixed-
function accelerators for graphical processing operations (such as geometry processing,
rasterization, fragment processing, and frame buffer processing). Around this time, the
term of “graphics processing unit” (GPU) arose to refer to this hardware used for graphics
acceleration [83].
In the early 2000’s the GPU was a fixed-function accelerator originally developed to
meet the needs for fast graphics in the video game and animation industries [82]. The
demand to render more realistic and stylized images in these applications increased with
time. The existing obstacle in the fixed-function GPU was the lack of generality to ex-
press complicated graphical operations such as shading and lighting that are imperative
for producing high quality visualizations. The answer to this problem was to replace the
fixed-function operations with user-specified functions. Developers, therefore, focused on
improving both the application programming interface (API) as well as the GPU hardware.
70
The result of this evolution is a powerful programmable processor with enormous arith-
metic capability which could be exploited not only for graphics applications but also for
general purpose computing (GPGPU). Taking advantage of the GPUs’ massively parallel
architecture, the GPGPU applications quickly mushroomed to include intensive computa-
tions such as those in molecular biology, image and video processing, n-body simulations,
large-scale database management, and financial services [83].
The especial architecture of the GPU, explained in this section, made it a successful ac-
celerator/processor in particular applications in which a large amount of computations is
required to be performed on a data-parallel structure of input elements, the same as graph-
ics applications. A data-parallel application consists of large streams of data elements in
the form of matrices and vectors that identical computation codes (kernels) are applied
to them. Moreover, the data communication required to compute the output streams is
small. Through the GPUs evolution, as their main duty was for different application de-
mands than the CPU, the architecture of the GPU has progressed in a different direction
than that of the CPU. A life-like rendering of images requires billions of pixels per second
and each pixel requires hundreds or more operations. Therefore, the fundamental design
of the GPU is in such a way to deliver an enormous amount of computations for its best
efficiency in a massive data-parallel application. Later it will be observed that the size of
computation is a key-point to achieve maximum efficiency in a GPGPU application.
4.2.2 GPU Hardware Architecture
To efficiently use and program a GPU it is instructive to learn the GPU’s internal architec-
ture. In this work we have used NVIDIA’s GeForce GTX 200 series. The following section
briefly explains the architecture and hardware specifications that we require for program-
ming purposes.
Figure 4.1 illustrates the architecture of the GPU [84] plugged into the motherboard of
a 2.5GHz quad-core AMD Phenom CPU supported by 4GB of RAM. The GPU accesses
the main memory of the system, i.e. RAM, via the PCIe 2.0 bus (Peripheral Component
Interconnect Express). This version of GPU has 16 links in its PCIe interface that each link
has a bandwidth capability f 0.5GB/s in each direction simultaneously. Thus, the PCIe 2.0
bus shown in Figure 4.1 supports up to 8GB/s transfer rate. This rate between the CPU
and RAM is typically in the 12GB/s range. The GPU runs its own specified instructions
independently but it is controlled by the CPU. The computing element in the GPU is called
a thread. When a GPU instruction is invoked, blocks of threads (with the maximum size of
71
Figure 4.1: Hardware architecture of GPU mounted on the PC motherboard.
512 threads per block) are defined to assign one thread to each data element. All threads
in one block run the same instruction on one streaming multiprocessor (SM).
Each SM includes 8 stream processor (SP) cores, an instruction unit, and on-chip mem-
ory that comes in three types: registers, shared memory, and cache. Threads in each block
have access to the shared memory in the SM, as well as to a global memory in the GPU.
Unlike a CPU, the architecture of the GPU is developed in such a way that more transis-
tors are devoted to data processing rather than data caching and flow control. When a
SM is assigned to execute one or more thread blocks, the instruction unit splits and cre-
ates groups of parallel threads called warps. The threads in one warp are managed and
processed concurrently on the eight stream processors.
The target GPU specifications in this study are given in Tables 4.1. Threads are assigned
by the thread scheduler which talks directly to each SM through a dedicated instruction
unit which in turn assigns the tasks to the eight stream processors. Depending on the GPU
model, 2 or 3 SM’s can be clustered to build a thread processing cluster (TPC). Moreover
two special function units (SFUs) have been included in each SM to execute transcenden-
tal calculations (e.g. sin, cosine), attribute interpolation and for executing floating point
instructions. Figure 4.2 illustrates these units schematically.
72
Table 4.1: GeForce GTX 280 GPU specifications
Number of SM’s 30Number of SP’s 240Device memory 1GBClock rate 1.3GHzWarp size 32 threadsActive warps/SM 32Bandwidth:Host-to-Device 1.35GB/sDevice-to-Host 1.62GB/sDevice-to-Device 114.00GB/s
4.2.3 GPU Programming
After becoming familiar with the GPU’s architecture, in this section the GPU programming
models are reviewed to understand the GPU’s computational resources. Depending on the
application, the GPU programming paradigms can be divided into two main categories:
graphics related programming, and GPGPU programming. In both these categories the
GPU follows the SIMD model.
Graphical functionality
From the graphics point of view the GPU has two types of programmable processors: ver-
tex and fragment processors [85]. Vertex processors process streams of vertices (made up
of positions, colors, and other attributes) which are the elements that build a polygonal
geometric model. In computer graphics 3D objects are typically represented with trian-
gular meshes. The vertex processors apply a vertex program (also called a vertex shader)
to transform each vertex based on its position relative to the camera, and then each set of
three vertices is used to compute a triangle from which streams of fragments are gener-
ated. A fragment contains all information, such as color and depth, needed to generate a
shaded pixel in the final image. The fragment processors apply a fragment program (also
called a pixel shader) to each fragment in the stream to compute the final color of each
pixel. This functionality of GPUs is out of the scope of this research and we do not refer to
that anymore.
73
SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
TPC SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
TPC SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
TPC SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
TPC SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
TPC
Thread Scheduler
SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
TPC SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
TPC SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
TPC SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
TPC SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
SM
SP SP
Cache
SP SP
SP SP
SP SP
SFU SFU
Memory
TPC
Figure 4.2: The GTX 280 hardware architecture: it consists of 10 TPCs, 3 SMs per TPC,and a total of 240 SPs; TPC: thread processing cluster, SM: streaming multiprocessor, SP:stream processor.
General purpose functionality
Early GPGPU programming directly used the existing graphics API’s to express computa-
tions in terms of an image. In other words, the computational elements (i.e. vectors and
matrices) were mapped onto the graphical elements (i.e. vertices or pixels) which are the
components of shading programs. Shading languages used for this purpose include Cg,
HLSL, and OpenGL. Although this technique has been successfully used in many research
areas, including power system load flow computations [86], it was largely unapproachable
by the common programmer. Firstly, because there is a mismatch between traditional pro-
gramming and the graphics API’s, and secondly, because it is difficult to debug or modify
these programs.
High level programming languages
Along with the evolution of the programmable GPU’s hardware architecture, the devel-
opers designed higher level languages that were specifically for general computation pur-
poses. Dedicated GPU programming tools that bypassed the graphics functions of the
GPU were created for general purpose computing, starting with Brook and Sh, and ulti-
mately leading to commercial tools such as AMD’s HAL and NVIDIA’s CUDA.
CUDA (Compute Unified Device Architecture) provides a C-like syntax to execute and
manage computations on the GPU as a data-parallel computing device. A CUDA program
consists of multiple phases that are executed on either the CPU (host) or the GPU (device).
74
The phases of the program that exhibit little or no data-parallelism are run in the host-
code after compiling with the host’s standard C compiler, whereas the phases that exhibit
fine-grained parallelism are implemented in the device-code in the form of kernels, the syn-
onym for GPU functions. Host-code uses a CUDA-specific function-call syntax to invoke
the kernel code. Calling a kernel distributes the tasks among the available multiprocessors
to be simultaneously run on a large number of parallel threads. The programmer orga-
nizes these threads into a grid of thread blocks. Thread creation, scheduling, and resource
management are performed in hardware. Each thread of a CUDA program is mapped to a
physical thread resident in the GPU, and each running thread block is physically resident
on a SM.
Moreover, a library of the basic linear algebra subprograms (BLAS) is provided that
allows the integration with C++ code. By using this library, called CUBLAS, portions of a
sequential C++ program can be executed in SIMD-form on the GPU, as shown in Figure
4.3, while other parts of the code are executed sequentially on the CPU [87]. Wherever a
kernel is invoked a grid consisting of several blocks with equal numbers of threads/block
is created. Each block within a grid, and each thread within a block are identified by in-
dividual indices that make them accessible via the built-in variables in CUDA. Threads
determine the task they must do and the data they will access by inspecting their own
thread and block IDs. Therefore in an application with highly intensive computations,
the onerous computation tasks can be offloaded to the GPU, and performed faster in par-
allel, whereas mundane tasks such as the flow control of the program, required initial
calculations, or the updating and saving of the variables can be done by the CPU. This
co-processing configures a hybrid GPU-CPU simulator.
4.3 Data-Parallel Computing
Here the fundamental difference in the computing model of a GPU and a CPU is discussed,
which leads us to a new methodology to implement the transient stability simulation on
the data-parallel architecture of GPU. From the programmer’s perspective a GPU is a par-
allel machine, whereas the CPU is a serial machine. A CPU executes one instruction after
the another, and each instruction does one thing, for instance, adding the contents of two
memory locations. A GPU, on the other hand, can add many pairs of numbers at the same
time.
Let us look at a simple example. Suppose we want to evaluate z = x + y, where x, y,
75
CUDA Program
C/C++ Code
CUDA kernels
or
CUBLAS functions
C/C++ Code
CUDA kernels
or
CUBLAS functions
Seq
uen
tiali
ty i
n t
he p
rogram
Host (CPU)
Runs sequentially
Host (CPU)
Runs sequentially
Device (GPU)
Grid 0
Runs in parallel
Device (GPU)
Grid 1
Runs in parallel
Grid 0 (i blocks, n threads/block)
block 0
thread
0
thread
1
thread
n
block 1
thread
0
thread
1
thread
n
block i
thread
0
thread
1
thread
n
Grid 1 (j blocks, m threads/block)
block 0
thread
0
thread
1
thread
m
block 1
thread
0
thread
1
thread
m
block j
thread
0
thread
1
thread
m
Figure 4.3: Cooperation of the host and device to execute a CUDA program, and the hier-archy of computing structure in a GPU.
and z are n× 1 real vectors. On the CPU, a single for loop is typically used over all array
elements as follows:
for(i = 0; i < n; i + +)
z[i] ← x[i] + y[i]
In this model two levels of computation are active: outside the loop, the loop counter i
is increasing and compared with the length of vectors n, whereas inside the loop, the arrays
are accessed at a fixed position determined by the loop counter and the actual computation
is performed (addition on each data element). The calculations performed on each data
element in the vectors are independent of each other, i.e., for a given output position,
distinct input memory locations are accessed and there are no data dependencies between
elements in the result vector.
If we had a vector processor capable of performing operations on whole vectors of
length n or even n CPUs, we would not need the for loop at all. This is the core idea
of SIMD programming. The computation on the GPU is performed by separating the
outer loop from the inner calculations. The inner loop calculations are extracted into a
computational kernel as follows:
if(index < n)
z[index] ← x[index] + y[index]
where index is the ID of the threads assigned to elements of the vectors. Note that the
kernel is no longer a vector expression but a scalar template of the underlying math that
76
forms a single output value from a set of input values. For a single output element, there
are no data dependencies with other output elements, and all dependencies to input ele-
ments can be described relatively. Whenever a kernel is called, the driver logic hardware
schedules each data item into the different multiprocessors (SM)–this is not programmable.
Although internally the computation is split up among the available SMs, one cannot con-
trol the order in which they are working. One can therefore assume that all work is done
in parallel without any data interdependence.
Here is a simple example to show how a CUDA-based SIMD kernel looks like. Suppose
we want to model a limiter to control the maximum and minimum amounts of a signal as
shown in Figure 4.4. In the transient stability simulation of power systems these limiters
are widely used in the model of excitation and PSS devices for synchronous generators,
and depending on specifications of each machine the up and down limits are different.
Suppose the output signals of the transfer function that we want to pass them through the
limiter are saved in a vector, V2. We also need two vectors whose elements are the maxi-
mum and minimum limits of the signals at each individual machine, i.e. vmax and vmin.
The implementation of this model by using the function concepts in C++ running sequen-
tially on the CPU is as follows:
void
limiterFunc(float* V in, float* V max, float* V min,const int numElems)
{for (int i=0; i < numElems; i++)
{if (V in[i] >= V max[i])
V in[i] = V max[i];
else if (V in[i] < V min[i])
V in[i] = V min[i];
}}
where in this code V in is the vector of input signals, i.e. V2 in Figure 4.4, V max and
V min are the maximum and minimum limits of each limiter, and numElems is the length
of the input signal. The porting of this function in CUDA language running in SIMD
format on the GPU is a kernel as below:
77
maxv
minv
Transfer
Function 3V1V 2V
Figure 4.4: An schematic model for a limiter.
global void
limiterKernel(float* DEVICE1, float* DEVICE2, float* DEVICE3,const int numElems)
{int idx = threadIdx.x + blockDim.x * blockIdx.x;
if (idx < numElems)
{if (DEVICE1[idx] >= DEVICE2[idx])
DEVICE1[idx] = DEVICE2[idx];
else if (DEVICE1[idx] < DEVICE3[idx])
DEVICE1[idx] = DEVICE3[idx];
}}
In this kernel the global qualifier in the first line declares a function as being a ker-
nel. Such a function is callable from the CPU and is executed on GPU. The up and down
limits for each limiter are saved and transferred to the GPU in two vectors: DEVICE2
and DEVICE3. The values of input signal, which also has been transferred to GPU, i.e.
DEVICE1, is compared with these limits to meet the required conditions. We can see in
this kernel there is not any for loop, and instead of that a new parameter, called idx, is
defined to control the execution of the kernel. To invoke this kernel from a CPU-based
The two matrices contain the off-diagonal elements of GR and BR:
Gmoff−diag = GR − diag(Gv) (4.14)
Bmoff−diag = BR − diag(Bv). (4.15)
Note that vectors Gv and Bv, and matrices Gmoff−diag and Bm
off−diag can be built and
saved off-line for any number of contingencies and transferred to the GPU during the
initialization step. Once all of the above vectors and matrices are allocated on the GPU,
the SIMD computation for S1 to S4 can be expressed as follows:
Sv1 = (Um
1 ·Gmoff−diag − Um
3 ·Bmoff−diag) · Iv
D (4.16)
Sv2 = (Um
2 ·GR − Um4 ·BR) · Iv
Q (4.17)
Sv3 = (Um
3 ·GR − Um1 ·BR) · Iv
D (4.18)
81
Sv4 = (Um
4 ·Gmoff−diag + Um
2 ·Bmoff−diag) · Iv
Q. (4.19)
The SIMD computations of A5 to A8 is given as:
Av5 = Iv + Bv ∗ Uv
3 −Gv ∗ Uv1 (4.20)
Av6 = Iv −Gv ∗ Uv
4 −Bv ∗ Uv2 (4.21)
Av7 = GR · Uv
5 −BR · Uv6 (4.22)
Av8 = GR · Uv
6 + BR · Uv5 (4.23)
where Iv = [1, 1, ..., 1]tn×1, and the star operation ‘∗’ refers to a kernel that multiplies
two equal-length vectors element by element. Based on (4.16) to (4.23) the SIMD format of
equations ID and IQ, and then ED and EQ is achieved.
4.5 GPU-Based Programming Models
The GPU thrives on applications that have a large computational requirement, and where
data-parallelism can be exploited. A data-parallel application consists of large streams of
data elements in the form of matrices and vectors that have identical computation codes
(kernels) applied to them. The data-parallel characteristic of the GPU gives it a single-
instruction-multiple-data (SIMD) architecture. Therefore any computation that is desired
to be implemented on the GPU must be in the SIMD format, otherwise the GPU cannot de-
liver its computational benefits. Here we propose two SIMD-based programming models
to exploit the GPUs resources for transient stability simulation. In the first model the GPU
is used as a co-processor for the CPU to offload certain computational tasks (hybrid GPU-
CPU simulation), whereas in the second model the GPU works as a stand-alone processor
and the CPU only controls the flow of the simulation (GPU-only simulation).
4.5.1 Hybrid GPU-CPU Simulation
The standard method of transient stability explained in the previous section was imple-
mented in a hybrid GPU-CPU configuration. Benchmarking revealed that a majority of
82
execution time in the simulation was spent for Step 2 and Step 3, i.e. the nonlinear itera-
tive solution using Newton-Raphson, and the linear algebraic equation solution. Therefore
these two steps of the simulation were off-loaded to the GPU to be processed in parallel,
while the remaining tasks such as discretizing, updating, and computation of intermediate
variables were executed sequentially on the CPU. The entire simulation code was devel-
oped in C++ integrated with CUDA.
In this programming model discretization of the differential equations, and building
of the Jacobian matrix are done on the CPU, whereas the network algebraic equations and
the Jacobian matrix solutions are performed on the GPU. At each time-step, the Jacobian
matrix is transferred to the GPU. It should be noted that CUDA stores matrices on the GPU
in a column-major format. Therefore after the Jacobian matrix is constructed on CPU, it
needs to be transposed before or after being transferred to the GPU. The other option is to
construct the Jacobian matrix in the column-major format from the beginning on the CPU
obviating the need for an extra transpose operation and thus saving computation time.
Here the latter option has been adopted in this programming model.
With the Jacobian matrix in the proper format on the GPU, the SIMD-format of the LU
factorization method was used on the GPU to handle large matrix decomposition.This fac-
torization scheme was implemented using a blocked algorithm, employing bulk matrices,
specifically suited for data-parallelism [88]. After transforming the Jacobian matrix into
its upper and lower triangular matrices, the BLAS2 function cublasStrsv() of the CUBLAS
library is used to solve the equation L · U ·∆x = −F(xj−1) for ∆x. The results are trans-
ferred back to the CPU to update the state variables for the next iteration’s calculations.
Then the computations are continued on the GPU for the network side solution as de-
scribed by (4.10) to (4.23). Once the iteration process converges, the time-step is advanced.
These steps are illustrated in the flowchart given in Figure 4.5.
4.5.2 GPU-Only Simulation
In the second programming model the transient stability simulation was carried out as a
GPU-only computation. In this model the CPU initializes the GPU with the system data,
and then all the 3 steps of the simulation are done on the GPU, while the CPU monitors
and controls the flow of the simulation. In this programming model the Jacobian matrix is
completely constructed on the GPU. Constructing the Jacobian matrix for a multi-machine
power system is well suited for exploiting data-parallel programming. For example, in
the row-major-saved Jacobian matrix, the first column is the derivative of all non-linear
83
Start
Data read and
initialization
t = 0
Discretization of differential
equations (4) and compute
Jacobian
Transfer of J and F in (5)
to the GPU
LU factorization for J
Solve L.U. x=-F for xUpdate algebraic
variables on the CPU
Solve network equations
on the GPU
Converge?NO
YES
t = t + h
t < TYES
Stop
NO
Transfer algebraic
variables to the CPU
Transfer x to the CPU
and update x
Figure 4.5: Flowchart for the hybrid GPU-CPU transient stability simulation. The coloredboxes refer to the GPU operations, and white boxes refer to the CPU operations.
functions with respect to one of the variables. Although these functions have different
formulations, they re-occur for all generators in the system. Therefore the derivatives of
all identical functions (that have the same formulation but different data-input) can be
evaluated in a data-parallel model. After the sub-matrices of the Jacobian are calculated
they are combined together to form the full Jacobian matrix on the GPU, and the simulation
continues the same as hybrid GPU-CPU model.At the end of simulation, the value of the
required variables is transferred to the CPU memory to be saved or plotted. The flowchart
in Figure 4.6 illustrates this process. The C++ source code for this model has been shown
in Appendix C.
84
Start
Data read and
initialization
t = 0
Discretization of differential
equations (4) and compute
Jacobian
LU factorization for J
Solve L.U. x=-F for xUpdate algebraic
variables on the GPU
Solve network equations
on the GPU
Converge?NO
YES
t = t + h
t < TYES
Stop
NO
Figure 4.6: Flowchart for the GPU-only transient stability simulation. The colored boxesrefer to the GPU operations, and white boxes refer to the CPU operations.
4.6 Experimental Results
In this section we demonstrate results to verify the accuracy and efficiency of the SIMD-
based programming models described in the previous section for the transient stability
simulation of large-scale power systems on the GPU. As mentioned before, the target GPU
in this work is connected to the motherboard of a quad-core CPU. Although the CPU has 4
cores, to precisely control the execution of the CPU and to have a clear comparison, thread
programming was used to force the CPU to run the C++ code on only one of the 4 cores.
Otherwise, the operating system decides each core’s execution at each instant which leads
to a vague evaluation. We selected Windows XP-64 as the host’s operating system. There
were three reasons for choosing this platform: first, we needed a 64-bit operating system,
in order to utilize 8GB of RAM. Second, we expected fewer driver issues on Windows
compared to Linux. Third, within the Windows product line, Windows Vista was not
supported by the NVIDIA GPU Computing platform, leaving Windows XP as the only
choice. For development, we used Microsoft Visual Studio 2005.
85
4.6.1 Simulation Accuracy Evaluation
The accuracy of the programming models was validated using PTI’s PSS/E software pro-
gram. The case study used in this section is the IEEE 39 bus New England test system
whose one-line diagram was shown in Figure 3.15 in Chapter 3. The system data in the
PSS/E format is also given in Appendix E. The complete system can be described by 90
non-linear differential equations and 20 algebraic equations. Several fault locations have
been tested and the results were compared with those of PSS/E. In all cases results from
the proposed programming models match the PSS/E results very well. A sampling of
these results obtained from the hybrid GPU-CPU simulation is presented here. A three-
phase fault happens at Bus 21, at t=1s and it is cleared after 100ms. Gen10 is the reference
generator and the relative machine angles are shown in Figure 4.7 and Figure 4.8. For com-
parison PSS/E results are superimposed in these two figures. As can be seen the transient
stability code is completely stable during the steady-state of the system, i.e. t<1s. During
the transient state and also after the fault is cleared, the program results closely follow the
results from PSS/E. The maximum discrepancy between generator angles from GPU-CPU
co-processing and the PSS/E simulation was found to be 1.46%, based on (4.24):
εδ =max|δPSS/E − δGPU−CPU |
δPSS/E(4.24)
where δPSS/E and δGPU−CPU are the relative machine angles from PSS/E and GPU-
CPU co-processing simulation, respectively.
4.6.2 Computational Efficiency Evaluation
To investigate the efficiency of the proposed SIMD-based programming models for the
transient stability simulation, we show comparative results in this section. Several test
systems of increasing sizes have been used for this evaluation whose specifications are
listed in Table 4.2. The Scale 1 system is the IEEE’s New England test system, illustrated in
Figure 3.15 and verified in the previous section. The Scale 1 system was duplicated several
times to create systems of larger scales. Thus, we obtained test systems of 78, 156, 312, 624,
and 1248 buses. In these systems a flat start was used, i.e. voltage and angle of all buses set
to 1.0∠0◦p.u., and they were modeled in the PSS/E software to find the load flow results.
These results were then fed into the prepared simulation codes.
Three separate simulation codes were prepared: the first code is purely in C++ to be
run sequentially on the CPU (CPU-only), the second is C++ integrated with CUDA to be
86
0 5 10 15-10
0
10
20
30
40
50
60
70
80
90
Time (sec)
Rela
tiv
e m
ach
ine a
ng
les (
deg
rees)
5,10
4,10
3,10
2,10
1,10
GPU-CPU
PSS/E
Figure 4.7: Comparison of relative machine angles collected from hybrid simulator andPSS/E simulation for IEEE 39 bus test system: δi,10 = δi − δ10; i = 1 . . . 5, for a three-phasefault at Bus 21.
0 5 10 15
30
40
50
60
70
80
Time (sec)
Rela
tiv
e m
ach
ine a
ng
les (
deg
rees)
6,10
8,10
9,10
7,10
GPU-CPU
PSS/E
Figure 4.8: Comparison of relative machine angles collected from hybrid simulator andPSS/E simulation for IEEE 39 bus test system: δi,10 = δi − δ10; i = 6 . . . 9, for a three-phasefault at Bus 21.
completely run on the GPU (GPU-only), and the third is also the integration of C++ and
CUDA, however, it uses GPU as the coprocessor (GPU-CPU). The difference between the
second and third programming models was explained in Section III. The execution time of
these three codes was compared for the test systems. In Table 4.2 the columns indicated
by CPU-only, GPU-only, and GPU-CPU list the computation time of each programming
model to simulate a duration of 1580ms with a time-step of 10ms for all systems. The CPU
87
Table 4.2: System scale versus computation time for various configurations for a simulationduration of 1580ms
factors that contribute to PSS/E’s speed are as follows:
1. PSS/E uses the Modified Euler integration algorithm which is an explicit integra-
tion technique (Chapter 26 in [89]). This is a simple and fast method, however, it
can suffer from numerical instability. For a given system configuration, depending
on the time-step value the simulation may either converge or diverge. If it did not
converge, the time-step must be decreased and program must be rerun [90]. In the
proposed GPU-based simulation, the Trapezoidal Rule, an implicit integration algo-
rithm, was used because it is more accurate and avoids numerical instability. How-
ever this method requires an iterative solution of the resulting nonlinear algebraic
equations at each time-step.
2. The outputs of an explicit integrator are not instantaneous functions of their inputs,
and a straightforward non-iterative procedure would be enough to find the deriva-
tives of states, as it happens in PSS/E. However the proposed GPU-based simulator
90
uses the Newton-Raphson method which consumes a large portion of the simulation
time, albeit it gives accurate convergence. At each time-step the Jacobian matrix is
calculated, LU factorized, and then solved using forward-backward substitutions.
3. PSS/E takes advantage of the sparsity of the system matrices. This is an important
factor in its fast and successful management of computer storage. However it should
be noted that presenting PSS/E with a power system network model, whose origi-
nal admittance matrix has a number of nonzero elements that exceed the program’s
allocated capacity, results in an error condition that prevents the use of some, but
not all, of the available iteration algorithms (Chapter 5 in [89]). The purpose in this
chapter was to show how the same implementation of a transient stability algorithm
on a GPU is advantageous with respect to a CPU implementation. Therefore sparsity
was not used in any of the proposed programming models.
4.8 Summary
Transient stability simulation of large-scale power systems is computationally very de-
manding. This chapter investigated the potential of using a GPU to accelerate this sim-
ulation by exploiting its SIMD architecture. Two SIMD-based programming models to
implement the standard method of the transient stability simulation were proposed and
implemented on a single GPU. The simulation codes are quite flexible and extensible; they
are written entirely in C++ integrated with GPU-specific functions. The accuracy of the
proposed methods were validated by the PSS/E software. The efficiency was evaluated
for several large test cases. Based on the results obtained, it can be concluded that:
• Using a GPU for transient stability simulations is highly advantageous when the sys-
tem size is large. As such, for simulating realistic-size power systems the application
of GPU looks promising.
• For small-scale systems the hybrid GPU-CPU simulation was faster than the GPU-
only simulation, while for large-scale systems the GPU-only model was faster.
91
5Multi-GPU Implementation of Large-Scale
Transient Stability Simulation
5.1 Introduction
In Chapter 4 the GPU hardware architecture, based on a NVIDIA GPU, and the SIMD
programming models were explained in detail. The transient stability simulation was im-
plemented on a single GPU, and the results revealed the excellent capabilities of including
GPU as a powerful processor in the power system simulations. However, similar to a
CPU, a GPU also has some computing capacity limitations, that restrict the maximum size
of the problem which can be implemented on it. Simulations of realistic power system of-
ten involve large problem size with onerous calculations. Therefore, this chapter explores
the use of multiple GPUs working in parallel and parallel processing based techniques for
solving large-scale systems.
The chapter1 begins with a review of the multi-GPU simulation application, and con-
tinues by describing the details of the computing system architecture that has been utilized
in this research. Managing multiple GPUs working in parallel to perform a simulation re-
quires specific programming skills which will be highlighted in this chapter. Two parallel
processing based techniques (tearing and relaxation) are implemented on multiple GPUs,
and a comparison between the two methods is presented. The chapter is concluded by
experimental results and discussions.
1Material from this chapter has been submitted: V. Jalili-Marandi, V. Dinavahi, “Multiple GPU implemen-tation for large-scale transient stability simulation,” IEEE Trans. on Power Systems, pp. 1-9, 2010.
92
5.2 Multi-GPU Overview
5.2.1 Applications
The obvious reason for utilizing multiple GPUs for general purpose computing is to achieve
a higher simulation speed, as is the goal in this research. However, compared to the host
main memory, GPU has limited device memory. For applications which require a lot of
storage, device memory limitations can be a major bottleneck for GPU. For this reason,
sometimes running algorithms on multiple GPUs is not only required for faster applica-
tions but also necessary to overcome memory bottlenecks.
There are two possible hardware configurations to use multiple GPUs for the comput-
ing purpose. The first is to mount multiple individual GPUs internally to the motherboard
of the host2 normally using the PCIe buses [92]. The use of multiple GPUs as CUDA de-
vices working on an application is only guaranteed to work if these GPUs are of the same
type [40]. It is important to note that in addition to the GPUs such as GTX 280, described
in Chapter 4, that are applicable to both the graphical tasks as well as general purpose
computing, there are GPU-architecture-based cards which are specifically designed for the
high performance computation with single and double precision floating point (e.g. Tesla
C1060). The Tesla series, introduced by NVIDIA in 2007, is the first GPU generation that
are fully dedicated to general purpose computing.
The second hardware configuration is to use an external computing unit equipped with
multiple GPUs. In this case all the GPUs are compute-specific. For instance the NVIDIA
Tesla S1070 (server version) integrates four Tesla T10 GPUs. This multi-GPU configuration
is used in this research.
5.2.2 Computing System Architecture
The computing system used in this research is one unit of Tesla S1070 manufactured by
NVIDIA [91]. The “Tesla” series of cards are compute-only devices without video output
connectors. The Tesla S1070 is equipped with four independent T10 processors (GPU), and
the programmer decides how many GPUs must be employed in a simulation and the tasks
each GPU must perform. Each of the T10 GPUs is integrated with 4.0GB of memory so that
the total memory of the S1070 unit is 16GB. Delivering a theoretical peak performance of 4
teraflops has made Tesla S1070 an energy efficient teraflop processor. Table 5.1 summarizes
2A comprehensive and practical work is the FASTRA done at the University of Antwerp, Belgium.http://fastra.ua.ac.be
93
Table 5.1: Tesla T10 Processor specifications
Number of SM’s 30Number of SP’s 240Device memory 4GBClock rate 1.3GHzWarp size 32 threadsActive warps/SM 32
the important specifications of a T10 processor. For more hardware architecture informa-
tion of Tesla S1070 the manufacturer data sheets are attached in Appendix D. Each of the
T10 GPUs includes 240 stream processors; thus the Tesla S1070 has a total of 960 stream
processors which can execute thousands of concurrent threads. Therefore, this comput-
ing system that mixes the multi-core CPUs any multiple GPUs provides a heterogenous
computing environment with the optimized performance.
Figure 5.1 illustrates the Tesla S1070 from front and top views. The inside architecture
of Tesla S1070 is shown in Figure 5.2. As depicted in this figure, each pair of the GPUs
are connected to one input/ouput NVIDIA Switch. On the host side, i.e. on the PC moth-
erboard, a Host Interface Card (shown in Figure 5.3) must be plugged into the PCIe bus.
Then by using the NVIDIA PCIe cable connected between the NVIDIA Switch and Host
Interface Card the link between one pair of GPUs of Tesla S1070 and PC host is estab-
lished. To connect the other pair of GPUs, the host computer must have an extra PCIe
slot mounted with another Host Interface Card. Otherwise, to have concurrent access to
4 GPUs two hosts must be used so that each pair of GPUs connects to one host. Figure
5.4 shows the possible configurations to connect a unit of Tesla S1070 to host computers.
The configuration used in this thesis is the same as in Figure 5.4(a) The maximum transfer
bandwidth between the host system and the Tesla processors is 12.8 GB/s.
With all of the highly advanced technology used in Tesla S1070, however, the direct
intercommunication capability of the 4 GPUs (such as using shared memory) is a missed
but promised feature. This means that Tesla S1070 cannot behave as a unified processor.
Therefore, to circulate data among the 4 GPUs of the Tesla S1070, data on one GPU is
first transferred to the host’s main memory (i.e. RAM), and then it is uploaded to the
other GPUs. By using the CPU threads, explained in the next section, this deficiency can
be recovered, but it should be noted that manipulating intensive computation requires
distributing it among existing GPUs.
94
Figure 5.1: Front and top views of Tesla S1070 [91].
5.2.3 Multi-GPU programming
The Tesla S1070 is a CUDA-enabled device. Therefore, all the CUDA programming func-
tionalities explained for the GTX 280 in Chapter 4 are also valid for the Tesla S1070. It was
previously mentioned that the GPU runs its own specified kernel independently but is con-
trolled by the CPU. A single GPU can execute only one kernel at any given time; whereas
a multi-GPU server such as the Tesla S1070 can run multiple kernels (4) simultaneously.
In this chapter we refer to these paradigms serial kernel and parallel kernel executions, re-
spectively Figure 5.5. Thus to have four GPUs working in parallel, in a Tesla S1070 or any
multi-GPU architecture, we require the same number of CPU cores to manage and control
the GPUs simultaneously. This minimizes the overhead that occurs in data copying and
kernel invocation.
Microsoft Visual C++ provides support for creating multi-thread applications with
95
Figure 5.2: Inside architecture of the Tesla S1070 computing system [91].
Figure 5.3: Host Interface Card installing in the host side [91].
Windows XP. There are two ways to program with multiple threads: use the Microsoft
Foundation Class (MFC) library or the C run-time library and the Win32 API [93]. There
also exist some packages and libraries, such as Boost C++ Libraries [94], that can be installed
and utilized for the CPU multi thread programming. In this work, the C-run-time library
was used to have a full control on the synchronization of GPU data-transfer. Writing and
debugging a multi threaded program is inherently a complicated and tricky undertaking,
because the programmer must ensure that objects are not accessed by more than one CPU
thread at a time. Synchronizing the resource access between CPU threads is a common
problem when writing CPU multi threaded applications [93]. Having two or more CPU
threads simultaneously access the same data can lead to undesirable and unpredictable
results. For example, one CPU thread could be updating the contents of a structure while
96
PC Motherboard
with 2 PCIe busesPCIe HIC
PCIe HIC
Tesla S1070 NVIDIA
Switch
NVIDIA
Switch
PC Motherboard
with 1 PCIe bus PCIe HIC
Tesla S1070 NVIDIA
Switch
NVIDIA
Switch
PC Motherboard
with 1 PCIe bus PCIe HIC
(a)
(b)
Figure 5.4: Possible configurations of connecting Tesla S1070 to host CPU system: (a) usingone host, (b) using two hosts.
another CPU thread is reading the contents of the same structure. It is unknown what data
the reading thread will receive: the old data, the newly written data, or possibly a mixture
of both. To control synchronization among the CPU threads, events are used. Events allow
CPU threads to be synchronized by forcing them to pause until a specific event be set or
reset.
Figure 5.6 illustrates how the application of multi thread programming is managed to
operate up to 4 GPUs connected to a quad-core CPU. The main thread on the CPU first
creates four child threads which are responsible for handling one GPU each. Creating
the CPU threads is a time-consuming operation; thus once they are created they should
be used for the whole of the simulation time duration. The main thread also creates two
event arrays called Start and End. Each element of these arrays is used as a notification
signal between the main thread and one of the child threads to determine the initiation or
97
kernel 1
kernel 2
kernel N
time
t=0
t=T
Tesla S1070
GTX 280
kernel 1
kernel 2
kernel N
Tesla T10
kernel 1
kernel 2
kernel N
Tesla T10
kernel 1
kernel 2
kernel N
Tesla T10
kernel 1
kernel 2
kernel N
Tesla T10
(a) (b)
Figure 5.5: (a) Serial kernel execution on a single GPU, (b) Parallel kernel execution on amulti-GPU system.
termination of a specific action. Child threads begin execution by setting one individual
device (GPU) and initializing it, and then wait until the Start event is set. As soon as
the main thread sets the Start event the computations in the individual GPU belonging
to each child thread are activated. The main thread goes into a waiting state until all the
threads are done by the GPU computations and the End event is set. Thereafter, four child
threads will exchange and update the required data with the help of the CPU, and the
simulation continues. At each child thread when the GPU computation is done, in addition
to setting the End event, it is also required to reset the Start event to prevent running of
the child threads until the data update is done by the main thread and the Start command
is released. Therefore, by appropriate use of the Start and End events the synchronization
between child threads and consequently the multiple GPUs is orchestrated.
5.3 Implementation of Parallel Transient Stability Methods onTesla S1070
In Chapter 2 two categories of the parallel processing based techniques, i.e. tearing and re-
laxation methods, were explained. In this section one method belonging to each category
is selected to be implemented on the parallel architecture of Tesla S1070. From the cate-
98
NO
(wait)
main( )
create threads
and events
set Start events
are all End
events set?
Yes
data exchange
reset all events
NO
(wait)
update events status
update events status
CPU thread #1
CPU thread #4
set device, and
initialize GPU#1
is Start event set?
computations on
GPU#1
reset Start event;
set End event
Yes
set device, and
initialize GPU#4
is Start event set?
computations on
GPU#4
reset Startevent;
set End event
Yes
NO
(wait)
Figure 5.6: The programming application for general purpose multi-GPU computationusing a quad-core CPU.
gory of tearing methods, the Block Incomplete LU decomposition method, and from the
relaxation group the Instantaneous Relaxation method, described in Chapter 3, are being
examined.
5.3.1 Tearing Methods on Multi GPU
In the GPU-only programming model described in Chapter 4, three major parts can be
discerned: (1) integration of differential equations and Jacobian matrix computation, (2)
LU decomposition of the Jacobian matrix, and (3) solution of the linear algebraic equations,
updating and saving the required variables, and GPU-CPU communication time. To get
an estimate of the timing load of each part, the results of the elapsed time for these specific
parts as a fraction of the total simulation time, and for various system sizes used in Chapter
4 are listed in Table 5.2. These results reveal that LU decomposition (i.e. PART2 in Table
5.2) is the most time-consuming part of the simulation. Thus, the part that would benefit
most from using multiple GPUs to reduce the simulation time is the LU factorization. In
this section we will use parallel processing to significantly improve this timing.
Tearing methods take advantage of the block structure of the system of equations. In a
99
Table 5.2: System scale versus fraction of simulation time elapsed for each major part.PART1: integration and Jacobian matrix computations, PART2: LU decomposition, andPART3: linear algebraic solution, updating and saving variables, and communication time.
more than half or quarter of that in the single GPU application.
5.5 Summary
The main goal in this chapter was to demonstrate the practical aspects of utilizing multi-
ple GPUs. A parallel processing technique can be implemented on any parallel processor
based hardware, for example using a cluster consisting of hundreds of PC’s. However,
employing a large cluster has some drawbacks as well: it is quite expensive, is not always
available, takes a lot of space and requires considerable maintenance. By including GPU
units in the simulation and appropriate programming of GPUs, a regular PC can have the
performance of a super computer with much less price and energy usage. Moreover, these
GPUs are affordable for personal, research, and industry applications.
109
In this chapter, two parallel processing based techniques implemented on a Tesla S1070
unit. The techniques used here are from tearing and relaxation categories, explained in
Chapters 2 and 3. The experimental results revealed that algorithm-level decomposition,
as it happens in the Instantaneous Relaxation method, is more efficient than task level
decomposition.
Although the multi-GPU server with its current technology looks very capable, its API
still is in its infancy. Performance of the multi-GPU algorithm can be further increased by
direct GPU to GPU communication. We await NVIDIA’s CUDA support for direct inter-
GPU communication instead of communication through the CPU.
110
6Summary and Conclusions
Transient stability analysis is a major requirement for the planning and safe operation of
power systems. It is the core of any DSA tool in the energy management system. However,
time domain transient stability simulation of large-scale power systems is computationally
very demanding. The transient stability problem is rich in parallelism which makes it very
suitable for applying parallel processing based techniques.
The goal in this thesis is to accelerate the transient stability simulation. To do so, the in-
vestigation in this thesis branched into two directions. In part one the focus is the real-time
implementation of transient stability simulation. As the real-time simulator has a parallel
processor architecture, it is unavoidable to have a parallel processing based technique to
use the simulator’s capacity. The IR method was proposed and successfully implemented
for this purpose, and is shown to give both accuracy and efficiency for PC-cluster based ar-
chitecture. The main outcome of this approach is that it uses the program-level parallelism
that inherently exists in the nature of the transient stability problem. In the second part the
objective is still the acceleration of the transient stability simulation for larger systems but
by using the general purpose computing capacity of the GPUs. The use of GPU requires
the rethinking and re-engineering of the problem solution in a SIMD-based programming
model. The results obtained in this part revealed the advantage of GPU-based simulation
over the CPU-based one for large-scale systems. By using single GPU it became possible
to model large-scale systems that take several hours of CPU time in a few minutes. Inte-
grating the IR method with the multiple GPUs was the other achievement of this thesis
111
that not only increased the scale of largest implementable system but also overcame the
limitation existed in the current GPUs.
6.1 Contributions of This Thesis
The main contributions of this thesis are summarized as follows:
• This thesis has a significant practical value. Although transient stability has been
formulated and it has a rich literature resources, in this thesis the effort was to aggre-
gate the abstract of all the required equations, for synchronous machine and network
modeling, and step-by-step numerical methods to solve these equations. Moreover,
in both real-time implementation as well as single/multiple GPU programming the
achieved experiences and difficulties that may exist were clearly explained. This type
of knowledge cannot be usually found in power systems literature.
• The IR method proposed in Chapter 3 showed an efficient performance for both real-
time simulation as well as multiple GPU implementation. Integrating this method
with the slow coherency based partitioning and its implementation on a general pur-
pose state-of-the-art real-time simulator resulted in an inexpensive and efficient real-
time simulator. In the GPU applications, the IR method was also very helpful to
overcome the technology restriction existing in the present GPUs. By the use of this
method it was possible to conduct the transient stability simulation of large-scale
power systems which are modeled in detail.
• The software developed for both real-time simulation as well as GPU application,
is designed in such a way to be easy to expand to include more models of power
system elements in its library. It is also easy in both cases to change the number of
processor nodes or GPUs which are running in parallel.
• This is the first time that GPU is used for dynamic computations in power systems.
This research will introduce GPUs to the power systems experts and inspire them to
use GPUs for other burdensome computations such as load flow and electromagnetic
transient studies.
6.2 Directions for Future Work
This research can be continued in several ways for the transient stability simulation of
power systems. First, the software developed for both real-time simulation as well as GPU
112
codes have the capacity to be further improved. For instance, including more models for
synchronous machines, AVR, PSS, and loads, adding more elements such as protection
devices, as well as the ability for performing various types of contingency studies all are
cases that lead to provide a complete set of transient stability tool. Having this tool and
using the IR algorithm as the core of parallel processing method the general purpose real-
time simulator can be utilized as a real-time transient stability simulator.
It is anticipated that the GPU can play an important role in realizing the ultimate goal of
online or real-time dynamic security assessment in the energy control center. The transient
stability simulation algorithm in this research work employed the implicit Trapezoidal
integration method along with the iterative Newton-Raphson procedure. However, as
reported in Chapter 1, there exist many other possibilities for solving the nonlinear DAEs
applicable to the transient stability problem, such as:
• explicit or implicit integration methods
• iterative and non-iterative solvers
• simultaneous or partitioned solution approaches
• application of sparse methods to solve linear algebraic equations [96].
In addition, it is also possible to implement other parallel processing based techniques to
investigate higher speed-ups. It is predicted that if a method accelerates the CPU-based
simulation, it would also accelerate the GPU-based model, if that approach was efficiently
implemented on the GPU.
Existing real-time simulators used in the power system area are clusters made up of
CPU or DSP based hardware. Each rack of these simulators costs several hundreds of
dollars and are not affordable for all industry and academic customers. Moreover, the
maximum size of the system that can be simulated by a rack of PC-cluster is very limited.
The price of the GPU-cluster is much lower than the PC-cluster simulator while its com-
puting capacity is much higher. Therefore, a worthwhile research goal is to move toward
using GPUs for the real-time simulations. Certainly, GPU has the capacity for this purpose,
but the important points are how to manage or force a GPU code to run in real-time and
second, how to perform the hardware-in-the-loop simulations. The former is mainly the
matter of software development while the later is the hardware issue.
Recently, NVIDIA represented next-generation of CUDA architecture GPUs named
Fermi. The complexity of the Fermi architecture is managed by a multi-level program-
113
ming model that allows software developers to focus on algorithm design rather than the
details of how to map the algorithm to the hardware, thus improving productivity. The
most important difference of this new generation of GPUs in comparison with existing
ones is that Fermi supports simultaneous execution of multiple kernels from the same ap-
plication, each kernel being distributed to one or more SMs on the device. This capability
avoids the situation where a kernel is only able to use part of the device and the rest goes
unused [97]. Exploiting this technology would let us implement a program or task level
parallel transient stability simulation algorithm (such as Instantaneous Relaxation or ILU
methods) on a single Fermi GPU in the future.
114
Bibliography
[1] R. Schainker, G. Zhang, P. Hirsch, C. Jing, “On-line dynamic stability analysis usingdistributed computing,” Power and Energy Society General Meeting, Conversion and Deliv-ery of Electrical Energy in the 21st Century, pp. 1-7, 2008.
[2] EPRI TR-104352, “Analytical Methods for Contingency Selection and Ranking for Dy-namic Security Analysis,” Power and Energy Society General Meeting, Conversion and De-livery of Electrical Energy in the 21st Century, Project 3103-03 Final Report, Sept. 1994.
[3] IEEE Std 100, “The Authoritative Dictionary of IEEE Standards Terms Seventh Edi-tion,” 2000.
[4] H. W. Dommel, “Techniques for analyzing electromagnetic transients,” IEEE Comput.Appl. Power, vol. 10, Issue 3, pp. 18-21, July 1997.
[5] IEEE/CIGRE Joint Task Force on Stability Terms and Definitions, “Definition and clas-sification of power system stability,” IEEE Trans. Power Syst., vol. 19, no. 2, pp. 1387-1401,May 2004.
[6] E. W. Kimbark, Power system stability, vol. 1, New York: J. Wiley, 1948.
[7] M. Pavella, P. G. Murthy, Transient stability of power systems: theory and practice, Chich-ester, New York: Wiley, 1994.
[8] P. M. Anderson, A. A. Fouad, Power system control and stability, Iowa State UniversityPress, 1977.
[9] P. Kundur, Power system stability and control, McGraw-Hill, 1994.
[10] IEEE Std 1110-2002, “IEEE guide for synchronous generator modeling practices andapplications in power system stability analyses,” IEEE Power Eng. Soc., pp. 1-81, Nov.2003.
[11] A. A. Fouad, V. Vittal, Power system transient stability analysis using the transient energyfunction method, Englewood Cliffs, N.J.: Prentice Hall, 1992.
[12] B. Stott, “Power system dynamic response calculations,” Proc. of IEEE, vol. 67, no. 2,pp. 219-241, Jul. 1979.
115
[13] P. M. Anderson, B. L. Agrawal, J. E. Van Ness, Subsynchronous resonance in powersystems, IEEE PRESS, New York, 1990.
[14] M. Sultan, J. Reeve, R. Adapa, “Combined transient and dynamic analysis of HVDCand FACTS systems,” IEEE Trans. Power Del., vol. 13, no. 4, pp. 1271-1277, Oct. 1998.
[15] T. Berry, A. R. Daniels, R. W. Dunn, “Real-time simulation of power system transientbehaviour,” Proceedings of 3rd International Conference on Power System Monitoring andControl, pp. 122-127, June 1991.
[16] D. Jakominich, R. Krebs, D. Retzmann, A. Kumar, “Real time digital power systemsimulator design considerations and relay performance evaluation,” IEEE Trans. PowerDelivery, vol. 14, no. 3, pp. 773-781, July 1999.
[17] M. O. Faruque, V. Dinavahi, “Hardware-in-the-loop simulation of power electronicsystems using adaptive discretization,” IEEE Trans. Industrial Electronics, vol. 57, no. 4,pp. 1146-1158, Apr. 2010.
[18] R. H. Park, E. H. Bancker, “System stability as a design problem,” AIEE Trans., vol.48, pp. 170-194, 1929.
[19] O. G. C. Dahl, Electric power circuits, Vol. II: Power system stability, McGraw-Hill, NewYork, 1938.
[20] H. H. Skilling, M. H. Yamakawa, “A graphical solution of transient stability,” ElectricalEng., vol. 59, pp. 462-465, 1940.
[21] M. Pavella, D. Ernst, D. Ruiz-Vega, Transient stability of power systems: a unified approachto assessment and control, Kluwer Academic Publishers, 2000.
[22] P. L. Dandeno, P. Kundur, “A non-iterative transient stability program including theeffects of variable load-voltage characteristics,” IEEE Trans. Power App. Syst., vol. PAS-92, pp. 1478-1484, 1973.
[23] N. Stanton, S. N. Talukdar, “New integration algorithms for transient stability stud-ies,” IEEE Trans. Power App. Syst., vol. PAS-89, pp. 985-991, May 1970.
[24] M. M. Adibi, P. M. Hirsch, J. A. Jordan, “Solution methods for transient and dynamicstability,” Proc. IEEE, vol. 62, pp. 951-958, July 1974.
[25] H. L. Fuller, P. M. Hirsch, M. B. Lambie, “Variable integration step transient analysis-VISTA,” Proc. IEEE PICA Conf., pp. 156-161, 1973.
[26] W. D. Humpage, K. P. Wang, Y. W. Lee, “Numerical integration algorithms in power-system dynamic analysis,” Proc. Inst. Elec. Eng., vol. 121, pp. 467-473, 1974.
116
[27] G. Kron, “Diakoptics-piecewise solutions of large systems,” Elect. J., London, vol. 158-vol. 162, also published by McDonald, London, 1963.
[28] M. La Scala, M. Brucoli, F. Torelli, M. Trovato, “A gauss-jacobi-block-newton methodfor parallel transient stability analysis,” IEEE Trans. Power Syst., vol. 5, no. 4, pp. 1168-1177, May 1990.
[29] M. L. Crow, M. Ilic, “The parallel implementation of the waveform relaxation methodfor transient stability simulations,” IEEE Trans. Power Syst., vol. 5, no. 3, pp. 922-932,Aug. 1990.
[30] M. La Scala, R. Sbrizzai, F. Torelli, “A pipelined-in-time parallel algorithm for tran-sient stability analysis,” IEEE Trans. Power Syst., vol. 6, no. 2, pp. 715-722, May 1991.
[31] F. L. Alvarado, “Parallel solution of transient problems by trapezoidal integration,”IEEE Trans. Power Appar. and Syst., vol. PAS-98, no. 3, pp. 1080-1090, May/June 1979.
[32] M. Shahidehpour, Y. Wang, Communication and Control in Electric Power Systems: Ap-plications of Parallel and Distributed Processing. New Jersey, US: John Wiley and Sons,2003.
[33] M. J. Flynn, “Very high speed computing systems,” Proc. of the IEEE, pp. 1901-1909,Dec. 1966.
[34] H.H. Happ, C. Pottle, K.A. Wirgau, “An assessment of computer technology for largescale power system simulation,” Power Industry Computer Applications Conference, pp.316-324, May 1979.
[35] F. M. Brasch, J. E. Van Ness, S. C. Kang, “Simulation of a multiprocessor network forpower system problems,” IEEE Trans. Power App. Syst., vol. PAS-101, no. 2, pp. 295-301,Feb. 1982.
[36] S. Y. Lee, H. D. Chiang, K. G. Lee, B. Y. Ku, “Parallel power system transient stabilityanalysis on hypercube multiprocessors,” IEEE Trans. Power Syst., vol. 6, no. 3, pp. 1337-1343, Aug. 1991.
[37] H. Taoka, S. Abe, S. Takeda, “Fast transient stability solution using an array proces-sor,” IEEE Trans. Power App. Syst., vol. PAS-102, no. 12, pp. 3835-3841, Dec. 1983.
[38] M. Takatoo, S. Abe, T. Bando, K. Hirasawa, M. Goto, T. Kato, T. Kanke, “Floatingvector processor for power system simulation,” IEEE Trans. Power App. Syst., vol. PAS-104, no. 12, pp. 3361-3366, Dec. 1985.
[39] P. Forsyth, R. Kuffel, R. Wierckx, J. Choo, Y. Yoon, T. Kim, “Comparison of transientstability analysis and large-scale real time digital simulation,” Proc. of the IEEE PowerTech., vol. 4, pp. 1-7, Sept. 2001.
117
[40] NVIDIA, “NVIDIA CUDA Programming Guide,” June, 2008.
[41] S. C. Savulescu, Real-time stability assessment in modern power system control centers,IEEE Press Series on Power Engineering, 2009.
[42] R. Krebs, E. Lerch, O. Ruhle, “Blackout prevention by dynamic security assessmentafter severe fault situations,” CIGRE Proc. on Relay Protection and Substation Automationof Modern Power Systems, pp. 1-9, Sept. 2007.
[43] J. I. Mitsche, “Stretching the limits of power system analysis,” IEEE Computer Appli-cations in Power, pp. 16-21, Jan. 1993.
[44] G. Aloisio, M. A. Bochicchio, M. La Scala, R. Sbrizzai, “A distributed computingapproach for real-time transient stability analysis,” IEEE Trans. Power Syst., vol. 12, no.2, pp. 981-987, May 1997.
[45] F. F. de Mello, J. W. Felts, T. F. Laskowski, L. J. Opple, “Simulating fast and slowdynamic effects in power systems,” IEEE Computer Applications in Power Syst., pp. 33-38, July 1992.
[46] Y. Chen, C. Shen, J. Wang, “Distributed transient stability simulation of power sys-tems based on a Jacobian-free Newton-GMRS method,” IEEE Trans. Power Syst., vol. 24,no. 1, pp. 146-156, Feb. 2009.
[47] IEEE Std 421.5-2005, “IEEE recommended practice for excitation system models forpower system stability studies,” IEEE Power Eng. Soc., pp. 1-85, Apr. 2006.
[48] W. Janischewskyj, P. Kundur, “Simulation of the non-linear dynamic response of in-terconnected synchronous machines, Part I- machine modeling and machine-networkinterconnection equations,” IEEE Trans. Power App. Syst., vol. PAS-91, no. 5, pp. 2064-2069, Sept. 1972.
[49] IEEE Task Force on Computer and Analytical Methods, “Parallel processing in powersystems computation,” IEEE Trans. Power Syst., vol. 7, no. 2, pp. 629-638, May 1992.
[50] J. R. Gurd, “A taxonomy of parallel computer architectures,” Proc. of InternationalConference on Design and Application of Parallel Digital Processors, pp. 57-61, Apr. 1988.
[51] L.-F. Pak, M.O. Faruque, Xin Nie, V. Dinavahi, “A versatile cluster-based real-timedigital simulator for power engineering research,” IEEE Trans. Power Syst., vol. 21, no.2, pp. 455-465, May 2006.
[52] J. K. White, A. L. Sangiovani-Vincentelli, Relaxation techniques for the simulation of VLSIcircuits, Kluwer Academic Publisher, Boston, MA, 1987.
118
[53] N. Rabbat, A. Sangiovanni-Vincentelli, H. Y. Hsieh, “A multilevel newton algorithmwith macromodeling and latency for the analysis of large-scale nonlinear circuits in thetime domain,” IEEE Trans. Circ. and Syst., vol. 26, no. 9, pp. 733-741, Sept. 1979.
[54] J. M. Ortega, W. C. Rheinboldt, Iterative solution of nonlinear equations in several vari-ables, Academic Press, 1970.
[55] A. R. Newton, A. Sangiovanni-Vincentelli, “Relaxation-based electrical simulation,”IEEE Trans. Electron Devices, vol. 30, no. 9, pp. 1184-1207, Sept. 1983.
[56] H. H. Happ, “Diakoptics-the solutions of system problems by tearing,” Proc. of theIEEE, vol. 62, no. 7, pp. 930-940, July 1974.
[57] W. L. Hatcher, F. M. Brasch, J. E. Van Ness, “A feasibility study for the solution oftransient stability problems by multiprocessor structures,” IEEE Trans. Power Appar.Syst., vol. PAS-96, no. 6, pp. 1789-1797, Nov./Dec. 1977.
[58] S. Y. Lee, H. D. Chiang, K. G. Lee, B. Y. Ku, “Parallel power system transient sta-bility analysis on hypercube multiprocessors,” IEEE Proc. of Power Industry ComputerApplications Conference, pp. 400-406, May 1989.
[59] J. S. Chai, N. Zhu, A. Bose, D. J. Tylavsky, “Parallel newton type methods for powersystem stability analysis using local and shared memory multiprocessors,” IEEE Trans.Power Syst., vol. 6, no. 4, pp. 1539-1545, Nov. 1991.
[60] M. La Scala, A. Bose, “Relaxation/Newton methods for concurrent time step solutionof differential-algebraic equations in power system dynamic simulation,” IEEE Trans.Circ. Syst., vol. 40, no. 5, pp. 317-330, May 1993.
[61] M. La Scala, G. Sblendorio, R. Sbrizzai, “Parallel-in-time implementation of transientstability simulations on a transputer network,” IEEE Trans. Power Syst., vol. 9, no. 2, pp.1117-1125, May 1994.
[62] E. Lelarasmee, A. E. Ruehli, A. Sangiovanni-Vincentelli, “The waveform relax-ation method for time-domain analysis of large scale integrated circuits,” IEEE Trans.Computer-Aided Design of Integrated Circ. and Syst., vol. 1, no. 3, pp. 131-145, Jul. 1982.
[63] M. Ilic-Spong, M. L. Crow, M. A. Pai, “Transient stability simulation by waveformrelaxation methods,” IEEE Trans. Power Syst., vol. PWRS-2, no. 4, pp. 943-952, Nov.1987.
[64] M. L. Crow, M. Ilic, J. White, “Convergence properties of the waveform relaxationmethod as applied to electric power systems,” in Proc. IEEE Conf. on Circuits and Systems,May 1989.
119
[65] M. L. Crow, “Waveform relaxation methods for the simulation of systems of differen-tial/algebraic equations with application to electric power systems,” Ph.D. Dissertation,University of Illinois at Urbana-Champaign, 1990.
[66] L. Hou, A. Bose, “Implementation of the waveform relaxation algorithm on a sharedmemory computer for the transient stability problem,” IEEE Trans. Power Syst., vol. 12,no. 3, pp. 1053-1060, Aug. 1997.
[67] J. Sun, H. Grotstollen, “Fast time-domain simulation by waveform relaxation meth-ods,” IEEE Trans. Circ. and Syst., vol. 44, no. 8, pp. 660-666, Aug. 1997.
[68] B. A. Carre, “Solution of load-flow problems by partitioning systems into trees,” IEEETrans. Power App. Syst., vol. PAS-87, no. 11, pp. 1931-1968, Nov. 1968.
[69] P. Podmore, “Identification of coherent genrators for dynamic equivalents,” IEEETrans. Power App. Syst., vol. PAS-97, no. 4, pp. 1344-1354, Aug. 1978.
[70] P. Podmore, “Identification of coherent genrators for dynamic equivalents,” IEEETrans. Power App. Syst., vol. PAS-97, no. 4, pp. 1344-1354, Aug. 1978.
[71] S. B. Yusof, G.J. Rogers, R.T.H. Alden, “Slow coherency based network partitioningncluding load buses,” IEEE Trans. Power Syst., vol. 8, no. 3, pp. 1375-1382, Aug. 1993.
[72] M. H. Haque, A. H. M. A. Rahim, “An efficient method of identifying coherent gener-ators using taylor series expansion,” IEEE Trans. Power Syst., vol. 3, no. 3, pp. 1112-1118,Aug. 1988.
[73] N. Muller, V. H. Quintana, “A sparse eigenvalue-based approach for partitioningpower networks,” IEEE Trans. Power Syst., vol. 7, no. 2, pp. 520-527, May 1992.
[74] P. G. McLaren, R. Kuffel, R. Wierckx, J. Giesbrecht, L. Arendt, “A real time digitalsimulator for testing relays,” IEEE Trans. Power Delivery, vol. 7, no. 1, pp. 207-213, Jan.1992.
[75] D. Par, G. Turmel, J.-C. Soumagne, V. A. Do, S. Casoria, M. Bissonnette, B. Marcoux,D. McNabb, “Validation tests of the hypersim digital real time simulator with a largeAC-DC network,” Proc. Int. Conf. Power System Transients, New Orleans, LA, pp. 577-582, Sept. 2003.
[76] H. W. Dommel, “Digital computer solution of electromagnetic transients in singleand multiphase networks,” IEEE Trans. Power App. Syst., vol. PAS-88, no. 4, pp. 388-399,Apr. 1969.
[77] J. S. Chai, A. Bose, “Bottlenecks in parallel algorithms for power system stabilityanalysis,” IEEE Trans. Power Syst., vol. 8, no. 1, pp. 9-15, Aug. 1993.
120
[78] H. You, V. Vittal, X. Wang, “Slow coherency-based islanding,” IEEE Trans. Power Syst.,vol. 19, no. 1, pp. 483-491, Feb. 2004.
[79] MATLAB User Guides The MathWorks Inc., Natick, MA..
[80] X. Wang, V. Vittal, G. T. Heydt, “Tracing Generator Coherency Indices Using theContinuation Method: A Novel Approach,” IEEE Trans. Power Syst., vol. 20, no. 3, pp.1510-1518, Aug. 2005.
[81] V. Jalili-Marandi, V. Dinavahi, “Instantaneous relaxation based real-time transientstability simulation,” IEEE Trans. Power Syst., vol. 24, no. 3, pp. 1327-1336, Aug. 2009.
[82] D. Blythe, “Rise of the graphics processor,” Proc. of the IEEE, vol. 96, no. 5, pp. 761-778,May 2008.
[83] J. D. Owens, M. Houston, D. Luebke, S. Green, J. E. Stone, J. C. Phillips, “GPU com-puting,” Proc. of the IEEE, vol. 96, no. 5, pp. 879-899, May 2008.
[84] E. Lindholm, J. Nickolls, S. Oberman, J. Montrym, “NVIDIA Tesla: a unified graphicsand computing architecture,” IEEE Micro, vol. 28, no. 2, pp. 39-55, Mar./Apr. 2008.
[85] M. Pharr, GPU Gems 2: programming techniques for high-performance graphics and general-purpose computation, Addison-Wesley Professional, 2005.
[86] A. Gopal, D. Niebur, S. Venkatasubramanian, “DC power flow based contingencyanalysis using graphics processing units,” Proc. of the IEEE Power Tech., pp. 731-736, Jul.2007.
[87] NVIDIA, “CUDA CUBLAS library,” Mar. 2008.
[88] M. Garland, S. Le Grand, J. Nicolls, J. Anderson, J. Hardwick, S. Morton, E. Phillips,Y. Zhang, V. Volkov, “Parallel computing experiences with CUDA,” IEEE ComputerSociety., vol. 28, no. 4, pp. 13-27, Jul./Aug. 2008.
[89] PSS/ETM 31, Program Application Guide, Dec. 2007.
[90] D. N. Ewart, F. D. deMello, “FACE: a digital dynamic analysis program,” PowerIndustry Computer Applications Conference, pp. 1-8, Sept. 1967.
[91] NVIDIA, “Specification: Tesla S1070 GPU computing system,” Oct., 2008.
[92] A. Cevahir, A. Nukada, S. Matsuoka, “Fast conjugate gradients with multiple GPUs,”Computational Science, Springer Berlin / Heidelberg, pp. 893-903, May 2009.
[93] Visual Studio Developer Center, http://msdn.microsoft.com/en-us/library/
[94] BOOST C++ Libraries, http://www.boost.org/
121
[95] Y. Saad, Iterative methods for sparse linear systems, Society of Industrial and AppliedMathematics, 2003.
[96] M. Wang, H. Klie, M. Parashar, H. Sudan, “Solving sparse linear systems on NVIDIATesla GPUs,” Computational Science - ICCS 2009, Springer Berlin/ Heidelberg, pp. 864-873.
[97] P. N. Glaskowsky, “NVIDIAs Fermi: The first complete GPU computing architecture,”A white paper prepared under contract with NVIDIA Corporation, pp. 1-26, Sept. 2009.
122
Aarea1.c S-function Complete Source Code
This is the main S-function program that implements area1.c S-function initialization,simulation loop, and output.
The performance log in this Appendix shows the RTX-LAB simulator nodes timing sched-ule for simulation of a large-scale power system described in Chapter 3. For this powersystem, all the 8 nodes of the simulator have been used; however, to save space, here just2 nodes are being demonstrated: the master node (sm area1), and one of the slave nodes(ss area2). Exploring this report is useful to understand how the parallel architecture ofthe real-time simulator works. The sequence of events, the duration of each event, and theprobable obstacles that might be in the simulation can be extracted from the performancelog. However, the Number of Overruns is the most important item in this report. If thisitem is 0 for all nodes the simulation was indeed running in real-time.
Memory configuration 16.0 GB total configured as 4.0 GB per GPU
Memory I/O 512-bit per GPU
System I/O Two PCIe connections. Each connection leads to two of the four GPUs.
PCI Express cables � A 0.5-meter cable is included in the “turnkey” kit
� A 2.0-meter cable is available but must be ordered separately
154
Mechanical Specification
System Chassis
The Tesla S1070 (Figure 4) uses a 1U form factor chassis and conforms to the EIA 310E specification for 19-inch 4-post racks with 900 mm to 1000 mm depth. The chassis dimensions are 1.73 inches high × 17.5 inches wide × 28.5 inches deep.
Figure 4. System Chassis Drawing
155
Tesla S1070 GPU Computing System Specification
PCI Express Cable
The Tesla S1070 uses 0.5-meter PCI Express cables as the standard connection to the host system(s). Figure 6 shows the dimensions of this cable and its connectors. A 2.0-meter version of the cable is also available as a standalone accessory and uses the same connectors as the 0.5-meter cable.
Note: For Figure 6 the dimensions are in millimeters unless otherwise labeled.
Figure 6. PCI Express Cable (0.5 Meter)
The minimum bend radius is 38.7 mm for the PCI Express cable. Figure 7 shows details of how this is measured relative to the I/O plate on the host interface card and relative to the cable/connector interface.
156
Tesla S1070 GPU Computing System Specification
Figure 7. PCI Express Cable Minimum Bend Radius
Rails for Rack Mounting
The Tesla S1070 uses a pair of rails for mounting to a 4-post, EIA rack. The rails can expand to fit a distance from 730 mm (28.74 inches) to 922 mm (36.3 inches) for the inside dimension between the front and rear posts. See Figure 8 for the exact dimension details.
Note: For Figure 8 the dimensions are in millimeters unless noted in square brackets
[xx.yy +/- zz] that indicate dimensions in inches.
157
Tesla S1070 GPU Computing System Specification
Figure 8. Rail for Rack Mounting
158
Tesla S1070 GPU Computing System Specification
Environmental Specifications
Table 2. Environmental Specifications and Conditions
Specifications Conditions
Operating Input Power 90 to 274 VAC
50 to 60 Hz
Temperature 10 °C to 35 °C (50 °F to 95 °F ) at sea level with an altitude derating of 1.0 °C per every 1000 ft.
Humidity 10 % to 80 % RH, 28 °C (82.4 °F) maximum wet bulb temperature, non-condensing
Altitude 0 to 5000 feet mean sea level (MSL)
Shock Half sine 40g, 2 ms duration
Vibration Sinusoidal 0.25g, 10 to 500 Hz, 3 axis. Random 1.0 Grms, 10 to 500 Hz
Acoustics TBD dBa at 1 meter in front of system
Airflow 143 cfm maximum
Non-Operating Temperature -40 °C to 60 °C (-40 °F to 140 °F)
Humidity 10 % to 80 % RH, 38.7 °C (101.7 °F) maximum wet bulb temperature, non-condensing
Altitude 0 to 10,000 feet mean sea level (MSL) with maximum allowable rate of altitude change of 2000 ft/min.
In this section the single-line diagram of the test systems used in this thesis are given. TheScale 1 system is IEEEs New England test system which its complete data and load flowresults are also given in the PSS/E’s *.raw file format. Other test systems are made byduplicating this system.





































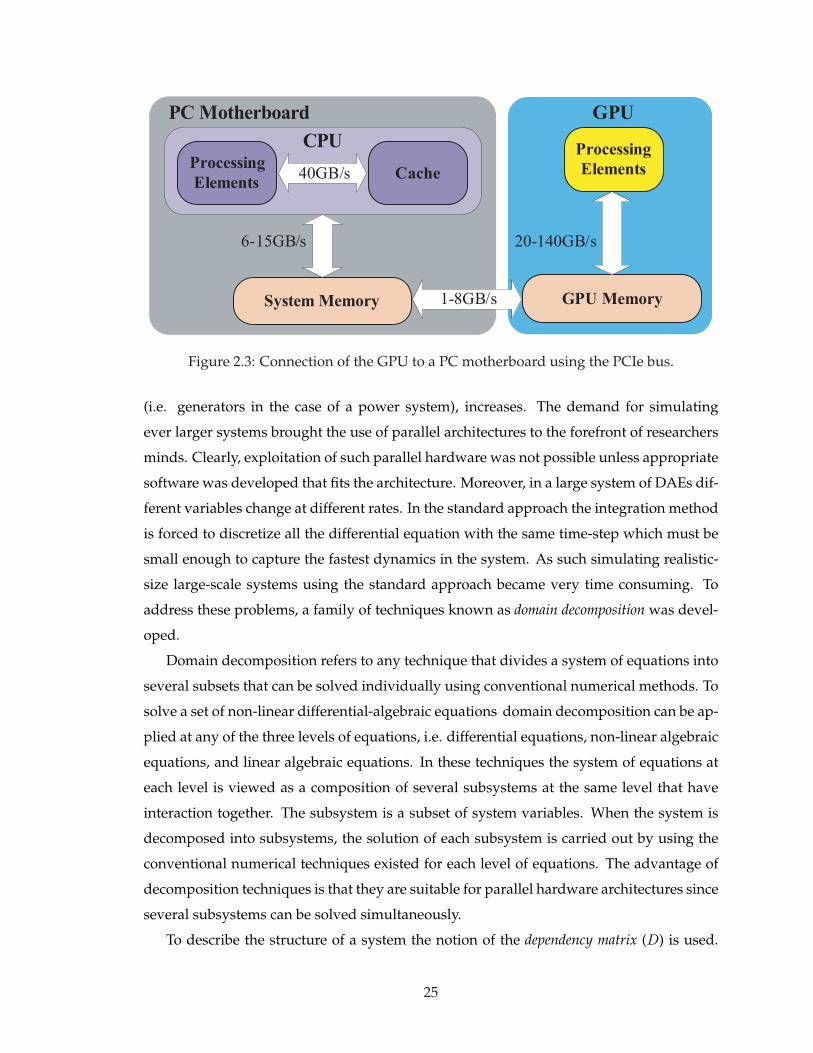























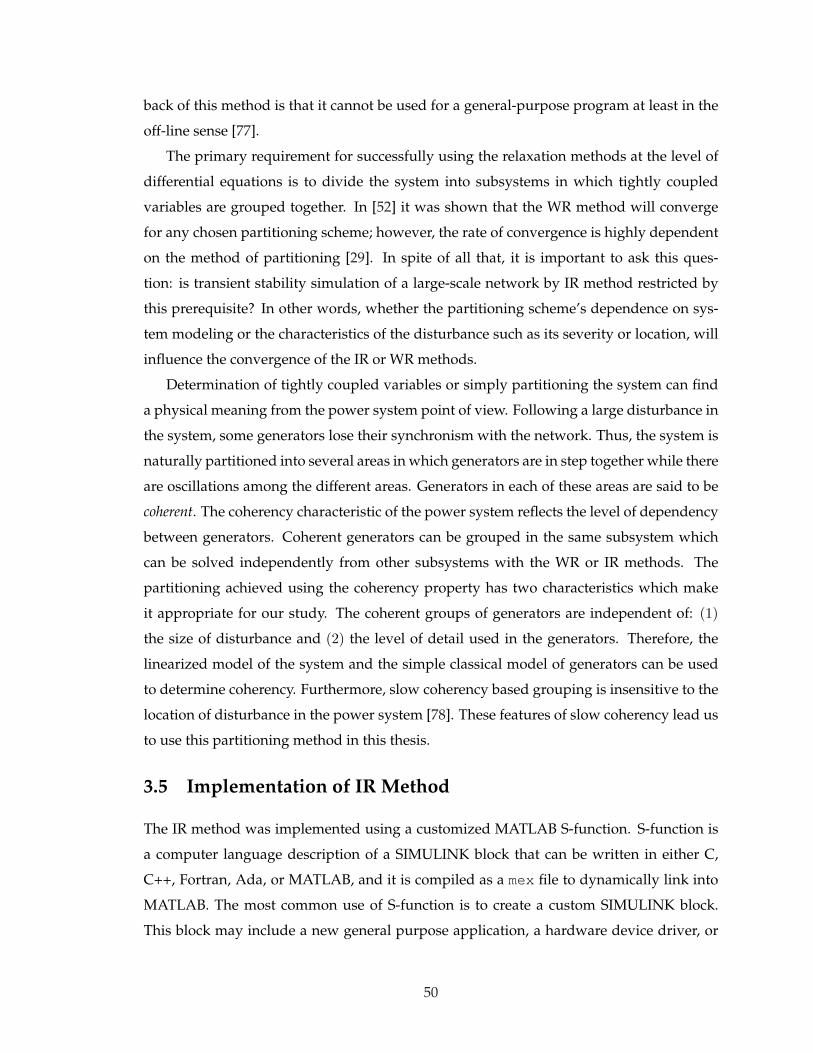




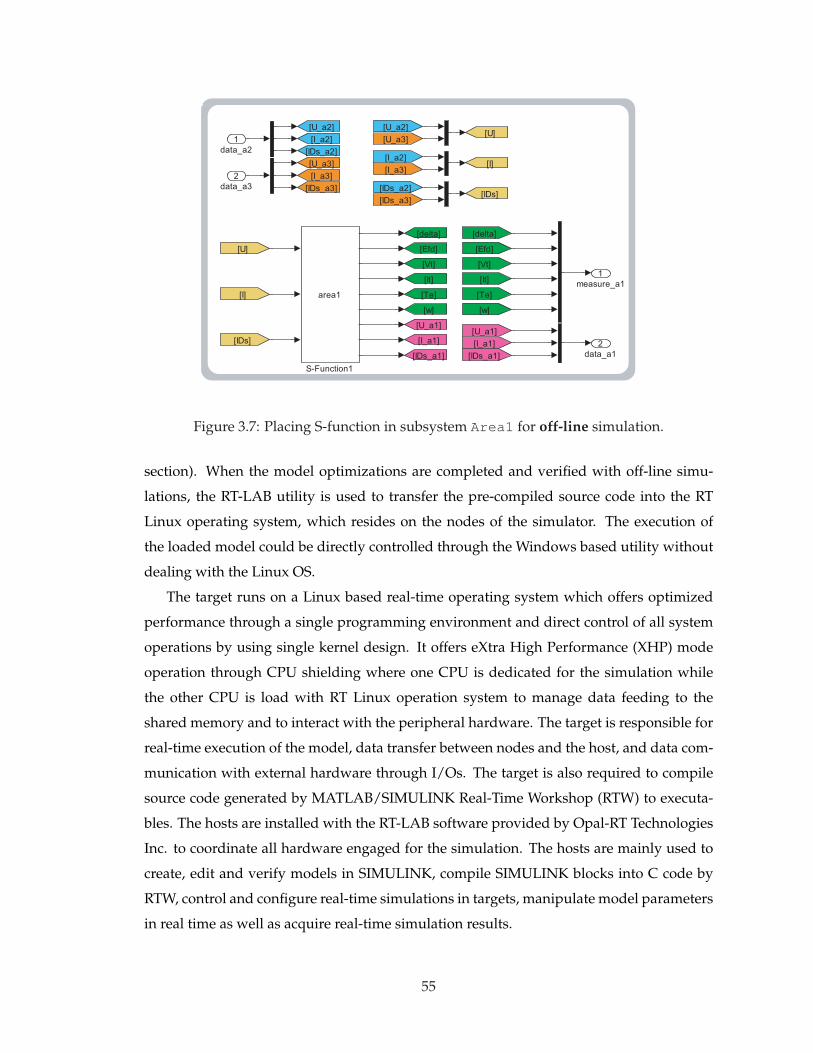











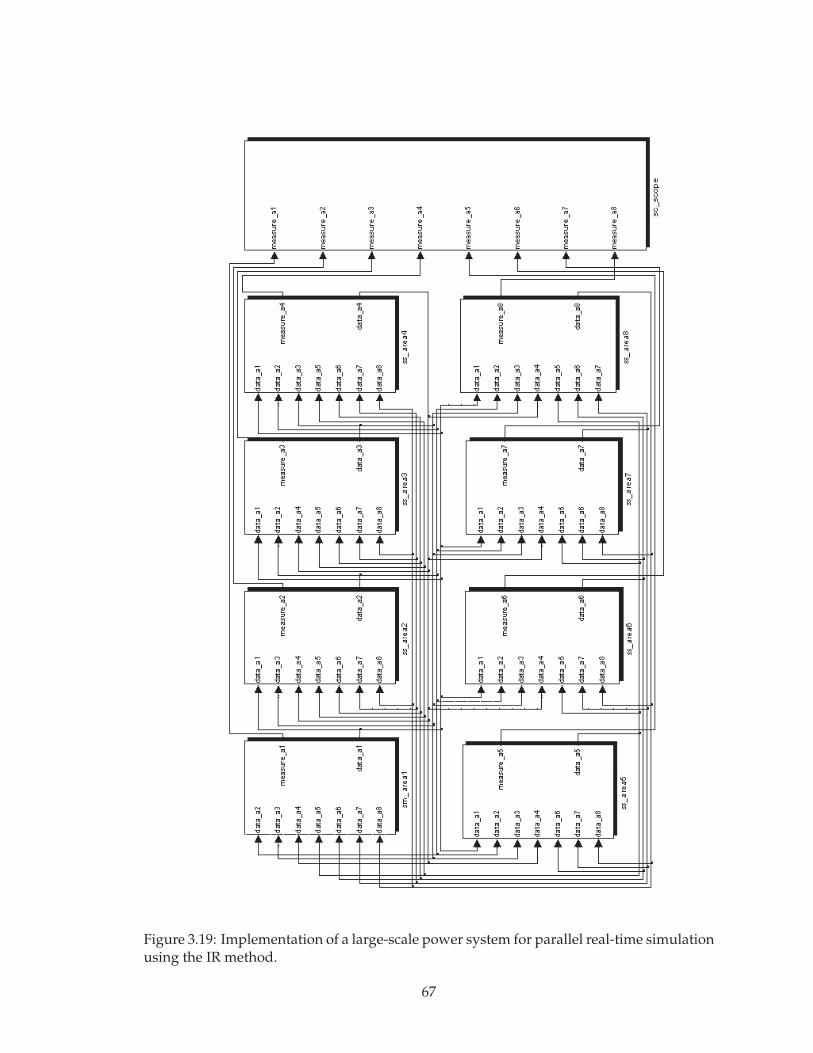




























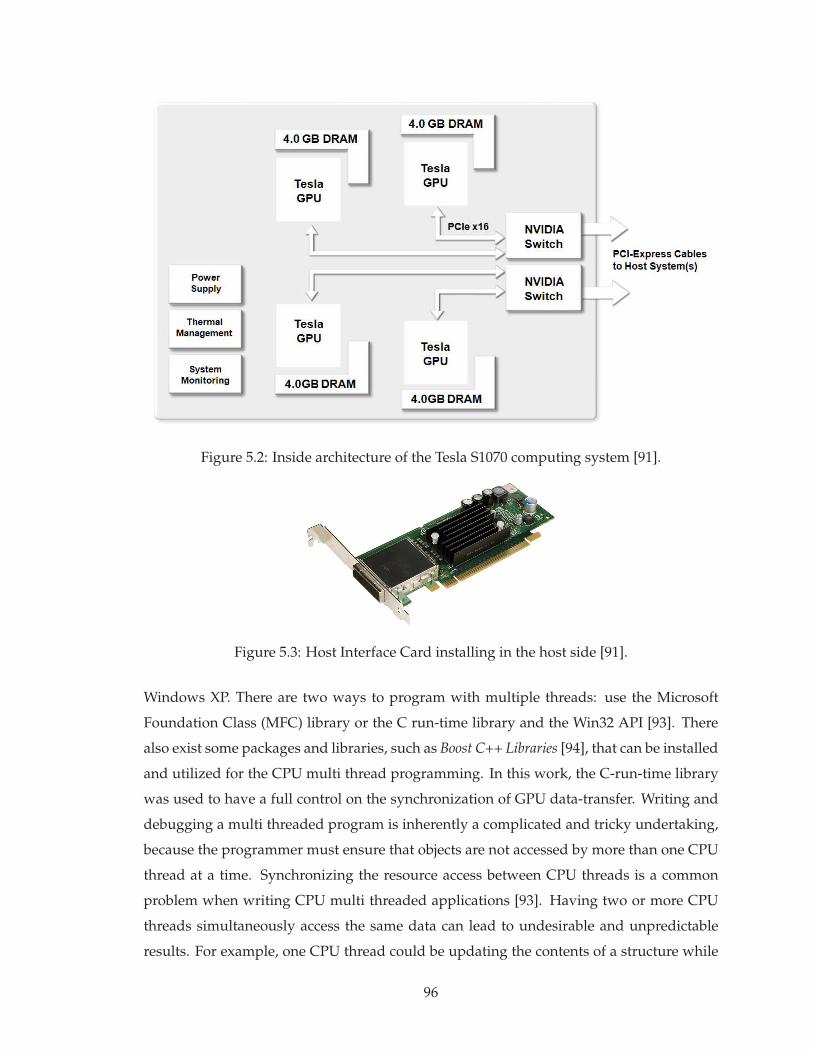









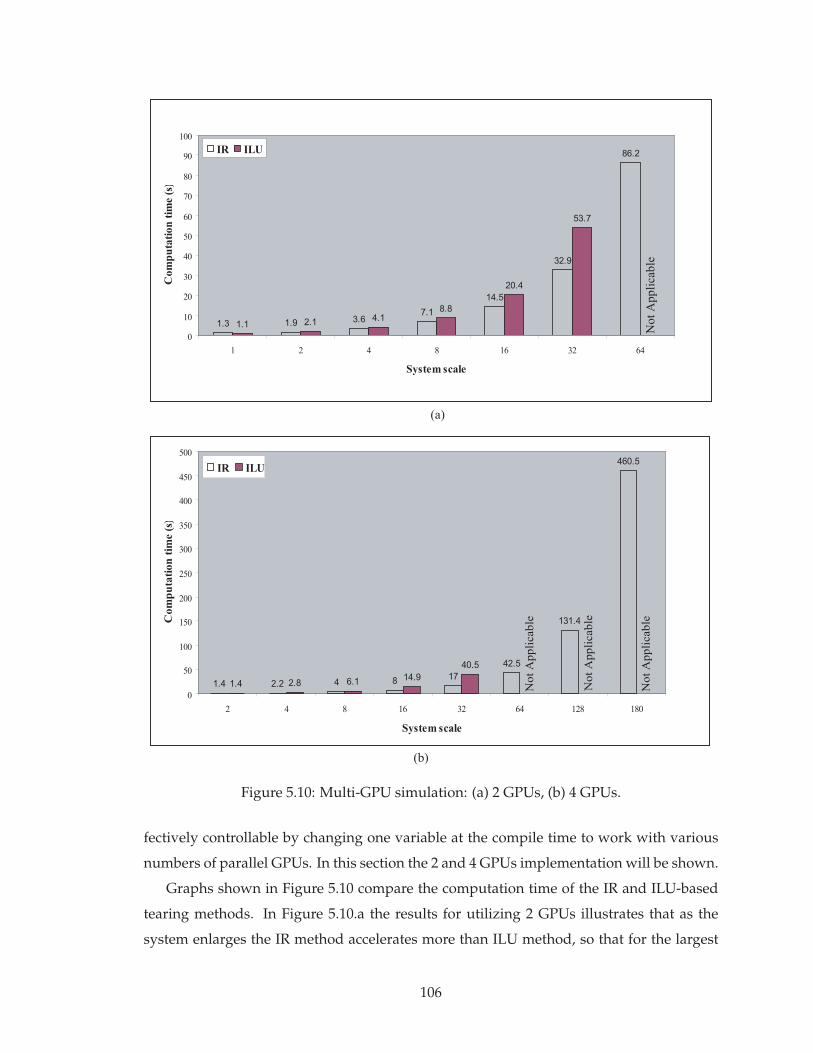









































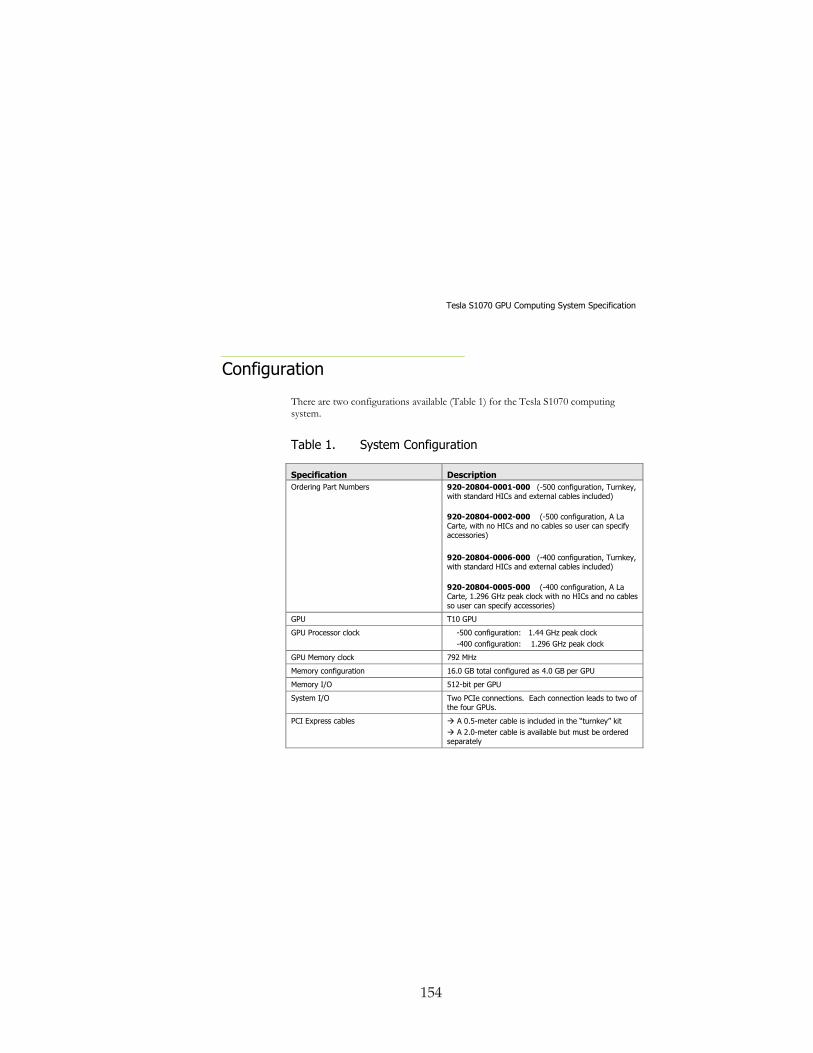


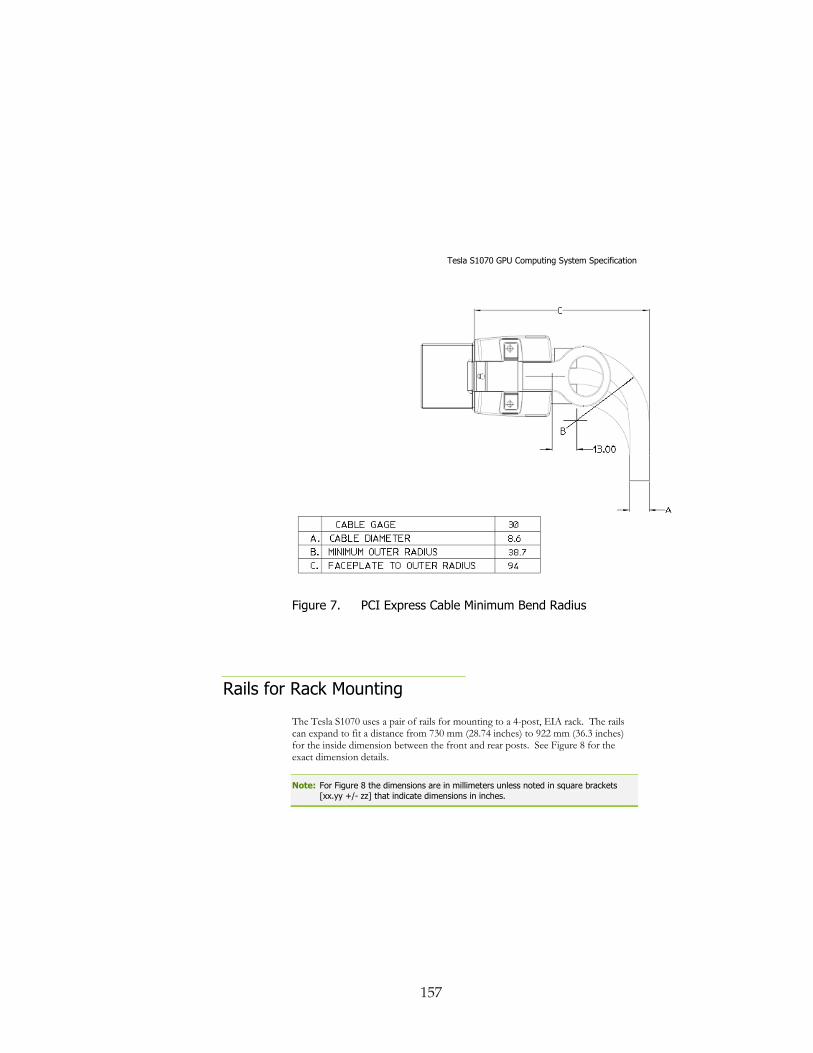













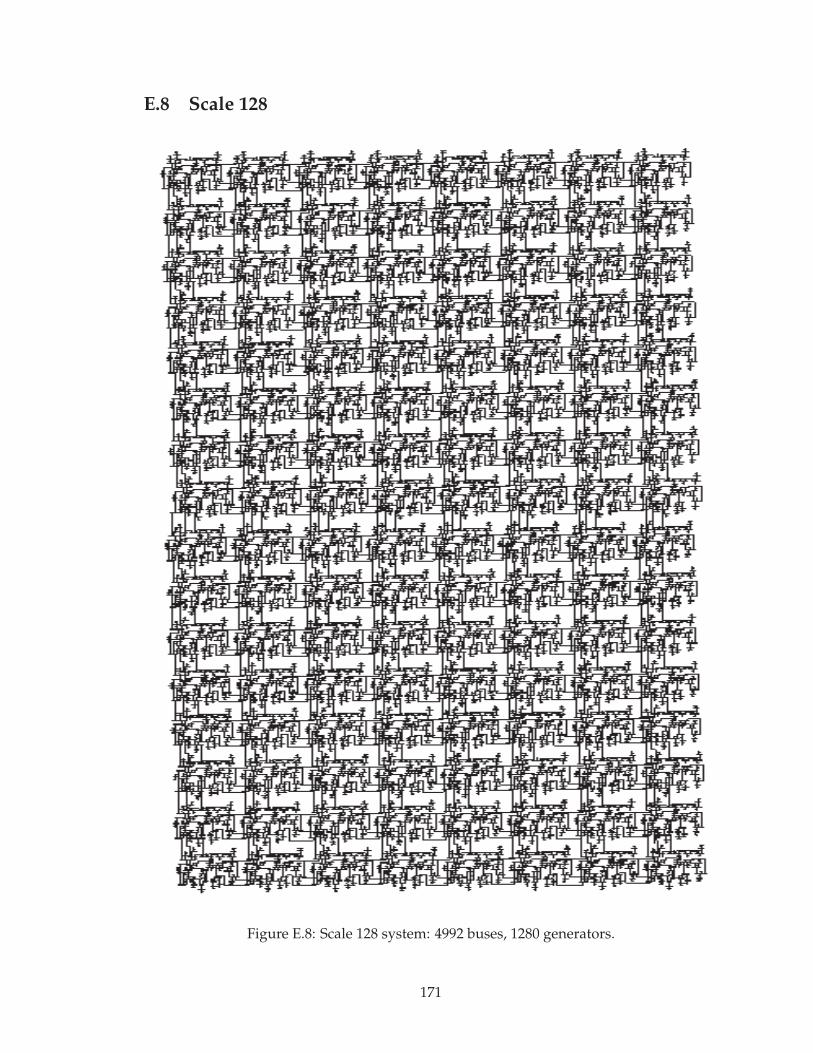





![Iterative Techniques in Matrix Algebra [0.125in]3.250in0.02in … · 2012. 8. 2. · Iterative Techniques in Matrix Algebra Jacobi & Gauss-Seidel Iterative Techniques II Numerical](https://static.documents.pub/doc/80x56/60d554aa32c484202c6296ed/iterative-techniques-in-matrix-algebra-0125in3250in002in-2012-8-2-iterative.jpg)






![New Primalitv Testing and Jacobi Sums · 2018. 11. 16. · [16]. by considering Gauss sums instead of Jacobi sums. This allows us to bypass the higher reciprocity laws that were used](https://static.documents.pub/doc/80x56/60471c73992ef72733652052/new-primalitv-testing-and-jacobi-sums-2018-11-16-16-by-considering-gauss.jpg)





